杭电自动化短学期实验报告-控制系统仿真-2013(DOC)
自动控制原理 实验一 控制系统的电子模拟实验
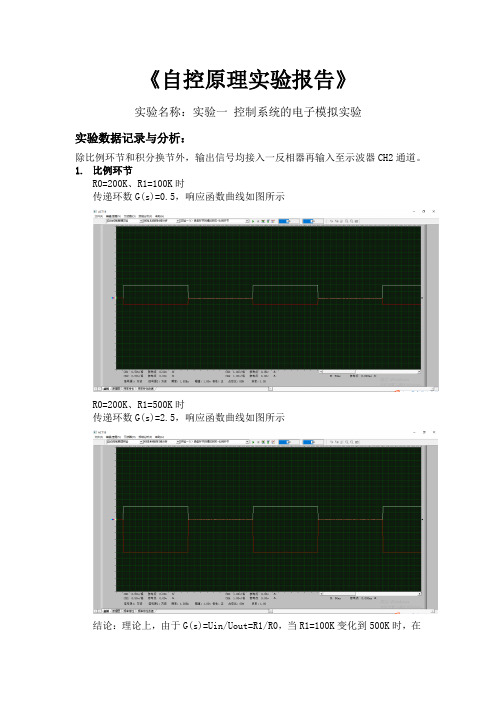
《自控原理实验报告》实验名称:实验一控制系统的电子模拟实验实验数据记录与分析:除比例环节和积分换节外,输出信号均接入一反相器再输入至示波器CH2通道。
1.比例环节R0=200K、R1=100K时传递环数G(s)=0.5,响应函数曲线如图所示R0=200K、R1=500K时传递环数G(s)=2.5,响应函数曲线如图所示结论:理论上,由于G(s)=Uin/Uout=R1/R0,当R1=100K变化到500K时,在输入信号不变的情况下,输出信号幅值应当变为原来的5倍。
由虚拟示波器图像可知输出红线(CH2)代表Uout,当R1=100K变化到500K时,其幅值变为原来的5倍。
这一结果符合理论分析结果。
2.积分环节R0=500K、C=1uF时传递环数G(s)=2/s,响应函数曲线如图所示R0=500K、C=2uF时传递环数G(s)=1/s,响应函数曲线如图所示R0=500K、C=3uF时传递环数G(s)=2/3s,响应函数曲线如图所示结论:理论上,由于G(s)分别为2/s、1/s、2/3s,可知响应曲线图像为斜率分别为2、1、1.5的直线,在输入信号为1V、1Hz的方波时,在有信号输入的阶段响应曲线上升但是斜率不相同,在无信号输入的阶段响应曲线保持不变。
由虚拟示波器图像可知输出红线(CH2)代表Uout。
结果符合理论分析结果。
3.惯性环节R0=200K、R1=200K、C=1uF时测量所得时间常数T=201.667ms理论上,传递环数G(s)=1/(0.2s+1),时间常数理论值为0.2s,响应函数曲线如图所示R0=200K、R1=200K、C=2uF时测量所得时间常数T=416.667ms理论上,传递环数G(s)=1/(0.4s+1),时间常数理论值为0.4s,响应函数曲线如图所示R0=200K、R1=100K、C=1uF时测量所得时间常数T=120ms理论上,传递环数G(s)=0.5/(0.1s+1),时间常数理论值为0.1s,响应函数曲线如图所示结论:实验测得时间常数与理论值基本符合。
杭电《过程控制系统》实验报告
实验时间:5月25号序号杭州电子科技大学自动化学院实验报告课程名称:自动化仪表与过程控制实验名称:一阶单容上水箱对象特性测试实验实验名称:上水箱液位PID整定实验实验名称:上水箱下水箱液位串级控制实验指导教师: 尚群立学生姓名:俞超栋学生学号:09061821实验一、一阶单容上水箱对象特性测试实验.实验目的(1)熟悉单容水箱的数学模型及其阶跃响应曲线。
(2)根据由实际测得的单容水箱液位的阶跃响应曲线,用相关的方法分别确定它们的参数。
二.实验设备AE2000型过程控制实验装置,PC机,DCS控制系统与监控软件。
三、系统结构框图图1-1、单容水箱系统结构图四、实验原理阶跃响应测试法是系统在开环运行条件下,待系统稳定后,通过调节器或其他操作器,手动改变对象的输入信号(阶跃信号),同时记录对象的输出数据或阶跃响应曲线。
然后根据已给定对象模型的结构形式,对实验数据进行处理,确定模型中各参数。
图解法是确定模型参数的一种实用方法。
不同的模型结构,有不同的图解方法。
单容水箱对象模型用一阶加时滞环节来近似描述时,常可用两点法直接求取对象参数。
如图1-1所示,设水箱的进水量为Q,出水量为Q,水箱的液面高度为h,出水阀V2固定于某一开度值。
根据物料动态平衡的关系,求得:dzihR *C* —— +Ah-R * AQ.d t在零初始条件下,对上式求拉氏变换,得:单容水箱如图1-1所示:H(S) - ^2 G"硕Rys 十]K卩S式中,T为水箱的时间常数(注意:阀V2的开度大小会影响到水箱的时间常数) ,T=R2*C, K=F2为单容对象的放大倍数,R i、R2分别为V V2阀的液阻,C为水箱的容量系数。
令输入流量Q的阶跃变化量为民,其拉氏变换式为Q( S)=F O/S,F O为常量,则输出液位高度的拉氏变换式为:打KRo KR L KR L,H⑸一S(TS+1)=飞一一审斤当t=T时,则有:-1h(T)=KR o(1-e )=O.632KR o=O.632h( )即h(t)=KR o(1-e -t/T)当t —>g时,h (^) =KF0,因而有K=h (^) /R0=输出稳态值/阶跃输入式(1-2 )表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图1-2所示。
杭电自控实验报告
自动控制原理实验报告班级:12063012姓名:成思屹学号:3.1典型环节的模拟研究3.1.1典型环节的模拟研究一、实验目的1.了解和掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式。
