X2BOT-ROS轮式开源机器人
机器人操作系统的开源框架介绍

机器人操作系统的开源框架介绍机器人操作系统(Robot Operating System,ROS)是一个开源的框架,用于构建机器人软件系统。
它提供了一组工具和库,用于帮助开发者快速构建、测试和部署机器人应用程序。
本文将详细介绍几个常用的ROS开源框架,包括ROS核心、ROS通信库、ROS感知库和ROS控制库,并探讨它们在机器人操作系统中的作用和优势。
一、ROS核心ROS核心提供了一系列用于构建和管理机器人软件的基础功能。
其中包括ROS Master,作为ROS节点之间的中央协调者,负责管理节点之间的通信。
此外,ROS还提供了包管理工具ROS Package,用于管理、组织和共享代码。
ROS的核心架构基于节点(Node)的概念,每个节点代表一个独立的进程,可以通过ROS Master进行通信。
开发者可以使用不同语言(如C++、Python等)编写节点,并将它们组合成复杂的机器人系统。
二、ROS通信库ROS通信库提供了节点之间进行消息传递的机制。
它定义了一套通用的消息格式和服务类型,让不同节点之间能够进行高效地数据交换和调用。
常用的ROS通信库包括roscpp和rospy。
roscpp是ROS的C++通信库,提供了一系列的API,用于创建和管理ROS节点、发布和订阅消息、调用服务等。
而rospy则是ROS的Python通信库,它同样提供了类似的功能,使开发者可以选择更为灵活的编程方式。
三、ROS感知库ROS感知库提供了一系列的工具和算法,用于机器人的感知能力,包括图像处理、激光扫描和目标识别等。
开发者可以利用这些库来构建各种感知应用,如视觉导航、目标跟踪等。
其中,常用的ROS感知库包括OpenCV和PCL。
OpenCV是一个广泛应用于计算机视觉领域的库,提供了各种图像处理和计算机视觉算法。
PCL(点云库)是一个用于处理三维点云数据的库,可用于机器人的环境感知和建图。
四、ROS控制库ROS控制库提供了机器人运动控制方面的工具和算法,包括运动规划、轨迹控制和运动学模型等。
全球30家人形机器人公司产品和进度梳理 - 无水印版

Report:全球30家人形机器人公司:产品和进度梳理人形机器人行业洞察研究(BTIResearch)2024年3月全球主要人形机器人公司产品进度总览区域企业产品名称产品进展视频发布发布会公开场合行走公开展示灵巧手工作演示语音整合自主工作试点应用部署国内优必选Walker X ⦿⦿⦿⦿达闼机器人XR-4⦿⦿傅利叶智能Fourier GR1⦿⦿⦿智元机器人RAISE-A1⦿⦿⦿⦿宇树科技Unitree H1⦿⦿⦿无灵巧手小米Cyberone ⦿研发⦿无灵巧手科大讯飞⦿小鹏汽车PX5⦿⦿⦿无灵巧手逐际动力CL-1⦿⦿⦿无灵巧手MagicLab MagicBot ⦿开普勒Forerunner ⦿⦿⦿均胜集团JARVIS ⦿⦿⦿⦿追觅科技Eame One ⦿国外TeslaOptimus ⦿⦿⦿⦿⦿⦿Boston Dynamics Atlas⦿研发⦿无灵巧手1X Technologies EVE/NEO ⦿⦿无腿(EVE)无灵巧手(EVE )⦿⦿Agility Robotics Digit ⦿⦿⦿无灵巧手⦿⦿⦿⦿Figure.ai 01⦿⦿⦿⦿⦿⦿⦿⦿Sanctuary AI Phoenix ⦿⦿⦿⦿⦿ApptronikApollo ⦿⦿⦿⦿Engineered ArtsAmeca ⦿⦿OSAKA UNIVERSITY & MIXIALTER 3⦿无腿⦿KARLSRUHE INSTITUTE OF TECHNOLOGY ARMAR-6⦿无腿⦿Beyond Imagination Beomni ⦿无腿⦿Macco Robotics KIME ⦿无腿无灵巧手⦿⦿⦿SoftBank RoboticsNAO ⦿⦿⦿⦿⦿⦿⦿⦿PEPPER⦿⦿无腿⦿⦿⦿⦿⦿PROMOBOTPROMOBOT ⦿无腿⦿⦿⦿⦿⦿UNIVERSITY