新型阿帕奇武装直升飞机产品说明书
迷你“阿帕奇” 波音AH-6i武装直升机

迷你“阿帕奇” 波音AH-6i武装直升机文/温杰2011年11月13日,盛况空前的第12届迪拜国际航空展隆重开幕。
为了抢占中东市场,美国波音公司派出了强大的参展阵容,全面展示和推销各种民用客机和军用飞机,其中尤为引人注目的是AH-6i武装直升机的现场飞行表演,充分展现了机敏的飞行性能和强大的攻击火力,旨在尽快寻找到启动用户。
衍生平台应运而生AH-6i直升机的“血脉”可以追溯到20世纪60年代初,当时休斯直升机公司设计的369原型机成功赢得了美国陆军轻型侦察直升机计划,并被命名为OH-6A型,绰号“印第安小种马”(Cayuse)。
它凭借小巧的结构尺寸和较低的噪声水平,显示出独特的战术优势,在越南战争中完成了空中观测、目标识别、指挥与控制等任务,表现不俗。
后来,该机进行了几个批次的改进,并被麦道公司命名为MD500“防御者”,在世界上销售了471架。
期间,它还成为美国陆军特种作战部队执行秘密任务的理想平台,先后衍生发展出AH-6系列和MH-6系列,分别用于火力攻击和突击运输任务,最后统称为AH/MH-6直升机,因作战响应迅速和飞行动作敏捷被形象地喻为“小鸟”(Little Bird)。
这个非官方的名字已经被广泛接受。
2004年,波音公司针对美国陆军新一代武装侦察直升机(ARH)计划的投标要求,提出了“任务增强型小鸟”(MELB)投标方案。
但是,由于“小鸟”直升机是一种相对较小的平台,不仅缺乏先进瞄准系统,还存在火力不足的致命缺陷,最终在2005年7月惜败于贝尔公司的贝尔407改装方案。
此后,波音公司并未气馁,而是针对“小鸟”的先天不足,进一步加大改进力度,期望借助于MELB方案重整旗鼓。
时隔两年后,ARH-70项目因成本超支和进度延迟,陷入了麻烦之中。
波音公司似乎看到了一线生机,于是在2007年5月提出用AH-6M替代ARH-70A的建议。
2008年,五角大楼决定终止ARH-70A直升机的研制工作,而伊拉克政府也在此时寻求从美国购买24架武装直升机,以加强自身武装力量建设。
AH1武装直升机..
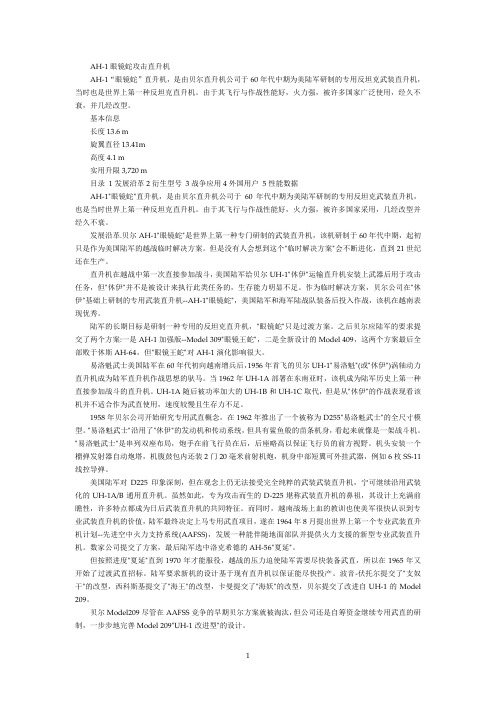
AH-1眼镜蛇攻击直升机AH-1“眼镜蛇”直升机,是由贝尔直升机公司于60年代中期为美陆军研制的专用反坦克武装直升机,当时也是世界上第一种反坦克直升机。
由于其飞行与作战性能好,火力强,被许多国家广泛使用,经久不衰,并几经改型。
基本信息长度13.6 m旋翼直径13.41m高度4.1 m实用升限3,720 m目录1发展沿革2衍生型号3战争应用4外国用户5性能数据AH-1"眼镜蛇"直升机,是由贝尔直升机公司于60年代中期为美陆军研制的专用反坦克武装直升机,也是当时世界上第一种反坦克直升机。
由于其飞行与作战性能好,火力强,被许多国家采用,几经改型并经久不衰。
发展沿革.贝尔AH-1"眼镜蛇"是世界上第一种专门研制的武装直升机,该机研制于60年代中期,起初只是作为美国陆军的越战临时解决方案。
但是没有人会想到这个"临时解决方案"会不断进化,直到21世纪还在生产。
直升机在越战中第一次直接参加战斗,美国陆军给贝尔UH-1"休伊"运输直升机安装上武器后用于攻击任务,但"休伊"并不是被设计来执行此类任务的,生存能力明显不足。
作为临时解决方案,贝尔公司在"休伊"基础上研制的专用武装直升机--AH-1"眼镜蛇",美国陆军和海军陆战队装备后投入作战,该机在越南表现优秀。
陆军的长期目标是研制一种专用的反坦克直升机,"眼镜蛇"只是过渡方案。
之后贝尔应陆军的要求提交了两个方案:一是AH-1加强版--Model 309"眼镜王蛇",二是全新设计的Model 409,这两个方案最后全部败于休斯AH-64,但"眼镜王蛇"对AH-1演化影响很大。
易洛魁武士美国陆军在60年代初向越南增兵后,1956年首飞的贝尔UH-1"易洛魁"(或"休伊")涡轴动力直升机成为陆军直升机作战思想的驮马。
解放军武直-10或出口外销 部分指标抗衡阿帕奇
解放军武直-10或出口外销部分指标抗衡阿帕奇武装直升机是现代化陆军航空兵成为具备攻击力作战力量的基础,我国已掌握第三代直升机研制核心技术。
自武直-10、武直-19在去年珠海航展上进行飞行表演后,引起了较大的国际关注。
航空产业作为高技术、高投资产业,市场前景是空前广阔的。
目前,中国军机出口已面向亚、非、拉美市场。
武直-10副总设计师吴承发在日前透露,未来武直-10将会出口外销。
部分指标抗衡阿帕奇2012年11月11日,珠海航展上一架隶属广州军区陆航部队的武直-10进入珠海三灶机场上空,在飞行中做出了倒飞、莱维斯曼等动作。
武装直升机是未来战场上对敌方坦克集群、前沿阵地、工事以及有生目标实施有效打击的主力装备。
国防大学军事后勤与军事科技装备教研部教授李大光告诉南方日报记者,局部战争证明,武装直升机是对付敌方坦克最有效的“空中杀手”,也是最能有效直接支援己方地面部队的利器,发达国家军队都建立了规模庞大的陆军航空兵。
上世纪30年代,美国西科斯基发明的直升机问世后,很快便用于战争,主要担负战场浅近后方的运输任务。
60年代越南战争期间,美国首次组建了主要装备直升机的“第一空中骑兵师”,开辟了陆战场上立体作战的新时代。
号称“坦克杀手”的武装直升机,过去一直被西方认为是解放军装备中的“软肋”。
而武直-10副总设计师吴承发指出,自从直-10武装直升机服役后,这一说法已不再成立。
中国直升机研制能力已接近世界先进水平,武直-10技术先进,综合作战能力强大,在各国使用的同类直升机中可排进前三名。
世界范围内的明星武装直升机有美国的阿帕奇,俄罗斯的卡50/52和米28N,可谓三足鼎立。
而武直-10的综合性能非常先进。
《简氏防务周刊》、《纽约时报》曾评论称,武直-10是目前世界上最先进的武装直升机之一,甚至可媲美欧洲的虎式直升机及美军的阿帕奇直升机。
在李大光看来,阿帕奇并没那么完美。
在伊拉克战争中,阿帕奇就曾因为当地的风沙大等复杂气候,造成其发动机磨损加重,影响出勤率。
新型阿帕奇武装直升飞机产品说明书

新型阿帕奇武装直升飞机产品说明书一:直升飞机照片。
二:作品简介。
该直升飞机模型原型是阿帕奇武装直升飞机。
跟M1艾布拉姆斯坦克一样,阿帕奇直升机也是从一项本来被取消的计划中救活的,这项计划就是洛克希德公司的AH-56“夏安”。
“夏安”的性能表现主要着重于高速度,而非灵巧与隐秘性。
AHAH-64长弓阿帕奇武装直升机 (6张)-56外型像只愤怒的蜂鸟,是模仿第二次世界大战前苏联的IL-2“突袭战士”制造的。
“突袭战士”是装甲俯冲轰炸机,主要是用来对付坦克的,它机上的两门23毫米炮,可以炸掉大部分纳粹装甲车的车顶装甲。
有些“突袭战士”甚至创下摧毁几百辆坦克的纪录。
除了主要的旋转翼,“夏安”机尾还装有推进螺旋桨和短短的机翼,以便增加它的速度(时速超过300英里/480公里。
对螺旋桨飞机来说,这已经是相当快了)。
阿帕奇的主要作用是高速向着目标俯冲而下,同时混合使用TOW式导弹(这是第一架使用TOW式导弹的直升机)、2.75英寸/70毫米火箭和20毫米的机炮攻击目标。
