r语言求矩阵的广义逆程序
矩阵论广义逆
矩阵论广义逆矩阵是线性代数中的重要概念,广义逆是矩阵论中的一个关键概念。
在矩阵论中,广义逆用于解决矩阵方程的求解问题。
本文将介绍矩阵论中的广义逆以及其应用。
1. 广义逆的定义在矩阵论中,矩阵的广义逆是指对于任意矩阵A,存在一个矩阵X,满足以下条件:1) AXA=A2) XAX=X3) (AX)^T=AX4) (XA)^T=XA广义逆的存在性和唯一性是矩阵论中的一个重要问题,对于满足以上条件的矩阵X,我们称其为A的广义逆,记作A⁺。
2. 广义逆的性质广义逆具有以下性质:1) AA⁺A=A2) A⁺AA⁺=A⁺3) (A⁺)^T=A⁺4) (AA⁺)^T=AA⁺广义逆的性质使得它在矩阵方程的求解中具有重要作用。
3. 广义逆的应用广义逆在矩阵方程的求解中有广泛的应用,下面介绍其中几个常见的应用:3.1 线性方程组的求解对于线性方程组Ax=b,如果A的广义逆A⁺存在,那么方程的解可以表示为x=A⁺b。
广义逆的存在性保证了线性方程组的解的存在性,并且通过广义逆的计算,可以得到解的一个特解。
3.2 最小二乘问题的求解最小二乘问题是指在给定线性方程组Ax=b无解时,求解使得||Ax-b||^2最小的x。
如果A的广义逆A⁺存在,那么最小二乘问题的解可以表示为x=A⁺b。
广义逆的计算可以通过奇异值分解等方法来实现。
3.3 线性回归分析线性回归分析是统计学中的一种重要方法,用于建立自变量与因变量之间的线性关系。
在线性回归分析中,广义逆可以用于求解回归系数,得到最佳拟合直线,并用于预测和推断。
4. 广义逆的计算方法广义逆的计算方法有多种,常见的包括伪逆法、奇异值分解法等。
伪逆法是通过对矩阵A进行分解或变换,得到A的伪逆矩阵。
奇异值分解法则是通过对矩阵A进行奇异值分解,得到A的伪逆矩阵。
这些计算方法都是基于矩阵的特征和性质进行推导和求解的。
5. 广义逆的应用举例以线性方程组的求解为例,假设有如下线性方程组:2x+y=3x+3y=9将其转化为矩阵形式为:A=[2 1; 1 3]b=[3; 9]求解线性方程组的解可以通过计算广义逆来实现。
总结R语言中矩阵运算的函数
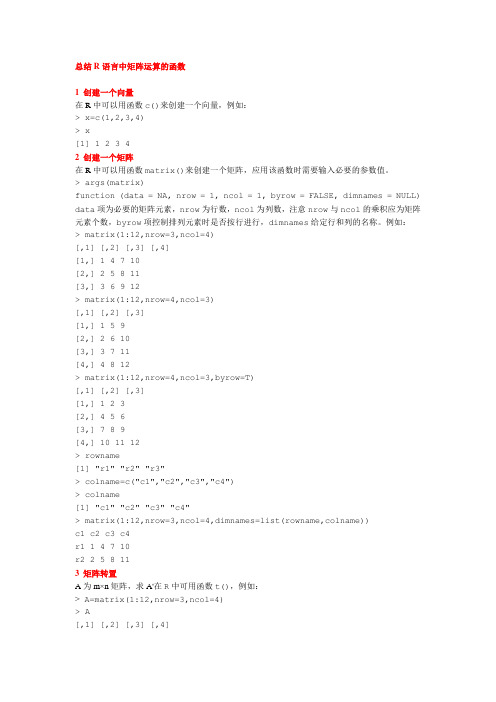
总结R语言中矩阵运算的函数1 创建一个向量在R中可以用函数c()来创建一个向量,例如:> x=c(1,2,3,4)> x[1] 1 2 3 42 创建一个矩阵在R中可以用函数matrix()来创建一个矩阵,应用该函数时需要输入必要的参数值。
> args(matrix)function (data = NA, nrow = 1, ncol = 1, byrow = FALSE, dimnames = NULL) data项为必要的矩阵元素,nrow为行数,ncol为列数,注意nrow与ncol的乘积应为矩阵元素个数,byrow项控制排列元素时是否按行进行,dimnames给定行和列的名称。
例如:> matrix(1:12,nrow=3,ncol=4)[,1] [,2] [,3] [,4][1,] 1 4 7 10[2,] 2 5 8 11[3,] 3 6 9 12> matrix(1:12,nrow=4,ncol=3)[,1] [,2] [,3][1,] 1 5 9[2,] 2 6 10[3,] 3 7 11[4,] 4 8 12> matrix(1:12,nrow=4,ncol=3,byrow=T)[,1] [,2] [,3][1,] 1 2 3[2,] 4 5 6[3,] 7 8 9[4,] 10 11 12> rowname[1] "r1" "r2" "r3"> colname=c("c1","c2","c3","c4")> colname[1] "c1" "c2" "c3" "c4"> matrix(1:12,nrow=3,ncol=4,dimnames=list(rowname,colname))c1 c2 c3 c4r1 1 4 7 10r2 2 5 8 113 矩阵转置A为m×n矩阵,求A'在R中可用函数t(),例如:> A=matrix(1:12,nrow=3,ncol=4)> A[,1] [,2] [,3] [,4][1,] 1 4 7 10[2,] 2 5 8 11[3,] 3 6 9 12> t(A)[,1] [,2] [,3][1,] 1 2 3[2,] 4 5 6[3,] 7 8 9[4,] 10 11 12若将函数t()作用于一个向量x,则R默认x为列向量,返回结果为一个行向量,例如:> x[1] 