岸桥说明书
集装箱岸桥

• • • •
1、 驱动系统组成 2、 交流变频驱动的原理 3、 交流变频驱动的控制方式 交流驱动的控制方式主要有以下几种:V /F控制、电压矢量控制、速度闭环矢量 控制和直接转矩控制等。起升及小车运行 机构使用闭环矢量控制,大车运行及俯仰 机构使用 V/F控制。 • 4、 岸桥对交流驱动的特殊要求
• 五、 岸桥电气驱动和控制的基本特征 • 1、起重机向重、高、大,速度更快的方向发展 • 起升高度逐渐增高;小车行程越来越大;起升速度 越来越快;小车速度越来越快。 • 2、应该具有起升防下坠功能 • 传统的起重机当吊着重物从停止状态向上提升的 启动瞬间,总可以看到重物是先朝下坠落一点, 然后再向上提升运行。 。现代集装箱起重机电 控系统中都应具有起升防下坠功能。其基本的原 理是在每次制动器抱闸时,记录下此时的电动机 输出转矩,当下一次制动器再打开时,电动机就 会输出上一次记忆的转矩值。
• 二、岸桥的电动机 • 岸桥各工作机构的驱动目前交直流并存, 直流驱动电动机仍被大量而广泛地应用, 但随着交流变频技术的日益完善和推广应 用,应用交流变频拖动系统已呈上升趋势, 所以,交流变频电动机的应用日益增多。 • 1、起重机用电动机的基本特点 • 2、起重机用电动机的工作制 • 3、起重机用直流电动机 • 4、交流变频专用电动机
主控柜
CMS
• 5、大车I/O柜: • 装有远程I/O模块(S800),光纤通讯 收发器。地面操纵箱。
• 6、操作台、操作箱、仪表箱 • (1)左操作台 (2)右操作台
• 7、 俯仰操作箱: • 操作按钮及指示灯---俯仰停止按钮,俯仰快/慢速 选择开关,俯仰上升带灯按钮,俯仰下降带灯按钮, 俯仰停止按钮,俯仰抬钩/放钩开关,控制电源关带 灯按钮,控制电源开/复位带灯按钮,俯仰手动/自 动选择开关,紧停按钮,故障复位按钮,试灯按钮, 故障指示灯,紧停指示灯,俯仰终点停止指示灯, 俯仰紧急制动器释放指示灯,俯仰水平指示灯,俯 仰挂钩指示灯。 • 8、操作按钮及指示灯 • 状态选择开关,夹轮器夹紧/释放带灯按钮,速度选 择按钮,大车左行按钮,大车右行按钮,起升上升 按钮,起升下降按钮,控制电源关带灯按钮、控制 电源开/复位带灯按钮,紧停按钮,旁路开关,大梁 投光灯选择开关,故障复位按钮,试灯按钮,故障 指示灯,各机构及整机工作时间表等。
第三章 岸桥的基本参数和主要技术数据

第三章岸桥的基本参数和主要技术数据岸桥的基本参数描述了岸桥的特征、能力和主要技术性能。
基本参数主要包括几何尺寸、起重量、速度、控制与供电、防摇要求和生产率等。
第一节几何尺寸参数几何尺寸参数是表示岸桥作业范围、外形尺寸大小及限制空间的技术数据,主要有以下8个参数;外伸R 0轨上/轨下起升高度H u /H d轨距S联系横梁下净空高度 C hp后伸距R b门框内净宽 C wp基距 B 岸桥(大车缓冲器端部之间)总宽W b 此外,还有门框下横梁上表面离地高度h s、门框外档宽度W p、前大梁宽度B b或小车总宽B t;、梯形架顶点高度H0、仰起后岸桥总高H s、前大梁前端点离海侧轨道中心线的水平面距离L 0、后大梁尾端离陆侧轨道中心线的水平面距离L b、前大梁下表面离地高H b、缓冲器安装高S b,岸桥与船干涉限制尺寸S f、S h、α,以及岸桥与码头固定设施或流动设备干涉的限制尺寸C1、C2、C3、C4、C5等等。
尺寸参数示意图如图3-1-1所示。
一、外伸距R 0小车带载向着海侧运行到前终点位置时,吊具中心线离码头海侧轨道中心线之间的水平距离,称为外伸距,用R 0表示。
图3-1—2为岸桥外伸距示意图。
外伸距是表示岸桥可以装卸船舶大小的主要参数。
它受到船宽(甲板上集装箱排数)和层高,船的横倾角α、船舶吃水、码头前沿(岸壁至海侧轨中心线之间)的距离F.码头防碰靠垫(也称护舷)的厚度f 以及预留小车制动的安全距离等因素的影响。
岸桥的外伸距除应考虑船宽外,还应考虑船倾斜的影响,因而它与装载的集装箱层高有关。
超巴拿马型岸桥的外伸距是以能装卸超巴拿马集装箱船(宽度32.3 m以上)为标志的。
世界各国码头前沿距离F和碰靠垫厚度f各不相同,F min=2m,F max=7.5 m,f min=0.6 m,f=2.0 m。
超巴拿马型船宽从14排起至22排不等,因此,超巴拿马型岸桥的外伸距也各max不相同。
通常,码头前沿F=3 m,碰靠垫f=1.5 m,14排箱的船宽为35m,甲板上5层箱横倾3°的增量约1.5 m,R 0=3+1.5+(35-1.25)+1.5,R 0≈40 m。
岸桥概述
