实验2-利用SIMULINK进行制导弹道仿真
导弹最优导引律仿真分析(例子)
到限制,导弹结构能承受的最大过载也受到限制,所以控制信号 u 应该受到限制,因此,选
择下列形式的二次型指标函数
( ) ( ) ∫ ( ) J = 1 X T 2
tf
CX t f
+ 1 tf 2 t0
X T QX + U T RU dt
⎡c1 0 0 0 ⎤ ⎡0 0 0 0⎤
式中,
C
=
⎢ ⎢
0
c2
0
0
⎥ ⎥
,
Q
=
⎢⎢0
0
0
0⎥⎥
⎢0
⎢ ⎣
0
0 0
c3 0
0⎥
c4
⎥ ⎦
⎢0 0 0 0⎥ ⎢⎣0 0 0 0⎥⎦
2.2.2 最优导引律
(11)
完全考虑弹体二阶振荡环节时,假定目标不机动,导弹运动的状态方程见式(8),即
•
X = AX + Bu
(12)
⎡0 1 0 0 ⎤ ⎡ 0 ⎤
式中, A = ⎢⎢0 0 VD ⎢0 0 0
]
2(t f − t)2 + 6(t f − t)
ω
ω2
−
15 4ω
2
3
]
K3 (t) =
KDVD [(t f
− t)3
3 ω2 3 −
(t f
−t −
3 )2 ω
2(t f ω
− t)2
+
6(t f − t) ω2
−
15 4ω
2
3
]
最优导引方框图如图 3 所示。
6
u(σ )
KDω 2
+
1 s x4 1 s x3 VD +
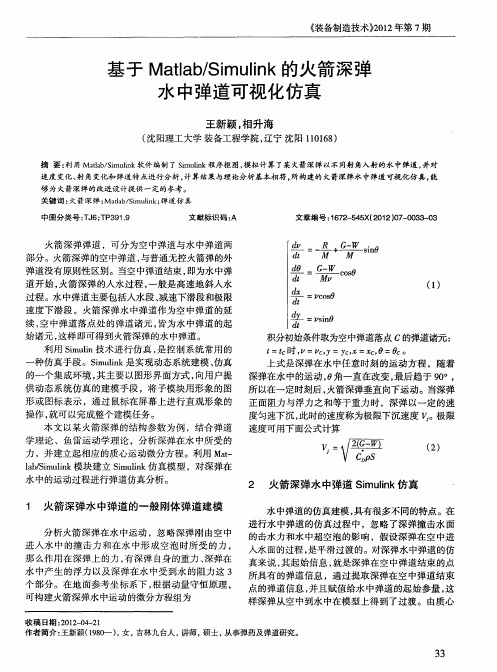
基于Matlab/Simulink的火箭深弹水中弹道可视化仿真
爹 c o s
d£
㈩
=z0O , s c : i0 sn
t
积分初始条件取为空中弹道落点 C的弹道诸元 : £ c , cY y , C0 。 =t 时 = , c =X , = 上式是深弹在水 中任意时刻 的运动方程 ,随着 深弹在水 中的运动 , 角一直在改变 , 0 最后趋 于 9  ̄ 0, 所 以在一定时刻后 , 火箭深弹垂直 向下运动。当深弹 正面阻力与浮力 之和等于重力时 ,深弹 以一定 的速 度匀速下沉 , 此时的速度称为极限下沉速度 。 极限 速度可用下面公式计算
、
3 6 3 6 3 7 3 7 3 8 3 8 3 9 40 , 5 4O 1 4 5 40 45 40
1 2 13 3 514 3 51 5 3 5 3 0 16 3 0 35 3 013 3 01 4 3 015 I 6 3 517
距离 ( m)
距 离( ) m
关 键 词 : 箭 深 弹 ; db S lk 弹 道 仿 真 火 Ma a/i i ; mun 中图 分 类 号 :J ; P 9 . T 6 T 3 19 文 献 标识 码 : A 文 章 编 号 :6 2 5 5 2 1 0 — 0 3 0 1 7 — 4 X( 0 2)7 0 3 — 3
不同的射角人水后 , 在水中垂直段的射角均变为 9 。 0;
航 天大学 出版社 。0 9 20 .
