舵机机器人串口协议
17自由度仿真人形教育机器人控制系统设计

17自由度仿真人形教育机器人控制系统设计杨剑,黄泽鹏,吴昶华,李昆(华南理工大学广州学院,广州510800)图2上位机整体主要功能图上位机功能编号选择串口控制模块舵机控制模块数据操作模块串口检测后台数据计算界面数据整理数据校验连接通信动作编辑姿态检测延时设置角度控制速度控制基金项目:2019广东省大学生科技创新培育专项资金项目(pdjh2019b0638)摘要:设计了一款17自由度仿真人形教育机器人控制系统,通过UBT12HB 舵机总线半双工串口UART通信协议,采用定时器产生17路PWM驱动信号,控制机器人各种姿态下的舵机角度和速度。
该系统具有运动形态新颖、运动效果优异、操作反应灵敏、体态特征丰富等特点,可应用于机器人知识普及和教学。
关键词:17自由度;人形机器人;控制系统设计中图分类号:TP 242文献标志码:A文章编号:1002-2333(2020)04-0008-04Design of 17-DOF Simulation Humanoid Education Robot Control SystemYANG Jian,HUANG Zepeng,WU Changhua,LI Kun(Guangzhou College of South China University of Technology,Guangzhou 510800,China )Abstract:This paper designs a 17-DOF simulation humanoid educational robot control system.Through the UBT12HB servo bus half-duplex serial UART communication protocol,a timer is used to generate 17PWM drive signals to control the servo angle and speed in various attitudes of the robot.The system has the characteristics of novel motion form,excellent motion effect,sensitive operation response,rich body features,etc.,and can be applied to the popularization and teaching of robot knowledge.Keywords:17-DOF;humanoid robot;control system design0引言目前机器人应用主要面向制造业和娱乐行业,随着全国各地机器人大赛的举办和普及,各大、中、小学校越来越重视机器人教育与培训。
机器人的通讯协议

机器人的通讯协议《机器人通讯协议》一、前言为了实现机器人之间的有效通讯,确保机器人协作的高效性和准确性,本文档规定了一种机器人通讯协议。
该协议涵盖了机器人之间基本的消息格式、通讯方式和错误处理等方面,适用于各种类型的机器人。
二、消息格式1. 消息类型:分为请求、响应、通知三种类型。
2. 消息结构:每条消息由消息头和消息体组成。
(1)消息头:包含版本号、消息长度、消息类型、目标机器人ID等基本信息。
(2)消息体:根据消息类型,包含相应的内容。
例如,请求消息体中包含请求命令和参数,响应消息体中包含执行结果和状态码。
三、通讯方式1. 基于TCP/IP协议:采用可靠的传输控制协议(TCP)进行通讯,确保数据的完整性和准确性。
2. 基于主题的消息队列:机器人之间通过消息队列进行通讯,每个主题对应一个消息队列。
机器人订阅感兴趣的主题,发送消息时指定目标主题。
3. 定时心跳:机器人之间通过发送心跳包来维持连接,检测对方是否在线。
四、错误处理1. 校验错误:消息在传输过程中,若发现数据校验失败,则丢弃该消息,并重新发送。
2. 消息格式错误:接收方在解析消息时,若发现消息格式不符合协议要求,则返回错误响应,并终止通讯。
3. 命令错误:执行方在处理请求时,若发现请求命令不符合要求,则返回错误响应,并终止通讯。
4. 权限错误:接收方在处理请求时,若发现请求方无权限执行该操作,则返回错误响应,并终止通讯。
五、协议版本迭代本协议可根据需求进行版本迭代,每次迭代需遵循以下规则:1. 在原有协议基础上,增加新的消息类型、字段或功能。
2. 保持消息格式和通讯方式的兼容性,以便旧版本机器人能与新版本机器人进行通讯。
3. 在新版本协议中,保留旧版本协议的支持,以便实现向下兼容。
六、总结《机器人通讯协议》为机器人之间的通讯提供了统一的标准和规范,有助于提高机器人协作的效率和稳定性。
在使用本协议时,请注意遵循相关规定,确保机器人之间的安全、可靠通讯。
服务机器人通信协议说明文档
服务机器人通信协议说明文档1、概述服务机器人是定义设计为给餐厅,家庭,巡检,科研等应用场合的类人形服务机器人。
本文主要讲述机器人的控制过程中的协议指定。
本机器人控制部分主要有四个部分组成,一、机器人上的Android界面控制二、机器人远程控制端APP协议三、机器人内部图形化编程动作录制四、机器人外置传感器协议定制(后续)其中软件部分,主要包括机器人上的Android界面以及远程控制APP协议两个部分,本文主要对这两个部分的协议做一个概述。
注:机器人上的Android程序除了要完成与远程APP的通信握手和TCP连接之外,在机器人控制上只需要完成数据的转发即可,即,收到远程控制端APP发过来的命令,会自动通过串口发送出去。
在收到串口发送过来的数据的时候,也会自动的发送到远程控制端的APP上。
2、数据包格式所有的数据包分为数据头数,据内容,数据尾三部分组成,数据头的定义如下:数据尾的定义如下:其中,数据头为:0xff 0xaa 数据尾为0xff 0x55数据校验位尾数据内容的累加和校验。
设备序列号为设备的唯一标识(存储在设备内部):在此机器人的握手包中获取,获取之后所有的通信内容必须包含握手包之后的设备需要,否则无法控制机器人。
设备命令类型分为六大类,分别为应答式主机发送包,应答式数据应答包,发送式发送包,反馈式从机数据传输包,反馈应答式从机反馈包,反馈应答式主机应答包。
(应答式表示该命令为主机发送,从机收到主机发送命令之后必须应答。
发送式数据包表示主机发送数据包,从机收到数据包直接处理。
反馈式数据包表示从机主动反馈数据包,不需要主机回应。
反馈应答式数据包表示从机主动反馈数据,主机收到数据给出应答。
设备表示形式会在具体协议中给出范例。
数据长度为数据传输内容的数据长度值。
具体的数据包的格式件实际数据协议3、机器人端APP说明机器人端的APP最好做成开机自启动,开机之后自动进入软件界面。
软件启动之后自动进入软件界面,软件界面为一个笑脸,在笑脸界面,机器人需要主动开启UDP端口和串口:UDP:3456(用于和手机端控制软件通信)串口:TTY5,波特率:115200。
舵机连接方法

