雷尼绍测头培训
雷尼绍测头培训ppt课件
算数和逻辑运算(一)
功能
定义
格式
#i=#j
加法 减法 乘法 除法
#i=#j+#k #i=#j-#k #i=#j*#k #i=#j/#k
正弦 反正弦
正切 反正切
余弦 反余弦
#i=SIN[#j] #i=ASIN[#j] #i=TAN[#j] #i=ATAN[#j]/[#k] #i=COS[#j] #i=ACOS[#j]
校正测针X/Y偏置
格式:G65 P9802 Dd 举例:G65 P9802 D50.005 Dd: 用于校正的环规直径
4
1
2
#503
#502 Y
3 X
Dd
O1000 G17 G40 G49 G69 G80 G90 G54 X0 Y0(环规中心) G65 P9802 D50.005 G91 G28 Z0 G90 M30 注意: 1.准确将主轴定位至环规的中心位置 并将测针置于环规内部 2. 程序运行后,会将偏心写入#502 和#503
#530 标准校正#5数40 值
#531 回退系#5数41
#532
#542
矢量校正数值
#533
#543
#534
#544
#535
#545
#536
#546
#537
#547
#538
#548
#539
#549
测头校正程序
为什么要校正
测头安装后,测头中心与主轴的偏心量 测针球的直径误差 测头的触发距离 机床的重复性 所以,每次更换测头,或者更换测针后,必须 校正!! 如何校正?软件部分再讲
#5201-#5203 #5221-#5223 #5241-#5243 #5261-#5263
雷尼绍测头培训PPT课件

所以》 M98不能在调用时指定变量的值,而G65可以
那么G65后面跟的一大堆字母表示的是什么意思呢?
Slide 17
.
G65和M98的差别(一)
变量表
异或
#i=#j XOR #k
与
#i= #j AND #k
蓝色字体为不常用运算符 Slide 9 所有运算格式要正确
备注
运算按照二进制一位一 位的进行
.
测试一
可以把G55的坐标值写入全局变量吗?局部变量呢? • 怎么写? • 两个有什么差异?
我可以给G55的坐标赋值吗? • 怎么写? • 有什么用处?
备注
#k不为0 角度以度指定 90.5表示90度30分
.
算数和逻辑运算(二)
功能
平方根 绝对值
格式
#i=SQRT[#j] #i=ABS[#j]
舍入 上取整 下取整 自然对数 指数对数
#i=ROUND[#j] #i=FIX[#j] #i=FUP[#j] #i=LN[#j] #i=EXP[#j]
或
#i=#j OR #k
#120 #121 #122 #123 #124 #125 #126 #127 #128 #129
用户#1可30 用变量 #140
#131
#141
#132
#142
#133
#143
#134
#144
#135
#145
#136
#146
#137
#147
#138
#148
#139
测头使用基本操作流程

雷尼绍工件测头使用标准作业流程雷尼绍提供的机床工件测头是精密的高价值的找正检测装置,使用测头进行测量是需要执行相关的测量程序,使测头在主轴上沿相应的机床路径行走来实现的,而机床的运行又是速度快、刚性强的动作,此外,工件和夹具的情况又是各不相同,因此,在使用操作测头进行测量的过程中需要注意正确性、安全性及测量的实际工艺性。
测头使用的基本原则1、一般情况下,请将测头保留在刀库中,除特殊情况外,不要将测头从刀库中取下;如有特殊情况必须取下测头,则在将测头重新装回刀库后,必须重新对测头进行标定,否则将影响测量结果的准确性;注意:刀具必须放回到原始的刀位中,否则在测量、加工中将有造成撞刀或测头撞毁的风险!2、一般情况下,使用测头的设备不要随意更换加工工件品种;如果确实需要更换加工工种,则必须有经过Renishaw测头使用培训的、对新工件的测头测量程序十分了解的人员来作业,在试做完一个零件完整无误后方可正式量产作业;注意:需检查确认新工件加工测量程序中使用的坐标系(如:G54,G55等) 的原点机械坐标位置值的正确性!否则在测量、加工中将有造成撞刀或测头撞毁的风险!3、一般情况下,不要随意对刀补值及工件坐标系进行编辑修改操作,如需进行此类操作,最后需确认测头相应的刀补值以及测量程序中使用的工件坐标系原点值是否有由于误操作造成的错误改动。
