积分法求梁的位移
工程力学第2节 确定梁位移的积分法

例10-3 如图图示简支梁, l 4m ,弯曲刚度EI 1640N m2。在无限接近右支座 B 处受到矩为的集中 力偶 M e 120 N m 作用,试求 (1)转角方程和位移方 程;(2)梁的最大挠度。
解:(1)转角方程和 位移方程 x
Me FA FB l
梁的弯矩方程为
5
3
4
令 x 0,得B截面的挠度为
ql yB ( ) 30 EI
Me 2 x C (1) 将上式一次积分得转角 y' 2EIl
Me M ( x) x l
转角方程
Me 2 y' x C 2EIl
(1)
再次积分,可得挠度方程:
Me 3 y x Cx D (2) 6EIl 边界条件: x 0 时,y0 0 ; x l 时,yl 0 M el D0 C 6EI M e 2 M el 2 0 . 00915 x 0.0488 x 2EIl 6EI M e 3 M el 3 x 0.0488x y x x 0.00305 6EIl 6EI
再次积分,可得挠度方程:
1 1 1 3 4 y ( qlx qx ) Cx D EI 12 24
1 1 1 3 2 ( qlx qx ) C EI 4 6 1 1 1 3 4 y ( qlx qx ) Cx D EI 12 24 边界条件: x 0 时,y0 0 ; x l 时,yl 0
补充例 悬臂梁AB在三角形分布载荷作用下,跨 度为l,抗弯刚度为EI,如图所示。试求B截面的挠度。 解:与B截面距离为 x 的任一截面的载荷集度为
x q( x) q l
(0 x l )
用积分法求梁的变形
M ( x) EI Z
d 2 M ( x) 2 dx EI Z
d 2 M ( x) 2 dx EI Z
o
M
M
x
o
x
d2y 0 2 dx
y y
M
d2y 0 2 dx
M
d 2 M ( x) 2 dx EI Z
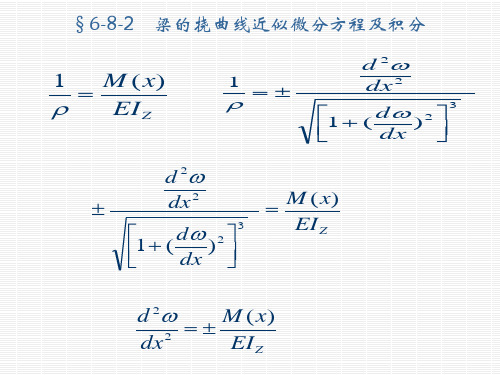
梁挠曲线近似微分方程
d 2 M ( x) 2 dx EI Z
x0
x0
L b 3
1 L 2
一般认为梁的最大挠度就发生在跨中
b0
3 L 0.577 L 3
例题 5.4
画出挠曲线大致形状。图中C为中间铰。
F
A
两根梁由中间铰连接,挠曲线在 中间铰处,挠度连续,但转角不 连续。
1 2
1 2
例题 5.5
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
y
A
C
B
x
C
B
tan
d dx
d dx
M ( x) EI Z dx C1
M ( x ) 在小变形情况下,任一截面的转角等于挠曲线 在该截面处的切线斜率。 dx dx C1 x C2 EI Z
通过积分求弯曲位移的特征: 1、适用于细长梁在线弹性范围内、小变形情况下的对称弯曲。
B
2M ( x ) d d Fx dx C C EI Fxdx EI C z 11 z 1 dx dx 2 EI Z
x
y
边界条件
2 3 Fx C xC Fx EI dx z 2 EI z 1 x C2 26 C1
建筑力学

二、变形体的虚功原理
1、外力虚功:外力在其他因素引起的位移上所做的功 外力虚功 称为外力虚功。 称为外力虚功。 P P2 1 P 和作用下在 P 作用点沿 P 1 1 1 A 方向产生的位移 记为 ∆11 P2 和作用下引起 P 作用点沿 1 P方向产生的位移 ∆12 ,同时 1 在 P2 作用点沿 P2 方向产生 的位移 ∆ 22 。
4.3 虚功原理 单位荷载法求梁的位移 一、实功与虚功
二、变形体的虚功原理
三、单位荷载法求梁的位移
四、图乘法求梁的位移
一、实功与虚功