1 2 3 4 5 6 7 8 9 10> t(x)[,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10][1,] 1 2 3 4 5 6 7 8 9 10> class(x)[1] "integer"> class(t(x))[1] "matrix"若想得到一个列向量,可用t(t(x)),例如:> x[1] 1 2 3 4 5 6 7 8 9 10> t(t(x))[,1][1,] 1[2,] 2[3,] 3[4,] 4[5,] 5[6,] 6[7,] 7[8,] 8[9,] 9[10,] 10> y=t(t(x))> t(t(y))[,1][1,] 1[2,] 2[3,] 3[4,] 4[5,] 5[6,] 6[7,] 7[8,] 8[9,] 9[10,] 104 矩阵相加减在R中对同行同列矩阵相加减,可用符号:“+”、“-”,例如:> A=B=matrix(1:12,nrow=3,ncol=4)> A+B[,1] [,2] [,3] [,4][1,] 2 8 14 20[2,] 4 10 16 22[3,] 6 12 18 24> A-B[,1] [,2] [,3] [,4][1,] 0 0 0 0[2,] 0 0 0 0[3,] 0 0 0 05数与矩阵相乘A为m×n矩阵,c>0,在R中求cA可用符号:“*”,例如:> c=2> c*A[,1] [,2] [,3] [,4][1,] 2 8 14 20[2,] 4 10 16 22[3,] 6 12 18 246 矩阵相乘A为m×n矩阵,B为n×k矩阵,在R中求AB可用符号:“%*%”,例如:> A=matrix(1:12,nrow=3,ncol=4)> B=matrix(1:12,nrow=4,ncol=3)> A%*%B[,1] [,2] [,3][1,] 70 158 246[2,] 80 184 288[3,] 90 210 330若A为n×m矩阵,要得到A'B,可用函数crossprod(),该函数计算结果与t(A)%*%B相同,但是效率更高。
求矩阵的广义逆

0 是A 的广义逆. (证毕)
一般地, 我们有: 如果m ×n 矩阵A 是满秩的, 且A 的 r ( r= m in (m , n) ) 阶子式 i1 i2 … ir
N j1 j2 … jr 的行列式不等于零, 则当m ≤n 时,
第4期
张静 求矩阵的广义逆
381
N-1 1
P
j1
2 j2
…m … jm
≠0 可知A 是满秩的, 但反之不成立.
例 设
125
A=
.
210
因为 A = - 18≠0 , 所以用伴随矩阵法求得A 的广义逆 G 1:
G1 =
1 A
A3
=
-
1
1 18
-
2
-3
-7 - 4=
3
-
1 18
1 9
1 6
又因为, A 的二阶子式:
7 18
2 9
-
1 6
12 N
=
1 2 ≠ 0, N 1 2
下面给出求矩阵广义逆的初等变换法: 本文只对m ≤n 的情形进行讨论, 当m ≥n 时, 利用列式相应的性质可得相应的结论. 用
1 2 …m N j 1 j 2 … jm
表示矩阵 A 的位于 1, 2, …, m 行; j 1, j 2, …jm 列的元素构成的A 的 m 阶子式.
定理 2 设 m ×n 矩阵 (m ≤n)A = (a ij ) , 如果 N
i1 i2 … ir N j1 j2 … jr
(r= m in (m , n) ) 的行列式不等于零, 则
1 2 …m
N-1
p
j1Βιβλιοθήκη j2…jm0
或 N i i1 1
第八章 矩阵的广义逆
第八章矩阵的广义逆前言初等变换和标准形初等变换和标准形举例
§8.1 广义逆矩阵减号逆的概念
减号逆存在定理及求法减号逆存在定理及求法续
关于减号逆公式的注一个减号逆确定所有减号逆1减号逆的主要性质续减号逆的主要性质续
减号逆的主要性质续左逆与右逆的概念矩阵左逆与右逆的求法自反广义逆的概念
自反广义逆的存在与唯一性自反广义逆的唯一性自反广义逆与左(右)逆的关系用满秩分解求自反广义逆
自反广义逆的求法自反广义逆的求法续§8.2 伪逆矩阵
伪逆的存在性求伪逆举例
伪逆的唯一性
伪逆的性质
⎞
⎛−101求伪逆举例
§8.3 广义逆与线性方程组
一般矩阵方程有解的条件一般矩阵方程的通解
用减号逆求解相容线性方程组举例相容线性方程组的最小模解0130
−
相容方程组最小模解的充要条件
相容方程组最小模解的充要条件续
求相容方程组最小模解举例
Ax,即‖Ax-b‖>0.
