利用最优输出反馈的鲁棒调节器设计方法
状态反馈鲁棒输出调节器的另一种证明
Ano h r Pr o f t e Ro u tS a e Fe db c t e o f o h b s t t — e a k Out tRe ul t r pu g a o
维普资讯
第 l 9卷 第 1期 20 0 7年 3月
甘肃 科 学 学 报
J ur a fGa s ce c s o n lo n u S ・n e i
Vo . 9 1 1 No 1 .
M a" 2 0 t 0 7 .
状 态 反 馈 鲁 棒 输 出调 节 器 的 另一 种 证 明
对 这 一 问题 的处 理 , 明过 程 同 时也 提 供 了调 节器 证 的构 造方法 .
究 _ . 献 [ ] 一 类 比较 特 殊 系统 ( 1 文  ̄ 3对 出入 和 干 扰
不 直接 影 响输 出 ) 出 了存 在状 态 反馈 鲁棒 输 出调 给
节 器 的充 要条 件及 其构 造. 献 [] 文 5 中对一 般 系统给
合这 些文献 所 给出 的主要 结果 和一些 基本 的矩 阵理 论 , 简化 不 同综合 方 式 下鲁 棒 输 出调 节 器 可解性 对
的证 明是 可 能 的. 文献 [ 0 给 出 了存 在输 出反馈 鲁 1] 棒 调节 器 的一 个 简单 证 明. 我们 在 此 基础 上 给 出存
在 状态 反 馈鲁 棒调 节 器 的一 个 证 明 , 明过 程清 晰 证 而简单 , 只涉及 到 一些 简单 的矩 阵运算 , 因而 简化 了
徐 国平 ,李 炜 ,乔 平 原
最优控制问题的输出反馈设计
最优控制问题的输出反馈设计最优控制是一种优化技术,旨在使系统的性能指标达到最佳。
在实际应用中,输出反馈设计是最优控制方法中的一种重要手段。
本文将介绍最优控制问题的输出反馈设计,并探讨其在不同领域中的应用。
一、最优控制问题简介最优控制问题是一种数学优化问题,通过选择合适的控制输入,使系统的性能指标达到最优。
最优控制问题的基本目标是在给定约束条件下,使性能指标(如系统响应速度、能耗、误差等)最小化或最大化。
二、输出反馈设计的概念输出反馈设计是一种最优控制方法,其基本思想是通过测量系统的输出,根据监测到的信息得到合适的控制输入,以实现系统的性能指标最优化。
输出反馈设计可以有效地解决系统中的不确定性和非线性问题,并提高系统的鲁棒性和稳定性。
三、输出反馈设计的数学模型输出反馈设计的数学模型主要包括系统微分方程、状态空间表示和性能指标的定义。
在最优控制问题中,为了使系统的性能指标最优,需要确定合适的状态量选择和输出反馈增益。
四、最优控制问题的输出反馈设计方法最优控制问题的输出反馈设计方法主要包括线性二次型调节、H∞优化及模态控制等。
其中,线性二次型调节是最常用的一种方法,通过求解Riccati方程可以得到最优输出反馈增益。
五、输出反馈设计在自动控制中的应用输出反馈设计在自动控制中得到广泛应用。
例如,在飞行器控制中,输出反馈设计可以通过测量飞行器的位置和速度,得到合适的控制输入,以实现飞行器的稳定性和精确性。
在机器人控制中,输出反馈设计可以通过测量机器人的姿态和位置,实现机器人的导航和避障。
在工业过程控制中,输出反馈设计可以通过测量工艺参数,实现生产过程的优化和控制。
六、输出反馈设计的优势和挑战输出反馈设计具有很多优势,如能够有效地处理非线性和不确定性,提高系统的鲁棒性和稳定性。
然而,输出反馈设计也面临一些挑战,如系统模型不准确、传感器噪声和延迟等。
七、结论最优控制问题的输出反馈设计是一种重要的优化技术,能够使系统的性能指标达到最佳。
基于改进LMI的鲁棒H∞动态输出反馈控制综合
