关于发电机定、转子间气隙的计算方法简介
电气基础知识问答:80问
电气基础知识问答:80问1、电力系统产生工频过电压的原因主要有哪些?1)空载长线路的电容效应2)不对称短路引起的非故障相电压升高3)甩负荷引起的工频电压升高。
2、什么叫操作过电压?主要有哪些?操作过电压是由于电网内开关操作或故障跳闸引起的过电压。
主要包括:1)切除空载线路引起的过电压2)空载线路合闸时引起的过电压3)切除空载变压器引起的过电压4)间隙性电弧接地引起的过电压5)解合大环路引起的过电压。
3、电网中限制操作过电压的措施有哪些?电网中限制操作过电压的措施有:1)选用灭弧能力强的高压开关2)提高开关动作的同期性3)开关断口加装并联电阻4)采用性能良好的避雷器,如氧化锌避雷器5)使电网的中性点直接接地运行。
4、什么叫电力系统谐振过电压?分几种类型?电力系统中一些电感、电容元件在系统进行操作或发生故障时可形成各种振荡回路,在一定的能源作用下,会产生串联谐振现象,导致系统某些元件出现严重的过电压,这一现象叫电力系统谐振过电压。
谐振过电压分为以下几种:1)线性谐振过电压谐振回路由不带铁芯的电感元件(如输电线路的电感,变压器的漏感)或励磁特性接近线性的带铁芯的电感元件(如消弧线圈)和系统中的电容元件所组成。
2)铁磁谐振过电压谐振回路由带铁芯的电感元件(如空载变压器、电压互感器)和系统的电容元件组成。
因铁芯电感元件的饱和现象,使回路的电感参数是非线性的,这种含有非线性电感元件的回路在满足一定的谐振条件时,会产生铁磁谐振。
c)参数谐振过电压由电感参数作周期性变化的电感元件(如凸极发电机的同步电抗在Kd~Kq间周期变化)和系统电容元件(如空载线路)组成回路,当参数配合时,通过电感的周期性变化,不断向谐振系统输送能量,造成参数谐振过电压。
5、避雷线和避雷针的作用是什么?避雷器的作用是什么?避雷线和避雷针的作用是防止直击雷,使在它们保护范围内的电气设备(架空输电线路及变电站设备)遭直击雷绕击的几率减小。
避雷器的作用是通过并联放电间隙或非线性电阻的作用,对入侵流动波进行削幅,降低被保护设备所受过电压幅值。
汽轮发电机转子气隙取气通风试验

汽轮发电机转子气隙取气通风试验前言在汽轮发电机中,转子与定子之间有一定的气隙。
为了保证转子的正常运转,需要进行气隙取气通风试验,以确保气隙通风效果良好、不影响转子的发电效率和寿命。
本文将深入探讨汽轮发电机转子气隙取气通风试验的目的、方法、步骤和要注意的事项。
一、目的汽轮发电机转子气隙取气通风试验的目的是为了验证气隙通风系统的性能是否满足要求,并通过调整气隙通风系统的参数,以保证转子在运行过程中的散热和通风效果良好,不受过热的影响。
同时,通过试验结果分析,可以提供改进转子气隙通风系统的参考依据。
二、方法进行汽轮发电机转子气隙取气通风试验时,可以采用以下方法: 1. 确定试验条件:包括转子转速、负载条件等。
2. 设置试验参数:根据转子设计要求和实际工况,调整气隙通风系统的参数,如通风孔的数量和大小、通风风机的转速等。
3. 进行试验:在设定的试验条件下,启动发电机,记录转子的温度、震动等数据。
4. 分析试验结果:根据试验数据,分析转子的散热和通风效果,评估气隙通风系统的性能,并提出改进建议。
三、步骤进行汽轮发电机转子气隙取气通风试验时,可以按照以下步骤进行: 1. 设定试验条件:根据实际情况和要求,确定试验所需的转速、负载条件等。
2. 调整气隙通风系统参数:根据设定的试验条件,调整气隙通风系统的参数,如通风孔的数量和大小、通风风机的转速等。
3. 启动发电机:按照设定的试验条件,启动发电机,使之处于运行状态。
4. 记录数据:记录转子的温度、震动等关键数据,并及时记录到试验记录表中。
5. 分析数据:根据试验数据,分析转子的散热和通风情况,评估气隙通风系统的性能。
6. 结果评价:根据试验结果,评价气隙通风系统的性能是否满足要求,并提出改进建议。
四、注意事项在进行汽轮发电机转子气隙取气通风试验时,需要注意以下事项: 1. 安全措施:在试验过程中,要注意安全,确保试验人员和设备的安全。
2. 数据准确性:试验数据的准确性对于评估气隙通风系统的性能非常重要,要确保数据记录的准确性。
定子斜槽及非均匀气隙对永磁同步发电机的性能影响
