4UFD—1400A1型薯类联合收获机简介
4U-1400FD型马铃薯联合收获机挖掘铲的参数优化

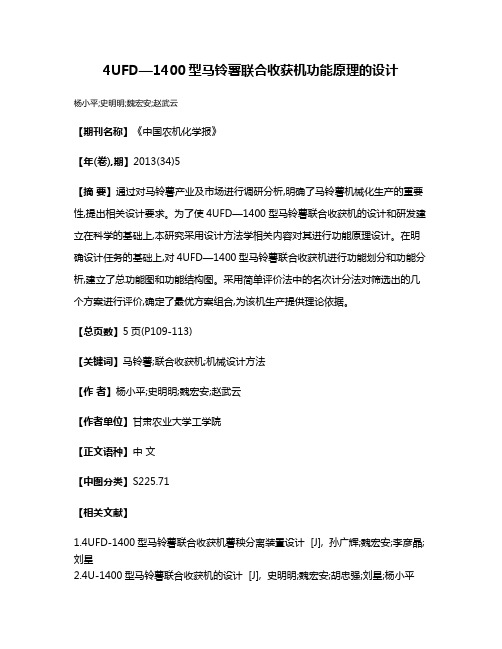
4U-1400FD型马铃薯联合收获机挖掘铲的参数优化李彦晶;魏宏安;孙广辉;刘星【摘要】对4U-1400FD型马铃薯联合收获机的挖掘铲建立牵引阻力的数学模型,在此模型下分析挖掘铲的铲面倾角、作业速度、挖掘深度、铲体长度等因素对挖掘铲牵引阻力的影响.结果表明:挖掘铲参数的最佳组合为铲面倾角20°,铲体长度470 mm,铲宽1 400mm.通过田间试验,该挖掘铲的性能符合规定的指标.【期刊名称】《甘肃农业大学学报》【年(卷),期】2011(046)005【总页数】5页(P132-136)【关键词】马铃薯联合收获机;挖掘铲;牵引阻力;参数优化【作者】李彦晶;魏宏安;孙广辉;刘星【作者单位】甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070【正文语种】中文【中图分类】S225.7+1马铃薯是一种世界性经济作物,中国是全世界马铃薯种植面积最大的国家.近些年来,随着马铃薯种植面积的不断扩大,马铃薯收获机也在快速发展[1-3].挖掘是马铃薯收获过程中的首要工序,而挖掘装置是马铃薯收获机的核心部件之一,其性能对收获机的整机性能起着决定性的作用[4].在挖掘过程中,挖掘铲是一个非线性动力系统,其参数设计直接影响着挖掘阻力的大小,进而影响收获机的动力消耗,从而影响马铃薯的挖净率、伤薯率等收获性能指标.如何减小挖掘过程中的牵引阻力是挖掘部件研究设计中的主要内容和技术关键.本文在挖掘铲与土壤作用力学模型的基础上分析4U-1400FD型马铃薯联合收获机挖掘铲各工作参数对挖掘铲牵引阻力的影响,旨在为整机的优化提供理论依据.1 4U-1400FD型马铃薯联合收获机挖掘装置1.1 挖掘装置结构甘肃农业大学工学院研发的4U-1400FD型分级装袋式马铃薯联合收获机的挖掘装置主要由仿形碎土辊、挖掘铲、切土圆盘、仿形碎土辊调节杆和铲架组成,结构如图1所示.图1 挖掘装置结构Fig.1 Structure of digging device1.2 挖掘过程4U-1400FD型马铃薯联合收获机在挖掘过程中,先由挖掘铲铲刃切开土壤的薯层,然后将薯垄掘起,薯垄沿着挖掘铲向上滑行,经过剪切碎裂到防石扇.下层破碎疏松的土壤开始下漏,剩下松碎的土薯混合物沿防石扇顺利进入输送和分离装置.1.3 结构特点为了改善挖掘部件的工作质量,使其挖净率高,伤薯率低,壅土少,收获机的工作阻力小,4U-1400FD型马铃薯联合收获机挖掘装置创新了设计结构(图1).在该收获机的挖掘装置中,仿形碎土装置和切土挖掘装置总成与机架通过平行四杆结构相连,通过仿形碎土辊破碎地表土块并调节挖掘深度,利用拖拉机液压输出和收获机液压操作装置调节仿形碎土和切土挖掘装置总成高度,从而保持不同挖掘深度下收获机纵向呈水平状态和挖掘铲入土角不变,以满足马铃薯收获、顺利分级、田间掉头、转移及运输行走的要求.4U-1400FD型马铃薯联合收获机的挖掘铲为分体式三阶平面组合结构,纵向剖面呈“~”形,提高了入土和碎土能力,其结构如图2所示.铲刃、二阶铲面和防石扇共同构成一个纵向复合曲面,其中防石扇由开口板和限位板焊合而成,铰接于心轴上.它的功用是若挖掘铲后纵向输送链上有残秧杂物尤其是石块回带时,可绕其连接销向上翻转,以防止石块损坏挖掘铲.图2 挖掘铲结构Fig.2 Structure of digging blade2 4U-1400FD型马铃薯联合收获机挖掘铲的动力学分析2.1 挖掘铲牵引阻力力学模型的建立马铃薯联合收获机挖掘铲的作业对象除马铃薯之外,还有土壤.土壤的强度、含水率、附着力、内聚力因数,外摩擦因数、内摩擦因数、密度等是影响挖掘性能的土壤物理机械性质[5-6].分别以挖掘铲、土壤为研究对象进行的受力分析(图3~4),其中N0为挖掘铲的法向载荷,N1为作用于前失效面的法向载荷N.图3 土壤受力分析图Fig.3 Load analysis of soil图4 挖掘铲受力分析图Fig.4 Load analysis of digging blade根据图3和图4,把马铃薯联合收获机挖掘铲的工作参数、土壤物理机械性质参数等因素与推动挖掘铲的水平力建立函数关系[7-8],即挖掘铲在土壤中的牵引阻力力学模型为:式中,G为土块质量(kg);z为常数;B为土壤的加速力(N),即;γ为土壤的容积密度(kg/m3);g 为重力加速度(m/s2);b为铲宽(mm);d 为挖掘深度(mm),C 为土壤的内聚力(N/cm2);F1 为土壤剪切面积(m2);μ 为土壤内摩擦因数,μ=tanφ,φ为内摩擦角;β为前失效面倾角,即(90°-φ);Ga为土壤与金属的附着力因数;F0为倾斜耕作部件的面积(mm2);α为铲面倾角;μ1为土壤与金属的摩擦系数.2.2 挖掘铲主要参数对牵引阻力的影响根据挖掘装置的工作特点,此装置中挖掘铲的主要参数包括设计参数和工作参数[9-10].