我们的作品是先通过creo三维软件建模,再根据图纸尺寸制作的。
1)装配图。
2)零件图。
(机身)(上机翼)(火箭巢)(尾翼)三:制作过程。
1)在网上、图书馆里面查找了关于空气动力学、螺旋桨、飞机机身结构等方面的资料。
2)根据我们所查找的知识,借助于软体Creo2.0做三维模型建模3)根据建模好的模型,我们就开始开始实体制作了。
实体的制作我们是采用了从下到上、从里到外,从主体机架到局部零件的制作原则。
(乐博尔与汤奇良画机身)(刘京南制作螺旋桨)(刘少辉与汤奇良裁pvc板)四:直升飞机工作原理。
1. 概况与普通飞机相比,直升机不仅在外形上,而且在飞行原理上都有所不同。
一般来讲它没有固定的机翼和尾翼,主要靠旋翼来产生气动力。
这里所说的气动力既包括使机体悬停和举升的升力,也包括使机体向前后左右各个方向运动的驱动力。
直升机旋翼的桨叶剖面由翼型构成,叶片平面形状细长,相当于一个大展弦比的梯形机翼,当它以一定迎角和速度相对于空气运动时,就产生了气动力。
阿帕奇攻击直升机共25页

波音公司研制生产AH-64D长弓阿帕奇攻击直升机。
美国《国防》月刊4月号文章,“科曼奇”项目的阴影困扰新型直升机的研制工作,美国陆军航空部队官员想要一批新型直升机———不是现在,而是20年后。
20年听起来好像很漫长,但对陆军旋翼飞机的研制工作来说其实并不算长。
美国陆军航空部队指挥官安东尼·克拉奇菲尔德准将说,陆军航空部队需要在2030年研制出新型旋翼飞机,这项工作必须尽快启动。
他在美国陆军协会航空研讨会上说:“我可不希望我的孙子仍在驾驶UH-60‘祖鲁人’直升机。
”AH-64“阿帕奇”直升机和UH-60“黑鹰”直升机的服役期将在2040年左右结束,而CH-47“奇努克”直升机和OH-58“基奥瓦勇士”直升机,将分别于2035年和2025年退役。
克拉奇菲尔德说:“当它们全都退役时,我们手头必须准备好替代品。
”他说,研制出新型直升机取代这四种机型的最后期限是2030年。
这四种直升机的机身设计最早可以追溯到50年前,使用的还是通常所说的“越战”技术。
直升机专家说,目前的问题在于,美国陆军并没有将资金投入到新一代垂直起降飞机所需的尖端技术中。
克拉奇菲尔德说,新型直升机项目以往面临的难题一直是技术以及军方在漫长研制过程中不断变化的要求。
在研制周期中加入新要求常常导致项目失败。
被取消的“科曼奇”项目就是一个实例。
这个项目历时22年,只研制出两架原型机。
克拉奇菲尔德指出,上世纪50年代研制的“休伊”直升机从提出概念到交货用了8年时间。
他还说,仅仅给这个项目命名为“科曼奇”就用了8年时间。
陆军航空部队前项目主管保罗·博戈西安说,除非增加当前对旋翼式飞机研发工作的投入,否则陆军航空部队将完全不知道他们能够从下一代直升机身上得到什么。
原本用于“科曼奇”项目的资金被投入到新型常规直升机技术中,这些技术后来被应用到“奇努克”、“黑鹰”和“阿帕奇”直升机上。
蒂尔集团公司负责分析工作的副总裁理查德·阿布拉菲亚说:“直升机的采购经费多得惊人,而直升机的新技术和研制经费则几乎不存在。
美制最新型AH-1Z攻击直升机揭秘
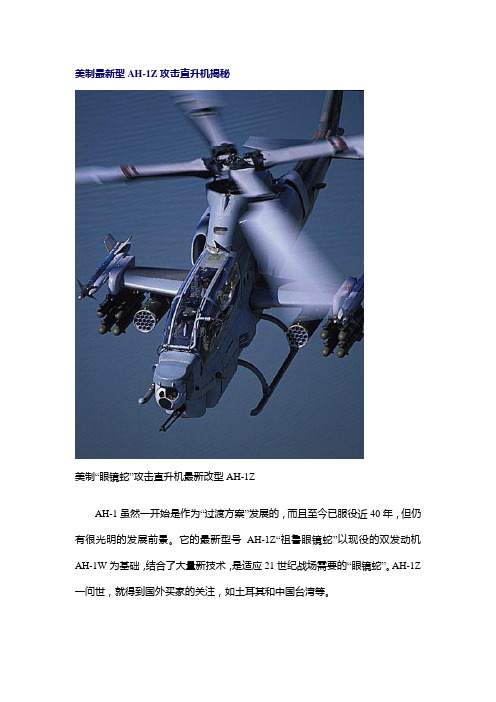
美制最新型AH-1Z攻击直升机揭秘美制“眼镜蛇”攻击直升机最新改型AH-1ZAH-1虽然一开始是作为“过渡方案”发展的,而且至今已服役近40年,但仍有很光明的发展前景。
它的最新型号AH-1Z“祖鲁眼镜蛇”以现役的双发动机AH-1W为基础,结合了大量新技术,是适应21世纪战场需要的“眼镜蛇”。
AH-1Z 一问世,就得到国外买家的关注,如土耳其和中国台湾等。
AH-1Z与AH-1W相比,在旋翼、航空电子、动力等方面进行了大范围的改进,尤其是航电系统已经达到世界先进水平,不可同日而语;与AH-64D“长弓阿帕奇”相比,则有过之而无不及。
但海军陆战队仍称AH-1Z为“超眼镜蛇”。
AH-1Z直升机能够携带更多的武器和负载,将是一型更有效的作战平台。
机上的传感器更先进,对气候的依赖性大大减小,因此能在更远的距离外识别敌方目标,打击更多目标。
AH-1Z有比AH-1W先进得多的座舱设计。
前后驾驶舱各安装2台大型多功能平面显示器,取消了AH-1W原有的头戴式显示器;2名乘员都备有先进的数字头盔显示瞄准系统,相关的飞行,火控资料投射在乘员的头盔面罩上。
AH-1Z的改进过程1979年12月,贝尔公司把AH-1S的2叶片旋翼系统换成4叶片旋翼系统而成的“眼镜蛇”II原型机(“贝尔-249”)首次试飞,并在翌年的英国范堡罗航展上初次露面。
除此,“眼镜蛇II”还计划改进发动机,并装备一套全新的瞄准系统,具备“海尔法”导弹发射能力。
贝尔公司曾建议将这些改进内容加入当时的AH-1S 升级计划中,但美国陆军决定在“轻型直升机实验计划”中实现这些改进,后来该计划推出了RAH-66“科曼奇”直升机(已经于2004年终止发展)。
陆军曾向贝尔公司提出改进“眼镜蛇”以满足其“先进侦察直升机”需求,但该项需求最后被OH-58D直升机抢走。
后来的“眼镜蛇2000”提案已涉及AH-1Z的一些关键设计,例如T700发动机和四叶片旋翼系统。
海军陆战队也被“眼镜蛇2000”提案吸引,可惜他们未获得该项目的预算。
RAH-66
RAH-66“科曼奇”侦察攻击直升机1991年1月17日凌晨,在中东沙漠某处,睡梦中的伊拉克士兵被由远而近的怒吼声惊醒。
抬头一看,6个快如闪电的黑影正从头上掠过,他们忙不迭地向黑影送去一排排子弹,但黑影迅即隐没在黑暗的天际,只留下伊拉克士兵面面相觑。
这些低空飞掠的黑影不是什么怪物,而是关掉了所有航行灯、保持无线电静默,以15m高度飞行的6架美军AH-64A"阿帕奇"攻击直升机。
不久,它们抵达目标区,射出10枚导弹,摧毁了伊境内一处预警雷达站与相关设施,打响了多国部队"沙漠风暴"行动的第一枪。
上面介绍的主角──"阿帕奇"直升机与本文要讨论的RAH-66"科曼奇"隐身侦察攻击直升机似乎没有太大的关系。
但试想一想,若上述任务由RAH-66来执行,将会出现什么样的场景呢?负责地面作战的美军地面部队,若能拥有RAH-66直升机来执行武装侦察任务,又能获得什么样的益处呢?发展起源1982年,美国陆军根据AH-1装直升机和OH-6侦察直升机在越南战场上的作战经验以及在这场战争中损失直升机高达2587架的惨痛教训,决心研制一种代替上述机型的"轻型侦察攻击直升机"。
1988年正式公布研制计划并公开招标。
由于美国陆军的需求数量庞大,要求的技术性能又很高,竞标厂商为了分摊发展风险,决定两两组合为两个竞争小组──波音/西科斯基和贝尔/麦道。
两种不同的设计方案均采用全复合材料机身,主旋翼为结构大幅简化的无铰接轴承旋翼。
两种方案在外形上最大的不同是机尾。
贝尔/麦道推出的是无尾旋翼设计,而波音/西科斯基开始并未对尾旋翼作特殊处理,后来,在设计过程中为了提高偏航扭矩以增加直升机旋转速度,重新设计了涵道式尾桨。
1991年4月5日,美国陆军选择由波音防卫/太空集团的直升机部门与西科斯基直升机部门领衔的设计小组为新型直升机的主承包商。
日本产AH-64DJ长弓阿帕奇直升机