电机 ( R ) F M 斜槽角度变化对定位转矩的影响 ;文献 【 探讨 了斜槽对无刷直 流电动机各次谐波转矩的影 5 】 响 ,确定 了一个最佳的斜槽角度 。但定子斜槽 、非均 匀气 隙对 永磁 同步发 电机 的性 能 有怎 样 的影响 还没有 看到相关的文献。本文利用 3维有 限元分析结合磁路 计算方法研究了斜槽 以及非均匀气隙对永磁同步发电 机空载电势 、短路 电流、输出功率、电机效率 、齿槽 转矩 、电势波形正弦畸变率等方面的影响 ,得出了一
a nt y cr n u hn(M M)s c s - de c i p t i ,h rc cicre to tu m g e sn ho o s cieP S ,u ha ola et c oe t lsot i ut urn, up t ma n o l r na r
p w re cec , o  ̄n r u , HD o d cdv l g eeclua da ieet k w w dh o e, f i y c g gt q e i n o f n u e ot ew r a l e t f rn e it i a c t d s
i v s i ae . i al , o t iyc n l so swe e o ti e . n e t td F n l s me u l o cu i n r b an g y i t d Ke wo d : s w d h n n u io m i g p h c n ’ p ro m n e e r n n g e y rs k e wi t ; o - n f r ar a ;t e ma h e S e f a c ;p ma e t m n t - i r a
电机气隙标准

电机气隙标准
电机气隙是指电机转子和定子之间的间隙,它对电机的性能和
效率有着重要的影响。
在电机制造和维护过程中,电机气隙的标准
是非常关键的。
本文将从电机气隙的定义、影响因素、标准要求等
方面进行详细介绍,以帮助大家更好地了解电机气隙标准。
首先,电机气隙的定义是什么呢?电机气隙是指电机转子和定
子之间的间隙,它的大小直接影响着电机的性能和效率。
合适的气
隙可以保证电机的正常运转,而过大或过小的气隙都会对电机的性
能造成影响。
其次,影响电机气隙的因素有哪些?首先是电机的设计和制造
工艺,这直接决定了电机气隙的大小和均匀性。
其次是电机的使用
环境,如温度、湿度等因素都会对气隙产生影响。
最后是电机的使
用状态,如长期运转、频繁启停等都会对气隙产生影响。
那么,根据以上因素,电机气隙的标准要求是怎样的呢?首先,气隙应该保持在设计要求的范围内,不能过大也不能过小。
其次,
气隙应该保持均匀,不能出现局部过大或过小的情况。
最后,气隙
应该能够适应不同的使用环境和状态,确保电机在各种条件下都能
正常运转。
总结一下,电机气隙标准是非常重要的,它直接关系着电机的性能和效率。
在电机的制造和维护过程中,我们都需要严格按照标准要求来进行操作,以确保电机的正常运转和长期稳定性能。
希望本文能够帮助大家更好地了解电机气隙标准,为电机的制造和维护提供一些参考和帮助。
同步机和异步机的气隙
同步机和异步机的气隙一、背景介绍同步机和异步机是电力系统中常见的电动机类型,它们都有一个重要的部件——气隙。
气隙是电动机转子和定子之间的间隙,它对电动机的性能和运行状态有着重要影响。
二、同步机气隙1. 同步机概述同步机是一种以交流电源为驱动力的旋转电动机,其转速与电源频率成正比。
它的气隙主要分为定子气隙和转子气隙。
2. 定子气隙定子气隙是指固定在同步发电机外壳上的不导电材料与定子铁芯之间的间距。
它对于同步发电机的性能有着重要影响,过小或过大都会影响到发电机的输出功率和效率。
3. 转子气隙转子气隙是指转子表面与定子表面之间的间距。
在同步发电机中,由于磁通旋转速度与转速相等,因此转子与定子必须保持一致,否则会引起磁场不稳定。
三、异步机气隙1. 异步机概述异步机是一种以交流电源为驱动力的旋转电动机,其转速与电源频率不成比例。
它的气隙主要分为定子气隙和转子气隙。
2. 定子气隙定子气隙是指固定在异步电动机外壳上的不导电材料与定子铁芯之间的间距。
它对于异步电动机的性能有着重要影响,过小或过大都会影响到电动机的输出功率和效率。
3. 转子气隙转子气隙是指转子表面与定子表面之间的间距。
在异步电动机中,由于磁通旋转速度与转速不相等,因此转子与定子之间必须存在一定的相对运动,否则无法产生感应电流。
四、同步机和异步机气隙比较1. 气隙大小同步机和异步机的气隙大小都会影响到电动机的性能和运行状态。
但是由于同步发电机需要保持同步,因此其气隙一般较小;而异步电动机则需要一定程度上的滑差才能产生感应电流,因此其气隙一般较大。
