gps时钟驯服晶振在南京大学成功案例
gps同步时钟在航天210所的成功案例
gps同步时钟在航天210所的成功案例2019年初,中国航天科工集团第二研究院二一〇研究所在与我公司进行多次交谈后,确认gps同步时钟的基本功能后,根据其要求做出满足使用的gps同步时钟。
在经过各种严格的测试环境后,仍然未出一次故障,210所对此很满意,已将我公司纳为时间频率行业唯一合格供应商。
一、gps同步时钟工作原理gps同步时钟是对现代高科技自动化系统中的计算机及控制装置等进行校时的高科技产品。
NTP协议用于把计算机或者其他的网络设备的时间同步到标准的UTC时间。
网络时钟服务器从GPS卫星上获取到UTC时间信号,并将这些标准的时间信息经过内部高科技处理后通过网口传输给网络系统中需要标准时间信息的设备,这样就可以实现整个系统内的时间同步。
世界上大多数国家采用的标准时间标度是基于地球自转的世界协调时和基于地球公转的公历,UTC时间可以通过多种途径传播。
GPS 卫星导航系统在每颗卫星上都安装有精密的原子钟,并由监测站经常进行校准。
卫星发送时间信息的同时也发送精确的时间信息。
GPS接收机接收此信息。
目前自动化系统采用的时间标准就是UTC时间。
二、有源同步和无源同步任何时间应用系统都应该具有维持时间增长和,该应用系统的用户获取时间的事实上已经成为世界上大多数时间应用系统的基本唯一途径就是访问系统的时间保持体系该时间保时间标准,所以研究持体系就是应用系统的内部时间基准很显然,用户计算机网络的时间同步必须研究有源同步,即必须引访问系统时间保持体系的过程就是用户将自己的时入GPS的时间信号才显得有绝对的意义,在这里,我钟与内部时间基准同步的过程。
由于该系统的内部们将计算机网络中能够起到维持时间增长、保持时间时间基准与外部时间没有关联,同步过程仅限于内稳定的体系称之为时间服务器部。
所以,我们可称之为无源同步或相对同步。
世界协调时与国际原子时保持一致,由于TAI是国际时间管理局将分布在世界25个国家的10多个原子时标经过加权平均以后得到的时间,并且,世界所有官方的标准时间系统都遵从UTC的跳秒。
泰福特HJ5436M广播电视同步时钟模块说明书

HJ5436m 广播电视同步时钟模块HJ5436M是我公司精心设计、自行研制开发的一款高性能GPS同步时钟模块,内置恒温高稳晶振OCXO 和高精度授时型GPS接收机,采用大规模集成电路和泰福特专利GPS频率测控技术,产生并发送精确稳定的时间(1PPS)和频率信号(10MHz频率输出准确度<1E-12),广泛应用于DVB(数字视频广播)、DAB (数字音频广播)、DMB-TH等领域,为数字电视广播领域单频网适配器、上变频器、发射机、复用器、精密偏置激励器等设备提供高精度的时间和频率参考信号。
HJ5436M的1pps时间信息是GPS驯服晶振输出10MHz信号经过10,000,000次分频后得到1pps信号,是UTC时间基准的“复现”,同时正弦波信号相位严格同步于时钟频率信号,不受GPS秒脉冲短时间随机跳变带来的影响,这种特性特别适合于DVB(数字视频广播)、DAB(数字广播)、CDMA等领域。
HJ5436M具有智能学习算法,在驯服晶振过程中能够不断“学习”高稳晶振的漂移等特性,并将这些参数存入板载存储器中,当GPS出现异常或不可用时,HJ5436能够自动切换到保持模式(Hold-over mode),利用高效的智能保持算法,继续提供高可靠性的时间和频率基准信息输出,在短时间内保持较高的精度。
特点•1pps信号与10MHz信号相位一致•高效的智能保持算法•高准确度,24小时平均值优于1E-12•高性能工业级元器件,稳定可靠,MTBF>80000小时技术指标:5路,MCX/SMA/BNC任选输出信号10MHz标准正弦波,幅度≥10dBm,50Ω<1E-12(GPS锁定,24小时平均值)准确度<5E-10(GPS断开,保持24小时后)100ms <5E-11稳定度1s <5E-12 10s <1E-114路,MCX/SMA/BNC 任选,TTL 电平,50Ω 授时精度 50ns (1б)1us (GPS 断开4小时)1PPS保持精度20us (GPS 断开24小时)1路,RS232,NMEA0183,9600-N-8-1监控接口GPS 状态,系统信息选配 10MHz 、E1、B 码、422/485、PPS 、NTP 等 指示灯接口电源、GPS 、1PPS 、锁定显示接口液晶屏接口显示年月日时分秒和GPS 工作状态 12并行通道GPS 接收机接收L1,C/A 码信号-1575.42MHzGPS 接收机 BNC 接口OCXO 老化率5E-10尺寸240 X 120X 16 mm重量<260g电源12V DC 工作温度 -10℃~+50℃ 存贮温度 -25℃~+85℃ 湿度 95%无冷凝物理及环境参数功耗启动<20W工作<15WOEM板1块高灵敏度授时天线1个30米电缆1根标准配置安装支架1套中文说明书1本20X2液晶屏1块指示灯电路板1块Opt B IRIG-B码输出Opt BD 北斗时钟源输入Opt E 电信E1信号输出Opt F DCF77码输出选件Opt N NTP模块输出Opt R 内置铷原子钟守时避雷器、加长天线电缆可按客户需求定制,输出485、422等信息;供电方式可选48V、24V、12V等。