舵机连接方法舵机连接方法舵机是一种能够实现旋转和定位的电机,通常用于控制机器人、模型和其他自动化系统的运动。
在连接舵机时,需要注意正确的接线,以确保舵机能够正确地运行。
以下是一些常用的舵机连接方法和注意事项。
1.三线连接最常见的舵机连接方式是三线连接,通常称为PWM连接。
这种连接方式需要用到三根线,分别是电源线、地线和信号线。
电源线连接到舵机的正极,地线连接到舵机的负极,信号线则用于控制舵机的转动方向。
在Arduino等控制器上,信号线连接到数字引脚,并使用PWM进行控制。
2.四线连接另一种舵机连接方式是四线连接,包括电源线、地线、信号线和编码器反馈线。
编码器反馈线可以实现对舵机位置的反馈控制,通常用于需要精确定位的系统。
使用这种连接方式时,需要特别注意接线的正确性和编码器反馈线的接口。
3.串口连接一些舵机支持通过串行接口进行连接和控制。
这种连接方式需要使用特定的串口协议,对于初学者来说可能较为复杂。
但这种连接方式可以实现较高的精度和响应速度,适用于需要较为精细的运动控制。
连接注意事项正确的舵机连接不仅可以保证舵机的正常工作,还可以防止电路短路、舵机损坏等问题。
以下是一些连接注意事项:1.接触不良舵机连线必须牢固稳定,以免在运动过程中出现接触不良的问题。
如果接线不牢固,可能会导致舵机无法正常工作或者出现意外的运动。
2.电流过载在连接舵机前,要确保所选用的电源能够满足舵机的工作电流要求。
如果电源电流不够强,可能会导致舵机无法正常运转或者损坏。
此外,如果多个舵机连接在同一个电源上,也要注意总功率是否超过电源的负载能力。
3.接线错误舵机有正负极之分,如果接错极性,可能会导致舵机损坏或者反转运动。
此外,如果使用四线或者串口连接方式,还要注意编码器反馈线和控制信号线的接口。
4. PWM信号频率PWM信号频率也是一个需要注意的问题。
一般来说,大多数舵机的PWM信号频率为50Hz,但有些特殊的舵机可能需要更高的频率才能正常工作。
串口通讯协议书范本

串口通讯协议书范本甲方(提供方):_________________________乙方(使用方):_________________________鉴于甲方拥有串口通讯技术,乙方有使用该技术的需求,双方本着平等互利的原则,经协商一致,就串口通讯技术的使用达成如下协议:第一条定义1.1 串口通讯:指通过串行接口进行数据传输的一种通讯方式。
1.2 数据格式:指在串口通讯中,数据的组织和编码方式。
1.3 通讯速率:指串口通讯中数据传输的速度。
1.4 通讯协议:指双方约定的串口通讯规则和标准。
第二条协议内容2.1 甲方同意向乙方提供符合本协议规定的串口通讯技术。
2.2 乙方同意按照本协议的规定使用甲方提供的串口通讯技术。
第三条通讯参数3.1 数据格式:采用_________标准。
3.2 通讯速率:_________ Baud。
3.3 校验方式:_________。
3.4 停止位:_________。
3.5 通讯协议:_________。
第四条权利与义务4.1 甲方应保证提供的串口通讯技术符合本协议规定的标准。
4.2 乙方应按照本协议规定的参数进行通讯,并保证通讯的合法性和安全性。
4.3 双方应共同维护通讯的稳定性和安全性,不得擅自更改通讯参数。
第五条保密条款5.1 双方应对在本协议履行过程中获知的对方的商业秘密和技术秘密负有保密义务。
5.2 保密期限为协议终止后_________年。
第六条违约责任6.1 如一方违反本协议规定,应承担违约责任,并赔偿对方因此遭受的损失。
第七条协议的变更和解除7.1 本协议的任何变更和补充均需双方书面同意。
7.2 如一方要求解除本协议,应提前_________天书面通知对方。
第八条争议解决8.1 双方因履行本协议所发生的任何争议,应通过友好协商解决。
8.2 如协商不成,任何一方均可向甲方所在地人民法院提起诉讼。
第九条其他9.1 本协议自双方签字盖章之日起生效。
9.2 本协议一式两份,甲乙双方各执一份,具有同等法律效力。
机器人通讯协议标准

机器人通讯协议标准介绍机器人通讯协议标准是指用于机器人之间进行通信的一套规范和标准。
这些标准定义了机器人之间通信的方式、协议的格式、消息的传输方式等。
通过统一的通讯协议标准,不同厂商生产的机器人可以实现互联互通,提高机器人的智能化和自动化水平。
重要性机器人通讯协议标准的制定对机器人行业的发展具有重要的意义。
一方面,通讯协议标准可以促进机器人之间的互联互通,实现数据的共享和交换。
另一方面,通讯协议标准使得不同厂商的机器人可以共同使用同一套软件和硬件系统,降低研发和生产成本,提高机器人的整体性能和稳定性。
发展历程第一代机器人通讯协议标准第一代机器人通讯协议标准主要是针对特定的机器人品牌或型号制定的,缺乏通用性。
每个厂商都有自己的通讯协议,导致不同品牌的机器人之间无法进行通信。
这限制了机器人的发展和应用范围。
第二代机器人通讯协议标准为了解决第一代机器人通讯协议标准的问题,国际机器人协会(RIA)和国际机器人标准化组织(ISO)等组织开始着手制定通用的机器人通讯协议标准。
第二代机器人通讯协议标准基于TCP/IP协议进行设计,采用XML或JSON格式进行数据传输。
这些标准的制定使得不同厂商的机器人可以进行互联互通,加快了机器人技术的发展和应用。
常用的机器人通讯协议标准ROS(机器人操作系统)ROS是一个开放源代码的机器人操作系统,为机器人软件开发提供了一套通用的工具和库。
它提供了一种分布式架构,可以在多个计算节点上运行不同的功能模块。
ROS使用TCP/IP协议进行通信,在通信层面上采用了一种称为ROS话题的消息传输机制,实现了多机器人之间的数据共享和交换。
OPC UA(开放平台通讯统一架构)OPC UA是一种工业自动化通讯协议,用于在不同的设备和应用程序之间进行数据传输和共享。
它提供了跨平台、跨操作系统、跨语言的通讯机制。
OPC UA借鉴了Web服务的思想,使用XML或Binary编码进行数据传输。
它支持发布-订阅模型和请求-响应模型,可以满足不同场景下的通讯需求。
2024版干货ABB机器人串口通信设定和程序编写

