交通场景中运动目标的检测文献综述
运动目标检测专利技术综述
运动目标检测专利技术综述随着计算机视觉技术在智能交通、人机交互、医学图像重建和分析等研究领域的飞速发展,运动目标的检测变得越来越受重视,其在各个研究领域中发挥着重要的作用。
例如在军事作战领域,能否实现对目标的实时检测和精准定位是远程预警的关键问题;在基于无人机系统的监控领域,必须解决对无人机传感设备获取的视频序列中的运动目标进行检测的问题。
另外在远程视频、三维重建、视频压缩等重要领域上,运动目标检测同样有着不可或缺的地位,比如在远程视频中,要对当前图像中的人脸进行锁定,需要对其进行目标识别和追踪;在视频压缩中,首先要对图像进行目标分割,在复杂变化的场景下的压缩就要基于对目标的检测和提取来实现。
近年来,背景差分技术、帧间差分法、图论法、基于最大期望值法等检测技术迅速发展并广泛应用到目标检测中,但是由于这些技术只适用于背景不发生变化或仅仅存在微小变化的情况下,在背景发生动态改变的情况下,采用上述技术进行目标检测,无法获得满意的目标检测和提取效果,这就给后续的目标跟踪或者是重建等其他处理带来了较大的影响。
因此,如何在背景发生动态改变的情况下,准确地检测和提取出运动目标是运动目标检测领域的重要课题,受到了大量的关注。
其中动态背景下的运动目标检测要比静态背景下的运动目标检测的应用范围更加广泛,更贴合现实生活中的实际情况,在大部分需要进行运动目标检测的应用中,其获取的视频图像序列的背景都存在一定程度的变化,有些甚至背景发生较大的改变,实现在该类背景下准确检测和提取出运动目标,可以为后续对运动目标的处理打好基础,使得对目标的操作不受到背景部分的影响,提高对目标处理的准确度。
二、技术发展60 年代至今,随着国外图像目标检测理论与相关技术的持续发展,基于视觉的目标检测技术不论是从应用还是从理论研究上,都得到了飞速的发展。
Mart、Barrow等人提出一套被普遍认可的视觉计算理论框架,其中包括视觉可计算性原理、图像预处理相关技术、区域分割与识别、主动视觉、基于模型的视觉和视觉系统控制策略等,随着计算机视觉的发展,运动目标检测作为该领域的重要研究课题,获得了大量的关注;1980年,美国国防预研局成立了自动检测和识别目标小组,为需要自动识别及跟踪的目标图像数据制定统一的标准;1997年,美国著名研究机构进行研制的视频监督控制系统VSAM,实现了对视频中运动目标的检测和监控,主要用于战场及未来城市民用场景的监控;Stauffer和Crimson于1999年提出高斯混合模型建模,实现背景建模下检测出完整的运动目标。
运动目标检测方法综述
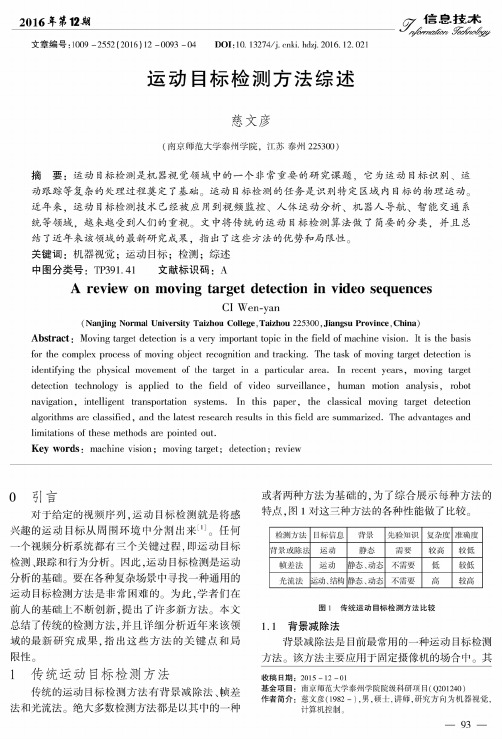
文章编号:1〇〇9 -2552(2016) 12 -0093-04D O I:10. 13274/j. cnki. hdzj. 2016. 12. 021运动目标检测方法综述慈文彦(南京师范大学泰州学院,江苏泰州225300)摘要:运动目标检测是机器视觉领域中的一个非常重要的研究课题,它为运动目标识别、运 动跟踪等复杂的处理过程奠定了基础。
运动目标检测的任务是识别特定区域内目标的物理运动。
近年来,运动目标检测技术已经被应用到视频监控、人体运动分析、机器人导航、智能交通系统等领域,越来越受到人们的重视。
文中将传统的运动目标检测算法做了简要的分类,并且总结了近年来该领域的最新研究成果,指出了这些方法的优势和局限性。
关键词:机器视觉;运动目标;检测;综述中图分类号:TP391.41 文献标识码:AA review on moving target detection in video sequencesCI Wen-yan(Nanjing Normal University Taizhou C ollege,Taizhou 225300,Jiangsu Province,China) Abstract:Moving target detection i s a very important topic in the f i eld of machine vision.I t i s the basisfor the complex process of moving object recognition and tracking.The task of moving target detection i s identifying the physical movement of the target in a particular area.In recent years,moving target detection technology i s applied t o the fie l d of video surveillance,human motion analysis,robot navigation,intelligent transportation systems.In t h i s paper,the classical moving target detection algorithms are classified,and the l a t e s t research results in t h i s fie l d are summarized.The advantages and limitations of these methods are pointed out.Key words:machine vision;moving target;detection;review2016年第124S y信息疼产0引言对于给定的视频序列,运动目标检测就是将感 兴趣的运动目标从周围环境中分割出来[1]。
运动目标检测及运动轨迹分析的开题报告
运动目标检测及运动轨迹分析的开题报告一、研究背景运动目标检测及运动轨迹分析是机器视觉领域的一个热点研究方向。
它可以应用于各种场景下的目标跟踪、运动分析、行为识别等问题。
在物联网、智能家居、智慧城市等应用场景下,运动目标检测及运动轨迹分析可以为人们提供更智能、更高效的服务。
例如,在智能家居中,通过识别家中居民的运动轨迹,可以根据不同时间段、不同区域的人流情况来智能控制灯光、电器等设备的运行状态。
在公共安全领域,运动目标检测及运动轨迹分析也具有重要的应用价值。
例如,在安保监控中,通过运动目标检测及运动轨迹分析,可以及时发现、识别异常行为,从而避免或减少安全事件的发生。
二、研究内容本文将针对运动目标检测及运动轨迹分析问题展开深入研究,主要内容包括以下几个方面:1. 运动目标检测算法设计本文将设计基于深度学习的运动目标检测算法,包括单目标检测和多目标检测。
其中,单目标检测算法采用卷积神经网络架构,能够对单个运动目标进行精准识别。
多目标检测算法将采用YOLO、RCNN、SSD等现有框架为基础,将其与深度学习中的注意力机制、半监督学习等方法相结合,以提高多目标检测的精度和效率。
2. 运动轨迹分析算法设计本文将设计基于深度学习的运动轨迹分析算法,能够对目标的运动路径、速度、加速度等运动信息进行分析。