日本产AH-64DJ长弓阿帕奇直升机日本防卫厅于2001年8月27日声明,日本已经选择美国波音公司的AH-64D 阿帕奇攻击直升机装备陆上自卫队。
日本将在今后4年采购10架阿帕奇直升机,这是2001~2005年“五年中期防卫计划”的一部分。
开始的几架飞机在波音公司梅萨厂生产,其余的将在日本生产,日本陆上自卫队的最终目标是装备60架AH-64D阿帕奇直升机。
日本防卫厅(JDA)27日表示,日本已经选择波音公司的AH-64D“阿帕奇-长弓”攻击直升机来装备其地面部队,贝尔直升机Textron公司的AH-1Z“眼镜蛇”在此次竞标中落选。
防务厅在声明中称,AH-64D直升机将作为2001至2005年中期防务计划的一部分。
日本在未来4年内仅采购10架“阿帕奇”直升机。
日本将以商业直销的方式购入一部分战机,其余将由日本富士重工株式会社以许可证的方式生产。
日本方面最终将总共采购约60架“阿帕奇”直升机。
波音公司拒绝对“阿帕奇”直升机的获选做出评论。
此前富士重工曾以贝尔公司的生产许可证制造出89架AH-1S攻击直升机,于去年完成此种机型最后一架直升机的生产。
根据JDA的声明,日本决定购买“阿帕奇”的部分原因是由于部分装备有“长弓”雷达的60架“阿帕奇”飞行编队所需费用要少于:80架装备有基于“长弓”雷达的“眼镜蛇”雷达系统AH-1Z飞行编队;70架“阿帕奇长弓”飞机编队;或不配置“长弓”雷达的80架AH-64D飞机编队。
“长弓”和“眼镜蛇”雷达由洛克西德-马丁公司与诺斯罗普-格鲁曼公司联合生产。
贝尔公司还向韩国提供其带有“眼镜蛇”雷达系统的AH-1Z直升机,以此来同波音公司的“阿帕奇”战机竞争18亿美元的合同。
波音公司此次获胜使日本成为购入“阿帕奇”战机的第二个亚洲国家。
新加坡政府上周曾表示打算将其AH-64D编队计划扩充至20架战机。
自2002年起,日本开始从波音公司采购这款直升机,当时每架的价格只有60亿日元(约合5400万美元)。
阿帕奇直升机工作原理
阿帕奇直升机工作原理阿帕奇直升机是战争史上的一次革命。
它就像一部飞翔的坦克——一架能够抵御猛烈的攻击并重创对手的直升机。
无论白天还是晚上,无论天气条件多么恶劣,它都能瞄准特定目标。
它是一种令地面部队望而生畏的武器。
本文将介绍阿帕奇那令人称奇的飞行系统、武器系统、传感器系统以及装甲系统。
分开来看,每个系统都属于尖端技术。
而当它们组合在一起时,就构成了一件难以置信的武器——迄今为止最具杀伤力的直升机。
就其核心功能来说,阿帕奇和其他任何直升机的工作方式几乎一样:有两个螺旋桨,带动多个桨叶旋转;桨叶像飞机的机翼一样翘起;螺旋桨旋转时,桨叶产生上升力(要了解上升力是如何产生的,请参见飞机如何飞上蓝天)。
主螺旋桨位于直升机顶部,带动4个约6米长的桨叶旋转。
飞行员通过调整旋转斜盘来操纵直升机。
旋转斜板通过改变桨叶的姿态角(倾斜角度)来增加上升力。
均匀地调整所有桨叶的姿态角可使直升机垂直升降。
当浆叶旋转起来后改变姿态角可以产生不均匀的上升力,从而使直升机沿特定方向侧飞。
在主螺旋桨旋转时,会给整个直升机施加一种旋转力。
尾部螺旋桨桨叶产生抗拒力,从而将尾桁推向相反方向。
通过改变尾部螺旋桨桨叶的迎角,飞行员可以让直升机向任意方向旋转或根本不让它转向。
而阿帕奇有两个尾部螺旋桨,每个螺旋桨有两个桨叶。
美国国防部供图AH-64A阿帕奇直升机上的螺旋桨装置最新的阿帕奇直升机装备有两个通用电气T700-GE-701C涡轮轴引擎,每个引擎的功率大约为1,700马力(1249.5千瓦,1马力=0.735千瓦),分别驱动一个传动轴,而传动轴和一个简单的传动箱相连接。
传动箱将旋转角度改变大约90度并将动力传递给传动装置。
传动装置将动力传递给主螺旋桨和通向尾部螺旋桨的一根长轴。
螺旋桨已经过优化,可以提供普通直升机所不具备的高灵活性。
桨叶的核心结构由五个称为“桁条”的不锈钢臂组成,由一个玻璃纤维骨架包裹着。
每个桨叶的后缘都覆盖有坚硬的石墨合成材料,前缘由钛制成。
阿帕奇:树梢上的坦克杀手
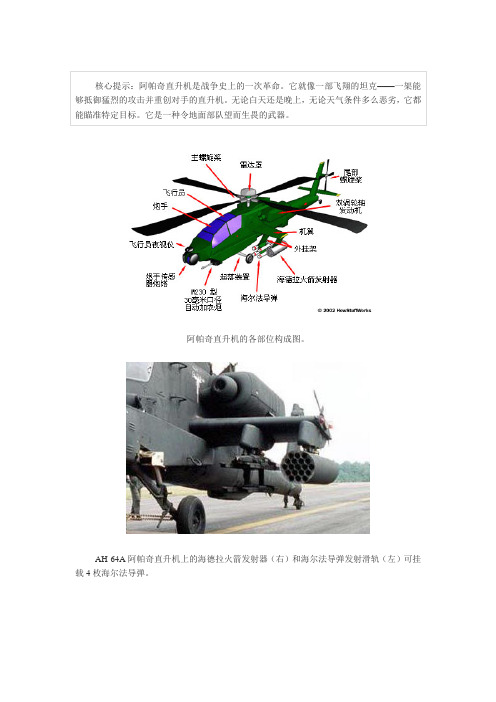
阿帕奇直升机的各部位构成图。
AH-64A阿帕奇直升机上的海德拉火箭发射器(右)和海尔法导弹发射滑轨(左)可挂载4枚海尔法导弹。
AH-64A阿帕奇上的M-230A1型30毫米口径自动机关炮。
阿帕奇直升机是战争史上的一次革命。
它就像一部飞翔的坦克——一架能够抵御猛烈的攻击并重创对手的直升机。
无论白天还是晚上,无论天气条件多么恶劣,它都能瞄准特定目标。
它是一种令地面部队望而生畏的武器。
本文将介绍阿帕奇那令人称奇的飞行系统、武器系统、传感器系统以及装甲系统。
分开来看,每个系统都属于尖端技术。
而当它们组合在一起时,就构成了一件难以置信的武器——迄今为止最具杀伤力的直升机。
就其核心功能来说,阿帕奇和其他任何直升机的工作方式几乎一样:有两个螺旋桨,带动多个桨叶旋转;桨叶像飞机的机翼一样翘起;螺旋桨旋转时,桨叶产生上升力(要了解上升力是如何产生的,请参见飞机如何飞上蓝天)。
阿帕奇直升机工作原理主螺旋桨位于直升机顶部,带动4个约6米长的桨叶旋转。
飞行员通过调整旋转斜盘来操纵直升机。
旋转斜板通过改变桨叶的姿态角(倾斜角度)来增加上升力。
均匀地调整所有桨叶的姿态角可使直升机垂直升降。
当浆叶旋转起来后改变姿态角可以产生不均匀的上升力,从而使直升机沿特定方向侧飞。
在主螺旋桨旋转时,会给整个直升机施加一种旋转力。
尾部螺旋桨桨叶产生抗拒力,从而将尾桁推向相反方向。
通过改变尾部螺旋桨桨叶的迎角,飞行员可以让直升机向任意方向旋转或根本不让它转向。
而阿帕奇有两个尾部螺旋桨,每个螺旋桨有两个桨叶。
最新的阿帕奇直升机装备有两个通用电气T700-GE-701C涡轮轴引擎,每个引擎的功率大约为1,700马力(1249.5千瓦,1马力=0.735千瓦),分别驱动一个传动轴,而传动轴和一个简单的传动箱相连接。
传动箱将旋转角度改变大约90度并将动力传递给传动装置。
传动装置将动力传递给主螺旋桨和通向尾部螺旋桨的一根长轴。
螺旋桨已经过优化,可以提供普通直升机所不具备的高灵活性。
AH-64A“阿帕奇”——美军的印第安勇士

当我们把“武装直升机”这个短语输入浏览器中,第一个跳出的结果将会是维基百科上关于AH-64“阿帕奇”的文章,如果你问为什么,那只能说“阿帕奇”拥有武装直升机的一切特征。
它可以携带大量的各型导弹,一门大型遥控机炮,而且正处于技术设计的巅峰时期。
它的外观极具攻击性,活跃于过去30年间的多次战争中,且在战场上显示出压倒性的优势。
此外,这是一架只用于杀戮的直升机,而不是如同其它直升机一样,泛泛的作为多用途直升机使用。
我非常高兴长谷川(HASEGAWA)于2016年春推出他们新版的AH-64E“阿帕奇卫士”,它是该系列的最新型号,自2013年起一直活跃在战场上。
这个改型拥有更快的速度,改进了油耗,因此提高了战场续航时间,各项技术指标也得到了最新的升级。
例如,AH-64E的飞行员能够操作无人机——“捕食者系”列的最新版本MQ-1C“灰鹰”。
其目的是在“阿帕奇”内将无人机的优势发挥到极致,从而取代“奇奥瓦”直升机。