1、实功:力由于自身所引起的位移而作功。 实功:力由于自身所引起的位移而作功。 作的功与其作用点移动路线的形状、路程的长短有关。 作的功与其作用点移动路线的形状、路程的长短有关。 P 1 当静力加载时, 当静力加载时,即 A P由0增加至 P由0增加至P 增加至P y1 ∆1 ∆1 由0增加至 ∆1 增加至
(a) 8kN/m
144 B 144
144
36 36
A D
24kN
(c) M P 图 (kN ⋅ m)
四、图乘法计算位移
(2)分别作荷载弯矩图和单位力的弯矩图。 分别作荷载弯矩图和单位力的弯矩图。
B
C
B
6
6
C
6
6m
A
D
P =1
A
D
8m
(b)
(d) M 图 (m)
四、图乘法计算位移
(3)进行图形相乘
∆ KP =
ω yC
EI
144 B 144 288
C
144
∆ DH = 1 [ 1 × 288 × 6 × 2 × 6 3 EI 2 3 1 − ×144 × 6 × × 6] 4 3 1 1 + [ ×144 × 8 ×6] 2EI 2 1 1728 (3456 − 1296) + = EI EI 3888 ( ) = EI
积分法计算梁的变形

积分法计算梁的变形
步骤:(EI为常量) 1、根据荷载分段列出弯矩方程 M(x)。 2、根据弯矩方程列出挠曲线的近似微分方程并进行积分
EIw(x) M (x)
EIw(x) M (x)dx C1 EIw (x) ( M (x)dx)dx C1x C2
积分法计算梁的变形
3、根据弯曲梁变形的边界条件和连续条件确
C1
C2
Fb 6L
(L2
b2 );
D1 D2 0
确定挠曲线和转角方程
w1
F b x1 6LEI
L2 b2 x12
w2
Fb 6LEI
L b
(x2
a)3
x23
(L2
b2
)x2
1
w1
Fb 6LEI
(L2 b2 ) 6x12
2
w2
Fb 2LEI
L b
(x2
a)2
x22
1 3
(L2
5、计算任意截面的挠度、转角;挠度的最大 值、转角的最大值。
例:求图示悬臂梁自由端的挠度及转角( EI=常数)。
w
x
L
F
x
解:建立坐标系并写出弯矩方程
M (x) F(L x)
写出微分方程并积分 EIw FL Fx
EIw
FLx
1 2
Fx
2
C1
EIw
FLx2 2
Fx3 6
C1x
C2
EIw
q
确定积分常数
x =0 , w=0 ; x=L , w=0 .
C1
ql3 24,C2 0A NhomakorabeaB
L
最大挠度及最大转角
确定挠曲线和转角方程 w qx (l3 2lx2 x3 )
材料力学第五章梁弯曲时的位移

工程实例
7-1
工程实例
工程实例
5-1 梁的位移——挠度及转角
建立坐标系,oxy为梁对称面,外力作用在对 称面内。所以,挠曲线为o xy面内的平面曲线。
挠度
y 向下为正。
y
x
y
转角
x
挠曲线
挠曲线方程:
7-2
w= f (x)
挠度
略去剪力的影响,则平面假设成立,发
y
5.2 积分法求梁的挠度和转角
例1 求梁的转角方程和挠度方程,并求最大转角和最大挠度, 梁的EI已知。
解 1)由梁的整体平衡分析可得:
2)写出x截面的弯矩方程
FAx 0, FAy F (), M A Fl (
)
A
x
l
yB
F B
B
x
M ( x ) F (l x ) F ( x l )
A
FAx 0, FAy
Fb Fa , FBy l l
2)弯矩方程
FAy x1
ymax
x2
FBy
AC 段:
M x1 FAy x1 Fb x1 ,0 x1 a l
y
a
b
CB 段:
Fb M x2 FAy x2 F ( x2 a ) x2 F ( x2 a ), l
目录
a x2 l
5.2 积分法求梁的挠度和转角