Ba e nt e Ma lb/ muik Ro k t p h Ch r e Un e wa e s d o h t a Si l c e n De t a g d r t r
l ・ 6 以某 火箭 深弹 为例 ,初始射 角分别 为 4 。和 5 15 ・ 1o 行 弹道仿 真 和分 析 。 2进 曼1 . 3 31 速度 变 化规 律 . 火 箭 深 弹 以一 定 的初 速 和射 角 到 达水 面 ,进入 水 中, 深弹首先作减速运动 , 然后进人极限下潜段。 以某火箭深弹为例 , 以两种不 同的初始射角 , 经过仿 真 系统 得 到 的速 度变 化 图如 图 2所 示 。
基于SIMULINK的某型反坦克导弹平射弹道特性研究

0引言反坦克导弹是陆军反装甲作战的重要武器。
在反坦克导弹的设计阶段,弹道方案的充分论证、设计和分析是导弹成功研制的重要前提。
反坦克导弹目前已经发展第三代,具有“发射后不管”的特点,其外弹道特征与前两代反坦克导弹相比有较大差异。
平射弹道是第三代反坦克导弹打击近距离目标的一种基本弹道形式,研究第三代反坦克导弹平射弹道的特性,并设计出相应的弹道方案,对研制导弹的制导系统有着非常重要的意义。
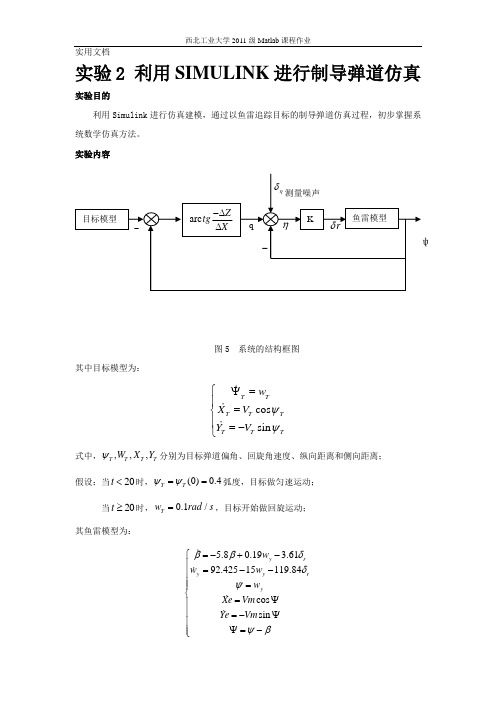
1导弹质点弹道模型1.1导弹基本情况该型导弹为钝头圆柱外形、十字翼舵布局,弹径为127mm 。
外形如图1所示。
在进行弹道设计之前,已经完成了气动仿真和风洞试验工作,获得了相关气动力参数数据。
根据导弹结构、技战术指标和气动力参数,确定了最大攻角不超过40°,最大舵偏角不超过25°的指标。
1.2基本假设导弹的运动方程组是确定导弹外弹道方案的基础。
为了对导弹的主要外弹道特性进行研究,需要对导弹的受力状况作合理的简化,以达到能将导弹视为质点的目的[1]。
通常采用以下假设:①导弹绕弹体轴的转动是无惯性的,即假设转动惯量为0;②导弹控制系统能够理想控制,既无误差也无时间延迟;③不考虑横风等干扰因素对导弹的影响;④假设导弹处于“瞬时平衡”状态,认为导弹在任一瞬时都处于平衡状态。
该型导弹属于第三代反坦克导弹,有攻顶打击和侧面打击两种攻击方式。
攻顶方式适用于打击暴露状态下的装甲目标,一般情况下为首选方式。
但在某些时机下,例如对顶部有掩蔽的装甲目标、某些野战或永备工事、城市建筑物中的火力点进行攻击时,也需要导弹能够实施侧面打击。
侧面打击所对应弹道即为平射弹道。
平射弹道主要分为四个阶段:无控段、爬升段、定攻角飞行段和比例导引段。
导弹出筒后即进入无控段;发动机开始工作后即进入爬升段;当导弹按照爬升段的控制方案飞行至弹道顶点(即弹道倾角为0°时对应的位置)时,导弹进入定攻角飞行段;当目标进入捕获域时,导弹进入比例导引段,直至击中目标位置。
实验2-利用SIMULINK进行制导弹道仿真
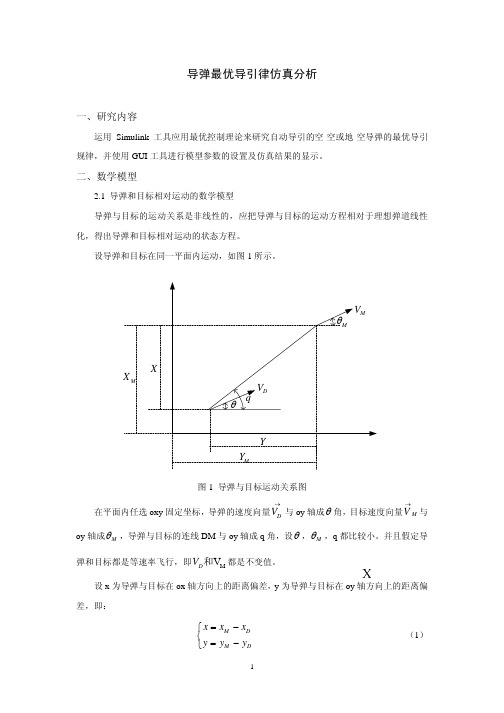
实验2 利用SIMULINK 进行制导弹道仿真 实验目的利用Simulink 进行仿真建模,通过以鱼雷追踪目标的制导弹道仿真过程,初步掌握系统数学仿真方法。
实验内容图5 系统的结构框图其中目标模型为:cos sin T T T T T T T T w X V Y V ψψ⎧ψ=⎪=⎨⎪=-⎩式中,,,,T T T T W X Y ψ分别为目标弹道偏角、回旋角速度、纵向距离和侧向距离;假设:当20t <时,(0)0.4T T ψψ==弧度,目标做匀速运动;当20t ≥时,0.1/T w rad s =,目标开始做回旋运动;其鱼雷模型为:5.80.19 3.6192.42515119.84cos sin y r y y ry w w w w Xe Vm Ye Vm ββδδψψβ⎧=-+-⎪=--⎪⎪=⎪⎨=ψ⎪⎪=-ψ⎪ψ=-⎪⎩式中,,,,,,,,y w r Vm Xe Ye βδψψ分别为鱼雷的侧滑角、回旋角速度、直舵角、航向角、弹道偏角、速度,地面坐标系中的X 轴和Z 轴坐标。
Vm=25m/s 。
鱼雷与目标的相对距离为,,T T X X Xe Y Z Ze ∆=-∆=-。
q 为地球视线角,q ηψ=-为雷体系中的提前角。
操舵规律,0.5,10r K K r δηδ=-=≤。
终端脱靶量定义为t f r =鱼雷模型仿真初值为:(0)(0)(0)(0)(0)(0)0.25/y w r Xe Ze Vm m s βδψ=======。