基于改进LMI的鲁棒H∞动态输出反馈控制综合郝峰;叶思隽;车晓涛【摘要】研究动态输出反馈(DOF)下连续时间系统的鲁棒H∞控制综合问题.借助于线性矩阵不等式(LMI)技术,给出了闭环系统鲁棒H∞DOF控制器存在的充要条件.该条件依赖于引入的松弛变量,消除了Lya-punov变量与系统矩阵之间的耦合,能够减小控制器设计的保守性.利用变量替换方法,将上述条件中的非线性矩阵不等式转化为关于替换变量的LMI,并给出了相应的DOF控制器求解方法.数值算例结果验证了新方法的有效性.【期刊名称】《弹箭与制导学报》【年(卷),期】2017(037)002【总页数】6页(P5-10)【关键词】控制理论;鲁棒控制;动态输出反馈;线性矩阵不等式;H∞控制【作者】郝峰;叶思隽;车晓涛【作者单位】西北工业大学航天学院,西安710072;中国兵器工业第203研究所,西安710065;中国兵器工业第203研究所,西安710065;中国兵器工业第203研究所,西安710065【正文语种】中文【中图分类】TP1320世纪90年代以来,随着内点法的应用和MATLAB LMI工具箱的推出,LMI方法被广泛应用于控制领域[1-2],成为控制分析与综合最有效的工具之一。
H∞控制是鲁棒控制理论中最为重要的设计框架之一。
传统的H∞范数计算问题都可以通过有界实引理转化为标准的LMI表达式。
但是,在多目标或多通道控制分析与综合时,矩阵表达式中的系统矩阵和Lyapunov变量之间的耦合导致问题非凸,难以求解。
常见的解决办法是针对所有的约束条件使用相同的Lyapunov函数[2],这使得控制器的保守性大大增加。
近年来,通过在矩阵表达式中引入松弛变量,能够实现系统矩阵和Lyapunov变量之间的解耦,减小设计保守性。
M.C.Oliveira和J.Geromel在这方面做出了开创性的研究工作[3],获得了基于参数依赖Lyapunov函数的不确定离散时间系统的鲁棒稳定条件。
基于输出反馈的鲁棒控制器优化设计及仿真
AB STRACT : e m eho o ptma pp o i ain,whc s a le opoe p a e e t sus d i o us o to lr Th t d fo i la r xm to ih i pp id t l l c m n ,i e n r b tc n rle
t e ePo l lo t m o g tt ututf e a k m arx.Theme h d p o os d,whc a klst e p o lm fpoe h n us wela g r h t e heo p e db c t i i to rp e ih t c e h r b e o l plc me nd i r v y tm o u tpe o ma c l ,i a y t e lz nd c n b ppi d wi ey.The n a e nta mp o e s se r b s r r n e wel se s o r aie a a e a le d l f ume c i l r a ea x mpl fh drf i l n iu na moi n o to y tm ilsr ts t e a lc b l y a h e om a c ft e p o e o y ool o gt di l to c nr ls se lu tae h pp ia ii nd te p r r n e o h r ・ t f
d sg e in.T i p p r a d o u ti d x it u c in t a a u e h r c s n o ie v l e s in n ,a d h s a e d s a r b s n e n o a f n t h tme s r s t e p e ii fe g n a u s a sg me t n o o
最优控制问题的鲁棒性分析

最优控制问题的鲁棒性分析最优控制问题一直以来都是控制理论研究中的重要方向。
在实际应用中,由于存在各种不确定性因素,控制系统的鲁棒性分析变得尤为关键。
本文将就最优控制问题的鲁棒性进行分析,探讨常见的鲁棒控制设计方法,并探讨其优劣势。
1. 引言最优控制问题旨在找到满足给定性能指标的最优控制器,使得系统在约束条件下达到最佳性能。
然而,在实际应用中,控制系统通常受到各种不确定性的干扰,如参数变化、外部扰动等,这些因素可能导致控制系统性能下降甚至失效。
因此,研究最优控制问题的鲁棒性,即控制器对系统的鲁棒性能,对于实际应用具有重要意义。
2. 最优控制问题的建模最优控制问题通常可以通过数学建模进行求解。
