Iterative Closest Point
2d 点到线的 icp算法
2d 点到线的 icp算法
ICP(Iterative Closest Point)算法是一种用于将两个点云或者曲面进行配准的算法,它可以用于2D点到线的配准。
ICP算法的基本思想是通过迭代的方式不断优化一个点云到另一个点云的匹配关系,直到达到最优的配准效果。
在2D点到线的ICP算法中,首先需要有两组数据,一组是点云数据,另一组是线数据。
算法的第一步是初始化变换矩阵,通常是一个单位矩阵或者一个粗略的估计值。
然后,ICP算法通过计算点云中每个点到线的最近点的距离,并将这些距离最小化来调整变换矩阵,使得点云与线的匹配关系得到改善。
这个过程通过迭代来进行,直到达到收敛条件为止。
在每次迭代中,ICP算法通过最小化点云中每个点到线的最近点的距离来更新变换矩阵,这通常使用最小二乘法来实现。
ICP算法还可以使用不同的策略来加速收敛,例如采用不同的距离度量或者引入权重等。
另外,ICP算法还有一些变种,例如非刚性ICP(Non-Rigid ICP)用于处理非刚性变形的配准问题,以及多尺度ICP(Multi-
Scale ICP)用于处理尺度不同的数据的配准问题。
总的来说,2D点到线的ICP算法通过迭代优化点云到线的匹配关系,是一种常用的配准算法,可以在机器视觉、三维重建等领域发挥重要作用。
激光雷达定位算法
激光雷达定位算法
激光雷达定位算法是利用激光雷达传感器获取的点云数据进行目标定位和环境感知的算法。
以下是一般情况下常用的几种激光雷达定位算法:
1.Iterative Closest Point (ICP):ICP是一种广泛应用的算法,用于在两个点云之间进行配准,即找到它们之间的最佳转换关系。
在激光雷达定位中,ICP 可用于匹配当前扫描的点云与先前存储的地图点云,以更新机器人的位置。
2.Monte Carlo Localization (MCL):也被称为粒子滤波定位,MCL是一种蒙特卡罗方法,通过对机器人在地图上的可能位置进行随机抽样,通过比较观测值和测量值来估计机器人的准确位置。
3.Extended Kalman Filter (EKF):EKF是一种递归贝叶斯滤波方法,常用于激光雷达定位中的状态估计。
通过将机器人的运动模型和观测模型线性化,EKF可以通过递归的方式更新机器人的状态估计。
4.FastSLAM:FastSLAM是一种基于粒子滤波的SLAM(同步定位与地图构建)算法。
它使用粒子滤波对机器人在地图上的位置进行估计,并同时构建地图。
5.Lidar Odometry:利用激光雷达数据进行里程计估计的方法,通常基于点云的特征提取和匹配,计算机器人的运动。
6.Scan Matching:这是一种基于点云的匹配算法,用于估计机器人的运动。
它可以通过比较两个点云之间的相似性来计算机器人的运动。
激光雷达定位算法的选择通常取决于具体的应用场景、传感器的性能和要求,以及实时性等因素。
近年来,随着深度学习技术的发展,一些基于神经网络的方法也开始在激光雷达定位领域得到应用。
语义icp算法 python

语义icp算法python全文共四篇示例,供读者参考第一篇示例:ICP算法(Iterative Closest Point)是一种用于计算两个点云之间的最佳对应关系的算法。
在计算机视觉、机器人及地图建模等领域中,ICP算法被广泛应用于点云配准、三维重建等任务中。
语义ICP算法则在传统的ICP算法基础上加入了语义信息,使得配准结果更加准确且语义一致。
在本文中,我们将详细介绍语义ICP算法的原理及其在Python中的实现,以帮助读者更好地理解和应用该算法。
一、语义ICP算法原理ICP算法是一种迭代优化的算法,其原理如下:(1)初始化:假设有两个点云A和B,需要找到一个变换矩阵T,使得点云A经过变换后能够与点云B最好地对齐。
初始时,可以随机选择一个初始变换矩阵T0。
(2)对应点对匹配:通过计算点云A中每个点与点云B中所有点之间的距离,找到最近的点对之间的对应关系。
(3)计算最优变换矩阵:根据对应点对的关系,使用最小二乘法等优化方法计算出最优的变换矩阵T。
(4)更新点云A:根据新的变换矩阵T,更新点云A的位置。
(5)重复步骤2至4,直到收敛或达到最大迭代次数。
语义ICP算法在传统ICP算法的基础上加入了语义信息,使得配准结果更加准确且符合语义要求。