不相容方程组的最小二乘解
R(A)
Ax 0
不相容方程组的最小二乘解举例用广义逆求最小二乘解定义8.3.2:线性方程组Ax=b 的一个最佳最小二乘
矩阵方程的最小二乘解。
R语言中矩阵运算
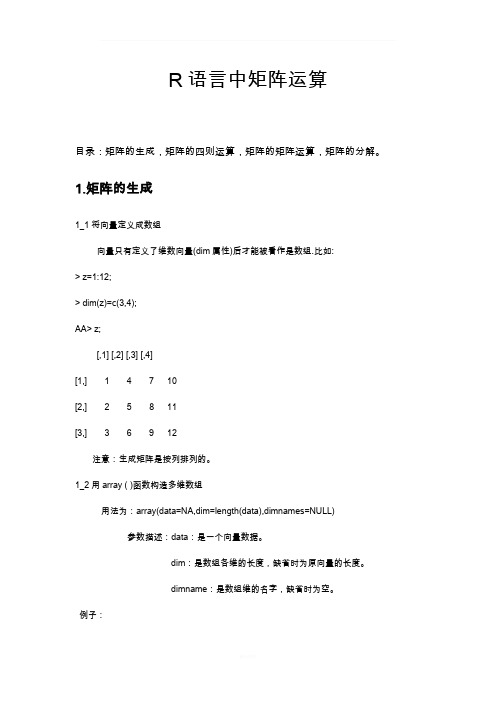
R语言中矩阵运算目录:矩阵的生成,矩阵的四则运算,矩阵的矩阵运算,矩阵的分解。
1.矩阵的生成1_1将向量定义成数组向量只有定义了维数向量(dim属性)后才能被看作是数组.比如:> z=1:12;> dim(z)=c(3,4);AA> z;[,1] [,2] [,3] [,4][1,] 1 4 7 10[2,] 2 5 8 11[3,] 3 6 9 12注意:生成矩阵是按列排列的。
1_2用array ( )函数构造多维数组用法为:array(data=NA,dim=length(data),dimnames=NULL)参数描述:data:是一个向量数据。
dim:是数组各维的长度,缺省时为原向量的长度。
dimname:是数组维的名字,缺省时为空。
例子:> x=array(1:20,dim=c(4,5))> x[,1] [,2] [,3] [,4] [,5][1,] 1 5 9 13 17[2,] 2 6 10 14 18[3,] 3 7 11 15 19[4,] 4 8 12 16 201_3用matrix()函数构造矩阵函数matrix)是构造矩阵(二维数组)的函数,其构造形式为matrix(data=NA,nrow=1,ncol=1,byrow=FALSE,dimnames=NULL)其中data是一个向量数据,nrow是矩阵的行数,ncol是矩阵的列数.当byrow=TRUE 时,生成矩阵的数据按行放置,缺省时相当于byrow=t,数据按列放置.dimname。
是数组维的名字,缺省时为空.A如构造一个3x5阶的矩阵> A=matrix(1:15,nrow=3,byrow=TRUE)> A[,1] [,2] [,3] [,4] [,5][1,] 1 2 3 4 5[2,] 6 7 8 9 10[3,] 11 12 13 14 152.矩阵的四则运算可以对数组之间进行四则运算(+、一、*、/),这时进行的是数组对应元素的四则运算。
第六章广义逆矩阵

第六章广义逆矩阵§6.1 投影矩阵一、投影算子与投影矩阵v设L和M都是C n的子空间,且LÅM=C n.于是任意xÎC n都可唯一分解为x=y+z,yÎL,zÎM,称y是x沿着M到L的投影.v定义将任意xÎC n变为沿着M到L的投影的变换称为沿着M到L的投影算子,记为PL,M ,即PL,Mx=y。
v显然,R(P L,M)=L,N(P L,M)=M.v投影算子P L,M是一个线性算子。
v定义投影算子P L,M在C n的基e1,…,e n下的矩阵称为投影矩阵.记为P。
L,Mv幂等矩阵:A2=Av引理设AÎC n×n是幂等矩阵,则N(A)=R(I-A)。
证明:A2=AÞA(I-A)=OÞ对任意xÎR(I-A),存在yÎC n,x=(I-A)y,必有Ax=0。
故R(I-A)ÌN(A)Þdim R(I-A)£dim N(A)=n-dim R(A)即rank(I-A)£n-rank A。
考虑到I=A+(I-A)Þn£rank A+rank(I-A)有rank(I-A)=n-rank A,使得dim R(I-A)=n-dim R(A)=dim N(A),即得N(A)=R(I-A)。
v定理:P为投影矩阵的充要条件是P为幂等矩阵为投影矩阵,则对任意xÎC n有证明:设P=PL,MP2L,M x = P L,M (P L,M x) = P L,M y = y = P L,M x故P为幂等矩阵。
反之,设P为幂等矩阵n则对任意xÎC有x=x-Px+Px=(I-P)x+Px,其中(I-P)xÎN(P),PxÎR(P),使得C n=N(P)+R(P)。
设zÎN(P)∩R(P),由于N(P)=R(I-P)故存在u,vÎC n使得z=Pu=P2u=P(I-P)v Þz=Pu=(I-P)v=0故N(P)∩R(P)={0}。
矩阵求逆的几种算法
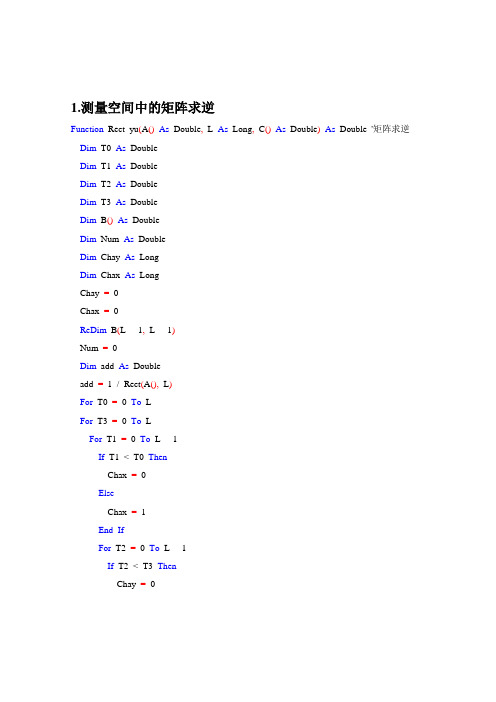
1.测量空间中的矩阵求逆Function Rect_yu(A()As Double,L As Long,C()As Double)As Double '矩阵求逆Dim T0 As DoubleDim T1 As DoubleDim T2 As DoubleDim T3 As DoubleDim B()As DoubleDim Num As DoubleDim Chay As LongDim Chax As LongChay =0Chax =0ReDim B(L -1,L -1)Num =0Dim add As Doubleadd =1 / Rect(A(),L)For T0 =0 To LFor T3 =0 To LFor T1 =0 To L -1If T1 < T0 ThenChax =0ElseChax =1End IfFor T2 =0 To L -1If T2 < T3 ThenChay =0ElseChay =1End IfB(T1,T2)=A(T1 +Chax,T2 +Chay)Next T2Next T1'Rect(B(),L -1)'调用求行列式值C(T3,T0)=Rect(B(),L -1)*add *((-1)^ (T0 +T3))Next T3Next T0End Function******************************************************************************** ******2.复杂的矩阵求逆Option Explicit'先写一个函数用于交换两个数的函数Private Sub swap(byref a As Double,byref b As Double)Dim c As Doublec = aa = bb = cEnd Sub'下面是求矩阵逆阵的函数Public Function Inv(m() As Double) As Double()Dim i As IntegerDim j As IntegerDim k As IntegerDim n As IntegerDim temp As Double'从第 k 行、第 k 列开始的右下角子阵中选取绝对值最大的元素,并记住次元素在的行号和列号,'在通过行交换和列交换将它交换到主元素位置上.