岸边集装箱起重机(简称岸桥)/hongjingfen/blog/item/0ce9fa454d7b313986947381.html集装箱运输船舶的大型化、特别是超巴拿马船型的发展,对岸边集装箱起重机提出了更新更高的要求:一是提高起重机的技术参数,起重机速度参数高速化,外伸距、起升高度增大;吊具下额定起重量提高;二是开发设计高效率的岸边集装箱装卸系统,以满足船舶大型化对起重机生产率的要求。
其实国外几家公司对岸边集装箱起重机控制技术也都很重视,有的还申请了专利文献,如三菱重工业株式会社的“装卸用起重机中的集装箱位置检测方法及装置、及集装箱着地、摞放控制方法”的专利(专利号:EP1333003 A1;申请日:2000.10.27)。
在通过处理从设置在吊具上的CCD等的摄像装置获得的对象集装箱的图像数据,可以高精度确实地进行对象集装箱与悬吊集装箱的相对位置检测。
德国西门子公司SIEMENS AG (DE)的专利(专利号:DE10107048;申请日:20010213)。
涉及了一种集装箱起重机装卸的方法,也适用于集装箱船。
在起重机驾驶室中采用带有监视器的PC机,通过触摸屏操作,根据预先设定的值能使起重机自动达到预期目标。
石川岛播磨重工业株式会社ISHIKAWAJIMA HARIMA HEAVY IND的“集装箱起重机”专利(专利号:JP62157189;申请日:1985.12.27)。
起重机包括集装箱运送装置、测量装置能测船上集装箱水平和垂直位置和控制装置根据测到的集装箱位置数据计算出集装箱运送装置的运动路线来控制集装箱运送装置的运动。
HITACHI LTD (JP)株式会社日立制作所的“集装箱起重机”专利(专利号JP10-324493;申请日:1997.5.23)。
在沿横梁和起重臂移动的三架载重小车中,中央小车包括一个装载集装箱的平台。
平台的高度是当考虑了集装箱被升起时载重小车可移动的最低高度形成基准高度时的高度,这样可以缩短集装箱起重机的搬运时间。
50t岸桥技术规格书
50t-22m岸边集装箱起重机技术规格书1.供货范围一台50t-22m岸边轨道式集装箱起重机(以下简称岸桥)的设计、制造、部装、总装、发运到重庆江北区寸滩港区、安装、调试、交验、取证(含获取得重庆市特种设备使用合格证)及技术服务的全部工程。
岸桥除本机及其内部设置外,还包括如下范围:1.1 BROMMA的中间可分离式额定载重量为50t的双箱吊具壹套,和与吊具匹配的吊架壹套。
1.2 连接起重机与码头高压电箱之间的高压圆形供电电缆壹根(有效行走距离左、右各120m)。
1.3 高压供电箱及其固定装置壹套。
1.4 随机备件,随机工具、附件和仪器、仪表等壹套。
1.5 防风锚定装置壹套。
1.6 技术培训和现场服务。
1.7 使用说明书的中文电子文档壹套,开工前为现场监理(造)提供壹套监造图纸,设计图纸和竣工图纸(含维修及保养用零件图)及其相关中文资料各肆套,包括中文的机电设备清单,维修和检查手册,电气控制部分的PLC应用程序软件、梯形图、原理图及其端子板图等。
变频器的中文用户手册、编程手册和参数设定值清单等。
1.8 便携式远程控制器(德国HBC公司产品)壹套(包括说明书、维修手册等相关技术资料)。
其功能应能满足岸桥的起升、大车行走、小车行走和吊具全套动作及声光报警信号等正常运行的要求。
2.供货方式和安装岸桥运送到甲方码头,安装到甲方指定的起重机轨道上。
乙方将承担安装、接电调试和交验等服务,通过重庆市质量技术监督部门检测同意投入使用并取得合格证书、直至双方签署验收证书为止的一切责任、风险和费用。
乙方在岸桥合同签署生效后一个月向甲方提供起重机的运输和上岸详细的工艺,以供甲方审核和确认。
3.起重机的基本技术规格3.1 结构形式起重机安装在岸边轨道上,具有可供装卸ISO标准20´、40´集装箱和同时作业两个20´集装箱的吊具。
起重机能做起升、大车行走、小车行走、吊具纵横倾斜和水平旋转。
起重机的双大梁为固定式,不作俯仰运动。
岸桥总装检验指导书
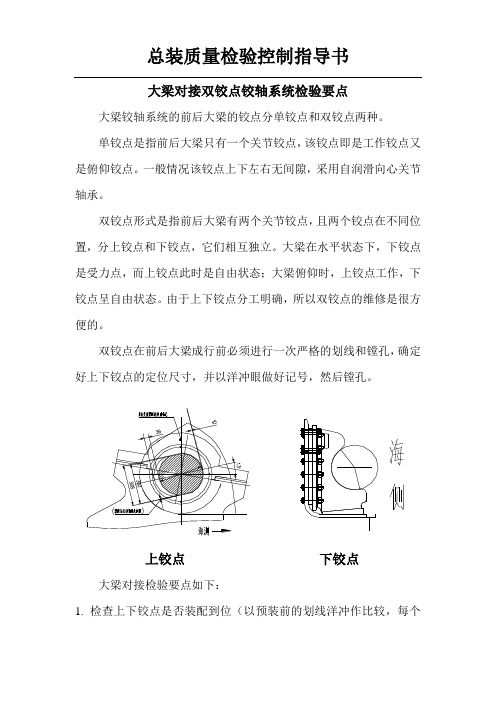
大梁对接双铰点铰轴系统检验要点大梁铰轴系统的前后大梁的铰点分单铰点和双铰点两种。
单铰点是指前后大梁只有一个关节铰点,该铰点即是工作铰点又是俯仰铰点。
一般情况该铰点上下左右无间隙,采用自润滑向心关节轴承。
双铰点形式是指前后大梁有两个关节铰点,且两个铰点在不同位置,分上铰点和下铰点,它们相互独立。
大梁在水平状态下,下铰点是受力点,而上铰点此时是自由状态;大梁俯仰时,上铰点工作,下铰点呈自由状态。
由于上下铰点分工明确,所以双铰点的维修是很方便的。