基于GPS驯服技术的高稳频踪设计
De i n o g t biiy f e ue y s nt s z r b s d n G PS t m e t c sg fhi h sa lt r q nc y he i e a e o a e hno o y lg
XU o ho g,LITi— he g,L n Gu — n ec n IXi g
t n lt me t c n lg ,h s meh d a o t d DP L a d Ka ma l r a i me i o a h e e OC i a a e h o o y t i t o d p e L n l n f t r h t t c iv XO al GP t i me h d o i e t c ti S, s h to
c m bie o n d GPS whih ha g o tbii  ̄e e y wi c d hih lng sa lt y qu nc t OCXO h whih ha g ho tsa lt r qu nc a le c d hih s r tbiiy fe e y, nd f tr GPS i
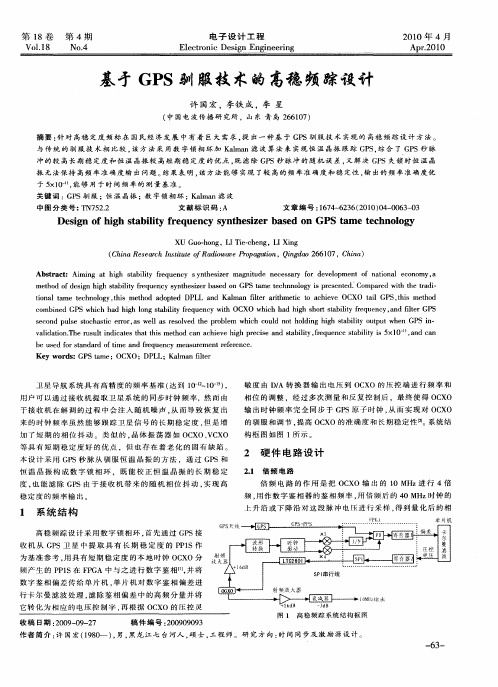
摘 要 : 对 高 稳 定 度 频 标 在 国 民 经 济 发 展 中有 着 巨大 需 求 , 出一 种 基 于 G S驯 服 技 术 实 现 的 高稳 频 踪 设 计 方 法 。 针 提 P 与 传 统 的驯 服 技 术 相 比较 。 方 法 采 用 数 字 锁 相 环 加 K l a 该 am n滤 波 算 法 来 实现 恒 温 晶振 跟 踪 G S 综 合 了 G S秒 脉 P . P 冲 的较 高 长期 稳 定 度 和 恒 温 晶振 较 高短 期 稳 定 度 的优 点 , 滤 除 G S秒脉 冲 的 随 机 误 差 , 解 决 G S失 锁 时恒 温 晶 既 P 又 P 振 无 法保 持 高 频 率 准 确 度 输 出 问题 。 果 表 明 , 方 法 能 够 实现 了较 高 的 频 率 准 确 度 和 稳 定性 , 出的 频 率 准确 度 优 结 该 输
基于北斗授时的时钟驯服系统设计
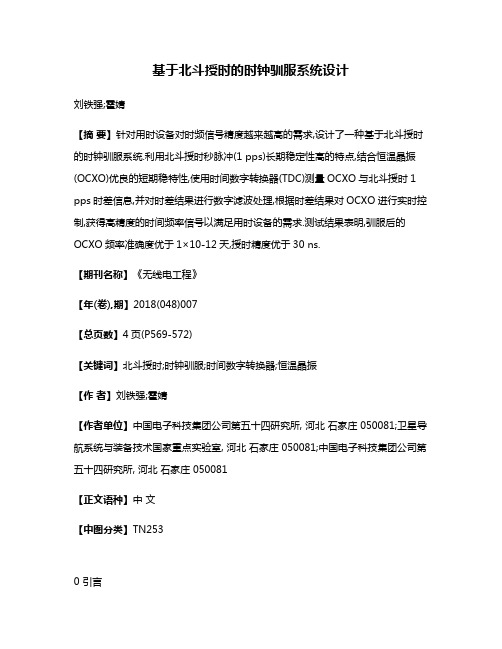
基于北斗授时的时钟驯服系统设计刘铁强;霍婧【摘要】针对用时设备对时频信号精度越来越高的需求,设计了一种基于北斗授时的时钟驯服系统.利用北斗授时秒脉冲(1 pps)长期稳定性高的特点,结合恒温晶振(OCXO)优良的短期稳特性,使用时间数字转换器(TDC)测量OCXO与北斗授时1 pps时差信息,并对时差结果进行数字滤波处理,根据时差结果对OCXO进行实时控制,获得高精度的时间频率信号以满足用时设备的需求.测试结果表明,驯服后的OCXO频率准确度优于1×10-12天,授时精度优于30 ns.【期刊名称】《无线电工程》【年(卷),期】2018(048)007【总页数】4页(P569-572)【关键词】北斗授时;时钟驯服;时间数字转换器;恒温晶振【作者】刘铁强;霍婧【作者单位】中国电子科技集团公司第五十四研究所, 河北石家庄 050081;卫星导航系统与装备技术国家重点实验室, 河北石家庄 050081;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TN2530 引言时间是物理学中7个基本物理量之一,与人们的日常生活、科技发展密切相关。
在测控与通信系统中,随着技术探索的进步,对时间频率基准源的精度要求越来越高。
高精度的频率源(如氢原子钟、铯原子钟和铷原子钟)能够为测控与通信系统提供高精度的时间频率基准,但价格高,难以普及使用[1]。
常用的OCXO等二级频标价格低廉,体积较小,但受晶体老化和温度等因素的影响,其输出频率漂移率较大,约为5×10-8/月,长期稳定度较差,很难满足测控与通信系统需求[2]。
随着我国北斗卫星导航系统的发展[3],北斗授时在军民各领域中得到了广泛应用,本文利用北斗授时的特点对本地OCXO进行驯服,能够有效解决OCXO由于老化以及长期稳定性差带来频率漂移等问题。