该算法将采用卷积神经网络架构,通过对目标运动轨迹进行序列建模,并结合先验知识,以提高运动轨迹分析的准确性和稳定性。
3. 算法实验及性能分析本文将在公共安全监控、智能家居等场景下测试算法的效果,并进行对比分析。
以公共安全监控为例,将利用已标注的数据集进行运动目标检测和运动轨迹分析,分析算法在不同场景、不同时间段的准确性和稳定性。
同时,本文也将对目标跟踪、行为识别等问题进行探究,以提高运动目标检测及运动轨迹分析在实际场景下的应用价值。
三、研究意义本文将对运动目标检测及运动轨迹分析算法进行研究,其意义主要如下:1. 在公共安全、智能家居等领域提供更智能、更高效的服务。
检测跟踪文献综述

近年来,智能视频监控技术的研究与应用备受人们关注。
作为其基本处理部分,视频监控图像的运动目标检测是一个非常活跃的研究方向,属于计算机视觉领域的重要研究内容,在智能监控、视频压缩、自动导航、人机交互、虚拟现实等方面有着广泛的应用前景.随着计算机软硬件技术的发展,计算机技术与监控技术相结合成为了一个新兴的应用研究方向。
这种监控系统与传统意义上的监控系统的本质区别在十其智能性.视频监控的目的主要是用十对入侵者的监视、交通流量的监测,以及大门出入人员的保安监控等。
传统的监控系统大都需要人工配合进行监控,存在各种问题。
采用红外传感器等半自动的检测方法又存在对猫犬等动物产生误报警等问题.因此,对智能化的监控系统的研究就非常有必要。
简言之,不仅仅用摄像机来代替人眼简单的获取现场图像信息,应用计算机技术来协助监控人员甚至代替监控人员来完成监控任务,从而既获得良好的监控效果,又大大地减轻监控中的人力投入。
由此可见,智能监控系统有着广泛的应用前景和潜在的市场价值。
然而要使监控系统达到智能化,就必须使计算机能够从监控摄像机里所获取的视频图像序列中提取出感兴趣的目标,并对其进行目标分类和跟踪,从而达到对目标行为进行理解与描述的目的。
智能视频监控是计算机视觉领域一个新兴的应用方向和备受关注的前沿课题。
视频监控技术的发展大致经历了以下二个阶段:(1)第一代视频监控系统:早期的视频监控都是以模拟设备为主的闭路电视监控系统,称其为模拟视频监控系统。
通常采用同轴电缆的传输方式进行信号传输,但是这种模拟方式的传输要保证宽带信号具有高的信噪比和较小失真是十分困难的,所以第一代监控系统的可靠性和抗干扰性都较差,功能也相对简单。
(2)第二代视频监控系统:随着数字技术的发展,图像数据压缩编码技术及标准的改进,芯片成本的不断下降,数字视频监控系统也迅速发展起来。
人们利用计算机的高速数据处理能力进行视频采集和处理,大大提高了图像质量,增强了视频监控的能力,提高了系统的可靠性,增强其可扩展性,其功能也越来越专业化、多样化。
运动目标检测与跟踪的研究与实现

硕士学位论文论文题目运动目标检测与跟踪的研究与实现作者姓名郑志洵指导教师杨建刚教授ﻩﻩ学科(专业) 计算机应用技术所在学院计算机学院提交日期2006年5月15日摘要在道路交通治理中,为了获得车辆的运动数据,早期经常采纳的是感应线圈等硬件测量的方法。
而假如采纳摄像头拍摄的道路视频,再用计算机软件处理的方法,则能够极大的增加方便性和灵活性。
本文运动目标检测与跟踪研究如何让计算机从视频图像序列中获得物体运动数据。
运动目标检测与跟踪分为背景提取、运动点团提取、运动点团位置提取、运动物体跟踪这几个步骤,本文对每一个步骤的各种算法做了实验分析比较研究,并提出了改进算法。
在背景提取步骤提出了改进的基于均值的背景提取算法以及减少图像像素的兴趣区提取算法。
在运动点团提取的阴影处理步骤提出了改进的基于RGB空间的阴影处理算法。
在运动点团位置提取步骤提出了改进的线段编码算法。
在运动物体跟踪步骤提出了基于预测的运动跟踪算法。
实验与分析讲明本文提出的算法优于原算法。
本文还通过实验分析比较了基于灰度图像序列的运动目标检测与跟踪、基于边缘图像序列的运动目标检测与跟踪,它们都没有基于彩色图像序列的运动目标检测与跟踪效果好。
最后,本文得到了一整套运动目标检测与跟踪的方法,它们的健壮性和实时性都符合实际运用的要求。
关键词:背景提取、阴影处理、运动目标检测、运动跟踪、彩色图像、灰度图像、彩色边缘检测AbstractIn a traffic control system, in order to achi eve the data of moving vehicles, hardware is installed to directly measure them in t he early days. If we usecomputer software to calculate the data from traffic video,we can gain more convenience and flexibility. This thesis is focused on the research of themethods of achieving the data of moving v ehicles from traffic video by computer.Moving object detection and tracking can be divided into these steps: background extraction,movingblobextraction, moving blob’s position achieving andmoving object tracking. This thesis showsourexperiments and analysis onmany algorithms in each of the steps. It alsoshows the improvement of the a lgorithms made byus. The experiments and analysis demonstrate that the improved algorithms are betterthen the original ones.Experimentsand analysis also demonstrate that moving object detection and tracking based on color images is better thanbased on the gray images or edgeimages.In the end we obtain a whole method of moving object detection and tracking. The r obustness and real-timeproperty of themethod can reach the acquirement of the real appli cation.Keywords:Background Extraction, Shadow Elimination, Mov ing Object Detection, Moving Object Tracking, Color Image, Gray Image, Color Edge Detector目录摘要ﻩ错误!未定义书签。