目标模型仿真初值为:(0)5/,(0)(0)1500,(0)0T T T T V m s X Z m w ====实验步骤由图5所示的系统控制结构图可知,该系统大致可以分为三个部分:目标模型,鱼雷模型以及观察模块。
1.根据目标模型和鱼雷模型的数学方程组,调用Simulink 工具箱模块库中的所需模块建立目标模型和鱼雷模型。
2.根据系统结构框图完成整个系统仿真模型的搭建,如图6 所示。
基于MATLAB/Simulink的弹道仿真模块化设计

The Incorporate Simulation of the M issile Traj ectory Based on M ATLAB/Simulink
ZHA()Jun-min.HE Ya—juan (N o.203 Research Institute of China O rdnance Industries.Xi’an 710065.China) Abstract:In this paper.the incorporate ballistic simulation model of missile trajectory is based on the Simulink toolbox in the M atlab language. Using this method,the dynamic system simulation becomes easy and visua1.increasing this model transplant. The relevant results are given tO a determ inate condition.the results have been validated. Key words{MATLAB/Simulink;sim ulation of missile trajectory;incorporate
Simulink完成某 型 号 制 导 导 弹 的 弹 道 模块 化 设
计 ,为 总体 性 能及控 制 系统 的分析 提供 平 台。
3 弹 道பைடு நூலகம் 真模 块 化 设 计
2 弹 道 仿 真 模 块 化 设 计 思 想
弹道 仿真模 块 的设 计 分 三 步 :(1)根 据 弹道 仿 真系 统 的 任 务 及 功 能 ,将 系 统 分 为 若 干 个 模 块 ,确定 各模块 的输 入输 出信 号流 ;(2)分别 构 建 各模 块 的 内容 ;(3)模 块封 装 ,闭合 大 回路 。
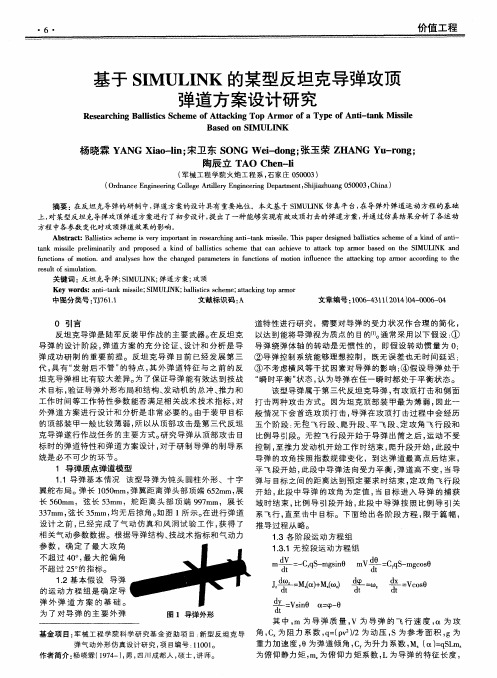
基于SIMULINK的某型反坦克导弹攻顶弹道方案设计研究
Ab s t r a c t :Ba l l i s t i c s s c h e me i s v e r y i mp o r t a n t i n r e s e a r c h i n g a n t i — t a n k mi s s i l e . T h i s p a p e r d e s i g n e d b a l l i s t i c s s c h e me o f a k i n d o f a n t i — t a n k mi s s i l e p r e l i mi n a r i l y a n d p r o p o s e d a k i n d o f b a l l i s t i c s s c h e me t h a t c a n a c h i e v e t o a t t a c k t o p a r mo r b a s e d o n t h e S I MUL I NK a n d f u n c t i o n s o f mo t i o n .a n d a n a l y s e s h o w he t c h a n g e d p a r a me t e r s i n f u n c t i o n s o f mo t i o n i n f l u e n c e he t a t t a c k i n g t o p a l T a o r a c c o r d i n g t o t h e r e s u l t o f s i mu l a t i o n .