干货ABB机器人串口通信设定和程序编写•串口通信基础概念•ABB机器人串口通信设定•程序编写基础知识•ABB机器人程序编写实践目•调试与优化技巧分享•总结与展望录01串口通信基础概念串口通信定义及作用01串口通信是一种异步通信方式,用于实现设备之间的数据传输。
02串口通信在工业自动化、智能家居、汽车电子等领域有广泛应用。
03通过串口通信,可以实现机器人与外部设备的数据交换和控制。
常见串口类型及特点RS-232串口传输距离较远,但传输速率较低,常用于工业控制领域。
RS-422/485串口支持多点通信,传输距离和速率较高,适用于长距离、高速率的数据传输。
USB转串口通过USB接口实现串口通信,方便易用,广泛应用于各种领域。
串口通信协议简介01串口通信协议规定了数据传输的格式和规则。
02常见的串口通信协议有Modbus、Profibus、CAN等。
03在使用ABB机器人进行串口通信时,需要根据具体应用场景选择合适的通信协议。
通过串口通信,机器人可以与外部设备(如传感器、执行器等)进行数据交换和控制。
机器人与外部设备的通信多个机器人之间可以通过串口通信实现协同作业和数据共享。
机器人之间的通信通过串口通信,可以实现对机器人的远程监控和调试,提高维护效率。
远程监控与调试串口通信应用场景02ABB机器人串口通信设定硬件连接与配置选择合适的串口通信设备根据实际需求选择符合要求的串口通信设备,如RS232、RS485等。
连接机器人与串口通信设备使用串口线将机器人控制器与串口通信设备连接起来,并确保连接稳定可靠。
配置机器人串口参数在机器人控制器中设置相应的串口参数,如波特率、数据位、停止位、校验位等,以匹配串口通信设备的参数。
安装串口通信软件在机器人控制器中安装相应的串口通信软件,以便进行串口通信操作。
配置串口通信协议根据实际需求选择合适的串口通信协议,如Modbus、Profibus等,并进行相应的配置。
调整串口通信参数根据实际通信效果,对串口通信参数进行调整,如修改波特率、数据位等,以提高通信质量和稳定性。
机器人常用通讯协议

常用通讯协议协议编号: _______________签署日期: _______________签署地点: _______________协议方信息1.1 技术提供方(甲方)单位名称: ______________________________法定代表人: ______________________________联系地址: ______________________________联系电话: ______________________________1.2 技术使用方(乙方)单位名称: ______________________________法定代表人: ______________________________联系地址: ______________________________联系电话: ______________________________协议目的2.1 本协议旨在规定甲方提供的通讯协议的使用规范,确保乙方在其系统中能够正确、高效地使用该通讯协议进行数据传输和控制。
2.2 本协议涉及的通讯协议包括但不限于:2.2.1 通讯协议类型: ______________________________(如TCP/IP、RS232、CAN等)2.2.2 数据格式: ______________________________(如JSON、XML、Binary等)2.2.3 通讯速率: ______________________________(如Baud Rate、Bandwidth等)2.2.4 错误处理机制: ______________________________(如CRC 校验、重传机制等)技术要求3.1 协议规范3.1.1 协议版本: ______________________________3.1.2 协议标准: ______________________________(如IEEE、ISO标准等)3.1.3 数据传输速率: ______________________________3.1.4 数据包格式: ______________________________(如帧头、帧尾、数据区等)3.2 技术支持3.2.1 甲方应提供相关的技术文档和协议规范,包括协议说明书、接口描述等。
串口总线舵机通信协议

乐幻索尔总线舵机通信协议1.概要采用异步串行总线通讯方式,理论多至253 个机器人舵机可以通过总线组成链型,通过UART 异步串行接口统一控制。
每个舵机可以设定不同的节点地址,多个舵机可以统一运动也可以单个独立控制。
通过异步串行接口与用户的上位机(控制器或PC 机)通讯,您可对其进行参数设置、功能控制。
通过异步串行接口发送指令,可以设置为电机控制模式或位置控制模式。
在电机控制模式下,可以作为直流减速电机使用,速度可调;在位置控制模式下,拥有0-240°的转动范围,外加±30°的偏差可调范围,在此范围内具备精确位置控制性能,速度可调。
只要符合协议的半双工UART 异步串行接口都可以和舵机进行通讯,对舵机进行各种控制2.UART接口原理图舵机用程序代码对UART 异步串行接口进行时序控制,实现半双工异步串行总线通讯,通讯波特率为115200bps,且接口简单、协议精简。
在您自行设计的控制器中,用于和舵机通讯的UART 接口必须如下图所示进行处理。
图13.指令包指令包格式表1:帧头ID号数据长度指令参数校验和0x55 0x55 ID Length Cmd Prm 1…Prm N Checksum帧头:连续收到两个0x55 ,表示有数据包到达。
ID: 每个舵机都有一个ID 号。
ID 号范围0~253,转换为十六进制0x00~0xFD。
广播ID: ID 号254(0xFE) 为广播ID,若控制器发出的ID 号为254(0xFE),所有的舵机均接收指令,但都不返回应答信息,(读取舵机ID号除外,具体说明参见下面指令介绍)以防总线冲突。
数据长度:等于待发送的数据(包含本身一个字节)长度,即数据长度Length 加3等于这一包指令的长度,从帧头到校验和。
指令:控制舵机的各种指令,如位置、速度控制等。
参数:除指令外需要补充的控制信息。
校验和:校验和Checksum,计算方法如下:Checksum = ~ (ID + Length + Cmd+ Prm1 + ... Prm N)若括号内的计算和超出255,则取最低的一个字节,“~”表示取反。
舵机机器人串口协议