其原理如下:(1)数据预处理:对点云进行语义分割,将点云的每个点分为不同的类别,如地面点、建筑物点等。
(2)点对匹配:在配准过程中,优先考虑语义信息相同的点对,进行对应关系的匹配。
(3)残差计算:在计算配准误差时,根据语义信息对不同类别的点赋予不同的权重,使得误差更加准确地反映配准结果。
(4)最优变换矩阵计算:在计算最优变换矩阵时,考虑了语义信息的影响,使得配准结果更加符合语义要求。
(5)迭代优化:通过迭代优化的方式,不断更新点云位置及变换矩阵,直至收敛或达到最大迭代次数。
二、Python实现语义ICP算法接下来我们将介绍如何使用Python实现语义ICP算法。
基于点云配准的位姿估计方法研究
点云配准是指将两个或多个点云数据集匹配以获得它们之间的相对位姿。
点云配准在机器人自主导航、三维重建和工业制造等领域中广泛应用。
以下是一些基于点云配准的位姿估计方法的研究:
1. Iterative Closest Point (ICP)算法:ICP算法是一种经典的点云配准方法,其基本思想是通过迭代最小化点云之间的距离来实现配准。
ICP 算法可以用于刚体变换估计,如平移、旋转和缩放。
2. 概率数据关联(PDA)算法:PDA算法是一种基于贝叶斯滤波的点云配准方法。
该算法在点云中引入了相似度度量,通过最大化概率匹配来实现点云配准。
PDA算法可以解决非刚性变形的配准问题。
3. 基于特征描述子的配准方法:该方法通过提取点云中的局部特征描述子,如SIFT、SURF、SHOT等,将点云数据集转换为特征向量表示。
然后使用特征向量进行匹配以获取点云之间的相对位姿。
4. 基于深度神经网络的配准方法:该方法利用深度神经网络来学习点云特征表示,通过点云之间的相似性损失函数进行训练,实现点云配准和位姿估计。
5. 非刚性变形配准方法:这种方法可以处理非刚性物体的点云配准问题。
传统的刚性变换方法不能解决这些问题,因为非刚性物体的形
状可能随时间变化。
非刚性变形配准方法通过使用弹性变形模型来建模非刚性物体的形变,并通过最小化形变来实现点云配准。
上述方法各有优缺点,适用于不同的应用场景。
在实际应用中,需要根据具体问题选择最合适的方法,并结合其他技术来实现精确的位姿估计。
icp算法 公式

icp算法公式ICP算法介绍ICP(Iterative Closest Point)算法是一种迭代算法,用于在点云数据中寻找最佳的刚体变换(旋转和平移),将一个点云对齐到另一个点云上。
公式ICP算法主要使用以下两个公式:1.步骤一:找到最佳匹配点对首先,需要找到两个点云之间的最佳匹配点对,即将点云A上的一个点Pi对齐到点云B上的一个点Qj。
为了衡量两个点的相似度,可以使用欧氏距离作为指标:[公式1](其中,(xi, yi, zi)表示点Pi的坐标,(xj, yj, zj)表示点Qj的坐标。
2.步骤二:计算最佳刚体变换找到最佳匹配点对后,可以计算最佳的刚体变换,即旋转矩阵R和平移向量T。
对于每个点Pi和对应的最佳匹配点Qj,可以表示如下:[公式2](其中,R表示旋转矩阵,T表示平移向量。
示例以下是一个简单的示例,说明ICP算法如何对齐两个点云。
假设有两个点云A和B,其中A包含三个点P1(1, 2, 3)、P2(4, 5, 6)和P3(7, 8, 9),B包含三个点Q1(, , )、Q2(, , )和Q3(, , )。
1.步骤一:找到最佳匹配点对对于点云A中的点P1,最佳匹配点是B中的点Q1。
同样地,P2和P3分别与Q2和Q3匹配。
计算它们的欧氏距离:–dist(P1, Q1) = sqrt(()^2 + ()^2 + ()^2) ≈–dist(P2, Q2) = sqrt(()^2 + ()^2 + ()^2) ≈–dist(P3, Q3) = sqrt(()^2 + ()^2 + ()^2) ≈2.步骤二:计算最佳刚体变换在本示例中,可以假设旋转矩阵R为单位矩阵,平移向量T为零向量。
代入公式2,可以得到对应的点:–Q1 = R*P1 + T = P1 + T = (1, 2, 3)–Q2 = R*P2 + T = P2 + T = (4, 5, 6)–Q3 = R*P3 + T = P3 + T = (7, 8, 9)这意味着点云A已经与点云B对齐,因为它们的点对应一致。
icp-slides
Iterative Closest Point (ICP) Algorithm. – p.