双铰点在前后大梁成行前必须进行一次严格的划线和镗孔,确定好上下铰点的定位尺寸,并以洋冲眼做好记号,然后镗孔。
上铰点下铰点大梁对接检验要点如下:1.检查上下铰点是否装配到位(以预装前的划线洋冲作比较,每个铰点均有横向和纵向的洋冲标记)。
2.保证前后大梁对接承轨梁呈水平状态,前大梁四个点(各拉杆节点受力处),后大梁六个点(上横梁与大梁节点处和尾部后撑杆节点处),只有保证前后大梁承轨梁呈水平状态下,方可进入下道测量工序,注意各个水平点在测量时,千斤顶必须放在大梁隔板处,否则大梁面板很容易受到变形。
3.铰点处前后大梁承轨梁检查:a.铰点处承轨梁间隙:为避免俯仰带来的承轨梁干涉,原则上前后大梁对接处承轨梁间隙要求为10mm。
b.铰点处承轨梁表面高低差要求为≤0.5mm,超差太大可以调整下铰点上下位置弥补。
c.铰点处前后大梁承轨梁中心线左右偏差≤0.5mm。
4.检查测量前大梁旁弯:以后大梁理论中心为基准,测量前大梁头部偏差量,要求在10mm范围之内,可调整下铰点前后位置来弥补,调整公式为(承轨梁中心矩:前大梁长度=下铰点调整量:旁弯)。
例:承轨梁中心矩为6400mm,前大梁长度为64m,旁弯为左偏10mm,则左侧下铰点需在原有的基础上前海侧移1mm。
5.检查上下铰点间隙:a.上铰点海侧孔间隙要求为5mm,上平面要求间隙为3mm。
上铰点左右侧两轴孔中心线必须同心.调整完毕后上铰点陆侧方向加定位块,终拧高强度螺栓。
岸桥操作规程
岸桥操作规程岸桥操作规程是指岸桥操作人员在进行作业时需要遵守的一系列规定和流程。
岸桥操作是港口装卸作业中非常重要的一环,合理的操作规程能够保障作业的安全和效率。
下面是一份关于岸桥操作规程的示例,共计1200字。
一、岸桥操作人员基本要求1.1 操作人员必须持有岸桥相关的证书和资质,并经过相应的培训和考核。
1.2 操作人员必须严守纪律,服从指挥,不得私自调整岸桥的位置或操作方式。
1.3 操作人员必须具备良好的沟通和协调能力,与其他作业人员保持密切的沟通和配合。
1.4 操作人员必须时刻保持警觉,注意观察周围环境,及时发现并报告潜在的安全隐患。
二、岸桥操作流程2.1 开机准备2.1.1 操作人员在开始操作前,必须先检查岸桥设备的各项参数是否正常,如电气系统、液压系统、机械部件等。
2.1.2 确保岸桥设备的运行区域没有障碍物,并按照设定的工作区域进行标识。
2.1.3 开机前必须严格按照操作手册的要求进行启动操作,并记录驾驶岸桥的相关信息。
2.2 装卸操作2.2.1 操作前,应确认作业标的物和目标位置是否一致,避免操作误差。
2.2.2 操作过程中应根据作业计划合理调整装卸的顺序和速度,确保作业高效且安全。
2.2.3 在装卸过程中,必须注意岸桥的重量和平衡性,避免过载或倾倒等风险。
2.2.4 在移动作业时,应保持岸桥稳定,并避免急刹车、急转弯等危险行为。
2.2.5 操作中需始终注意作业区域周围的行人和车辆,确保作业安全。
2.3 作业结束2.3.1 作业结束后,操作人员必须及时关闭岸桥设备,按照要求进行停放和固定。
2.3.2 如果岸桥发生故障或异常情况,操作人员必须立即停止操作,并及时报告有关部门进行处理。
2.3.3 操作结束后,操作人员应对岸桥设备进行巡视,检查是否有损坏或其他异常情况,并记录相关信息。
三、岸桥安全注意事项3.1 操作前要认真检查岸桥设备的安全装置是否完好,如安全门、红外线、限位器等,并确保其正常运行。
岸边集装箱桥式起重机安全操作标准(新)

岸边集装箱桥式起重机安全操作标准1 范围1.1本规程规定了岸边集装箱桥式起重机(以下简称桥吊)司机(以下简称司机)进行集装箱、特种作业等工作时在作业前、作业中、作业后的安全操作要求。
1.2本标准适用于港口装卸司机操作、安全生产监督检查。
2 依据标准GB11602-89《集装箱港口装卸作业安全规程》GB5082-85 《起重吊运指挥信号》GB1992-85 《集装箱名词术语》3.术语3.1岸边集装箱桥式起重机Quayside container crane(简称岸桥、桥吊):在码头前沿进行集装箱装卸作业的装卸设备,它是现代集装箱专业码头对船作业的最主要工具。
3.24操作标准4.1未取得该类特种设备作业资格证书者不得独自从事该项工作;学徒上机操作时必须有师傅在场监护。
取证后独立作业未满1年者,禁止独立进行特种作业。
4.2桥吊司机应穿戴好劳动保护用品,安全帽要生根,拉紧衣服拉链,扣好衣扣,系紧鞋带。
4.3禁止酒后上机作业。
禁止携带个人通讯工具上机。
4.3上下桥吊注意事项4.3.1 上下桥吊时应精神集中,抓牢扶手,逐阶上下,严禁追逐打逗,不准披衣夹物,非工作人员严禁上桥吊。