2.观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响。
(1)观察比例环节的阶跃响应曲线R0 R1 输入Ui比例系数K计算值测量值200K 100K 4V 0.5 200K 4V 150K 100K 2V 2 200K 1V 4截图依次如下:(2)观察惯性环节的阶跃响应曲线R0 R1 C 输入Ui比例系数K 惯性常数K 计算值测量值计算值测量值200K 200K 1U4V1 0.2 2U 1 0.450K 100K1U2V 2 0.1 200K 1V 4 0.2截图依次如下:(3)观察积分环节的阶跃响应曲线 R0 C输入Ui 积分常数Ti 计算值 测量值200K 1U1U 2U100K 1U2U截图依次如下:(4)观察比例积分环节的阶跃响应曲线R0 R1 C 输入Ui比例系数K 积分常数Ti计算值测量值计算值测量值200K200K1U1V12U 1100K1U 22U 2截图依次如下:3.1.2二阶系统瞬态响应和稳定性一、实验目的1.了解和掌握典型二阶系统模拟电路的构成方法及I型二阶闭环系统的传递函数标准式。
2.研究I型二阶闭环系统的结构参数——无阻尼振荡频率,阻尼比对过渡过程的影响。
3.掌握欠阻尼I型二阶闭环系统在阶跃信号输入时的动态性能指标MP,TP,TS的计算。
4.观察和分析I型二阶闭环系统在欠阻尼,临界阻尼,过阻尼的瞬态响应曲线,及在阶跃信号输入时的动态性能指标MP,TP值,并与理论计算值做对比。
(1)计算和观察被测对象的临界阻尼的增益K,填入实验报告(2)画出阶跃响应曲线,测量超调量Mp,峰值时间tp填入实验报告截图如下:第一张为T=0.1时,Mp的计算;第二张为T=0.1时,tp 计算;第三张为T=0.3时,Mp的计算;第四张为T=0.3时,tp 计算。
控制系统仿真实验_new_2013(DOC)
控制系统仿真实验利用MATLAB进行时域频域分析实验一、实验目的:1. 掌握利用MATLAB进行简单数值计算的方法2. 学会利用MATLAB分析时间响应3. 学会利用MATLAB分析频率特性二、实验设备:安装有MATLAB6.1的微型计算机三、实验内容第一部分Matlab环境熟悉§1-1MATLAB的工作窗口一、命令窗口workspace 命令历史启动MATLAB之后,屏幕上自动出现命令窗口,它是MATLAB提供给用户的操作界面,用户可以在命令窗口内提示符“>>”之后键入MATLAB命令,回车即获得该命令的答案。
命令窗口中的File、Edit、View、Window、Help等菜单条与WINDOWS系统相同。
二、M文件编辑窗口M文件是MATLAB语言所特有的文件。
用户可以在M 文件编辑窗口内,编写一段程序,调试,运行并存盘,所保存的用户程序即是用户自己的M文件。
MATLAB工具箱中大量的应用程序也是以M文件的形式出现的,这些M文件可以打开来阅读,甚至修改,但应注意,不可改动工具箱中的M 文件!1.进入M文件窗口有两种方法命令窗口—File —New —M-File;命令窗口—点击“File”字样下面的图标。
M文件编辑窗口的标记是“Untitled”(无标题的)。
当用户编写的程序要存盘时应当自己命名。
若用户不自己命名,则MATLAB会对Untitled进行编号。
2.M文件的执行:返回命令窗口,在当前目录(Current Directory)内选择所要运行的M文件的目录,在命令窗口提示符“>>”后,直接键入文件名(不加后缀)即可运行。
注意:(1)机器默认路径为一级子目录MATLAB6p1\work;三、在线帮助窗口在命令窗口中键入Help(空格) 函数名,可以立即获得该函数的使用方法。
§1-2 MATLAB最基本的矩阵操作作为命令窗口及M文件编辑器的应用实例,介绍几个最基本的矩阵运算命令。
控制系统仿真设计.doc

课程设计任务书课程设计题目控制系统仿真设计功能使得电动车控制系统的系统在校订后技术指标阶跃响应的超调量小于5%,调理时间小于 4s。
工作量二周第一周学习怎样使用 MATLAB 软件与控制系统的仿真等,第二周选择课题而后进行分组查工作计划询资料,最后借助软件对实验题目进行编程改正和剖析,使实验达到题目要求的最优化成效。
指导教师考语目录第 1 章设计题目及要求 (1)设计题目 (1)要求 (1)第 2章校订前系统性能 (2)时域性能 (2)频域性能 (5)第 3章校订环节设计 (6)校订方法选择 (6)控制参数整定 (6)第 4章校订后系统性能 (7)时域性能 (7)频域性能 (9)结论 (10)心得领会 (11)第 1 章设计题目及要求1.1 设计题目:若系统的数学模型及控制环节的传达函数为G(s)=40 /((ss+3)( s+6)),设计校订装置。
电动车控制系统:某电动车控制系统如图:1.2 要求:系统在阶跃响应的超调量小于5%,调理时间小于4s。