最小 PWM(L) 顺时针不灵敏区 逆时针不灵敏区
LED警报 撤销扭矩警报
扭矩开关 LED
目标位置(H) 目标位置(L) 运行时间(H) 运行时间(L) 当前电流(H) 当前电流(L)
锁标志 当前位置(L) 当前位置(H) 运行速度(L) 运行速度(H) 当前负载 (H) 当前负载(L)
当前电压 当前温度 REG WRITE标志
ID: 每个舵机都有一个ID号。ID号范围0~253,转换为十六迚制0X00~0XFD。 广播ID: ID号 254为广播ID,若控制器収出的ID号为254(0XFE),所有的舵机均接收指令,但都不返回应答信息。
数据长度:等于待发送的参数长度N加上2,即“N+2”。 参数:除指令外需要补充的控制信息。
若计算的和超出 255,则取最低的一个字节,“~”表示取反
2.4.2 读指令READ DATA
功能 长度
从舵机的控制表里读出数据 0X04
指令
0X02
参数1
数据读出段的首地址
参数2
读取数据的长度
例 2 读取 ID 为 1 的舵机的当前位置。
在控制表里从地址 0X38 处读取二个字节。
指令帧:0XFF 0XFF 0X01 0X04 0X02
写入第二个舵机的 写入第二个舵机的
写入第二个舵机的第L个数据
不同于REG WRITE+ACTION指令的是实时性比它更高,一条SYNC WRITE指令可一次修改多个舵 机的控制表内容,而REG WRITE+ACTION指令是分步做到的。 尽管如此,使用SYNC WRITE指令时, 写入的数据长度和保存数据的首地址必须相同即必须执行相同的动作。
RAM
字头
ID
串口如何控制舵机

串口如何控制舵机第一章:引言(200-250字)近年来,舵机作为一种常用的电动机械臂,被广泛应用于机器人技术领域。
舵机能够实现精确的角度控制,因此在机器人运动、航空航天以及工业自动化等领域具有重要意义。
而串口作为一种常见的通信接口,被广泛用于与外部设备的通信。
本论文旨在研究串口如何控制舵机的原理与方法,以实现对舵机的精确角度控制。
第二章:舵机控制原理(250-300字)舵机的工作原理是通过提供特定的PWM(脉宽调制)信号来驱动舵机转动。
舵机通常具有三根线,分别是电源线、地线和信号线。
电源线和地线用于供电,信号线用于接收PWM信号。
PWM信号的脉宽决定了舵机的转动角度。
当脉宽为最小值时,舵机转到最左边的极限位置;当脉宽为最大值时,舵机转到最右边的极限位置;当脉宽位于最小值和最大值之间时,舵机转动到对应的中间位置。
第三章:串口通信原理(250-300字)串口通信是一种同步通信方式,主机通过发送和接收数据帧来实现与外部设备的通信。
串口通信常用的通信参数包括波特率、数据位、停止位和校验位等。
在串口通信中,主机通过发送特定的数据帧来控制舵机。
根据舵机的协议规定,发送不同的数据帧可以实现舵机角度的精确控制。
通常通过使用串口通信库来实现与串口的联系,对舵机角度进行设置。
第四章:串口控制舵机实验(250-300字)本章详细介绍了使用串口控制舵机的实验过程。
首先,在电路连接方面,将舵机的电源线和地线与电源相连,将信号线连接到控制器的串口引脚上。
然后,在软件编程方面,使用特定的串口通信库和编程语言编写相应的代码,通过串口发送特定的数据帧来控制舵机的转动角度。
最后,进行实验验证,观察舵机是否按照预期的角度进行转动。
综上所述,本论文通过研究串口如何控制舵机的原理与方法,详细介绍了舵机的工作原理和串口通信的原理。
并通过实验验证了串口控制舵机的可行性和效果。
这对于进一步推动机器人技术的发展,提高机器人的运动精确性具有重要意义。
机器人通讯协议
机器人通讯协议机器人通讯协议甲方:__________________乙方:__________________鉴于双方愿以机器人通讯方式进行合作,并在此基础上遵守中国的相关法律法规,制定本协议。
一、双方基本信息甲方:公司名称、地址、联系人、联系方式、统一信用代码。
乙方:公司名称、地址、联系人、联系方式、统一信用代码。
二、各方身份、权利、义务、履行方式、期限、违约责任1.甲方身份甲方为机器人制造商,拥有该机器人的所有权、知识产权等合法权益。
2.乙方身份乙方为机器人使用单位,拥有使用该机器人的合法权益,应保证机器人使用安全稳定。
3.甲方权利(1)拥有机器人的所有权、知识产权等权益。
(2)机器人的研发、制造、质量控制、售后服务等工作。
(3)有权制定机器人使用指南和技术规范,并向乙方提供必要的使用指导和培训。
(4)有权根据紧急情况或必要情况暂停或终止机器人服务。
4.乙方权利:(1)享有机器人在法律允许范围内的合法使用权,并应保证机器人使用安全稳定。
(2)有权根据需要向甲方提出机器人改进或升级的建议,甲方应积极响应。
(3)有权拥有机器人使用期限内的维修和保养服务,甲方应提供技术支持和售后服务。
5.甲方义务:(1)保证机器人质量达到国家质量标准和技术规范要求,若出现问题需及时处理。
(2)为乙方提供所需的技术指导和培训服务。
(3)提供机器人的维修和保养服务。
(4)遵守法律法规和职业道德,保证合法行为。
6.乙方义务:(1)按照机器人使用指南和技术规范操作机器人,保证机器人的正常运行和安全使用。
(2)根据甲方要求,提供机器人使用情况和反馈建议。
(3)支付机器人租赁或购买费用。
(4)遵守法律法规和职业道德,保证合法行为。
7.履行方式:(1)甲方应在机器人投入使用前向乙方提供机器人使用指南和技术规范。
(2)乙方应按照机器人使用指南和技术规范操作机器人,并定期进行维修和保养。
(3)双方应定期沟通交流,完善服务质量和机器人使用效果。
串行总线舵机原理及实现方式
串行总线舵机原理及实现方式
串行总线舵机是一种通过串行总线通信来控制的舵机,可以同时控制多个舵机,方便集中控制。
其原理和实现方式如下:
1. 原理:
串行总线舵机采用串行通信的方式,通过传输特定协议的数据来控制舵机的运动。
它一般包括三个主要部分:控制器、舵机和总线。
控制器对外提供控制接口,可以通过点击按钮、旋转旋钮或者使用电脑软件等方式来发送特定的指令给舵机。
舵机接收到指令后,根据指令中的参数,控制自身的位置、速度和力矩等参数。
总线是连接控制器和舵机的通信线路,负责数据的传输。
2. 实现方式:
(1)硬件实现方式:串行总线舵机通常使用同步串行通信协议,如RS-485、CAN总线、I2C等。
控制器和舵机通过总线连接,控制器可以通过发送特定格式的数据包来控制舵机。
舵机接收到数据包后解析数据,并执行相应的动作。
硬件上,舵机中通常搭载了一个微控制器,用来接收、解析和执行指令。
(2)软件实现方式:舵机的控制也可以通过软件进行实现,比如通过串口通信,将舵机控制指令通过串口发送给舵机,舵机通过串口接收指令并执行相应动作。
这种方式需要控制器具备串口输出功能,舵机具备串口输入功能,同时需要软件开发支持。
总之,串行总线舵机通过串行通信方式来控制多个舵机,具有
集中控制、高效、方便等特点。
可以根据实际需求选择合适的硬件和软件实现方式。
机器人通讯协议标准