OF TEHRAN SURENA IV ⦿⦿⦿⦿TOYOTA T-HR 3⦿⦿⦿IHMCNadia⦿研发⦿无灵巧手主要发展历程◆21 年8 月,马斯克于首届AI DAY展示人形机器人概念机Tesla Bot◆22 年2 月,特斯拉成功推出人形机器人原型机,并作为开发平台进行深度研发◆22 年9 月,特斯拉发布新版本Optimus 人形机器人,可以实现直立行走、搬运、洒水等复杂动作◆23 年5 月,特斯拉在年度股东大会上展示了Optimus 最新样机Gen 1◆23 年12 月,特斯拉发布Optimus Gen 2◆24年2月发布最新Optimus Gen 2最新行走视频最新迭代产品:Optimus Gen 2◆Optimus Gen 比上一代轻了10 公斤,在各方面都有所改进,行走速度快了30%,移动方式也更加自然、平衡和精确。
基于ROS的轮式机器人定位与导航方法研究
基于ROS的轮式机器人定位与导航方法研究摘要:本文介绍了ROS轮式机器人系统在未知环境下的自主移动所依赖的传感器。
对可视化地图、栅格地图、拓扑地图、特征地图的特性进行了分析,选择了构建简单便于及时更新的栅格地图模型。
通过对导航所需要的5个步骤实现了轮式机器人在仿真环境下定位与导航的功能。
关键词:ROS;轮式机器人;定位;导航Robot Operating System简称ROS,是一种依赖于Linux内核的开源元操作系统。
ROS含有丰富的组件化工具包以及大量的工具、协议,来简化我们对机器人的控制,从而大大的提高了研发效率。
本文基于ROS研究轮式机器人的定位与导航方法。
首先,进行传感器选型和地图选择,配置机器人运行环境。
然后,通过SLAM建图拼接形成完整的地图环境。
最后,通过控制机器人的移动速度和方向实现轮式机器人的定位与导航功能。
1 传感器选型轮式机器人系统中实现自主移动,必须要考虑未知的环境特征。
在设计机器人系统时,能够提取环境信息的传感器必不可少。
这里对能够实现导航与定位目标的常用传感器进行描述[1]。
激光雷达:根据发射维数的不同来实现对不同待测目标的距离测量。
如一维激光雷达用于测量单向距离,三维激光雷达用于测量空间上物体距离。
线束数量的多少也作为激光雷达被选用时的参考依据,普通机器人通常使用线束较少的雷达。
激光雷达的优点在于其响应快、数据量小,缺点是成本较高。
里程计:常见的是编码器,用来控制机器人所处的位置或被电机所驱动的关节。
机器人移动时,车轮的旋转会触发编码器测量轮毂转数。
当测出车轮半径时,就可以计算出机器人某段时间内的移动距离和瞬时速度。
相机:在机器人SLAM技术中用到的相机根据摄像头个数有单目相机、双目相机之分;普通单目相机无法完成静态下测量距离的目标,双目相机虽然弥补了这一缺点,但是双目相机进行自身标定时颇为复杂,数据处理也比较困难。
而深度相机不仅可以提供彩色图像,还能获取单一像素的深度信息,目前室内机器人主要采用深度相机方案进行信息获取。
机器人操作系统ROS的使用方法及特点

机器人操作系统ROS的使用方法及特点机器人操作系统(Robot Operating System,简称ROS)是一个开源的、灵活的机器人软件平台,被广泛应用于机器人研究和开发领域。
ROS不仅提供了一系列工具和库,还为研究者和开发者提供了丰富的资源和社区支持。
本文将介绍ROS的使用方法和其独特的特点。
一、ROS的使用方法1. 安装ROS:首先,要使用ROS,需要在计算机上安装ROS软件包。
ROS目前支持多个操作系统,包括Ubuntu、Fedora和Mac OS。
安装ROS后,可以通过命令行或图形界面来管理和使用ROS。
2. 创建和管理工作空间:ROS使用工作空间(workspace)来组织和管理项目。
创建一个新的工作空间后,可以在其中添加和管理各个功能包(package),每个功能包都包含了特定的代码和文件。
通过合理地组织工作空间和功能包,可以更方便地进行开发和调试。
3. 使用ROS命令行工具:ROS提供了一系列命令行工具,用于快速实现各种功能。