长谷川推出的最新版“阿帕奇”和之前的D型共用相同的板件,但同时还附有E型区别于D型的新零件。
例如新开的主旋翼桨叶、多种样式的天线、不同的机头传感器和不同形状的排气口。
模型本身质量很好,我觉得甚至可用完美来形容,它的组合度上佳,几乎用不上补土。
素组过程中我仅仅发现一个问题——挡风玻璃和机身之间有1毫米宽的间隙,不过用薄胶板和补土就可以轻松解决。
此外,机身和侧面之间以及发动机周围有出现一些较小的缝隙。
我的制作过程如下:在粗略地组装后,我先喷涂驾驶舱并进一步着色,这是为了确保各部分都正确地安装在机身上,避免上胶过程中损伤驾驶舱。
接着我购买了牛魔王(Eduard)配套的蚀刻片,这只是一套内构件而且我只选用了其中部分零件。
说得更精确一点——由于驾驶舱内部射出件已经足够优秀,蚀刻片并不见得能够增色多少,因此我只选用其中的安全带足矣。
况且,蚀刻片适配的是D型,而E型的仪表板还是有些细微差异的。
我用Armycast Company出品的水贴来表现而将长谷川附带的水贴弃之不用,原因众所周知,长谷川的水贴实在是太厚了。
阿帕奇简介及操作手册
阿帕奇事务所业务集中控制与管理平台简介与核心模块操作指引一、会计师事务所管理信息化总体框架阿帕奇事务所业务集中控制与管理平台系统应采用基于开源框架基础上开发的定制性框架,整个系统在职责上分为四层:表示层,业务层,持久层和领域模型层。
系统当中的各个层相互独立,只通过领域模型层进行业务数据的传递.整个系统分层清楚,职责明确,系统的耦合性降低, 扩充性,兼容性增强,更有利于系统的维护,从而使系统的维护成本降低。
系统架构图:系统采用基于INTERNET的纯B/S架构,部署于中央服务器,用户将通过互联网访问中央服务器登录系统。
用户登录不受地域与客户端的限制,只要能上网就能登录到系统进行相关业务操作,所有的数据集中保管将更为安全。
此外,B/S层次分离的优势体现在界面统一为浏览器,并具有统一的语言格式,统一的传输协议,系统管理简单,能够优化资源,可支持数据库和方便信息发布等。
系统拓扑与控制流程图:二、信息化方案核心模块1. 客户管理越接近客户,越容易创新项目挖掘,是事务所业务增长的保证会计师事务所的客户管理不仅仅是客户档案材料的汇总,是在此基础上充分动态整合客户基础信息、项目信息、项目外勤状况、项目收费、项目报告执行过程、客户维护等综合资讯,让事务所越接近客户。
即时查看给客户做过的所有业务的具体情况:包括每年度的收费、项目内容、执行情况详情。
对客户资料库进行分析,深度挖掘出老客户的业务需求。
事务所领导可加强对客户联系、客户拓展的监控,确保客户关系的良好发展。
严密权限控制,有效隔绝查看客户资料的人员范围。
2. 协议与收费管理坚持给执行便捷,并且代价较低,才能形成可持续的规范管理a.业务导入的起始:将业务起始时间、项目金额、实施项目组、等项目基本信息进入到系统当中。
b.实现电脑联机协议与发票打印功能:协议、发票将实现联机“套打”,同时协议将实现统一编号归档,与发票一通将在签署打印之后可进行核销确认。
c.资金到帐确认流程(应收账款管理)与统计分析:将项目收费从协议金额到实际到账金额实现流程式的管理与控制,使业务收入将得到更为精确高效的管理,使得业务收费控制更加清晰与有据可查。
美陆军部队阿帕奇攻击直升机装备情况
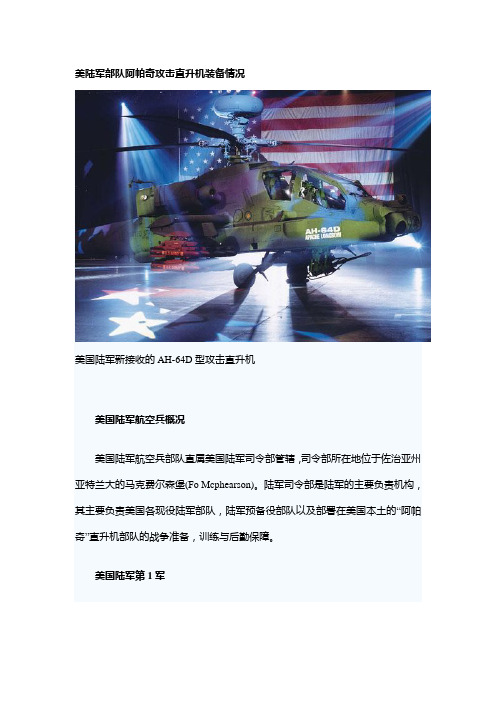
美陆军部队阿帕奇攻击直升机装备情况美国陆军新接收的AH-64D型攻击直升机美国陆军航空兵概况美国陆军航空兵部队直属美国陆军司令部管辖,司令部所在地位于佐治亚州亚特兰大的马克费尔森堡(Fo Mcphearson)。
陆军司令部是陆军的主要负责机构,其主要负责美国各现役陆军部队,陆军预备役部队以及部署在美国本土的“阿帕奇”直升机部队的战争准备,训练与后勤保障。
美国陆军第1军美国陆军第1军(绰号Eye Corps)司令部所在地位于华盛顿州的利维斯堡(Ft Lewis),第1军下属部队以轻型步兵部队为主,其中绝大部分都是预备役部队。
分布在包括阿拉斯加和夏威夷在内的20多个州。
20世纪80年代初美国陆军力量进行调整,一些现役野战主力轻型步兵部队开始被编入第1军,但是直到90年代初,AH一64A武装直升机才开始进入该军服役,此前第1军一直没有装备武装直升机。
美国陆军第1军所辖的航空旅为美国陆军航空兵66航空旅,驻地为华盛顿州穆里军营,该军营曾经是华盛顿陆军国民警卫队司令部所在地,1998年改建后完全划归66航空旅。
该航空旅下辖两支“阿帕奇”直升机部队,即4-501攻击直升机大队和5-501攻击直升机大队,这两支部队的前身从1993年开始曾经同美国陆军第8军一起部署在韩国,但是在1 996年时被重组并授予了新的编号。
经过多次整编,现在位于尤他州的陆军国民警卫队21 1航空团。
以及位于亚利桑那州的陆军国民警卫队285航空团分别被编入第66航空旅,位于印第安纳州的陆军国民警卫队183航空团也被编入第1军陆航部队。
而66航空旅所属AH-64A直升机的日常维护与后勤保障。
则由陆军预备役部队1 D3军后勤司令部负责。
美国陆军第3军作为美国陆军中一支历史悠久、战功卓著的部队,陆军第3军的历史可以追溯到1918年,该军当年开始参加第一次世界大战并进入法国作战。
26年后,陆军第3军又参加了第二次世界大战,并在1944年的布拉格会战中一战成名。
直升机使用说明书

固高科技使用说明书双旋翼MIMO系统务必将此说明书交给客户●非常感谢您选购固高科技GHC系列产品。
●在您使用之前,请仔细阅读此说明书,确保正确使用。
●如果您在使用中遇到技术故障,欢迎随时来电来函咨询。
并请将此书妥善保存,以备随时查阅。
目录目录 (1)第一章注意事项 (2)1.1开箱后注意事项 (2)1.2使用中注意事项 (2)第二章系统概述 (3)2.1双旋翼MIMO系统组成 (3)2.1.1 双旋翼MIMO系统实验本体 (4)2.1.2 双旋翼MIMO系统电控箱 (4)2.1.3 控制平台 (4)第三章系统安装 (5)3.1 安装运动控制卡 (5)3.2 连线 (5)3.3 软件安装 (6)第四章系统使用说明 (7)4.1 系统操作步骤 (7)第五章维护及常见故障处理 (8)第一章注意事项安全警告在安装、使用和维护前请仔细阅读本手册。
警告标志指出存在一个潜在的危险,如不避免,可能会导致生命危险或严重伤不正确的操作可能会导致设备毁坏禁止操作必需操作注意事项1.1开箱后注意事项◆检查产品在运输过程中是否造成损坏◆检查所属配件是否备齐(参照装箱单)◆如果产品内容不符合,有短缺或损坏,请与本公司或经销处联系1.2使用中注意事项◆双旋翼MIMO系统的本体要安放在足够平足够大的地面上,不可倾斜放置第二章系统概述2.1双旋翼MIMO系统组成双旋翼MIMO系统(简称直升机系统)作为自动控制和航空航天实验系统,可以满足工科院校的自控原理、现代控制理论、控制系统和计算机控制系统课程设计的需求。
GHC双旋翼MIMO实验系统是固高科技有限公司为全方位满足自动控制和航空航天课程的教学需要而研制、开发的实验教学平台。
双旋翼MIMO实验系统是研究直升机飞行控制技术的平台,它主要由电机、电机驱动器、位置编码器、运动控制器及接口板等元件组成。