如有误操作造成的错误改动,需改回正确的数值,否则将有造成测头撞毁的危险!4、若信号接受器(OMI)没有故障,请务必不要将接受器从机床上拆下,否则,若该机床仍然使用测头测量将很可能造成测头撞毁;另外,再次恢复接线也可能出错,造成不可预料的后果!5、使用测头测量时,切削进给速度的倍率需置于100%,否则测量的精确性将可能受到一定的影响;6、一般情况下,不要对变量进行编辑,否则可能的误操作将造成相关数据的改动,影响测头的测量精度;7、由于是量产加工,工件品种单一,工装夹具定位工件位置稳定,可能的话,建议将所有包含测头测量的加工程序均设为“写保护”,以保证不会因误操作致使程序数据变更,形成潜在的安全隐患;8、若程序在执行测量的过程中出现意外停机,需复位设备,然后手动将测头抬至相当的安全高度后,重新从头开始执行程序!否则,将有测头撞击的危险!9、若程序在执行加工的过程中出现意外停机,建议将该工件报废,若需要重新加工,必须只执行程序的加工部分,若仍然执行了程序测量的部分,则可能会出现测头报警、撞刀或工件最终尺寸不合格的情况;10、对设备进行过大的维护维修后,特别是涉及电控柜布线、接线的维护后,重新开机后必须确认检查测头的功能是否依然有效;方法:在MDI模式下,M06指令调出测头后;先单独执行M450; 检查测头是否被打开;若测头灯亮,则再执行G91G132X100.F20; 在运行期间用手触碰测针,检查是否X轴停止动作。
哈斯雷尼绍测头编程手册说明书

We use cookies to improve your user experience. Our Cookie Notice describes which cookies we use, why we use them, and how you can find more information about them. Please confirm you consent to us using analytics cookies. If you do not consent, you may still use our website with a reduced user experience. Skip navigationProductsIndustriesSolutionsSupportNewsOur companyBuy onlineContact usOnline formSubmit requests and enquiries online.Worldwide officesWe have offices in 36 countries around the globe. Find the right office to meet your needs.Supplier portalInformation for suppliers, or potential suppliers, to Renishaw. File size: 1.07 MB Language: English Part number: H-2000-6929 Please sign in or create a MyRenisile. A MyRenishaw account will give you quick access to additional content from Renishaw and enable you to manage your preferences. We use cookies to improve your user experience. Our Cookie Notice describes which cookies we use, why we use them, and how you can find more information about them. Please confirm you consent to us using analytics cookies. If you do not consent, you may still use our website with a reduced user experience. Skip navigationProductsIndustriesSolutionsSupportNewsOur companyBuy onlineContact usOnline formSubmit requests and enquiries online.Worldwide officesWe have offices in 36 countries around the globe. Find the right office to meet your needs.Supplier portalInformation for suppliers, or potential suppliers, to Renishaw. Omitir navegaciónProductosSectoresSolucionesServicio técnicoNoticiasNuestra empresaComprar en InternetContacte con nosotros