例如,可以使用roscd命令定位到某个功能包的目录下,使用roscore命令启动ROS的核心功能,使用rosrun命令运行节点(node)等。
熟悉并灵活运用这些命令行工具,可以大大提高工作效率。
4. 编写ROS程序:ROS支持多种编程语言,包括C++、Python和Lisp等。
可以根据自己的需求选择合适的编程语言,并通过ROS提供的API进行开发。
编写ROS程序时,可以利用ROS的通信机制实现不同节点之间的数据交流和协作,从而构建复杂的机器人应用。
5. 使用ROS的传感器和执行器接口:ROS提供了丰富的传感器和执行器接口,方便开发者与机器人的硬件进行通信。
例如,可以使用ROS提供的ROS driver来访问和控制摄像头、激光雷达等传感器;使用ROS的控制器接口来操作机械臂、轮式驱动等执行器。
这些接口可以大大简化硬件驱动的开发工作。
6. 利用ROS社区资源:ROS拥有庞大的用户社区,研究者和开发者可以在社区中获取各种资源和支持。
轮式机器人跟踪控制

02
轮式机器人跟踪控制系统
跟踪控制系统概述
跟踪控制系统的定义
跟踪控制系统的组成
跟踪控制系统是一种能够使轮式机器 人跟随参考轨迹运动的控制系统。它 通过调节轮式机器人的运动,使其在 位置、速度和加速度等参数上跟踪参 考轨迹,达到精确控制的目的。
跟踪控制系统通常由控制器、传感器 和执行器组成。控制器负责根据传感 器检测到的机器人和参考轨迹的误差 ,计算出控制指令。执行器根据控制 指令调节机器人的运动。传感器则实 时监测机器人的运动状态,为控制器 提供反馈信息。
06
参考文献
参考文献
研究背景
01
介绍轮式机器人跟踪控制的研究背景和意义。
研究现状
02
综述轮式机器人跟踪控制的国内外研究现状、发展趋势和存在
的问题。
研究内容
03
详细阐述轮式机器人跟踪控制的研究内容,包括系统结构、运
动学模型、控制算法等。
感谢您的观看
THANKS
05
总结与展望
研究成果总结
精确性
轮式机器人跟踪控制的研究成果在精确性方面有显著提高,采用了 先进的控制算法和传感器技术,使机器人能够更准确地跟踪目标。
适应性
现有的研究工作还提高了轮式机器人跟踪控制的适应性,使其能够 适应不同的环境条件和任务需求。
实时性
研究成果在实时性方面也有所改进,采用了高效的计算和控制方法, 使机器人能够更快地响应指令和跟踪目标。
轮式机器人跟踪控制
2023-11-09
contents
目录
• 轮式机器人概述 • 轮式机器人跟踪控制系统 • 轮式机器人跟踪控制算法 • 轮式机器人实验平台与实验结果 • 总结与展望 • 参考文献
《基于ROS的智能工业机器人系统的设计与实现》
《基于ROS的智能工业机器人系统的设计与实现》一、引言随着科技的进步和工业自动化的快速发展,智能工业机器人系统在制造业中扮演着越来越重要的角色。
而机器人操作系统(ROS)作为一种开源的、灵活的机器人开发平台,为智能工业机器人系统的设计与实现提供了强大的支持。
本文将详细介绍基于ROS的智能工业机器人系统的设计与实现过程。
二、系统设计1. 需求分析在系统设计阶段,首先进行需求分析。
明确智能工业机器人系统的任务目标,包括物品搬运、加工、检测等。
同时,还需考虑系统的实时性、稳定性、灵活性以及扩展性等要求。
2. 系统架构设计基于需求分析,设计智能工业机器人系统的整体架构。
系统采用分层设计,包括感知层、决策层、执行层。
感知层负责获取环境信息,决策层进行数据处理和决策规划,执行层负责机器人的动作执行。
此外,系统还采用ROS作为开发平台,利用其强大的社区支持和丰富的开发资源。
3. 硬件设计根据系统需求和架构设计,选择合适的硬件设备,包括机器人本体、传感器、执行器等。
同时,考虑硬件的兼容性、稳定性以及成本等因素。
4. 软件设计在软件设计方面,利用ROS平台进行开发。
首先,设计机器人系统的通信机制,确保各部分之间的信息传递畅通。