《城市街道场景的行人检测研究》范文

《城市街道场景的行人检测研究》篇一一、引言随着城市交通的日益繁忙和智能交通系统的快速发展,行人检测技术在城市街道场景中显得尤为重要。
本文旨在探讨城市街道场景下的行人检测技术,分析其研究背景、意义及现状,以期为智能交通系统的发展提供有益的参考。
二、研究背景及意义行人检测作为智能交通系统的重要组成部分,其作用在于提高行车安全性、降低交通事故率、保护行人权益等方面具有重要意义。
城市街道场景因其复杂性、动态性等特点,对行人检测技术提出了更高的要求。
因此,研究城市街道场景的行人检测技术,对于推动智能交通系统的发展、提高城市交通安全水平具有十分重要的意义。
三、国内外研究现状目前,国内外学者在行人检测领域进行了大量研究。
传统的行人检测方法主要基于图像处理和计算机视觉技术,如基于特征提取、模板匹配等方法。
然而,这些方法在复杂多变的城市街道场景中往往难以取得理想的检测效果。
近年来,随着深度学习技术的发展,基于深度学习的行人检测方法逐渐成为研究热点。
这些方法通过训练大量的数据,可以自动提取图像中的特征信息,有效提高行人检测的准确性和鲁棒性。
然而,仍存在诸多挑战和问题亟待解决,如算法计算效率、检测准确率、对不同光照和天气条件的适应性等。
四、研究内容与方法本研究以城市街道场景为研究对象,采用基于深度学习的行人检测方法。
首先,收集大量的城市街道场景图像数据,包括不同光照、天气、背景等条件下的图像。
其次,利用深度学习算法训练行人检测模型,如卷积神经网络(CNN)等。
在训练过程中,通过调整模型参数、优化网络结构等方法,提高模型的检测准确性和鲁棒性。
最后,对训练好的模型进行测试和评估,分析其在不同场景下的性能表现。
五、实验结果与分析通过实验测试,我们发现基于深度学习的行人检测方法在城市街道场景中取得了显著的成果。
模型在各种光照、天气和背景条件下均能实现较高的检测准确率和鲁棒性。
然而,仍存在一些挑战和问题需要解决。
例如,在行人密集、遮挡严重等复杂场景下,模型的检测准确率有待进一步提高。
基于DSP的运动目标检测文献综述初稿
目前,常用的运动目标检测方法主要有:光流法、帧差法、背景减法,此外还
有块匹配法和运动能量法等[4]。由于许多运动物体提取算法都是在文中前三种算法的基础上衍生而来,本文主要介绍光流法、帧差法以及背景减法。
2.1光流法
光流的概念是仿照流体动力学[5]产生的,它的原理是给摄取的图像中每一个像素点赋予一个速度矢量,这就形成一个图像运动场,在运动的一个特定时刻,图像中的点与三维物体上的点一一对应。这种对应关系可由投影关系得到,根据各个像素点的速度矢量特性,可对图像进行动态分析。若图像中没有运动目标,则光流矢量在整个图像区域是连续变化的,当运动目标出现时,运动物体所形成的速度矢量必然和领域背景速度矢量不同,由此可将相似的运动矢量合并形成运动目标从而完成运动目标的检测。
光流法检测目标无需预先知道背景信息,并且可以用于动态背景,但是这种方法计算量大、易受到噪声的影响,不适于实时检测。近年来,有学者提出将Canny边缘提取融入光流场分割技术[6],其实时性得到提高。但如何进一步提高其抗噪性及运算速度仍有待于深入研究。
2.2帧差法
帧差法是基于时间序列用差分方法来实现运动目标的检测即:如果一副图像某一位置的物体发生变化,那么对应位置的灰度也将发生改变;反之,没有物体运动的画面的灰度则没有变化或变化很小。根据这一原理,此方法只要比较序列图像中相邻两幅图像的对应像素灰度是否发生改变来检测运动目标。
[4]李乐虎.基于DSP视频运动目标的实时检测与跟踪系统研究[J].科技论坛,2008:4.
[5]A Verri, S Uras,E DeMicheli. Motion segmentation from optical flow[C]. In:Proc the 5thAlvey Vision Conference, Brighton,UK,1989:209-214.
城区交通场景中运动目标视觉跟踪方法研究
城区交通场景中运动目标视觉跟踪方法研究摘要:随着城市交通的发展和智能交通系统的建设,运动目标的视觉跟踪在城区交通中扮演着重要的角色。
基于视觉的检测和跟踪方法可以用于交通监控、交通流量统计、交通违规检测等方面。
本文对城区交通场景中的运动目标视觉跟踪方法进行了研究,主要包括特征提取、目标跟踪算法、运动目标的轨迹估计和运动目标的状态预测等方面。
一、引言城区交通是一个复杂而多变的环境,交通目标的视觉跟踪是智能交通系统和城区交通监控的重要技术之一、运动目标的视觉跟踪需要面临很多的挑战,如背景干扰、光照变化、目标遮挡等。
因此,城区交通场景中的运动目标视觉跟踪方法研究具有重要的理论和应用价值。
二、特征提取特征提取是运动目标视觉跟踪方法的第一步,它通过从图像序列中提取目标的特征,并将其用于目标的跟踪。
常用的特征包括颜色特征、纹理特征、形状特征等。
在城区交通场景中,由于背景复杂,特征提取面临着一定的挑战。
因此,需要选择适合城区交通场景的特征提取方法,以提高运动目标的视觉跟踪效果。
三、目标跟踪算法目标跟踪算法是运动目标视觉跟踪方法的核心,它通过对运动目标的轨迹进行建模和预测,来实现目标的连续跟踪。
常见的目标跟踪算法包括相关滤波器跟踪、粒子滤波器跟踪、卡尔曼滤波器跟踪等。
这些目标跟踪算法可以根据城区交通场景的要求进行选择和优化,以获得更好的跟踪效果。
四、运动目标的轨迹估计运动目标的轨迹估计是运动目标视觉跟踪方法的重要环节,它通过对目标的历史轨迹进行建模和分析,来估计目标的运动轨迹和行为。
常见的轨迹估计方法包括基于卡尔曼滤波器的轨迹估计、基于粒子滤波器的轨迹估计等。
这些轨迹估计方法可以用于城区交通场景中的交通流量统计、运动目标预测等方面。
五、运动目标的状态预测运动目标的状态预测是运动目标视觉跟踪方法的关键环节,它通过对目标的运动状态进行建模和预测,来实现目标的未来位置和行为的预测。
常见的状态预测方法包括卡尔曼滤波器状态预测、粒子滤波器状态预测等。
交通工程毕业论文文献综述
交通工程毕业论文文献综述一、引言交通工程是研究和规划交通系统的学科,其研究内容涉及交通网络、交通运输管理、道路设计、交通流理论等。
随着城市化进程和交通需求的增加,交通工程的研究和应用变得越来越重要。
本文旨在对交通工程领域相关的文献进行梳理和综述,为交通工程毕业论文的撰写提供参考和指导。
二、交通系统规划与管理1. 交通规划与设计交通规划与设计是交通工程中的重要环节,其目的是通过科学的规划和设计手段来优化交通网络的配置和交通设施的布局。
在文献综述中,可以探讨交通规划与设计的方法、模型及其在具体案例中的应用。
2. 交通系统管理与控制交通系统管理与控制是指通过信息技术和通信工具来监测和调度交通流量,以提高交通网络的运行效率和出行体验。
文献综述中可以讨论交通系统管理与控制的关键技术,如交通信号控制、智能交通系统等,并介绍其在实际应用中的效果和局限性。
三、交通流理论与模型1. 交通流理论交通流理论研究交通流量的形成、演化和稳定特性,并通过建立数学模型来描述和预测交通流的行为。