摘要 : 在反坦克导弹的研制 中, 弹道方案的设计具有重要地位 。本文基 于 S I MU L I NK仿真平 台, 在导 弹外弹道运动 方程 的基础 上, 对某型反 坦克 导弹攻顶 弹道方案进行 了初步设 计, 提 出了一种能够 实现有 效攻顶打 击的弹道方案 , 并通过仿真结果分析 了各运 动
仿真技术试验(探测专业)——实验二 导弹的纵向运动仿真建模
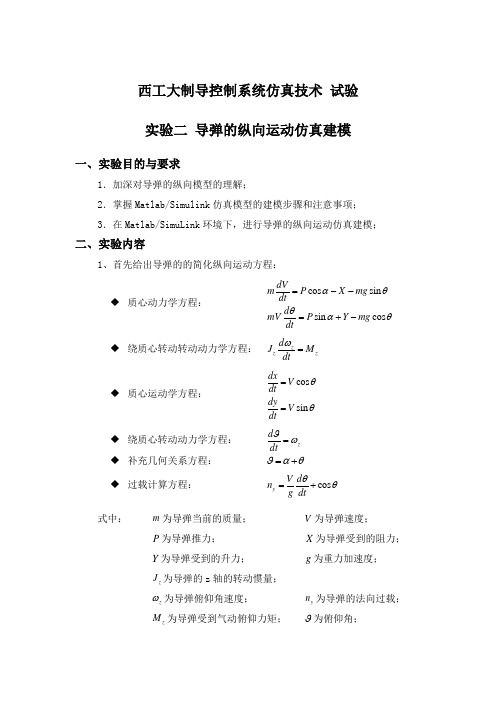
西工大制导控制系统仿真技术 试验 实验二 导弹的纵向运动仿真建模一、实验目的与要求1.加深对导弹的纵向模型的理解;2.掌握Matlab/Simulink 仿真模型的建模步骤和注意事项; 3.在Matlab/SimuLink 环境下,进行导弹的纵向运动仿真建模;二、实验内容1、首先给出导弹的的简化纵向运动方程:◆ 质心动力学方程:cos sin sin cos dVmP X mg dtd mV P Y mg dt αθθαθ=--=+-◆ 绕质心转动转动动力学方程: zzz d J M dtω= ◆ 质心运动学方程:cos sin dxV dtdyV dt θθ==◆ 绕质心转动动力学方程: z d dtϑω= ◆ 补充几何关系方程: ϑαθ=+◆ 过载计算方程:cos y V d n g dtθθ=+ 式中: m 为导弹当前的质量;V 为导弹速度; P 为导弹推力; X 为导弹受到的阻力; Y 为导弹受到的升力;g 为重力加速度;z J 为导弹的z 轴的转动惯量;z ω为导弹俯仰角速度;y n 为导弹的法向过载;z M 为导弹受到气动俯仰力矩;ϑ为俯仰角;θ为弹道倾角; α为攻角。
2、下面给出导弹的弹体参数: ● 弹体参数:弹体质量:0m =250;转动惯量:315Jz =;参考面积:0.45S =参考长度: 2.5L =;发动机推力:1000P =;质量秒消耗量:0.46dm = ● 阻力计算公式:x X C qS =,其中:220x x x C C C αα=+,00.2x C =,20.0005x C α=● 升力计算公式:y Y C qS =,其中:z y y y z C C C δααδ=+,0.25y C α=,0.05z y C δ=● 俯仰力矩计算公式:z z M m qSL =,其中:z z z z z m m m δααδ=+,-0.1z m α=,-0.024z z m δ=3、下面给出导弹的控制系统:图 1 导弹的俯仰控制系统图中,控制系统的参数:Kwz = -0.05,Kpny = 0.1,Kiny = 2。
炮弹运动方程

最后,很感谢周老师这个学期来对我们的细心教导,使我们学到了很多东西,特别是MATLAB这个使用型的软件,对于我们以后工作一定有很大的帮助,在这里祝周老师工作顺利!天天开心!
Integrator:此为积分模块。
Scope:此为示波器,用于显示最后结果。
运行后可以得到如下结果:
四、实验感想
1、学会了使用Simulink工具箱对一些简单实际问题进行动态仿真,从而得到无法用计算得到的复杂结果,特别是用Scope显示的图形直观、形象、快速、易于理解。我很感兴趣,我还要继续深入地学习;
三、实验分析及结果
根据题目,用simulink仿真的图形如下:
注:0.0004905为2g/v02的值。
图中模块说明如下:
Constant:此为常数模块,在整个过程中都是9.81。
Product:此为乘法模块,可用于多个数相乘。
Gain:此为增益模块。
Math function:此为数学函数模块,可通过改变参数来调用不同的数学函数,上图中我们用了开根号(sqrt)和平方。
《
学院
信息科学技术学院
班3号
实验项目名称
炮弹运动方程仿真
指导
教师
周小云
一、实验目的
[1]学习由实际问题去建立数学模型的过程;
[2]学会借助于matlab软件的simulink工具箱进行动态仿真。
二、实验内容
且已知:v0=212m/s,y’(0)=150,y(0)=50,x’(0)=150,x(0)=50利用simulink对其过程进行仿真。
导弹六自由度simulink仿真模型
最近发现有不少人需要导弹六自由度Simulink仿真模型,而且大家好像对导弹Simulink建模比较关心,这里我就把我做的一个导弹六自由度Simulink仿真模型分享给大家以作参考。
导弹六自由度Simulink仿真模型6DoF Animation:动态显示Environment:环境模型(大气、重力)Airframe:导弹运动模型Solid Motor:发动机模型环境模型(大气、重力):采用基本模块完成气动模型集成到导弹运动模型中:Enjoy it!!!谣言:吃太咸了会得病?导语:“人体每日摄入食盐不应过多,否则易患多种疾病。
”这是真的吗?吃太咸了会得病?一、网友评论:1、网友:冰冰23 岁行政助理我就是一个”重口味“的人,但身体很健康啊!我就是一个特别爱吃咸的人,什么咸菜、咸烧饼都是我的最爱。
大家都说吃太咸对身体不好,可我一点没这么觉得。
前几天我还到医院去体检,各项指标都很正常。
吃咸不会得病的!2、网友:小帅34岁销售邻居家大爷常年吃太咸,结果得了心血管病。
邻居家有个大爷经常吃咸的东西,大家都劝他不要吃这么咸,可他就是不听。