其次,设计机器人系统的算法和模型,包括感知算法、决策算法、执行算法等。
最后,进行系统集成和调试,确保系统的稳定性和可靠性。
三、系统实现1. 感知层实现感知层主要通过传感器获取环境信息,包括视觉传感器、激光雷达等。
利用ROS提供的传感器驱动程序,实现对传感器的控制和数据的获取。
同时,利用图像处理、物体识别等技术,对获取的数据进行处理和分析。
2. 决策层实现决策层主要负责数据处理和决策规划。
利用ROS提供的各种算法库和工具,实现对数据的处理和分析。
同时,结合机器学习、深度学习等技术,实现决策规划功能。
在决策过程中,还需考虑机器人的运动学模型、动力学模型等因素。
3. 执行层实现执行层主要负责机器人的动作执行。
轮式移动机器人动力学建模与运动控制技术

WMR具有结构简单、控制方便、运动灵活、维护容易等优点,但也存在一些局限性,如对环境的适应性、运动稳定性、导航精度等方面的问题。
轮式移动机器人的定义与特点特点定义军事应用用于生产线上的物料运输、仓库管理等,也可用于执行一些危险或者高强度任务,如核辐射环境下的作业。
工业应用医疗应用第一代WMR第二代WMR第三代WMRLagrange方程控制理论牛顿-Euler方程动力学建模的基本原理车轮模型机器人模型控制系统模型030201轮式移动机器人的动力学模型仿真环境模型验证性能评估动力学模型的仿真与分析开环控制开环控制是指没有反馈环节的控制,通过输入控制信号直接驱动机器人运动。
反馈控制理论反馈控制理论是运动控制的基本原理,通过比较期望输出与实际输出之间的误差,调整控制输入以减小误差。
闭环控制闭环控制是指具有反馈环节的控制,通过比较实际输出与期望输出的误差,调整控制输入以减小误差。
运动控制的基本原理PID控制算法模糊控制算法神经网络控制算法轮式移动机器人的运动控制算法1 2 3硬件实现软件实现优化算法运动控制的实现与优化路径规划的基本原理路径规划的基本概念路径规划的分类路径规划的基本步骤轮式移动机器人的路径规划方法基于规则的路径规划方法基于规则的路径规划方法是一种常见的路径规划方法,它根据预先设定的规则来寻找路径。
其中比较常用的有A*算法和Dijkstra算法等。
这些算法都具有较高的效率和可靠性,但是需要预先设定规则,对于复杂的环境适应性较差。
基于学习的路径规划方法基于学习的路径规划方法是一种通过学习来寻找最优路径的方法。
它通过对大量的数据进行学习,从中提取出有用的特征,并利用这些特征来寻找最优的路径。
其中比较常用的有强化学习、深度学习等。
这些算法具有较高的自适应性,但是对于大规模的环境和复杂的环境适应性较差。
基于决策树的路径规划方法基于强化学习的路径规划方法决策算法在轮式移动机器人中的应用03姿态与平衡控制01传感器融合技术02障碍物识别与避障地图构建与定位通过SLAM(同时定位与地图构建)技术构建环境地图,实现精准定位。
基于ROS的开源移动机器人系统设计
基于ROS的开源移动机器人系统设计ROS(Robot Operating System)是一个开源的机器人操作系统,广泛应用于各种移动机器人平台。
在设计基于ROS的开源移动机器人系统时,需要考虑机器人的硬件平台、软件架构、传感器集成、控制与导航等方面。
一、硬件平台设计硬件平台是移动机器人系统的基础,需要根据具体需求选择适合的硬件组件。
常见的硬件组件包括电机、传感器(如激光雷达、摄像头、惯性测量单元等)、嵌入式控制板等。
硬件平台的设计需要考虑机器人的尺寸、载重、功耗等特性,同时要与ROS兼容。
二、软件架构设计在基于ROS的移动机器人系统中,软件架构设计起着关键作用。
可以采用分层架构,类似于ROS自身的设计。
常见的软件架构包括感知层、规划层、执行层等。
感知层负责获取机器人周围环境的信息,规划层负责生成机器人的路径规划,执行层负责执行路径规划控制机器人运动。
此外,还可以设计上层的用户界面和运维管理模块。
三、传感器集成设计移动机器人系统通常需要使用多种传感器,如激光雷达、摄像头、惯性测量单元等。