常见的建模方法包括最小二乘法、动态规划、线性二次型控制等。
在建模过程中,需要准确地描述系统的动态特性和性能指标,以便得到准确的最优控制器设计。
3. 鲁棒控制设计方法为了提高控制系统的鲁棒性,研究人员提出了许多鲁棒控制设计方法。
常见的方法包括H∞控制、μ合成控制、鲁棒最小二乘法等。
这些方法各有特点,旨在通过优化控制器的设计,使系统对于各种不确定性因素具有较好的适应性。
3.1 H∞控制H∞控制是一种基于无穷范数的优化方法,主要用于线性系统的鲁棒性设计。
它通过优化系统的输出反馈控制器,使系统对于所有可能的不确定性因素都具有较好的鲁棒性。
H∞控制方法在理论上具有较好的性能保证,但在实际应用中往往需要较高的计算复杂度。
3.2 μ合成控制μ合成控制是一种基于复杂变量的优化方法,可以用于非线性系统的鲁棒性设计。
它通过优化控制器的频域响应特性,使系统对于不确定性因素具有较好的鲁棒性。
μ合成控制方法在非线性系统的鲁棒性设计上具有较好的适用性,但在实际应用中需要较为复杂的数学运算。
3.3 鲁棒最小二乘法鲁棒最小二乘法是一种基于统计学的优化方法,主要用于控制系统中存在参数不确定性的情况。
它通过优化系统的参数估计方法,使系统对于参数变化具有较好的鲁棒性。
一类多不确定性系统鲁棒H∞控制器的LMI设计方法
一类多不确定性系统鲁棒H∞控制器的LMI设计方法
胡中骥;施颂椒;翁正新
【期刊名称】《自动化学报》
【年(卷),期】2002(028)002
【摘要】对同时具有加型参数不确定性以及积分二次约束(IQC,integral quadratic constraint)不确定性环节的一类线性系统,给出设计其鲁棒H∞状态反馈控制器和动态输出反馈降阶控制器的设计方法. 在具体推导过程中,首先基于动态耗散理论,考虑了无输入情况下系统只具不确定性闭环环节时的鲁棒H∞稳定性问题. 然后基于这一条件,针对典型的无源类和有限增益类不确定性,推出了系统同时具有多不确定性时进行鲁棒H∞状态反馈控制器和动态输出反馈降阶控制器设计的充分条件. 所有可解条件都可化为标准的LMI(linear matrix inequality)求解.【总页数】9页(P192-200)
【作者】胡中骥;施颂椒;翁正新
【作者单位】上海交通大学自动化系,上海,200030;上海交通大学自动化系,上海,200030;上海交通大学自动化系,上海,200030
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于状态观测器的一类不确定性线性系统鲁棒保性能控制器设计 [J], 韦俊青;金朝永;刘瑾
2.基于LMI的不确定性无尾飞行器鲁棒变增益控制器设计 [J], 李文强;马建军;郑志强
3.一类不确定性时滞奇异系统鲁棒H∞控制器的设计 [J], 李文姿;吴保卫
4.基于LMI的一类非线性不确定状态及输入时滞系统的鲁棒H∞控制器设计 [J], 王淼鑫;王德进;宫兵
5.一类不确定性系统鲁棒H_∞控制器 [J], 付文
因版权原因,仅展示原文概要,查看原文内容请购买。
控制系统中的鲁棒控制方法与稳定性分析原理研究

控制系统中的鲁棒控制方法与稳定性分析原理研究鲁棒控制方法和稳定性分析原理是控制系统中重要的研究内容。
鲁棒控制是一种能够保证系统稳定性和性能的控制方法。
稳定性分析原理是对控制系统稳定性进行分析和评估的理论基础。
本文将针对控制系统中的鲁棒控制方法和稳定性分析原理展开研究。
一、鲁棒控制方法鲁棒控制是一种能够在控制系统参数变化和外界扰动的情况下,保持系统稳定性和性能的控制方法。
它通过设计控制器来满足系统鲁棒性的要求。
常见的鲁棒控制方法包括H∞控制、μ合成控制和静态输出反馈控制等。
1. H∞控制H∞控制是一种鲁棒控制方法,其目标是使系统对参数变化和扰动具有最大的容忍度。
通过最小化系统的灵敏度函数,设计出具有鲁棒性能的控制器。
H∞控制方法广泛应用于工业控制系统中,并取得了很好的效果。
2. μ合成控制μ合成控制是一种基于频率域分析的鲁棒控制方法。
通过设计控制器的增益和相位裕度,保证系统对参数变化和扰动的鲁棒性能。
μ合成控制方法不仅考虑系统的稳定性,还兼顾系统的性能指标,具有较高的实用性和鲁棒性能。