此系统可以分为直升机实验本体、电控箱及由运动控制卡和PC机组成的控制平台等三大部分。
系统组成框图见图2-1。
美国陆航部队两款最新型直升机性能解析

美国陆航部队两款最新型直升机性能解析
根据美国航空现代化计划,在未来几十年时间里,美国陆军航空兵的主要作战力量将由AH一64“阿帕奇”、CH-47“支努干”、UH-60“黑鹰”、ARH和UH-72A轻型多用途直升机这五种机型组成。为此,美军在取消“科曼奇”直升机计划的同时,加速淘汰AH-I、UH一1、OH-58D和OH-58A/C等,采购AHR、UH-72A直升机,改进AH-64A、CH-47与UH-60直升机,采购总数将超过800架。ARH直升机正视特写
除了机头部位的传感器转塔外,ARH变化最大的就是座舱。ARH将采用一种非常先进的数字式驾驶舱,从中似乎还能看到“科曼奇”的一些设计理念。与OH-58D直升机上所使用的显示设备相比,具有更好的用户界面。座舱前方装有多功能显示器和彩色显示部件。通信一识别设备包括蓝军跟踪者(BFT)设备、升级的数据调制解调器、卫星通信设备、UHF/VHF电台、二级UAV控制、无线电发射机应答器、内部通信网络。其中,BFT设备是一种防止因识别错误被友军误伤的设备,目前已经装备了2000多部车辆和大约200架飞机。导航设备包括H一76ACE全球导航系统、VOR/ILs、数字式地图、雷达高度表、ARN-1 53-V4“塔康”、EGI。为了增强防御能力,ARH在机头两侧都安装了AN/APR一39B(V2)雷达告警接收机和AN/AAR一47(V2)导弹逼近告警器,机身上安装了AN/ALE-47红外对抗布撒器。
针对美国陆军RFP的关键要求之一的部署能力,贝尔直升机公司将为ARH设计可折叠的主旋翼和可拆卸的武器挂架、垂直尾翼及水平尾翼。这样,两架ARH直升机可以由一架C-130运输机运输到作战地点。地勤人员在15分钟内就可以快速将其恢复到飞行状态,迅速起飞并投入战斗。 ARH的一个突出特点是将目标截获传感器转塔悬挂在了机头下方,明显不同于OH-58D直升机所采用的桅顶观察仪(MMS)。究其原因,贝尔直升机公司主要考虑到了美国陆军转型后的任务重点,即ARH不再更多地承担OH-58D直升机通常肩负的野外战场观测任务,而是更加注重城市战。在城市战中,飞行员需要更多的是下视观察,而非前视探测。从结构角度来讲,这种回归传统的设计相对更为简单,无需考虑主旋翼旋转和振动的影响,不仅减轻了重量,还相应降低了成本。贝尔直升机公司专门研制了BriteStarll型传感器转塔。这种圆球状的转塔中,不仅包括现有的第三代热成像仪、微光电视摄像机和激光测距器等传感器,具有优异的测距性能,而且还增加了激光指示器和激光点跟踪仪。因此,ARH凭借着这种先进的前视红外系统,无论是恶劣天气还是昼夜等条件下,都能在作战中发现任何目标和动向,将实时作战信息提供给联合作战部队,同时还可以精确使用联合传感器和火力。此外,贝尔直升机公司表示。ARH还可以根据作战需要进一步升级,加装自动跟踪仪、整体瞄准模块和可逆转塔、MIL-STD-1 553B、RS-232/422和ARINC界面。
AH-64阿帕奇武装直升机(A

快速导航
微信文章
分享
基本信息
中文名:AH-64阿帕奇武装直升机
外文名:AH-64 Apache helicopter gunships
首飞时间:1975年9月30日
目前数量:1200余架
生产:波音、阿古斯塔、富士重工
服役时间:1986年4月
历史沿革
原型机计划
AH-64机头的航电舱
AH-64武装直升机是1973年提出的“先进武装直升机计划”(Advanced Attach Helicopter,AAH)的产物。在AAH计划之前,美国陆军执行过“先进空中火力支援系统”(AAFSS)计划,参与竞标的三种机型分别是洛克希德的AH-56夏安(Cheyenne)、贝尔的眼镜蛇王以及西科斯基的S-67。但是此计划过于好高骛远,而且未能确定对此一计划的真正需求,于是在历经冗长且昂贵的研发过程后,在1972年8月9日遭到取消。AAFSS计划停止之后,美国陆军检讨了其失败的原因,在AAFSS取消后不久后便提出一个切合实际的替代的方案,此即为AAH。不同于以往AH-1等武装直升机以伴随地面部队并提供火力支援为首要之务,AAH考量到弥补固定翼攻击机在反坦克能力上的不足,并消弥欧陆战场上北约国家相对于华约国家在装甲武力数量上的巨大劣势,定义为一种能携带反坦克导弹、格外注重猎杀硬性目标与多目标接战能力的专业反装甲武装直升机。最初参与竞标AAH的共有洛克希德、休伊直升机(Hughes Helicopters,1985年8月与麦道合并)、贝尔、波音以及西科斯基等五家厂商。
阿帕奇直升机快速成型-28页word资料
成绩西南科技大学城市学院City Colle ge of Sout hwest Unive rsity Of Scien ceandTechnology 《快速成型技术与应用》项目设计说明书2019~2019学年第2学期设计题目:阿帕奇直升机的零件成型题目类别:快速成型指导教师:高旭芳专业班级:机制1103班姓名:李宏学号:201940269日期:机电工程系制项目报告实验名称阿帕奇直升机的零件成型指导老师高旭芳实验时间实验地点C-618 同组人机制1103班第四组试验目的掌握pre三维建模成型基本流程,掌握ModelWizard软件的主要功能。
实验原理该实验是采用PROE三维软件进行建模,而PROE的系列软件包括了在工业设计和机械设计等方面的多项功能,还包括对大型装配体的管理、功能仿真、制造、产品数据管理等等。
Pro/ENGINEER还提供了全面、集成紧密的产品开发环境。
是一套由设计至生产的机械自动化软件,是新一代的产品造型系统,是一个参数化、基于特征的实体造型系统,并且具有单一数据库功能的综合性MCAD软件。
该实验还采用3D打印技术—快速成型技术(Rapid Prototyping),快速成型技术是对零件的三维CAD 实体模型,按照一定的厚度进行分层切片处理,生成二维的截面信息,然后根据每一层的截面信息,利用不同的方法生成截面的形状。
这一过程反复进行,各截面层层叠加,最终形成三维实体。
分层的厚度可以相等,也可以不等。
分层越薄,生成的零件精度越高,采用不等厚度分层的目的在于加快成型速度。
FDM —熔融沉积制造工艺原理如图所示。
成形时,丝状的成形材料和支撑材料由送丝机构送至各自对应的微细喷头,在喷头的挤出部位被加热至熔融或半熔融状态。
喷头在计算机控制下,按照模型的CAD分层数据控制的零件截面轮廓和填充轨迹作X-Y 平面运动;同时在恒定压力下,将融化的材料以较低的速度连续的挤出并控制其流量。
材料被选择性的沉积在层面指定位置后迅速凝固,形成截面轮廓,并与周围的材料凝结。
直升机使用说明书