4.3.2 上下桥吊时所带物品、工具必须放在工具袋内背好,较重的物品、工具应用绳子提放,严禁抛掷工具和物品。
4.3.3 桥吊在作业中,禁止任何人员上下。
如确需上下时,必须通知司机,停止桥吊动作后方可上下桥吊,并保持联系。
4.3.4经过司机室通道安全门时,必须和驾驶室司机取得联系,否则不准穿越安全门。
4.3.5使用电梯上下桥吊时,电梯载重和乘员均不得超过铭牌或技术规范规定数值,在层门和轿厢门关好后,方可启动电梯。
4.4作业前要求4.4.1作业前,司机及报关手应将无线对讲机调至同一规定频率,并进行试讲。
4.4.2作业前,司机必须进行交接班。
4.4.3交接班司机应按照桥吊规定的检查内容,逐一进行交接,并确保符合要求。
4.4.4接班司机和报关手共同检查桥吊周围的作业环境,排除障碍物,解除锚固和防风楔。
岸桥司机操作规程

岸桥司机操作规程岸桥司机操作规程一、引言岸桥司机是负责驾驶和操作岸桥设备的专业人员,对于保障岸桥的安全稳定运行具有重要意义。
为了确保岸桥司机的操作安全和准确性,制定本操作规程。
二、操作岸桥前的准备工作1. 熟悉岸桥的结构和性能特点;2. 了解当前作业区域的情况,包括货物的种类、装卸方式和特殊要求等;3. 检查岸桥的技术状态和装备情况,确保设备的正常运行;4. 确保岸桥的安全环境,包括检查工作区域的平整度和干净度等;5. 检查岸桥的操作控制系统,确保各部分设备的正常工作。
三、岸桥的操作流程1. 在操作前,打开岸桥的主开关,并确保设备的正常通电;2. 根据作业要求,调整岸桥的各个部位的位置,包括大车、小车、升降机和龙门桥等;3. 根据操作指令,控制岸桥的起重机械进行上下行、左右行、前后行的移动;4. 在操作过程中,注意观察作业区域的情况,特别是周围环境和其他设备的运行情况;5. 在起重物接近装卸位置时,确保操作平稳,避免碰撞和摆动等意外情况;6. 在装卸操作过程中,掌握起重物的重量、稳定性和焦点等关键参数,确保作业的安全和顺利进行;7. 在作业结束后,关闭岸桥的主开关,对设备进行检查和维护,确保设备的正常工作状态。
四、岸桥操作事故的预防措施1. 在操作过程中,严禁疲劳驾驶和操作设备,保持清醒的状态;2. 严禁在装卸作业过程中,搞笑、打闹和玩乐等不当行为;3. 注意操作区域的安全,确保没有人员、障碍物或危险因素;4. 遵守操作规程和相应的安全操作规定,不擅自改变操作方式;5. 在临近操作区域时,提前示意其他人员并使用警示信号,确保周围人员的安全意识;6. 注意观察天气和风力等自然环境因素,避免在恶劣环境下操作设备;7. 在操作过程中,及时向相关人员报告设备故障和操作障碍,确保安全和快速解决问题。
五、岸桥司机的职责和要求1. 必须具备相关的岸桥操作证书和计算机应用知识;2. 熟悉并遵守相关的法律法规和安全操作要求;3. 具备较强的沟通和协作能力,能够与其他人员良好配合;4. 具备解决问题的能力和意识,能够在紧急情况下迅速做出正确决策;5. 具备良好的应急处理和突发事件的处置能力;6. 定期参加相关的技术培训和考核,不断提高自身的专业水平;7. 注重岸桥设备的维护和保养,确保设备的正常运行。
3 第一章岸桥构造及功能简介(OK)
岸桥构造及维护手册
第1章 岸桥构造及功能简介
第 1 章 岸桥构造及功能简介
本章要点:
岸桥及配套零部件的使用寿命在很大程度上取决于买方的正确使用、安全操作和及 时保养。
将岸桥构造及功能介绍作为本版《岸桥构造及维护手册》的开篇章节,其目的是使 岸桥操作、维修人员能了解起重机的构造、功能、性能和特点。为正确、安全地操作和 保养岸桥打下良好的理论基础。
电动机 减速箱 高速制动器
型号 功率 转速 型号 速比 额定扭矩 型号 制动力矩
表 1-2:主起升机构主要零部件参数
ODRKF 400L 2X720kw
低速制动器
型号 制动力矩
900/1800rpm
型号
FH1655.21.C2A
高速联轴器 额定扭矩
21.389
制动扭矩
2X275kNm YP41-4500-900x30
1
2
3
图 1-6: 起升卷筒末端的限位装置
1 凸轮限位 2 超速开关 3 绝对值编码器
图 1-7: 增量型编码器 2) 高速轴制动器限位开关
两个起升制动器都是由一个制动器释放限位开 关(常开触点)和一个制动器手动释放限位开 关(常闭触点)监测。在没有起升手柄命令的 情况下,激活其中任何一个限位开关,都会禁 止起升动作。
活该开关电动机将正常停止。此时可以在 CMS 系统中将绝对值编码器“手动清零”。