在文献综述中,可以介绍交通流理论的基本概念和发展历程,以及不同交通流模型的优缺点。
2. 交通模型与仿真交通模型和仿真是交通工程领域常用的研究方法,通过建立交通系统的数学模型和仿真平台,可以快速评估不同交通管理策略的效果和影响。
在文献综述中,可以对交通模型和仿真技术进行综述,并结合具体案例分析其应用价值。
四、交通工程技术与应用1. 道路设计与交通安全道路设计是交通工程中的重要环节,合理布局和设计道路可以提高交通的运行效率和安全性。
在文献综述中,可以介绍道路设计的原则、方法和技术,以及交通安全管理的策略和措施。
2. 公共交通与出行行为公共交通是城市交通系统中的重要组成部分,其规划和运营对于解决城市交通拥堵和环境污染问题具有重要意义。
在文献综述中,可以探讨公共交通规划的原则和方法,以及出行行为对公共交通需求的影响因素。
五、结论本文对交通工程领域的相关文献进行了综述,围绕交通系统规划与管理、交通流理论与模型、交通工程技术与应用等方面进行了论述。
《2024年城市街道场景的行人检测研究》范文
《城市街道场景的行人检测研究》篇一一、引言随着城市交通的日益繁忙和智能交通系统的快速发展,行人检测技术在城市街道场景中显得尤为重要。
本文旨在探讨城市街道场景下的行人检测技术,分析其应用现状、研究意义及未来发展趋势。
首先,本文将简要介绍行人检测技术的背景和意义,然后阐述研究目的、研究方法以及论文结构。
二、行人检测技术背景及意义行人检测技术是计算机视觉领域的一个重要研究方向,主要应用于智能交通系统、安防监控、无人驾驶等领域。
在城市街道场景中,行人检测技术能够实时监测行人动态,提高交通安全性,减少交通事故。
此外,行人检测技术还有助于提高城市管理效率,为城市规划、交通流量分析等提供有力支持。
三、相关研究现状及分析目前,国内外学者在行人检测领域进行了大量研究,取得了一系列成果。
然而,城市街道场景下的行人检测仍面临诸多挑战,如复杂背景、多尺度行人、行人姿态变化等。
针对这些问题,本文将分析现有行人检测算法的优缺点,总结研究现状及发展趋势。
四、研究方法与实验设计本文采用理论分析与实验研究相结合的方法,对城市街道场景下的行人检测技术进行研究。
首先,通过文献综述,总结前人研究成果及不足;其次,针对城市街道场景的特点,设计实验方案,包括数据集构建、算法选择与实现、实验环境搭建等;最后,对实验结果进行统计分析,评估算法性能。
五、实验结果与分析1. 实验结果本文采用多种行人检测算法在城市街道场景数据集上进行实验,通过对比分析各算法的准确率、召回率、误检率等指标,评估算法性能。
实验结果表明,某些算法在城市街道场景下具有较好的行人检测效果。
2. 结果分析针对实验结果,本文从算法原理、参数设置、模型优化等方面进行分析。
首先,总结各算法在城市街道场景下的优缺点;其次,分析影响行人检测性能的关键因素;最后,提出改进措施和优化方案。
六、讨论与展望1. 讨论本文认为,城市街道场景下的行人检测技术仍面临诸多挑战。
为提高行人检测性能,需要从算法优化、模型更新、数据集扩展等方面进行深入研究。
交通场景中多目标的检测与跟踪
交通场景中多目标的检测与跟踪作者:陈景波陆建明邬正义谈正来源:《现代电子技术》2008年第01期摘要:介绍了一种简单、快速的实时交通场景中多目标的检测与跟踪算法。
在使用自适应背景差分法分割出运动目标候选区域的基础上,采用数学形态学操作和降低分辨率的方法,得到连通的目标区域,并使用改进的最近邻法对目标进行匹配和跟踪。
实验证明本算法较好地解决了跟踪的连续性、实时性、精确度的矛盾。
关键词:目标检测;最近邻法;跟踪;匹配中图分类号:TP13 文献标识码:B文章编号:Multiple Moving Objects Detection and Tracking under Traffic Scene(1.Spinning Machine Research Center,Changshu Institute of2.Research Institute of Information Engineering,Xi′an Jiaotong University,Xi′an,710049,China)Abstract:A simplified and fast algorithm for detecting and tracking multiple moving objects under real-time traffic scene is presented.This algorithm firstly uses morphological operation and reduces the frames′ resolution to get the connected regions of moving objects which are segmented out by adaptive background subtraction algorithm.,then uses the improved nearest neighbor algorithm to match and track objects.Experimental results demonstrate that this method has better solved the contradictions between continuity,real-time and precision in tracking.Keywords:object detection;nearest neighbor;tracking;match1 引言目前,以数字图像处理技术为核心的视频监视系统[1]越来越广泛地应用到交通监管中,他利用摄像机来获取图像,由计算机完成对运动目标的自动检测,如果车辆交通违规时,自动发出预警,记录全程违章视频,这在很大程度上减轻了监控人员的劳动强度,克服可能的人为失误,而且节省大量存储空间,使存储的数据更为有效,为交通违规的后续处理提供了客观依据。
《2024年交通场景下的车辆行人多目标检测与跟踪算法研究》范文
《交通场景下的车辆行人多目标检测与跟踪算法研究》篇一一、引言随着科技的不断进步,交通监控系统逐渐从单一功能的设备发展成为复杂、多功能的智能系统。
在交通场景中,车辆行人多目标检测与跟踪算法作为智能交通系统的重要组成部分,对于提升交通安全、缓解交通拥堵和提高交通管理效率具有重要意义。
本文旨在研究交通场景下的车辆行人多目标检测与跟踪算法,为相关领域的研究和应用提供参考。
二、交通场景下的多目标检测1. 算法概述多目标检测是交通场景中车辆行人多目标跟踪的基础。
目前,常用的多目标检测算法包括基于深度学习的目标检测算法和基于传统计算机视觉的方法。
其中,基于深度学习的算法如YOLO、SSD和Faster R-CNN等在交通场景中表现出较好的性能。
2. 算法原理在交通场景中,多目标检测算法主要通过卷积神经网络对图像进行特征提取和目标识别。
具体而言,算法首先对输入的图像进行预处理,如去噪、归一化等操作;然后通过卷积神经网络提取图像中的特征;最后利用分类器和回归器对目标进行识别和定位。
