abb组态教程5-软件安装
ABB常用笔记
ABB常用笔记1ABB上位机加设备趋势1.将上位画面最大化---右建系统画面建---系统组态---D1---D5(LOGGROUQ)---OPEN NETORK11 NODE40---选1个空----LOG---EDIT---键入要加设备的名称---四段时间要分别键入,键第1个时要选ACTIV ATION2.系统组态---D8(MAINTENANCE)---D8(LOG DATABASECONFIG)---FILE---ACTIV ATION选相应的站---FILE----COMPUT DATABASE(M-D)以从下位提取数据,需要一定的时间。
FILE---PUBLISH DATABASE CHANGE趋势就做完了2ABB重新建站1.例如建20站,将C:\PROJ\JD\MG20中的DBDATA PADATA SRCE三个文件复制到其他盘2.在APPLICATION BUILDER中删除MG20(程序中要转入其他的站否则无法删除)3.在APPLICATION BUILDER中选FILE---NEW---NODENAME:MG20NODE TYPE:MP200/1 40A V AILABLE:全选NET NODE:11,204.再将复制的文件放到新建20站文件夹即可主要用于某站点打不开3更换AI点画面更改方法1.下位换完点后---最大对话---系统画面键----系统组态---D8---D6输入密码“OBJREF”---LIST---NODE输入相应的站点如10 (应选为SPECIFIED)在输入站名—OK---选中相应的设备号---移除----FIND----输入名称-----SEARCH说明:移除后查找相当于画面刷新一次,AS1与AS2步骤相同。
否则一半有显示一半无显示4ABB程序安装1.现场检查下位站CPU状态,板子上有状态指示正常为P1,组态为P2故障状态有故障代码2.按“INT”3.状态旋钮打至“clear”4.按“int”5.状态旋钮打至“auto”6.cpu板子指示变为“P2”说明下位恢复正常需进行上位操作7.进入故障站点(现场成P2状态才可以进入)8.LOAP KN--(KN—在C:/PROJ/JD/NODES/MG20/SRCE目录下面的KN开头最新文件)9.提示向下位灌程序时输入Y将会出现进度10.待程序灌完会,输入“DICOFIG”,将下位转成运行状态,下位显示“P1”5加一个新板子,如AI51.找一个同型号的板子如AI42.#DUDBS SRCE AI5,SEL=AI4进行复制,用RAS100文本编辑打开3.修改文本中的内容(管脚清空,名称清空,改为SPACE备用)4.#TRDSS SRCE=AI5.015.#MDB AI5查看数据库6ABB加报警改声音1.报表电脑必须打开两个文件:a 启动ABB工作站----operator work place---openb 在打开的operator work place景点打开A1,A2,A3a b必须同时运行外面才有报警2. 声音报警分4种2声bb.wan 3声bbb.wan 4声bbbb.wan 5声bbbbb.wan3 改变报警声音a启动ABB工作台---plant explorer workplaceb library structurec alarm event configuration----MB300 default configuration alarm&event configd MB300 default alarm linee 点priorities---sound选中一个如bbb.wan---browse(或把bb.wan改为bbbb.wan)---apply7 备份(恢复)上位画面和数据1 hummingbird connectirity v7.11/host explorer/ftp for window explorer 进入window文件夹环境,右击选NEW FTP profile填HOST:192.36.66.1 (或192.36.66.2)USER NAME:rootPassword:abbocs确定生成一个电脑图标,2.双击电脑图标,可以看到操作站中以wind ow模式出现的文件夹3. 双击disks/data /customer/OS/display(画面备份),复制display文件夹,将其粘贴到本机E/displaybak文件夹下(如果没有可自己新建一个),大约10分钟的时间。
ABB IRC5和RobotStudio使用入门
版本号 -
A B C D E
说明
用文档号 3HAC 021564-001 替换手册。 与 RobotWare 5.08 版配套发布。
已添加波兰语翻译。
RobotStudio Online 集成在 RobotStudio 中。标题已调整。
有关 RobotStudio 安装和许可授权的更新信息。
以有关安装 RobotStudio 的信息更新了所有系统的常用步骤 第 13 页 一节。
手册使用
本手册包含在完成物理安装后首次启动 IRC5 机器人控制器时的指示说明。
本手册的阅读对象
本手册面向: • 调试人员
操作前提
读者应该熟悉的内容: • 机器人硬件的机械安装。 • 受过机器人操作方面的培训。
本手册内容假定所有硬件 (操纵器、控制器等)均已正确安装并互相连接妥当。
各章结构
本手册由以下各章组成:
此步骤详细介绍如何使用单一机器人系统。
操作
参考信息 / 图示
1. 机械安装机器人和控制器,并连接其间的电气电源 电缆和信号电缆。 同时连接电气电源。
2. 确保已正确进行所有安全相关连接。
3. 将 FlexPendant 连接至控制器。
这些操作步骤分别在机器人和控 制器的产品手册中详述。
请参阅工作站接线图。