其中设计参数有铲面倾角α(°)、铲体长度l0(mm)和铲面宽度b (mm);工作参数有作业速度ν(m/s)和挖掘深度d(mm).2.2.1 作业速度对挖掘铲牵引阻力的影响在不同的土壤条件下,土壤的内聚力C、内摩擦角φ和附着力因数Ga取值如表1所示.其中设定的参数分别为:α=20°,l0=470mm,b=1 400mm,d=200mm,图5是作业速度对挖掘铲牵引阻力的影响曲线.从W1-ν0曲线中可以得出在其它参数一定的情况下,3种土壤中挖掘铲的牵引阻力W1都随着作业速度ν0的增大而逐渐增大,但ν0在0.5~1.5m/s范围内的牵引阻力上升较平缓.因此在考虑生产效率和配套动力的情况下挖掘铲的作业速度ν0应确定在0.5~1.5m/s范围内.表1 土壤机械性质参数Tab.1 Soil mechanical parameters土壤类型 C/(N·cm -2)φ/° Ga/(N·cm-2)0.5 18 5沙壤土 0.3 22 2砂土壤土0.1 20 1图5 作业速度对挖掘铲牵引阻力的影响曲线Fig.5 Eeffect of working velocityon tractive resistance of digging blade2.2.2 铲面倾角对挖掘铲牵引阻力的影响在沙壤土中,其中设定的参数分别为:l0=470mm,b=1 400mm,ν0=0.897m/s,γ=1 400mm.随着挖掘深度的不同,铲面倾角对挖掘铲牵引阻力的影响曲线如图6所示.W1-α曲线中可以得出,在其它参数一定的情况下,α<10°时牵引阻力随着α的减小而上升;α>20°时牵引阻力随着α的增大而上升较快;α在10°~20°范围内牵引阻力上升比较平缓且阻力要比α<10°时的小.因此挖掘铲的铲面倾角α的合适取值范围为10°~20°.图6 铲面倾角对挖掘铲牵引阻力的影响曲线Fig.6 Eeffect of obliquity on tractive resistance of digging blade2.2.3 挖掘深度对挖掘铲牵引阻力的影响在沙壤土中,其中设定的参数分别为:l0=470mm,b=1 400mm,ν0=0.897m/s,γ=1 400kg/m3.随着铲面倾角的不同,挖掘深度对挖掘铲牵引阻力的影响曲线如图7所示.从W1-d曲线中可以得出,在铲面倾角、土壤性质等参数一定的情况下,挖掘深度越大,挖掘铲的牵引阻力就越大.因此在满足马铃薯的生长条件和挖净率的前提下,挖掘深度d的合适取值范围为150~300mm(马铃薯块茎通常分布在地表以下150~280mm).图7 挖掘深度对挖掘铲牵引阻力的影响曲线Fig.7 Eeffect of digging depth on tractive resistance of digging blade2.2.4 铲体长度对挖掘铲牵引阻力的影响在沙壤土中,设定的参数分别为:α=20°,b=1 400mm,d=200mm,γ=1 400kg/m3.随着作业速度的不同,挖掘铲铲体长度对挖掘铲牵引阻力的影响曲线如图8所示.从W1-l0曲线中可以得出,在土壤特性等参数一定的情况下,挖掘铲的牵引阻力随着铲体长度的增大而增大,l0在430~470mm的范围内牵引阻力变化比较缓慢.掘起物沿挖掘铲铲面向上滑移的过程中,其受力包括:掘起物的重力G、挖掘铲与土壤间的摩擦力F、沿着挖掘铲移动掘起物所需的力P和挖掘铲对土壤的反作用力N,其受力分析简图如图9所示.铲面可分为l1、l2和l33段,当掘起物沿铲面以速度ν0向上滑移时,其动能为E=,此时使其向上滑移所需要的总能量和做消耗的摩擦功 Af=mgl3μcosα2 和增加的势能 Ag=mgl3sinα2是守恒的.故根据能量守恒定律E=Af+Ag得出挖掘铲的总长度l0为:掘起物沿着挖掘铲向上滑移的过程中相对速度逐渐降低,等降为零时掘起物停滞不前出现了严重的壅土现象.当ν0 分别为0.897m/s和1.34m/s时,此挖掘铲的总铲长l0 分别为457.1、502.9mm.本机要求挖掘铲在保证掘起物提升高度的前提下,总长度要尽可能的短,所以铲体总长度l0比理论的最大计算值要有所减小.这样以保证掘起物在铲的末端相对速度不会减小到零,使掘起物输送到后面的土署分离装置上,减少壅土.故铲体长度l0的适合取值为470mm.