这一步称为全选主元n = UBound(m, 1)Dim iw() As IntegerDim jw() As IntegerDim fMax As DoubleReDim iw(0To n), jw(0To n) As IntegerFor k = 0To nfMax = 0For i = k To nFor j = k To nIf Abs(m(i, j)) > fMax Then fMax = Abs(m(i, j))iw(k) = ijw(k) = jNext jNext iIf iw(k) <> k ThenFor i = 0To nswap m(k, i), m(iw(k), i)Next iEnd IfIf jw(k) <> k ThenFor i = 0To nswap m(i, k), m(i, jw(k))Next iEnd IfNext k''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''在m右边增加一个单位阵,构成一个m的增广矩阵mmDim mm() As DoubleReDim mm(0To n, 0To2 * n + 1)For i = 0To nFor j = 0To nmm(i, j) = m(i, j)Next jNext iFor i = 0To nFor j = n + 1To2 * n + 1If i = j - n - 1Thenmm(i, j) = 1Elsemm(i, j) = 0End IfNext jNext i'''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''通过初等行变换(即高斯消去法)使原矩阵变为单位阵,则右边的单位阵即是原矩阵的逆阵For k = 0To n - 1For i = k + 1To ntemp = mm(i, k) / mm(k, k)For j = 0To2 * n + 1mm(i, j) = mm(i, j) - mm(k, j) * tempNext jNext iNext kFor k = n To1Step -1For i = k - 1To0Step -1temp = mm(i, k) / mm(k, k)For j = 2 * n + 1To0Step -1mm(i, j) = mm(i, j) - mm(k, j) * tempNext jNext iNext kFor i = 0To nDim s As Doubles = mm(i, i)For j = 0To2 * n + 1mm(i, j) = mm(i, j) / sNext jNext i'''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''输出变换后的右边的矩阵For i = 0To nFor j = 0To nm(i, j) = mm(i, j + n + 1)Next jNext i'''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''根据在全选主元过程中所记录的行、列交换的信息进行恢复,恢复的原则如下:在全选主元过程中,'先交换的行(列)后进行恢复;原来的行(列)交换用列(行)交换来恢复。
R语言矩阵运算

[1,] 1
[2,] 2
[3,] 3
[4,] 4
[5,] 5
[6,] 6
[7,] 7
[8,] 8
[9,] 9
[10,] 10
4 矩阵相加减
在R中对同行同列矩阵相加减,可用符号:“+”、“-”,例如:
> A=B=matrix(1:12,nrow=3,ncol=4)
[4,] 0 0 0 16
对一个正整数z应用diag()函数将产生以z维单位矩阵,例如:
> diag(3)
[,1] [,2] [,3]
[1,] 1 0 0
[2,] 0 1 0
[3,] 0 0 1
8 矩阵求逆
矩阵求逆可用函数solve(),应用solve(a, b)运算结果是解线性方程组ax = b,若b缺省,则系统默认为单位矩阵,因此可用其进行矩阵求逆,例如:
[转载]R语言矩阵运算
已有 1804 次阅读 2010-5-8 09:50 |个人分类:未分类|系统分类:教学心得|关键词:R语言
主要包括以下内容:
创建矩阵向量;矩阵加减,乘积;矩阵的逆;行列式的值;特征值与特征向量;QR分解;奇异值分解;广义逆;backsolve与fowardsolve函数;取矩阵的上下三角元素;向量化算子等.
> colname=c("c1","c2","c3","c4")
> colname
[1] "c1" "c2" "c3" "c4"
广义逆矩阵求法

广义逆矩阵
定理:设 阵方程
A 是数域 K 上一个s n 矩阵,则矩
AXA A
(1)
总是有解。如果 rank( A) r ,并且
( I nn A A) A A
A ( A ) 0
所以 X ( I nn A A) Z 是方程组 的通解。
AX 0
利用上述定理,可以得到非齐次线性方程组的 另一种形式的通解。
推论:设数域 K 是 n 元非齐次线性方程组 AX 有解,则它的通解为
即
I r B 1 Q P C D 先分析 Q 与 P 1 之间的关系。由已知 A ,
因此我们有
I r 0 1 0 0 Q P 1 分别把 Q , P 分块,设 行 Y1 }r Q Y2 }n r行
伪逆矩阵
定义:设 A C mn,若 A C nm ,且同时有
AA A A ,
H
A AA A
( AA ) AA ,
( A A) A A
H
则称 A 是 A 的伪逆矩阵。上述条件称为 Moore- Penrose 方程。 例:
1 设 A 0
取 B 0, D 0, C (0,,0, k Y ,0,,0)
1 i 2
则
Ir C
于是
0 1 Ir P C 0
1
R语言中矩阵的常规操作

R语⾔中矩阵的常规操作1、⽣成矩阵,使⽤matrix函数> set.seed(111) ## 设定随机数种⼦> vect <- sample(1:10,16, replace = T)> vect[1] 4395381011048109817> dat <- matrix(vect, nrow = 4, ncol = 4, byrow = T, ## ⽣成4⾏4列矩阵,矩阵⾏列相同,也叫⽅阵,并指定⾏名、列名+ dimnames = list(paste0("r",1:4), paste0("c",1:4)))> datc1 c2 c3 c4r1 4395r2 38101r3 104810r4 9817> class(dat)[1] "matrix""array"2、提取主对⾓线元素> datc1 c2 c3 c4r1 4395r2 38101r3 104810r4 9817> class(dat)[1] "matrix""array"> diag(dat) ## 提取主对⾓线元素[1] 48873、提取副对⾓线元素> datc1 c2 c3 c4r1 4395r2 38101r3 104810r4 9817> diag(dat[,ncol(dat):1]) ## 先列逆向输出,然后取对⾓线[1] 510494、⽣成对⾓线为1的对⾓矩阵(对⾓矩阵条件:1、矩阵⾏、列相等,即⽅阵 2、除对⾓线元素外其余元素全部为0)> test1 <- diag(4) ## ⽣成对⾓线元素为1的4⾏4列对⾓元素> test1[,1] [,2] [,3] [,4][1,] 1000[2,] 0100[3,] 0010[4,] 0001> class(test1)[1] "matrix""array"> dim(test1)[1] 445、提取矩阵的下三⾓矩阵、上三⾓矩阵> datc1 c2 c3 c4r1 4395r2 38101r3 104810r4 9817> dat[lower.tri(dat)] ## 提取下三⾓矩阵[1] 3109481> dat[upper.tri(dat)] ## 提取上三⾓矩阵[1] 391051106、矩阵转置(即⾏列互换)> datc1 c2 c3 c4r1 4395r2 38101r3 104810r4 9817> t(dat) ## 矩阵转置r1 r2 r3 r4c1 43109c2 3848c3 91081c4 511077、以矩阵下三⾓矩阵构建对称矩阵(对称矩阵:指以主对⾓线为对称轴,各元素对应相等的矩阵。
矩阵的广义逆

第二节 广义逆矩阵A+
例:令A=
1 0
1 0
,B=
11,可直接验证
A+
=
1 1
/ /
2 2
0 0
,
B+
=
1 2
1 2
任给矩阵A Cmn ,伪逆是否存在呢?若存在是否唯一?