RobotStudio 分为以下两种功能级别:
• 基本 - 提供用于配置、编程和运行虚拟控制器的选定 RobotStudio 功能。它 还包括多项联机功能,用于对通过以太网连接的真实控制器进行编程、配置和 监控。
3. 在连接安全信号电缆之前,请根据要连接 的 Drive Module 数目从连接器 X7、X8、 X14 和 X17 移除跳线。 如图所示,将各 Drive Module 的安全信号 电缆连接到 Control Module 配电板。
ABB DCS详细图文组态教程
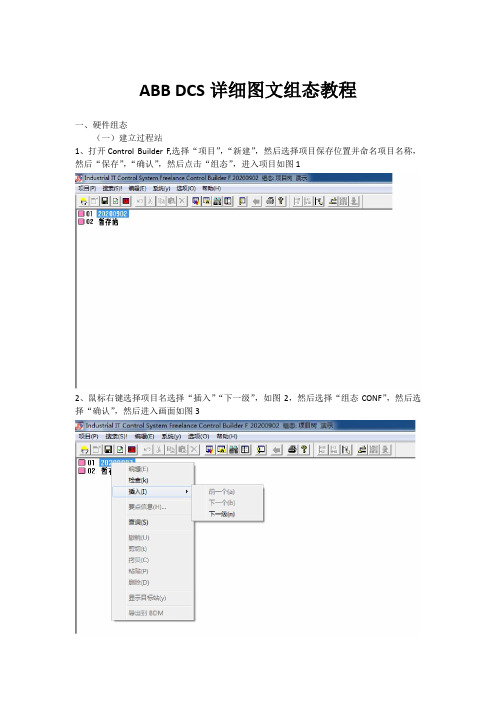
ABB DCS详细图文组态教程一、硬件组态(一)建立过程站1、打开Control Builder F,选择“项目”,“新建”,然后选择项目保存位置并命名项目名称,然后“保存”,“确认”,然后点击“组态”,进入项目如图12、鼠标右键选择项目名选择“插入”“下一级”,如图2,然后选择“组态CONF”,然后选择“确认”,然后进入画面如图33、鼠标右键选择项目名选择“插入”“下一级”,如图4,然后选择“过程站D-PS”如图5,然后选择“确认”;此时打开了“组态:过程站D-PS”对话框,然后点击“确认”如图6(命名最多4个字符,数字或字母,此例子中过程站命名为lim),建完后如图74、鼠标右键选择过程站名称(lim USRTask 任务列表)选择“插入”“下一级”,如图8,选择“任务TASK”,如图95、鼠标右键选择limUSERTask(任务),然后选择“插入”,“下一级”,然后选择“程序列表PL”如图11,然后确认;6、右键选择“limUSERTASK (PL)”,然后选择“插入”、选择“下一级”,然后选择“FBD 程序FBD”,如图12,然后选择确认后如图13;此时可以双击“limUSERTASK (FBD)”,进入,可以在页面内用功能块编程(二)建立操作员站1、选择过程站名称右键“lim(D-PS)”,(本例中过程站名称为lim(D-PS)),然后选择“插入”,选择“下一个”,如图21,然后选择“操作员站D-OS”如图222、右键选择llm(D-OS),然后选择“插入”,选择“下一级”,然后选择“图形显示FGR”,如图23,然后选择“确认”;此时可以双击llm(FGR)(操作员站名称,本例中操作员站名称为llm),进入,然后进行画面组态;(三)建立趋势网关站1、选择过程站名称右键“lim(D-PS)”,(本例中过程站名称为lim(D-PS)),然后选择“插入”,选择“下一个”,然后在“对象对话框”中选择“网关站D-GS”,如图31,然后在“组态:网关站D-GS”对话框中的“网关类型”中选择“TRN网关”,其余不变如图32(四)插入硬件1、点击页面上部菜单栏“硬件结构”,如图41,进入之后然后选择页面左部HWSYS(HWSYS),右键选择“插入”后如图42,之后选择“AC800F”控制器,如图43,之后鼠标点击“AC800F(AC800F1)”,之后在整个页面右部出现硬件组态的底板,现在我们开始按照已经安装好的硬件插入不同的模件,进行硬件组态。
ABB_AC500软件培训教程(中文)
在右侧窗口中 展开PDP22-FBP,可以看 到添加的I/O模块
通过FBP进行分布式扩展(Profibus DP)
选中每个模块,在下面的窗口中选择 每个字节的输入/输出,点击右键,选 择Create varialbe创建变量
通过FBP进行分布式扩展(Profibus DP)
用户界面—标题栏
新建工程:新建一个工程。 打开工程:打开一个工程或从PLC上载一个工程。 保存:保存工程文件。 运行:启动登录程序的运行。 停止:停止程序的运行。 跳过:单步执行程序,程序在执行之后停止。“跳过” 命令遇到功能块或函数时,会跳过功能块执行下一条语名。
退出:退出调试状态,回到程序编写状态。 全局查找:查找所需目标。 剪切:将选中的部分剪切到剪贴板。 复制:将选中的部分复制到剪贴板。 粘贴:将剪贴板中的部分粘贴到当前窗口。 查找:在当前窗口查找所需目标。 查找下一项:查找下一个目标。
用户界面—信息窗口及状态栏
信息窗口 信息窗口位于编辑器的下方,用于实时显示程序编译、错误、警告中 比较的消息,双击消息窗口中的任一条消息,可以自动跳到编辑器中的相关行 ,以便查找到相关信息,通过“编辑/下一个错误”和“编辑/前一个错误”命 令可以在错误消息中快速跳转。当“窗口”下拉菜单里“信息”选中时,则消息 窗口打开,否则消息窗口关闭。
Ethernet������
ARCNET
Couplers通讯配臵二:扩展通讯模块
选择Couplers,点击右键������ 通过添加子元件,选择相 应的通讯模块 PROFIBUS DP������ Ethernet������ CANopen������ DeviceNet 计数模块DC541
通过FBP进行分布式扩展(Profibus DP)
Abb-robotstudio安装教程

Abb robotstudio安装教程
1、各个版本的robot安装方式是一样的。
2、解压安装包
3、
4、选择语言为中文
5、
6、选择安装产品
7、
8、首先安装
robotware
9、点击下一步
10、点击下一步
11、在选择安装路径时只需要把C改为D就可以了。
12、安装robot完毕后安装robotstudio回到初始界面
13、
14、安装robotstudio
15、点击下一步
16、下一步
17、将路径的C改为D,方法如上
18、64位windows系统会出现两个图标,
19、可以同时使用
20、32位系统只有一个图标,还是正常使用。
21、打开软件点击选项
22、点击授权
23、查看软件使用到期时间。
24、关闭软件,破解开始。
25、在开始下输入regedit回车