2. 气隙调整同步发电机一般需要定期调整气隙,以保证其性能和运行状态;而异步电动机一般不需要调整气隙,因为其气隙大小较大,且可以通过绝缘材料的厚度来调节。
3. 气隙对电动机性能的影响同步机和异步机的气隙大小都会影响到电动机的性能和运行状态。
过小或过大都会导致电动机输出功率下降、效率降低、噪音增加等问题。
五、结论同步机和异步机的气隙是电动机中一个重要的部件,它对于电动机的性能和运行状态有着重要影响。
直流发电机的工作原理及结构

直流发电机的工作原理及结构电机的可逆运行原理两个定理与两个定则1、电磁感应定理在磁场中运动的导体将会感应电势,若磁场、导体和导体的运动方向三者互相垂直,则作用导体中感应的电势大小为: e = B- l • v符号物理量单位B磁场的磁感应强度Wb/m2 v导体运动速度米/秒I导体有效长度me感应电势V电势的方向用右手定则2.电磁力定律载流导体在磁场中将会受到力的作用,若磁场与载流导体互相垂直(见下图),作用在导体上的电磁力大小为: f = B • I • i单位符号物理量Ai导体中的电流mI导体有效长度Nf电磁力力的方向用左手定则(一)直流发电机的工作原理1.直流发电机的原理模型图1 1 B 直猱友电机工作炽理2•发电机工作原理團直猱我电机工作原建a、直流电势产生用电动机拖动电枢使之逆时针方向恒速转动,线圈边a b和c d分别切割不同极性磁极下的磁力线,感应产生电动势直流发电机的工作原理就是把电枢线圈中感应产生的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势因为电刷A通过换向片所引出的电动势始终是切割N极磁力线的线圈边中的电动势。
所以电刷A始终有正极性,同样道理,电刷B始终有负极性。
所以电刷端能引出方向不变但大小变化的脉动电动势b、结论线圈内的感应电动势是一种交变电动势,而在电刷AB端的电动势却是直流电动势。
直流发电机[浏览次数:约145次]*直流发电机是一种把机械能转换为直流电输岀的电机,流电动机具有良好的起动性能和调速性能,因此广泛应用于要求调速平滑,调速范围广等对调速要求较高的电气传动系统中,如电力机车、无轨电车、轧钢机起重设备等。
目录*直流发电机的结构*直流发电机的部件功能・直流发电机的工作原理*直流发电机的额定值直流发电机的结构直流电机I區I的结构可分为静止和转动两部分,静止部分称为定子,旋转部分称为转子(也称电枢)图1与图2分别为直流电机的纵剖面示意图和横剖面示意图。
永磁同步发电机的工作原理
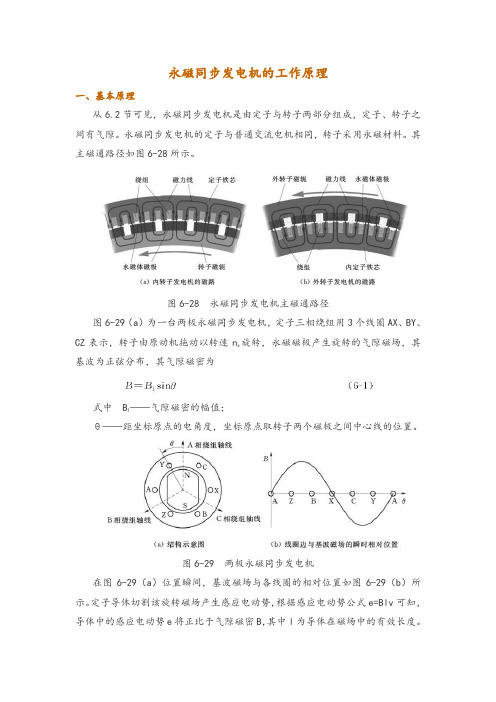
永磁同步发电机的工作原理一、基本原理从6.2节可见,永磁同步发电机是由定子与转子两部分组成,定子、转子之间有气隙。
永磁同步发电机的定子与普通交流电机相同,转子采用永磁材料。
其主磁通路径如图6-28所示。
图6-28 永磁同步发电机主磁通路径图6-29(a)为一台两极永磁同步发电机,定子三相绕组用3个线圈AX、BY、旋转,永磁磁极产生旋转的气隙磁场,其CZ表示,转子由原动机拖动以转速ns基波为正弦分布,其气隙磁密为——气隙磁密的幅值;式中B1θ——距坐标原点的电角度,坐标原点取转子两个磁极之间中心线的位置。
图6-29 两极永磁同步发电机在图6-29(a)位置瞬间,基波磁场与各线圈的相对位置如图6-29(b)所示。
定子导体切割该旋转磁场产生感应电动势,根据感应电动势公式e=Blv可知,导体中的感应电动势e将正比于气隙磁密B,其中l为导体在磁场中的有效长度。
基波磁场旋转时,磁场与导体间产生相对运动且在不同瞬间磁场以不同的气隙磁密B切割导体,在导体中感应出与磁密成正比的感应电动势。
设导体切割N极磁场时感应电动势为正,切割S极磁场时感应电动势为负,则导体内感应电动势是一个交流电动势。
对于A相绕组,线圈的两个导体边相互串联,其产生的感应电动势大小相等,方向相反,为一个线圈边内感应电动势的2倍(短距绕组需要乘短距系数,见第3章)。
将转子的转速用每秒钟内转过的电弧度ω表示,ω称为角频率。
在时间0~t内,主极磁场转过的电角度θ=ωt,则A相绕组的感应电动势瞬时值为——感应电动势的有效值。
式中E1三相对称情况下,B、C相绕组的感应电动势大小与A相相等,相位分别滞后于A相绕组的感应电动势120°和240°电角度,即可以看出,永磁磁场在三相对称绕组中产生三相对称感应电动势。
关于定子绕组中感应电动势的详细计算可参照第2章。
导体中感应电动势的频率与转子的转速和极对数有关。