后来他被检查出了心血管疾病,我想这和常年吃咸有很到关系。
世界卫生组织建议每人每天钠盐摄入量不超过5克二、专家解答:1、世界卫生组织建议每人每天钠盐摄入量不超过5克。
世界卫生组织(WHO)建议每人每天钠盐摄入量不超过5克,而我国现在每人每日食盐约12克、美国提倡的人均2.3克/天宽松了许多。
2、高盐饮食会导致高血压。
营养专家原表示,高盐饮食是高血压的三大原因之一,高盐饮食是我国高血压的最重要的危险因素。
古人就知道“味过于咸,大骨气劳,短肌,心气抑”,即多食咸会影响血液和血液循环,伤及骨骼,并使心功能受到抑制。
盐摄入平均每增加2克,收缩压和舒张压就分别增加2.0mmHg和1.2mmHg。
“有的人以为‘不吃盐没力气’,这是没有道理的。
”专家表示,人对钠盐的依赖,只是长期以来味觉适应了高盐。
导弹六自由度建模与仿真实验
制导与控制导弹六自由度建模与仿真实验制导与控制实验报告一、实验目的通过典型导弹制导控制系统的特性分析与创新设计,培养对制导武器控制系统的概念理解、分析设计、试验验证的能力。
具体包括:培养使用MA TLAB Simulink软件建模的能力;掌握制导控制系统设计的方法和技术;掌握分析制导控制系统性能的试验方法。
二、实验器材计算机MATLAB Simulink仿真软件三、实验内容与要求(一)实验内容以典型导弹为对象,进行弹体运动特性分析,设计制导律和控制回路,利用MATLAB Simulink软件进行分析验证。
实验1:导弹弹体的建模与仿真根据典型导弹动力学、运动学方程,进行弹体运动特性分析,编写弹体仿真模型,并进行无控弹道仿真;实验2:制导律和控制律设计根据导弹的运动学模型,设计制导律;推导弹体运动的传递函数,进行导弹控制回路设计;实验3:导弹系统闭环仿真基于所设计的制导控制律和弹体模型,采用MATLAB Simulink软件进行制导控制系统闭环数学仿真。
(二)实验要求进行弹体运动特性分析,给出弹体运动特性分析结果;编写弹体仿真模型并进行仿真,绘制无控弹道飞行数据曲线;应用比例导引法设计制导律,给出制导律的设计思路、设计过程,列写设计结果——制导方程;应用经典控制理论进行导弹控制回路设计,给出控制律的设计思路、设计过程,列写设计结果——控制方程;编写制导控制律的仿真模型将无控弹体的仿真模型和制导控制律的仿真模型结合起来,进行闭环数学仿真,分析所设计的制导控制律的性能,给出对制导控制律性能的分析结果,绘制制导弹道飞行数据曲线。
四、实验原理(一)坐标系的定义1)发射坐标系o xyz发射坐标系的原点选择在投弹点地心矢径与地球表面的交点o,ox轴在过o点的水平面内,指向发射瞄准方向,oy轴垂直于过o点的水平面指向上方,oz轴与xoy平面相垂直并构成右手坐标系,xoy 平面称为射击平面。
2) 弹体坐标系1111o x y z -弹体坐标系的原点1o 为炸弹质心。
实验二Simulink仿真实验分析解析

实验二Simulink仿真实验分析解析实验二Simulink仿真实验一、实验目的:1、学会使用Matlab软件中的Simulink仿真工具。
2、了解二阶系统瞬态响应指标的意义其计算。
二、实验内容及原理1、用Matlab仿真(simulink)图示系统输入单位阶跃信号1(t)的响应,分析响应曲线的稳态响应X oss(t),振荡频率ωd(rad/s),超调量M p,峰值时间t p,进入稳态值+5%误差带的调整时间t s。
三、实验步骤:1、使用Matlab软件,进入Simulink编辑画面。
2、用Linear,Sinks,Sources,模块库建立系统的函数方块图。
3、运行Simulink。
4、记录输出曲线,分析实验结果。
四.分析实验结果,写出实验报告。
Step ResponseTim e (sec)A m p l i t u d e 00.20.40.60.811.21.41.61.8G1=tf([100],[50 4 0]);H1=tf(0.02,1);disp('负反馈系统闭环传递函数为:')sys=feedback(G1,H1)step(sys,1:0.1:200)实验三频域分析实验一、实验目的学会使用Matlab 绘制系统Nyquist 图和Bode 图。
二、实验内容及原理两单位负反馈控制系统开环传递函数分别为:)5)(1(5)(1++=s s s s G 和)1()1(10)(22-+=s s s s G 1、利用Matab 软件画出开环Nyquist 曲线。
2、利用Matab 软件画出开环系统Bode 图,求开环频域指标:剪切频率ωc 、相位穿越频率ωg 、相位裕量γ和幅值裕量K g 。
三、实验步骤1、编辑程序,绘制系统Nyquist 图和Bode 图。
2、记录输出曲线,分析实验结果。