26、进入注册表编辑器
27、
28、在这里32位系统和64位系统注册表文件路径有所不
同,现在以64位系统为例
29、
30、
31、
32、
33、双击打开后进入编辑
34、
35、破解完毕打开robot
36、选项---》授权- 查看已安装许可证
37、时间变为2029年破解成功.
38、注意:32位系统没有此步骤直接跳到下
一步。
ABB机器人仿真软件安装.

2、点击RobotWare
二、安装RobotWare
3、选择完整安装,点击下一步,然后点击安装,等待安装完成
三、安装RobotStudio
1、点击RobotStudio
三、安装RobotStudio
2、选择完整安装,点击下一步,然后点击安装,等待安装完成后退 出向导。
职业教育机电一体化专业教学资源库 南京工业职业技术学院 工业机器人虚拟实训
ABB工业机器人仿真软件安装
ABB RobotStudio
职业教育机电一体化专业教学资源库 南京工业职业技术学院 工业机器人虚拟实训
主要任务
1.下载RobotStudio软件
2. RobotStudio的正确安装
下载Robotstudio的方法
1.从机器人伙伴网站下载 2.从ABB机器人官方网站下载 3.从机器人随机光盘中获得
ABB Robotstudio的安装过程
1.安装前的准备工作
2.安装RobotWare
3.安装RobotStudio
一、安装前的准备工作
1、下载完成后,对压缩包进行解压缩 2、解压缩后,打开文件夹 3、双击打开Launch 4、在下拉菜单中选择语言
二、安装RobotWare
ROBOTSTUDIO FOR IRC5 V5.06说明

Put LicenseManager.dll to:
"X:\安装目录\Common Files\ABB Industrial IT\Robotics IT\Licensing\"
具体方法如下:
点“我的电脑”->属性 -> 高级-> 环境变量-> 系统变量-> 新建以下变量:
变量名:LSERVRC
变量值:X:\安装目录\Common Files\ABB Industrial IT\Robotics IT\Licensing\lservrc
以上的X:\安装目录\要看你自己的安装路径。搞定。有什装参考(默认目录的安装):
Install RobotStudio 5.06
Put lservrc to:
"C:\Program Files\Common Files\ABB Industrial IT\Robotics IT\Licensing\"
安装说明:
1:BIN CUE为镜像文件,请安装Alcohol 120%等虚拟光驱工具载入它们,打开,安装。
2:安装RobotStudio 5.06
3:如果是默认文件夹安装,则将Crack下的Program Files整个同名覆盖就行了。
如果不是默认文件夹安装,则将
Put lservrc to:
You may also need to set environment variable
LSERVRC to
"C:\Program Files\Common Files\ABB Industrial IT\Robotics IT\Licensing\lservrc" (no quotes)
ABB过程单元组态Composer

ABB Automation University
Composer Page 16
第四章
建立新项目
Back
Add a controller
控制器的作用 ”role” 非常重要, 有如下三种情况: • 单个控制器 – 对单个控制器,其作用 “role” 应组态为 “Primary”。在项目结构中只 增 加一个控制器。 • 两个控制器 – 对冗余配置的但不允许进行在线组态的控制器(如对燃烧过程或核电 厂等场合),其作用 “role” 应组态为 “Primary/Redundant”。在项目 结 构中只增加一个控制器。 • 两个控制器 – 对冗余配置的并允许进行在线组态的控制器,两个控制器都要增加到 项目结构中。对主控制(逻辑地址为n)其作用 “role” 应组态为 ”Primary”,备份控制器(逻辑地址为n+1)其作用“role” 应组态为 ”Backup w/Online”。 当控制器在线时,固件版本 (Firmware revision) 将会自动设置。 控制器的标识(ID)一般由两个字母组成。在一个项目中控制器的标识应唯一。对 冗余配置的并允许进行在线组态的控制器,两个控制器的标识必须相同。
过程单元组态/Composer
ABB Automation University
Composer Page 1
过ቤተ መጻሕፍቲ ባይዱ单元组态/Composer
第一章 – Composer 概述 第二章 – Composer 软件的安装
第三章 – Composer 的结构
第四章 - 建立新项目 第五章 - 通信组态 第六章 - 自动化建筑师 第七章 - 编译、下装、存盘、校验及浏览组态 第八章 – 监视与趋势第八章 第九章 – 块地址管理实用程序 第十章 - 在线组态 监视与趋势
工业机器人工作站安装与调试(ABB)课件第5篇
(3)夹具的电路及气路安装
1)把吸盘夹具弹簧气管与机器人四轴集成气路接口连接。
2)把真空发生器、机器人一轴集成气路接口、电磁阀之间用合 适的气管连接好,并用扎带固定,如图6-3所示。
3)把电磁阀的电路与集成信号接线端子盒正确连接,如图9-5所 示。注:PLC控制柜内的配线已经完成,接线端子盒YA08端子已连接 至机器人I/O板DSQC 652的DO16通道。因此在PLC控制柜面板模 式
3)选择合适型号的内六角扳手把码垛套件从套件托盘上拆除。