图8 铲体长度对挖掘铲牵引阻力的影响曲线Fig.8 Eeffect of blade length on tractive resistance of digging blade图9 挖掘铲受力分析简图Fig.9 Load analysis of digging blade3 田间收获性能试验田间试验在甘肃省定西市安定区香泉镇进行.在收获前2周,试验地先用割秧机除去茎秆,地表仍有部分杂草覆盖,地势平坦,无障碍物,土壤含水量为15%,垄高260mm,行距为300mm,垄宽600 mm,沟宽为350mm,株距为300mm,结薯深度为150~280mm.土壤类型为沙壤土,土壤质量密度为1 400kg/m3.配套动力为约翰迪尔654拖拉机,功率为47.8kW.试验结果表明:该机挖掘铲入土和碎土性能好;铲面不粘土、不壅土,土垡后送顺畅;与带杆式土薯分离装置配合,土薯分离效果好;薯块挖净率η≥97%,伤薯率η≤5%,符合设计要求及国家农业行业标准《NY/T 648-2002马铃薯收获机质量评价技术规范》规定的指标.4 结论在挖掘铲参数设计中,考虑到土壤类型、土壤物理机械性质等因素,建立了挖掘铲与土壤作用的力学模型.在此模型下分析讨论了挖掘铲各工作参数对挖掘铲牵引阻力的影响,得出4U-1400FD马铃薯联合收获机挖掘铲的最佳组合为:铲面倾角20°,铲体长度为470mm,铲宽1 400mm.通过田间试验,此组合式挖掘铲的入土和碎土性能好;铲面不粘土、不壅土,土垡后送顺畅;薯块挖净率、伤薯率符合规定的指标.参考文献[1]单爱军,刘俊杰,崔冰冰.马铃薯收获机现状与发展趋势[J].农机化研究,2006(4):19-20[2]张勋.马铃薯生产机械化与产业发展战略[J].农机化研究,2008(1):1-6,15[3]Liu J F,Yang X,Feng X J,et al.The design of combined lifter for harvesting potatoes[C]//The International Agricultural Engineering Conference(IACE2002),Southern Yangtze University,Asian Association for Agricultural Engineering(AAAE),2002,28(30):320-323[4]宋言明.单行牵引式马铃薯联合收获机的研究与设计[D].甘肃:甘肃农业大学,2008[5]Ito M,Sakai K,Hata S,et al.Damage to the surface of potatoes from collision[A].Transactions of the ASAE,1994,37(5):1431-1433[6]陈书法,李耀明,孙星钊.花生挖掘铲动力学分析与试验[J].农业机械学报,2005,36(11):59-62[7]吉尔 W R,范德伯奇G E.耕作和牵引土壤动力学翻译组译.耕作和牵引土壤动力学[M].北京:中国农业机械出版社,1983:102-160[8]贾晶霞.马铃薯挖掘铲参数优化与性能分析[D].保定:河北农业大学,2003[9]贾晶霞,张东兴,桑永英.马铃薯挖掘铲计算机辅助分析与模拟试验研究[J].农业工程学报,2006,22(8):106-110[10]贾晶霞,张东兴.基于计算机模拟的挖掘铲参数优化与试验分析[J].华中农业大学学报,2005,24(S1):103-105。
4UMS-1型木薯收获机的设计

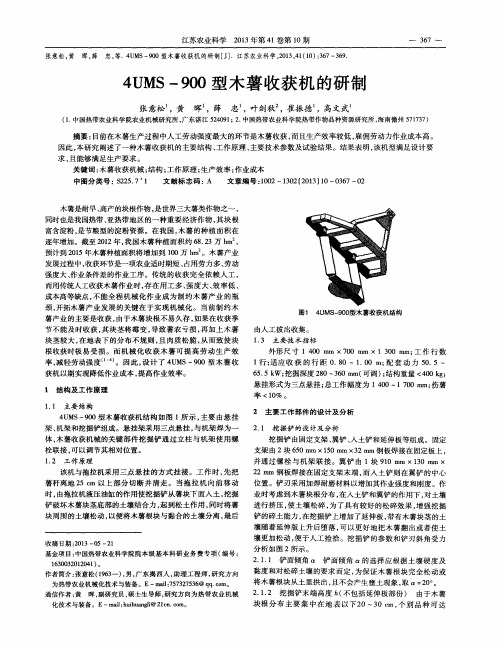
4UMS-1型木薯收获机的设计孙佑攀;廖宇兰;陈丹萍【摘要】针对目前木薯人工收获劳动强度大、生产效率低的现状,设计了4UMS-1型木薯收获机.该机以拖拉机作为动力,采用三点后悬挂方式,以三角形凸面挖掘铲作为起土部件,利用拖拉机输出的动力,经过锥齿轮和带轮传动装置将动力向后传递到夹持输送装置的带轮上,带动夹持轮一边拔起木薯块根,一边将其抬起向后输送一定高度,达到提升和分离土壤的目的.当薯块提升到薯根分离部位时,可通过机器后部的分离刀具实现薯根分离,整机可同时完成木薯挖掘和分离作业,以取代人工收获,提高生产效率.【期刊名称】《农机化研究》【年(卷),期】2012(034)002【总页数】4页(P89-92)【关键词】木薯;收获;机械化【作者】孙佑攀;廖宇兰;陈丹萍【作者单位】海南大学机电工程学院,海南儋州571737;海南大学机电工程学院,海南儋州571737;海南大学机电工程学院,海南儋州571737【正文语种】中文【中图分类】S225.7+10 引言木薯是广泛栽培于热带和亚热带地区的一种重要经济作物。