A d 2 w1 Fb EI M ( x1 ) x1 2 dx1 l FAy x1 dw1 Fb 2 EI EI ( x1 ) x1 C1 x2 dx1 2l Fb 3 a EIw1 x C1 x1 D1 6l a x2 l CB 段: y d 2 w2 Fb EI M ( x2 ) x2 F ( x2 a) 2 dx2 l dw Fb 2 F EI 2 EI ( x2 ) x 2 ( x2 a ) 2 C 2 dx2 2l 2 Fb 3 F EIw2 x 2 ( x2 a)3 C2 x2 D2 6l 6
材料力学 积分法求梁的变形
M ( x ) = r EI Z 1
1 = ± r d 2 w dx 2 d w é 2 ù 1 + ( ) ê ú dx ë û
3
±
d 2 w dx 2 d w 2 ù é 1 + ( ) ú ê dx û ë
3
M ( x ) = EI Z
边界条件、连续条件应用举例
弯矩图分三段,共6 个积分常数需6个边界条 件和连续条件 A B
P C D
w
铰连接
ω A点: A = 0, q A = 0
B 点 : w B 左 = w B 右
C点 : w C左 = w C右
D点:w D = 0
q C 左 = q C 右
边界条件、连续条件应用举例
y
边界条件
3 qL C1 = 6 EI z
EI zw =
1 (L - x )4 + C q 1 x + C 2 24
x = 0 x = 0 x = L
q = 0 w = 0
qL3 q B = 6 EI z
q =-
3 qL C2 =24 EI z
挠曲线方程应分两段AB,BC.
F A
a
q
B
EI z
L
共有四个积分常数
C
x
边界条件
x = a x = a + L
连续条件
w B = 0 wC = 0
y
x = a
w B1 = w B 2 q B1 = q B 2
例题 5.4 &
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
积分法是求解梁变形的基本方法
C
BC刚化C
l
C
F
F
F
a
B
A
B
wA A1
B Fa w3
A
B
1. AB弯曲(BC刚化) Fa 3
w A1 3EI () 2. BC扭转(AB刚化)
wA2
B
a
Fal GI p
a
Fa 2l GI p
3. BC弯曲(AB刚化)
Fl 3
wA3 wB 3EI
wA wA1 wA2 wA3 Fa2l Fl 3 Fa3
Page5
BUAA
MECHANICS OF MATERIALS
例2:E常数, I 2 2I1 ,求 wC , C
I2
I1
A B
刚化AB段:
A B
P
C
仅考虑BC段变形:
P C
C1
Pa 2 2EI1
Pa3 wC1 3EI1
BC段刚化:
M Pa
B
C
A
B
FP
仅考虑AB段变形:
C2 B B,F B,M
材料物质点应力状况·应力微体 材态
通过构件内一点,所作各微截面的 应力状况,称为该点处的应力状态
三、怎么研究应力状态
x
研究构件内的一点的应力状态时, z
通常是围绕该点取出一个微小立方体(简 称微体)作为研究对象
y
y y
d
x
x
d
y
x
d
x
z
y
Page18
BUAA
BUAA
MECHANICS OF MATERIALS
上讲回顾
挠曲轴的近似微分方程
d 2w M(x) dx2 = EI
知识资料材料力学(八)(新版)

弯曲变形粱的挠度与转角(一)挠曲线在外力作用下,梁的轴线由直线变为光洁的弹性曲线,梁弯曲后的轴线称为挠曲线。
在平面弯曲下,挠曲线为梁形心主惯性平面内的一条平面曲线v=f(x)(见图5-8-1)。
(二)挠度与转角梁弯曲变形后,梁的每一个横截面都要产生位移,它包括三部分:1. 挠度梁横截面形心在垂直于轴线方向的线位移,称为挠度,记作v。