雷尼绍无线电测头安全操作及保养规程

雷尼绍无线电测头安全操作及保养规程雷尼绍无线电测头(以下简称“测头”)是一种高精度电子测试设备,广泛应用于电子工程和机械工程领域的测量和检测中。
测头具有高灵敏度、高精度、高速度等特点,在使用时需要严格遵守一系列操作规程,以确保仪器正常运行、检测数据准确。
本文将阐述雷尼绍无线电测头的安全操作及保养规程。
1. 安全操作规程1.1 选用适当的测量范围和放大倍数在进行测量之前,要根据实际需求和测量环境选择合适的测量范围和放大倍数。
如果选择不当,会导致数据不准确、测头损坏等问题。
建议在使用前仔细阅读测头的说明书,了解仪器的技术参数和性能特点。
1.2 正确连接设备和测量电路在测量过程中应严格按照说明书的操作步骤进行,确保设备和测量电路的正常连接。
如若操作不当,可能会对测头造成损坏。
建议在连接设备和测量电路前检测设备和电路的状态,确保它们的可靠性。
1.3 防止测头受到电磁场干扰在使用时,应尽量避免测头受到电磁场的干扰。
如若遇到干扰,建议在调整测头放大倍数或者调整测量方向等方面进行调整,以保证数据的准确和仪器的正常运行。
当使用测头时,请保持周围的环境干净、整洁,降低电磁场、尘埃等物质对设备的影响。
1.4 避免测头受到机械力、振动等影响雷尼绍无线电测头是一种高精度的测试设备,容易受到机械力、振动等影响。
在使用测头的时候,请避免使用过于粗暴的操作方式,确保仪器的稳定性和准确性。
建议在使用前检查相应的支架、夹具等固定设备,以确保会有机械力、振动等因素对设备的影响。
1.5 避免测头受到静电干扰在干燥的环境、静电场较强的场合中,很容易使测头受到静电干扰。
因此,在使用时应使用导电的手套和地线等设备,以减小静电场对设备的影响,并确保安全操作。
1.6 保持测头干燥、清洁雷尼绍无线电测头本身是一种高精度、高灵敏度的设备,它的工作原理需要在低噪声环境中进行。
如果在遇到潮湿、不干净的环境,将会在极大程度上影响设备的使用寿命和准确性。
数控CNC行业中雷尼绍探头应用与编程
目前大量先进的CNC数控设备都配备了测头系统,我们熟知的有雷尼绍探头、海克斯康、波龙、马波斯。
使用测头的好处有很多,比如,可以对工件进行自动找正、序中测量、序后检测,既能缩短工件的准备时间,又能在生产中实现自动调整加工,大大提升设备的自动化程度,减少工件不良和报废,微信公众号:CNCaction (cnc实战技术)就这一情况,做出了一个决定,就是录了全网唯一的一部有关这方面的视频,以下是其中的一些知识内容,供大家参考。
如下面所示的是探头内部的一个程序内容,但具体是什么意思?相信很多人都搞不懂,所以就会在工作中碰到问题时不知所措。
O9810(REN*PROTECTED*POSN)G65P9724IF[#9NE#0]GOTO3IF[#117NE#0]GOTO2#3000=88(NO*FEED*RATE)N2#9=#117N3#117=#9#148=0N4G31X#24Y#25Z#26F#9IF[#24EQ#0]GOTO5IF[ABS[#5041-[#24]]GT#123]GOTO8N5IF[#25EQ#0]GOTO6IF[ABS[#5042-[#25]]GT#123]GOTO8N6IF[#26EQ#0]GOTO7IF[ABS[[#5043-#116]-[#26]]GT#123]GOTO8N7GOTO9N8#148=7.IF[#13EQ1.]GOTO9#3000=86(PATH*OBSTRUCTED)N9M99%视频讲解了下面目录内容一、宏程序1、变量2、运算指令3、控制指令4、练习举例5、系统指令6、宏程序使用二、雷尼绍探头使用培训1、探头内部程序及要用到的各种变量的作用讲解2、算数和逻辑讲解3、程序调用4、探头快速校正讲解5、电池更换6、探头各种颜色指示灯的意义7、工作模式的设置8、探头各种报警的意义讲解及应对解决9、探头状态说明三、雷尼绍探头编程1、讲解各种探测的思路、方法2、分析使用正确的探测程序3、调用探测到的数据并在加工中灵活运用4、各探头程序的应用与编程5、实际编程案例6、其它……。
雷尼绍 (1)
J
K
#5
#6
U
V
#21
#22
#32
#33
* 不允许作为输入地址使用
系统变量