在我国,木薯栽培面积逐年增加。
2009年,木薯种植面积约53.33万hm2,农业部计划到2015年将木薯种植面积增加到100万hm2。
木薯收获是木薯生产过程中用工量最多和劳动强度最大的一个环节。
传统人工木薯收获用工量多、劳动强度大、效率低且成本高,严重制约木薯产业的发展。
加之木薯块根大,在地表下的分布不规则,且肉质松脆,从而致使块根破损严重,特别是粘性较大的土壤会造成更大的块根损失和损伤。
而机械收获木薯具有收获效率高、薯块损伤率低、田间收获进度快及成本低等优点[1-4]。
借鉴马铃薯、大蒜与红薯等根茎类作物收获机械的基本原理和结构,基于大功率拖拉机作为牵引动力,设计了4UMS-1型木薯收获机。
1 总体方案设计及技术指标1.1 总体结构4UMS-1型木薯收获机结构如图1所示,主要由三点悬挂装置(1)、挖掘铲(2)、夹持输送装置(3)、切薯装置(4)和机架(5)等组成。
马铃薯收获机的设计与试验

刘 潇,李亮亮,戚江涛,等.马铃薯收获机的设计与试验[J].江苏农业科学,2019,47(17):242-247. doi:10.15889/j.issn.1002-1302.2019.17.060
马铃薯收获机的设计与试验
刘 潇1,2,李亮亮1,2,戚江涛1,2,蒙贺伟1,2,李亚萍1,2,孙兴祚1,2,林元熙1,2
该马铃薯收获机可同时完成马铃薯挖掘、薯 -土输送振 动分离及集条铺放等作业。具体工作过程:拖拉机带动马铃 薯收获机前进,齿轮泵在拖拉机后输出轴的带动下将液压油 经换向阀输入到液压比例调节阀中,液压油经液压比例调节 阀分流后进入 2个液压马达,液压马达②用来驱动 V型振动 分离机构进行薯 -土分离,使闭合回转筛完成上下起伏动作, 液压马达①给闭合回转筛提供回转动力,使闭合回转筛完成 薯 -土混合物输送,液压比例调节阀可通过可编程控制程序 对液压油输出量进行调节,进而调节 V型振动分离机构振幅 和闭合回转筛转速。工作时,挖掘铲首先对薯 -土混合物进 行挖掘,然后将其推送到分离装置上,闭合回转筛对薯 -土混 合物进行输送和分离,较小的土块在振动分离筛面上通过栅
目前,国外开展的马铃薯收获技术研究主要有德国格力 莫(Grimme)公司所生产的 RL1700型马铃薯收获机和 SE140 型马铃薯收获机 以 [5] 及挪威 KvernelandNarboAS公司生产 的 UN2600型系列牵引式两行马铃薯收获机[6],为了提高作 业效率,在机器上融入了振动和液压技术,通过传感技术来控 制马铃薯的传运量及土壤喂入量,利用虚拟制造技术和超塑 加工技术等先进技术,国外马铃薯收获机的研制技术水平相 对较高;国内主要采用分段式收获,杆条式分离筛是目前国内 外马铃薯收获机具中广泛采用的结构形式 。 [7] 国内开展的 相关研究主要有黑龙江省伊春市农业机械科学研究所的
4U-1400FD型马铃薯联合收获机机架有限元分析

样机 方法 建立 P o E三维 实 体 图 , r/ 采用 有 限元 法 对
LI AN e — i n W EI Hon — n, W n x a g, g a SH AO —u, Shil ZH ANG ng we Fe — i
( Cole e ofEn ne rng,G a s lg gi e i n u Agrc lur lU nie st Lan h 00 iu t a v r iy, z ou 73 70, Chi a n)
ls d wih ANSYS s f wa e i he t o t r .The s r s it i to m a i t e s d s rbu i n, x mum t e sa e uli r swe ea l z d i s r s nd r s tng pa t r na y e n t e wo k ng s e f3 km ・h t . 3 km ・h h r i pe d o o4 8 . The c lul ton a d t o o y e t r s t h a c a i n he pr t t pe t s e uls s owe d
t tt r m e s r t e de i n was r a o b e,t e e v t e gt s a e a e,a d i ou d wo k ha he fa t uc ur s g e s na l he r s r e ofs r n h wa d qu t n t c l r
4UL1型牵引式马铃薯联合收获机的打秧装置

打 秧 装 置 设 计 打 秧 幅 宽 为 6 c 转 速 为 0 m,
l 0 rmi , 秧长 度 4 c O0/ n 碎 ~5 m。