利用北斗授时校准本地OCXO,需要测量北斗授时1 pps信号与OCXO分频产生1 pps信号的时间差,通过时间差计算频率偏差,再根据频率偏差改变OCXO的压控电压实现对OCXO的校准。
基于GPS驯服晶振的高精度频差测量

• 82•基于GPS驯服晶振的高精度频差测量西南民族大学电气信息工程学院 甘 桂 彭良福 吴万强在5G移动通信系统中,为了实现高精度和高稳定度的时钟源,在时钟驯服方案中通过FPGA实现低频粗计数与高频细计数来测量本地晶振与GPS信号的频差,为后续送入PID控制模块提供了良好的输入。
仿真结果表明,用50MHz晶振倍频到的100MHz测量细计数,可以达到10ns 的精度。
在实际应用中,可以倍频到更高频率进行误差项的细测量。
引言:在移动通信发展的5G 时代,通信网络对时钟频率的稳定性和精确度要求越来越高,与参考时间源的误差需要控制在±1.5µs 之内。
GPS 是当今授时精度最高、应用最为广泛的全球定位系统。
基于GPS 接收机的各种同步授时装置已广泛应用于通信、电力、金融和航天等领域。
时钟驯服指的是利用卫星授时标准信号校准锁定高稳定的本地晶振。
晶振驯服可选用不同的方法,以GPS 卫星授时时间驯服晶振优势明显,这种方法结合了卫星授时的长期稳定性和晶振的短期稳定性,具有很好的应用前景。
1.驯服原理GPS 信号有非常好的长期稳定性,但它的短期稳定性比较差。
用高精度的GPS 信号和本地高稳定的时钟结合在一起,使用GPS 驯服本地晶振,可以明显改善本地时钟输出的稳定性。
时钟驯服的基本原理是通过GPS 授时接收机接收到1pps 频率的信号和本地振荡器的信号进行频率测量、对比算出频差。
把得到的频差送到滤波器滤除噪声,然后进入PID 控制模块通过分频电路或电压控制调节其频率,最后使本地晶振的频率与接收到GPS 信号的频率一致,达到驯服本地晶振的目的。
对GPS 接收机接收的数据进行处理,测出频差的过程在这个系统中占着十分重要的地位,其测量精度直接决定了时钟驯服的精度上限。
2.测频系统实现在测量一个信号频率的时候,在时间已知的情况下,测量脉冲的个数,就可以计算出这个信号的频率。
图1 直接计数法2.1 直接计数法原理测量一段时间间隔内时钟脉冲的个数最常用的方法是直接计数法。
GPS驯服CPT原子钟方法研究

钟利用原子在微波谐振腔中与微波发生作用产生微波 鉴频信号,实现对原 子 钟 输 出 频 率 的 稳 频.受 到 微 波 波 长的限制,微波腔体积至少达几个 cm3,因此物理系统 体积至少在 10cm3水平.相干布居囚禁 (CPT,Coherent PopulationTrapping)原子 钟 是 一 种 新 型 原 子 钟,它 采 用 微波调制激光获得的相干双色光与原子作用产生微波 鉴频信号而 实 现 原 子 钟 输 出 频 率 稳 频.由 于 没 有 微 波 腔体积的限 制,利 用 微 机 电 加 工 工 艺 可 以 实 现 芯 片 尺
ChineseAcademyofSciences,Wuhan,Hubei430071,China)
Abstract: Basedonthefeaturesoftheoutputonepulsepersecond(1PPS)signaloftheGlobalPositioningSystem (GPS)receiver,andthecharacteristicsoftheoutputfrequencysignaloftheCoherentPopulationTrapping(CPT)atomic clock,wedesignandrealizeaGPSdisciplinedCPTatomicclockdevice.Fordepressingjitternoiseofthe1PPSsignal,we haveestablishedthecorrespondingKalmanfiltermathematicsmodel,obtainedthenoiseparametersthroughtheoreticalcalcu lation.WehaveexperimentallyfilterprocessedthefrequencysignalofCPTatomicclockwithacombinationoftheAvera gingfilterandKalmanfilter,andcalibratedtheoutputfrequencyofCPTatomicclockwiththe1PPSsignal,andachieved thatreducingthemedium andshortterm frequencyerrorbyhalfmagnitudeandimprovingdayfrequencystabilitybyoneor derofmagnitude.