第 2 章校订前系统性能2.1 时域性能(1)、绘制未加入校订装置的系统开环阶跃响应曲线,依据系统的开环传达函数,程序以下:function [Tp,Mp,Tr,Ts]=stepa(G)[Y,t] = step(G);cs=length(t);yss=Y(cs);[ctp,tp]=max(Y);Tp=t(tp);Mp=100*(ctp-yss)/yssk=cs+1;n=0;while n==0k=k-1;if Y(k)<0.98*yssn=1;endendt1=t(k);k=cs+1;n=0;while n==0k=k-1;if Y(k)>1.02*yssn=1;endendt2=t(k);if t1>t2Ts=t1;elseTs=t2;Endclear all;clear all;num=2.2;den=conv([1,0],conv([0.3,1],[0.17,1])); sys1=tf(num,den);sys2=feedback(sys1,1);figure(1);margin(sys1)figure(2);step(sys2)[Tp,Mp,Tr,Ts]=stepa(sys2)Mp =Tp =Mp =Tr =Ts =Step Response1edtui lpmA0123456Time (sec)系统的阶跃响应曲线图 2-12.2 频域性能由 2.1 节的程序能够获取系统的频域曲线图(2-2)以下所示)B d (e dtu i n g a M) g e d ( e s a h PBode DiagramGm = 12.4 dB (at 4.43 rad/sec) , P m = 43.8 deg (at 1.84 rad/sec)50-50-100-150-90-135-180-225-270-10123 1010101010Frequency (rad/sec)控制系统的频域响应曲线图 2-2MATLAB运转结果开环传达函数为:G(s)=2.2 /( s(0.3s +1)( 0.17s+1))系统是稳固的,可是响应时间和超调量都较之题目要求大第 3 章校订环节设计3.1 校订方法选择因为题目要求系统阶跃响应的超调量小于 5%,超调时间小于4s ,系统固然稳固,可是响应时间较快和超调量较大,因为放大系数 K 对超调量有影响,为此需要改变放大系数 K 的值来知足题目要求的预期值,依据系统的时域性能和频域性能可知合适采用比率- 微分控制器( PD 控制器)从比率环节和微分环节进行校正,从物理的角度来剖析,他能够降低系统的最大超调量,改变动向性能,从频次特征的角度来说,它能够增添系统的相角裕量,是系统的震荡减弱。
杭电自动化单片机实验报告

杭电自动化单片机实验报告单片机原理与应用及 C51程序设计实验报告实验名称:单片机技术实验实验一继电器控制输出实验一、实验目的1.掌握STC12C5A16S2单片机的最基本电路的设计;2.了解单片机I/O端口的使用方法;3.了解继电器和蜂鸣器控制电路以及小电压控制大电压的方法。
二、实验要求1.利用STC12C5A16S2单片机的P1.2、P1.3口作按钮S9和S10输入,P1.0和P1.1口作开关量输出,并分别控制一个5V的继电器和蜂鸣器。
2.当S9闭合时,P1.0控制继电器闭合并控制灯泡闪亮;当S9断开时,继电器触电断开,灯泡不亮;3.当S10闭合时,P1.1控制蜂鸣器闭合并发出声音;当S10断开时,蜂鸣器不响。
三、电路四、原理说明Q1、Q2为9012三极管即PNP型,低电平导通,当S9或S10按下时,相应的IO口拉低,当P1.0或P1.1赋0时即可控制继电器的吸合活着蜂鸣器的发声。
五、程序代码#includesbit L1=P1^1;sbit L2=P1^2;sbit L3=P1^3;sbit L0=P1^0;//定义位变量void delay(){int i,j;for(i=0;i<250;i++)for(j=0;j<250;j++);//利用系统时钟,定义延时函数}void main (){int n=20;while(1) //不断循环检测{if(L2==0) //判断S9输入{while(n--){L0=0;delay();L0=1;delay(); //灯泡以2*delay为周期闪亮}n=20;}if(L3==0) //判断S10闭合{while(n--){L1=0;delay();delay(); //蜂鸣器以2*delay为周期发声}n=20;}}}实验二 LED轮换点亮实验一、实验目的1.掌握STC12C5A16S2单片机的I/O电路设计;2.学习SN74HC573数据锁存输出方法。
杭电自动化专业计算机控制系统实验报告

实验一、常规PID控制算法仿真仿真框图如下实验参数:shiyanpid Ts=0.1s,b为班号1~5,x为学号后2位,1~45实验要求:(1)画Simulinnk框图(2)设计或凑试PID三个参数,进行仿真(3)使稳态误差为0,且动态性能较满意仿真框图:实验分析:b=1,x=15。