定:
z一 旦
2 切 刀 的设 计
2 1 切 刀 的 形 状 、 寸 . 尺
收 稿 日期 :01 —8 0 2 00 —5
式 中 : —— 打秧 幅 宽 ,l B Im T
打 秧装 置 ( 1 采 用旋 转 甩 刀 式 切刀 来 切 碎 马 图 ) 铃薯 茎秆 和 杂草 , 刀用 销轴 铰接 在 旋转 轴上 , 切 回转
图 2 切 刀 的 形 状 及 尺 寸 简 图
切 刀 的 形 状 为 矩 形 , 端 留 孔 d, 面 开 刃 , 两 双 刃
时靠 离 心力使 切 刀甩 开 , 刀开有 刃 口 , 离 心力 和 切 在
e —— 最低 切 碎程 度 , mm
打秧 幅宽 为 6 c 最 低 切 碎 程 度 为 4 m, 刀 0 m, c 切 数量为 1 5个 。
3 6
现代 化农 业
21 0 0年第 1 期 ( 第 3 6期 ) l 总 7
切刀在切刀 轴上 的排列 方式 直 接关 系到 整个 切 刀轴 的平衡 和切 刀的磨 损 , 般要 求 是 : 照 工作 宽 一 按
刃 口的联合 作用 之 下 将 薯 秧 和 杂 草 切 碎 , 撒 在 田 抛
里。
1 2 3 4 5 6 7
角 a 4 。两 端 留孔 的好 处是 一个 孔 用来 与销 轴连 一3 。
接 , 磨 损后 调过 头来 用另 一 孔与 销 轴连接 , 续使 待 继
用 切 刀 的另一 个 刃 口。为 了减 少切 刀 传递 到轴 承和 机 架上 的冲击 力 , 根据 粉碎 机设 计 原理 , 刀 的摆心 切 应 当与 销轴 的轴 心 相重 合 ; 于矩形 切 刀来说 , 刀 对 切 中心与 销 轴 中心 的距离 还 应 当尽量 符合 下式 :
4U–1400FD型马铃薯联合收获机分级装袋装置及机架的研究与设计

4U–1400FD型马铃薯联合收获机分级装袋装置及机架的研究与设计4U–1400FD型马铃薯联合收获机分级装袋装置及机架的研究与设计在农业机械化的发展过程中,马铃薯收获机的使用变得越来越普遍。
马铃薯联合收获机不仅能够提高产量,减少人力消耗,还能保证产品的质量和一致性。
本文将重点介绍4U–1400FD型马铃薯联合收获机中的分级装袋装置及机架的研究与设计。
首先,该机型的分级装袋装置采用了先进的传感器技术和自动控制系统。
该系统能够根据马铃薯的大小、重量和形状等参数,自动将马铃薯分为不同的等级。
通过使用分级装袋装置,可以实现马铃薯的快速分级和包装,大大提高了工作效率。
同时,该装置还具备了自动检测和清洁的功能,能够减少人工干预,降低了劳动强度。
其次,4U–1400FD型马铃薯联合收获机所使用的机架设计紧凑且灵活。
该机型采用了轮式移动式机架,具备灵活转弯和移动的功能,方便农民在马铃薯田中进行收获操作。
机架结构稳定且牢固,能够承受较大的工作负荷,提供了良好的工作环境和条件。
同时,该机型还考虑到了马铃薯收获过程中的安全性和稳定性。
在机架的设计中,采用了减震和防滑措施,能够减少机器在不平整地面上的颠簸和滑动。
此外,机器的外部结构也进行了平衡和优化,确保了机器的稳定性和安全性,在各种复杂的地形和环境中都能够顺利工作。
最后,该机型还具备一定的智能化和可调节性。
机器配备了触摸屏控制系统,能够方便地进行设置和调整。
同时,该机型还配备了智能化的检测和报警系统,能够及时发现和解决故障,保障机器的正常运行。
此外,机器还具备一定的自适应能力,能够根据不同的地形和作业需求进行适应性调整。
综上所述,4U–1400FD型马铃薯联合收获机中的分级装袋装置及机架的研究与设计,通过先进的传感器技术和自动控制系统实现了马铃薯的快速分级和包装,大大提高了工作效率。
同时,该机型还采用了紧凑灵活的机架设计,确保了机器的安全性和稳定性。
此外,机器还具备一定的智能化和可调节性,能够适应不同的工作环境和需求。
4U-1400型马铃薯联合收获机的设计

4U-1400型马铃薯联合收获机的设计
史明明;魏宏安;胡忠强;刘星;杨小平
【期刊名称】《干旱地区农业研究》
【年(卷),期】2014(032)001
【摘要】针对国内马铃薯收获依靠人工或小型挖掘机效率低、劳动强度大等问题,设计了4U-1400型马铃薯联合收获机.收获机主要由挖掘装置、土薯分离装置、茎秆分离装置、垂直提升装置、装袋装置、传动系统、机架以及行走装置等部分组成,结构紧凑.通过运动学分析和试验,确定了各装置的关键参数.运用Solidworks软件绘制虚拟样机,进行模型验证,各零部件之间不存在干涉现象.该机可一次性完成2行马铃薯的挖掘、土薯分离、薯秧、杂草和残膜分离、垂直提升以及装袋等工序,克服了马铃薯收获机装袋技术难题,提高了生产效率.