3. 静态输出反馈控制静态输出反馈控制是一种简化的鲁棒控制方法。
它通过直接测量系统输出信号,计算控制器的增益矩阵,并实现系统的稳定性和性能控制。
静态输出反馈控制方法具有简单易行、结构简单的特点,在一些实际应用中得到了广泛应用。
二、稳定性分析原理稳定性分析原理是对控制系统稳定性进行分析和评估的理论基础。
通过对系统的状态空间方程、传递函数以及特征根进行分析,可以判断系统的稳定性。
常见的稳定性分析原理包括根轨迹法、Nyquist准则和李雅普诺夫稳定性判据等。
1. 根轨迹法根轨迹法是一种基于特征根分析的稳定性分析方法。
通过绘制系统传递函数的根轨迹,可以对系统的稳定性进行分析。
当根轨迹位于单位圆内部时,系统为稳定系统;当根轨迹经过单位圆时,系统为边界稳定系统;当根轨迹位于单位圆外部时,系统为不稳定系统。
2. Nyquist准则Nyquist准则是一种基于频率响应分析的稳定性分析方法。
控制系统中的鲁棒性分析与控制策略设计研究

控制系统中的鲁棒性分析与控制策略设计研究控制系统,是指对一个系统的输出或状态进行调节,以实现预期输入值或状态的一种技术手段。
在该技术中,鲁棒性(Robustness)是一个十分重要的概念。
其指的是在各种干扰和不确定性因素的影响下,系统应当保持良好的性能表现。
因此,控制系统中鲁棒性分析与控制策略设计的研究就成为了十分热门的领域之一。
一、控制系统的鲁棒性分析1. 鲁棒性分析的概念在控制系统中,鲁棒性是系统在不确定性的干扰下,维持优良性能的能力。
它用来描述任何控制系统都需具有的普遍属性,如抗扰性和确定性。
在控制系统中,鲁棒性分析是指寻找并描述系统在各种不确定性信息下的反应和表现。
2. 鲁棒性分析的方法控制系统的鲁棒性分析方法包括:稳定性分析、性能分析和设计分析。
稳定性分析通过将控制器的采样间隔和控制系统的模型一起考虑,给出控制器选择的要求。
通过分析控制器的输入-输出关系,稳定性分析能够求得系统的稳定性界。
性能分析是一种基于功率或能源函数的分析方法,包括各种性能指标,如能耗和调节时间等。
通过考虑系统在带有各种干扰的情况下的表现,性能分析还可以提供对系统鲁棒性的关键特性刻画。
设计分析方法是鲁棒性分析中应用得最广泛的方法。
可以从控制器的设计策略以及控制系统的性质之间建立联系,以研究控制器设计对控制系统稳定性、性能和鲁棒性的影响。
二、控制策略设计在控制系统中,控制策略设计是实现优化系统性能的重要工具。
最近的研究表明,对于复杂系统,鲁棒性控制策略的使用相对于传统控制策略而言能够有效提高系统的鲁棒性能,从而实现较高的系统性能。
1. 鲁棒性反馈控制鲁棒性反馈控制指控制器将干扰输入作为重要设计参数,通过相应地调整控制器的输出,以优化系统的性能。
2. 鲁棒性前馈控制鲁棒性前馈控制器是一种可以补偿系统动态误差的控制器,它通过将干扰输入作为重要的控制参量,以补偿系统的动态误差,从而提高控制系统的鲁棒性能。
3. 综合鲁棒控制综合鲁棒控制是控制系统中最复杂的一种控制策略。
驱动电机负载模型Hinf(H无穷)鲁棒控制器设计
驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
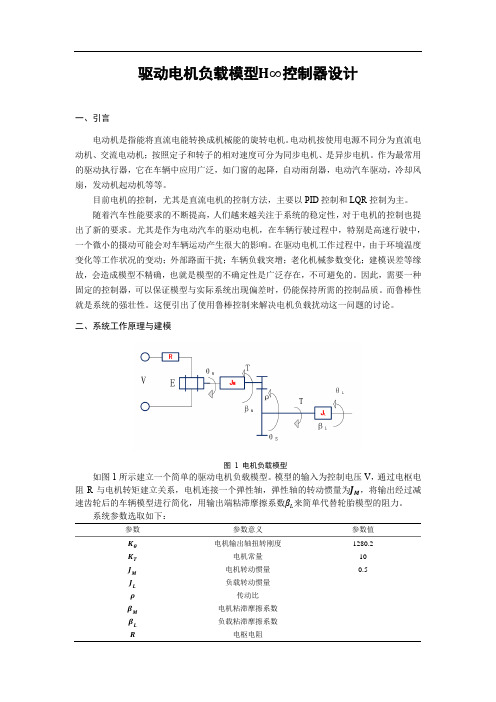
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
基于输出反馈控制系统的鲁棒容错控制设计
Rob tFa l— T o e a nt o sgn Ba e n us u t lr ntCo r lDe i s d o Out utFe d c nt o s e p e ba k Co r lSy t m
QIJ n,S u HEN n — r Do g i ,CHEN —j n,W ANG n — l g Yi u Lig i n
r s lsde e u t mons r t ha hem e h s ago d o s a tt e an o r a a lt t a e t tt t od ha o r bu tf ul olr tc ntolc p biiy.