三、车辆行人多目标跟踪1. 算法概述车辆行人多目标跟踪是在多目标检测的基础上,对多个目标进行轨迹预测和关联的过程。
常用的多目标跟踪算法包括基于滤波的方法、基于聚类的方法和基于深度学习的方法等。
2. 算法原理车辆行人多目标跟踪算法主要通过数据关联和轨迹预测实现目标的跟踪。
首先,算法对检测到的目标进行特征提取和描述;然后,利用数据关联算法将不同帧之间的目标进行关联;最后,通过轨迹预测算法对目标的未来位置进行预测。
四、算法优化与挑战1. 算法优化针对交通场景下的车辆行人多目标检测与跟踪算法,可以从以下几个方面进行优化:提高算法的检测精度和速度、增强算法对复杂环境的适应能力、降低算法的误检率和漏检率等。
具体而言,可以通过改进网络结构、优化参数设置、引入先验知识等方法提高算法性能。
2. 挑战与问题尽管车辆行人多目标检测与跟踪算法在交通场景中取得了显著的进展,但仍面临诸多挑战和问题。
交通事件检测技术综述
交通事件检测技术综述-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII交通事件检测技术综述李红梅1,2(1、昆明理工大学信息工程与自动化学院云南省昆明市 650500;(2、云南省矿物管道输送工程技术研究中心云南省昆明市 650500)摘要:首先分析了交通事件自动检测的研究现状,对两种主要的检测方法进行了描述。
通过对交通参数的分析来判断是否发生事件的“间接方法”,这类方法在过去的十几年里研究和使用的较多。
随着图像处理技术和计算机视觉技术的快速发展,人们逐渐采用通过对视频图像的智能分析来检测事件的发生以及发生了何种事件,该方法检测速度快、时间短,涉及到模式识别、图像处理、计算机视觉和人工智能等,将是未来交通事件自动检测(AID)的前沿方向。
论文的最后分析了交通事件检测可能的研究方向、存在的问题及展望。
关键字:交通事件检测、SVM、视频检测、AID、二次事故中图分类号: 文献标识码: 文章编号:0引言近年来,随着国家高速公路网的飞速发展,给人们带来舒适、快捷服务的同时,也带来了频发的交通事件。
国内的许多城市道路网络及交通需求不断扩大,载重量和行驶速度也不断提高,尤其是大中城市的车流量与日俱增,带来了越来越多的交通事故和道路拥堵,各类交通事件和二次事故明显增多,给人们的出行买下了安全隐患。
为了可以迅速检测和处理道路上发生的交通事件,减少由于交通事件所带来的人员伤亡、财产损失等影响,避免二次事件的发生,节约能源,减少污染,准确快速的对交通事件进行检测显得尤为重要。
20世纪80年代末期,以高新技术为基础的智能交通系统(Intelligent Transport System,ITS)概念和技术被提出,并在短短的时间内得到了了迅速的发展[1]。
交通事件作为其重要组成部分,是指非周期性发生且使某段道路通行能力下降的事件。
如交通事故、故障停车、货物散落、道路维修、车辆逆行、车道变换、超速、慢速、停止、交通阻塞等[6]。
智能交通监控中运动目标检测与跟踪算法

基于光流法
95% 85% 75% 50% 45%
0 10 20 30 40 5
总结词:通过分析图像中像素点的运动矢量,识别出 运动目标。
详细描述
1. 算法原理:利用光流场的概念,计算图像中每个像素点的 运动矢量,从而识别出运动目标。
2. 优缺点:光流法能够准确检测出运动目标的轮廓和 轨迹,但计算复杂度高,实时性较差。
行人跟踪
通过对行人的跟踪,实现行人轨迹的 预测和分析,为交通管理和安全防范 提供支持。
交通拥堵检测与预警
交通拥堵检测
通过视频监控和图像处理技术对交通路段的拥堵情况进行自 动检测和识别。
交通预警
通过对交通拥堵的预测和分析,及时发出交通拥堵预警,为 交通管理和调度提供支持。
05
算法优化与பைடு நூலகம்进
多种检测与跟踪算法融合
基于卡尔曼滤波法
总结词
适用于线性系统,具有实时性、稳定性和较小的计算量 。
详细描述
卡尔曼滤波法是一种基于线性系统模型的预测和更新算 法,通过建立状态方程和观测方程,对目标状态进行预 测和更新。该算法适用于线性系统,具有实时性、稳定 性和较小的计算量。在智能交通监控中,卡尔曼滤波法 常用于车辆跟踪、行人检测等任务,但当系统模型不准 确或存在非线性因素时,卡尔曼滤波法的性能会受到影 响。
利用GPU等并行计算资源,加 速目标检测与跟踪的计算过程 。
优化算法复杂度
通过优化算法结构,降低算法 的时间复杂度,提高运算速度 。
分布式系统
利用分布式系统的优势,将目 标检测与跟踪任务分配到多个 节点上,提高整体处理能力。
准确性提升
80%
基于目标检测技术的交通场景分析与优化研究

基于目标检测技术的交通场景分析与优化研究随着城市化进程不断加快,交通问题已成为城市发展的瓶颈,公共交通的拥堵和私家车的增多严重影响着交通效率和安全。
如何利用科技手段优化交通场景,减少交通拥堵和事故率,成为了城市交通管理的重要课题。
而目标检测技术的应用,为优化交通场景带来了新的思路和方法。
一、目标检测技术为交通场景优化带来新思路传统的交通管理方式主要依靠交通标志和交通信号设备,无法满足城市交通管理的日益增长的需求。
目标检测技术的发展引发了一系列创新方案,其基于计算机视觉的先进算法为交通管理提供了新的思路。
目标检测技术是一种人工智能技术,可以自动识别图像或视频中的目标物体,并获取其属性和位置信息。
该技术的应用可以为交通场景优化和管理提供支持,如:1. 实时监控交通状态。
目标检测技术对于视频监控的应用尤为重要,可以有效提高交通安全水平,减少交通事故率。
例如,在路口或构架上搭载全景摄像头,可以通过目标检测技术精确识别交通中的各种车型、行人、动物等,及时发现交通违规情况、重大交通事故事故等,进而做出相应的处置措施。
2. 进一步研究交通现象。
目标检测技术可以通过数据分析推出交通的运行规律和瓶颈点,有利于对交通情况进行及时预测和优化。
例如,在公交管理方面,可以利用目标检测技术从被监控的公交车辆中提取数据,进而推断公交运行路线的准确性和时效性,从而为城市公交运营提供更精准和高效的支撑。
二、如何利用目标检测技术优化交通场景1. 交通指示系统的改善。
通过采用目标检测技术,可以对信号灯的实时状态进行判断,进而做出调整,从而实现交通指示灯的高效使用。
例如,在路口设置智能交通信号灯,可以利用目标检测技术对路口车辆的数量和速度等信息进行追踪和分析,从而实现交通信号优化,减少堵车和交通事故。
2. 实现数码化交通控制。
可以通过建立数字化的交通平台,通过大数据处理和目标检测技术实现交通数据的高效收集和分析,进而实现交通流量、实时路况和交通控制的高效管理。
运动目标检测方法综述
• 65 •ELECTRONICS WORLD ・探索与观察1.概述运动目标检测的解决需依靠智能、有效、可行的识别检测技术,但受限于目前技术发展现状,运动目标检测仍具有研究必要性和广阔的发展前景。
1.1 目标分割技术和检测技术目标检测效果主要受运动目标的大小、位置的变化而改变。
其中因素多种多样,基本包括目标类型的多元化、目标运动速度的不确定性,以及视频采集设备抖动、背景、光照等发生变化或干扰等因素。