Absolute Distances or L1 norm
Why bother? More stable to presence of outliers Better statistical estimator in case of non-gaussian noise (sparse, high-kurtosis) might help to avoid local minima’s How? use some parametric approximation for y = |x| and do non-linear optimization present this as a convex linear programming problem
LP: Results
0.25 0.2 Rotation (R) 0.15 0.1 0.05 0
0
100
200
300 # of outliers
400
500 2 norm st 1 norm
nd
600
0.4
Translation (t)
0.3
0.2
0.1 0 100 200 300 # of outliers 400 500 600
Arguments: rotation matrix R and translation vector t Rigid Transformation: p = Rp + t ˙ Problem: How to ensure that R is rotation matrix? “Solution”: Take a set of “support” vectors in object space and specify their length explicitly. pj − pk − p j − p k = 0 ˙ ˙ p i , pj ∈ P
vtkiterativeclosestpointtransform 参数解释 -回复

vtkiterativeclosestpointtransform 参数解释-回复vtkIterativeClosestPointTransform是一个用于点云配准的VTK类。
点云配准是指将两个或多个点云之间进行对齐的过程,以使它们具有相同的坐标系和空间位置。
vtkIterativeClosestPointTransform通过最小化两个点云之间的距离来实现点云配准。
以下将详细解释vtkIterativeClosestPointTransform的参数。
1. vtkIterativeClosestPointTransform的构造函数vtkIterativeClosestPointTransform的构造函数用于创建一个vtkIterativeClosestPointTransform对象。
构造函数的相关参数如下:- Input: 输入点云数据,可以是vtkPolyData、vtkUnstructuredGrid、vtkPolyDataCollection等类型的数据。
- Target: 目标点云数据,与输入点云数据进行配准。
- Transform: 变换矩阵,初始时默认为单位矩阵。
例如,可以使用以下代码创建vtkIterativeClosestPointTransform对象:pythontransform = vtk.vtkIterativeClosestPointTransform()2. SetSource和SetTarget方法vtkIterativeClosestPointTransform类提供了SetSource和SetTarget 方法用于设置输入点云和目标点云。
这些方法接受vtkPointSet类型的数据作为参数。
pythontransform.SetSource(source)transform.SetTarget(target)3. SetMaximumNumberOfIterations方法SetMaximumNumberOfIterations方法用于设置迭代的最大次数。
ICP系列算法的描述与对比
ICP系列算法的描述与对比【摘要】ICP(Iterative Closest Point)系列算法是一种用于三维重建和匹配的常用算法,本文将对ICP算法及其改进进行描述和对比。
首先介绍ICP算法的原理,并分析其优缺点。
随后讨论ICP改进算法的描述和性能对比。
最后探讨ICP算法在三维重建中的具体应用。
在总结ICP系列算法的特点和未来发展趋势,并探讨其在不同领域的应用前景。
通过对ICP系列算法的深入研究和讨论,可以更好地理解和应用这些算法,为三维重建和匹配领域的发展提供有益参考。
【关键词】ICP系列算法、描述、对比、原理、优缺点、改进、性能对比、三维重建、应用、总结、展望、适用领域、发展趋势1. 引言1.1 ICP系列算法的描述与对比ICP(Iterative Closest Point)系列算法是一种用于三维重建和配准的常见算法。
该算法通过迭代优化点云数据之间的对应关系,从而实现模型间的匹配和对齐。
ICP系列算法包括传统的ICP算法、基于特征的ICP算法、快速ICP算法等多种变种,每种算法在不同的场景下有其独特的优点和局限性。