Ke r s F u t t l r n o t o ;Ou p tf e b c y wo d : a l— o e a tc n r l t u e d a k;Ro u t b s ;Ti — d l y s s e ;Un e t i me ea y tm c ran
( c o l f I f r to n o to gie rn S h o n o ma ina d C nr lEn ne i g,Lio ig Un v riyo toe m & Ch mia c n lg o a nn ie st f Per lu e c lTeh oo y,
实际控制系统中有一系列的执行器和传感器 , 这些执行器或传感器的失效可能会导致严重的后果 。控 制系统在一些执行器或传感器发生故障时, 利用余下的部件仍能保持渐近稳定 , 即系统具有完整性。完整 性是容错控制研究的一个重要方面。近年来, 关于完整性设计方面的成果很多 , 但大多采用状态反馈控制方 法, 例如文献 [ ] 1 采用带有时滞项的状态反馈控制律 , 设计时滞线性系统 的鲁棒容错控制器。但实际系统的 状态往往不是全部可 以测得 , 因此, 用状态反馈控制的方法在应用上受到 限制 。由于系统中参数不确定 】 性的广泛存在以及传感器 、 执行器发生故障的不可避免性, 必须同时考虑这些因素对系统控制带来的影响, 鲁棒容错控 制 问题 的研究 具有 实际 意义 。时滞 是实 际 系统 中经常 出 现 的 , 因此 , 不确 定 时滞 系 统 【是 更 接 3 近于实 际系统 的模 型 J 。总之 以参 数不确 定性时滞 系统为对 象 , 采用 带有 时滞项 的输 出反馈 控制律 [ , 6 针 ] 对执行器故障 、 传感器故障和两类故障同时存在的情况 , 探讨 了参数不确定 时滞系统的鲁棒容错控制问题。 仿真效果 良 , 好 从而说明该方法不仅具有理论意义 , 也有实际意义。
不确定线性离散切换系统带有状态重置的输出反馈鲁棒l2-l∞控制器设计
10 0 0—56 (0 8 0 0 7 0 2 9 2 0 )6— 58— 6
不确 定 线 性 离散 切 换 系统 带 有 状 态 重 置 的 输 出反馈 鲁棒 一1 。 制 器 设计 。控
马衙 宇 , 赵旭东
( 哈尔滨工业 大学空间控制 与惯性技术研究中心 , 哈尔滨 10 0 ) 5 0 1
A s at R b sf —1 up t d akcnrl rbe vsg t r l s fier n et n b t c : out2 o tu  ̄eb c ot ol i i et a df ca na cr i r op m sn i e o t u d a k c n r l rva s t r s t s e in d, o rc n ev t e a d s f ce t o d t n i up t Ne b c o t l i t e e e sg e a lwe o s r ai n u in n i o n o e a id v i c i
s i h n .F n l ,a n me ia x mp e s o h e sbl y o e d sg e o t l r a d i u t ts w t ig i a l c y u r le a l h wst e fa i i t ft e in d c n r l n l sr e c i h o e l l a
设计引起了学者们的广泛关注与极大兴趣 , 并取得了大量成果: [ ] 3 研究 了切换系统 的稳定性与镇 文 2 []
多频未知时变扰动下的结构微振动鲁棒自适应控制
第 36 卷第 5 期2023 年10 月振 动 工 程 学 报Journal of Vibration EngineeringVol. 36 No. 5Oct. 2023多频未知时变扰动下的结构微振动鲁棒自适应控制方昱斌1,朱晓锦2,杨龙飞1,许志超1,田梦楚1,张小兵3(1.南京理工大学智能制造学院,江苏南京 210094; 2.上海大学机电工程及自动化学院,上海 200072;3.南京理工大学能源与动力工程学院,江苏南京 210094)摘要: 本文针对多频窄带未知和时变扰动,基于内模原理和Y⁃K参数化方法,提出一种反馈鲁棒自适应振动的主动控制算法。
该算法通过设计PID中央鲁棒控制器,有效解决了次级通道模型未知情况下的鲁棒控制器参数设计问题。
同时提出一种变步长最小均方(Variable Step Size Least Mean Square,VSSLMS)方法,可以在保证稳态误差的基础上大幅提升收敛速度,并通过系统辨识实验验证了所提VSSLMS方法相较于其他VSSLMS算法在收敛性能上的优越性。