机器人通讯协议标准机器人通讯协议标准是指机器人之间或机器人与其他设备之间进行通讯时所遵循的一套规范。
这些规范包括通讯协议、数据格式、命令集等,旨在实现机器人之间的互操作性和数据交换。
机器人通讯协议标准的制定是为了解决机器人之间通讯的问题。
在机器人应用领域,不同厂商生产的机器人之间存在着通讯协议不兼容的问题,这导致了机器人之间的数据交换和互操作性受到了很大的限制。
为了解决这个问题,机器人通讯协议标准应运而生。
机器人通讯协议标准的制定需要考虑以下几个方面:1. 通讯协议:通讯协议是机器人之间进行通讯的基础,通讯协议的制定需要考虑通讯的稳定性、速度、安全性等因素。
2. 数据格式:机器人之间进行数据交换需要遵循一定的数据格式,数据格式的制定需要考虑数据的类型、大小、精度等因素。
3. 命令集:机器人之间进行通讯需要遵循一定的命令集,命令集的制定需要考虑机器人的功能、操作方式等因素。
目前,机器人通讯协议标准主要有以下几种:1. ROS:ROS是机器人操作系统(Robot Operating System)的缩写,是一个开源的机器人通讯协议标准。
ROS提供了一套完整的机器人操作系统,包括通讯协议、数据格式、命令集等,可以实现机器人之间的互操作性和数据交换。
2. OPC UA:OPC UA是一种工业自动化领域的通讯协议标准,可以实现不同设备之间的数据交换和互操作性。
OPC UA提供了一套完整的通讯协议、数据格式和命令集,可以用于机器人之间的通讯。
3. Modbus:Modbus是一种工业自动化领域的通讯协议标准,可以实现不同设备之间的数据交换和互操作性。
Modbus提供了一套简单的通讯协议、数据格式和命令集,可以用于机器人之间的通讯。
机器人通讯协议标准的制定对机器人应用领域的发展具有重要的意义。
通过制定通用的通讯协议标准,可以实现不同厂商生产的机器人之间的互操作性和数据交换,促进机器人应用领域的发展。
同时,机器人通讯协议标准的制定也可以提高机器人的安全性和稳定性,为机器人应用领域的发展提供有力保障。
优必选舵机的控制协议

优必选舵机的控制协议1.引言1.1 概述在现代科技的快速发展下,舵机作为一种控制装置,在机器人、航空航天、自动化等领域被广泛应用。
优必选作为舵机领域的知名品牌,其控制协议被越来越多的开发者和科研人员采用。
本文将对优必选舵机的控制协议进行深入探讨。
我们将首先介绍优必选舵机的简介,包括其主要特点和优势。
然后,我们将详细解释控制协议的概念和原理,并探讨其在实际应用中的作用和意义。
通过这些内容,读者能够全面了解和掌握优必选舵机控制协议的相关知识。
本文将以简明扼要的方式呈现优必选舵机的控制协议,以便读者能够轻松理解和应用。
我们还将列举一些实际案例,展示控制协议的实际应用场景和效果。
最后,我们将总结文章的主要内容,并展望未来优必选舵机控制协议的发展方向。
通过阅读本文,读者将会对优必选舵机的控制协议有更深入的了解,并能够应用于实际项目中。
我们相信,优必选舵机的控制协议将为机器人和自动化技术的发展做出更大的贡献。
文章结构部分的内容是对整篇文章的一次概括,可以简要介绍各个章节的主要内容和顺序。
在本篇文章中,文章结构如下所示:1. 引言- 1.1 概述:简要介绍优必选舵机和控制协议的背景和概要。
- 1.2 文章结构:介绍整篇文章的章节组成和顺序。
- 1.3 目的:说明撰写这篇文章的目的和意义。
2. 正文- 2.1 优必选舵机简介:详细介绍优必选舵机的特点、功能和应用领域。
- 2.2 控制协议介绍:对优必选舵机的控制协议进行详细解析,包括通信协议、数据格式等方面的内容。
- 2.3 控制协议的应用:讨论优必选舵机控制协议在实际应用中的具体案例和效果。
3. 结论- 3.1 总结:总结优必选舵机控制协议的特点、应用和优势。
- 3.2 未来展望:展望优必选舵机控制协议在未来的发展方向和应用前景。
- 3.3 结束语:对整篇文章进行一个简短的总结,并表达相关的感谢或期望。
通过以上的文章结构,读者能够清晰地了解到整篇文章的主要内容和组织方式,从而更好地理解和阅读文章。
如何控制串口舵机