此外,由于受背景光照的变化,目标物体在视频序列中的颜色分布会发生变化,从而导致目标特征也随之发生变化,直接影响了目标检测的效率和准确度。
视频采集设备的抖动容易造成背景检测区域的变化,直接对根据背景建模的目标检测方法准确性造成影响;目标类型的多元化和背景干扰给目标检测带来了更多的表示困难,需要适应及泛化能力较好的目标检测和表示模型;目标运动速度的不确定性也会导致目标的丢失。
图1 目标检测的一般方法步骤图2 背景相减法实现流程1.2 目标外形变化视频采集设备发生运动时,会使检测的目标物体的外形尺寸发生旋转、位移变化等几何性质的变化,若快速检测改变后的目标物体则需要实时更新源目标的表示、表现模型。
1.3 被检测目标局部遮挡和多目标相互干扰基于目标全局特征的目标检测识别算法在被遮挡时会导致目标外形发生变化或暂时无法检测的情况,目标提取的准确性直接反应了目标识别算法的优劣,因此,需要鲁棒性强的算法提供目标检测的准确运动目标检测方法综述中国电子科技集团公司第二十二研究所 张 前 赵新雪性。
而多帧之间目标的相互重叠和目标局部特征的刷新也需要进行重新检测。
1.4 目标检测的复杂性对于一般视频采集设备,帧频为25-30帧/s,数据流非常大,而对于目标检测识别算法来说,每帧图像的像素都需要进行处理,提取目标物体的视觉特性,这个过程中需要大量的计算和判断,此外,目标检测识别系统的目的是保证检测识别的准确性,提高目标识别效率,这样就需多特征进行联合匹配,导致目标检测算法复杂度急剧上升,降低了系统的实时性和有效性。
监控系统下的运动目标检测方法[文献综述]
![监控系统下的运动目标检测方法[文献综述]](https://img.taocdn.com/s3/m/80bf9688ec3a87c24028c4c5.png)
利用上述方法二值化差图像 后,其中包含真正的运动信息。
2.3.4目标检测[8]
2.3.4.1运动目标的提取
设n时刻背景参考图像为 ,当前帧图像为 ,则背景差分图像为:
(2.3.7)
对于运动目标检测的判断依据为:若 ,则 点属于运动目标象素,反之属于背景点象素。这里的T是门限阈值。首先需要评估活动值是由运动对象造成的,还是由摄像头的噪声造成的。假设摄像头的噪声是叠加噪声,遵从高斯分布。描述该分布的参数有均值 和标准差 。噪声假设是和空间和时间无关的。基于这些假设,第n帧颜色通道i的强度观测值 可以表达为:
,(2.1.2)
。(2.1.3)
得到运动目标的运动矢量场后,可以对矢量场图像进行分割以获得运动区域。首先由矢量场图像的均值确定阈值。然后对图像进行快速的阈值分割,得到初始的分割图像并对其进行中值滤波和闭运算。最后,由光流检测和形态滤波处理得到的运动目标区域,通过连通分量分析最终确定运动目标的位置。
2.1.3.该方法的特点:
(2.2.9)
2.2.3.3生成背景掩膜:
将当前帧与式(2.2.9)得到的背景帧对应像素相减可以得到背景帧差 ,见式(2.2.10)。
(2.2.10)
背景帧差 与阈值 比较,即可得到背景掩膜 中各点的值 。
(2.2.11)
2.2.3.4运动对象检测:
如果当前时刻像素点 满足条件时 ,也即该点属于背景的可能性是比较大的,那么背景掩膜 能更好地反映当前点的状态;否则,当前帧掩膜 能更好地反映当前点的状态。由当前帧掩膜 和背景掩膜 生成运动对象掩膜 ,并利用其进行运动对象检测。
(2.3.15)
2.3.5.背景更新[8]
由公式(2.3.1)可知每一个象素的背景差分值 ,于是可以得到变化检测掩模如下:
《快速移动目标检测的加速研究》范文

《快速移动目标检测的加速研究》篇一一、引言随着科技的进步和应用的多样化,目标检测技术作为计算机视觉的重要领域,日益得到广大科研人员的关注。
尤其在高速度的动态环境中,如监控、无人机侦测和实时军事行动中,快速移动目标检测的技术变得尤为重要。
然而,传统的目标检测方法在处理高速移动的目标时,往往面临计算量大、实时性差等问题。
因此,对快速移动目标检测的加速研究显得尤为迫切。
本文旨在探讨如何通过算法优化和硬件加速技术来提高快速移动目标的检测速度和准确性。
二、研究背景及意义随着计算机视觉技术的快速发展,快速移动目标检测技术已广泛应用于军事、安防、交通等多个领域。
在复杂多变的环境中,准确快速地检测出目标物体,对于实时决策和反应至关重要。
然而,传统目标检测算法往往需要大量计算资源,在处理高速移动的目标时存在延迟和误检的问题。
因此,研究如何加速快速移动目标的检测,对于提高系统的实时性和准确性具有重要意义。
三、相关文献综述近年来,国内外学者在快速移动目标检测方面进行了大量研究。
在算法层面,深度学习、机器学习等先进算法被广泛应用于目标检测中。
在硬件层面,GPU加速、FPGA定制化加速等技术也为目标检测提供了强大的计算支持。
然而,在处理高速移动的目标时,仍存在计算量大、实时性差等问题。
因此,需要进一步探索算法优化和硬件加速技术来提高检测速度和准确性。
四、研究内容与方法本研究旨在通过算法优化和硬件加速技术来提高快速移动目标的检测速度和准确性。
具体研究内容包括:1. 算法优化:通过改进传统的目标检测算法,如基于深度学习的目标检测算法等,提高算法的准确性和计算效率。
同时,结合运动学原理和图像处理技术,对高速移动的目标进行精确跟踪和识别。
2. 硬件加速:利用GPU加速、FPGA定制化加速等技术,提高计算速度和数据处理能力。
结合具体的硬件设备,对算法进行优化和调试,以达到最佳的计算性能和实时性。
3. 实验设计与分析:设计多组实验,对比不同算法和硬件加速技术在快速移动目标检测中的性能表现。
目标检测算法在交通场景中应用综述
目标检测是计算机视觉领域重要的研究分支,是目标识别、跟踪的基础环节,其主要研究内容是在图像中找出感兴趣目标,包括目标定位和分类。
其中,交通场景目标检测识别是计算机视觉领域研究的热点问题,其目的是运用图像处理、模式识别、机器学习、深度学习等技术在交通场景中检测识别出车辆、行人等交通场景目标信息,达到智能交通、自动驾驶的目标。
传统目标检测方法通常分为三个阶段:首先在图像中选择一些候选区域,然后在候选区域中提取特征,最后采用训练的分类器进行识别分类。
然而,该方法操作复杂,精确度不高且训练速度慢,误检率较高,在实际工程应用中不易实现。
因此,在卷积神经网络快速发展的背景下,研究人员提出基于深度学习的目标检测算法,该方法实现了端到端检测识别,具有很好的实际意义。
如今基于深度学习的目标检测算法已成为机器人导航、自动驾驶感知领域的主流算法。
1目标检测算法综述目标检测算法可以分为基于候选区域(两阶段)和基于回归(一阶段)两类。
两者最大的区别是前者通过目标检测算法在交通场景中应用综述肖雨晴,杨慧敏东北林业大学工程技术学院,哈尔滨150040摘要:目标检测是计算机视觉领域的重要研究任务,在机器人、自动驾驶、工业检测等方面应用广泛。
在深度学习理论的基础上,系统性总结了目标检测算法的发展与研究现状,对两类算法的特点、优缺点和实时性进行对比。
以交通场景中三类典型物体(非机动车、机动车和行人)为目标,从传统检测方法、目标检测算法、目标检测算法优化、三维目标检测、多模态目标检测和重识别六个方面分别论述和总结目标检测算法检测识别交通场景目标的研究现状与应用情况,重点介绍了各类方法的优势、局限性和适用场景。