Important instruction:Because our product is using gyro technology ,so please according to the following method to operate it .1.turn the power switch of the remote control to “on”, thenpull the throttle operation lever to the lowest place.2.connect the helicopter’s power line properly, turn the powerswitch to “on”, place the helicopter on the ground steadiy, right now please keep the helicopter motionless, after 5minutes the gyro complete verity, then it can fly normally. part names平衡杆:balanced beam连接扣:connected button上风叶:wind leaf下风叶:Downwind leaf上风叶座:Wind leaf seat下风叶座:Downwind leaf seat尾风叶:tail fan充电口:charging port起落架:undercarriage指示灯:LED油门:accelerograph频率切换:Switching Frequency电源开关:Power Switch左转、右转、前进、后退:turn left/turn right/forward/backward 左转、右转(微调):turn left/turn riht(fine tuning)充电线:rechargeable line组装遥控器assemble the remote control1.The means of installing the batteries: open the battery cover on the back of the remote control, according to LED pole in the cell box, put 4 AA alkaline batteries correctly(Batteries need to buy)Tips:1. when installing the batteries, you must pay attention tothe positive and negative pole and the positive and negative pole of the cell box , don’t counter-attire them.2. Do not mix use old and new batteries.3. Do not mix use different kinds of cellsPower battery charging instructions1.turn the switch of the helicopter to “off”2.(1)charge modeA: Remote charging:Connect the charging plugs to the charge port of the helicopter, the LED of the remote control turn green(thetime of charging is about 40 to 50 miniutes), when it complete charging, the light turns red.(2)charge mode B:USB charging: insert USB chargingline into USB port of the computer, when the charging line indicator on, connect the USB charging plug to the charge port of the helicopter, at this moment the light is off(the time of charging is about 40 to 50 miniutes), when the light of the charging line lit, the charging is completed.Flight conditions1.fly on the weather is warm and sunny(1)don’t fly on extremum air temperaturenever flight in higher temperature than 113 degrees Fahrenheitfly on the weather is too cold or too hot will influence the flight effect or destroy the helicopter(2)don’t fly under the strong windStrong wind will induce the flight limitations, or it will hider your flight control. Fly under the strong wind, your helicopter will not been found or destroy.2.choose an Indoor spacious place to fly and ensure thatno obstructions, pets or people is around。
2019年长弓阿帕奇直升机.doc

2019年长弓阿帕奇直升机篇一:盘点世界知名武装直升机盘点世界知名武装直升机(组图)[25P]美国AH-1“眼镜蛇”直升机美国AH-1“眼镜蛇”是一款由贝尔直升机公司所制造的攻击直升机。
因型号不同而有许多称号,如:休伊眼镜蛇(HueyCobra)、海眼镜蛇(SeaCobra)、超级眼镜蛇(SuperCobra)、W眼镜蛇、蝰蛇(Viper)、Z眼镜蛇或蛇(Snake)。
AH-1W“超级眼镜蛇”直升机正在加油AH-1W直升机正从美国两栖攻击舰上起飞美国AH-64“阿帕奇”直升机位于伊拉克的一架美军AH-64D长弓阿帕奇美国AH-64“阿帕奇”直升机(AH-64Apache)是由麦克唐纳道格拉斯飞机公司(现波音的一部份)为美国陆军所设计制造的一款主力武装直升机。
它是根据美国陆军的先进武装直升机(AdvancedAttackHelicopter,AAH)计划所开发,以作为AH-1“眼镜蛇”的后继机种。
AH-64D的正面图荷兰皇家陆军AH-64D美国OH-58“奇奥瓦”直升机OH-58D“奇奥瓦”侦察直升机美国贝尔OH-58“奇奥瓦”侦察直升机是一种直升机家族,单引擎单旋翼,可以有观测和部分攻击能力。
OH-58“奇奥瓦”自从1968就开始在美军服役。
最新机型是OH-58D“奇奥瓦战士”,主要是担任陆军支援的侦察角色。
篇二:世界军用直升机大全中国直升机:中国直10中国直11中国直9中国直-8中国直6中国直5中国延安中国米8篇三:世界十大武装直升机世界十大武装直升机武装直升机是装有武器、为执行作战任务而研制的直升机。