【总页数】5页(P263-267)
【作者】史明明;魏宏安;胡忠强;刘星;杨小平
【作者单位】甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070;甘肃农业大学工学院,甘肃兰州730070
【正文语种】中文
【中图分类】S225.7+1
【相关文献】
1.4M-2型马铃薯联合收获机土薯分离运动仿真 [J], 张建;魏宏安
2.4UL1型牵引式马铃薯联合收获机的打秧装置 [J], 柳春柱;熊文江;杨柏松;刘兆丰
3.4UFD-1400A1型马铃薯联合收获机的试验研究 [J], 姜彦武;艾力·哈斯木;魏宏安;史明明
4.中机美诺1710A型马铃薯联合收获机 [J],
5.中机美诺1710A型马铃薯联合收获机 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
4UFD—1400型马铃薯联合收获机功能原理的设计
4UFD—1400型马铃薯联合收获机功能原理的设计
杨小平;史明明;魏宏安;赵武云
【期刊名称】《中国农机化学报》
【年(卷),期】2013(34)5
【摘要】通过对马铃薯产业及市场进行调研分析,明确了马铃薯机械化生产的重要性,提出相关设计要求。
为了使4UFD—1400型马铃薯联合收获机的设计和研发建立在科学的基础上,本研究采用设计方法学相关内容对其进行功能原理设计。
在明确设计任务的基础上,对4UFD—1400型马铃薯联合收获机进行功能划分和功能分析,建立了总功能图和功能结构图。
采用简单评价法中的名次计分法对筛选出的几个方案进行评价,确定了最优方案组合,为该机生产提供理论依据。
【总页数】5页(P109-113)
【关键词】马铃薯;联合收获机;机械设计方法
【作者】杨小平;史明明;魏宏安;赵武云
【作者单位】甘肃农业大学工学院
【正文语种】中文
【中图分类】S225.71
【相关文献】
1.4UFD-1400型马铃薯联合收获机薯秧分离装置设计 [J], 孙广辉;魏宏安;李彦晶;刘星
2.4U-1400型马铃薯联合收获机的设计 [J], 史明明;魏宏安;胡忠强;刘星;杨小平
3.4UFD -1400A1型薯类联合收获机提升装置运动分析与仿真 [J], 刘星;魏宏安;杨小平;李彦晶;孙广辉;胡忠强;史明明
4.4UFD-1400型马铃薯联合收获机改进设计与试验 [J], 魏宏安;张俊莲;杨小平;黄晓鹏;戴立勋;孙广辉;刘星
5.4UFD―1400型马铃薯联合收获机挖掘装置的设计及有限元分析 [J], 杨小平;魏宏安;赵武云;张克平;戴飞
因版权原因,仅展示原文概要,查看原文内容请购买。
4UMS-900型木薯收获机的研制
中图 分 类 号 : ¥ 2 2 5 . 7 1 文献标志码 : A 文章编号 : 1 0 0 2—1 3 0 2( 2 0 1 3 ) 1 0—0 3 6 7— 0 2
1 . 2 工作 原理
挖掘铲 由固定 支架 、 翼铲、 入土铲和延伸板等组成。固定 支架 由 2块 6 5 0 m m x 1 5 0 mi l l x3 2 mm钢板焊接在 固定板上 ,
并通过镙 栓与 机架 联接 。翼 铲 由 1块 9 1 0 m i l l X 1 3 0 m i l l x
成本高等缺点 , 不能全程 机械化作业成 为制约 木薯产业 的瓶
颈, 开拓木薯产业发 展的关键 在于实 现机械化 。当前制 约木
薯产业 的主要是收获 , 由于木薯块 根不易久存 , 如果在收获季 节不能及 时收获 , 其块茎将 霉变 , 导致薯农亏损 , 再加上 木薯 块茎较大 , 在地表下 的分 布不规则 , 且 肉质松脆 , 从 而致 使块 根收获时极易 受损 。而 机械化 收获 木薯 可提 高劳 动生产 效 率, 减 轻劳动强 度 j 。因此 , 设计 了 4 U MS一9 0 0型木薯 收 获机 以期实现降低 作业成本 , 提高作业效率 。
1 6 3 0 o 3 2 O 1 2 o 4 1 ) 。
2 . 1 . 1 铲面倾角
铲 面倾 角 的选择应根 据土壤硬 度及
作者简介 : 张意松( 1 9 6 3 一) , 男, 广东 揭西人 , 助理 工程师 , 研究方 向 为热带农业机械化技术与装备。E— ma i 1 : 7 5 7 3 2 7 5 3 6 @q q . c o n。 r 通信作者 : 黄 晖, 副研究员 , 硕士生导师 , 研究方 向为热带农业机 械 化技术与装备 。E—m a i l : h u i h u a n g / i @2 l e a . C 三点悬 挂; 总工作幅度为 1 4 0 0—1 7 0 0 m m; 伤薯
科技成果——马铃薯联合收获技术与装备

科技成果——马铃薯联合收获技术与装备技术开发单位山东思代尔农业装备有限公司成果简介随着国内马铃薯种植面积的不断扩大,对马铃薯收获机械需求十分迫切,但目前国内大部分收获均为阶段式收获,即收获后需要大量的人工捡拾,劳动强度大,效率低。