四、写出实验报告1、num1=[5];den1=conv(conv([1 0],[1 1]),[1 5]); sys1=tf(num1,den1);nyquist(sys1)num2=[10 10];den2=conv(conv([1 0 0],[1 0 0]),[1 -1]); sys2=tf(num2,den2);nyquist(sys2)Nyquist DiagramReal AxisI m a g i n a r y A x i snum1=[5];den1=conv(conv([1 0],[1 1]),[1 5]); sys1=tf(num1,den1);margin(sys1)[Gm,Pm,Wg,Wc]=margin(sys1)Gm =6Pm =43.2099Wg =2.2361Wc =Nyquist Diagram Real AxisI m a g i n a r y A x i s0.7793num2=[10 10];den2=conv(conv([1 0 0],[1 0 0]),[1 -1]);sys2=tf(num2,den2);margin(sys2)[Gm,Pm,Wg,Wc]=margin(sys2)Gm =Pm =M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = -35.1 deg (at 3.16 rad/sec) Frequency (rad/sec)121.2983Wg =Wc =2、分析实验结果。
基于Simulink与Unity3D的制导弹药弹道可视化仿真
基于Simulink与Unity3D的制导弹药弹道可视化仿真谭哲卿;辛长范;阚煌;高鑫;史铭姗【期刊名称】《计算机测量与控制》【年(卷),期】2024(32)4【摘要】针对制导弹药的弹道可视化仿真中,观察视角单一,场景搭建简陋,无法模拟战场环境下制导弹药在攻击中的动态过程等问题,提出一种制导弹药弹道可视化模型的搭建方法;以某型激光制导弹药为对象,基于Simulink与Unity3D软件建立了联合仿真模型,采用Matlab/Simulink软件构建六自由度弹道仿真模型,采用Unity3D搭建包括制导弹药、目标和战场环境在内的三维场景,采用UDP通信协议将Simulink中的仿真数据传输到Unity3D中,提出一种数值可视化技术,能同时观察制导弹药的飞行姿态和仿真数值结果,实现制导弹药在战场环境下的弹道可视化仿真;将制导弹药参数加载到仿真模型中,对不同状态的目标进行了模拟攻击实验,实验结果显示,该仿真模型能够多视角、全方位地显示制导弹药的飞行姿态、弹道和过载情况,对于需要修改参数以逼近实战条件下的攻击过程,每次修正都能立刻通过可视化平台查看和验证修改结果;该可视化仿真模型为制导弹药的可视化仿真提供了便利的方法,对制导弹药的设计和作战使用具有一定的参考作用。
【总页数】7页(P293-299)【作者】谭哲卿;辛长范;阚煌;高鑫;史铭姗【作者单位】中北大学机电工程学院【正文语种】中文【中图分类】TJ765.4【相关文献】1.制导弹药六自由度运动的Simulink建模仿真2.基于Matlab/Simulink的火箭深弹水中弹道可视化仿真3.基于SIMULINK的激光制导炸弹弹道仿真实现4.MATLAB/Simulink仿真技术在《弹药制导与控制技术》教学中的应用因版权原因,仅展示原文概要,查看原文内容请购买。
基于Matlab Simulink的弹道仿真方法
海 军航 空 工 程 学 院 学 报
J o u r n a l o f Na v a l Ae r o n a u t i c a l a n d As t r o n a u t i c a l Un i v e r s i t y
20l 5
第3 0 卷 第2 期
件 而陷入被动 , 这在一定程度上影 响 了试验进 展 。近 年来 , 国 内关 于导 弹的仿 真 , 大 多集 中于仿 真训 练和
算法及输 出形式 。力求 在模型 的组 合 、 算法 的选 择及
气动力数据 的插值方面提供灵活便利 的操作方式[ 6 1 。
+ + 0
k
仿真 视景的研究n , 而对于辅助 导弹飞行试 验结果 分 析、 评定 的仿真研究 相对较少 。为加 强对飞航导 弹武
、
∞ :
.
篡翻
式( 1 ) - ( 3 ) 中: 、 、 表示 3 个方 向的速度分量 ;
、 、 机 推力 偏心 产生 的力 矩分
量; A M 、 埘 、 M , A 为外界干扰力矩 的分量 ; 、 、 y为偏航角 、 俯 仰角 、 滚动 角 ; b 、 ∞ b、 h 为导 弹 弹体相对 于平 台坐标 系的姿态速率 。 1 . 3 子模 型 的建 立 1 ) 控 制系统 模 型 。控 制 系统通 常采 用 的方 案 为
飞行试 验是 导弹研 制定 型过 程 中的一个 关键 环 节 。从 以往 的导 弹飞行试验来看 , 当导弹在 飞行试验
需要 , 建立 多种 子模 型 , 各 子模 型间采 用模块 拼装 方
式, 允许 自由组合 , 通过界 面交互 问答确定仿 真模型 、
中出现故障或 问题 时 , 试验现场 常因欠缺弹道仿 真软
基于SIMULINK的某型潜射水雷水下弹道仿真研究

基于SIMULINK的某型潜射水雷水下弹道仿真研究朱雄勇;张勇;苏广和【摘要】对某型潜射水雷水下无动力运动过程中雷体的受力情况进行了研究,结合海流扰动模型给出了其水下运动的数学模型,并利用可视化仿真软件构造了系统仿真模型,对多种初始条件的水下不同深度的弹道参数进行了研究,给出了仿真结果和分析.【期刊名称】《软件》【年(卷),期】2011(032)004【总页数】3页(P53-55)【关键词】潜射水雷;水下弹道;海流扰动;仿真【作者】朱雄勇;张勇;苏广和【作者单位】海军潜艇学院,山东青岛266071;海军潜艇学院,山东青岛266071;海军潜艇学院,山东青岛266071【正文语种】中文【中图分类】TP3030 引言利用潜艇布放水雷是一种有效、机动性强的攻势布雷方式[1]。