变量 #2001 to #2299 #10001 to #10512 #5061 #5062 #5063 #5201, #5202, #5203 to #5208 #5221, #5222, #5223 to #5228 #5241, #5242, #5243 to #5248 #5261, #5262, #5263 to #5268 #5281, #5282, #5283 to #5288 #5301, #5302, #5303 to #5308 #5321, #5322, #5323 to #5328 #5001, #5002, #5003 to #5008 描述 Tool offsets Tool offsets option Probe skip position X Y Z External work offset G54 work offset G55 work offset G56 work offset G57 work offset G58 work offset G59 work offset End block point
Green-Point Training
• • • • • 雷尼绍工件测头OMP40-2,OMI在FANUC机床上的安装 雷尼绍程序说明 雷尼绍测头校准 宏变量 宏程序分析说明
4/20/2016
Slide 1
OMP40-2和OMI
4/20/2016
Slide 2
硬件安装说明
一.工件测头与刀柄及探针的组装 1)将测头装入刀柄,拧紧刀柄上2固定螺丝 2)将电池及测针装在测头上 3)将测头装入主轴,用千分表打测针球中心(0.005) 具体通过调整刀柄上4个方向的螺丝来确定球中心 二.接受器OMI安装 1)装上支架 2)套上保护管 3)将接受器固定在机床某个位置,使接受器对 准主轴方向,确保其传输良好
雷尼绍使用手册
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
雷尼绍工件测头应用-网络版
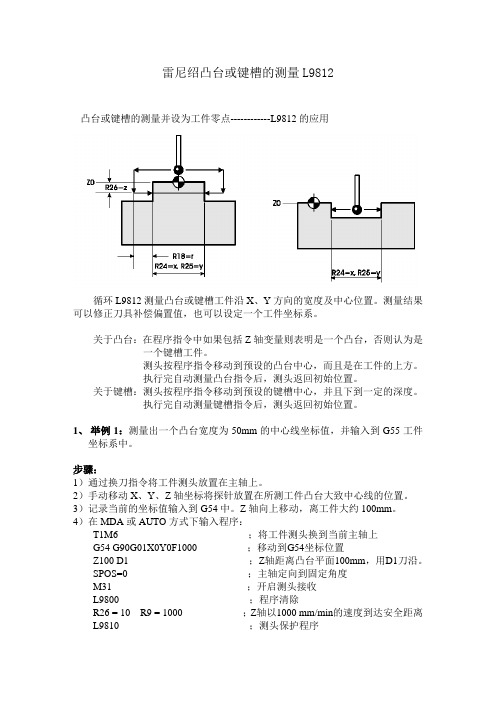
雷尼绍凸台或键槽的测量L9812凸台或键槽的测量并设为工件零点------------L9812的应用循环L9812测量凸台或键槽工件沿X、Y方向的宽度及中心位置。
测量结果可以修正刀具补偿偏置值,也可以设定一个工件坐标系。
关于凸台:在程序指令中如果包括Z轴变量则表明是一个凸台,否则认为是一个键槽工件。
测头按程序指令移动到预设的凸台中心,而且是在工件的上方。
执行完自动测量凸台指令后,测头返回初始位置。
关于键槽:测头按程序指令移动到预设的键槽中心,并且下到一定的深度。
执行完自动测量键槽指令后,测头返回初始位置。
1、举例1:测量出一个凸台宽度为50mm的中心线坐标值,并输入到G55工件坐标系中。
步骤:1)通过换刀指令将工件测头放置在主轴上。
2)手动移动X、Y、Z轴坐标将探针放置在所测工件凸台大致中心线的位置。
3)记录当前的坐标值输入到G54中。
Z轴向上移动,离工件大约100mm。
4)在MDA或AUTO方式下输入程序:T1M6 ;将工件测头换到当前主轴上G54 G90G01X0Y0F1000 ;移动到G54坐标位置Z100 D1 ;Z轴距离凸台平面100mm,用D1刀沿。
SPOS=0 ;主轴定向到固定角度M31 ;开启测头接收L9800 ;程序清除R26 = 10 R9 = 1000 ;Z轴以1000 mm/min的速度到达安全距离L9810 ;测头保护程序R24 = 50 R26 = -10 R19 = 2 ;X轴移到凸台的外端,Z轴下深10mm,值将记录到G55中。
L9812 ;自动执行测量。
R26 = 100 ;Z轴测量完毕升到100mm处。
L9810 ;测头保护程序M32 ;关闭测头M30 ;程序结束5)步骤执行图解:。
雷尼绍MIH系列手动测头说明书
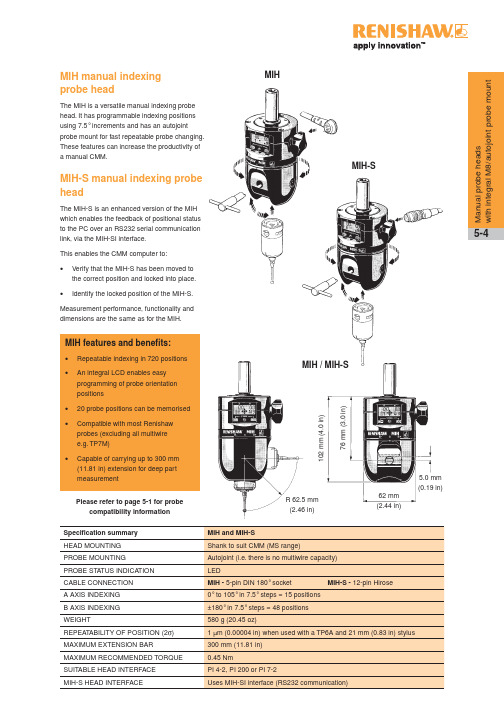
MIH
MIH-S
MIH features and benefits:
• Repeatable indexing in 720 positions
• Capable of carrying up to 300 mm (11.81 in) extension for deep part measurement
Please refer to page 5-1 for probe compatibility information
MIH / MIH-S
MIH manual indexing probe head
The MIH is a versatile manual indexing probe head. It has programmable indexing positions using 7.5° increments and has an autojoint probe mount for fast repeatable probe changing. These features can increase the productivity of a manual CMM.
• An integral LCD enables easy programming of probe orientation positions