4) 上升减速检测 由增量型编码器和凸轮限位开关共同控制。如 果在凸轮限位开关的上升减速检测点动作时, 增量型编码器反映起升速度值没有减小到设定 范围值,那么将启动紧急停车。
5) 上升智能减速 由凸轮限位开关和 PLC 的程序共同控制。可以 根据实际速度的大小设定减速距离,目的是到 达指定位置时起升速度均减小为设定值。
岸桥工作原理

岸桥工作原理 岸桥是一种用于装卸货物的专用起重机械设备,在港口等物流场所广泛应用。
本文旨在详细介绍岸桥的工作原理,包括组成部分、工作原理和操作流程等方面。
一、岸桥的组成部分 岸桥由多个主要组成部分构成,每个部分具有特定的功能,以下将对其进行详细介绍。
1. 门架:岸桥的主要结构,用于支撑和固定各个部分。
门架包括吊杆、横梁和纵梁等部分。
2. 大车:位于门架上的平台,上面安装有起重机构和行走机构,用于沿横梁方向进行行走和起重装卸货物。
3. 起重机构:用于提升和放下货物,通常包括升降机构和回转机构。
升降机构通过卷扬装置和钢丝绳实现货物的垂直运动,回转机构用于使大车上的起重机构能够在水平方向进行旋转。
4. 行走机构:用于使大车沿着门架的纵轨道进行行走,通常采用电力或液压驱动。
行走机构具有起重机构平稳运行所需的稳定性和牵引力。
5. 控制系统:用于控制和监控岸桥的运行状态,通常通过控制台进行操作。
二、岸桥的工作原理岸桥的工作原理可以总结为以下几个步骤: 1. 起吊:首先,操作人员将起吊钩降低到货物所在位置,并使用回转机构将起吊钩定位在正确的位置。
2. 起升:启动升降机构,通过卷扬装置和钢丝绳使货物垂直上升到预定高度。
3. 行走:启动行走机构,使大车沿着门架的纵轨道进行平稳行走,将货物运送到目标位置。
4. 放卸:当货物到达目标位置时,操作人员停止行走机构和升降机构的运行,然后使用回转机构将货物放下。
5. 返回:完成一次操作后,岸桥将返回初始位置,为下一次装卸作业做准备。
三、操作流程举例下面以港口岸桥为例,描述一次典型的操作流程:1. 装船阶段: a. 操作人员利用控制台控制岸桥的行走机构将货物吊杆移动到船舱上方; b. 使用起重机构将货物吊起,并向外伸展横梁,确保货物能够完全进入船舱;c. 起升大车,使货物垂直上升到船舱高度;d. 行走大车将货物从船舱中取出,运送到指定位置。
2. 卸船阶段: a. 操作人员利用控制台控制岸桥的行走机构将货物吊杆移动到船舱上方; b. 使用起重机构将货物吊起,并向外伸展横梁,确保货物能够完全进入岸边的货柜卡车上;c. 起升大车,使货物垂直上升到卸货车辆高度; d. 行走大车将货物从船舱中取出,放置在货柜卡车上。
02第二章岸边集装箱起重机基础知识
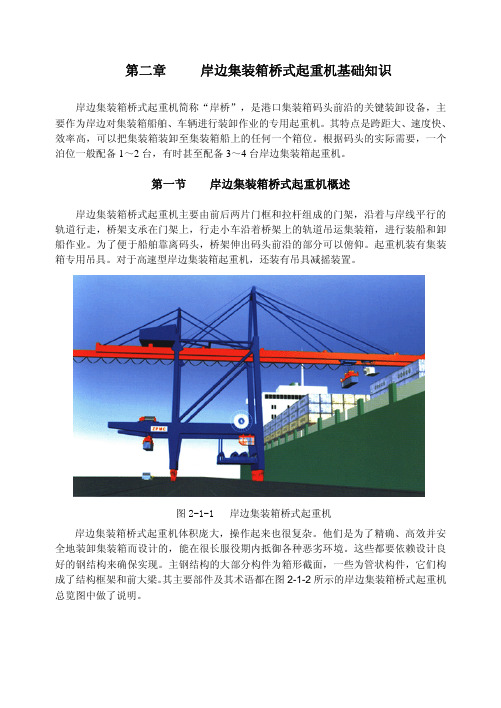
第二章 岸边集装箱桥式起重机基础知识岸边集装箱桥式起重机简称“岸桥”,是港口集装箱码头前沿的关键装卸设备,主要作为岸边对集装箱船舶、车辆进行装卸作业的专用起重机。
其特点是跨距大、速度快、效率高,可以把集装箱装卸至集装箱船上的任何一个箱位。
根据码头的实际需要,一个泊位一般配备1~2台,有时甚至配备3~4台岸边集装箱起重机。
第一节 岸边集装箱桥式起重机概述岸边集装箱桥式起重机主要由前后两片门框和拉杆组成的门架,沿着与岸线平行的轨道行走,桥架支承在门架上,行走小车沿着桥架上的轨道吊运集装箱,进行装船和卸船作业。
为了便于船舶靠离码头,桥架伸出码头前沿的部分可以俯仰。
起重机装有集装箱专用吊具。
对于高速型岸边集装箱起重机,还装有吊具减摇装置。
图2-1-1 岸边集装箱桥式起重机岸边集装箱桥式起重机体积庞大,操作起来也很复杂。
他们是为了精确、高效并安全地装卸集装箱而设计的,能在很长服役期内抵御各种恶劣环境。
这些都要依赖设计良好的钢结构来确保实现。
主钢结构的大部分构件为箱形截面,一些为管状构件,它们构成了结构框架和前大梁。
其主要部件及其术语都在图2-1-2所示的岸边集装箱桥式起重机总览图中做了说明。
图 2-1-2 岸边集装箱桥式起重机结构总览图1-侧下横梁;2-侧下横梁;3-海侧门腿;4-陆侧门腿-;5-联系横梁;6-梯形架支腿;7-后大梁;8-海侧上横梁;9-陆侧上横梁;-10-前后大梁;11-梯形架顶部联系梁;12-外侧前大梁拉杆;13 -内侧前大梁拉杆;14-后拉杆;15-机器房及机器房周围的平台;16-机器房内的电气房;17-俯仰操作室;18-前大梁顶端联系梁一、岸边集装箱桥式起重机发展概况1966年美国帕色科公司为西德不莱梅港建造了欧洲第一台岸边集装箱起重机。
1967—1968年间,欧洲、日本开始制造岸边集装箱起重机和其它集装箱装卸机械,最初阶段主要是仿制美国的集装箱装卸机械,后来欧洲和日本的厂家逐步积累经验,开始独立设计制造自己的集装箱装卸机械。