相对于鱼雷具有的自航能力,某型水雷具备无动力的特性,其水下弹道的不稳定性可能造成过大的位移偏差,就不能满足最小布雷间隔的战术要求。
为使该型潜射水雷平稳沉底处于预定布雷区域,并有效满足水雷的最小布雷间隔要求,就必须对其水下运动问题进行深入而细致的研究,为正确指导潜艇布防水雷提供依据。
本文在系统分析该型水雷物理结构和海流扰动的基础上,建立运动模型,并采用可视化仿真工具得出一系列的仿真参数。
1 水雷运动学数学模型本文研究的水雷是带尾翼的轴对称体,假设雷体部分是圆柱形,为了使研究问题能够实现和研究方便,采用的坐标系有以下三种:(1)地面坐标系oxe ye ze。
坐标系原点o选在水雷出管瞬间所在位置,oxe轴指向水雷出管的水平方向,oye轴铅垂向上,oze轴与oxe,oye轴构成右手坐标系。
(2)雷体坐标系oxyz。
坐标系原点o选在水雷的纵轴与过浮心截面的交点上。
该型水雷是轴对称体,所以坐标系原点与浮心重合。
ox轴与水雷纵轴重合并指向雷头。
oz轴从雷尾看向雷头时,轴位于雷体的右侧。
oy轴位于水雷纵对称平面内,垂直于oxz面,按右手法则确定指向。
基于Simulink的无动力自导深弹导引弹道仿真研究
第 3期
指挥控制 与仿 真
Co mma d Co t l S mu ai n n n r & i lt o o
V l 2 No 3 b- 3 . J n2 O u .0l
21 0 0年 6月
文章编号 :17 -8 92 1) 30 7 ・5 6 33 1(0 0 0 —0 10
建议 。
关键词 :无动力 自导深弹 ;导 引弹道 ;Smuik仿真 i l n
中 图 分 类 号 :T6 + J5 l 文 献 标 识 码 :A D 03 6  ̄i n17 .892 1 . .2 Oh 1.9 9 .s. 33 1.0 00 0 0 s 6 3
S mu ai n a d S u y o n p we e mi g De t a g i lt n t d f o No . o r dHo n p h Ch r e
i i e e ta s me o di o s t e smu a i n r s l h w t n e ae e t r so b l x e ta d s e d a ay e n d f r n s u d c n t n , h i l t e u t s o i u d r trf a u e f f i o s s w mo i e t n n p e , n ls e t ei fu n eo ss l g i e i a c , e f u d d s c o , swe l e t n eo i f a g t t nt r b b l yo h l e c f t e f u d d d s n e s l- i e e t r a l a d p h a d v l ct o t e n i - t g s y r mo i p ooa i t f o o i
基于Simulink的简易控制单兵火箭弹弹道仿真
兵 工 自 动 化
先进嗣值与■理
Ad a e a u a t r n a a e e t v nc d M n f c u e a d M n g m n
O. . t ma i n I Au o to 2 0 , 12 , . 0 7 Vo . 6 No 6
摘 要 :单 兵 火 箭弹 的 简 易控 制 ,将 弹体 动 力 学与 运 动 学 、气 动 力计 算 、 简 易姿 态控 制 等模 块连接 建立 了六 自由 度 弹体 运动 数 学模 型 ,并在 Ma a/ iuik 境 下开发 了 由各 模 块 组成 的 全弹 道仿 真 数 学模 型 。针对 初 始段 扰动 等 t b Sm l 环 l n 问题 ,通 过无 控 弹道 与有 控 弹道 的仿真 分析 比较 ,对 初速 较 低 的增程 单 兵 火箭 弹 采用姿 态修 正可提 高射 程和 精度 。 关键 词 :单 兵 火箭 弹 ;弹 道仿 真 ;Sm l k i ui ;六 自由度 弹体 运 动模 型 ;仿 真模 型 n
20 0 7年 第 2 6卷 第 6期
文 章 编 号 : 10 — 5 6 ( 0 7 6 0 3 — 3 0 6 17 2 0 )0 — 0 4 0
基 于 Smuik的简 易控 制单 兵 火箭 弹弹 道 仿真 i l n
王 少 昆, 买瑞 敏 ,周 俊祥 ( 国兵器 装 备集 团第 2 8研 究 所 弹药 技 术研 究 室 ,北京 12 0 ) 中 0 02 2
wh l t jcoy s lt nmah maia d l s e eo e . me t h nt l itr a c , o t s teu c nr l d oe r e tr i ai te t l a mu o c mo e i d v lp d Ai d a eiia dsub n e cnr th n o t l t i a oe
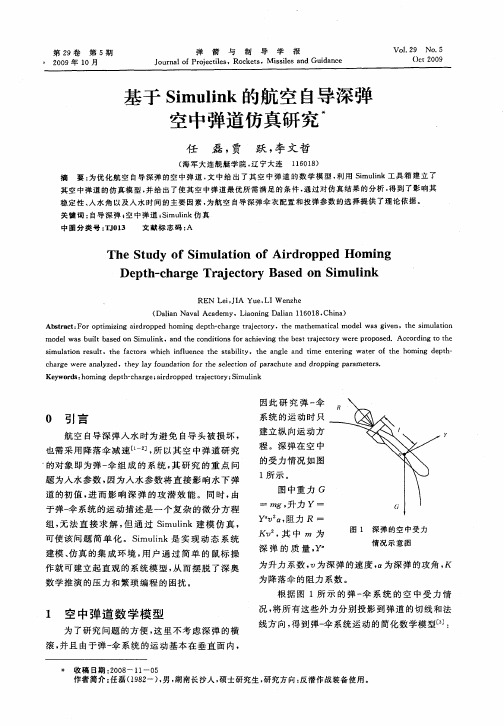