• 20 probe positions can be memorised
• Compatible with most Renishaw probes (excluding all multiwire e.g. TP7M)
三坐标测头:雷尼绍MCP手动测头技术参数

三坐标测头:雷尼绍MCP手动旋转测头
三坐标测头是进行测量时最重要的部分之一,现在行业内使用最多的就是雷尼绍的三坐标测头。
MCP手动旋转测头是一款性价比高的手动测头,是英国Renishaw公司高精度电子触发测头,精度高,故障率低,寿命长。
以下是他的一些技术参数:
型号:HK-0100-0001 雷尼绍MCP手动测头
1、适应情况手动及机动型测量机
2、技术指标
长度:50mm
直径:30mm
安装:柄测杆
安装:螺纹M3
触发方向:5向(±X ±Y - Z)
各向重复精度:0.75 μm
测力:12g
最大预行程(X-Y):5 μm
最大超行程:±20(X-Y),5mm(Z)
寿命:大于100万次
3、具体配置:MCP测头体Φ2*20 红宝石直测针Φ3*20 红宝石直测针尖测针弯测针测针加长杆20mm 万向转头专用电缆
了解更多三坐标测头的技术参数请到:/ /。
雷尼绍测头使用经验总结

//优先级别:红、绿、蓝、黑1.测头刀长有补偿路径时需要将测头刀长设为基准刀长,且测头刀长不能虚设必须为其实际刀长。
由于测头不能在对刀仪上进行对刀,要想利用已知的刀具长度进行计算,只需要在同一个基准面上进行对刀,得到的Z向原点差值即为刀长之差。
1.在刀具设置中将“对刀基准与对刀仪原点间距”和“机外对刀刀长换算参数”清零;2.使用测头在工件表面对刀,记下机床坐标Z1;3.换刀,用一把加工刀具在工件表面同样位置对刀记下机床坐标Z2;4.对刀设为当前刀具刀长,并在刀具设置中记下刀长Z35.测头刀长=Z3-(Z2-Z1);一般测头比加工刀具长,所以算出的测头刀长的绝对值小于加工刀具刀长的绝对值。
在45系统T213版本的升级说明中给出了刀具参数的设置流程,有些同事只知其然,不知其所以然,其实只要理解了刀具长度的换算关系,不止一种方法可以得到测头刀长。
2.测头使用过程中常见的异常报警1)b08-c:12位扩展输入信号暂停。
可能是测头信号设置错误、接收器被遮挡、在移动过程中碰到障碍物或者电量不足。
测头电量不足时,马波斯测头信号灯黄橙闪烁,雷尼绍测头蓝绿或蓝色闪烁。
2)310-0:碰触过程中没有发现任何信号。
需要修正测量点位置或者增大探测距离,目前45系统中允许的最大探测距离为40mm。
3)313-100:碰触回退后信号未消除。
说明回退距离太小或者搜索速度过大,两者之间的数值关系应为:回退距离=搜索速度/2+0.05。
一般建议首次测量速度不小于0.4mm,45系统中默认的是两次触碰模式,即先以搜索速度碰触到工件后再回退一段距离,然后以准确测量速度进行探测,第二次触碰到的位置才会保存在测量结果中;使用单次触碰模式可以提高探测效率,但测量精度会下降,可在一些对测量精度要求不高的情况下使用。
4)311-0:测头信号异常。
需要确认当前测头状态是否正确。
5)路径类型与刀具类型不符。
探测路径使用的刀具必须与设备参数设置里接触式测头设置的占用刀位一致。
雷尼绍测头培训PPT参考幻灯片

Slide 25
#130 #131 #132 #133 #134 #135 #136 #137 #138 #139
#140 #141 #142 #143 #144 #145 #146 #147 #148 #149
全局变量(三)
#100
#110
#120
#130
#140 0
#101
#111
#121
#131
Slide 31
O1000 G17 G40 G49 G69 G80 G90 G54 X0 Y0 G43 H21 Z20. G65 P9801 Z0 T21 G91 G28 Z0 G90 M30 注意:在这里T21的刀补中要有 一个预置的大概刀长
校正测针X/Y偏置
格式:G65 P9802 Dd 举例:G65 P9802 D50.005 Dd: 用于校正的环规直径
小结
对于初学者,以下变量范围,建议先不用: • #100-#199 • #500-#550
其他全局变量可按需要使用
测头使用必须要标定 • 初次使用时 • 更换测针后 • 使用一段时间后 • 标定后,挂刀方向要固定 • 标定时的进给与测量的进给保持一致
Slide 34
休 息 会?
Slide 35
每次只能指定X/Y/Z中的一个值 举例: G65 P9811 X-1. G65 P9811 Z-5. G65 P9811 Y1.
常用格式:G65 P9811 Xx或Yy或Zz Xx Yy Zz:目标位置在当前坐标系 下的坐标