说到武装直升机,先要讲一下直升机。
直升机是谁最先发明的,这个看法也不完全一致。
现在较公认的是,第一架接近实用的直升机是由美籍俄国人西科斯基研制的VS-300,它于1939年9月14日试飞成功。
这个西科斯基是个传奇式的人物,他曾在1914年研制成当时世界上最大的轰炸机。
在直升机上加装武器开始于40年代。
阿帕奇直升机操作
起飞按6-7-8-9-0(推力,越往后推力越大)等速度到120的时候就可以按↓键起飞了起飞后按G收起起落架L键平飞R键是雷达开关S、X两个键分别控制雷达侦察范围S侦察范围小适合飞机近身格斗使用X反之-键+键控制飞机减速和加速f22最大能达到200%的加速可以轻易甩掉后面咬着你的飞机还有飞机在天上的时候←键→键不是方向键而是控制飞机左右翻滚要上下左右四个键互相配合才能转弯A键是飞向目标H键是返航但是要配合雷达使用数字键1、2、3、4是武器选择导弹都是自动锁定按空格键就能发射了掌握好发射距离最重要发射早了打不到发射晚了说不准对方先发射把你打下来了还有就是降落很不好掌握在天上对好机场跑道把发动机开到最小掌握好距离然后慢慢下降关闭发动机按5 再打开起落架G 到跑道上按B刹车就这样A 自动驾驶Enter 锁定目标B 刹车/ 显示操作键C 释放金属乾扰物’’ 显示最危险的目标G 放下/拉起起落架; 轮流切换武器H 自动驾驶返回基地. HUD显示颜色的明暗变化L 自动拉平[ 选择上一个目标M 任务简报] 选择下一个目标N 轮流切换到下一个导航点不论是友军还是敌军R 开/关雷达Page Down 右转S 雷达显示范围缩小Delete 左转X 雷达显示范围扩大Ctrl+J 弹射逃生W 给僚机命令1 切换到AIM-120空对空导弹2 切换到AIM-9响尾蛇空对空导弹3 切换到机炮4 切换到JDAM空对地集束炸弹6 发动机60%功率7 发动机70%功率8 发动机80%功率9 发动机90%功率0 发动机100%功率F1-F4 长机的各种视角F5-F8 僚机的各种视角F9-F12 时间加速1、2、4、6倍Keypad2 显示弹药贮藏状况Keypad4/Insert 显示防御系统状况Keypad5/Home 显示导航系统状况Keypad6/PageUp 显示攻击系统状况Keypad7 显示系统损坏状况Keypad8 开启/关闭导航视窗Keypad9 人工驾驶BackSpace 打开加力Tab/Crtl Tab 确定目标为攻击目标SpaceBar 开火Break 暂停游戏1153|评论(1)起飞:按9 这是油门当速度到200以后按向下的光标飞机就飞起来了到一定高度后按a 自动飞行l水平飞行1234是武器选择空格是发射HOME周围是雷达按纽C是铂条干扰盛夏的自己酌么吧每一关的任务不同,你开始游戏前先把武器选好,F-22配备4种武器,1键中距空-空导弹2-响尾蛇格斗导弹3-火神炮4-JDAM激光制导炸弹你在攻击地面目标时要先选4,然后就会出现标靶了. 空-空导弹: 当你目标变红时,证明进入有效射程,但不一定能击中.看好再打.S/X 扩大/缩小雷达显示范围Tab键选择跟踪的目标Enter键选定目标空格给你两个秘籍:开始后按T 然后输入:下面任一段回车ill be back 弹药加满never tell me the odds 不会被击中there can be only one 无敌we can rebuild him 修复按住“+”这个键是增加到100%推动力,“-”是减少到60%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新型阿帕奇武装直升飞机产品说明书一:直升飞机照片。
二:作品简介。
该直升飞机模型原型是阿帕奇武装直升飞机。
跟M1艾布拉姆斯坦克一样,阿帕奇直升机也是从一项本来被取消的计划中救活的,这项计划就是洛克希德公司的AH-56“夏安”。
“夏安”的性能表现主要着重于高速度,而非灵巧与隐秘性。
AHAH-64长弓阿帕奇武装直升机 (6张)-56外型像只愤怒的蜂鸟,是模仿第二次世界大战前苏联的IL-2“突袭战士”制造的。
“突袭战士”是装甲俯冲轰炸机,主要是用来对付坦克的,它机上的两门23毫米炮,可以炸掉大部分纳粹装甲车的车顶装甲。
有些“突袭战士”甚至创下摧毁几百辆坦克的纪录。
除了主要的旋转翼,“夏安”机尾还装有推进螺旋桨和短短的机翼,以便增加它的速度(时速超过300英里/480公里。
对螺旋桨飞机来说,这已经是相当快了)。
阿帕奇的主要作用是高速向着目标俯冲而下,同时混合使用TOW式导弹(这是第一架使用TOW式导弹的直升机)、2.75英寸/70毫米火箭和20毫米的机炮攻击目标。
我们的作品是先通过creo三维软件建模,再根据图纸尺寸制作的。
1)装配图。
2)零件图。
(机身)(上机翼)(火箭巢)(尾翼)三:制作过程。
1)在网上、图书馆里面查找了关于空气动力学、螺旋桨、飞机机身结构等方面的资料。
2)根据我们所查找的知识,借助于软体Creo2.0做三维模型建模3)根据建模好的模型,我们就开始开始实体制作了。
实体的制作我们是采用了从下到上、从里到外,从主体机架到局部零件的制作原则。
(乐博尔与汤奇良画机身)(刘京南制作螺旋桨)(刘少辉与汤奇良裁pvc板)四:直升飞机工作原理。
1. 概况与普通飞机相比,直升机不仅在外形上,而且在飞行原理上都有所不同。
一般来讲它没有固定的机翼和尾翼,主要靠旋翼来产生气动力。
这里所说的气动力既包括使机体悬停和举升的升力,也包括使机体向前后左右各个方向运动的驱动力。
直升机旋翼的桨叶剖面由翼型构成,叶片平面形状细长,相当于一个大展弦比的梯形机翼,当它以一定迎角和速度相对于空气运动时,就产生了气动力。
桨叶片的数量随着直升机的起飞重量而有所不同。
重型直升机的起飞重量在20t以上,桨叶的数目通常为六片左右;而轻、小型直升机,起飞重量在1.5t以下,一般只有两片桨叶。
直升机飞行的特点是:(1) 它能垂直起降,对起降场地要求较低;(2) 能够在空中悬停。
即使直升机的发动机空中停车时,驾驶员可通过操纵旋翼使其自转,仍可产生一定升力,减缓下降趋势;(3) 可以沿任意方向飞行,但飞行速度较低,航程相对来说也较短。
2. 直升机旋翼的工作原理直升机旋翼绕旋翼转轴旋转时,每个叶片的工作类同于一个机翼。
旋翼的截面形状是一个翼型,如图2.5.1所示。
翼型弦线与垂直于桨毂旋转轴平面(称为桨毂 旋转平面)之间的夹角称为桨叶的安装角,以 表示,有时简称安装角或桨距。
各片桨叶的桨距的平均值称为旋翼的总距。
驾驶员通过直升机的操纵系统可以改变旋翼的总距和各片桨叶的桨距,根据不同的飞行状态,总距的变化范围约为2º~14º。
气流V 与翼弦之间的夹角即为该剖面的迎角 。
显然,沿半径方向每段叶片上产生的空气动力在桨轴方向上的分量将提供悬停时需要的升力;在旋转平面上的分量产生的阻力将由发动机所提供的功率来克服。
旋翼旋转时将产生一个反作用力矩,使直升机机身向旋翼旋转的反方向旋转。
前面提到过,为了克服飞行力矩,产生了多种不同的结构形式,如单桨式、共轴式、横列式、纵列式、多桨式等。
对于最常见的单桨式,需要靠尾桨旋转产生的拉力来平衡反作用力矩,维持机头的方向。