若电机为两极电机,周,则导体中电动势交转子转1周,感应电动势交变1次,设转子每分钟转ns/60。
发电机工作原理

N
S
S
– 电流在时间上相差 120° 电角度
– 如同转子,定子产生一个旋转磁场,与电网频 率n =60 f / p 同步旋转
N S
N S
N 电流I
123
时间 t
定、转子合成磁场
? 定、转子磁场相互耦合形成了合成磁场
? 等效模型:
– 耦合磁体
– “齿轮
定子磁场
N
S
N
S
S
N
S
N
转子磁场
转矩的产生 – Maxwell 应力
? 转速和频率:
N
– 从定子侧看,磁 场的变化频率为 f
– 那么每分钟机械转速 n S
为
N
n ? 60 f p
S N
S
电压的产生
? 定子线圈
– 转子旋转时,从定子线圈 侧可以看到随时间变化的 磁场
– 感应电压(如图示的两个 线圈U1, U2 )的频率为:
f ? pn 60
n : 机械转速 (转/分钟) f : 电网频率 (Hz) p : 磁极对数
电动机运行
发电机运行
?水轮发电机工作原理 ?水轮发电机电磁设计 ?水轮发电机通风冷却 ?水轮发电机的运行
水轮发电机电磁设计
1. 额定容量:以视在功率SN(kVA )或有功功率PN(kW)表示; 2. 额定功率因数cos ? N: PN= SN?cos ? N ,QN= SN?sin ? N 一般发电机功率因数
目录
?水轮发电机工作原理 ?水轮发电机电磁设计 ?水轮发电机通风冷却 ?水轮发电机的运行
?定子线圈
ห้องสมุดไป่ตู้
水轮发电机工作原理
三相交流凸极同步电机
定子铁芯
伺服电机气隙磁密平均值
要得到伺服电机气隙磁密的平均值,可以采用以下步骤:
1. 在电机定子铁心上选取若干个测量点,并分别测量每个点的气隙磁感应强度B,记为B1、B2、B3...Bn。
2. 将每个测量点的气隙磁感应强度相加,再除以测量点的总数n,即可得到气隙磁感应强度B的平均值Bavg。
3. 在电机运行过程中,由于转子的旋转会引起气隙磁密的变化,因此需要对气隙磁密进行时间平均。
将电机在一定时间内的气隙磁密进行测量,并将测量结果相加,再除以测量次数,即可得到电机气隙磁密平均值。
这样就能计算出伺服电机气隙磁密的平均值,确保电机运行的安全和稳定。
发电机定转子气隙标准值

发电机定转子气隙标准值发电机的核心部分是转子和定子。
转子是由导磁体和导电体组成的部件,通过转子的旋转运动,将机械能转换为电能。
在转子和定子之间,需要保留一定的气隙,以确保转子的顺利旋转并避免磨损。
而定转子气隙标准值是指在设计和制造发电机时,需符合的规定的气隙大小。
发电机定转子气隙标准值的确定是非常重要的,因为气隙的大小直接影响到转速、效率和寿命等一系列关键指标。
合适的气隙可以确保转子的顺利旋转,并且能够降低电机内部的损耗。
不正确的气隙大小可能会导致转子和定子之间出现磨损和卡阻现象,从而影响机器的正常工作。
发电机定转子气隙标准值的确定通常遵循以下几个原则:根据发电机的类型和规格确定气隙标准值。
不同类型和规格的发电机,其转子和定子之间所需的气隙大小可能会有所不同。
小型发电机的气隙标准值通常较小,而大型发电机的气隙标准值较大。
根据发电机的工作条件和负载情况确定气隙标准值。
发电机在不同的工作条件和负载情况下,所需的气隙大小也会有所变化。
在高温环境下,由于材料膨胀,气隙标准值可能需要相应增大。
根据发电机的制造标准和技术要求确定气隙标准值。
不同的制造标准和技术要求对发电机的气隙大小有着明确的规定。
制造商需要根据相关标准和要求进行设计和制造,确保气隙在合理范围内。
发电机定转子气隙标准值的制定还需要考虑以下几个因素:材料的热膨胀系数:不同材料的热膨胀系数不同,需要根据转子和定子的材料选取合适的气隙标准值,以避免因温度变化而引起的气隙变化。
转子的尺寸和重量:转子的尺寸和重量也会对气隙的大小产生影响。
较大尺寸和重量的转子可能需要更大的气隙,以减小转子和定子之间的摩擦和磨损。
转速和振动:高速转动的转子对气隙的要求较高,以确保转子的顺利旋转和减小振动。
发电机定转子气隙标准值是根据发电机的类型、规格、工作条件、负载情况、制造标准和技术要求等因素来确定的。
合适的气隙标准值可以确保发电机的正常工作、提高效率和延长寿命。
在设计和制造发电机时,需要根据相关原则和要求来确定气隙的大小,以确保发电机的性能和可靠性。
TGS3601程序中发电机气隙磁势的计算和对转子电流计算的影响

式中:
ⅣP ——转子绕组 匝数
2 1 3 确定对 应 于保梯 电抗 的 内电势 E ..