ICP算法描述与原理:ICP算法通过不断迭代,将两个点云数据之间的最小距离对应点匹配,然后通过最小二乘法求解出最优的刚体变换矩阵,从而实现点云的配准和重建。
ICP算法优缺点对比:ICP算法具有简单易实现、计算速度较快的优点,但在大规模点云数据和遮挡较多的情况下存在精度不高、易陷入局部最优的缺点。
ICP改进算法描述:针对传统ICP算法的局限性,研究者提出了各种改进算法,如基于局部特征的ICP算法、加速ICP算法等,通过引入更多信息或优化策略来提高配准精度和效率。
ICP改进算法性能对比:改进算法相较于传统ICP算法,在配准精度和速度上有所提升,但在具体应用场景下表现有所差异。
ICP算法在三维重建中的应用:ICP系列算法在三维重建、SLAM、虚拟现实等领域有着广泛的应用,能够有效地实现不同模型间的对齐与融合。
激光slam中的icp算法
激光SLAM中的ICP算法激光SLAM (Simultaneous Localization and Mapping) 是指通过激光传感器获取环境的三维信息,实现机器人在未知环境中同时实现自我定位和地图构建的算法。
其中,ICP (Iterative Closest Point) 算法是激光SLAM中最常用的配准方法之一,通过迭代优化对应点对之间的误差,来估计机器人的姿态和构建准确的地图。
本文将详细介绍激光SLAM中的ICP算法,包括算法原理、基本步骤、参数设置和优化策略等内容,以帮助读者深入了解和应用ICP算法。
1. ICP算法原理ICP算法是一种基于最小二乘法的点云配准方法,通过计算匹配点对之间的最小距离来估计机器人的位姿变换,并通过迭代优化来逼近最佳匹配结果。
算法的基本原理如下:1.初始化位姿估计:首先需要给定机器人的初始位姿估计,可以通过初始传感器读数或其他方式获得。
2.匹配点对搜索:根据当前位姿估计,将参考点云(地图)中的点变换到当前点云坐标系下,然后通过搜索找到当前点云中与参考点云最近的点作为匹配点对。
3.计算误差:根据匹配点对,计算其坐标差异,并定义为误差。
4.优化位姿估计:通过迭代优化,调整当前位姿估计,使得匹配误差最小化。
5.终止条件检查:根据设定的终止条件(如最大迭代次数或误差阈值),判断是否满足终止条件,若满足则停止迭代,否则返回第3步。
6.重复步骤2至步骤5,直到算法收敛或达到设定的迭代次数。
2. ICP算法步骤ICP算法的基本步骤如下:Step 1: 初始化位姿估计根据传感器读数或其他方式,给定机器人的初始位姿估计。
Step 2: 匹配点对搜索将参考点云变换到当前点云坐标系下,然后通过搜索找到当前点云中与参考点云最近的点作为匹配点对。
Step 3: 计算误差计算匹配点对之间的坐标差异,定义为误差。
Step 4: 优化位姿估计通过迭代优化,调整当前位姿估计,使得匹配误差最小化。
icp-20100例程
icp-20100例程
ICP (Iterative Closest Point) 算法是一种广泛用于点云配准的方法。
在2010年,David A. Fellner 和John A. Stetson 发表了一篇关于使用ICP 算法进行点云配准的教程,该教程详细描述了如何实现一个基于Python 的ICP 程序。
由于我不具备搜索特定代码的能力,所以无法提供您提到的"icp-20100例程"。
不过,如果您希望了解ICP 的基本原理和实现,我建议您参考这篇教程:David A. Fellner and John A. Stetson, "An Introduction to Iterative Closest Point Algorithms for 3D Shape Reconstruction", Tutorial Notes, Second International Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT'10), pages 513-526, 2010.
此外,开源的点云库(PCL)也提供了ICP 的实现,并提供了详细的文档和示例代码。
如果您使用的是PCL,您可以查阅其官方文档以获取更多信息。
如果您能提供更多关于"icp-20100例程" 的详细信息,我可能能提供更有针对性的帮助。
点云配准方法

点云配准方法
点云配准是指将多个不同位置、姿态或者采集设备获得的点云数据进行对齐,使其能够以相同的参考坐标系进行展示、比较或者融合。
点云配准在3D建模、机器人感知、地图构建、工业制造等领域中有广泛应用。
常见的点云配准方法包括基于特征的方法、ICP(Iterative Closest Point)方法、非刚性变换方法等。
基于特征的方法通过提取点云数据中的特征点(如角点、边缘等)进行匹配和配准。
ICP方法则是通过迭代寻找最小平方误差来优化匹配变换矩阵。
非刚性变换方法则是通过引入弹性形变模型或者局部仿射变换模型来实现点云
的配准。
在实际应用中,点云配准往往还需要考虑点云数据的噪声、缺失、离群点等问题。
因此,基于点云预处理、配准精度评估等方面的研究也非常重要。