(2)工作站安装 1)选择合适的螺钉,把码垛套件安装至机器人操作对象承载平台的 合理位置(可任意选择安装位置和方向)。码垛布置图如图9-3所示。
图9-3 码垛布置图
2)夹具安装:首先把夹具与机器人的连接法兰安装至机器人六轴法 兰盘上,如图9-4所示,然后再把吸盘夹具安装至连接法兰上。
图9-8 码垛工作站控制流程图
主程序如下所示:
拾取工件子程序如下所示:
放置工件子程序如下所示:
位置处理子程序通过CASE语句和Offs语句列出了16个拾取和放 置的位置,程序如下所示:
4.示教目标点
完成坐标系标定后,需要示教基准目标点。在此工作站中,需要示 教原位点“pHome”、拾取工件基准点“pickBase”、拾取工件 基准点“pickBase_2”、放置工件基准点“placeBase”、放置工 件基准点“placeBase_2”。在例行程序中有专门用于示教基准目 标点的程序Path_10(),在程序编辑器菜单中找到该程序。
本工作站以多种形状铝材物料码垛为例,利用IRB 120搭载真空吸 盘,配合码垛工装套件实现对拾取物料块进行各种需求组合的码垛过 程。本工作站中还通过RobotStudio软件预置了动作效果,在此基础上 实现I/O配置、程序数据创建、目标点示教、程序编写及调试,最终完 成物料码垛应用程序的编写。通过本章学习,使读者掌握工业机器人 在码垛工作站应用的编写技巧。码垛工作站布局如图9-1所示。
使用指南ABB

04
维护保养与故障排除方法
日常维护注意事项
01
02
03
04
保持设备清洁
定期清理设备表面和内部灰尘, 避免杂物堆积影响散热和运行。
检查紧固部件
定期检查设备各部件的紧固情 况,如有松动应及时拧紧。
润滑保养
对设备的滑动部位和轴承进行 定期润滑,确保运行顺畅。
定期检查电气系统
检查电线、电缆、开关等电气 部件是否完好,如有破损应及
常用功能模块介绍
01
文本编辑模块
提供丰富的文本编辑功能,包 括字体、字号、颜色、对齐方 式等设置,支持撤销、重做等
操作。
02
图像处理模块
支持图像的插入、编辑、裁剪、 缩放等功能,可以满足用户对
图像的各种处理需求。
03
表格制作模块
提供多种表格样式和编辑功能, 支持表格的合并、拆分、排序
等操作。
04
幻灯片制作模块
支持幻灯片的创建、编辑和演 示,提供多种幻灯片切换效果
和动画效果。
高级设置选项
自定义快捷键
用户可以根据自己的使用习惯, 自定义各种操作的快捷键。
模板管理
提供多种模板供用户选择,并支 持模板的自定义和保存。
插件扩展
支持插件的扩展和安装,用户可 以通过安装插件来增加软件的功 能。
偏好设置
提供多种偏好设置选项,如界面 风格、语言设置、文件关联等, 方便用户根据自己的需求进行设
优化设备性能
根据实际运行情况,对设备参数进行调 整优化,提高设备性能和稳定性。
03
操作界面及功能介绍
主界面布局及操作说明
01
界面布局
02
操作说明
主界面采用直观、简洁的设计风格,包括菜单栏、工具栏、导航栏和 工作区等部分。
ABB过程单元组态Composer
ABB Automation University
Composer Page 12
第三章
Composer 的结构
Back
Composer 的窗口结构
Output 窗口
输出窗口位于Composer窗口的底部, 该窗口提供了Composer应用程序所有 操作的文本反馈信息。在输出窗口中 有5个选项按钮。这些选项按钮将文本 信息分组管理,从而便于对特定信息 的查询。
Add a Control Unit
Add a Console Add a HAC Add a SEM
Add a controller
Add a Control Logic Document Add a Display Group to a
Console (for C-VMS) Add Lists to Project
ABB Automation University
Composer Page 17
第五章 - 通信组态
概述
ABB Automation University
Composer Page 18
第五章 - 通信组态
概述
Composer 软件有两种服务器: • Configuration Server – 控制Composer所有的资源库及数据库; • Communication Server – 将 Composer 连接到 Control Network。
ABB Automation University
Composer Page 16
第四章
建立新项目
Back
Add a controller
控制器的作用 ”role” 非常重要, 有如下三种情况: • 单个控制器 – 对单个控制器,其作用 “role” 应组态为 “Primary”。在项目结构中只 增 加一个控制器。 • 两个控制器 – 对冗余配置的但不允许进行在线组态的控制器(如对燃烧过程或核电 厂等场合),其作用 “role” 应组态为 “Primary/Redundant”。在项目 结 构中只增加一个控制器。 • 两个控制器 – 对冗余配置的并允许进行在线组态的控制器,两个控制器都要增加到 项目结构中。对主控制(逻辑地址为n)其作用 “role” 应组态为 ”Primary”,备份控制器(逻辑地址为n+1)其作用“role” 应组态为 ”Backup w/Online”。 当控制器在线时,固件版本 (Firmware revision) 将会自动设置。 控制器的标识(ID)一般由两个字母组成。在一个项目中控制器的标识应唯一。对 冗余配置的并允许进行在线组态的控制器,两个控制器的标识必须相同。
离线组态软件安装手册(STEP7 V5.5)

ABB DCS 系统
Freelance V9.2 离线组态软件安装手册