E = ̄cs +( P s q ) P /o X +i  ̄ nN
D 嵋 tP  ̄ -
2 14 在 A A图 中 , 原 点 沿横 坐 标 轴量 取 ,。 .. S 从 , 向
,r
算对应 内电势 时的 。
有关 T S 6 1程 序 的设计 输 出数 据 : G 30
X P=0. 61 1 c s9=0. 5 o ̄ 8 sn  ̄=0. 2 iq 5 68
即 : , 。=,
一 l
, =4( ) 98 安
由于采 用 了计 算 的 空 载 饱 和 特 性 , 然 第 一 虽 点 的 电压很 低 , 是 毕 竟 在 定 、 子铁 心 内存 在 磁 但 转
21 1 空载 额定 定 子 电压对 应 的气 隙磁 势 , . . 即
T S6 1程序输 出的第一 个气 隙磁 势 A1 G 30 7 G
TA o P=2 ×KG × GA P×BG 3. 9 / 1
式中:
B ——气隙磁通密度 K ——气隙系数 。 G —— 气隙长度
2 12 对应 气 隙磁势 的转 子 电流 ..
上 海 大 中 型 电 机
T S6 1程 序 中发 电机 气 隙磁 势 的计 算 G 30 和对 转 子 电流计 算 的影 响
毛一忠 , 李立军
( 上海 电气 电站设备 有 限公 司上海 发 电机 厂 , 上海
摘
204 ) 020
要 :T S6 1 G 30 程序对发 电机气隙磁势的计算 , 采用 了两 种不 同的计算方法 , 1 根据气 隙磁通 密度 ()
船用发电机内部多物理场耦合数值分析

船用发电机内部多物理场耦合数值分析冯国增;姚寿广;刘飞;陈勇【摘要】本文采用多物理场耦合数值方法,对某船用发电机内部定子、转子的温度场以及内部冷却气道的流场、温度场进行数值模拟分析.基于建立的发电机整场耦合分析模型,得到了电机内部定子、转子温度分布及气隙流道内空气的流速分布、压力分布及温度场分布.计算结果表明:采用多物理场耦合数值方法,得到电机的流场与温度场计算结果更加准确,且通风管道内流体的流动情况更加清晰,为优化电机内部冷却气道提供了理论依据.【期刊名称】《舰船科学技术》【年(卷),期】2018(040)010【总页数】5页(P109-113)【关键词】船用发电机;流场;温度场;耦合分析【作者】冯国增;姚寿广;刘飞;陈勇【作者单位】江苏科技大学能源与动力学院,江苏镇江 212003;江苏科技大学能源与动力学院,江苏镇江 212003;江苏科技大学能源与动力学院,江苏镇江 212003;江苏科技大学能源与动力学院,江苏镇江 212003【正文语种】中文【中图分类】TM310 引言随着市场对电机单机容量需求的增大,电机运行过程中的损耗也随之提升,致使电机运行时的温升也不断升高,因此针对电机散热问题的研究至关重要[1]。
电机定子、转子内部通风沟的存在对电机的散热起着关键性的作用,由于电机结构的复杂性,在过往的研究中,通常将冷却介质流过流道对电机运行过程中温度场的影响转化成散热系数[2–4],并在电机温度场的计算过程中作为边界条件,且认为冷却介质在流道内温度与速度呈线性变化[5]。
再者由于电机定转子之间气隙内流体复杂的流动情况,多是把电机转子与定子部分的温度场分开进行计算[6–8],把定转子之间的热交换转化为散热系数加载,且很多是以一个径向风沟作为研究对象[9–11],这造成了一定的误差。
本文通过Fluent对某型船用发电机定、转子的流场与温度场进行了耦合数值分析,避免使用经验公式把冷却介质对温度场的影响转化为散热系数进行加载,并且同时对电机定子、转子以及流场流道建立模型,气隙作为流道的一部分,分别与电机定子、转子部分发生对流换热,准确地得到电机通风沟内流体的流动状态与温度分布、电机固体部件的温度分布,并进行分析。