未来随着点云采集技术和算法的不断发展,点云配准方法也将会得到更广泛的应用和更高的精度。
- 1 -。
迭代最近点法

迭代最近点法:
迭代最近点法(Iterative Closest Point,ICP)是一种用于点云配准的方法。
它的基本思想是寻找一种变换(如平移、旋转、缩放等),使得两个点云中的对应点能够最小化距离。
通过不断地迭代这个过程,直到找到最佳的变换参数,从而实现两个点云的配准。
ICP算法的基本步骤如下:
1.初始化:选择一个点云作为基准点云,另一个点云作为目标点云。
2.对应点匹配:在目标点云中为每个点找到在基准点云中最接近的点作为对应点。
3.估计变换:根据对应点的坐标,估计出平移、旋转等变换参数。
4.迭代优化:将目标点云进行变换,使其与基准点云尽可能匹配。
然后回到步骤2,重复进行对应点匹配和估计变换,直到满足收敛条件(如达到最大迭代次数或相对变化小于某个阈值)。
5.输出结果:输出最终的变换参数和配准后的目标点云。
ICP算法有很多变种,如ICP-LS(ICP with Least Squares)、Point-to-Plane ICP(P2P ICP)、Point-to-Point ICP(P3P ICP)等。
这些变种在估计变换和优化方法上有所不同,但基本思想是一致的。
ICP算法广泛应用于三维重建、机器人视觉、医学图像处理等领域。
它是一种有效的点云配准方法,能够得到较好的配准结果。
然而,ICP算法也存在一些问题,如对初始化的敏感性和容易陷入局部最优
解等。
因此,在实际应用中需要根据具体情况选择合适的算法和参数设置。
vtkiterativeclosestpointtransform 参数解释 -回复
vtkiterativeclosestpointtransform 参数解释-回复vtkIterativeClosestPointTransform 参数解释vtkIterativeClosestPointTransform 类是基于最小均方误差的点云配准算法的实现。
该算法的目标是将一个点云数据集对齐到另一个参考数据集上。
在使用vtkIterativeClosestPointTransform 类时,我们可以设置不同的参数来调整算法的性能和结果。
以下是一些常用的vtkIterativeClosestPointTransform 类参数及其解释:1. SetSource:设置源点云数据集源点云数据集是我们希望对齐的点云。
这个参数接受一个vtkPointSet 对象作为参数,可以是vtkPolyData、vtkUnstructuredGrid 或者其他类型的数据集。
2. SetTarget:设置目标点云数据集目标点云数据集是我们希望将源点云对齐到的参考点云。
和源点云一样,目标点云数据集也是一个vtkPointSet 对象。
3. GetSourceLandmarks/getTargetLandmarks:获取标记点标记点是在两个点云数据集上选择的一些特定点。
这些点用于调整对齐算法的结果,可以提供更准确的配准结果。
这两个函数分别返回源点云和目标点云上的标记点。
4. SetMaximumNumberOfIterations:设置最大迭代次数最大迭代次数指定了算法运行的最大迭代次数。
如果在达到最大迭代次数之前,算法的误差足够小,算法会提前终止。
5. SetMaximumMeanDistance:设置最大平均距离这个参数用于设置一个允许的最大平均距离。
如果两个点云之间的平均距离超过这个值,算法会停止迭代。
6. SetMaximumNumberOfLandmarks:设置最大标记点数最大标记点数指定了在迭代过程中使用的最大标记点数。
icp配准的点到面方法
icp配准的点到面方法(原创版2篇)目录(篇1)1.ICP 配准的概念与原理2.点到面方法的概述3.ICP 配准的点到面方法的具体步骤4.ICP 配准的点到面方法的优缺点5.总结正文(篇1)一、ICP 配准的概念与原理ICP(Iterative Closest Point)配准是一种广泛应用于三维重建、机器人导航和虚拟现实等领域的算法,主要通过迭代计算两个点集中最接近的点对,达到对齐两个点云数据的目的。
ICP 配准的核心思想是基于点云数据的距离最小化,其原理可以简单概括为:给定源点云数据和目标点云数据,计算两个点集中对应点的距离,通过迭代计算,使得源点云数据与目标点云数据的距离最小。
二、点到面方法的概述点到面方法是一种基于局部特征的配准方法,其基本思想是将源点云数据中的每个点与目标点云数据中的所有面进行匹配,从而找到最优的配准结果。
点到面方法在 ICP 配准中具有较高的计算效率,适用于大规模点云数据的配准。
三、ICP 配准的点到面方法的具体步骤1.预处理:对源点云数据和目标点云数据进行预处理,包括去除噪声、采样等操作,以提高配准精度。
2.特征提取:对预处理后的点云数据进行特征提取,生成点云数据的局部特征表示。
常用的特征提取方法有法向量、高斯分布等。
3.点到面匹配:根据源点云数据的局部特征,在目标点云数据中寻找与之匹配的面。