图9
10. 选择“典型的”安装模式,可修改安装路径,继续安装,点击下一步。
图 10
11. 选择 STEP7 软件语言,点击下一步。
11/12
ABB DCS 系统
Freelance V9.2 离线组态软件安装手册
这里暂不安装授 权选择“否”
3. 安装步骤
安装步骤中如果没有特殊提示,可按照系统默认或点击下一步、确定按钮继 续安装。
3.1. 准备工作
1. 修改计算机名称; 2. 退出正在运行的病毒保护或其它驻留内存的程序;
11/12
ABB DCS 系统
Freelance V9.2 离线组态软件安装手册
3.2. 安装 1. 运行安装光盘自动进入 STEP7 安装向导
选择版本语言 图1
2. 选择安装的版本语言,点击下一步继续安装。
点击下一步继续 安装
图2
11/12
ABB DCS 系统
3. 点击下一步。
Freelance V9.2 离线组态软件安装手册
图3
4.默认选定,点击下一步。
点击选定 图4
11/12
ABB DCS 系统
Freelance V9.2 离线组态软件安装手册
西门子 PLC 系统 STEP7 V5.5 SP2 离线组态软件
安装手册
编制: 审核:
日期:
工程开发部
ABB DCS 系统
Freelance V9.2 离线组态软件安装手册
目录
参考 .......................................................................................................................................................... 3 1. 运行环境..........................................................................................................................................3
工业机器人应用技术ABB项目二工业机器人离线编程概述及软件安装
工业机器人离线编程概述及软件安装xx年xx月xx日•工业机器人离线编程概述•工业机器人离线编程软件安装•工业机器人离线编程应用案例•工业机器人离线编程常见问题与解决方案目•工业机器人离线编程未来发展趋势录01工业机器人离线编程概述工业机器人离线编程是一种在计算机上使用专门的软件,根据机器人实际工作环境和任务需求,对机器人进行程序编写、调试和优化的方法。
主要特点包括:提高编程效率、降低现场调试成本、增强安全性、改善工作环境等。
定义与特点工业机器人离线编程的历史与发展20世纪90年代,工业机器人离线编程技术开始得到广泛应用,并出现了许多成熟的商业软件产品。
近年来,随着人工智能、云计算、物联网等技术的不断发展,工业机器人离线编程技术也在不断进步和完善。
20世纪80年代初,随着计算机技术的飞速发展,人们开始尝试在计算机上对机器人进行编程。
提高编程效率、降低调试成本、增强安全性、改善工作环境等。
优势不能完全取代现场调试、需要专业技术人员操作、对机器人硬件和软件有一定要求等。
局限性工业机器人离线编程的优势与局限性02工业机器人离线编程软件安装为保证离线编程软件的正常运行,需要具备至少8GB内存、1TB硬盘和高速CPU的计算机。
软件安装环境需求PC硬件配置一般要求Windows 7或更高版本的操作系统,且需要具备网络连接和USB接口。
操作系统需要安装Microsoft .NETFramework 4.6或更高版本,以及必要的编程和编辑软件。
其他软件软件安装步骤与操作说明从官网下载安装包,根据提示完成软件的安装。
启动离线编程软件,并进行相关参数设置,如通信端口、波特率等。
插入机器人控制器与计算机连接的USB电缆,并按照提示完成驱动程序的安装。
根据机器人控制器的型号和规格,选择相应的机器人模型并加载到软件中。
软件界面介绍与功能概述软件主界面离线编程软件的主界面主要包括菜单栏、工具栏、图形界面和状态栏等。
要点一要点二功能模块离线编程软件的功能模块主要包括机器人建模、轨迹规划、仿真模拟、程序编辑和后置处理等。
abb机器人硬件安装手册
© 版权所有 2013-2015 A B B 。保留所有权利。
本手册中包含的信息如有变更,恕不另行通知,且不应视为 A B B 的承诺。 A B B 对本手 册中可能出现的错误概不负责。 除本手册中有明确陈述之外,本手册中的任何内容不应解释为 A B B 对个人损失、财产 损坏或具体适用性等做出的任何担保或保证。 A B B 对因使用本手册及其中所述产品而引起的意外或间接伤害概不负责。 未经 A B B 的书面许可,不得再生或复制本手册和其中的任何部件。 可从 A B B 处获取此手册的额外复印件。 本出版物的原始语言为英语。所有其他语言版本均翻译自英语版本。
RobotStudio 用户界面 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 主窗口 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 在线帮助 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 菜单条 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 控制器浏览器 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 图像采集和配置区域 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 胶卷 ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 调色板窗口 ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 上下文窗口 ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Options(选项)对话框 ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 电子表格视图 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