发电机转子风速试验的标准要求和计算方法
一、发电机转子结构:(一)发电机转子绕组结构:转子线圈每匝由上下两根含银铜棒组成,全长为加工成矩形槽的铜排,当两根相对的拼在一起时就在中间形成一个矩形通风风道,在线圈直线与端部转角相互连接处附近侧面开有进风孔,在近磁极中心处的铜排侧面开有出风孔。
(二)通风冷却:发电机转子线圈采用氢气内冷的冷却方式。
转子线圈采用分段气隙取气斜流通风式冷却,槽内导体用扁铜线,铜线直线段有两排互相错开倾斜方向相反的通风孔。
氢气依靠装在转轴两端的单级螺旋桨式风扇在发电机内进行密封循环,在带走发电机运行中产生的热量后由装在发电机两端的氢气冷却器将氢气冷却,然后重复进入进行循环。
风扇为送风式,将冷却器冷却后的冷氢气送到各个风区。
定子铁芯和转子绕组采用“五进六出”相对应的通风结构,即沿发电机轴向分为五个进风区和六个出风区,进风区出风区交替布置。
机座内设有四个氢冷器分别布置在励端和汽端两侧。
采用这种通风冷却的发电机为了防止风路的短路,在定子和转子之间气隙中冷热风区间的定子铁芯或转子上加装气隙隔环,以避免由转子抛出的热风吸入转子再循环。
本发电机采用单流环式油密封结构,通过轴颈与密封瓦之间的油阻止了氢气外逸。
轴密封系统为环形每个轴封装置的密封瓦含有各为四段的两个环,换的内径比转轴的直径百分之几毫米。
每段有自紧弹簧径向固定,自紧弹簧是轴向把两排环分开,压力油进入两环之间后分为两路,一路流向机外空气侧一路流向氢气侧,转轴与密封瓦之间的间隙产生的油膜不仅可以防止机内氢气沿该轴外泄也可以防止机外空气沿该轴进入机内影响氢气纯度。
由于本发电机定子入组损耗为定冷水带走,所以风压和风量可以明显的比全氢冷小,故转子风扇设计成单级轴流式风扇,安装在转子护环外的汽励两端柄上。
为提高效率级形成设计的风路,在动叶片外侧的汽、励或汽、集两端都装设一级导向静叶片座,此导向静叶片座沿圆周等分为四个弧段,便于在转子穿入定子内膛就位后并在装好密封支座和密封瓦后,安装在两端端盖上的调整垫块上面。
发电机空气间隙

发电机空气间隙
发电机空气间隙是指发电机转子和定子之间的间隙,也称为气隙。
这个间隙的大小对发电机的性能和寿命有着重要的影响。
空气间隙的大小会影响发电机的输出功率。
如果间隙过大,定子和转子之间的磁场会减弱,导致输出功率下降。
而如果间隙过小,定子和转子之间会发生摩擦,导致能量损失和发热,也会影响输出功率。
因此,发电机制造商会根据设计要求和实际情况来确定最合适的空气间隙大小。
空气间隙的大小也会影响发电机的噪音和振动。
如果间隙过大,转子会在定子内部晃动,产生噪音和振动。
而如果间隙过小,转子和定子之间的摩擦也会产生噪音和振动。
因此,发电机制造商也会在设计中考虑如何减少噪音和振动。
空气间隙的大小也会影响发电机的寿命。
如果间隙过大,定子和转子之间的磁场会不稳定,导致电气部件的损坏和寿命缩短。
而如果间隙过小,转子和定子之间的摩擦会导致机械部件的损坏和寿命缩短。
因此,发电机制造商也会在设计中考虑如何延长发电机的寿命。
发电机空气间隙是一个非常重要的设计参数,它会影响发电机的输出功率、噪音和振动以及寿命。
因此,发电机制造商需要在设计中仔细考虑这个参数,以确保发电机的性能和寿命达到最佳状态。
水轮发电机定子、转子热态气隙变化研究
圆径向位移变化在 06 13 m之间, .5— . r a 铁 心中部位移小, 两端位移大。以环境温度 2 ℃为基准 , O 环境温度每升高 5 铁心 内 ℃, 圆径向位移变化 04 m 。 .4 m
1 'l l 8 4 1 n=4. 8 n n
.
设 计 弹性键 为 :
8 pn = 1 7 mm , g .