传感器集成设计需要考虑硬件的连接和通信协议,以及软件的驱动和数据处理。
在ROS中,可以使用ROS官方提供的传感器驱动包,也可以自行开发传感器驱动。
四、控制与导航设计控制与导航是移动机器人系统的核心功能。
在ROS中,可以使用导航栈(Navigation Stack)实现机器人的路径规划和导航。
路径规划可以使用ROS导航栈中提供的全局路径规划器(Global Planner)和局部路径规划器(Local Planner)来完成。
导航栈还提供了定位功能,可以使用SLAM(Simultaneous Localization and Mapping)算法实现机器人的自主定位。
五、模块和功能的扩展基于ROS的开源移动机器人系统非常灵活,可以根据具体需求扩展功能和添加模块。
可以使用ROS的Package和Node机制,将整个系统划分为多个独立的功能模块,每个模块运行在一个独立的Node中,通过ROS的消息机制进行通信。
机器人编程实践-ros2基础与应用

机器人编程实践-ros2基础与应用ROS2 是机器人操作系统(Robot Operating System) 的第二代版本,它提供了一套完整的软件框架,用于构建机器人应用程序。
ROS2 基于DDS(Data Distribution Service) 通信协议,具有更好的性能和可靠性,同时支持多种操作系统和编程语言,使得机器人开发更加灵活和便捷。
一、ROS2 基础1.ROS2 架构ROS2 架构由两部分组成:ROS2 核心和ROS2 工具。
ROS2 核心包括ROS2 运行时、ROS2 通信、ROS2 消息和ROS2 服务等组件,ROS2 工具包括ROS2 命令行工具、ROS2 图形化工具和ROS2 开发工具等。
2.ROS2 安装ROS2 支持多种操作系统,包括Ubuntu 、Debian 、Fedora 、CentOS 等。
安装ROS2 需要先添加ROS2 软件源,然后安装ROS2 包。
安装完成后,需要设置ROS2 环境变量,以便在终端中使用ROS2 命令。
3.ROS2 通信ROS2 通信基于DDS 协议,支持点对点通信和发布/订阅通信。
发布/订阅通信是ROS2 最常用的通信方式,它通过话题(Topic) 实现数据的发布和订阅。
发布者(Publisher) 将数据发布到话题中,订阅者(Subscriber) 从话题中订阅数据。
4.ROS2 消息ROS2 消息是数据的载体,它定义了数据的类型和格式。
ROS2 支持多种消息类型,包括基本类型、数组类型和自定义类型等。
用户可以根据需要定义自己的消息类型。
二、ROS2 应用1.ROS2 机器人控制ROS2 可以用于机器人控制,包括运动控制、传感器数据采集和处理等。
用户可以使用ROS2 提供的控制器和驱动程序,也可以自己编写控制器和驱动程序。
2.ROS2 机器人感知ROS2 可以用于机器人感知,包括视觉、声音、激光雷达等。
用户可以使用ROS2提供的感知库和算法,也可以自己编写感知程序。
ROS机器人开发实用案例分析
ROS机器人开发实用案例分析
随着现代科技的发展,机器人在世界各地开始发挥重要作用。
其中,
基于开源Robot Operating System(ROS)的机器人开发已经成为机器人
开发中重要的一环。
ROS机器人开发提供了一个功能强大的开发环境,可
以用来设计,实现和测试机器人行为。
ROS机器人开发流程分为三个主要步骤:设计,实现和测试机器人行为。
首先,在设计阶段,必须明确需求,明确应用目标和机器人硬件规格。
接下来,在实现阶段,开发者需要构建机器人硬件,然后利用ROS开发工
具进行软件开发。
最后,在测试阶段,在模拟环境中开发者需要测试机器
人的性能,确保其能够满足需求。
下面将介绍一个典型的基于ROS的机器人开发案例-导航机器人的开发。
第一步,针对导航机器人的开发,必须明确应用目标。
一般来说,导
航机器人的应用目标包括:自动行走,识别特定的物体,在模拟环境中自
主完成特定任务等。