沿梁轴各横截面挠度的变化规律,即为梁的挠曲线方程。
v=f(x)2.转角横截面相对本来位置绕中性轴所转过的角度,称为转角,记作θ。
小变形情况下,3.此外,横截面形心沿梁轴线方向的位移,小变形条件下可忽略不计。
(三)挠曲线近似微分方程在线弹性范围、小变形条件下,挠曲线近似微分方程为上式是在图5—8—l所示坐标系下建立的。
挠度w向下为正,转角θ顺时针转为正。
积分法计算梁的位移按照挠曲线近似微分方程(5—8—1),积分两次,即得梁的转角方程和挠度方程,即由第1 页/共6 页式中积分常数C、D,可由梁的边界条件来决定。
当梁的弯矩方程需分段列出时,挠曲线微分方程也需分段建立,分段积分。
于是全梁的积分常数数目将为分段数目的两倍。
为了决定所有积分常数,除利用边界条件外,还需利用分段处挠曲线的延续条件(在分界点处左、右两段梁的转角和挠度均应相等)。
用叠加法求梁的位移(一)叠加原理几个荷载同时作用下梁的任一截面的挠度或转角等于各个荷载单独作用下同一截面挠度或转角的总和。
(二)叠加原理的适用条件叠加原理仅适用于线性函数。
要求挠度、转角为梁上荷载的线性函数,必须满意: 1.材料为线弹性材料;2.梁的变形为小变形;3.结构几何线性。
(三)叠加法的特征1.各荷载同时作用下挠度、转角等于单独作用下挠度、转角的总和,应该是几何和,同一方向的几何和即为代数和。
2.梁在容易荷载作用下的挠度、转角应为已知或可查手册。
3.叠加法相宜于求梁某一指定截面的挠度和转角。
[例 5—8—1] 用积分法求图5—8—3所示各梁的挠曲线方程时,试问应分为几段?将浮上几个积分常数? 并写出各梁的边界条件和延续条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EIw1
Fb 6l
x3
C1x
DB段:
EIw2
Fb 2l
x2
Fx
2
a2
C2
EIw2
Fb 6l
x3
Fx
6
a3
C2x
D2
b) x l 时,w2 0
Fb 6l
l3
F l
6
a3
C2l
D2
0
AD段:
EIw1
Fb 2l
x2
C1
EIw1
Fb 6l
x3
C1x
DB段:
EIw2
Fb 2l
x2
Fx
2
a2
C2
第5章 梁弯曲时的位移 (Displacement)
§5-1 梁的位移—挠度及转角
q (转角)
A
B
x
C1 w(挠度)
y 挠度(Deflection): 向下为正
转角(Rotation) :顺时针为正 挠曲线方程: w=f(x)
转角方程: q tanq w f x
§7-2 梁的挠曲线近似微分方程及其积分
EIw M x
EIw M xd x C
EIw [ M xd x]d x Cx D
1. M(x)=0的区段,挠曲线为斜直线; 2. M(x)≠0的区段, 挠曲线为曲线; 3. M(x)>0的区段, 挠曲线为下凸; 4. M(x)<0的区段,挠曲线为上凸; 5. M(x)=0的截面,挠曲线出现反弯点;
纯弯曲时:
1M
EI
1
x
w 1 w2
3 2
因为在小变形情况下: 1 w2 1
M x w
EI
x
M
y
M>0 w″<0
x
M
y
M<0 w″>0
M x w
EI
M x w
EI
M x w
EI
挠曲线的近似微分方程: EIw M x
1. 将纯弯曲的公式 1 M 推广至横力弯曲
EI
2. 取w’0
x
Fb l
x
DB段:M2 x
Fb l
x
Fx
a
2)梁的挠曲线方程
AD段: EIw1
M1x
F
b l
x
DB段:EIw2
M 2 x
F
b l
x
Fx
a
3)积分
AD段:
EIw1
Fb 2l
x2
C1
EIw1
Fb 6l
x3
C1x
D1
DB段:
EIw2
Fb 2l
x2
F x a2
2
C2
EIw2
Fb 6l
x3
Fx