如何控制串口舵机章节一:引言在现代的智能控制系统中,舵机被广泛应用于各种机器人、无人机以及其他自动化设备中。
通过控制串口舵机的转动角度,可以实现对设备的精准控制,提高其运动的稳定性和准确性。
本论文将介绍如何通过串口控制舵机,并详细讨论舵机控制的理论和实践。
章节二:舵机控制的原理舵机是一种能够感知和响应控制信号的电动机,与普通电动机相比,舵机在转动角度的精确性和稳定性方面更加优越。
舵机控制的关键是通过给舵机发送特定的脉冲信号来确定其转动角度。
脉冲信号的周期和占空比决定了舵机的位置,其中周期用于确定舵机的转动速度,而占空比则用于确定舵机的转动角度。
章节三:串口舵机的控制方法当前,主流的舵机控制方式包括PWM(脉宽调制)控制和串口控制。
串口舵机相对于PWM舵机而言,具有更高的精确度和稳定性,并且可以实现更加复杂的控制操作。
串口舵机通过与计算机或其他智能设备进行串口通信,通过发送特定的指令来控制舵机的转动角度。
1. 串口舵机的连接:需要将串口舵机与计算机或其他控制设备通过串口线连接起来,并保证连接的可靠性。
2. 串口舵机的驱动程序安装:将舵机所需的驱动程序安装到计算机或其他控制设备上,并确保驱动程序的正常运行。
3. 串口舵机的指令发送:通过编程或者使用相应的控制软件,向舵机发送特定的指令来控制其转动角度。
指令的格式和内容应该符合舵机的控制协议要求。
4. 串口舵机的参数调整:根据具体的应用场景,可以对串口舵机的一些参数进行调整,如转动角度的范围、转动速度的快慢等。
章节四:实例分析和应用展望本章将通过一个实例来进一步说明如何控制串口舵机。
以机器人手臂为例,通过串口舵机控制机器人手臂的转动角度,可以实现对物体的抓取和放置功能。
同时,还可以通过控制多个串口舵机的组合动作,实现更加复杂的运动轨迹。
串口舵机的应用前景非常广阔,未来还可以在无人机、人机交互、医疗器械等领域得到更加广泛的应用。
综上所述,通过本论文的介绍,读者可以了解到如何控制串口舵机,并且可以对串口舵机的原理和控制方法有一个清晰的认识。
串行总线舵机的通信协议

串行总线舵机的通信协议一、引言舵机是一种常用的机械驱动装置,广泛应用于机器人、模型、遥控器等领域。
而串行总线舵机通信协议则是指舵机与控制器之间进行通信时所采用的协议。
二、串行总线舵机的工作原理串行总线舵机通过串行总线与控制器进行通信。
控制器发送指令给舵机,舵机接收并执行指令,并将执行结果返回给控制器。
具体来说,串行总线舵机通信协议包括指令帧和应答帧两部分。
1. 指令帧指令帧是控制器发送给舵机的指令信息,包括舵机的ID、指令类型、参数等。
其中,舵机的ID用于区分多个舵机,指令类型用于指示舵机执行的动作,参数则是指令所需的附加信息。
在发送指令帧时,控制器会将指令信息按照特定的格式打包,并通过串行总线发送给舵机。
2. 应答帧应答帧是舵机对指令帧的响应,用于告知控制器指令的执行情况。
应答帧包括舵机的ID、执行结果、状态等信息。
其中,执行结果用于反馈指令的执行情况,状态则是舵机当前的工作状态。
舵机在接收到指令后,会执行相应的动作,并将执行结果打包成应答帧发送给控制器。
三、串行总线舵机的通信协议格式串行总线舵机通信协议的格式可以分为指令帧格式和应答帧格式两部分。
1. 指令帧格式指令帧格式包括起始位、ID、指令类型、参数、校验和等字段。
其中,起始位用于标识帧的开始,ID用于区分不同的舵机,指令类型用于指示舵机执行的动作,参数则是指令所需的附加信息,校验和用于校验帧的完整性。
控制器在发送指令帧时,需要按照指令帧格式将指令信息打包,并在最后添加校验和。
2. 应答帧格式应答帧格式包括起始位、ID、执行结果、状态、校验和等字段。
起始位用于标识帧的开始,ID用于区分不同的舵机,执行结果用于反馈指令的执行情况,状态则是舵机当前的工作状态,校验和用于校验帧的完整性。
舵机在接收到指令后,会执行相应的动作,并将执行结果打包成应答帧发送给控制器。
四、串行总线舵机通信协议的特点串行总线舵机通信协议具有以下特点:1. 简单易用:串行总线舵机通信协议采用简单的指令格式,控制器只需要按照指定格式发送指令,舵机便能执行相应的动作。
舵机 控制 串口