第二步,要实现上述目标,必须构建机器人硬件,具体硬件组件包括:机器人车体,传感器,计算机,电机等。
第三步,安装ROS开发工具,并通过ROS框架提供的消息,服务,发
布和订阅功能实现应用软件设计。
第四步,测试机器人性能,确保机器人完成预期任务。
《2024年基于ROS的机器人移动平台的设计与实现》范文

《基于ROS的机器人移动平台的设计与实现》篇一一、引言随着科技的快速发展,机器人技术已经成为现代工业、服务、军事等多个领域的重要应用。
机器人移动平台作为机器人技术的重要组成部分,其设计与实现显得尤为重要。
本文将介绍基于ROS(Robot Operating System)的机器人移动平台的设计与实现过程,从系统架构、硬件组成、软件设计等方面进行详细阐述。
二、系统架构设计1. 整体架构基于ROS的机器人移动平台整体架构包括硬件层、驱动层、ROS中间层和应用层。
硬件层主要包括电机、轮子、传感器等设备;驱动层负责控制硬件设备的运行;ROS中间层则负责实现机器人运动控制、传感器数据采集等功能;应用层则负责实现机器人的具体任务。
2. 通信架构机器人移动平台的通信架构采用分布式架构,通过ROS的节点(Node)进行通信。
各个节点之间通过发布/订阅(Publish/Subscribe)的方式进行信息交互,实现机器人运动控制、环境感知、任务执行等功能。
三、硬件组成机器人移动平台的硬件组成主要包括电机、轮子、传感器等设备。
其中,电机和轮子负责机器人的运动,传感器则负责机器人的环境感知和状态监测。
具体硬件设备包括:1. 电机与轮子:采用直流电机和轮子组成移动平台,通过驱动器控制电机的运行,实现机器人的运动。
2. 传感器:包括激光雷达、超声波传感器、红外传感器等,用于实现机器人的环境感知和状态监测。
四、软件设计1. ROS系统集成机器人移动平台的软件设计基于ROS系统进行集成。
首先需要在ROS环境中创建工作空间(Workspace),并安装相关软件包和依赖库。
然后,根据机器人的任务需求,编写节点程序,实现机器人的运动控制、环境感知、任务执行等功能。
2. 运动控制设计运动控制是机器人移动平台的核心功能之一。
通过编写ROS 节点程序,实现机器人的运动规划、路径跟踪、速度控制等功能。
具体包括:(1)运动规划:根据机器人的任务需求,生成合理的运动轨迹。
《ROS机器人开发 实用案例分析 原书第2版 》读书笔记思维导图

03
2.4.3 熟 悉Gazebo 界面
05
2.4.5 Gazebo模 型验证
2.4.8 移动机器人 模型
2.4.7 机器人模型 调整
2.4.9 其他的机器 人模拟环境
第3章 TurtleBot机器人操控
01
3.1 Tur tleBo t 2机器人 简介
02
3.2 下载 Tur tleBot 2模拟器...
4.5.5 Tur tleBot 3机器人...
4.5.6 使用 Tur tleBot 3进...
4.5.7 r q t _ r e c o n f i g u r. . .
4.5.8 进一步探索 ROS导航
第5章 构建模拟的机器人手臂
5.1 Xacro的特点
5.2 采用Xacro建 立一个关节式机器...
05
6.2.5 Baxter手 臂的抓手
6.3.1 安装Baxter SDK软件
6.3.2 安装Baxter 模拟器
6.3.3 配置Baxter shell
6.3.4 安装MoveIt!
6.4.2 “热身”练 习
6.4.1 启动Baxter 模拟器
6.4.3 弯曲Baxter 手臂
6.5.1 关节与 1
T...
3.5.1 网络类型 3.5.2 网络地址
3.5.3 远程计算机网 络设置
3.5.4 上网本网络设 置
3.5.5 SSH连接 3.5.6 网络设置小结
3.5.7 排查网络连接 中的故障
3.5.8 Tur tleBot 2机器人...
3.7.2 采用ROS命 令控制Turtl...
3.7.1 采用键盘远 程控制Turtle...