匹配过程中,可以通过计算点与面的距离,筛选出最有可能的匹配面。
4.迭代优化:根据点到面匹配的结果,计算源点云数据与目标点云数据之间的变换矩阵,并根据迭代终止条件,决定是否继续迭代。
迭代过程中,可以通过增加迭代次数、减小变换矩阵的更新范围等策略,提高配准精度。
5.结果输出:得到最终的配准结果,包括源点云数据与目标点云数据之间的变换矩阵和残差等信息。
四、ICP 配准的点到面方法的优缺点优点:1.计算效率高:点到面方法基于局部特征,可以显著降低计算复杂度,提高配准速度。
2.鲁棒性强:点到面方法对点云数据的噪声和局部结构变化具有较好的容错性,可以在一定程度上提高配准精度。
ndt算法原理
ndt算法原理
NDT(Normal Distributions Transform)算法是一种基于概率的点云配准方法,用于将两个或多个点云进行对齐,其原理主要是将点云转换成概率密度函数,然后通过最大化概率密度函数之间的匹配,得到点云之间的对应关系。
具体而言,NDT算法在配准时首先将每个点云离散化成一个网格地图,然后以每个网格为中心计算局部概率密度函数,这里通常使用高斯分布函数来描述每个网格内点云的分布情况。
然后将一个点云的每个点都映射到另一个点云的网格地图上,对于每个点,计算其在目标网格地图上的局部概率密度函数,然后通过最小化两个概率密度函数之间的距离来确定它们之间的对应关系。
为了实现这个过程,NDT算法使用了一种称为ICP(Iterative Closest Point)的优化方法,它通过不断的迭代,来改善点云之间的匹配结果。
在每次迭代中,NDT算法将点云中的每个点与目标点云中最近的点进行匹配,并根据匹配结果更新点云的位置和姿态。
这个过程不断迭代,直到点云之间的误差足够小,达到收敛条件为止。
总体而言,NDT算法是一种高效且准确的点云配准方法,适用于多种不同的应用场景,如自动驾驶、机器人导航等。
其能够快速地将多个
点云对齐,提高点云处理的效率和准确性,对于点云处理和三维重建领域有着广泛的应用。
pcl gicp退化原理 -回复
pcl gicp退化原理-回复GICP(Generalized Iterative Closest Point)是一种用于点云配准的算法。
它是为了解决传统ICP算法(Iterative Closest Point)在应对点云带有高度噪声和部分遮挡等问题时的退化而提出的。
传统的ICP算法通过寻找两个点云间的最小化误差来实现配准。
它的基本原理是通过迭代调整旋转矩阵和平移向量来使得两个点云之间的距离最小化。
ICP算法在处理理想情况下的点云匹配问题时表现良好,但是在面对现实世界中包含噪声、部分遮挡和非刚性变形等复杂情况时,往往会退化成为局部最优解。
GICP算法通过引入一种应对点云间的非刚性变形的能力,从而克服了传统ICP算法的退化问题。
GICP算法的基本思想是将点云配准问题转化为一个非线性最小二乘问题,并通过迭代优化方法来求解最优解。
首先,我们需要将原始的点云通过某种手段进行预处理,以去除噪声或冗余数据。
这可以通过滤波方法,如高斯滤波或统计滤波,来实现。
滤波后的点云可以提供更加可靠的配准结果。
然后,我们需要建立起点云之间的对应关系。
在传统ICP算法中,对应点是通过在两个点云中搜索最近邻点来确定的。
然而在GICP算法中,对应点的搜索范围不限于最近邻点,而是通过引入一种全局搜索方法来获取更准确的对应点。
这个全局搜索方法可以是一种特征提取方法,如SIFT (Scale Invariant Feature Transform)或FPFH(Fast Point Feature Histogram),因为这些方法可以提取到点云的局部特征,并且对噪声和遮挡具有一定的鲁棒性。
接下来,在获得对应点之后,我们可以采用ICP算法的核心部分——最小二乘法来计算旋转矩阵和平移向量的更新值。
然而,不同于传统ICP算法,GICP算法引入了一种配准误差的权重,这是为了应对不同区域的误差大小不同的情况。
这种误差权重可以通过配准误差的马氏距离来计算。
ICP系列算法的描述与对比

ICP系列算法的描述与对比1. 引言1.1 ICP系列算法简介ICP(Iterative Closest Point)系列算法是一种常用的点云配准算法,在计算机视觉和机器人领域有着广泛的应用。
ICP算法通过迭代优化的方式,将两个或多个点云数据集之间的相似性最大化,从而实现点云的配准和重建等任务。
ICP系列算法包括传统的ICP算法、带有距离加权的ICP算法、多尺度ICP算法、快速ICP算法以及基于特征的ICP算法等。
这些算法在不同的场景和应用中展现出不同的优势和特点。
ICP系列算法的基本原理是通过最小化两个点云之间的距离度量来优化点云的配准。
算法首先寻找对应点对,然后通过最小二乘法计算出最优的转换矩阵,使得两个点云之间的误差最小化。
通过多次迭代,算法逐渐收敛并得到最优的配准结果。
ICP系列算法是一种简单有效的点云配准方法,具有较高的准确性和鲁棒性,适用于各种不同的点云配准任务。
在接下来的正文中,我们将详细介绍ICP算法的原理、变种算法、优缺点以及与其他算法的对比。