通过结构微振动主动控制实时实验,对比验证了单独采用滤波x最小均方(Least Mean Square,LMS)自适应控制算法、基于LMS算法的鲁棒自适应控制算法和基于VSSLMS算法的鲁棒自适应控制算法的抑振效果。
实验结果表明,本文基于VSSLMS算法的鲁棒自适应控制算法在面向双频正弦窄带扰动以及其频谱、幅值突变情况时,都具有较好的收敛性和鲁棒性。
关键词:振动主动控制;Y⁃K参数化;变步长(VSS); LMS算法;鲁棒自适应中图分类号: TB535;O327 文献标志码: A 文章编号: 1004-4523(2023)05-1309-09DOI:10.16385/ki.issn.1004-4523.2023.05.015引言在高分遥感探测领域中,卫星结构微振动会引发空间相机产生视线抖动和像移,继而降低成像质量和分辨率,其影响不能忽视[1⁃2]。
鲁棒控制理论与方法
鲁棒控制理论与方法鲁棒控制是现代控制理论中的一个重要分支,它致力于设计出对系统参数变化、外部扰动和建模误差具有鲁棒性的控制器,以保证系统在不确定性环境下的稳定性和性能。
本文将介绍鲁棒控制的基本理论和常用方法,以及其在工业控制、机器人控制等领域中的应用。
一、鲁棒控制基础理论鲁棒性是指控制系统对不确定性的一种抵抗能力,它可以通过针对系统模型的不确定性建立数学模型,以保证系统稳定性和性能。
鲁棒控制的基础理论包括:1. H∞ 控制理论:H∞ 控制是一种用于处理线性时不变系统鲁棒控制问题的数学工具。
该方法通过定义一个性能指标,以最小化系统输出的最坏情况下的波动来设计控制器。
2. μ合成控制理论:μ合成是一种基于描述函数的鲁棒控制方法,它将系统不确定性建模为复杂函数,并通过求解非线性最优化问题来设计控制器。
3. 鲁棒控制的小参数理论:该理论主要研究在参数扰动很小时,系统性能的鲁棒稳定性和鲁棒性问题。
二、常用的鲁棒控制方法鲁棒控制方法多种多样,下面列举几种常用的方法:1. H∞ 控制方法:H∞ 控制方法通过在系统输出和控制器输入之间引入鲁棒性加权函数来设计鲁棒控制器。
该方法适用于线性时不变系统和线性时变系统。
2. μ合成控制方法:μ合成控制方法通过优化复杂描述函数来设计鲁棒控制器。
该方法适用于线性和非线性系统,并且具有较强的泛化能力。
3. 自适应控制方法:自适应控制方法将未知参数作为反馈调整的对象,通过在线估计参数的方式设计鲁棒控制器。
该方法适用于需要适应不确定性参数的系统。
4. 鲁棒滑模控制方法:鲁棒滑模控制方法通过引入滑模面的概念,以实现对系统模型误差和扰动的高度鲁棒性。
该方法适用于非线性和时变系统。
三、鲁棒控制在工业与机器人控制中的应用鲁棒控制在工业控制和机器人控制领域具有广泛的应用,以下列举几个实际应用案例:1. 工业过程控制:鲁棒控制可以用于工业过程中对温度、压力、流量等参数的控制。
通过对系统模型的不确定性建模和鲁棒控制器的设计,可以保证工业过程的稳定性和性能。
基于LQR的电液比例溢流加载系统PID控制器设计
基于LQR的电液比例溢流加载系统PID控制器设计候帅;雷晓顺;王柯;朱飞鸿;秦璇;王杨芬;孟凡虎【摘要】针对电液比例溢流加载系统,建立电液比例溢流加载系统的数学模型.发现文献介绍的输出反馈PID控制系统的控制效果不理想,主要原因是系统的高阶次和多变量.采用基于状态空间设计法的LQR最优调节器,较好地兼顾了系统的鲁棒稳定性和快速性,最后利用MATLAB软件分析传统PID控制和优化后系统的动态特性,并且证明了该方法的可行性.【期刊名称】《流体传动与控制》【年(卷),期】2016(000)004【总页数】3页(P10-12)【关键词】电液比例溢流阀;加载系统;PID控制;LQR调节器【作者】候帅;雷晓顺;王柯;朱飞鸿;秦璇;王杨芬;孟凡虎【作者单位】长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064;长安大学工程机械学院陕西西安 710064【正文语种】中文【中图分类】TH137随着电液比例控制技术的成熟,电液比例溢流加载系统在工程机械上得到了广泛的应用。
但是传统的PID控制策略主要是针对线性定常系统,很难达到快速性和稳定性之间的平衡,而且工程机械大多数工况非常复杂、载荷多变,传统的PID控制就不能满足要求了。
为了满足对系统性能的要求,必须提高系统在加载过程中的动态性能和工作可靠性,为此,可以用最优二次型理论对其进行优化。
图1为一种电液比例溢流加载系统的原理图。
它主要由比例溢流阀BYA7、定量泵P5、加载元件DS1、智能扭矩转速仪JCZ、智能扭矩转速仪电机M8等组成。