基于TDC的GPS驯服恒温晶振系统设计

恒 温晶振 系统 。使 用 G S对恒 温 晶振进 行 实 时校 准 , P 获得 了高精 度 的频 率信 号 。通 过 T C测 量 时 D
差数 据计 算得 到 恒温 晶振 的频 率准确 度 , 时差测量精 度 达到 20p。采 用优 化 的递推 平均 滤 波算 其 5 s
法 对 时差数据 进行 滤 波处理 , 消除 了 G S秒信 号抖 动 引入 的干扰 , P 缩短 了频 率驯服 时间 , 率驯服 精 频
De in o sg fa GPS Dicp i e CXO y tm s d o sil d O n S se Ba e n TDC L i-a 1 H NG Tn U J h i, Z A og一 a 2 2 T iohn 2 ,AO Xa -og , H oqa 2 C u -a2 a-in , h nh /
t n cn rah2 0p i a c 5 s.Afe e i tra a ap o e s d w t p i z e u sv v r g le g rt m,itr o e trt ne v d t r c s e h o t h l i mie rc rie a e a e f tra o h d i l i ne— f rn e o e c fGP e o d d t ei g C v ie n icp ie i ffe u n y c n b h re e . e S s c n i rn a b a od d a d ds il d t h n e n me o rq e c a e s otn d Ke r s: a u me ta d c n rls se ;i y wo d me r s e n n o to y tm t me—fe e c y tm;i y c rn z t n;i o dgt Ol r q n y s se tme s n h o iai tme t ii C I— u o l a v re ; S d s i l e : v H c nr le r sa s i ao etr GP icpi d o e — o told c ytlo cl tr n l
基于数字锁相环的GPS可驯钟系统研究
准频率源 , 将其与本地晶振产生 的 1 P 信号 同时输入高分辨率的时间间隔计数器后得到时差 , S P 再将这个
时差值送人主控制器进行处理 ,得到一个 电压控制信号 ,然后将其送给一个压控振荡器来控制本地晶振 , 从而改善本地 晶振 的输 出翻 。
图 2 基于数字锁相环 的 G S可驯钟 的系统框 图 P
在本方案 中, 首先假定 G S 收机输 出 的 1 P P接 S信号是理想的 。 P 如前所 述 , 要实现校频首先就要 测得校频时 间段 的相位差 变化或时差变化 ,在本方案 中利用伪 随机码 良好 的 自相关特性来测量本地 码与准码的相位差 。所 以这 里 ,伪 随机码 的 自相关特性 是测量相位差 的理论基 础 。 伪 随机码简称伪码或 P N码 ,是一种预先确定并可重 复产生和复制 ,具有类 似 白噪声随机统计 R 特性 的二进制码序列吲 伪码 的产 生方式很多 , 。 为方便起见 , 这里采用 的是 G S系统 里使 用的 CA码 , P /
AT
一 = 一 一
( 2)
|
1
( ) 中 / 2 式 ,表示相对 频偏 ,可 由对 被校频标与基准频标在不 同时刻 的时差 或相位差的测 量
得到 。根据所得到 的相对频 偏 ,可得到对 被校频标 的修正值 ,进 而改善被校频标输 出的准确度n 。
3 GS P 可驯钟一 般实现方法
维普资讯
总第 3 卷 第 1 1 期 2 0 年 6月 08
a ' ̄ 频 率 学 报 dj I -
J un l f i n rq e c o r a mea dF e u n y oT
一种适用于GPS信号异常情况的高精度主时钟设计方法
一种适用于GPS信号异常情况的高精度主时钟设计方法文超;钟俊【摘要】合并单元采样同步是智能变电站正常工作的前提.GPS信号正常时利用最小二乘法建立晶振的误差估计模型,GPS信号异常时利用晶振产生秒脉冲,并用已建立的晶振误差估计模型对这些秒脉冲进行误差补偿后用以作为各合并单元的同步时钟,提出了一种利用GPS信号接收机和晶振共同组成主时钟的设计方法.该方法综合考虑了晶振已有的频率偏差和在GPS信号异常期间由于晶振老化所带来的误差,估计并补偿了GPS信号异常时晶振秒脉冲的误差.仿真结果表明该方法能有效消除晶振累积误差,所产生秒脉冲的误差在前10 min内不超过50 ns,满足系统对时钟的精度要求.【期刊名称】《电力系统保护与控制》【年(卷),期】2016(044)003【总页数】6页(P103-108)【关键词】GPS;合并单元;时钟精度;最小二乘法;误差补偿【作者】文超;钟俊【作者单位】四川大学电气信息学院,四川成都610065;四川大学电气信息学院,四川成都610065【正文语种】中文智能变电站是智能电网的重要组成部分。
IEC 61850标准将智能变电站分为三层:过程层、间隔层和站控层。
跟传统变电站相比,智能变电站增加了合并单元、智能终端等模块[1]。
作为智能变电站的核心器件之一,合并单元是将一次系统的模拟量就地数字化的重要设备[2-3],是电子式互感器与间隔层设备的接口[4-5],间隔层的保护和测量IED所需的采样数据几乎都来自于过程层的合并单元[6],合并单元将采样数据同步处理后通过以太网传送给保护和测量IED[7]。
许多保护和测量算法都要求各路采样值是同一时刻的[8]。
保证采样数据的同步,是保护和测量IED等设备正常工作的基础。
在实际应用中,一般通过时间同步法或插值法来实现采样数据的同步[8-9]。
对于插值法,当出现高次谐波或采样频率过低时,插值误差会迅速增大,无法满足保护和测量IED对数据精度的要求,同时还会出现频谱泄漏问题[9-10]。
基于CPLD的GPS时钟驯服模块设计与实现
c o nt r o l l f ow of t he m odu l e a r e i n t r o du c e d.F i n a l l y t h e a v a i l a bi l i t y of t h i s de s i gn i s v e if r ie d ba s e d on t he o r e t i c a l c a l c ul a t i on a nd p r a c t i c a l
us e.