轮式移动机器人

轮式移动机器人简介轮式移动机器人是一种使用轮子作为主要运动方式的机器人。
它具有灵活的机动性和广泛的应用领域,常用于物流、服务机器人和教育等领域。
本文将介绍轮式移动机器人的基本原理、结构和应用。
基本原理轮式移动机器人采用轮子作为运动部件,通过驱动电机控制轮子的转动实现机器人的运动。
根据轮子的布置方式,轮式移动机器人通常分为三种类型:差速机器人、全向机器人和麦克纳姆机器人。
•差速机器人:差速机器人使用两对轮子,每对轮子都由一个独立的驱动电机控制。
当两侧的轮子以不同的速度转动时,机器人将会旋转或向一侧移动。
•全向机器人:全向机器人通过设计特殊的轮子布局实现多个方向的运动。
常见的布局方式有四个轮子呈菱形排列和三个轮子围成一个三角形的布局。
•麦克纳姆机器人:麦克纳姆机器人使用四个特殊的麦克纳姆轮,这种轮子具有斜向排列的滚筒,可以在多个方向上运动。
结构轮式移动机器人的结构包括底盘、轮子、驱动电机和控制系统等组成部分。
•底盘:底盘是机器人的承载结构,用于搭载其他组件,并承受机器人的运动载荷。
底盘通常由坚固耐用的材料制成,如铝合金或碳纤维。
•轮子:轮子是轮式移动机器人的关键组件,负责机器人的移动。
根据具体的应用需求,轮子的类型和尺寸可以有所不同。
•驱动电机:驱动电机是控制机器人轮子转动的关键部件。
常见的驱动电机包括直流无刷电机和步进电机,采用不同的控制方法可以实现多种运动方式。
•控制系统:控制系统是轮式移动机器人的大脑,负责接收外部指令并控制机器人的运动。
控制系统通常由嵌入式处理器和传感器组成,可以实现自主导航、避障和路径规划等功能。
应用轮式移动机器人具有广泛的应用领域,以下是一些常见的应用示例:1.物流机器人:轮式移动机器人可以用于仓库、工厂等场景中的物流任务,例如搬运货物、库存管理和自动拣选等。
2.服务机器人:轮式移动机器人可以在酒店、医院、商场等场所提供服务,例如接待客人、导航指引和送餐等。
3.家庭助理:轮式移动机器人可以在家庭环境中提供各种辅助服务,例如打扫卫生、智能家居控制和娱乐互动等。
基于ROS架构的叉车型AGV控制系统设计开发研究
2 控制系统的总体架构及硬件选型
2.1 控制系统的总体架构 本文所提出的控制系统采用双层控制器结构
的设计。上层控制器采用威嵌沃 VBOX鄄200 工控机, 其上装有 Linux 操作系统 Ubuntu20.04 和ROS鄄Noetic 开源机器人操作系统,负责接收并处理激光雷达和 IMU 信 息 ,估 计 AGV 位 姿 ,实 现 定 位 及 建 图 功 能 , 轨迹跟踪控制,并将控制指令发送到下层控制器进
有 日 益 广 泛 的 应 用[2]。 AGV 控制系统作为机器人的功能核心,通常由
定位导航、路径规划、运动控制、人机交互、通信等 模块组成[3]。 AGV 控制系统需要通过自身传感器信 息进行系统状态估计;同时,根据作业调度信息对
收 稿 日 期 :2024-01-04;修 订 日 期 :2024-04-22 作者简介:刘光印(1997—),男,硕士,研究方向为 机 器 人 SLAM 及 智 能 控 制 ;钱 东 海 (1971—),男 ,博 士 ,副 教 授 ,研 究 方 向
电池 监控
驱动电机 驱动器
中图分类号:TP242 文献标识码:A
文 章 编 号 :1001鄄9944(2024)05鄄0034鄄06
Design and Development of Forklift AGV Control System Based on ROS Archi鄄 tecture
LIU Guangyin,QIAN Donghai,XIAO Ziming,WANG Zhiguo
行输出控制。 下层控制器采用西门子 S7鄄1200 系列 PLC 作为车载控制器,主要负责外围传感器设备的 信息采集,并通过 CAN 通信方式向舵轮行走电机和 转向电机发送行走速度和转角的控制指令,以及接 收来自两电机驱动器发送的实际的行走速度及转 角信息。 上层与下层控制器之间采用 TCP/IP 网络通 信。 控制系统总体架构如图 4 所示。
ros开源应用案例
ros开源应用案例
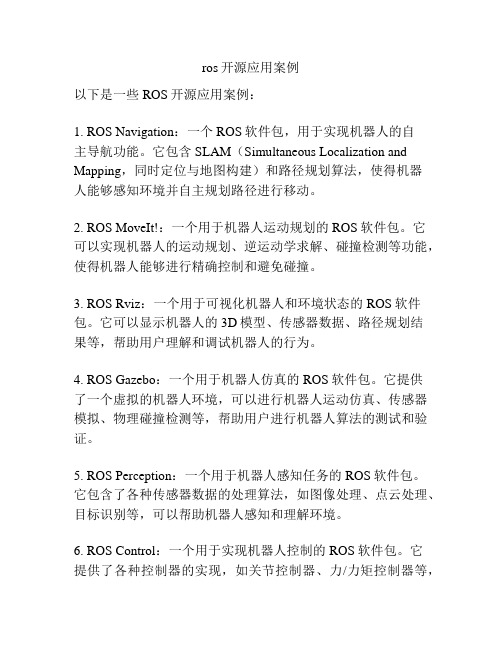
以下是一些ROS开源应用案例:
1. ROS Navigation:一个ROS软件包,用于实现机器人的自
主导航功能。