在此系统中,比例溢流阀BYA7与加载元件DS1的出口相连接,加载系统为液压马达加载。
工控机生成控制信号,经过比例放大器转换为电流信号并输入到比例电磁铁中,使阀的开启压力变化,从而改变了加载元件DS1的出口压力,使输出轴上的扭矩产生了改变,实现了对液压马达的加载。
基于干扰观测器和最优LQR的电液压系统的复合控制研究

2014年第10期液压与气动 77doi :10.11832“.is sn .1000—4858.2014.10.018基于干扰观测器和最优LQR 的电 液压系统的复合控制研究吴常红(吉林铁道职业技术学院汽车工程系,吉林吉林132100)摘要:随着电液压系统在自动控制领域的广泛应用,复杂工艺环境对其性能的要求也越来越高,但是 模型不确定性和负载力矩干扰的存在阻碍了系统性能的进一步提升。
针对干扰观测器(Dist urbanc e Observ . er ,DOB)在提高控制系统鲁棒性方面的优势,以及复合控制器在改善伺服系统跟踪性能方面的能力,提出了 一种双环控制结构,即内环DO B 与外环复合控制器相结合的方式。
同时,在构造外环复合控制器时,采用状 态空间设计的方法,并借助于最优LQR 理论。
计算机仿真结果表明,相比传统控制方案,所提出的双环控制 方案可实现电液压系统更精确的位置跟踪以及针对建模误差和负载力矩干扰的更强鲁棒性。
此外,该研究 控制方案的结构较为简单,易于工程实现。
关键词:电液压;干扰观测器;复合控制;LQR ;鲁棒性中图分类号:THl37;吼73 文献标志码:B文章编号:10004858(2014)10旬077旬5Compound Control of E lec tro —hy drau lic Sy ste m Bas ed onDis tur ba nce O bs enr er a nd O pti ma l LQRW U Chang —hong(Dep aT tme nt 0f Aut omoti ve Engineering ,Jilin Rail w 町Vo ca li on al 明d 1kllIIolo 盱College ,Ji hn ,Jil in l32100)Abs 晌ct : Wi山that electro —hy drau lic s yste ms a r e more and more widely used inmany automa tic c ontm la r ea s ,more and mor e h 培h ped .o 珊ances of tllem ar e required for complicated process environment ,however tI l eimprov e — ment of s ys t e m perfb 咖ancesis restrictedby model uncenainties and loading mom e n t dis t山.ballces . Bec au se the dis — turbance obsenrer(DOB) possesses 出 e advaIltage in enhar Ici ng tlle mbustnes s ofcontIDl system , and the com — pound controller has tIIe abilit)r of impr0Ving theⅡacking ped-omance of se n r o syst em ,onecontrol scheme with a 眦。
控制基础试题及答案

控制基础试题及答案1. 什么是控制系统?请简述其基本组成。
答:控制系统是指能够使被控制对象的输出按照预定规律变化或保持在某个状态的系统。
其基本组成包括控制器、执行器、被控对象和反馈环节。
2. 闭环控制系统与开环控制系统的主要区别是什么?答:闭环控制系统具有反馈环节,能够根据输出与期望值之间的偏差进行调节,而开环控制系统没有反馈环节,不能根据输出结果调整控制作用。
3. 简述比例(P)、积分(I)、微分(D)控制规律的特点。
答:比例控制规律对偏差的响应成比例,但无法消除稳态误差;积分控制规律能够消除稳态误差,但响应速度慢;微分控制规律对快速变化的偏差响应快,但对噪声敏感。
4. 什么是系统的稳定性?如何判断系统的稳定性?答:系统的稳定性是指系统在受到扰动后能够返回到平衡状态的能力。
可以通过分析系统的特征方程或使用劳斯-赫尔维茨判据来判断系统的稳定性。
5. 请解释什么是系统的超调量和上升时间,并说明它们对系统性能的影响。