比例系数Kp增大时系统动作灵敏,响应速度加快,过大会使振荡次数增加,系统趋向不稳定,这里取120。
积分环节可以消除稳态误差,Ti减小,系统振荡次数增加,这里取Ki为150。
微分环节可以改善系统动态性能,减小超调和调节时间,这里取Kd为10。
系统在2秒内达到稳态。
实验二、积分分离PID控制算法仿真实验参数:shiyanpidjffl Ts=0.1s,b为班号1~5,x为学号后2位,1~45实验要求:(1)画Simulinnk框图(2)使稳态误差为0,且动态性能较满意(3)尝试不同的积分分离的阈值(比如ε=0,0.1,0.2,……,0.9,1),观察阶跃响应,并确定最佳的阈值实验框图:翻译后Switch模块的说明:如果2输入满足规则,则1通道通过,否则3输入通过。
输入被标号。
1输入通过规则是输入2(偏差e)大于或等于阀值。
第一三输入为数据输入,第二输入为控制输入。
原理:|e(k)|<=ε,ki起作用|e(k)|>ε,ki不起作用,由于阶跃输入,(treshhold )ε=0.1,0.2,……,0.9,1。
由于参数原因去kp=50,ki=kd=0时,曲线最好为了体现ε的作用,积分值不取0,改为Ki=10取不同ε后的曲线ε=0.1ε=0.5ε=1分析:ε=0.1时曲线最好,ε过大起不到积分分离的作用,比如ε=1,总会存在积分作用,ε过小可能是控制不能跳出积分分离的区域,从而只存在PD作用,长时间存在静差。
实验三、不完全微分PID控制算法仿真1、不完全微分PID控制器的阶跃响应实验参数:Shiyanpidbwqwfstep Ts=0.1s,仿真时间设为10s,5s,3s P=1 I=1 D=1滤波器参数a=0.1,0.2,……,0.8,1.2,实验框图:框图1:积分输出:微分输出:可见微分只在第一个单位时间有相应,而且较大框图2:a=0.1时a=0.5时:a=1时:分析:引入惯性环节后,对微分环节对阶跃响应有明显的改善作用。
杭电过程控制实验报告
过程控制实验报告班级:组号:组员:年月日实验一、水箱液位定值控制实验一、实验目的1、通过实验熟悉单回路反馈控制系统的组成和工作原理。
2、分析分别用P、PI和PID调节时的过程图形曲线。
3、定性地研究P、PI和PID调节器的参数对系统性能的影响。
二、面板位图与实验电气连接图1、实验面板位图实验面板位图如图1-1,图1-2,图1-3所示图1-1、传感器执行器位图图1-2、电源面板位图2、实验电气接线图3、实验信号实物连接图图1-5、实验信号实物连接图三、实验原理图1-6、实验控制框图1-6为单回路水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
因此当一个单回路控制系统组成好以后,如何整定好控制器的参数是一个很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
四、实验内容和步骤1、系统连线(1)将系统的所有电源开关打在关的位置。
(2)按照实验电气图将系统接好2、仪表操作按照实验手册设置相应参数:主要包括Inp 33;SCL 0 ; SCH 650.03、启动实验装置4、实验内容(一)比例调节(P)控制(1)启动计算机MCGS软件,进入实验系统选择水箱液位定值控制实验(2)按下水泵1启动按钮,启动水泵1,进行实验。
(3)设定给定值30,设置P(20)参数,将I(9999)参数设置为最大值,D参数设置为0,观察屏幕上的曲线,待被调参数基本稳定于给定值后,可以开始加干扰实验。
控制系统仿真与设计实验报告.doc
控制系统仿真与设计实验报告。
控制系统仿真与设计实验报告姓氏:班级级别:号码:讲师:刘枫7.2.2控制系统的阶跃响应1.实验目的1。
观察学习控制系统的单位阶跃响应;2.记录单位阶跃响应曲线;3.掌握时间的一般方法;二、实验内容1。
二阶系统G(s)=10/(S2·2s 10)键入程序,观察并记录阶跃响应曲线;记录系统的闭环根、阻尼比和无阻尼振荡频率;记录实际测量的峰值、峰值时间和过渡时间,并与理论值进行比较。
(1)实验步骤如下:num=[10];den=[1 2 10];步骤(num,den);响应曲线如下图所示:(2)再次键入:潮湿(穴);步骤(num,den);[y x t]=步(数字,den);[y,t']实验结果如下:记录实际测量的峰值、峰值时间和过渡时间,并将实际值与理论计算值进行比较。
理论值峰值为 1.34731.2975,峰值时间为1.09281.0649,过渡时间为48362.6352 #,47713.51362二阶系统G(s)=10/(s2 2s 10)的试验程序如下:num 0=[10];den0=[1 2 10];步骤(num0,den0);坚持住。