归纳了常用目标检测和交通场景数据集及评价标准,比较分析两类算法性能,展望目标检测算法在交通场景中应用研究的发展趋势,为智能交通、自动驾驶提供研究思路。
关键词:目标检测;深度学习;交通场景;计算机视觉;自动驾驶文献标志码:A中图分类号:TP391doi:10.3778/j.issn.1002-8331.2011-0361Research on Application of Object Detection Algorithm in Traffic SceneXIAO Yuqing,YANG HuiminCollege of Engineering and Technology,Northeast Forestry University,Harbin150040,ChinaAbstract:Object detection is an important research task in the field of computer vision.It is widely used in robotics,auto-matic vehicles,industrial detection and other fields.On the basis of deep learning theory,the development and researchstatus of object detection algorithm are firstly systematically summarized and the characteristics,advantages,disadvantages and real-time performance of the two categories of algorithms are compared.Next to the three kinds of typical targets (non-motor vehicles,motor vehicles and pedestrians)as objects in the traffic scene,the research status and application of object detection algorithm for detecting and identifying objects are discussed and summarized respectively from six aspects in traffic scene:traditional detection method,object detection algorithm,object detection algorithm optimization,3d object detection,multimodal object detection and re-identification.And the application of focus on the advantages,limitations and applicable scenario of various methods.Finally,the common object detection and traffic scene data sets and evalua-tion criteria are summarized,the performance of the two categories of algorithms is compared and analyzed,and the devel-opment trend of the application of object detection algorithm in traffic scenes is prospected,providing research ideas for intelligent traffic and automatic vehicles.Key words:object detection;deep learning;traffic scene;computer vision;autonomous vehicles基金项目:中央高校业务经费(2572016CB11)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交通场景中运动目标的检测文献综述摘要:运动目标检测是数字图像处理技术的一个主要部分,是一种基于视频监控系统的运动目标检测方法。
这种算法主要包括:图像预处理、运动目标的检测、运动速度的求取。
运动目标分割是实现交通场景下车辆检测的前提。
常用的分割方法可以分为背景差分法、帧间差分法和基于光流的分割方法等。
关键词:数字图像处理;运动目标;检测方法1 前言运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睐,并且取得了丰硕的成果,广泛英语与交通管理、军事目标跟踪、生物医学等领域。
目前,以数字图像处理技术为核心的视频监视系统越来越广泛地应用到交通监管中,它利用摄像机来获取图像,由计算机完成对运动目标的自动检测,如果车辆交通违规时,自动发出预警,记录全程违章视频,这在很大程度上减轻了监控人员的劳动强度,克服可能的人为失误,而且节省大量存储空间,使存储的数据更为有效,为交通违规的后续处理提供了客观依据。
交通场景中运动目标的检测是本文的研究对象。
结合图书馆书籍、网上资料以及现有期刊杂志的相关信息,初步建立起交通场景中运动目标检测课题研究的整体思路和方法。
2 正文2.1运动目标运动目标是常生活中常见的.如活动的动物、行驶的运载工具等。
在现实生活中,尽管人类的视觉既能看见运动又能看见静止的物体,但是在交通这样的复杂场景中大量有意义的视觉信息都包含在这些运动之中,人们往往只对运动的物体或目标感兴趣。
因此,研究运动目标的检测问题,有着很大的现实意义和应用价值。
2.2运动目标检测的基本概念目前我们主要是通过对动态图像进行分析处理来获取运动目标信息,从而实现对运动目标的检测,它是图像处理与计算机视觉应用研究领域的一个重要课题。
,所谓动态图像是由一序列图像组成的,即图像序列。
图像序列是用一个传感器(如摄像机、数码相机)采集的一组随时间变化的图像,不同时刻采集的二帧图像或多帧图像中包含了存在于相机与景物之间的相对运动信息。
还有景物本身发生变化的运动信息等等,这些信息表现为图像帧之间的灰度变化或诸如点、线、区域等记号的位置和运动方向速度等属性的变化。
运动目标检测的目的就是从序列图像中将变化区域从背景图像中提取出来。
我们首先用摄像机获取运动目标的视频影像,经视频采集卡将视频信号传输到计算机,利用计算机对其进行相关处理,从视频图像中按一定时间间隔获取序列图像,然后通过对这些序列图像进行特定的处理,就可以检测出我们感兴趣的运动目标。
运动目标检测和分析是一种基于视频监控系统的运动目标检测方法。