它包含SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)和路径规划算法,使得机器
人能够感知环境并自主规划路径进行移动。
2. ROS MoveIt!:一个用于机器人运动规划的ROS软件包。
它
可以实现机器人的运动规划、逆运动学求解、碰撞检测等功能,使得机器人能够进行精确控制和避免碰撞。
3. ROS Rviz:一个用于可视化机器人和环境状态的ROS软件包。
它可以显示机器人的3D模型、传感器数据、路径规划结
果等,帮助用户理解和调试机器人的行为。
4. ROS Gazebo:一个用于机器人仿真的ROS软件包。
它提供
了一个虚拟的机器人环境,可以进行机器人运动仿真、传感器模拟、物理碰撞检测等,帮助用户进行机器人算法的测试和验证。
5. ROS Perception:一个用于机器人感知任务的ROS软件包。
它包含了各种传感器数据的处理算法,如图像处理、点云处理、目标识别等,可以帮助机器人感知和理解环境。
6. ROS Control:一个用于实现机器人控制的ROS软件包。
它
提供了各种控制器的实现,如关节控制器、力/力矩控制器等,
使得用户可以对机器人进行高级控制。
这些是一些在ROS生态系统中常见的开源应用案例,它们可以帮助开发者快速构建机器人系统、实现机器人的自主功能、进行仿真和感知等任务。
轮式移动机器人定位和导航系统设计
Design of Wheeled Mobile Robot Positioning and
Navigation System
作者: 董明泽[1];韩雨薇[1];许凯成[2];段睿劼[1];朱天宇[1]
作者机构: [1]中国计量大学量新学院;[2]中国计量大学机电工程学院,浙江杭州310018出版物刊名: 科技资讯
页码: 31-33页
年卷期: 2020年 第31期
主题词: ROS;SLAM;激光雷达;同步定位与地图构建;自主导航
摘要:该文设计了一套基于开源机器人操作系统(ROS)和激光雷达的移动机器人控制系统方案,以满足当前室内机器人在定位与地图构建上的需求。
该系统以开源卡片式电脑树莓派3B+为核心控制器,使用STM32作为驱动控制板,在Linux系统下使用ROS分布式框架下进行软件算法的开发。
根据机器人的状态和用户命令可实现人机交互、SLAM地图扫描绘制、WiFi远程控制、即时定位和室内导航的功能。
实际调试结果表明,系统能够构建出与实际环境差别较小的特征图,并对平台实时位置进行精确的定位,能有效完成定位和导航的任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内置完整的 SLAM 实例程序。
配置参数
尺寸
长 宽 高:464*512*434mm
底盘高度:55.0 mm
轮胎直径:195 mm
顶板厚度:4 mm
重量(kg)
本体重量:25 kg
额定负载:30 kg
X2BOT-ROS 轮式开源机器人
机器人及配件报价
X BOT 2 -动机器人开源开发平台:两轮差速驱动、高续航能力、丰富的扩展 接口、稳固的机械架构、适用于室内环境。
相比较同类机器人平台,X2BO-ROS 内置高精度惯导定位模块为 机器人提供局部区域的完全自主定位信息。
两轮差速驱动
最大线速度:0.85 m/s
最大角速度:470 °/s 最大爬坡角度:20 ° 最大摆动半径:308mm
电源系统
磷酸铁锂电池:24 V / 20 Ah
(内置过充过放过流保护板)
最大电流:30 A
充电时间:4 小时 续航时间:12 小时(本体) 外引电源(用户配件使用)
12V/2A
外置
5V/3A 24V~28V(电池直连) HOKUYO 激光测距仪 x1
无限鼠标/键盘
x1
内置 电机控制板(RS485) x2
声测距模块(RS485) x4
范围:1~100 cm
精度:0.5cm
视角:15 °
惯导定位模块(RS232) x1
输出频率:50 Hz
输出数据
(x,y,θ) 定位 20 米内重复精度
前后 < 0.05 m
左右 < 0.1 m
角度漂移
静止:0 °/s
软件系统完全基于 ROS 系统,涵盖了机器人开发中常用的硬件 驱动、数据结构、通信编程、图形界面、机器人算法、视觉算法等 资源。方便用户快速上手开发自己的机器人应用或进行机器人算法 研究试验。
系统组成
Ubuntu14.04LTS-64bit ROS indigo OpenCV2.4.8 MRPT 1.0