num 1=[10];den1=[1 6.32 10];步骤(num1,den1);坚持住。
num 2=[10];den2=[1 12.64 10];步骤(num2,den2);响应曲线:(2)修改参数实现wn1=(1/2)wn0和wn1=2wn0响应曲线测试程序: num0=[10];den0=[1 2 10];步骤(num0,den0);坚持住。
num 1=[2.5];den1=[1 1 2.5];步骤(num1,den1);坚持住。
num 2=[40];den2=[1 4 40];步骤(num2,den2);响应曲线如下图所示:3.对后续系统进行阶跃响应,并与原系统的响应曲线进行比较,得出相应的实验分析结果。
控制系统仿真实验报告
控制系统仿真实验报告一、实验目的本次控制系统仿真实验的主要目的是通过使用仿真软件对控制系统进行建模、分析和设计,深入理解控制系统的工作原理和性能特点,掌握控制系统的分析和设计方法,提高解决实际控制问题的能力。
二、实验设备与软件1、计算机一台2、 MATLAB 仿真软件三、实验原理控制系统是由控制对象、控制器和反馈环节组成的一个闭环系统。
其工作原理是通过传感器测量控制对象的输出,将其与期望的输出进行比较,得到误差信号,控制器根据误差信号产生控制信号,驱动控制对象,使系统的输出逐渐接近期望的输出。
在仿真实验中,我们使用数学模型来描述控制对象和控制器的动态特性。
常见的数学模型包括传递函数、状态空间方程等。
通过对这些数学模型进行数值求解,可以得到系统的输出响应,从而对系统的性能进行分析和评估。
四、实验内容1、一阶系统的仿真建立一阶系统的数学模型,如一阶惯性环节。
使用 MATLAB 绘制系统的单位阶跃响应曲线,分析系统的响应时间和稳态误差。
2、二阶系统的仿真建立二阶系统的数学模型,如典型的二阶振荡环节。
改变系统的阻尼比和自然频率,观察系统的阶跃响应曲线,分析系统的稳定性、超调量和调节时间。
3、控制器的设计与仿真设计比例控制器(P 控制器)、比例积分控制器(PI 控制器)和比例积分微分控制器(PID 控制器)。
对给定的控制系统,分别使用不同的控制器进行仿真,比较系统的性能指标,如稳态误差、响应速度等。
4、复杂控制系统的仿真建立包含多个环节的复杂控制系统模型,如串级控制系统、前馈控制系统等。
分析系统在不同输入信号下的响应,评估系统的控制效果。
五、实验步骤1、打开 MATLAB 软件,新建脚本文件。
2、根据实验内容,定义系统的数学模型和参数。
3、使用 MATLAB 中的函数,如 step()函数绘制系统的阶跃响应曲线。
4、对响应曲线进行分析,计算系统的性能指标,如超调量、调节时间、稳态误差等。
5、设计控制器,修改系统模型,重新进行仿真,比较系统性能的改善情况。
电力系统及其自动化实验报告-仿真

电力系统及其自动化实验报告4一、实验目的通过建立仿真模型,对统一潮流控制器(Unified Power Flow Controller,UPFC)作静止同步串联补偿器SSSC运行时对输电线路进行阻抗补偿的功能的验证。
二、实验原理—UPFC串联变换器作SSSC运行的控制策略UPFC的串联变流器可以补偿线路阻抗,增加输电线路的传输容量,这时的串联变流器就是作为SSSC运行的。
当串联变流器作为SSSC运行时,其补偿的阻抗可以是容性阻抗,也可以感性阻抗。
其基本原理是:首先通过锁相环获得输电线路电流的相角,将其作为PARK变换的初相角。
然后对串联变流器注入输电线路电压的d轴分量以及q轴分量进行控制。
其中电压的d轴分量用来平衡串联变流器自身的有功损耗,q轴分量来补偿线路阻抗。
由串联变流器做SSSC运行的原理我们可以得到其控制框图,如图1所示。
U图1UPFC串联变流器做SSSC运行的控制框图PI调节器输出信号产生电压d轴分量的指令信号,线路电流q轴分量与补偿线路阻抗指令值*X相乘得到q轴分量的指令信号。
c三、实验内容建立UPFCC串联变流器做SSSC的仿真模型并进行参数设定,对UPFC作SSSC运行时对输电线路进行阻抗补偿的功能的验证。
1.UPFC主电路模型的建立由UPFC的结构图可知,UPFC的装置的主电路是由两个共用直流电容的电压源型变流器组成的,并且二者通地两个变压器分别并联、串联接入系统。
shuntIn2Conn 2Conn 3Conn 5Conn 1Conn 4seriesIn1Conn 1Conn 2Conn 4Conn 5Conn 7Conn 8Conn 3Conn 6R=2 Ohm L=25mHA B CA B C R=0.2 Ohm L=2mHA BCA B CCBr VBr _abc & I Br_abcA B C a bc B2 VB 2_abcA B C a b c B1 VB 1_abcA B C a b c 220V/50Hz/15degreeNA B C220V/50Hz/0degree NA BC PWM2PWM 11图2 UPFC 在系统仿真主电路模型由图2可以知道,该模型是由主电路、测量模块、控制电路以及线路连接组成。