Ke y wor d s : CPLD ; G PS ;c l oc k t a me ;O ve n Con t r ol l e d Cr ys t a l Os c i l l a t or
1引 言
现代通信 系统对 参考时钟 的输 出频率有较高要求 .未ห้องสมุดไป่ตู้
[ 摘 要】 现代通信 系统 中, 高稳定性和 高准确度的参考时钟源非常 重要 , 为整个通信 系统提供频率参考 基于此需求设计
并 实现 了一 款 基 于 C P L D 的 GP S时 钟 驯 服 模 块 ,给 出 了该 模 块 的 基 本 框 架 和 构 成 ,介 绍 GP S时钟 驯 服 使 用 的 关键 技 术— —
Abs t r a c t : I n M ode m c on m m ni c a t i on s ys t e ms , t h e h i gh s t a bi l i t y a nd h i gh a c c u r a c y o f t he r e f e r e nc e c l o c k s o ur c e a r e v e r y i mp o r t a n t f o r t he e n t i r e c on m m ni c a t i on s ys t e m t o pr o vi d e f re q ue nc y r e  ̄r e nc e .Ba s e d on t hi s r e q ui r e me n t ,t hi s p a pe r de s i g ns a n d h np l e m en t s a
基于GPS校准晶振的高精度时钟的设计

收稿日期:2009-11 作者简介:张国琴(1977—),女,讲师,研究方向为数字信号处理。
基于GPS 校准晶振的高精度时钟的设计张国琴,吴玉蓉(武汉科技学院电子信息工程学院,湖北武汉430073) 摘要:文章结合高精度晶振无随机误差和GPS 秒时钟无累计误差的特点,采用GPS 测量监控技术,对高精度晶体振荡器的输出频率进行精密测量和调节,使晶振的输出频率同步在GPS 系统上,从而提供高精度的时钟信号。
根据此方法研制了具有高性价比的高精度时钟发生装置,并成功的应用于通信系统中。
关键词:GPS;晶振;高精度;时钟中图分类号:T M764 文献标识码:B 文章编号:1006-2394(2010)04-0023-02D esi gn of H i gh Prec isi on C lock Ba sed on the GPS D isc i pli n ed O sc ill a torZ HANG Guo 2qin,WU Yu 2r ong(College of Electr onics &I nfor mati on Engineering,W uhan University of Science and Engineering,W uhan 430073,China )Abstract:A s the GPS 2cl ock is free of cu mulative err or and the high p recisi on crystal oscillat or is free of random err or,the t w o cl ocks can be effectively co mbined .By adop ting advanced GPS monit oring and contr olling technol ogy,the out put frequency of the crystal oscillat or is measured and adjusted .The high p recisi on cl ock with high perf or mance p rice rati o is designed,which has been successfully app lied in co mmunicati on syste m.Key words:GPS;crystal oscillat or;high p recisi on;cl ock0 引言本文结合GPS 的长期稳定性校准晶振频率,采用GPS 测量监控技术,对晶体振荡器的输出频率进行精密测量和调节,使晶振的输出频率同步在GPS 系统上,提供高精度的时间频率基准信号。
基于TDC的GPS驯服恒温晶振系统设计
基于TDC的GPS驯服恒温晶振系统设计陆加海;张同双;陶小红;陈浩谦;李春海【摘要】为满足测控系统对高精度时间频率的要求,设计了一种基于时间数字转换器(TDC)的驯服恒温晶振系统.使用GPS对恒温晶振进行实时校准,获得了高精度的频率信号.通过TDC测量时差数据计算得到恒温晶振的频率准确度,其时差测量精度达到250 ps.采用优化的递推平均滤波算法对时差数据进行滤波处理,消除了GPS 秒信号抖动引入的干扰,缩短了频率驯服时间,频率驯服精度优于3×10-11.【期刊名称】《电讯技术》【年(卷),期】2011(051)012【总页数】4页(P113-116)【关键词】测控系统;时间频率系统;时间同步;时间数字转换器;GPS驯服;恒温晶振【作者】陆加海;张同双;陶小红;陈浩谦;李春海【作者单位】上海交通大学,上海200030;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431【正文语种】中文【中图分类】TN75;P128.151 引言测控系统要求有高精度的时间频率系统。