Slide 41
单点测量程序-O9811
常用扩展格式: G65 P9811 Xx或Yy或Zz [Ss Tt]
Slide 27
#510 #511 #512 #513 #514 #515 #516 #517 #518 #519
雷尼绍测头袖珍指南说明书
CNC 工具機測頭袖珍指南解決方案提升工件品質和精確度,提高 加工中心機的效率CNC 工具機測頭解決方案...袖珍指南內容本袖珍指南完整地介紹了 Renishaw 公司為 CNC 工具機而設計的主要產品,協助您加瞭解測頭量測可以為您帶來的營運效益。
“使用 Renishaw 公司提供的創新解決方案,可以縮短最多達90%的 設定時間”為什麼要使用測頭? 1使用 Renishaw 測頭量測系統的預期效益 3工件設定工件檢測刀具設定和破損刀具檢測功能強大的 PC-based 工件量測軟體支援巨集程式之測頭量測軟體產品/應用指南 5為什麼要使用測頭?時間就是金錢。
與其花時間人工手動設定工件位置和檢驗成品尺寸,不如將時間花在加工工作上。
Renishaw 測頭量測系統,可消除因手動設定及檢驗所造成的代價高昂的機器停機和工件報廢。
機器只有在持續生產良好品質的工件下,才是在創造利潤。
你有因停機而無法獲利的問題嗎?為什麼你大部分的機器會閒置達數小時?道理很簡單。
因為許多公司仍然使用人工手動方式來設定刀具和工件,並且使用機外檢驗的方式來進行加工成品尺寸之檢驗 — 兩者都是造成寶貴設備閒置的重要因素。
減少停機時間和廢品 — 增加機器加工時間和工件精度手動刀具設定、工件設定和檢測既耗時,又容易產生人為疏失。
直接在線上進行測頭量測,便不需要再使用外部的刀具設定儀、昂貴的夾治具和以槓桿千分錶進行手動設定。
線上測頭量測既快速且可靠,並且可以自動補正機械座標偏移量。
測頭量測軟體會自動對刀具長度和直徑、工件位置以及尺寸誤差進行補償。
Renishaw公司配備功能強大的套裝軟體,使用容易編輯的巨集程式進行刀具設定、工件設定和工件量測。
這些測頭量測循環程式,係依據工業標準格式編輯而成,可簡單地整合到加工程式中,並可使用標準機器程式代碼來呼叫使用。
Renishaw 公司的測頭普遍為世界各地的公司所採用,作為提升生產效率和改善工件品質的方法。
雷尼绍对刀仪使用培训教程幻灯片
3/24/2020 Slide 7
苏州摩恩信息技术有限公司
变量号 #520 #521 #522 #523 #524 #525 #526
描述 探头Z轴机械坐标位置: 探头+X轴机械坐标位置 探头-X轴机械坐标位置 探头+Y轴机械坐标位置 探头-Y轴机械坐标位置 探头Z轴机械坐标位置 Z轴长度误差值
3/24/2020 Slide 3
苏州摩恩信息技术有限公司
手动刀长测量(O9856)
• 以手动方式将刀具移到探头上方约 10mm 位置,执行此程式
G65 P9856 T2 ; G65 P9856 T2 D12 ;
未传入D参数,刀具不旋转
D:刀径的概略值(若刀径大于 #110,会偏移半径值再测量)
3/24/2020 Slide 4
苏州摩恩信息技术有限公司
自动刀长与刀径测量(O9857)
雷尼绍对刀仪TS27R使用培训
• 对刀仪探头坐标位置校正(O9855) • 手动刀长测量(O9856) • 自动刀长与刀径测量(O9857) • 刀具破损检测 (O9858)
校正
手动刀长测量
测量
自动刀长与刀径 测量
刀具破损检测
3/24/2020 Slide 1
苏州摩恩信息技术有限公司
对刀仪探头坐标位置校正(O9855)
• B:指定测量项目“ 1” -刀长测量;“ 2”-刀径测量;“ 3”-刀长和刀径测量 • D:刀具直径值
G65 P9857 Bb [Dd Tt Qq Hh Zz M1 ] [ ]可选参数
3/24/2020 Slide 5
苏州摩恩信息技术有限公司
自动刀长与刀径测量(O9857)
雷尼绍探头设定及使用
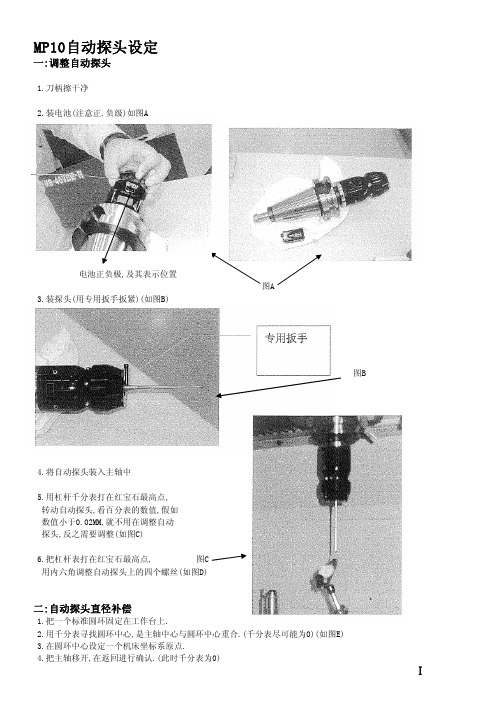
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。
雷尼绍无线电测头RMP60的使用
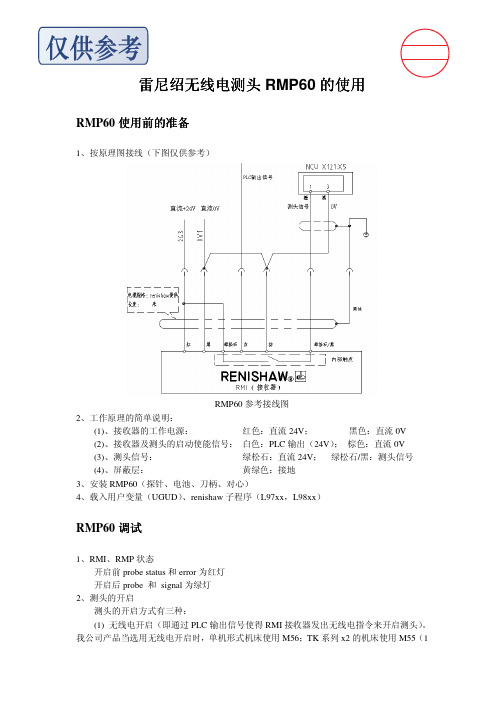
雷尼绍无线电测头RMP60的使用RMP60使用前的准备1、按原理图接线(下图仅供参考)RMP60参考接线图2、工作原理的简单说明:(1)、接收器的工作电源: 红色:直流24V ; 黑色:直流0V (2)、接收器及测头的启动使能信号: 白色:PLC 输出(24V ); 棕色:直流0V (3)、测头信号: 绿松石:直流24V ; 绿松石/黑:测头信号 (4)、屏蔽层: 黄绿色:接地 3、安装RMP60(探针、电池、刀柄、对心) 4、载入用户变量(UGUD )、renishaw 子程序(L97xx ,L98xx )RMP60调试1、RMI 、RMP 状态开启前probe status 和error 为红灯 开启后probe 和 signal 为绿灯 2、测头的开启测头的开启方式有三种:(1) 无线电开启(即通过PLC 输出信号使得RMI 接收器发出无线电指令来开启测头)。