控制系统仿真实验报告
哈尔滨理工大学实验报告控制系统仿真专业: 自动化12-1学号: 1230130101姓名:一.分析系统性能一.实验目的及内容:1、熟悉MATLAB软件的操作过程;2、熟悉闭环系统稳定性的判断方法;3、熟悉闭环系统阶跃响应性能指标的求取。
二.实验用设备仪器及材料:PC, Matlab 软件平台三、实验步骤1、编写MATLAB程序代码;2、在MATLAT中输入程序代码,运行程序;3、分析结果。
四.实验结果分析:1、程序截图得到阶跃响应曲线得到响应指标截图如下2、求取零极点程序截图得到零极点分布图3、分析系统稳定性根据稳定的充分必要条件判别线性系统的稳定性最简单的方法就是求出系统所有极点,并观察就是否含有实部大于0的极点,如果有系统不稳定。
有零极点分布图可知系统稳定。
二.单容过程的阶跃响应一、实验目的1、熟悉MATLAB软件的操作过程2、了解自衡单容过程的阶跃响应过程3、得出自衡单容过程的单位阶跃响应曲线二、实验内容已知两个单容过程的模型分别为1()0.5G ss=与51()51sG s es-=+,试在Simulink中建立模型,并求单位阶跃响应曲线。
三、实验步骤1、在Simulink中建立模型,得出实验原理图。
2、运行模型后,双击Scope,得到的单位阶跃响应曲线。
四、实验结果1.建立系统Simulink仿真模型图,其仿真模型为2.过程阶跃响应曲线为三.单容过程的阶跃响应一、实验目的1、 了解比例积分调节的作用;2、 了解积分调节强弱对系统性能的影响。
二、实验内容已知控制系统如下图所示,其中01()(1)(21)(51)G s s s s =+++,H(s)为单位反馈,且在第二个与第三个环节(即1(21)s +与1(51)s +)之间有累加的扰动输入(在5秒时幅值为0、2的阶跃扰动)。
对系统采用比例积分控制,比例系数为2p K =,积分时间常数分别取3,6,12i T =,试利用Simulink 求各参数下系统的单位阶跃响应曲线与扰动响应曲线。
杭州电子科技大学计算机控制系统实验报告
实验时间:2016年6月杭州电子科技大学自动化学院实验报告课程名称:计算机控制系统实验名称:计算机控制系统实验指导教师:xxx学生姓名:xxx学生学号:xxx实验一:常规PID控制算法仿真Simulink框图班级:4,学号28;如图所示得到的稳态误差为0,动态性能非常好实验分析:由于后面的传递函数的原因,在调节PID参数时应当用用较大倍数来调试,并且增大示波器的显示时间长度,然后再来调节。
因为第一个实验较为简单,慢慢掌握PID参数调节经验就可以实验二:积分分离PID控制算法仿真Simulink框图示波器图像:P=5 I=25 D=0.1实验分析:在阈值为1的时候调节出来的图像较为满意,如图所示,曲线响应快速,在1s内就达到了稳态值,且稳定。
实验三:1、不完全微分PID控制器的阶跃响应Simulink框图Scope2结合了滤波前和滤波后的图像,如图所示:参数调节后的图像,P=2.3 I=3 D=1.5结果分析:很明显加入滤波后,图像明显缓和。
经过PID参数调试后,结果图像在1s时达到稳态值,并保持稳定,动态性能极好。
2,具有不完全微分PID控制器的系统的阶跃响应Simulink框图PID参数调节后的图像:P=6 I=0 D=0.5实验分析:虽然图像看起来不那么完美,但是实际上是不错的,大概在4s 的时候达到稳态值并保持稳定,没有超调实验四:模糊控制系统仿真Fuzzy设计图像:Simulink框图:得到的示波器显示图:实验分析:经过调解后的图形在稳定前略有振荡,尝试过其他参数,但是D参数那里只能设置为0,不然就会卡住。
为了让其达到稳态值,并稳定只能加大参数,不免会出现略微的振荡。
但是这个调节大概在5s就到了稳态,所以还是比较理想的。
实验五:洗衣机模糊控制仿真matlab练习Fuzzy rules:输入【14 ,28】得出洗涤时间18.4该实验主要是了解模糊控制器的设计步骤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统仿真课程设计(2010级)题目控制系统仿真课程设计学院自动化专业自动化班级10062813学号10061314学生姓名陆维俊指导教师王永忠/刘伟峰完成日期2013年7月6日控制系统仿真课程设计(一)——锅炉汽包水位三冲量控制系统仿真1.1 设计目的本课程设计的目的是通过对锅炉水位控制系统的Matlab仿真,掌握过程控制系统设计及仿真的一般方法,深入了解反馈控制、前馈-反馈控制、前馈-串级控制系统的性能及优缺点,实验分析控制系统参数与系统调节性能之间的关系,掌握过程控制系统参数整定的方法。
1.2 设计原理锅炉汽包水位控制的操作变量是给水流量,目的是使汽包水位维持在给定的范围内。