基于Simulink的航空自导深弹空中弹道仿真研究
Ke wod : o n e t —h r e ar r p e rjco y Smuik y rs h migd p h c ag ;id o p d tae tr ; i l n
因此 研 究 弹 一 伞
0 引 言
航 空 自导 深 弹入 水 时为 避 免 自导 头 被 损坏 ,
系统 的运 动 时 只
建 立 纵 向运 动方
程 。深 弹 在 空 中 的受 力情 况 如 图
1所 示 。
也需采 用 降落 伞 减 速[ , 以其 空 中弹 道 研 究 1 所 ] 的对象 即为 弹~ 组 成 的 系 统 , 研 究 的 重 点 问 伞 其
题 为人 水参 数 , 因为入 水参 数 将 直 接影 响水 下 弹 道的初 值 , 而 影 响 深 弹 的攻 潜 效 能 。 同时 , 文 哲 贾 李
161) l 08
( 军大 连舰艇学院 , 宁大连 海 辽
要 : 优 化 航 空 自导 深 弹 的 空 中 弹 道 . 中 给 出 了 其 空 中 弹 道 的数 学 模 型 , 用 Smuik工 具 箱 建 立 了 为 文 利 i l n
其 空 中 弹 道 的 仿 真 模 型 . 给 出 了 使 其 空 中弹 道 最 优 所 需 满 足 的 条 件 . 过 对 仿 真 结 果 的 分 析 ・ 到 了影 响 其 并 通 得 稳 定 性 、 水 角 以 及 入 水 时 间 的 主要 因 素 . 入 为航 空 自导 深 弹 伞 衣配 置 和 投 弹 参 数 的 选 择 提 供 了 理 论 依 据 。
图 中重 力 G
= m 升 力 y — = g, : Y v 口 阻 力 R —  ̄。 ,
图 1 深 弹 的 空 中 受 力
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验2 利用SIMULINK 进行制导弹道仿真 实验目的
利用Simulink 进行仿真建模,通过以鱼雷追踪目标的制导弹道仿真过程,初步掌握系统数学仿真方法。
实验内容
图5 系统的结构框图
其中目标模型为:
cos sin T T T T T T
T T w X V Y V ψψ⎧ψ=⎪=⎨⎪=-⎩ 式中,,,,T T T T W X Y ψ分别为目标弹道偏角、回旋角速度、纵向距离和侧向距离;
假设:当20t <时,(0)0.4T T ψψ==弧度,目标做匀速运动;
当20t ≥时,0.1/T w rad s =,目标开始做回旋运动;
其鱼雷模型为:
5.80.19 3.6192.42515119.84cos sin y r y y r
y w w w w Xe Vm Ye Vm ββδδψψβ⎧=-+-⎪=--⎪⎪=⎪⎨=ψ⎪⎪=-ψ⎪ψ=-⎪⎩
式中,,,,,,,,y w r Vm Xe Ye βδψψ分别为鱼雷的侧滑角、回旋角速度、直舵角、航向角、弹道偏角、速度,地面坐标系中的X 轴和Z 轴坐标。
Vm=25m/s 。
鱼雷与目标的相对距离为,,T T X X Xe Y Z Ze ∆=-∆=-。
q 为地球视线角,q ηψ
=-为雷体系中的提前角。
操舵规律,0.5,10r K K r δηδ=-=≤。
终端脱靶量定义为
t f r =鱼雷模型仿真初值为:
(0)(0)(0)(0)(0)(0)0.25/y w r Xe Ze Vm m s βδψ=======。
目标模型仿真初值为:(0)5/,(0)(0)1500,(0)0T T T T V m s X Z m w ====
实验步骤
由图5所示的系统控制结构图可知,该系统大致可以分为三个部分:目标模型,鱼雷模型以及观察模块。
1.根据目标模型和鱼雷模型的数学方程组,调用Simulink 工具箱模块库中的所需模块建立目标模型和鱼雷模型。
2.根据系统结构框图完成整个系统仿真模型的搭建,如图6 所示。
3.设置各模块的参数,并按照题目给定的初值条件设置好各模块的初值。
4.设置仿真器的参数,这里选择起始时间为0s ,终止时间为100s ,变步长解法器ode45,最大步长为0.05,最小步长自动调整。
5.对已经建立好的系统仿真模型进行运行调试,并对仿真结果进行分析。
图6 系统仿真模型结构图
图7 目标的弹道曲线
图8 鱼雷追踪曲线为了绘制绘制鱼雷跟踪弹道曲线,运行以下程序代码:plot(xe,ze)
hold on
plot(xt,zt)
图9 鱼雷跟踪弹道曲线
实验结果分析
由上图可以发现利用Simulink 建立系统仿真模型可以实现鱼雷跟踪目标的功能,达到了预期的目的,验证了实验的正确性。
与此同时,由图9可以发现鱼雷跟踪目标后还会继续运行,与实际情况并不相符,为了更好的绘制绘制鱼雷跟踪弹道曲线,仿真结构图中结合了stop 模块用来使终端脱靶量即终端时刻所对应的最小距离22tf r x z =∆+∆以给出仿真结束的时间停止仿真。
通过反复的调试,观测工作空间tf r 的值发现终端脱靶量不可能为零,最小为3.3左右。
将tf r 设置为小于等于3.3时绘制的鱼雷跟踪目标弹道曲线如图10所示。
可见数学模型并不能完全深刻的描述出物理模型,所以仿真结果也与实际鱼雷弹道并不完全吻合,但作为一个仿真软件,在其精度允许范围内并不影响其仿真效果和实验的有效性和正确性。
图10 鱼雷跟踪弹道曲线。