2. 正文2.1 ICP算法原理ICP算法原理是一种基于点云配准的算法,主要用于解决点云数据之间的配准和对齐问题。
其基本原理是通过最小化点云之间的均方误差来找到最佳的刚性变换矩阵,从而使得两个点云能够最好地重叠在一起。
ICP算法的核心步骤包括:初始化,点云匹配,计算最优变换矩阵,更新点云位置。
在初始化阶段,通常会随机选择一些点作为初始对应关系。
然后在点云匹配阶段,利用最近点匹配的方法来找到两个点云之间的对应关系。
接着,通过最小化点云之间的距离来计算最优的刚性变换矩阵,通常采用迭代的方式来优化这个过程。
更新点云的位置,重复以上步骤直到收敛。
ICP算法的关键优势在于其简单直观的原理和易于实现的特点,同时在许多实际应用中取得了较好的效果。
ICP算法也存在一些缺点,比如对初始对应关系的敏感性、对局部最优解的问题以及计算复杂度较高等。
ICP算法在点云配准领域有着重要的应用,但也需要结合实际问题的特点选择合适的变体算法来提高其性能。
ICP算法——精选推荐
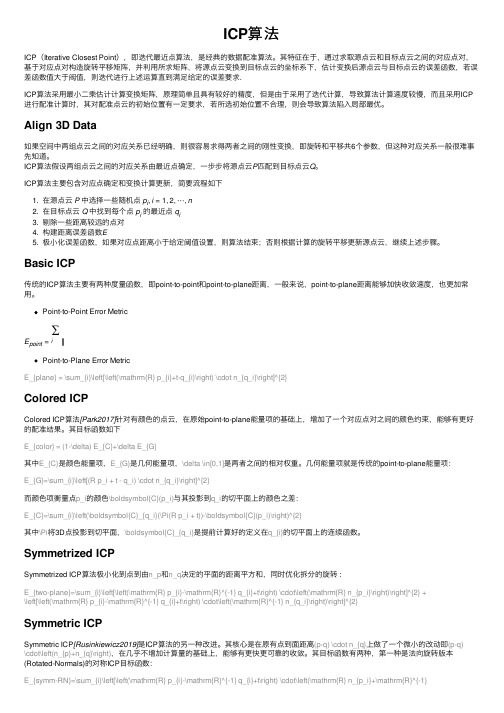
ICP算法ICP(Iterative Closest Point),即迭代最近点算法,是经典的数据配准算法。
其特征在于,通过求取源点云和⽬标点云之间的对应点对,基于对应点对构造旋转平移矩阵,并利⽤所求矩阵,将源点云变换到⽬标点云的坐标系下,估计变换后源点云与⽬标点云的误差函数,若误差函数值⼤于阀值,则迭代进⾏上述运算直到满⾜给定的误差要求.ICP算法采⽤最⼩⼆乘估计计算变换矩阵,原理简单且具有较好的精度,但是由于采⽤了迭代计算,导致算法计算速度较慢,⽽且采⽤ICP 进⾏配准计算时,其对配准点云的初始位置有⼀定要求,若所选初始位置不合理,则会导致算法陷⼊局部最优。
Align 3D Data如果空间中两组点云之间的对应关系已经明确,则很容易求得两者之间的刚性变换,即旋转和平移共6个参数,但这种对应关系⼀般很难事先知道。
ICP算法假设两组点云之间的对应关系由最近点确定,⼀步步将源点云P匹配到⽬标点云Q。
ICP算法主要包含对应点确定和变换计算更新,简要流程如下1. 在源点云P中选择⼀些随机点p i,i=1,2,⋯,n2. 在⽬标点云Q中找到每个点p i的最近点q i3. 剔除⼀些距离较远的点对4. 构建距离误差函数E5. 极⼩化误差函数,如果对应点距离⼩于给定阈值设置,则算法结束;否则根据计算的旋转平移更新源点云,继续上述步骤。
Basic ICP传统的ICP算法主要有两种度量函数,即point-to-point和point-to-plane距离,⼀般来说,point-to-plane距离能够加快收敛速度,也更加常⽤。
Point-to-Point Error MetricE point=∑i‖Point-to-Plane Error MetricE_{plane} = \sum_{i}\left[\left(\mathrm{R} p_{i}+t-q_{i}\right) \cdot n_{q_i}\right]^{2}Colored ICPColored ICP算法[Park2017]针对有颜⾊的点云,在原始point-to-plane能量项的基础上,增加了⼀个对应点对之间的颜⾊约束,能够有更好的配准结果。
面部特征点的提取算法
面部特征点的提取算法
面部特征点的提取算法有多种,下面列举几种常见的算法:
1. HoG特征结合SVM分类器:通过计算图像的梯度直方图(HoG)来提取面部特征,然后使用支持向量机(SVM)进行分类,找到人脸区域和特征点位置。
2. 级联AdaBoost算法:通过级联的强分类器来进行人脸检测和特征点定位。
首先使用强分类器来筛选出可能的人脸区域,然后在这些区域中利用特征点模型来定位面部特征点。
3. Active Shape Model (ASM):通过训练样本集合来学习人脸的形状模型,然后利用这个模型来对新的人脸图像进行特征点的定位。
4. 迭代最近点算法(Iterative Closest Point, ICP):通过将3D 模型和2D图像匹配来进行人脸特征点定位。
首先将3D模型投影到2D图像上,然后通过ICP算法不断迭代优化,找到最佳的特征点位置。
以上只是一些常见的面部特征点提取算法,实际上还有很多其他算法和方法,如基于深度学习的方法、活体识别等。
具体选择哪种算法要根据具体应用场景和需求来决定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Optimizing the Algorithm
Optimizing the Algorithm
Optimizing the Algorithm
Optimizing the Algorithm
Optimizing the K-D Tree :
We choose in each internal node the key with the largest spread values as the discriminator and the median as the partition value.