汽包液位过高会影响汽水分离效果,使蒸汽带水过多,若用此蒸汽推动汽轮机,会使汽轮机的喷嘴、叶片结垢,严重时可能使汽轮机发生水冲击而损坏叶片。
汽包液位过低,水循环就会被破坏,引起水冷壁管的破裂,严重时会造成干锅,甚至爆炸。
常见的锅炉汽水系统如图1所示,锅炉汽包水位受汽包中储水量及水位下汽包容积的影响,而水位下汽包容积与蒸汽负荷、蒸汽压力、炉膛热负荷等有关。
影响水位变化的因素主要是锅炉蒸发量(蒸汽流量)和给水流量,锅炉汽包水位控制就是通过调节给水量,使得汽包水位在蒸汽负荷及给水流量变化的情况下能够达到稳定状态。
锅炉汽水系统图在给水流量及蒸汽负荷发生变化时,锅炉汽包水位会发生相应的变化,其分别对应的传递函数如下所示:(1)汽包水位在给水流量作用下的动态特性汽包和给水可以看做单容无自衡对象,当给水增加时,一方面会使得汽包水位升高,另一方面由于给水温度比汽包内饱和水的温度低,又会使得汽包中气泡减少,导致水位降低,两方面的因素结合,在加上给水系统中省煤器等设备带来延迟,使得汽包水位的变化具有一定的滞后。
因此,汽包水位在给水流量作用下,近似于一个积分环节和惯性环节相串联的无自衡系统,系统特性可以表示为 ()111()()(1)K H S G S W S s T s ==+ (2)汽包水位在蒸汽流量扰动下的动态特性在给水流量及炉膛热负荷不变的情况下,当蒸汽流量突然增加时,瞬间会导致汽包压力的降低,使得汽包内水的沸腾突然加剧,水中气泡迅速增加,将整个水位抬高;而当蒸汽流量突然减小时,汽包内压力会瞬间增加,使得水面下汽包的容积变小,出现水位先下降后上升的现象,上述现象称为“虚假水位”。
虚假水位在大中型中高压锅炉中比较显著,会严重影响锅炉的安全运行。
“虚假水位”现象属于反向特性,变化速度很快,变化幅值与蒸汽量扰动大小成正比,也与压力变化速度成正比,系统特性可以表示为 222()()()1f K K H s G s D s T s s==-+ 常用的锅炉水位控制方法有:单冲量控制、双冲量控制及三冲量控制。
单冲量方法仅是根据汽包水位来控制进水量,显然无法克服“虚假水位”的影响。
而双冲量是将蒸汽流量作为前馈量用于汽包水位的调节,构成前馈-反馈符合控制系统,可以克服“虚假水位”影响。
但双冲量控制系统要求调节阀具有好的线性特性,并且不能迅速消除给水压力等扰动的影响。
为此,可将给水流量信号引入,构成三冲量调节系统,如图2所示。
图中LC 表示水位控制器(主回路),FC 表示给水流量控制器(副回路),二者构成一个串级调节系统,在实现锅炉水位控制的同时,可以快速消除给水系统扰动影响;而蒸汽流量作为前馈量用于消除“虚假水位”的影响。
图2.2 三冲量调节系统图锅炉水位的三冲量调节系统是一种前馈-串级符合调节系统,调节系统框图如图3所示,其中G3为给水系统传递函数,a1、a2、a3分别为汽包液位传感器、给水流量传感器及蒸汽流量传感器转换系数。
图2.3 三冲量调节系统框图在仿真实验中,以200t/H 蒸汽锅炉汽包水位控制为例,参数设置如下:K1=0.037,T1=30,K2=3.6,T2=15,Kf=0.037,G3=20 ,a1=0.033,a2=a3=0.0173。
1.3 设计内容1.掌握汽包水位的单冲量、双冲量及三冲量控制的原理及优缺点;单冲量:以汽包水位为唯一控制信号,它是典型的单回路调节系统。
它结构简单,适用于小型锅炉 ,但无法克服假水位现象。
双冲量:被调参数水位的信号,从系统输出端返回到输入端,构成了反馈回路蒸汽流量的引入是使调节阀按此干扰量进行补偿校正,是前馈作用,而其他方面的干扰由反馈回路克服。
它克服了假水位现象;但调节阀的工作特性不一定能成为线性特性,要做到静态补偿比较困难,而且对于给水系统的干扰仍旧不能克服。
三冲量:引入给水流量信号,水位是主信号,蒸汽,给水为辅助冲量,这种方案是前馈-串级复合调节系统。
它适合于汽包水位要求严格或变化频繁、虚假水位严重的系统;在拥有双冲量调节优点的同时可以克服给水系统的干扰;但系统的结构相对比较复杂;对于参数的整定比较复杂;2.利用Matlab 实现汽包水位的三冲量控制仿真;3.完成对锅炉水位三冲量控制系统的参数整定,要求超调小、调节时间短,对扰动的抑制效果好;主回路PID参数设置如下:副回路PID参数设置如下:4.分析:(1)蒸汽扰动下的汽包水位动态特性;(2)不同扰动下系统的调节性能:a.蒸汽流量发生扰动时的调节性能;b.给水压力(流量)发生扰动时的调节性能。
画出Matlab仿真曲线,给出调节系统的暂态及稳态性能。
如图所示,t=550s时加入给水流量25%内扰,在1200s时加入水位25%干扰,1600s加入蒸汽流量25%外扰。
效果显示,以上三冲量控制方法和相应参数能得到较好的效果,初始时刻调整时间明显短于单回路情况下的500s,同时震荡次数也控制在可以接受的范围之内;针对三类干扰,效果都让人满意。