我公司产品当选用无线电开启时,单机形式机床使用M56;TK 系列x2的机床使用M55(12008.12.10中捷机床有限公司技术部通道)M56(2通道)。
(2) 旋转开启(即将测头与刀柄连接后,装于主轴上,以要求的主轴转速开启测头)。
(3) 刀柄开关开启(即使用特殊刀柄,在刀柄上存在测头开启的开关,在测头装夹于主轴后,即可开启测头)。
如果对码不正确,则测头与接收器不能同步开启,并建立通讯。
对码过程参考第3步。
3、测头与接收器的对码步骤测头与接收器的对码步骤(1) RMI接收器断电(或者机床断电亦可)。
(2) 取出测头电池,按住测头探针,使其保持触发位置不动。
(3) 插入电池,按住测头探针不得松手,测头开始自检测,直至连续5次红色信号灯闪烁。
再松开探针。
(4) 在第一级菜单中,选择测头开启方式,以快速触发探针的方式进行开启方式的选择。
(5) 按压探针时间超过4秒,测头自动转入第二级菜单:测头关闭方式。
同样以快速触发探针的方式进行关闭方式的选择。
《雷尼绍测头培训》课件

测头的阻抗和传感输出
测头的阻抗和传感输出直 接影响到测量数据的准确 性和稳定性。了解这些特 点可以优化测头的使用效 果。
测头使用方法
1
连接设备和测头
将测头连接到相应的仪器设备并检查连接工作是否正确。
2
设置测头参数
根据需要进行参数设置,例如对灵敏度、灵活度等进行调整。
3
测量数据的获取和处理
根据实际需求选择相应的方法进行数据获取和处理,如数据分析、异常检测等。
测头的维护和保养
测头的清洁和保养
测头的清洁和保养是确保其 正常工作的必要条件,同时 还要注意防潮、防尘、防腐 等问题。
如何存储和保护测头
存储空间要安排妥当,杜绝 测头的震动、摔打、日晒等 可能造成损坏的行为。
常见问题和解决方法
如果出现故障或测量结果不 准确时,可以通过查询说明 书或向技术支持咨询解决方 法。
《雷尼绍测头培训》PPT 课件
本次课程将详细介绍雷尼绍测头的种类、特点及使用方法。欢迎大家参加。
雷尼绍测头简介
1 什么是雷尼绍测头?
雷尼绍测头是一种用于测量物理量的设备,可将物理量转换为电信号进行检测。
2 雷尼绍测头的应用领域
是温度、压力、位移、流量等各种物理量的检测,被广泛应用于电力、化工、石油、医 药等行业。
结论
雷尼绍测头的优点和适用范围
优点包括精度高、灵敏度高、可靠性好;适用范围广泛,是现代工业生产不可或缺的关键元 件。
测头的选型和使用建议
正确选型和合理使用测头可以最大化发挥其优势,提高测量精度和稳定性。
3 雷尼绍测头的优势和不足
优势包括敏感度高、精度高、可重复性好等;不足包括易受干扰、测量范围有限等。
测头的种类和特点
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#140 #141 #142 #143 #144 #145 #146 #147 #148 #149
全局变量(三)
#100
#110
#120
#130
#140 0
#101
#111
#121
#131
#141 0
#102 #103 #104
#112
#122
前言
变量基础部分
变量类型
用户 变量 变量
全局 变量
所有的宏程序中都可以共用的变量 #100-#199:掉电不保持 #500-#999:掉电保持
局部 只能在当前宏程序中使用的变量 变量 #1-#33
系统 变量
用来储存系统数据的变量,如刀补,位置等 #1000-
常用系统变量-工件坐标系
外部坐标系偏置 G54(1-3轴) G55(1-3轴) G56(1-3轴)
#5201-#5203 #5221-#5223 #5241-#5243 #5261-#5263
G57(1-3轴) G58(1-3轴) G59(1-3轴) G54.1P1(1-3轴) …… G54.1P48(1-3轴)
#5281-#5283 #5301-#5303 #5321-#5323 #7001-#7003
算数和逻辑运算(一)
功能
定义
格式
#i=#j
加法 减法 乘法 除法
#i=#j+#k #i=#j-#k #i=#j*#k #i=#j/#k
正弦 反正弦
正切 反正切
余弦 反余弦
#i=SIN[#j] #i=ASIN[#j] #i=TAN[#j] #i=ATAN[#j]/[#k] #i=COS[#j] #i=ACOS[#j]
G65和M98的差别(二)
休 息 会?