abb组态教程5-软件安装(PPT文档)
Training System Software Install
© ABB - Pa软件全新安装准备工作 CBF 软件升级安装准备工作 CBF 软件安装 CBF 软件配置
© Copyright year ABB - 2 -
•拨码开关为F:冗余切换专用地址; •拨码开关为0:IP地址通过系统管 理员指定,规则同PC机;
•按该按钮进行DNS及WINS选项检查
安装准备
DNS 及WINS设置
© Copyright year ABB - 10 -
•使用系统默认设置
安装准备
使用主机名称
© Copyright year ABB - 11 -
安装准备
网络及IP地址设定
•TCP/IP 是系统使用唯一网络协议
•使用定制IP地址,并建议设置如下: •IP:172.16.X.Y •子网地址:255.255.240.0 •X:0…15 •Y:0…255 •控制器IP 设定:
•拨码开关不是0: •IP: 172.16.1.X •X: 拨码位置1…14 •子网地址:255.255.240.0
•定义地址可以使用主机名称代替IP地址; •必须要在系统内设定; •系统文件路径为: •<Windows2000-directory>\system32\drivers\etc\hosts •必须为每台PC或站独立指定主机名称;
© Copyright year ABB - 12 -
安装准备
TCP/IP 检查
•FTP 服务适用于趋势及历史记录文件的远程传送; •必须在Windows 2000安装该服务; •在CBF中组态FTP应用;
安装准备
虚拟内存设置
iFIX - ABB CBM组态指南

1-J BABB AC800M 3.2与Intellution iFIX3.0组态指南曹卫锋2004/10/202-J B内容⏹介绍采用IFIX3.0作为ABB AC800M 控制系统的SCADA/HMI 软件的方案。
⏹介绍ABB OPC Server 的设置,关于CBM 的详细组态,请参考CBM 的培训课程。
⏹介绍iFIX 的OPC 配置和组态及如何实现快速批量组态。
⏹介绍iFIX 数据库组态及如何实现快速批量组态。
⏹介绍冗余服务器的设置。
3-JBAC800M/iFIX方案4-J B为什么选择OPC 作为通讯接口⏹不再需要任何驱动,即插即用,真正解决了客户在使用多种不同厂家的产品时的兼容性和互操作性问题。
⏹多个客户端可以同时和多个服务器通讯。
⏹高速性能,Server 和Client 之间的通讯速度可达20000Tags/s 。
⏹ABB AC800M 控制系统提供完善的OPC 通讯方案,跟多种HMI/SCADA 软件有大量成功的案例,如iFIX ,Intouch ,Citect等。
5-J BIndustrialIT AC800M OPC 解决方案⏹ABB 提供标准的2.0版本的OPC DA 和AE 服务器,供各种OPC 客户端访问。
⏹OPC Data Access Server 从AC800M/C 控制器采集数据,供OPC Client 访问。
⏹OPC Alarm and Event Server 提供报警和事件的OPC Server,供OPC Alarm&Event Client 访问。
对于大部分的HMI/SCADA 软件的事件和报警均在上位软件中实现,但在某些特殊情况下,比如电厂的SOE ,事件必须控制器中产生,然后通过OPC AE Server 供Client 访问。
6-J BIFIX OPC 解决方案⏹IFIX PDB OPC Client 软件名称OPC Power Tool,又称为OPC Client Driver ,既作为OPC 客户端连接第三方OPC Server,又作为第三方OPC Client 连接PDB 的中间OPC Server,产品包含在I/O Driver & OPC Server CD 中。
ABB_ 800xA硬件组态
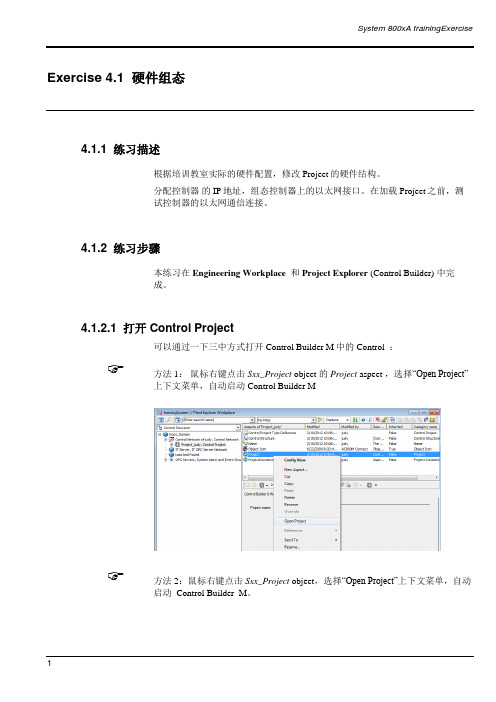
System 800xA trainingExercise Exercise 4.1 硬件组态4.1.1 练习描述根据培训教室实际的硬件配置,修改Project的硬件结构。
分配控制器的IP地址,组态控制器上的以太网接口。
在加载Project之前,测试控制器的以太网通信连接。
4.1.2 练习步骤本练习在Engineering Workplace和Project Explorer (Control Builder) 中完成。
4.1.2.1 打开 Control Project可以通过一下三中方式打开 Control Builder M中的Control :☞方法1:鼠标右键点击Sxx_Project object 的Project aspect ,选择“Open Project”上下文菜单,自动启动 Control Builder M☞方法 2:鼠标右键点击Sxx_Project object,选择“Open Project”上下文菜单,自动启动 Control Builder M。