1.4 设计问题回答1. 根据单冲量调节系统原理,说明单冲量调节系统不能克服“虚假水位”影响;答:当蒸汽负荷突然大幅度增加时,由于假水位现象,调节器不但不能开大给水阀来增加给水量,以维持锅炉的物料平衡,却去关小调节阀的开度,减少给水量。
等到假水位消失后,由于蒸汽量的增加,送入水量反而减少,将使水位严重下降,波动很厉害,严重时甚至会使汽包水位降到危险程度,以致发生事故。
因此,对于停留时间短,负荷变动较大的情况,这样的系统不能适应,水位不能保证。
2. 在锅炉水位三冲量调节系统中,前馈、主回路、副回路分别起什么作用;答:前馈主要克服蒸汽负荷的干扰,副回路主要克服给水流量的干扰,主回路主要克服其它方面的干扰。
3.请说明主、副回路参数整定的方法;答:用衰减曲线法,具体如下:1.副调节器:副参数的设置是为了保证主参数的控制质量,允许在一定范围内变化,允许有余差,因此副调节器只要选P控制规律就可以了,设置Proportional为一个合理的值;2. 主调节器:主参数是工艺操作的主要指标,允许波动的范围很小,一般要求无余差,因此,主调节器应选PI或PID控制规律,在此从大到小调节Proportional的值,是的图像中波动的衰减比例为4,再通过衰减曲线法的整定公式获得参数。
4.若锅炉工况发生变化,如锅炉的热负荷发生改变时,是否需要重新整定控制系统参数,并说明什么样的系统适合用PID控制方法。
答:不需要。
当对象为高阶又有滞后特性时,控制要求高,则采用PID控制,并运用多种控制级联手段。
控制系统仿真课程设计(二)——异步电机调速仿真设计本课程设计的目的是通过对锅炉水位控制系统的Matlab 仿真,掌握过程控制系统设计及仿真的一般方法,深入了解反馈控制、前馈-反馈控制、前馈-串级控制系统的性能及优缺点,实验分析控制系统参数与系统调节性能之间的关系,掌握过程控制系统参数整定的方法。
2.1 设计内容熟悉异步电机动态方程和调速方法。
熟悉异步电机动态结构图。
异步电机动态动态性能仿真。
2.2 设计及Matlab 仿真过程1)熟悉异步电机动态方程(状态方程)αβ坐标系状态方程:其中,状态变量:输入变量: 电磁转矩: 2)绘制动态结构图2p m p s r s L r d ()d n L n i i T tJL J βααωψψβ=--r m r r s r rd 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ααβαψψωψ=--+22s s r r m m m s r r s s 2r r r rd d i R L R L L L L i u t L T L L ααβαασψωψ+=+-+22s s r r m m m s r r s s 2r r r rd d i R L R L L L L i u t L T L L ββαββσψωψ+=--+[ ]Ts s L U u u T αβ=()p m e s s s s r n LT i i L βααβψψ=-[ ]T r r s s X i i αβαβωψψ=其中,3/2 transform 子系统框图,2/3 transform 见下图:3)在simulink 仿真环境下建立异步电机动态仿真模型4)输入参数UA :UB :UC:TL: 系数输入:5)异步电机动态性能仿真分析。
W和Te图像如下:分析:1.动态:在空载启动大约0.4s内,为异步电机动态过程,转矩初始为0,启动转矩和启动电流很大,较大的启动转矩维持一段时间使电机转速快速提升至稳定值,未出现超调,动态时间大约持续0.4s。
2.稳定:0.4s之后异步电动机空载启动完成进入稳定运行阶段,由于电机负载为0,故最终转矩稳定在0左右,电机稳定运行。
3.加载:在2s加入给定扰动负载10后,再次进入动态过程,电流增大,动转矩(Te-TL<0)为负值,角加速度<0导致转速w m降低,同时电磁转矩Te不断增大,直至Te=TL时,减速过程结束,该动态过程大约持续0.2s的时间;0.2s后电机重新达到新的平衡状态,由于给定负载为10,故三相电流增大并维持在该值。
电流图和稳态电流图分别如下:三实践总结经过这两个星期的短学期,在之前的前期理论学习和一定的实验基础上,我对Matlab 在控制系统仿真方面有了新的认识。
之前的认识主要在于,传递函数在Matlab中的实现方法,是通过系统框图的各个部件组合实现;现今的认识在于,对于一个实际案例的实现,更多地在于系统框图的构建,在合理构建的基础上用Similink仿真,并且进行参数调整。
尤其是在三冲量控制系统的仿真当中,我将过程控制课程中的PID参数整定方法合理运用(此处主要运用衰减曲线法),得到了较为满意的PID参数。
在运动控制仿真中,我熟悉了如何构造某个对象的模型,并且把它封装成一个模型;过程中我还学会了如何导入数据:除了可以直接赋值、直接编写Matlab代码外,一般常用带入.m文件来导入数据。