定理1:(Penrose)任给矩阵A Cmn , A存在且唯一.
第三章 矩阵的广义逆
线性方程组及广义逆:Ax=b
第一节 广义逆矩阵
定义1:设A Cmn , 若矩阵X满足四个Penrose方程: 1) AXA A; 2) XAX X ;3)( AX )H =AX ; 4)( XA)H =XA 的全部或者一部分,则称X为A的广义逆矩阵. 满足上述一个,两个,三个或四个方程的广义逆矩阵共有15种.
证明:1)由存在唯一性和方程1-4中A与A+的对等地位可得. 2) 3)由方程1-4共轭转秩和转秩可得. 4)可直接验证,如方程1: AH A( A ( AH ) ) AH A AH ( AA )H ( AA )H A ( AA A)H ( AA A) AH A.同理可证其他方程.
定理2:设A Cmn ,则1)( A ) A; 2)( AH ) ( A )H ;3)( AT ) ( A )T ; 4)( AH A) A ( AH ) , ( AAH ) ( AH ) A;5)( AB) B A; 6)一般地, A A AA I; 7)r( A ) r( A);8) A ( AH A) AH AH ( AAH ); 9)R( A ) R( AH ), N ( A ) N ( AH ).
矩阵的广义逆
矩阵的⼴义逆
定义:
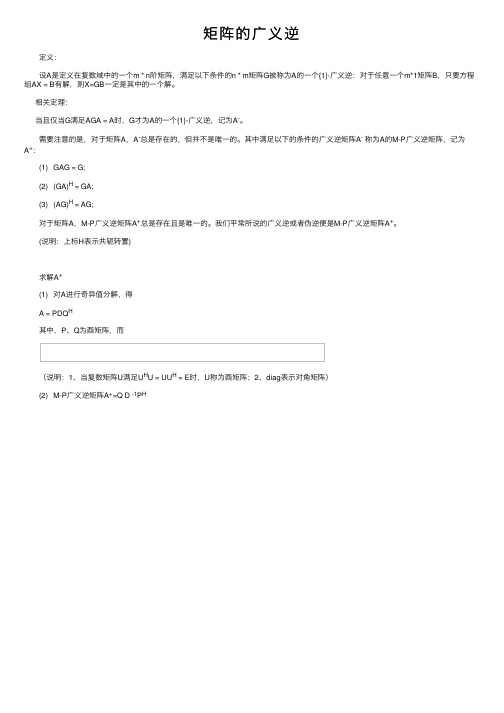
设A是定义在复数域中的⼀个m * n阶矩阵,满⾜以下条件的n * m矩阵G被称为A的⼀个{1}-⼴义逆:对于任意⼀个m*1矩阵B,只要⽅程组AX = B有解,则X=GB⼀定是其中的⼀个解。
相关定理:
当且仅当G满⾜AGA = A时,G才为A的⼀个{1}-⼴义逆,记为A-。
需要注意的是,对于矩阵A,A-总是存在的,但并不是唯⼀的。
其中满⾜以下的条件的⼴义逆矩阵A- 称为A的M-P⼴义逆矩阵,记为
A+:
(1) GAG = G;
(2) (GA)H = GA;
(3) (AG)H = AG;
对于矩阵A,M-P⼴义逆矩阵A+总是存在且是唯⼀的。
我们平常所说的⼴义逆或者伪逆便是M-P⼴义逆矩阵A+。
(说明:上标H表⽰共轭转置)
求解A+
(1) 对A进⾏奇异值分解,得
A = PDQ H
其中,P、Q为⾣矩阵,⽽
(说明:1、当复数矩阵U满⾜U H U = UU H = E时,U称为⾣矩阵;2、diag表⽰对⾓矩阵)
(2) M-P⼴义逆矩阵A+=Q D -1P H。
矩阵理论课件-第三章 矩阵的广义逆

注2:由定理2知
A In
I
m
初等变换
PAQ Q
P
Ir 0 Q
0 0
P
1 0 -1 1
例:设A=
0
2
2
2 ,求A{1}.
-1 4 5 3
解:由
A I4
I3 0
初等变换
I2 0 Q
0 0
P ,这里
0
1 0 1 1
1 0
P=
0
1/ 2
1 2
0 0 1
,
这里只是给出了A{1}的一个构造性描述,在使用上并不直接, 因为还要求出一个A(1).
推论2:方程组(1)相容的充要条件是AA(1)b b,且其通解为 x=A(1)b+(I-A(1)A) y, y Cn任意.