为此申报单位对马铃薯联合收获技术进行突破,已授权发明专利2项,软件著作权2项,荣获德州市科学技术奖二等奖1项。
技术特点(1)可根据不同土壤、不同品种的减损收获农艺要求,调整挖掘深度、垄上压力等作业状态,调整方便快捷;(2)可根据不同土壤类型、不同品种的薯土分离要求,调整薯土分离模式及状态;(3)可实时检测作业速度、地轮转向、垄上压力、薯土分离状态等作业信息,并根据作业信息的变化,实时调控作业状态,实现了收获作业的可控性;(4)主要性能指标达到:损失率≤4%;伤薯率≤2%;破皮率≤3%;含杂率≤4%;作业行数两垄/单垄。
创新性(1)研发多模式马铃薯减损挖掘技术与装置基于垄作马铃薯地下分布特性,深入收获机挖掘装置入土部件与土壤颗粒之间的运动学关系,模拟挖掘装置入土部件对土壤颗粒的扰动规律,研制多模式马铃薯减损挖掘装置,避免由于挖掘深度不足所造成的马铃薯损伤或挖掘深度过大和“薯-土”分离工作量过大而导致的能源浪费。
(2)研发高频低幅分离技术及薯土分离、输送装置研究“薯-薯”、“薯-机”之间的碰撞、摩擦规律和流动特性,明确马铃薯表皮土壤附着力学特性,探讨马铃薯胶质层破裂和机械损伤临界理论,建立“薯-机”收获系统的动力学模型,研制一种基于高频低幅技术的薯土多级分离装置和智能伸缩控制集薯输送装置,以最大限度减小对马铃薯的损伤,并实现输送过程中马铃薯表皮的自动清洁。
(3)研发马铃薯高效低损联合收获综合智能控制系统提出动态自适应的调控方法,研发马铃薯收获智能监测技术、马铃薯收获机自动调控技术等关键技术,研发马铃薯高效低损联合收获综合智能控制技术与操控系统,可实时调整作业状态,实现了收获作业的可知性、可视性和可控性。
4UFD–1400型马铃薯联合收获机薯秧分离装置设计与试验研究
4UFD–1400型马铃薯联合收获机薯秧分离装置设计与试验研究4UFD–1400型马铃薯联合收获机薯秧分离装置设计与试验研究摘要:本文主要研究了4UFD–1400型马铃薯联合收获机薯秧分离装置的设计和试验。
通过分析马铃薯的种植和收获过程中存在的问题,设计了一种新型的薯秧分离装置,并进行了相应的试验验证。
试验结果表明,新型装置能够有效地分离马铃薯薯秧,提高了收获效率和质量。
关键词:马铃薯联合收获机、薯秧分离、设计、试验研究 1. 引言马铃薯是世界上重要的食用作物之一,对于国内农业生产和粮食安全具有重要意义。
在马铃薯的种植过程中,薯秧的分离是一个重要的环节。
传统的人工分离方法效率低、成本高,难以满足大面积种植需求。
因此,研究一种高效、自动化的薯秧分离装置对提高马铃薯种植效率具有重要意义。
2. 物理参数分析和设计方案根据马铃薯薯秧的特点和分离过程中存在的问题,我们设计了一种基于物理力学原理的薯秧分离装置。
该装置主要由输送带、分离器、抖动器和控制系统组成。
在设计过程中,我们考虑了马铃薯的形状、尺寸、重量等物理参数,以及分离速度和分离效果等因素。
3. 装置试验为了验证新型薯秧分离装置的效果,我们进行了一系列试验。
首先,我们使用不同类型和尺寸的马铃薯对装置进行了测试。
试验结果表明,装置能够适应不同类型和尺寸的马铃薯,并且具有较好的分离效果。
其次,我们对装置的分离效率进行了测定。
结果显示,新型装置的分离效率明显高于传统的人工分离方法,能够有效地提高收获效率。
最后,我们对装置进行了稳定性和耐用性的测试,结果显示装置具有较好的稳定性和耐用性,能够适应长时间、大面积的使用需求。
4. 结果与分析通过试验研究,我们得出了以下结论:4UFD–1400型马铃薯联合收获机薯秧分离装置能够有效地分离马铃薯薯秧,提高了收获效率和质量。
该装置具有良好的适应性,能够适用于不同类型和尺寸的马铃薯。
同时,装置具有较高的稳定性和耐用性,能够满足长时间、大面积的使用需求。
4UJ-1400马铃薯捡拾机的研制

4UJ-1400马铃薯捡拾机的研制杨金砖;李国民;刘兴博;陈维刚【摘要】挖掘放铺后的马铃薯虽然大部分裸露在田间地表,但依然存在与土块、薯秧等不分层次的混杂现象,在土壤黏重地区甚至会有一半又重埋进土壤里,即使人工捡拾往往也要动用耙类工具辅助分离,如果操作不当又会伤薯,费工费力.因此,急需一款马铃薯捡拾机代替人工完成捡拾、分离和装袋(装车),从而提高工作效率,节省劳动力.4UJ-1400马铃薯拣拾机是在马铃薯挖掘机将马铃薯挖掘条铺后,进行集中捡拾、除杂、装袋作业.具有捡拾率高、作业速度快、结构紧凑、重量轻、动力消耗小、不伤薯等特点.该机带有强制推送装置,能将马铃薯进行大角度提升,除土效果好,还带有除杂草功能.机具两侧带有踏板,便于人工分拣、除杂操作.【期刊名称】《农机使用与维修》【年(卷),期】2019(000)002【总页数】3页(P5-7)【关键词】捡拾;分离;除杂;装袋【作者】杨金砖;李国民;刘兴博;陈维刚【作者单位】黑龙江省农业机械工程科学研究院,哈尔滨150081;黑龙江省农业机械工程科学研究院,哈尔滨150081;黑龙江省农业机械工程科学研究院,哈尔滨150081;黑龙江省农业机械工程科学研究院,哈尔滨150081【正文语种】中文【中图分类】S2250 引言目前,我国马铃薯主产区广泛采用机械挖掘、人工捡拾、分级装袋(装运上车)的分段收获模式,主要因为收获过程中普遍存在薯土分离、薯秧分离、薯杂分离、薯薯分级难的现实问题,简化了收获机械结构,加快了半机械化(挖掘放铺)作业方式的推广。