4第二章岸桥维护保养指南

2.3.1.1 “干洗”法
这里的“干洗”法主要是指不使用水或溶剂,只 采用物理方法将污物从表面去处的方法。主要如 图 2-1 所示,常用的方法有:
1) 使用吸尘器,它可以直接将灰尘、小的垃圾 直接从物体表面清除。必须定期清洁机器 房、电气房、司机室等机械、电气设备非常 集中的地方。从而给机器的运行创造一个洁 净的环境,有利于提高设备的运行寿命及稳 定性。这种方法最常用,这里不在赘述。
1) 如果在检查、润滑钢丝绳时,或出于其它 原因,手要碰到钢丝绳,钢丝绳运行方向 必须是离开挤压点。
2) 维护人员必须特别注意移动/转动的零部 件。
3) 检查钢丝绳时,必须有一个人位于司机和 维护人员之间充当监护者。
4) 从机房地板上的地舱口吊装零件时,打开 舱口之前应在舱口四周装上防护栅栏。
5) 直接或间接接触导电部件前必须切断电源 并且确保不会被重新打开。
12) 另外在重新装配零件时,通常也要对有污 垢的零件清洗干净后才允许装配。
2.3.2.2 电气元件及系统的清洁。
1) 高压变压器应定期清除粉尘以防漏电。
2) 电气房要保持清洁。门和窗户要关闭,控 制屏内部和其它地方的粉尘应该用真空吸 尘器清除。压力风扇应一直处于运转状态。
3) 使用吸尘器对容易吸收粉尘的部位进行除 尘工作。比如电气房和CMS房内的各种控 制柜(如 图 2-5)、电脑显示屏等。
表 2-1:部分零部件供应商名单(机械部分)
减速箱
ZPMC
高速轴制动器
ZPMC
卷筒制动器
ZPMC
卷筒制动器泵站
ZPMC
夹轮器
ZPMC
夹轮器泵站
ZPMC
卷筒联轴器
ZPMC
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
起升
大连伯顿
2
小车 运行
大连伯顿
3
俯仰 机构
大连伯顿
4
大车 运行
SEW
45t-10.5m 岸边式集装箱起重机
第
6 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
⒈⒋2辅助电机 ⒋2辅助电机
编号 部件 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 电机参数 7.5kw×3 YZDEJ160L3-8 722r/min 380v S1 3 1.5kw Y-90L-4-B5V1 1400r/min 380v S1 1 3kw Y-100L2-4-B5V1 1430r/min 380v S1 2 5.5kw Y-132s-4-B5V1 1440r/min 380v S1 1 7.5kw YBZS2-2 2900r/min AC380 V,50Hz,3∮ S1 1 1.5kw 供应商
共计 53 页
编号
部件 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量
电机参数
供应商
13
小车 运行 电机 的风机
AC380 V,50Hz,3∮ 连续 1
大连伯顿 与小车牵引电机配 套
14
俯仰 运行 电机 的风机
AC380 V,50Hz,3∮ S1 1
大连伯顿 与俯仰电机配套
45t-10.5m 岸边式集装箱起重机
第
3 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
保安全。 在起重机上工作人员需要通过的梯子、走道和平台,以及机器房内部都设有照明 灯,便于工作人员晚间能安全通行。在起重机海侧梯形门架顶部和前伸梁顶端设有航 空安全警告灯及避雷针。在海侧梯形门架顶部还设有两台风速仪,以便随时报告风速, 以便采取相应措施。在前后大梁下还设有工作照明灯系统。这些措施均保证起重机在 工作或非工作状态时航空和起重机安全。 本机金属结构:前大梁和后大梁采用箱形结构型式;海陆侧上、下横梁及门框立 柱,下横撑均采用箱形结构;后拉杆,门框上横撑和斜撑均采用圆管结构型式;前拉 杆采用工字形结构;梯形门架主架采用箱形结构。整个门框系统与后大梁采用刚性联 接,梯形门架和后拉杆分别与前后门框刚性连接。 本机各机构设有各种行程限位开关,安全保护开关,联锁装置及超速保护装置, 确保整机的安全工作和性能完善。
⒈4电机、减速器、制动器规格 电机、减速器、 ⒈⒋1主要电机