使用脚蹬来调节尾桨的桨距,使尾桨拉力变大或变小,从而改变平衡力矩的大小,实现直升机机头转向(转弯)操纵。
图1 直升机的旋翼 (a)(b)3. 直升机旋翼的操纵直升机的飞行控制与飞机的飞行控制不同,直升机的飞行控制是通过直升机旋翼的倾斜实现的。
直升机的控制可分为垂直控制、方向控制、横向控制和纵向控制等,而控制的方式都是通过旋翼实现的,具体来说就是通过旋翼桨毂朝相应的方向倾斜,从而产生该方向上的升力的水平分量达到控制飞行方向的目的。
直升机体放在地面时,旋翼受其本身重力作用而下垂。
发动机开车后,旋翼开始旋转,桨叶向上抬,直观地看,形成一个倒立的锥体,称为旋翼锥体,同时在桨叶上产生向上的升力。
随着旋翼转速的增加,升力逐渐增大。
当升力超过重力时,直升机即铅垂上升(图2.5.2);若升力与重力平衡,则悬停于空中;若升力小于重力,则向下降落。
旋转旋翼桨叶所产生的拉力和需要克服阻力产生的阻力力矩的大小,不仅取决于旋翼的转速,而且取决于桨叶的桨距。
从原理上讲,调节转速和桨距都可以调节拉力的大小。
但是旋翼转速取决于发动机(通常用的是涡轮轴发动机或活塞式发动机)主轴转速;而发动机转速有一个最有利的值,在这个转速附近工作时,发动机效率高,寿命长。
因此,拉力的改变主要靠调节桨叶桨距来实现。
但是,桨距变化将引起阻力力矩变化,所以,在调节桨距的同时还要调节发动机油门,保持转速尽量靠近最有利转速工作。
直升机的平飞依靠升力倾斜所产生的水平分量来实现。
例如,欲向前飞,需将驾驶杆向前推,经过操纵系统,自动倾斜器使旋翼各桨叶的桨距作周期性变化,从而改变旋翼的拉力方向,使旋翼锥体前倾,产生向前的拉力(图),将直升机拉向前进。
直升机的方向是靠尾桨控制的。
欲使直升机改变方向,则需踩脚蹬,改变尾桨的桨距,使尾桨拉力变大或变小,从而改变平衡力矩的大小,实现机头指向的操纵。
通过与操纵系统的连接,旋翼叶片的桨距调节变化可以按两种方式进行。
第一种方式是各叶片同时增大或减小桨距图2 直升机的飞行(简称总距操纵,驾驶员通过总距操纵杆来操纵控制),从而产生直升机起飞、悬停、垂直上升或下降飞行所需要的拉力。
第二种方式是周期性调节各个叶片的桨距(简称周期性桨距操纵)。
比如打算前飞,就将驾驶杆向前推,推动旋转斜盘(也称自动斜倾器)倾斜,使各个叶片的桨距作周期变化。
每个叶片转到前进方向时,它的桨距减小,产生的拉力也跟着下降,该桨叶向上挥舞的高度也减小;反之,当叶片转到后方时,它的桨距增大,产生的拉力也跟着增加,该桨叶向上挥舞的高度也增大。
结果,各个叶片梢(叶端)运动轨迹构成的叶端轨迹平面或旋翼锥体,将向飞行前进方向倾斜,旋翼产生的总拉力也跟着向前倾斜,旋翼总拉力的一个分量就成为向前飞行的拉力,从而实现了向前飞行。
2 直升机的构型变化直升机旋翼的旋转产生了升力的同时,空气对旋翼的反作用也形成了一个与旋翼旋转方向相反的作用力矩,驱使直升图3 旋翼操纵机构图4 周期变距图解机的机体反向旋转,这就是所谓的直升机力矩及力矩平衡问题。
较早致力于力矩和力矩平衡方面研究的是德国人贝纳恩(B.R.Beenal)和阿赫班奇(Achenbach)。
他们两人分别于1897年和1874年提出安装一个尾桨来平衡直升机旋翼产生的反向力矩的方案。
通过安装尾桨,可产生一个平衡力矩,以抵消旋翼力矩,保证直升机的平衡飞行。
实际上这就是后期发展成熟的单桨式直升机的萌芽。
此后,许多直升机事业的先驱者都试图研究并解决飞行力矩问题,运用两个或更多的旋翼来克服飞行力矩,其原理是使这些旋翼以相反的方向旋转,使各自的飞行力矩彼此抵消保证平衡。
探索的结果导致了直升机几种不同的结构形式:单桨式、共轴式、横列式、纵列式、多桨式等的问世。
单桨式成为后来实用直升机的主要形式。
这种形式最早出现于1874年,是阿赫班奇设计的。
这架水蒸气机驱动的直升机包含一个举力旋翼和一个推进式螺旋桨,一个方向舵和一个尾桨。
这是用尾桨平衡直升机力矩的第一架直升机。
共轴式结构是在同一个轴上安装两个旋转方向相反的旋翼,这样两旋翼所产生的力矩就彼此抵消了。
早期直升机多采用这种结构形式,其最早的设计是布莱特于1859年作出的。
由于动力的缘故,这架直升机没有进行过试验。
早期取得一定成功的共轴式直升机是美国人埃米尔·贝林纳(E .Beliner)于1909年设计的。
他的直升机安装了两台发动机,与共轴的旋翼相连。
旋翼采用坚硬的木质桨叶,通过倾斜整个族翼及部分机身来达到控制。
这架直升机成功地飞行了三次。
纵列式结构是通过沿身体前后排列的两个旋向相反的旋翼,来克服直升机的力矩的。
1907年,法国人泡特·科努(P .Comu)制造了一个外形结构与纵列式结构非常相似的直升机,并成功地进行了—它行试验,但这种结构在早期发展的直升机中较多采用,主要原因是机身长,重心变化范围大,稳定性差。
横列式结构是通过沿机体横向左右排列的两个旋转方向相反的旋翼来克服直升机力矩的。
这种结构的直升机最早出现在1908年与1909年间,是由美国人贝林纳设计制造的。
它将两个旋翼并排安装在机翼两端,通过倾斜整个旋翼及部图5 直升机的构型(a) 单旋翼直升机 (b) 共轴双旋翼直升机(c) 纵列双旋翼直升机 (d) 横列双旋翼直升机分机身实现飞行控制。
同样,这种结构形式后来也较少采用。
多桨式结构一般用于大型直升机上,它运用三个或更多的旋翼。
在早期的研究中,这种型式运用较多。
法国的孔萨斯于1845年设计的直升机就是这种直升机最早的代表。
它以蒸气机为动力,有一个主旋翼和两个分别用于控制和推进的副旋翼。
由于这种结构形式比较复杂,所以后来没有得到采用。
3 旋翼机的飞行原理从外形看,旋翼机和直升机几乎一模一样:机身上方安装有大直径的旋翼,在飞行中靠旋翼的旋转产生升力。
但是除去这些表面上的一致性,旋翼机和直升机却是两种完全不同的飞行器。
旋翼机实际上是一种介于直升机和飞机之间的飞行器,它除去旋翼外,还带有推进螺旋桨以提供前进的动力,有时也装有较小的机翼在飞行中提供部分升力。
旋翼机的旋翼不与发动机传动系统相连,在旋翼机飞行的过程中,由前方气流吹动旋翼旋转产生升力,是被动旋转;而直升机的旋翼与发动机传动系统相连,既能产生升力,又能提供飞行的动力,是主动旋转。
在飞行中,旋翼机同直升机最明显的分别为:直升机的旋翼面向前倾斜,而旋翼机的旋翼则是向后倾斜的。
由于旋翼机的旋翼为自转式,传递到机身上的扭矩很小,因此旋翼机无需单旋翼直升机那样的尾桨,但是一般装有尾翼,以控制飞行。
有的旋翼机在起飞时,旋翼也可通过“离合器”同发动机连接,靠发动机带动旋转而产生升力,这样可以缩短起飞滑跑距离。
等升空后再松开离合器随旋翼在空中自由旋转。
旋翼机飞行时,升力主要由旋翼产生,固定机翼仅提供部分升力。
有的旋翼机甚至没有固定机翼,全部升力都靠旋翼产生。
旋翼机的飞行原理和构造特点决定了它的速度慢、升限低、机动性能较差,但它也有着一些优点:(1)安全性较好;(2)振动和噪音小;(3)抗风能力较强。
由于旋翼机的旋翼旋转的动力是由飞行器前进而获得,如果发动机在空中停车,旋翼机仍会靠惯性继续维持前飞,并逐渐减低速度和高度,高度下降的同时,自下而上的相对气流可以为维持旋翼的自转,从而提供升力。