☞方法 3:双击桌面上的Control Builder M或通过Windows开始菜单:Programs > ABB Industrial IT 800xA>Engineering>Control Builder M,手动启动Control Builder M。
Control Builder M启动后,可以从列表中打开project。
4.1.2.2 在Control Builder 中组态硬件结构☞修改CPU类型。
1.采用Control Builder模板时确实的AC800M控制器型号是PM860,如果实际的控制器不是PM860,右键点击CPU型号,选择“Replace With…” ,从2System 800xA trainingExercise 硬件类型列表中选择正确的控制器型号。
组态硬件结构,在适当的位置添加所需要的objects。
工业机器人工作站安装与调试(ABB)课件第3篇任务5-7
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
2)焊枪夹具安装:首先把焊枪夹具与机器人的连接法兰安装至机器 人六轴法兰盘上,然后再把焊枪夹具安装至连接法兰上。
(3)工艺要求
图5-6 工作站打包文件
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
1)在进行描图轨迹示教时,焊枪姿态尽量垂直于工件表面。 2)机器人运行轨迹要求平缓流畅。 3)焊丝与图案边缘距离0.5~1mm、尽量靠近工件图案边缘,且不能 与工件接触或刮伤工件表面。 2.工作站仿真系统配置 (1)解压并初始化 双击工作站打包文件“05_guiji.rspag”,如图5-6所示。 工作站解包流程如图5-7所示,完成后,单击“完成”按钮即可。
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
任务五 基础工作站安装与调试
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
本工作站作为基础工作站,利用IRB 120搭载焊枪配合基础学习实 训套件,实现简单轨迹、圆形轨迹、矩形轨迹等各种形状平面及空间 轨迹的绘制。本工作站中还通过RobotStudio软件预置了动作效果,接 着在此基础上实现程序数据创建、程序编写及调试、目标点示教,最 终完成整个基础工作站的轨迹编制训练。通过本章学习,掌握工业机 器人工作站轨迹程序的编写技巧。基础工作站布局如图5-1所示。
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
图5-9 选择创建系统备份
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
图5-10 创建系统备份
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
图5-11 给备份命名
第三篇 YL-399工业机器人实训装备基础应用(应用篇)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
软件基本概述
CBF 软件全新安装准备工作 CBF 软件升级安装准备工作 CBF 软件安装 CBF 软件配置
© Copyright year ABB - 17 -
Upgrading an existing version to V7
Upgrading means changing from one AC800F / Freelance 2000 version to a newer version. Notes to follow before performing an upgrade • You should check that all the project files have been exported from the “old” Control Builder F or DigiTool version. • Check that the function block parameters are documented in the project files.
© Copyright year ABB - 25 -
...\bitmaps : Bitmap files for graphics editor ...\bpr :Operation logs ...\curv: Trend archives ...\ddesrv :DDE server ...\dmsapi :Application interface ...\doc :Project documentation ...\exe :dll and exe files for DigiTool ...\export :Exported project files or parts of programs ...\gsd :Device description files ...\macros :Macros for the graphics editor ...\opcsrv :OPC server ...\proj :Project files ...\sap: Disturbance course logs ...\setctrl: Setup control ...\setups :Setup history ...\sfp :Signal sequence logs ...\wave: Wave files for alarm messages in DigiVis.