为了保持站点间时间同步,一般采用铷原子钟或恒温晶振(Oven-Controlled Crystal Oscillator,OCXO)来提供时间频率信号。
前者的成本较高,后者频率准确度较差,不能满足测控系统的指标要求。
为解决上述问题,本文采用GPS对恒温晶振进行驯服,综合了GPS时间信号长稳指标高的优点和恒温晶振短稳指标高的优点,从而获得了高稳定度和高准确度的频率信号。
为了计算恒温晶振相对于GPS的频率偏差,需要长时间测量GPS秒信号与恒温晶振分频信号之间的时差,通过时差计算得到频率偏差,再根据频率偏差来校准恒温晶振,所以时差测量的精度直接影响到频率驯服的精度。
文献[1]采用FGPA延迟线内插法测时差,测量精度达到121 ps,但测量线性化较差、成本高。
gps卫星铷原子钟在中电25所的成功案例
gps卫星铷原子钟在中电25所的成功案例2017年年末,西安同步电子自主研发生产的gps卫星铷原子钟在中国电子集团第25所的成功使用。
为25所提供标准的频率源,为后续的科研工作提供了必不可少的基准源。
前言时间频率标准分为一级频率标准、二级频率标准。
现代多以实验室铯束频率标准、铯原子喷泉频标为一级频率标准,一级频率标准根据秒的定义、通过实验测量和理论计算,估计出各种已知因素引起的频率偏差的数值,并给出估算的不确定度,定出频标的准确度。
虽然一级频率标准有很好的长期稳定度和准确度,但是其使用条件苟刻,维护成本高,而且售价昂贵,因而只能使用在一些有条件的实验室中。
二级频率标准中的铷原子频标价格较为低廉,是使用最广泛的频率标准设备,同时输出频率具有较好的的频率稳定度和频率准确度指标。
目前,许多工程应用领域对时间频率提出了高精度的要求,例如智能电网、数字移动通信网和无源定位系统等。
但是,铷原子频标的频率不够准确,频率被校准后还会随着时间缓慢漂移,因而并不能满足高精度的时间同步的要求。
最近二十年,随着美国的全球卫星导航系统的不断现代化、俄罗斯的、欧洲的系统,以及中国正在全面部署的北斗卫星导航系统的迅猛发展,通过导航卫星将守时实验室的时间频率的准确度传递到远端的用户已经非常易实现,或者说这种技术大范围应用的条件己经非常成熟,已经能够提供廉价并且性能优越的时间频率产品。
而小型铷原子频标,因为其功耗低、体积小、价格低廉、抗恶劣环境能力出众,并且具有较好小型伽原子频标的时间应用研究旳中短期稳定度,可以显著消除时间在传递路径中引入的中短期稳定度的恶化,能很好的完成用户端的时间频率的传递和保持功能。
因而,通过授时设备将守时实验室的标准的时间频率的准确度传递给小型铷原子频标,最终提高用户端的时间同步精度将成为一种很好的选择。
gps卫星铷原子工作原理gps卫星接收机能够提供非常好的频率长期稳定度和准确度,恰好能够补偿铷原子频标的频率漂移和频率准确度差的缺点。
科技成果——GPS北斗卫星时钟驯服高精度晶体振荡器

科技成果——GPS/北斗卫星时钟驯服高精度晶体振荡器所属领域电子信息成果简介GPS/北斗卫星时钟驯服高精度晶体振荡器,以高速微处理器为核心,选用高精度授时型GPS接收机/北斗单向授时接收机,提供高可靠性、高冗余度的时间基准信号,并采用精准的测频与智能驯服算法技术驯服晶体振荡器,使晶体振荡电路输出的时间同步信号精密同步在GPS/北斗时间基准上,并输出短期和长期稳定度都十分优良的高精度同步信号。
由于装置输出的1PPS等时间信号是内置振荡器的分频秒信号输出,同步于GPS/北斗信号但并不受GPS/北斗秒脉冲信号跳变带来的影响,相当于UTC时间基准的复现。
采用了“智能学习算法”的GPS 时钟,在驯服晶振过程中能够不断“学习”晶振的运行特性,并将这些参数存入板载存储器中。
当外部时间基准出现异常或不可用时,装置能够自动切换到内部守时状态,并依据板载存储器中的参数对晶体振荡器特性进行补偿,使守时电路继续提供高可靠性的时间信息输出,同时避免了因晶体振荡器老化造成的频偏对守时指标的影响。
应用范围GPS/北斗卫星时钟驯服高精度晶体振荡器,采用全模块化结构设计,其输入、输出、电源等均可灵活配置,对于输出信号的种类和数量都可根据需要灵活选择配置。
具有标准RS232、RS422/485、脉冲、IRIG-B输出等接口形式,可以适应各种不同设备的对时需要,广泛应用于电力、金融、通信、交通、广电、石化、冶金、国防、教育、IT、公共服务设施等领域。
技术特点1、内部晶体振荡单元采用了先进的时间频率测控技术与智能驯服算法,晶体选用高精度恒温晶体振荡器,使装置准确度优于7×10-9(0.92μS/分钟),即在外部时间基准异常的情况下,每天时钟走时误差不超过0.6mS。
2、选用高性能、宽范围开关电源,工作稳定可靠。
3、支持单GPS、单北斗、双GPS、双北斗、GPS/北斗双系统卫星接收机配置。
4、应用GPS授时技术/北斗授时技术/B码基准解码接收技术/高稳晶体振荡器守时技术授时,实现多基准冗余授时,能够智能判别GPS信号、北斗信号、外部B码时间基准信号的稳定性和优劣,并提供多种时间基准配置方法。
基于GNSS的晶振驯服方法分析
收 稿 日期 :2017-03—10 联 系 人 :薛 毅 聪 E—mail:xueyicong123@ 163.tom
第 4期
薛毅聪 ,等 :基 于 GNSS的 晶振 驯服 方法 分析
39
图 1 基 于 GNSS的 晶振 述 原 理 可 知 ,GNSS驯 服 晶 振 的 主 要 环 节 是 钟差 滤波 算 法和频 率 控制 方法 ,以下分 别展 开讨 论 。