d ( s, M ) min d m s
mM
Finding Matches
d ( s, M ) min d m s d ( s, y )
mM
yM Y C (S , M ) Y M
C – the closest point operator Y – the set of closest points to S
Converges if starting position “close enough“
Closest Point
Given 2 points r1 and r2 , the Euclidean distance is:
d (r1 , r2 ) r1 r2 ( x1 x2 ) 2 ( y1 y2 ) 2 ( z1 z2 ) 2
Convergence Theorem
The ICP algorithm always converges monotonically to a local minimum with respect to the MSE distance objective function.
Convergence Theorem
Motivation: In each internal node we can exclude the sub K-D tree if the distance to the partition is greater than the ball radius . Adjusting the discriminating number, the partition value , and the number of records in each bucket.
Snew rot(S ) trans
The Algorithm
Init the error to ∞
Y = CP(M,S),e (rot,trans,d)
S`= rot(S)+trans
Calculate correspondence
Calculate alignment
Apply alignment Update error
d` = d
If error > threshold
The Algorithm
function ICP(Scene,Model) begin E` + ∞; (Rot,Trans) In Initialize-Alignment(Scene,Model); repeat E E`; Aligned-Scene Apply-Alignment(Scene,Rot,Trans); Pairs Return-Closest-Pairs(Aligned-Scene,Model); (Rot,Trans,E`) Update-Alignment(Scene,Model,Pairs,Rot,Trans); Until |E`- E| < Threshold return (Rot,Trans); end
Motivation
Shape inspection Motion estimation Appearance analysis Texture Mapping Tracking
Motivation
Range images registration
Motivation
Range images registration
C. Updating the scene: O(NS)
Optimizing the Algorithm
The best match/nearest neighbor problem :
Given N records each described by K real values (attributes) , and a dissimilarity measure D , find the m records closest to a query record.
Aligning 3D Data
If correct correspondences are known, can find correct relative rotation/translation
Aligning 3D Data
How to find correspondences: User input? Feature detection? Signatures? Alternative: assume closest points correspond
Optimizing the Algorithm
K-D Tree :
Construction time: O(knlogn) Space: O(n) Region Query : O(n1-1/k+k )
Optimizing the Algorithm
Optimizing the K-D Tree :
Iterative Closest Point
Ronen Gvili
The Problem
Align two partiallyoverlapping meshes given initial guess for relative transform
Data Types
Point sets Line segment sets (polylines) Implicit curves : f(x,y,z) = 0 Parametric curves : (x(u),y(u),z(u)) Triangle sets (meshes) Implicit surfaces : s(x,y,z) = 0 Parametric surfaces (x(u,v),y(u,v),z(u,v)))
Given a point r1 and set of points A , the Euclidean distance is:
d (r1 , A) min d (r1 , ai )
i1..n
Finding Matches
The scene shape S is aligned to be in the best alignment with the model shape M. The distance of each point s of the scene from the model is :
The Optimized K-D Tree :
The algorithm can use the m-closest points to cache potentially closest points.
Optimizing the Algorithm
As the ICP algorithm proceeds a sequence of vectors is generated : q1, q2, q3, q4 …
1 dk NM
y
i 1
NM
ik
Sik
2
Convergence Theorem
Proof : After the last alignment, the closest point operator is applied : Yk 1 C(M , Sk 1 ) It is clear that:
Range Scanners
Aligning 3D Data
Corresponding Point Set Alignment
Let M be a model point set. Let S be a scene point set.
We assume : 1. NM = NS. 2. Each point Si correspond to Mi .
Corresponding Point Set Alignment
The MSE objective function :
1 f ( R, T ) NS 1 f (q) NS
i 1
NS
mi Rot( si ) Trans
2
2
i 1
NS
mi R(qR ) si qT
The alignment is : (rot, trans, dmse ) (M , S )
Correspondence error :
1 ek NS
y
i 1
NS
ik
sik
2
Alignment error:
1 dk NS
y
i 1
NS
ik
Rotk (sio ) Transk
2
Convergence Theorem
Ek Dk
S`= rot(S)+trans
Calculate correspondence
i 1
NS
yik sik