因此静 止状 态打 键 紧量设计 为 :
8=2 4 . 8 mm
在打键工况下 , 转子 支架 承受打键力 和
结构重力, 其打键最大等效应力为 29 P , 4M a
关键 词 水 轮发 电机 转 子 气 隙 磁轭 定子铁 心 温 升
1 引 言
发电机定、 转子 间热态气 隙变化不仅 直接影响着发 电机气隙安全 、 发电机定、 转 子间磁密分布 , 而且对 定 、 转子 间磁拉力 , 对发电机刚强度将产生巨大的影响。因此 对其热态气隙变化研究具有十分重要的意 义 。下 面 以我公 司研 制 的某 电站 发 电机 为 例介绍发电机定 、 子间热态气 隙计算 的 转
理。
应 力时 , 加 额定 扭矩 和转 子 的重量 、 心 施 离 力 和部分 打 键 等不 同形 式 的载 荷 , 此 工 在 况下 , 支架 的最 大 等 效 应 力 为 12 a位 5 MP , 于转 子支 架 下 圆盘 通 风 孔 圆弧 上 , 于局 属 部 应 力 集 中。 最 大 径 向位 移 为 0 3m .4 m,
周向位移为 3 2 m .2 m。同时计算得 到磁轭 变形供计算定、 转子气隙时使用。 在 飞逸 转 速 下 , 子 支 架 与 磁 轭 已分 转 离, 且只承受离心载荷和重力载荷 , 转子支 架 在 飞 逸 工 况 下 的 最 大 等 效 应 力 为 23 P , 3 M a属于局部应 力集 中, 大径 向位 最 移 为 16 m .7 m。
水轮发电机空气间隙评估方法研究
2243年第3期2243Number6水电与新能源HYDROPOWER AND NEW ENERGY第35卷Vol.35DOI:10.33222/j.-1300/te.3671-3364.0021.23.213水轮发电机空气间隙评估方法研究高凡,柏文臖,唐伟,李宁(湖北清江水电开发有限责任公司,湖北宜昌443000)扌摘要:水轮发电机空气间隙对其安全稳定运行起着极其重要的作用。
构建了水轮机空气间隙评估模型,评估不同工况下空气间隙是否满足标准。
最后通过算例分析,水轮发电机空气间隙评估模型具有一定的科学性和实用性。
关键词:水轮发电机;空气间隙评估模型;不同工况中图分类号:TV772文献标志码:A文章编号:1671-3354(2023)03-0054-04On tir Evvluation MetOod oO A o Gap in Hydro-torOinr GenerotorsGAO Fag BAI Wenjua,TANG Wd,LI Ning(Hubei Qin/iaac HyZroelectric Development Co.,Lti.,Yichana443000,China)Abstroct:The dir gag in hyZre-tureiee gegerater is impoOant to its safe ang staatg opedtioa.A c eveluatioa moaS of tie dir gag is developen t o determiee tie dir gag meets tie releveet stangaras unngr cUbeet woreing congitiogs. The scientific ang pmcticot nature of tie moPel is verifien by examptg analysisKey WOrOt:hyyre-turCmg gegerator;dir gag evaluatioa1^)X6。
发电机气隙标准

发电机气隙标准《发电机气隙标准》前言嘿,朋友们!咱们今天来唠唠发电机气隙标准这个事儿。
你看啊,发电机在咱们的生活和工业生产里那可太重要了,就像心脏一样,给好多设备提供电力呢。
而这个气隙啊,虽然听起来有点神秘,但它对发电机的正常运转有着超级关键的作用。
这就好比人的关节间隙一样,大小合适才能让身体活动自如。
咱们弄清楚发电机气隙标准,就能更好地保证发电机的性能,避免出故障,还能提高它的使用寿命呢。
一、适用范围这个发电机气隙标准适用的场景可不少。
首先呢,在大型的发电厂里,不管是火力发电、水力发电还是核能发电,那些巨大的发电机都得遵循这个标准。
比如说三峡水电站的那些巨型发电机,要是气隙不符合标准,那可不得了,发电量会受影响,整个电站的效益就会大打折扣。
在一些工业生产企业的自备电站里也同样适用。
像那些炼钢厂啊,他们自己有小型的电站来提供电力。
如果发电机气隙有问题,可能会导致供电不稳定,那炼钢炉就不能正常工作了。
还有像医院这种对电力稳定性要求极高的地方,备用发电机的气隙也得按照这个标准来。
要是在手术进行中突然停电,那可就出大事儿了。
简单说呢,只要是用到发电机的地方,这个气隙标准都得重视起来。
二、术语定义1. 发电机气隙说白了,发电机气隙就是发电机定子和转子之间的空隙。
你可以想象一下,定子就像一个固定的大圆筒,转子呢就像一个在圆筒中间转动的小圆柱,它们之间的这个距离就是气隙。
这个气隙里面充满了空气(或者其他冷却气体),它对发电机的磁场分布、能量转换都有着很重要的作用。
2. 磁场分布这是指在发电机内部磁场的强弱和方向的分布情况。
气隙的大小会影响磁场的分布,就好像你在两块磁铁之间改变距离,它们之间的磁场感觉就不一样了。
如果气隙不合适,磁场分布就乱了套,发电机的发电效率就会降低。