证明:定理1中,取D=b Cm,B=1即得.
注1:因为A+ A{1},故Ax=b相容时,通解为 x=A+b+(I-A+A) y, y Cn.
证明:由A的奇异值分解(r(A)=r),有A=V
Sr 0
0 0
U
H,其中
Sr diag{1, , r},i 0,U和V是酉阵.
令G=U
Sr1 0
AGA=V
Sr 0
0 0
VH
,
可以验证G满足方程1)-4).如第1)3)方程
0 0
U
H
U
Sr1 0
0 0
VH
V
Sr 0
X=A(1) DB(1) +Y-A(1)AYBB(1).(2) 其中Y Cnq为任意.
证明::若AA(1)DB(1)B D,令X=A(1)DB(1)则满足AXB=D. :若AXB=D有解,则D=AXB=AA(1) AXBB(1) B=AA(1) DB(1) B.
R语言矩阵操作之矩阵运算
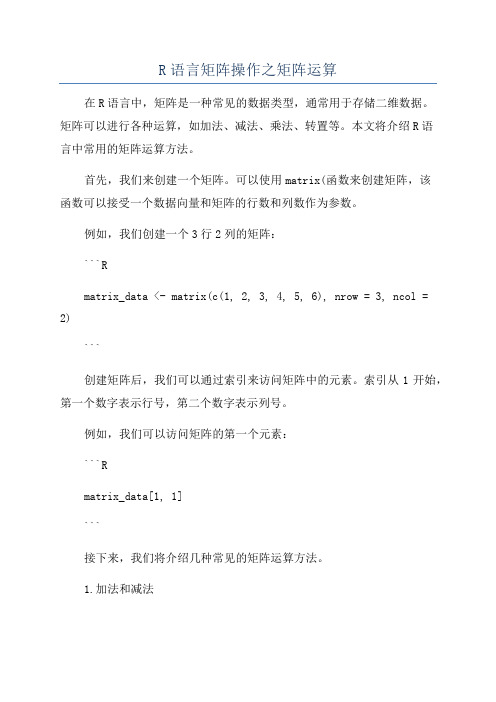
R语言矩阵操作之矩阵运算在R语言中,矩阵是一种常见的数据类型,通常用于存储二维数据。
矩阵可以进行各种运算,如加法、减法、乘法、转置等。
本文将介绍R语言中常用的矩阵运算方法。
首先,我们来创建一个矩阵。
可以使用matrix(函数来创建矩阵,该函数可以接受一个数据向量和矩阵的行数和列数作为参数。
例如,我们创建一个3行2列的矩阵:```Rmatrix_data <- matrix(c(1, 2, 3, 4, 5, 6), nrow = 3, ncol = 2)```创建矩阵后,我们可以通过索引来访问矩阵中的元素。
索引从1开始,第一个数字表示行号,第二个数字表示列号。
例如,我们可以访问矩阵的第一个元素:```Rmatrix_data[1, 1]```接下来,我们将介绍几种常见的矩阵运算方法。
1.加法和减法矩阵的加法和减法与数学上的运算类似,对应位置的元素分别相加或相减。
在R语言中,可以使用"+"和"-"运算符进行加法和减法运算。
例如,我们创建两个相同大小的矩阵,并进行加法和减法运算:```Rmatrix_data1 <- matrix(c(1, 2, 3, 4, 5, 6), nrow = 3, ncol = 2)matrix_data2 <- matrix(c(6, 5, 4, 3, 2, 1), nrow = 3, ncol = 2)matrix_add <- matrix_data1 + matrix_data2matrix_sub <- matrix_data1 - matrix_data2```2.数乘矩阵可以与一个数相乘,即将矩阵中的每个元素都乘以该数。
在R语言中,可以使用"*"运算符进行数乘运算。
例如,我们将矩阵中的每个元素都乘以2:```Rmatrix_mul <- matrix_data1 * 2```3.矩阵乘法矩阵乘法是矩阵运算中的一个重要概念。
R语言矩阵运算
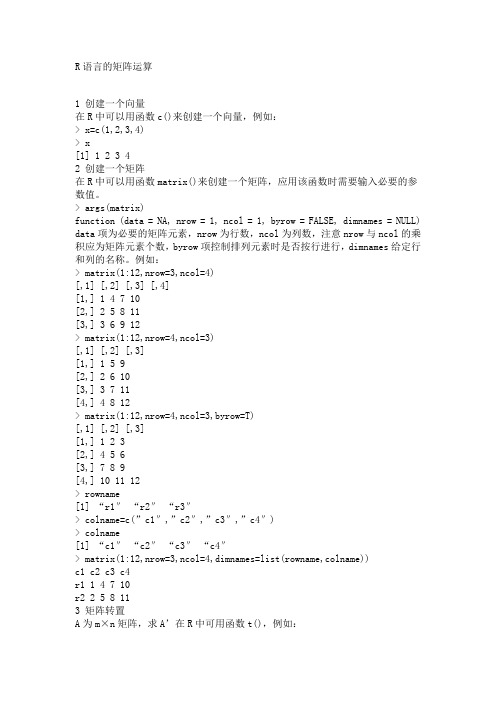
R语言的矩阵运算1 创建一个向量在R中可以用函数c()来创建一个向量,例如:> x=c(1,2,3,4)> x[1] 1 2 3 42 创建一个矩阵在R中可以用函数matrix()来创建一个矩阵,应用该函数时需要输入必要的参数值。
> args(matrix)function (data = NA, nrow = 1, ncol = 1, byrow = FALSE, dimnames = NULL) data项为必要的矩阵元素,nrow为行数,ncol为列数,注意nrow与ncol的乘积应为矩阵元素个数,byrow项控制排列元素时是否按行进行,dimnames给定行和列的名称。
例如:> matrix(1:12,nrow=3,ncol=4)[,1] [,2] [,3] [,4][1,] 1 4 7 10[2,] 2 5 8 11[3,] 3 6 9 12> matrix(1:12,nrow=4,ncol=3)[,1] [,2] [,3][1,] 1 5 9[2,] 2 6 10[3,] 3 7 11[4,] 4 8 12> matrix(1:12,nrow=4,ncol=3,byrow=T)[,1] [,2] [,3][1,] 1 2 3[2,] 4 5 6[3,] 7 8 9[4,] 10 11 12> rowname[1] “r1″“r2″“r3″> colname=c(”c1″,”c2″,”c3″,”c4″)> colname[1] “c1″“c2″“c3″“c4″> matrix(1:12,nrow=3,ncol=4,dimnames=list(rowname,colname))c1 c2 c3 c4r1 1 4 7 10r2 2 5 8 113 矩阵转置A为m×n矩阵,求A’在R中可用函数t(),例如:> A=matrix(1:12,nrow=3,ncol=4)> A[,1] [,2] [,3] [,4][1,] 1 4 7 10[2,] 2 5 8 11[3,] 3 6 9 