舵机控制串口章节一:引言引言部分介绍舵机控制串口的背景和意义,说明舵机控制串口技术在各个领域中的广泛应用,包括机器人、航空模型、自动化等。
同时简要介绍舵机和串口通信的基本概念与原理,为后续章节的内容做初步铺垫。
章节二:舵机控制串口技术的原理与方法本章节详细介绍舵机控制串口技术的原理和方法。
首先,介绍数字舵机的基本工作原理,包括电机控制、位置反馈以及位置控制等。
然后,介绍串口通信的基本概念和原理,包括串口通信协议、波特率、数据格式等。
接着,介绍如何利用串口通信来实现对舵机的控制,包括串口发送数据格式、通信协议以及控制指令的解析与执行等。
章节三:舵机控制串口的应用案例本章节通过实际案例来展示舵机控制串口技术的应用。
首先,介绍机器人领域中舵机控制串口技术的应用,包括机器人的姿态调整、臂部运动等。
然后,介绍航空模型领域中舵机控制串口技术的应用,包括飞机方向舵、升降舵等的控制。
最后,介绍自动化领域中舵机控制串口技术的应用,包括工业生产线上的自动化控制系统等。
章节四:舵机控制串口技术的发展与展望本章节对舵机控制串口技术的发展进行展望。
首先,分析当前舵机控制串口技术的发展状况和存在的问题,如通信速率、稳定性等。
然后,提出发展舵机控制串口技术的目标和方向,包括提高通信速率、增强通信稳定性和可靠性等。
最后,展望未来舵机控制串口技术的应用前景,如智能交通领域、智能家居领域等。
总结:本论文主要围绕舵机控制串口技术展开,通过介绍技术原理、应用案例和未来发展前景,全面了解舵机控制串口技术的重要性和作用。
这对于相关领域的工程师和研究人员具有一定的参考价值和指导意义。
章节一:引言引言部分介绍舵机控制串口的背景和意义,说明舵机控制串口技术在各个领域中的广泛应用,包括机器人、航空模型、自动化等。
同时简要介绍舵机和串口通信的基本概念与原理,为后续章节的内容做初步铺垫。
舵机是一种可以精确控制角度的电机装置,主要由电机、减速器和位置反馈器组成。
AX-12数字舵机手册 中文
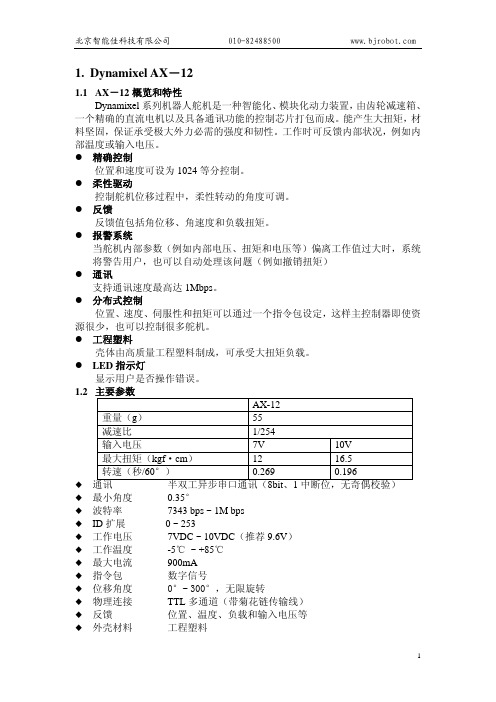
7V
10V
最大扭矩(kgf·cm)
12
16.5
转速(秒/60°)
0.269
0.196
通讯 最小角度
半双工异步串口通讯(8bit、1 中断位,无奇偶校验) 0.35°
波特率 ID 扩展 工作电压
7343 bps ~ 1M bps
0 ~ 253 7VDC ~ 10VDC(推荐 9.6V)
就可以连接多个舵机。
控制器“CM-5”
z 主控制器
为了控制舵机,主控制器必须支持 TTL 半双工 UART 协议。
这里推荐使用 CM-5 控制器,也可以使用其它合适的控制器。
z 计算机连接 计算机通过 RS232 与控制器连接,再通过控制器控制舵机。
z 与 UART 连接 要控制 Dynamixel 舵机,主控制器需要转换 UART 信号为
2
北京智能佳科技有限公司
010-82488500
半双工信号。下图为推荐电路图。
舵机供电来自主控制器针脚 1 和针脚 2。(上图只用于说明半双工 UART 的
使用。CM-5 控制器已内嵌上述电路,因此 Dynamixel 舵机可直接与之连接。)
TTL 发射和接收数据信号的方向取决于下面的“方向端口”信号水平:
要求舵机执行的指令。
除指令本身之外,如果还有附加信息需要传送,用该值表示。
“校验码”的计算方法如下: CheckSum = ~(ID + Length + Instruction + Parameter1 + … + Parameter N) 如果计算结果大于 255,则后面字节的值设为校验码的值。 “~”表示非逻辑运算。 3.3 状态包(反馈包) 状态包是舵机接收主控制器的指令包后传回的响应包。状态包的结构如下:
工业机器人通信协议