编号 部件 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 电机参数 250kw YZP355L-6 784~1960r/min 380v 连续 1 55kw YZP280M-8 661.5~1323r/min 380v 连续 1 37kw YZP225M-6 980r/min 380v 连续 1 9.2kw×8 KA107TDM132ML4-BM/HF/MIC/C 1440r/min 380v 连续 8 供应商
第
6 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
编号
部件 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 容量 型式 转速 电压 DUTY 数量 1.1kw
⒈⒉2环境条件 ⒉2环境条件
⑴、环境温度: ⑵、相对湿度: ⑶、风速: ⑷、地震烈度: 最大 工作最大风速 非工作最大风速 -15℃~45℃ 100% 18m/s 44m/s ≤7级
⒈⒉3起重机的使用寿命 ⒉3起重机的使用寿命
起重机设计使用寿命20年。
⒈3主要技术参数
⑴、起重能力 a)、吊具下额定起重量: (吊具自重): b)、吊架下最大负荷 : (吊架自重): 35 t 11.5 t 48 t ~2.92t
1
倾转 装置
大连伯顿
2
小车 牵引 液压 张紧 装置
大连伯顿
3
轮边 制动 器液 压泵 站 俯仰 起升 低速 轴制 动器 液压 泵站
大连伯顿
4
大连伯顿
5
机器 房空 压机
上海第二空压机厂
6
机器 房进 风扇
AC380 V,50Hz,3∮ S1 2
溧阳天煜港湾机械 有限公司 配套
45t-10.5m 岸边式集装箱起重机
45t-10.5m 岸边式集装箱起重机
第
5 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
⑼、吊具和吊具上架 伸缩式吊具、吊具上架由上海振华提供,吊钩横梁由设计院设计,制造厂制 造。吊具上架可与吊具和吊钩横梁方便拆卸(吊钩横梁配有搁置架)。 ⑽、倾转 纵向倾: ±5° ω≥0.5°/s 横向倾: ±3° ω≥0.15°/s 平面回转: ±5° ω≥0.5°/s ⑾、供电方式 a)、整机行走:电缆卷筒供电,卷绕长度>80m。 b)、小车行走:电缆托令小车式,行走距离为40.5m。
⒈2起重机的工作条件和使用寿命 ⒈2起重机的工作条件和使用寿命 ⒈⒉1起重机和机构工作级别
整机工作级别: 起升机构工作级别: 小车牵引机构工作级别: 大车运行机构工作级别: 俯仰机构工作级别: A8 M8 M8 M6 M5 (U8,Q3) (T8,L2) (T8,L2) (T5,L3) (T4,L3)
45t-10.5m 岸边式集装箱起重机
第
4 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
⑵、工作速度 a)、起升: 满载: 30 m/min 空载: 75 m/min b)、小车运行: 满载: 60 m/min 空载: 120 m/min c)、大车运行: 30 m/min d)、前大梁俯仰 单程提升及挂钩时间: 6 min ⑶、应急速度 a)、起升机构: 8 m/min(空载) b)、小车牵引机构: 10 m/min(空载) c)、俯仰机构: 单程 13 min ⑷、工作幅度 a)、自海侧轨前伸距: 22 m b)、自陆侧轨后伸距: 8 m ⑸、起升高度 a)、轨面以上: 20 m b)、轨面以下: 15 m ⑹、净空 a)、门框内净空宽: 18.3m b)、海陆侧门框间下横撑净空高: 6 m ⑺、外型尺寸 a)、缓冲器外总宽: 30.706m a)、整机大梁外总长: 61.3 m ⑻、整机行走参数 a)、轨距: 10.5 m b)、基距: 19.7 m c)、行走轨道: P50 (YB172─62) d)、车轮数 每腿: 10个/每腿 驱动轮数: 4个/每腿 总轮数: 40个 e)、锚定装置 (手动式): 1组/门框(共2组) f)、轮边制动器 (电动液压式): 2组/腿(共8组) g)、缓冲器 (液压式): 1台/腿(共四台) h)、最大轮压: 25 t i)、行走距离: 2×80=160 m
溧阳天煜港湾机械 有限公司 配套
蒲圻起重运输机械 有限公司 配套
蒲圻起重运输机械 有限公司 配套
蒲圻起重运输机械 有限公司 配套
常州开关厂
12
起升 电机 的风机
AC380 V,50Hz,3∮ 连续 1
大连伯顿 与起升电机配套
45t-10.5m 岸边式集装箱起重机
第
8 页
长江船舶设计院
使用说明书
GCS0903-00SM1
45t-10 5m 45t-10.5m 岸边式集装箱 起重机 GCS0903-00SM1 标记 数量 修改单号 签字 日期 编制 张化伦 打字 张化伦 校对 审核 审定 批准 日期 图样标记 总面积 m2