© Copyright year ABB - 7 -
安装准备
Windows 2000 Task bar 配置
•正确安装Windows 2000及SP 软件
•禁止该选项,保障DigiVis 软件的安全性
© Copyright year ABB - 8 -
安装准备
网络及IP地址设定
•TCP/IP 是系统使用唯一网络协议 •使用定制IP地址,并建议设置如下: •IP:172.16.X.Y •子网地址:255.255.240.0 •X:0…15 •Y:0…255 •控制器IP 设定: •拨码开关不是0: •IP: 172.16.1.X •X: 拨码位置1…14 •子网地址:255.255.240.0 •拨码开关为F:冗余切换专用地址; •拨码开关为0:IP地址通过系统管 理员指定,规则同PC机;
© Copyright year ABB - 9 -
•按该按钮进行DNS及WINS选项检查
© Copyright year ABB - 10 -
安装准备
DNS 及WINS设置
•使用系统默认设置
安装准备
使用主机名称
© Copyright year ABB - 11 -
•定义地址可以使用主机名称代替IP地址; •必须要在系统内设定; •系统文件路径为: •<Windows2000-directory>\system32\drivers\etc\hosts •必须为每台PC或站独立指定主机名称;
© Copyright year ABB - 22 -
软件安装
确认信息继续安装
© Copyright year ABB - 23 -
•再次确认警告信息,按Next键进入安装界面
软件安装
设置软件安装选项
•设置软件安装选项: •空:选项不安装; •灰色:选项安装;
•蓝色:选项下内容全部安装;
•黑色:选择为SP安装
•正常方式; •DEMO 方式:没有安装Hardkey,有效期100天; •紧急方式: Hardkey 出现故障,有效期 100 天;
© Copyright year ABB - 5本概述
CBF 软件全新安装准备工作 CBF 软件升级安装准备工作 CBF 软件安装 CBF 软件配置
安装内容: Engineer IT:
Control Builder F,CBF Help,FF,
Security Lock,FDT Open Communication Package: DDE,
Additional Packages:
© Copyright year ABB - 24 -
•选择安装目录
•用户名:Freelancer; •属性选项设置
• Password never expires, • User cannot alter password.
© Copyright year ABB - 15 -
安装准备
指定用户到标准用户组
操作:
Start > Settings > Control Panel > Users and Passwords > Tab: Users >Select user 'Freelancer'
Freelance 800F Training System Software Install
© ABB - Page 1
目录
软件基本概述
CBF 软件全新安装准备工作 CBF 软件升级安装准备工作 CBF 软件安装 CBF 软件配置
© Copyright year ABB - 2 -
软件基本概述
CBF 软件全新安装准备工作 CBF 软件升级安装准备工作 CBF 软件安装 CBF 软件配置
© Copyright year ABB - 21 -
软件安装
运行软件CD 自动执行文件
操作:
Explorer > Select drive > 运行 Autoplay.exe
•选择安装语言; •选择安装软件种类: •AC800F 软件;
安装准备
CBF 软件包构成
•软件安装CD; •软件钥匙狗,分为3 种类型: •Control Builder F •DigiVis •Combination (Control Builder F 与DigiVis) •软件授权软盘;
© Copyright year ABB - 4 -
安装准备
CBF 软件运行方式
安装准备
FTP 服务
© Copyright year ABB - 13 -
•FTP 服务适用于趋势及历史记录文件的远程传送; •必须在Windows 2000安装该服务; •在CBF中组态FTP应用;
安装准备
虚拟内存设置
建议虚拟内存设置为100 MBytes 操作:
Taskbar > Start > Settings > Control Panel > System
API Freelance 2000: DigiVis,DigiVis Help,DigiBrowse Unsupported Packages: Audit Trail,DXF ,Emulator
The following subdirectories are created:
> Properties > Group Membership > Standard User
•该组用户至少保留下列权限:
•Changing system time •Local login •Shutting the system down
•Access to this computer from the network
安装准备
TCP/IP 检查
•输入下列指令: •Taskbar > Start > Run > cmd [Enter] •进入DOS 命令界面 •执行PING TCP/IP 地址命令; •检查是否为正常显示信息; •检查原则: •PING 本机IP; •PING 远程PC或站IP;
© Copyright year ABB - 12 -
© Copyright year ABB - 18 -
Exporting project files from older versions as CSV-files
To
use existing projects from a former version, you must export them using your
安装准备
CBF 软件运行系统要求
•硬件环境要求: •建议 PC 技术指标: •2G Hz, 1GB RAM; •操作系统环境要求: •Microsoft Windows 2000 SP4 •加载 SP软件包网址:;
© Copyright year ABB - 3 -
old Control Builder F / DigiTool version (create *.CSV file) before starting the setup of the new software version.
1. 2. 3. 4. 5. 6. 7.
Start Control Builder F Open project Switch to commissioning mode Load parameters, select ’only different’ Correct parameters Export project (*.csv format) Finish Control Builder F