2 几 种 常用 滤 波 方 法 分 析
在 GNSS晶振 驯 服 系 统 中 ,误 差 来 源 受 各 项
因素 的影 响 ,一 方 面 系 统 精 度 与 GNSS授 时 接 收
机输 出的 钟 差 有 密 切 联 系 ,然 而 GNSS授 时 接 收
关 键 词 :GNSS;晶 振 驯 服 ;最 小 二 乘 ;Kalman滤 波 中图分 类 号 :P228.4 文献 标 志码 :A 文章 编号 :1008—9268(2017)04—0038—05
0 引 言
在 导航定 位 、计 量 测 试 、测 控 通 信 、电信 电 力 、 金融 等 领域 中 ,许 多设 备 都需 高精 度 的时 间频 率基 准进 行 协调 同步 工 作 ,并 且 随着 导 航 、测 量 技 术 的 发展 ,要 求频 率标 准精 度越 来 越高 口]。在一 般情 况 下 ,可 以利用 高稳 定 的恒 温 晶体 振 荡 器 来 实 现 ,准 确度 可 达到 1O 量 级 ,在 要求 精 度 更 高 的场 合 可 以 选用 铷 钟 作 为 频 率 标 准 ,其 准 确 度 可 达 10。 量 级f- 。但 是采 用 晶 体 振 荡器 或 者铷 钟 作 为 频 率 标 准 的时 统设 备都 存 在一个 问题 :长期 频率 漂移 造成 频率 准 确 度 降 低 。然 而 更 高 一 级 的频 率 标 准 (氢 钟 ,铯钟 )成 本高 ,设 备 体 积 大 ,不 能 满 足普 遍 使 用 需求 。所 以提 供一 个 高 精 度 、低 成 本 、满 足 普 遍使 用需 求 的频 率标 准 源非 常关 键 。
用于时钟驯服的数据处理方法[发明专利]
![用于时钟驯服的数据处理方法[发明专利]](https://img.taocdn.com/s3/m/f8c38c38f68a6529647d27284b73f242336c313d.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910556873.3(22)申请日 2019.06.25(71)申请人 西南民族大学地址 610000 四川省成都市武侯区一环路南四段16号(72)发明人 彭良福 王逸凡 (74)专利代理机构 四川省成都市天策商标专利事务所 51213代理人 王荔(51)Int.Cl.G06F 17/11(2006.01)G06F 17/16(2006.01)H03H 17/02(2006.01)G01S 19/25(2010.01)(54)发明名称用于时钟驯服的数据处理方法(57)摘要本发明公开了一种用于时钟驯服的数据处理方法,包括:根据随机抽样一致性算法得到观测数据的最佳直线方程模型;计算各观测数据到所述最佳直线方程模型的直线距离;根据各观测数据对应的直线距离赋予各观测数据相应的权值系数;将所述各观测数据对应的权值系数作为Vo nd ra k 滤波法中的观测数据的权值,采用Vondrak滤波法对观测数据进行滤波,得到一条关于观测数据的滤波曲线。
本发明解决目前在时钟驯服过程中当观测误差未知时,常用的滤波方法不能较好地探测和剔除数据粗差的问题,得到良好的滤波效果。
权利要求书1页 说明书5页 附图2页CN 110188315 A 2019.08.30C N 110188315A1.一种用于时钟驯服的数据处理方法,其特征在于,包括:步骤1、根据随机抽样一致性算法得到观测数据的最佳直线方程模型;步骤2、计算各观测数据到所述最佳直线方程模型的直线距离;步骤3、根据各观测数据对应的直线距离赋予各观测数据相应的权值系数;步骤4、将所述各观测数据对应的权值系数作为Vondrak滤波法中的观测数据的权值,采用Vondrak滤波法对观测数据进行滤波,得到一条关于观测数据的滤波曲线。
2.根据权利要求1所述的用于时钟驯服的数据处理方法,其特征在于,所述步骤1具体包括:步骤1.1、获取观测数据,随机选取观测数据其中的两点设为一组局内点,然后利用该组局内点确定一个直线方程模型;步骤1.2、计算观测数据中的其它点到所述直线方程模型的直线距离,如果某一点到直线方程模型的直线距离在设定的阈值范围内,则将该点判断为局内点,并统计该直线方程模型的局内点个数;步骤1.3、重新随机选取观测数据中的两点,重复步骤1.1进行迭代,得到多个直线方程模型;步骤1.4、获取每个直线方程模型下局内点的个数,选出局内点个数最多的直线方程模型,即为最佳直线方程模型。
一种具有高稳定度性能的GNSS驯服时钟方法[发明专利]
![一种具有高稳定度性能的GNSS驯服时钟方法[发明专利]](https://img.taocdn.com/s3/m/b5d091f36bd97f192379e9c7.png)
专利名称:一种具有高稳定度性能的GNSS驯服时钟方法专利类型:发明专利
发明人:蒙艳松,雷文英,严涛,王国永,边朗,胡家裕
申请号:CN201810623464.6
申请日:20180615
公开号:CN108646543A
公开日:
20181012
专利内容由知识产权出版社提供
摘要:一种具有高稳定度性能的GNSS驯服时钟方法,通过下述方式实现:对四颗以上的卫星的载波多普勒进行测量,估计本地时钟与GNSS卫星时钟的频偏;对上述得到的频偏进行滤波;用滤波后的频偏控制本地时钟的压控晶振或数字控制振荡器以修正本地时钟的频偏。
本发明相比于GNSS卫星1PPS与接收机1PPS比对的方法,其驯服后的时钟具有更优的准确度和稳定度。