3. 能量转换这就是发电机把机械能转化成电能的过程。
在这个过程中,气隙扮演着很重要的角色。
如果气隙不标准,就像在这个能量转换的高速公路上设置了路障,电能的产出就不会那么顺畅了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于发电机定、转子间气隙的计
算方法简介
1.关于定、转子间气隙结构的介绍
水轮发电机的定转子间的空气间隙,顾名思义就是发电机定子与转子间的间
隙。
具体一点就是定子铁芯壁与转子磁极表面之间的间隙。
其示意图如下:
图1 发电机定、转子间的气隙结构
2.气隙的状态监测方法
首先要明白,测量转子的不圆度以及偏心距和偏心角是对某一个气隙传
感器而言的;定子的不圆度是对某一个磁极而言的。
2.1 键相同步
目前在发电机的定子内壁上装有四个平板电容式位移传感器(后面简称
为:
气隙传感器),和一个电涡流传感器。
其安装方位如下图所示:
图 2 气隙测量示意图
就上图所示的安装方位而言,电涡流传感器W的作用是使键相同步,即当电涡流传感器转一圈后接到电信号时,此时的1 号磁极正好经过B号气隙传感器,当转子转动一圈后,电涡流传感器再次接收到电信号时,此时1 号磁极再次经过B号气隙传感器。
这就是键相同步。
有了键相同步的测量基点后,我们就可以推算出每一个气隙传感器在不同时刻测得的气隙值所对应的是哪一号磁极。
2.2 气隙测量
在确定键相后,就可以通过气隙传感器测出每一号磁极与该传感器的气隙大小,最后可以作出转子轮廓的大致结构。
当我们在定、转子之间装有足够多的气隙传感器时,就可以测出同一个磁极在转子转一圈的过程中与每
一个气隙传感器的气隙大小,这样就可以大致描绘出定子的内壁轮廓。
在气隙传感器测得一段信号后,下面将简单介绍怎样在这组信号中提取出气
隙的值
如下图所示,为B 号气隙传感器在涡流传感器W接收到信号时刻开始测得的
信号波形图
图3 B 号气隙传感器检测到的信号波形
上图是根据图2所对应的磁极关系来确定的B号气隙传感器的信号波形,即当涡流传感器接收到信号时,正好是1 号磁极经过B号气隙传感器。
此后依次是2、3、4 号磁极经过该传感器。
我们所要测量的气隙值就是上图所示的波形的每一个“波谷”,即每一个最小值对应的就是该磁极与定子间的气隙值。
如下面所示,为某一水电站的发电机定、转子间气隙图,该图是就同一传感器(如图2 中的B 号传感器)所测的各磁极气隙大小。
图 4 B 号传感器下测得各个磁极的气隙大小
从上图可以看出,该传感器对应的气隙最大值,发生在6 号磁极上,气隙最大值为26.27mm;最小气隙值为23.79mm,发生在29 号磁极上。
平均气隙为25.03mm。
根据键相同步,还可以测得此时转子的机械转速为136.3r/min 。
同理我们可以就某一磁极得到该磁极与定子之间一周的气隙大小。
这里就不重复举例说明。
3.关于定、转子的轮廓不圆度分析
这里分析不圆度采用的是最小二乘圆法(下一节具体介绍)。
首先关于评定圆的不圆度的定义,即圆度误差:圆的形状偏离几何圆的程度。
其具体的表示方法是将实际轮廓夹在两同心圆之间,当这两几何圆的间隙为最小时,用这两个几何圆的半径只差来表示该轮廓的圆度误差。
根据上一节得到的定、转子轮廓后,就要用最小二乘圆法得到该轮廓
的最小
乘圆。
确定圆心坐标,与实际的测量中心(在转子上就是转子的回转轴线)的相对位置,可以确定转子的偏心距和偏心角,最后可以求出轮廓上的点与最小二乘圆的圆心之间的最大距离R max和最小距离R min,这两个值就可以认为是前面提到的两个同心圆的半径,那么这个差值e 就是该轮廓的不圆度。
结合上一节关于气隙的测量方法,到现在我们就可以知道定、转子间的气隙大小,最大气隙、最小气隙,以及对应的磁极号;还可以知道平均气隙,转子的转速;以及定子不圆度;转子不圆度、偏心距、偏心角。
4.最小二乘圆法
最小二乘圆是一个理想圆,得到最小二乘圆的原理是使从轮廓上的个点到圆的距离的平方和最小。
即:
n
2
(R i R)2 min (i =1,2,⋯⋯,n)
i1
式中:R i ——实际被测的轮廓上各点到最小二乘圆心的距离
R ——最小二乘圆的半径
按最小二乘圆法评定圆度误差的原理如下图所示:
图 5 最小二乘圆法评定圆度误差
根据英国国家标准,以及美国国家标准,确定最小二乘圆的公式如下:
2 n
a x i
n i1
b
2 n
y i
n
i1 n
R 1 R i ,(R i
( x i a)2 ( y i b)2 )
n i1
上面公式不多作说明,但需要指出的是,坐标原点的选取就是转轴回转的轴线(并不一定是转轴的几何轴心),而轮廓上每一点(x i ,y i )就是根据所测气隙值以及相应磁极的方位角求得。
5.总结
上面分别介绍了气隙的测量,定、转子轮廓的得出(这里就是求出轮廓上个
点的坐标),然后求得定、转子的最小二乘圆,最后分析定、转子的不圆度以及
偏心距和偏心角。
下面就图4 所示的实例,依据上面的步骤进行完整的分析。
根据图3 得到
对
应于B号气隙传感器的所有磁极气隙大小,可以绘制出转子的轮廓,如下
图所示:
图 6 定、转子轮廓以及所得最小
这里定子轮廓的得到,是根据同一个磁极转一周后与定子内壁上每一个气隙
传感器的测量值而求出来的(这里没有提供实测数据)。
图中都已经标出了相应的指标,这里不在累赘说明
以上就是关于定、转子气隙大小测量以及相关的评定方法的介绍。