使用说明书
(机械部分) 共 53 页 第 1 页
长江船舶设计院
45t-10.5m 岸边式集装箱起重机
⒈⒋3减速器 ⒋3减速器
编号 部件 型式 传动比 中心距 许用功率 输出扭矩 数量 型式 传动比 中心距 许用功率 输出扭矩 数量 型式 传动比 中心距 许用功率 输出扭矩 数量 减速器参数 3C560NE-55.4-1240-1234 55.36 1240 305kN.m 1 M3PSF60-35.717-715-124 35.717 715 SEW 61.6kN.m 1 4C390NE-251.366-1050-1234 251.366 1050 SEW 135kN.m 1 供应商
电机参数
供应商
7
机器 房排 风扇
8
机器房修 理起重机 起升
9
机器房修 理起重机 小车运行
10
机器房修 理起重机 大车运行
11
电缆 卷筒
AC380 V,50Hz,3∮ S1 2 7.5kw ZD41-4 131 0.8kw ZDY121-4 1380r/min AC380 V,50Hz,3∮ S1 1 0.8kw ZDY121-4 1380r/min AC380 V,50Hz,3∮ S1 2 3.75kw 189 TC 1425r/min AC380 V,50Hz,3∮ S1 2
第
2 页
长江船舶设计院
使用说明书
GCS0903-00SM1
共计 53 页
1 规格 ⒈1概要 ⒈1概要
本起重机是按合同要求为武汉港集装箱有限公司设计制造的, 安装在武汉港集装箱 码头,以装卸集装箱为主的起重机。本起重机由长江船舶设计院设计、国营武汉船用机 械厂制造安装。 本起重机属水平双悬臂式岸边集装箱起重机,海侧悬臂(前伸臂)可以升起。本机 吊具下起重能力为35t, 最大前伸距为22m (距海侧轨道) 最大后伸距8m , (距陆侧轨道) , 配有能装卸20英尺、40英尺、45英尺三种规格的集装箱伸缩式吊具。 本机动力使用380V, 50Hz交流电源。 它的供电方式是将设在码头海侧地面电坑中 输出电源,通过装在海侧门框立柱上的电力驱动电缆卷筒装置,然后供电给起重机。电 源经电缆卷筒装置,首先传输到机房内的电源开关柜,然后经过变压器,将不同电压等 级的电源输送到机房内各配电柜,由交流变频器及PLC控制并驱动各主要工作机构。 起升机构采用交流变频调速控制, 能根据负荷的大小自动调节升降速度。 机构配有 高度指示器,超负荷装置,超速保护装置等,能确保起重机工作安全、高效率。 俯仰机构采用交流变频调速控制, 可以将前大梁仰起至与水平夹角80°和将前大梁 下放至水平位置。 俯仰运动通过海侧门框上横梁上的俯仰操作室和驾驶室操纵, 在驾驶 室内操纵至前大梁与水平夹角≤60°范围内, 而后至俯仰操纵室操作。 减速器输入轴上 及卷筒端部的液压盘式制动器和机构设置的超速保护装置,能确保前大梁俯仰工作安 全。当起重机不工作时,前大梁仰起通过海侧梯形门架顶部的安全钩锁定。 小车牵引驱动机构采用交流变频调速控制,使小车架结构简单、自重轻。小车架陆 端悬挂驾驶室,司机在驾驶室里操纵整台起重机运行。二根牵引钢丝绳:前一根,通过 设在海侧门框上横梁处的两只液压张紧油缸张紧, 其二端固定在卷筒上, 另一端固定在 小车架上;后一根,两端均固定在卷筒上,中间通过小车架上的平衡滑轮;保证每一根 钢丝绳受力一致。 起重机海、 陆侧门框两侧分别支撑到10只车轮组成的大车行走机构上。 大车行走机 构采用交流变频调速控制,驱动轮数为总轮数的2/5。为了防止暴风时起重机移位,在 每组行走机构上设置有一组防风拉索。同时,为防止作业时突然大风引起起重机移位, 在每组行走机构上还设有二套液压轮边制动器。 为减缓起重机之间或起重机与码头车挡 之间的冲撞动能,在每组行走机构上外侧均设有液压缓冲器一台。 本机锚定装置, 在前后门框下各设置一组锚定装置, 每组锚定装置有两个同步插板, 分置轨道两侧,起防风作用。 本机采用机械式倾转装置,实现吊具的左右倾、前后倾和平面回转。驱动采用螺杆 驱动形式。 在机器房内配置了一台修理用桥式起重机, 能将5t重的零部件从码头面起吊至机器 房内的任一平面位置。 修理起重机采用交流驱动, 通过起重机悬挂按钮盒方便的操纵该 修理起重机起升和小车、大车的行走。 为了便于工作人员上下起重机和维修人员的维修保养工作, 在起重机陆侧门框一侧 设有斜梯,可从地面分别到达驾驶室和机器房。整机的梯子、走道和平台,可以使工作 人员到达所需要检查、维修和保养的地点。所有的梯子、走道和平台,紧固、宽敞,确