工业机器人通信协议工业机器人通信协议甲方(以下简称“机器人制造商”):地址:联系电话:法定代表人:乙方(以下简称“客户”):地址:联系电话:法定代表人:鉴于机器人制造商和客户希望在工业生产中使用机器人设备,在双方自愿、平等、协商的基础上,达成以下协议:第一条双方的基本信息1.1 机器人制造商是一家合法成立的企业,注册地址在中国,拥有法定经营资格。
1.2 客户是一家合法成立的企业,注册地址在中国,拥有法定经营资格。
第二条各方身份、权利、义务、履行方式、期限、违约责任2.1 机器人制造商的身份:机器人设备的制造商、销售商;客户的身份:机器人设备的购买商、使用方。
2.2 机器人制造商的权利和义务:2.2.1 咨询客户有关机器人设备的技术、性能、价格等问题;2.2.2 开展机器人设备的销售、交付等业务;2.2.3 向客户提供售后服务和技术支持;2.2.4 遵守中国相关法律法规,保障客户的合法权益。
2.3 客户的权利和义务:2.3.1 购买机器人设备;2.3.2 按照双方协商的方案和标准使用机器人设备;2.3.3 按照双方约定的时间和方式支付机器人设备的价格;2.3.4 遵守中国相关法律法规,保障机器人制造商的合法权益;2.3.5 负责机器人设备的安装、调试、运行和维护等工作;2.3.6 严格遵守机器人设备的操作规程,确保机器人设备的稳定运行和安全;2.3.7 对机器人设备发生故障或损坏时,及时联系机器人制造商进行检修和维修。
2.4 履行方式和期限2.4.1 机器人制造商和客户应按照相关条款和约定执行各项义务,并严格履行各项协议内容。
2.4.2 机器人制造商应按照约定时间交付机器人设备,客户应按照约定时间和方式支付机器人设备的价格。
2.4.3 机器人制造商和客户应保持联系,及时解决问题,保障合同履行的正常进行。
2.5 违约责任2.5.1 一方因违反合同约定而导致另一方受到损失的,应承担相应的赔偿责任。
2.5.2 双方应当通过友好协商解决争议,如协商未能解决,应提交有关仲裁机构或司法机关处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
字头ID 有效数据长度指令参数校验和0XFF 0XFF 0XFE 0X040X030X03
0X010XF6
校验和的计算方法如下:
2.4.2 读指令READ DATA
功能
长度
指令
参数1
参数2
指令帧:0XFF 0XFF 0X01 0X04 0X02
0X38 0X02 0XBE
字头ID 指令参数
OXFF X0FF 0X010X020X38 0X20
字头ID 工作状态参数
0XFF 0XFF 0X010X000X00 0X20
2.4.3 异步写指令REG WRITE
2.4.7 同步写指令SYNC WRITE
功能 用于同时控制多个舵机。
REG WRITE指令相似于 WRITE DATA,只是执行的时间不同。
当收到REG WRITE指令帧时,把收到的数据储存在缓冲匙备用,并把Registered Instruction寄存器(Address 0x2c)置1。
当收到ACTION指令后,储存的指令最终被执行。
因为采用广播ID収送指令,所以不会有数据返回
Check Sum = ~ (ID + Length + Instruction + Parameter1 + ... Parameter N) 若计算的和超出 255,则取最低的一个字节,“~”表示取反
从舵机的控制表里读出数据 0X040X02 数据读出段的首地址 读取数据的长度功能 触収REG WRITE指令
长度 0X02
例 2 读取 ID 为 1 的舵机的当前位置。
在控制表里从地址 0X38 处读取二个字节。
有效数据长度0X04返回的数据帧: 0XFF 0XFF 0X01 0X03 0X00 0X20 0XDB
有效数据长度0X04 读出的数据是 0x0020,说明当前的位置为 32°(0x0020)。
长度 N+3 (N 为要写入数据的个数)
指令 0X04
参数1 数据要写入匙的首地址
参数2 要写入的第一个数据
参数3 要写入的第二个数据
参数N+1 要写入的第N个数据
2.4.4 执行异步写指令ACTION
指令 0X05
参数 无
ACTION 指令在同时控制多个舵机时非常有用。
在控制多个独立的舵机时,使用ACTION指令可以使第一个和最后一个舵机同时执行各自的动作,中间无延时。
对多个舵机发送ACTION指令时,要用到广播ID(0xFE),因此,収送此指令不会有数据帧返回。
ID
0XFE 指令 0X83
参数1 写入数据的首地址
参数2 写入的数据的长度
(L)
参数3 第一个舵机的ID号
参数4 写入第一个舵机的
第一个数据
参数5 写入第一个舵机的
第二个数据
...
参数 L+3 写入第一个舵机的
第L个数据
参数 L+4 第二个舵机的ID号
参数 L+5 写入第二个舵机的
第一个数据
参数 L+6 写入第二个舵机的
第二个数据
…
….
参数 2L+4 写入第二个舵机的第L个数据
不同于REG WRITE+ACTION指令的是实时性比它更高,一条SYNC WRITE指令可一次修改多个舵机的控制表内容,而REG WRITE+ACTION指令是分步做到的。
尽管如此,使用SYNC WRITE指令时,写入的数据长度和保存数据的首地址必须相同即必须执行相同的动作。
长度 (L + 1) * N + 4 (L: 发给每个舵机的数据长度, N: 舵机的个数)
第三章 内存控制表
3.1 内存控制表
地址
0(0x00)1(0x01)
2(0x02)
3(0x03)
4(0x04)
5(0x05)
6(0x06)
7(0x07)
8(0x08)
9(0x09)
10(0x0A)
11(0x0B)
12(0x0C)
13(0x0D)
14(0x0E)
15(0x0F)
16(0x10)
17(0x11)
18(0x12)
19(0x13) 机器人舵机本身的信息和控制参数形成了一张表,保存在其控制芯片的RAM和EEPROM匙域。
我们通表,内容如下:
命令项读写------------读/写软件版本(H)读软件版本(L)读ID 读/写最大角度限制(H)读/写波特率读/写返回延迟时间读/写应答状态级别最小角度限制(H)读/写最小角度限制(L)读/写最大角度限制(L)读/写温度上限读/写电压上限读/写电压下线读/写最大扭矩(H)读/写最大扭矩(L)读/写----卸载条件读/写
20(0x14)21(0x15)22(0x16)23(0x17)24(0x18)25(0x19)26(0x1A)27(0x1B)28(0x1C)29(0x1D)40(0x28)41(0x29)0X0042(0x2A)43(0x2B)44(0x2C)00(0x00)45(0x2D)00(0x00)46(0x2E)47(0x2F)48(0x30)00(0x00)56(0x38)57(0x39)58(0x3A)59(0x3B)60(0x3C)61(0x3D)62(0x3E)63(0x3F)64(0x40)00(0x00)
65(0x41)读/写电流阀值(L)读/写中位调整 (H)中位调整(L)读/写电流阀值(H)读/写最小 PWM(H)读/写最小 PWM(L)读/写顺时针不灵敏区读/写运行时间(H)读/写逆时针不灵敏区读/写LED警报读/写撤销扭矩警报读/写当前位置(L)读扭矩开关读/写LED 读/写目标位置(H)读/写目标位置(L)读/写当前负载(L)读运行时间(L)读/写当前电流(H)读当前电流(L)读锁标志读/写REG WRITE标志读当前位置(H)读运行速度(L)读当前电压读当前温度读运行速度(H)读当前负载 (H)读
我们通过实时修改表里的内容,可以达到实时控制舵机的目的。
这张表称为内存控制
初始值
存储匙域0x01
--
--
--
0x01
--
--
0x10 (4096)
0x00
0x00
0x00 (0)
0x00
0x20
0x00
0x50(80°)
0x08
0x04
0x03(800)
0x00
0x00EEPROM
0x00
0x00
0x01(500ma)
0xf4
0x00
0x00
0x00
0x00
0x04
0x04 RAM。