申请人:西安空间无线电技术研究所
地址:710100 陕西省西安市西街150号
国籍:CN
代理机构:中国航天科技专利中心
代理人:庞静
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
gps时钟驯服晶振在南京大学成功案例
2017年10月初,西安同步电子科技有限公司自主研发生产的gps 时钟驯服晶振在南京大学投入使用,这套驯服晶振已稳定运行数月,已将我公司纳为合格供应商。
一、时钟驯服晶振简介
时钟驯服的基本原理是利用卫星授时接收机提供的固定频率信号,与本地振荡器产生的振荡信号进行比对,获得频率差;再通过对本地振荡器的调节,使振荡频率与卫星的振荡频率基本一致,在频率调整过程中,还需要对本地振荡器的相位进行补偿,使本地振荡器输出的分频秒信号与接收机输出的秒信号差值在一定范围内.卫星授时接收机由于信号传输距离长,易受干扰等特点,其输出的1pps 具有一定的抖动,秒信号包含多种误差成分,如:卫星时钟误差:星历误差:电离层的附加延时误差:对流层的附加延时误差:多路径误差:接收机本身的误差。
采用GPS授时接收机对高稳晶振进行升级改造,研制高精度时间间隔计数器电路,测量GPS平均秒和高稳晶振分频秒之间的时差,采用驯服算法计算晶振的实时准确度,并通过电子频率控制的方式反馈调整高稳晶振的频率信号,从而提高频率信号的准确性和稳定性。
二、GPS驯服晶振
利用高精度的时间间隔测量方法测得GPS信号和本地秒信号的相位差,并经计算机处理后转换成频率差,然后通过高稳晶振的压控调谐对高稳晶振输出频率进行调整,由锁相环回路进行控制使高稳
晶振锁定到GPS时钟的准确度,从而完成对高稳晶振的驯服校频过程。
对输入本地频标和GPS秒脉冲信号的鉴相,通过高精度时间间隔测量,测量出两信号的相位差,并将转换为电压值。
然后通过压控OCXO端口对高稳晶振进行压控调整,通过锁相环使本地频标锁定到GPS时钟上。
影响误差分析
其中主要影响是GPS引入误差。
又可分为以下几方面的误差:
1.1与GPS卫星相关的误差
1.1卫星星历误差
卫星星历误差是指卫星星历给出的卫星空间位置和卫星实际位置间的偏差,由于卫星空间位置是由地面监控系统根据卫星测轨结果计算求得的,所以又称为卫星轨道误差。
它是一种起始数据误差,其大小取决于卫星跟踪站的数量及空间分布、观测值的数量及精度、轨道计算时所用的轨道模型及定轨软件的完善程度等。
它是GPS测量的重要误差来源。
1.2卫星钟差
GPS卫星钟时间与标准时间之间的误差。
主要起因于钟漂移、漂移预测偏差、卫星信号通道延迟及地面控制部分的检测与校正偏差等的综合结果。
1.3卫星信号发射天线相位中心误差
1.4相对论效应的影响
卫星钟和接收机所处的状态(运动速度和重力位)不同引起的卫星钟和接收机钟之间的相对误差。
2.与传播路径相关的误差
2.1电离层折射
当GPS信号通过电离层时,电离层中大量的自由电子和正离子使其传播路径发生改变,影响GPS信号的传输速度和时间。
2.2中性层折射
由于对流层和平流层不同的物理特性,GPS信号在穿过其中时也会发生传播路径的改变,从而使测量距离产生偏差。
3多路径效应
测量站周围的反射物所反射的卫星信号(反射波)进入接收机天线将和直接来自卫星的信号(直接波)产生干涉,从而使观测值偏离,产生所谓的“多路径误差”。
当接收机天线除接收到卫星发射的信号外,还收到天线周围地物一次或多次反射的卫星信号时,两种卫星信号叠加,将会引起测量参考点位置的变化,从而使观测产生误差。
这种误差随天线周围反射面的性质而异,难以控制。
目前一般通过选择合理的天线位置避免多路径效应的影响。
3.1与接收设备有关的误差
3.1.1接收机钟差
GPS接收机一般采用高精度的石英钟,接收机的钟面时与GPS标准时之间的差异称为接收机钟差。
3.1.2接收机的位置误差
接收机天线相位中心对测量站标石中心位置的误差叫接收机的位置误差。
3.1.3接收机天线相位中心偏差
gps驯服时钟产品
SYN3102A型低相噪铷原子钟频率标准采用小尺寸封装,直流供电,只需要6分钟即可以快速锁定,采用先进的滤波技术实现较高的二三次谐波抑制,去除各种环境影响实现超低的相位噪声和优秀的杂波抑制,具有简单的数字频率调节功能,只需要通过串口发送指令即可以实现精密准确度调节,锁定指示灯更是方便用户判断铷钟工作状态。
最重要的一项功能就是实现高精度驯服功能,只需要外部输入1PPS信号即可以实现高精度驯服功能,当断开外部参考时具有超高的保持能力,
产品功能
1)提供1路超低相噪的10MHz正弦信号;
2)可通过串口数字调节频率准确度;
3)1PPS输入输出同步驯服功能;
gps驯服晶振意义
对于GPS接收机,其产生的接收机1PPS由内置普通晶振产生。
晶振独立产生秒脉冲(以下称本秒),本秒的相位会随其老化特性而逐渐漂移。
而接收机内部,存在一个反馈,通过每秒或者更高的速率将本秒与GPS卫星CA码进行实时比对,计算本地秒与GPS秒的相位差,并利用接收机内部NCO或DDS进行相位调整。
最终输出的接收机1PPS 即利用调整后的10M(接收机内部实际频率不一定为10M,但原理一致)产生。
由于存在相位调整,故接收机1PPS的长期相位特性与内置普通晶振的长期漂移特性不再相关,取而代之与GPS卫星时间直接相关,因此,可利用其长期稳定的特性对晶振进行驯服。
结束语
利用GPS信号完成对高稳晶振的锁定,解决了准确度降低和长期稳定性能差的问题,输出高精度的频率基准和时间同步信号,为各项任务提供更准确、可靠、精度更高的时间频率信号。