12> t(A)[,1] [,2] [,3][1,] 1 2 3[2,] 4 5 6[3,] 7 8 9[4,] 10 11 12若将函数t()作用于一个向量x,则R默认x为列向量,返回结果为一个行向量,例如:> x[1] 1 2 3 4 5 6 7 8 9 10> t(x)[,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10][1,] 1 2 3 4 5 6 7 8 9 10> class(x)[1] “integer”> class(t(x))[1] “matrix”若想得到一个列向量,可用t(t(x)),例如:> x[1] 1 2 3 4 5 6 7 8 9 10> t(t(x))[,1][1,] 1[2,] 2[3,] 3[4,] 4[5,] 5[6,] 6[7,] 7[8,] 8[9,] 9[10,] 10> y=t(t(x))> t(t(y))[,1][1,] 1[2,] 2[3,] 3[4,] 4[5,] 5[6,] 6[7,] 7[8,] 8[9,] 9[10,] 104 矩阵相加减在R中对同行同列矩阵相加减,可用符号:“+”、“-”,例如:> A=B=matrix(1:12,nrow=3,ncol=4)> A+B[,1] [,2] [,3] [,4][1,] 2 8 14 20[2,] 4 10 16 22[3,] 6 12 18 24> A-B[,1] [,2] [,3] [,4][1,] 0 0 0 0[2,] 0 0 0 0[3,] 0 0 0 05 数与矩阵相乘A为m×n矩阵,c>0,在R中求cA可用符号:“*”,例如:> c=2> c*A[,1] [,2] [,3] [,4][1,] 2 8 14 20[2,] 4 10 16 22[3,] 6 12 18 246 矩阵相乘A为m×n矩阵,B为n×k矩阵,在R中求AB可用符号:“%*%”,例如:> A=matrix(1:12,nrow=3,ncol=4)> B=matrix(1:12,nrow=4,ncol=3)> A%*%B[,1] [,2] [,3][1,] 70 158 246[2,] 80 184 288[3,] 90 210 330若A为n×m矩阵,要得到A’B,可用函数crossprod(),该函数计算结果与t(A)%*%B相同,但是效率更高。
基于现场可编程门阵列的广义逆矩阵求解
基于现场可编程门阵列的广义逆矩阵求解赵兵;赵辽英【摘要】针对奇异方阵和一般矩阵求逆的高速并行计算问题,该文提出了一种求解矩阵广义逆的现场可编程门阵列实现方案.基于初等行变换求矩阵的秩,利用迹方法求矩阵的广义逆,分别设计了现场可编程门阵列实现的矩阵乘法、矩阵转置、矩阵求秩、循环计算和广义逆计算等模块构成整个系统,通过超高速集成电路硬件描述语言描述,分别用Matlab软件仿真和QuartusⅡ硬件仿真进行了验证.实验结果表明,该文给出的硬件设计方案在保证结果精确的基础上能大大提高运算速度.【期刊名称】《杭州电子科技大学学报》【年(卷),期】2013(033)002【总页数】4页(P17-20)【关键词】广义逆;奇异矩阵;迹方法;现场可编程门阵列【作者】赵兵;赵辽英【作者单位】杭州电子科技大学计算机应用研究所,浙江杭州310018;杭州电子科技大学计算机应用研究所,浙江杭州310018【正文语种】中文【中图分类】TP390 引言近几年,现场可编程门阵列正被越来越多的用于各种矩阵运算[1],如定点、浮点数的运算,矩阵乘法[2],矩阵求逆[3,4],矩阵特征值分解[5]等。
一般的逆矩阵只是对非奇异矩阵才有意义。
实际问题中遇到的矩阵不一定是方阵,即使是方阵也不一定是非奇异的,广义逆是奇异方阵和一般矩阵的广义逆[6]。
目前基于可编程门阵列的矩阵求逆设计与实现都只适合非奇异矩阵的求逆,针对广义逆的硬件实现研究未曾报道。
本文提出了基于迹方法求矩阵广义逆的可编程门阵列实现方案,对这一领域的研究具有一定的参考价值。
1 矩阵的广义逆求解算法矩阵的广义逆求解方法主要有方程求解法、KL分解法、递推法和迹方法[6]4种,其中迹方法精炼明确,也便于并行计算设计,所以本文选用了此方法来求解矩阵的广义逆。
1.1 矩阵广义逆求解的迹方法设已知矩阵Am×n的秩为r,矩阵求广义逆的算法如下:(1)计算B=ATA;(2)令C1=I,初始化矩阵Ci;(3)计算(4)计算A+注意,CiB=O,tr(CiB)≠0。
3.2.R语言基本操作函数(2)矩阵操作
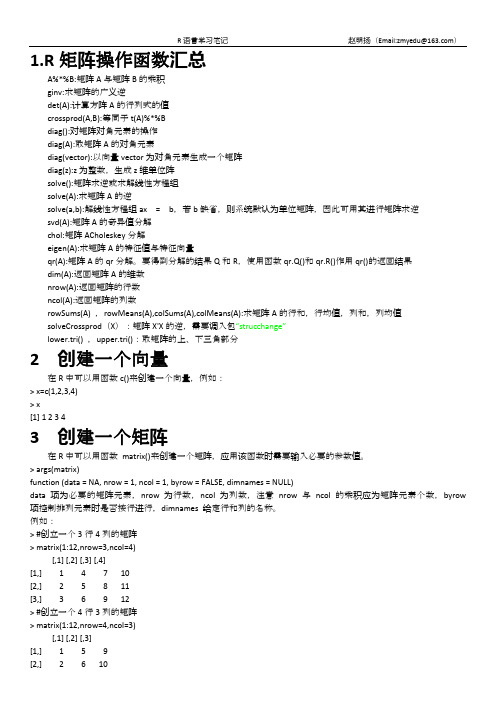
1.R矩阵操作函数汇总A%*%B:矩阵A与矩阵B的乘积ginv:求矩阵的广义逆det(A):计算方阵A的行列式的值crossprod(A,B):等同于t(A)%*%Bdiag():对矩阵对角元素的操作diag(A):取矩阵A的对角元素diag(vector):以向量vector为对角元素生成一个矩阵diag(z):z为整数,生成z维单位阵solve():矩阵求逆或求解线性方程组solve(A):求矩阵A的逆solve(a,b):解线性方程组ax = b,若b缺省,则系统默认为单位矩阵,因此可用其进行矩阵求逆svd(A):矩阵A的奇异值分解chol:矩阵ACholeskey分解eigen(A):求矩阵A的特征值与特征向量qr(A):矩阵A的qr分解。