答:超调量是指系统响应超过最终稳态值的最大值与稳态值之差的比例,上升时间是指系统响应从10%到90%所需的时间。
超调量过大会导致系统过冲,影响稳定性;上升时间过长则会导致系统响应速度慢,影响快速性。
6. 什么是系统的频率响应?它在控制系统设计中有何作用?答:系统的频率响应是指系统对不同频率正弦输入信号的稳态响应。
它在控制系统设计中用于分析系统的稳定性、性能和鲁棒性,是设计控制器的重要工具。
7. 简述PID控制器的设计方法。
答:PID控制器的设计方法包括经验法、极点配置法和根轨迹法等。
经验法主要依靠试错调整参数;极点配置法通过选择适当的极点位置来设计控制器;根轨迹法则是通过分析根轨迹图来调整控制器参数。
8. 什么是系统的鲁棒性?如何提高系统的鲁棒性?答:系统的鲁棒性是指系统在面对参数变化和外部扰动时,仍能保持性能不变的能力。
提高系统的鲁棒性可以通过增加冗余、使用鲁棒控制算法或设计鲁棒控制器等方法实现。
直流电动机的鲁棒控制设计
直流电动机的鲁棒控制设计直流电动机的鲁棒控制设计直流电动机的鲁棒控制设计一、引言直流电动机在整个电力拖动应用中,占有十分重要的地位。
相对于交流电动机,直流电动机的调速性能更为优越,在大范围、高精度调速要求的应用中,成为首选。
因此,研究直流电动机的调速具有十分重要的意义。
由于电机的参数和模型受到其应用环境的影响,常规的 PID控制在电机参数发生变化的时候,将变得不可靠。
文中将鲁棒控制技术应用到电机调速系统中,可有效地避免电动机模型及外加载荷的变化对系统的影响,增加系统的可靠性。
文中设计了鲁棒控制器,给出了直流电动机的数学模型,并将设计的鲁棒控制器应用在直流电动机模型上,对其进行了计算机仿真实验,给出了仿真结果。
二、鲁棒控制器的设计 1、鲁棒控制鲁棒控制理论是在空间通过某些性能指标的无穷范数优化而获得具有鲁棒性能控制器的一种控制理论。
范数为矩阵函数在开右半平面的最大奇异值的上界,其物理意义是它代表系统获得的最大能量增益。
近年鲁棒控制方法得到迅速发展,特别是对模型具有不确定性及干扰能量为有限信号的系统,应用控制理论设计的控制器进行控制,使系统具有很强的鲁棒性。
2、系统的能控性和能观性研究能控性和能观性是控制器设计中比较基本的一步。
( 1)状态能控性状态能控性的含义是系统控制输入支配状态变量的能力。
状态能控性的定义:如果对任何初始状态任何时间,和任何最终状态,存在着一个输入使成立,则动态系统是状态可控。
反之,则系统的该状态不能控的。
若全体状态变量均满足要求,则称为系统是完全可控的。
能控性判据:系统可控的充分必要条件是的秩为 n, n是状态个数。
( 2)状态能观性状态能观性的含义是系统控制输出支配状态变量的能力。
状态能观的定义:如果对任何时刻,输入信号和在之间的输入,初始状态能被确定,则动态系统,是状态能观的。
反之,系统是状态不能观的。
若通过输出量的测量值确定所有状态变量,则系统是完全状态能观的。
状态能观判据:系统能观的充分必要条件是是满秩的,即秩为 n。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用最优输出反馈的鲁棒调节器设计方法的报告,800字
鲁棒调节器设计方法可以帮助系统减小对外部扰动的影响,并且在保持系统稳定性的同时提升系统的性能,从而实现系统的最优控制。
本文将介绍利用最优输出反馈的鲁棒调节器设计方法,详细介绍了其原理、步骤及应用。
1.原理
最优输出反馈的鲁棒调节器是一种用来提升系统稳定性及性能的方法,它是基于一种叫做“改进梯度下降”的优化算法来设计的,原理是利用每一时刻系统中反馈信号和环境信息来估算一阶微分信息,从而找到最佳控制量,从而使系统达到最优控制效果。
此外,最优输出反馈的鲁棒调节器能够考虑到实际系统中扰动的影响,从而实现稳定性最优的控制效果。
2.步骤
最优输出反馈的鲁棒调节器的设计方法包括三个步骤:首先,建立一个多输入多输出的系统模型;其次,利用改进梯度下降的优化算法来计算最优的控制量;最后,将计算得到的结果应用到实际系统中。
3.应用
最优输出反馈的鲁棒控制器设计方法已经广泛用于工业实际控制系统中,它可以有效减少带来的外部扰动的影响,提高系统的性能,同时保持系统的稳定性。
例如,它可以用来改善自动制造系统的准确性、抗扰动性以及可靠性等性能指标,从而实现最优控制效果。
综上所述,最优输出反馈的鲁棒调节器设计方法可以有效地提升系统的性能及稳定性,减少外部扰动的影响,提高系统的可靠性,实现最优控制效果。
因此,本文对最优输出反馈的鲁棒调节器设计方法作了简要介绍,并讨论了它的实际应用,为工业实际控制系统提供了有效的控制解决方案。