然而,随着人工成本的大幅上升以及农忙时节劳动力严重短缺等问题越发突出,广大种植户迫切需要机械化解决挖掘后的人工捡拾装袋装车等问题。
为此,我们通过对捡拾、分离、装袋(装车)等关键部件的创新设计及试验研究,确定了可适应不同地区、不同土壤条件、不同品种以及不同种植模式的新型零部件,开发出适合规模化种植要求且能与现有大多数挖掘机配套的马铃薯捡拾机,解决了马铃薯收获过程中以机械代替人工捡拾的关键性技术难题。
塔山牌4U型薯类(药材)收获机

塔山牌4U型薯类(药材)收获机
寒一
【期刊名称】《农机推广与安全》
【年(卷),期】2006()11
【摘要】由山西省襄汾县新城凤鸣农机制造厂生产的塔山牌4U—Ⅱ型薯类(药材)收获机,目前已通过国家鉴定,并获国家专利(专利号:ZL022683437),进入
山西省农机购置补贴产品目录。
【总页数】1页(P43-43)
【关键词】薯类收获机;农机购置补贴;U型;国家鉴定;国家专利
【作者】寒一
【作者单位】
【正文语种】中文
【中图分类】S225.92
【相关文献】
1.BZ200型针式精量播种机/塔山牌4U型薯类(药材)收获机 [J],
2.4U一Ⅱ型薯类挖掘机 [J],
3.塔山牌4U型薯类(药材)收获机 [J],
4.4U—1400型薯类联合收获机刮板输送装置的设计 [J], 彭正昶;陆祥辉;牛旭东;
刘尔玺
5.4U系列悬挂式薯类作物收获机 [J], 孙义忠
因版权原因,仅展示原文概要,查看原文内容请购买。
万福4U-1型马铃薯收获机

万福4U-1型马铃薯收获机
佚名
【期刊名称】《农业机械》
【年(卷),期】2008(0)29
【摘要】万福4U-1型马铃薯收获机,是同功率≥18kW拖拉机配套使用的薯类作物收获作业机具。
适用于干旱、半干旱地区的马铃薯收获作业。
可一次完成挖掘、薯土分离和薯块铺放(成条状)等工序,具有结构简单、性能稳定及作业效率高等特点。
【总页数】1页(P43-43)
【关键词】马铃薯收获机;半干旱地区;作业机具;作物收获;配套使用;收获作业;性能稳定;拖拉机
【正文语种】中文
【中图分类】S225.71;S625.3
【相关文献】
1.4U-1型马铃薯收获机的调整与使用 [J], 杨建村
2.4SL-650A型多功能马铃薯收获机·4U-1/2型马铃薯(块茎类)挖掘机 [J],
3.SE170-60型马铃薯收获机与1600型马铃薯收获机作业对比分析 [J], 韩文锋;刘怀山;宋宝玉;
4.辽西地区4U-1(2)型苦参收获机的研发与推广 [J], 张立明;赵显明;宁向阳;翟春华;赵艳艳;袁晓丽;高艳华;韩春旭;米艳春
5.4U-1型马铃薯收获机 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4UFD-1400A1薯类联合收获机简介4UFD-1400A1薯类联合收获机由甘肃农业大学研发设计,兰飞赛奥机械有限责任公司制造,甘肃农业大学监制。
该机配套动力44-58.8kW 拖拉机,半悬挂式,作业幅宽1400mm, 纯工作时间生产率5~8亩/小时,外形尺寸(长×宽×高) 4700 mm×2000 mm×2050 mm,结构质量2050kg ,作业深度0 ~300 mm(可调),属于中型薯类联合收获机。
整机由仿形碎土装置、切土挖掘装置、土薯分离装置、茎秆分离装置、薯块提升装置、薯块分级装袋装置、传动系统、液压操纵装置以及机架、地轮等部分组成,可一次完成薯类挖掘、土薯分离、茎秆、杂草及地膜分离、薯块输送升运、薯块分级、装袋等作业,大幅度减少了薯类收获的人工耗费,减轻了劳动强度,显著提高了生产效率。
该机挖掘铲入土和碎土能力强,挖掘深度在0~300mm范围内可方便调节;机架及挖掘装置总成由驾驶员通过拖拉机液压悬挂装置和液压输出控制其升降,操作方便,且保证不同挖掘深度下收获机纵向呈水平状态和挖掘铲入土性能不变;茎秆分离装置分离能力强,对茎秆、杂草及地膜的分离效果好,可在不打秧、不除膜的条件下不缠绕、不堵塞地顺利作业;分级装置能根据不同分级需要进行调节,满足对薯块的不同分级要求。
该机整体功能、原理和结构上突破了传统马铃薯联合收获机的设计,填补了我国分级装袋式薯类联合收获机的空白,整机获得国家发明专利,样机2010年12月通过省科技厅组织的科技成果鉴定,鉴定结论:该成果达到同类研究的国内领先水平。
该机适用于旱地(覆膜)平播、垄播薯类联合收获作业。