要得到分解的结果Q和R,使用函数qr.Q()和qr.R()作用qr()的返回结果dim(A):返回矩阵A的维数nrow(A):返回矩阵的行数ncol(A):返回矩阵的列数rowSums(A) ,rowMeans(A),colSums(A),colMeans(A):求矩阵A的行和,行均值,列和,列均值solveCrossprod(X):矩阵X'X的逆,需要调入包“strucchange”lower.tri() ,upper.tri():取矩阵的上、下三角部分2 创建一个向量在R中可以用函数c()来创建一个向量,例如:> x=c(1,2,3,4)> x[1] 1 2 3 43 创建一个矩阵在R中可以用函数matrix()来创建一个矩阵,应用该函数时需要输入必要的参数值。
> args(matrix)function (data = NA, nrow = 1, ncol = 1, byrow = FALSE, dimnames = NULL)data 项为必要的矩阵元素,nrow 为行数,ncol 为列数,注意nrow 与ncol 的乘积应为矩阵元素个数,byrow 项控制排列元素时是否按行进行,dimnames 给定行和列的名称。
编程计算逆矩阵

编程计算逆矩阵(原创版)目录1.逆矩阵的定义与重要性2.计算逆矩阵的方法3.编程实现计算逆矩阵的实例正文【1.逆矩阵的定义与重要性】在线性代数中,矩阵是一种重要的数学工具,它可以描述线性方程组、线性变换等。
有时候,我们需要求解一个矩阵的逆矩阵,逆矩阵在许多实际问题中具有重要意义。
例如,在解线性方程组时,逆矩阵可以帮助我们快速地求解方程组的解。
逆矩阵的定义是:若矩阵 A 满足 A*A=I,其中 I 是单位矩阵,则称矩阵 A 为可逆矩阵,矩阵 A 的逆矩阵记作 A^-1。
【2.计算逆矩阵的方法】计算逆矩阵的方法有多种,常见的有高斯消元法、求解线性方程组法等。
高斯消元法的基本思想是:通过高斯消元的过程,将增广矩阵化为行最简阶梯形矩阵,从而求得逆矩阵。
求解线性方程组法的基本思想是:已知线性方程组 Ax=B,通过求解该方程组,可以得到逆矩阵 A^-1。
【3.编程实现计算逆矩阵的实例】以 Python 为例,可以使用 NumPy 库进行逆矩阵的计算。
```pythonimport numpy as npdef matrix_inverse(matrix):if np.linalg.det(matrix) == 0:raise ValueError("Matrix is singular, cannot be inverted.")return np.linalg.inv(matrix)A = np.array([[2, 1], [1, 2]])A_inverse = matrix_inverse(A)print("A inverse:", A_inverse)```上述代码中,我们定义了一个函数 matrix_inverse(matrix),用于计算矩阵的逆矩阵。
在函数中,我们首先判断矩阵的行列式是否为 0,若为 0,则表示矩阵是奇异矩阵,无法计算逆矩阵,此时抛出异常。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r语言求矩阵的广义逆程序
# R语言求矩阵的广义逆程序。
广义逆矩阵(也称为伪逆矩阵)是矩阵论中的一个重要概念,它在统计学、机器学习和工程学等领域都有广泛的应用。
在R语言中,我们可以使用`MASS`包中的`ginv`函数来求解矩阵的广义逆。
首先,我们需要安装`MASS`包(如果尚未安装),然后加载该包:
R.
install.packages("MASS")。
library(MASS)。
接下来,我们可以使用`ginv`函数来计算矩阵的广义逆。
假设我们有一个矩阵A:
R.
A <matrix(c(1, 2, 3, 4), nrow = 2, byrow = TRUE)。
我们可以使用`ginv`函数来计算A的广义逆:
R.
A_ginv <ginv(A)。
现在,`A_ginv`就是矩阵A的广义逆。
我们可以打印出
`A_ginv`的值:
R.
print(A_ginv)。
这样就可以得到矩阵A的广义逆的数值表示。
除了`MASS`包中的`ginv`函数,R语言中还有其他一些包和函数可以用来求解矩阵的广义逆,比如`pracma`包中的`pinv`函数。
根据具体的需求和背景,选择合适的方法来求解矩阵的广义逆。
总之,R语言提供了丰富的工具和函数来进行矩阵计算,包括求解矩阵的广义逆。
通过这些工具,我们可以方便地进行矩阵运算和线性代数计算,为统计分析和机器学习提供了强大的支持。