这种算法主要包括:图像预处理、运动目标的检测、运动速度的求取。
这种算法在帧差法的基础之上,提取出运动目标,并对其求取运动速度。
这种技术可以用于各类图像监控系统,用来检测运动目标,对于现实应用有重要意义。
2.3运动目标检测的基本方法由运动目标所形成的图像序列可分为两种情况:一种是静止背景,一种是运动背景。
前一种情况通常发生在摄像机相对静止状态(如监视某一路口车流量的固定摄像机),后一种情况通常发生在摄像机也在相对运动状态(如装在卫星或飞机上的监视系统)。
从处理方法上看,对前一种情况可采用消除背景的方法检测运动目标,处理起来比较简单,如简单的帧间差分或自适应背景对消方法。
对后一种情况.处理起来比较复杂,一般是采用突出目标或消除背景的思想检测运动目标。
若采用消除背景的方法,则通常需要先进行帧间稳像及配准;若采用突出目标的方法,则需要在配准的前提下进行多帧能量积累和噪声抑制。
运动目标分割是实现交通场景下车辆检测的前提。
常用的分割方法可以分为背景差分法、帧间差分法和基于光流的分割方法等。
(1)光流场法所谓光流是指图像中灰度模式运动的速度:它是景物中可见点的三维速度矢量在成像平面上的投影,它表示了景物表面点在图像中位置的瞬时变化;同时光流场携带了有关运动和结构的丰富信息。
光流场法的优点是能够检测独立运动的对象,不需要预先知道场景的任何信息,并且可用于摄像机运动的情况,但由于噪声、多光源、阴影、透明性和遮挡性等原因,使得计算出的光流场分布不是十分可靠和精确,光流场的计算实时性和实用性较差,多数光流法计算复杂耗时,很难实现实时检测。
基于光流的分割方法运算复杂度较大且对噪声敏感,因而常见的适合交通场景下分割运动目标的方法主要使用前面两种。
使用基于帧差的算法进行目标检测,当场景中运动目标没有显著运动时,往往会在目标检测时留下大面积未被检测到的区域,而这些区域本应属于目标。
(2)邻帧差法在假设用于获取序列图像的摄像机是静止的前提下,检测运动目标的最简单的方法是帧间差阈值法,也叫邻帧差法,或相继图像差分法。
其基本思想是直接对运动目标的连续两帧图像进行差分。
邻帧差法的优点是它只对运动物体敏感.实际上它只检测相对运动的物体.而且因为两帧图像的时间间隔较短。
差分图像受光线变化的影响较小,检测有效而且稳定,非常适合于动态变化的环境;该算法速度快,易于硬件实现,但是很难求出运动物体的速度,且当运动物体在成像平面有重叠时。
邻帧差法难以检测出有重叠的运动物体。
(3)背景差分法在摄像头固定的情况下,背景减法是常用的运动目标检测方法。
背景减法的基本思想是将当前帧图像与事先存储或者实时得到的背景图像相减,即当前图像与已知背景图像之间的差分,首先根据实际情况设定一个阈值,若像素的差值大于这一阈值,则判断此像素为运动目标上的.经过阈值操作后得到的结果直接给出了需检测的运动目标的位置、大小、形状等信息。
但这种简单的背景减法方法对光线、天气等光照条件的变化非常敏感.导致运动目标的阴影也常常被检测为运动目标的一部分,这将影响到运动目标检测结果的准确性。
基于光流的分割方法运算复杂度较大且对噪声敏感,因而常见的适合交通场景下分割运动目标的方法主要使用其余两种。
使用基于帧差的算法进行目标检测,当场景中运动目标没有显著运动时,往往会在目标检测时留下大面积未被检测到的区域,而这些区域本应属于目标。
3 运动目标检测中的难点运动目标检测是指从视频流中实时提取目标,一般是确定目标所在的区域和颜色特征等,目标检测的结果是一种静态目标-前景目标,由一些静态特征所描述,运动目标跟踪则指对目标进行连续的跟踪以确定其运动轨迹。
受跟踪的目标是一种“动态”目标——运动目标,与前景目标相比,描述它的特征中多了动态特征(如运动参数等)。
目标跟踪时则通过匹配目标的位置、大小、形状和颜色等特征,建立运动目标与前景目标间的对应关系。
运动目标检测方法的常见问题有:(1)背景获取:需要在场景存在运动目标的情况下获得背景图像(2)背景扰动:背景中可以含有轻微扰动的对象,如树枝、树叶的摇动,扰动部分不应该被看作是前景运动目标(3)背景中固定对象的移动:背景里的固定对象可能移动,如场景中的一辆车开走、一把椅子移走,对象移走后的区域在一段时间内可能被误认为是运动目标,但不应该永远被看作是前景运动目标(4)背景的更新:背景中固定对象的移动和外界光照条件的变化会使背景图像发生变化,需要及时对背景模型进行更新,以适应这种变化。
(5)阴影的影响:通常前景目标的阴影也被检测为运动目标的一部分,这样讲影响对运动目标的进一步处理和分析4 总结实际的视频监控系统应用的场景往往是错综复杂、变化较大的,事先具有准确性、实时性和鲁棒性的运动目标检测是当前智能视频监控技术的研究方向。
在本次设计中对交通系统中车辆检测技术进行研究,在分析总结现有算法的基础上,试图提出一种实时车辆检测方法。
本次设计的基本思路是:首先利用统计学方法快速建立初始背景图像,然后通过分析交通场景中背景像素和前景像素的像素值特性,利用差分图像直方图来动态获取阈值,建立当前帧顺势背景图像和前一帧背景图像加权平均的更新算法估计当前帧的背景图像。
参考文献[1]于慧敏,徐艺,刘继忠等.基于水平集的多目标运动时标分割与跟踪. 中国图形图像学报[J],2007,12(7);1218-1223[2] 李俊韬,张海,范跃祖.复杂交通场号中多运动目标分割算法.北京航天航空大学学报[J],2006,32(3):297-300,[3] 李晴,徐群.复杂场景下多运动目标速度检测技术的实现 .计算机与数字工程[J].2006,34(11)167-171[4] 陈景波,陆建明,邬正义,谈正.交通场景中多目标的检测与跟踪. 现代电子技术[J],2008(01):66-70[5]万卫兵,霍宏,赵宇明著,《智能视频监控中目标检测与识别》[M],上海,上海交通大学出版社,2010.1[6] 王陈阳,周明全,耿国华.基于自适应背景模型运动目标检测 .计算机技术与发展[J],2007(04):54-57[7] 吕国亮,赵曙光,赵俊.基于三帧差分和连通性检验的图像运动目标检测新方法.液晶与显示[J],2007(2):87-92[8]孙状,宋正河,毛恩荣,吕安涛.高清视频车辆检测及跟踪系统的设计与实现.中国农业大学学报[J],2009(06):112-115[9]Ulisses Braga-Neto,Manish Choudhary,Johan Goutsias.Automatic target detection and tracking in forward-looking infrared image sequences using morphological connected operators.Journal of Electronic imaging,June 2003,3:1-22.[10] Ji X P, Wei Z Q, Feng Y W. Effective vehicle detection technique for traffic surveillance systems. J Visual Commun Image Represent, 2006, 17(3): 647.。