6
a3
C2x
l2 b2
x
2
Fbx
w1 6lEI
l2 b2
x2
DB段:q2
w2
Fb 2lEI
l b
x
a2
1 3
l2 b2
x
2
w2
Fb 6lEI
l b
x
a
3
l2
b2
x
x
3
A y
l/2 Ⅰ
qA
x1 a
F
C
DⅡ
wC
wmax
qB
b
B x
当载荷作用在梁的中点,即a=b=l/2时,其最大转 角和挠度为:
D2
AD段:
EIw1
Fb 2l
x2
C1
EIw1
Fb 6l
x3
C1x
D1
DB段:
EIw2
ቤተ መጻሕፍቲ ባይዱ
Fb 2l
x2
Fx
2
a2
C2
EIw2
Fb 6l
x3
Fx
6
a3
C2x
D2
4)确定积分常数
位移边界条件: a) x 0 时,w1 0
D1 0
EIw1
Fb 6l
x3
C1x
AD段:
EIw1
Fb 2l
x2
C1
EIw' q0 l x3 C
6
EIw q0 l x4 Cx q0l 4
24
24
2)x
0
处
w 0
q0
l3
C
0
6
C q0l3
6
w' 1 [ q0 l x3 q0l3 ]
EI 6
6
w 1 [ q0 l x4 q0l3 x q0l 4 ]
EI 24
6 24
w' 1 [ q0 l x3 q0l3 ]
EIw2
Fb 6l
x3
Fx
6
a3
C2x
D2
位移连续条件: a) x a 时,w1 w2
Fb 6l
a3
C1a
Fb 6l
a3
C2a
D2
C1a C2a D2
AD段:
EIw1
Fb 2l
x2
C1
EIw1
Fb 6l
x3
C1x
DB段:
EIw2
Fb 2l
x2
Fx
2
a2
C2
EIw2
Fb 6l
x3
Fx
EI 6
6
w 1 [ q0 l x4 q0l3 x q0l 4 ]
EI 24
6 24
当x=l时:
qmax
w'
xl
q0l 3 6EI
wmax
w'
xl
q0l 3 8EI
例:求图示弯曲刚度为EI的简支梁的挠曲线和转角
方程,并确定其最大挠度和最大转角。
x A
F
D
B
x
a
b
l y
解: 1)求弯矩方程
AD段:M1x
6
a3
C2x
D2
b) x a 时,w1' w2 '
Fb 2l
a2
C1
Fb 2l
a2
C2
C1 C2
D1 0
Fb 6l
l3
F l
6
a3
C2l
D2
0
C1a C2a D2 C1 C2
求得:C1
C2
Fb 6l
l2
b2
D1 D2 0
AD段: q1 w1
Fb 2lEI
1 3
M
y
M<0 w″<0
x
M
y
M>0 w″>0
M x w
EI
M x w
EI
EIw M x
EIw M xd x C EIw [ M xd x]d x Cx D
例:弯曲刚度为EI的悬臂梁如图,求梁的挠曲线方程
及其最大挠度wmax。
q
解: x截面处弯矩方程为:
0
A
x
l
y
Bx
M
x
1 2
q0
l
qmax
Fl 2 16 EI
wm a x
wC
Fl 3 48 EI
1. 关于分段的确定 原则:挠曲线微分方程发生了变化,均需分段。
2. 位移条件
边界条件:
w’=0,w=0
w=0
连续条件:
w1’= w2’ , w1= w2
w=Δ w1=w2
混合条件:
w1’= w2’ w1=0 w2=0
w1’= w2’ w1= Δ w2= Δ
x
2
梁的挠曲线方程:EIw M x q0 l x2
2
EIw
q0 2
l
x2
d
x
q0 6
l
x3
C
EIw [ q0 (l x)3 C]dx q0 l x4 Cx D
6
24
EIw' q0 l x3 C
6
EIw q0 l x4 Cx D
24
利用位移条件确定积分常数:
边界条件: 1)x 0 处 w 0 q0 l 4 D 0 24 D q0l 4 24