INSPECTION PLUS
软件中的全局变量
全局变量(一)
#100 #101 #102 #103 #104 #105 #106 #107 #108 #109
#110 #111 #112 #113 #114 #115 #116 #117 #118 #119
G65和M98的差别(一)
变量表
举例: G65 P1000 A1. B2. X10. Z5. 表示在调用O1000的同时,就指定了程序中#1,#2,#24,#26的值 通常在程序中有类似的语句: IF[#1 NE #0] GOTO2 或 #600=#2+10.等类似的语句 那么,这样有什么好处?
都可以调
用,有区
别吗?
G65和M98的差别(一)
指定变量的值 格式:M98 P****
G65 P**** Aa Bb Cc Dd Ee Ff Hh Ii Jj Kk Mm Nn Qq Rr Ss Tt Uu Vv Ww Xx Yy Zz
所以》 M98不能在调用时指定变量的值,而G65可以
那么G65后面跟的一大堆字母表示的是什么意思呢?
#102
#112
#103
#113
#104
#114
#105
#115
#106
#116
#107
#117
#108
#118
#109
#119
#120 #121 #122 #123 #124 #125 #126 #127 #128 #129
#130 #131 #132 #133 #134 #135 #136 #137 #138 #139
#7941-#7943
我们能用这些 变量干什么? (见测试)
常用系统变量-刀具补偿偏置
我们能用这些 变量干什么? (见测试)
常用系统变量-报警变量
变量号
功能
#3000 赋值0-200,机床停止并报警
举例
#3000=1(NG) 屏幕显示“3001 NG”
我们能用这个 变量干什么? (见测试)
算数和逻辑运算 部分一
宏程序调用
重要内容
程序调用方式
M98调用 格式:M98 P**** 举例:M98 P1000
G65调用
格式:G65 P**** Aa Bb Cc Dd Ee Ff Hh Ii Jj Kk Mm Nn
Qq Rr Ss Tt Uu Vv Ww Xx Yy Zz
举例:G65 P1000 A1. B2. X10. Z5.
休 息 会?
算数和逻辑运算 部分二
运算符
作用 多用于逻辑判断,和IF等条件语句使用
IF 条件语句
判断后跳转 示例: 如果变量#1的值大于10,跳转到N2程序段 N1 IF[#1 GT 10.] GOTO2 …… N2 G00 G91 X10. ……
IF<条件> THEN <表达式> 如果表达式满足,执行THEN后的语句。否则顺序执行 示例: 如果#1和#2的值相同,0赋值给#3 IF[#1 EQ #2]THEN #3=0; ……
G65和M98的差别(二)
示例:
O0001
#1=1. M98 P1000;
#600=-1
#600=#1;此时#600的值是多少?
……
----------------------------
-
O0002 #1=1.
#600=1
G65 P1000
#600=#1;此时#600的值是多少?
……
O1000 #1=-1. …… M99
备注
#k不为0 角度以度指定 90.5表示90度30分
算数和逻辑运算(二)
功能
平方根 绝对值
格式
#i=SQRT[#j] #i=ABS[#j]
舍入 上取整 下取整 自然对数 数对数
#i=ROUND[#j] #i=FIX[#j] #i=FUP[#j] #i=LN[#j] #i=EXP[#j]
或
#i=#j OR #k
#120 #121 #122 #123 #124 #125 #126 #127 #128 #129
用户#1可30 用变量 #140
#131
#141
#132
#142
#133
#143
#134
#144
#135
#145
#136
#146
#137
#147
#138
#148
#139
#149
全局变量(二)
#10I0NSPECTIO#1N10PLUS #101 内部计#1算11
异或
#i=#j XOR #k
与
#i= #j AND #k
蓝色字体为不常用运算符 所有运算格式要正确
备注
运算按照二进制一位一 位的进行
测试一
可以把G55的坐标值写入全局变量吗?局部变量呢? • 怎么写? • 两个有什么差异? 我可以给G55的坐标赋值吗? • 怎么写? • 有什么用处? 要读取5号刀的刀具长度补偿(含磨损) • 怎么读? • 有什么用处? 程序中要添加报警,用哪个变量,怎么用?