基于二阶参考模型随动系统串联校正
基于matalab软件的随动系统的控制设计及仿真

基于matalab软件的随动系统的控制设计及仿真作者:王泉来源:《科技资讯》2013年第01期摘要:本文对一小功率随动系统进行了分析研究。
并对系统进行了建模,构造了其具体的系统框图;并利用Matlab软件对系统进行了多次仿真,最终为本系统设计了一种串联校正方案,使得系统的性能达到了较高水平。
关键词:随动系统建模 Matlab软件仿真串联校正中图分类号:TP273.2 文献标识码:A 文章编号:1672-3791(2013)01(a)-0032-01随动系统在工程设计中的应用十分广泛,其物理定义为:在控制系统中若给定的输入信号是预先未知且随时间变化,并且系统的输出量随输入量的变化而变化的一种特殊系统。
对于闭环自动控制设备的随动系统,它在生产过程中对运动对象的控制及定位、瞄准、跟踪步骤中起着重要作用,已经成为各种调节系统的必备成分。
本文针对小功率随动系统进行了建模研究,并设计了一种串联校正方案,其实验方法可供参考。
1 系统模型的建立位置随动系统是一类反馈控制系统,其原理为具有位置指令和位置反馈的检测装置通过位置指令装置将希望的位移转换成具有确定精度的电量,利用反馈装置随时检测出被控设备的实际位移(转化为电量)与初始指令进行比较,把偏差信号放大后,控制执行电机向消除偏差的方向旋转直到达到要求为止。
这就是一个简单的位置随动系统结构模型。
1.1 随动系统的模型图(如图1)2 校正前的系统分析小功率随动系统因电机的电枢电阻较大,允许的过载倍数较高,且不必过多限制过渡过程中的电流,为提升系统的快速性,可不设置转速环和电流环。
用SIMULINK进行动态仿真,得出系统校正前的阶跃响应曲线和BODE图,如图2和3所示。
3 由未校正系统得出结论图中所得Gm=-7.57,Pm=-3.2352,Wg=31.6228,Wc=48.8475。
该系统校正前的阶跃响应曲线是发散的,说明系统不稳定,必须进行校正。
4 系统的串联校正提升增益系数Kp能够降低系统的静态误差、缩小过渡过程时间和上升时间;提升积分增益系数Ki,能够降低系统的静态误差;而提升微分增益系数Kd能够降低系统的超调量、缩小过渡过程时间、而对系统的上升时间和静态误差的影响不大。
国家开放大学《机电控制工程基础》章节自测参考答案

国家开放大学《机电控制工程基础》章节自测参考答案第1章控制系统的基本概念一、单项选择题(共20道题,每题3分,共60分)1.产生与被控制量有一定函数关系的反馈信号的是()a.反馈元件b.校正元件c.控制元件d.比较元件2.产生控制信号的是()a.校正元件b.比较元件c.反馈元件d.控制元件3.以下()是随动系统的特点。
a.输出量不能够迅速的复现给定量的变化b.给定量的变化规律是事先确定的c.输出量不能够准确复现给定量的变化d.输出量能够迅速的复现给定量的变化4.以下()的给定量是一个恒值。
a.有静差系统b.恒值控制系统c.无静差系统d.脉冲控制系统5.反馈控制系统通常是指()a.混合反馈b.干扰反馈c.正反馈d.负反馈6.如果系统的输出端和输入端之间不存在反馈回路,这样的系统一定是()a.闭环控制系统b.正反馈环控制系统c.开环控制系统d.复合反馈系统7.开环控制系统的精度主要取决于()a.系统的校准精度b.放大元件c.校正元件d.反馈元件8.数控机床系统是由程序输入设备、运算控制器和执行机构等组成,它属于以下()a.程序控制系统b.恒值控制系统c.开环系统d.随动控制系统9.根据控制信号的运动规律直接对控制对象进行操作的元件是()a.校正元件b.执行元件c.反馈元件d.比较元件10.没有偏差便没有调节过程,通常在自动控制系统中,偏差是通过()建立起来的。
a.放大元件b.校正元件c.反馈d.控制器11.用来比较控制信号和反馈信号并产生反映两者差值的偏差信号的元件是()a.反馈元件b.校正元件c.控制元件d.比较元件12.输入量为已知给定值的时间函数的控制系统被称为()a.程序控制系统b.有静差系统c.脉冲控制系统d.恒值控制系统13.输入量为已知给定值的时间函数的控制系统被称为()a.程序控制系统b.随动系统c.有静差系统d.恒值控制系统14.输出端与输入端间存在反馈回路的系统一定是()a.开环控制系统b.正反馈环控制系统c.闭环控制系统d.有差控制系统15.()是指系统输出量的实际值与希望值之差。
两级串联超前校正网络飞行器控制系统设计

Science and Technology &Innovation ┃科技与创新2020年第05期文章编号:2095-6835(2020)05-0003-03两级串联超前校正网络飞行器控制系统设计李瑀馨(武汉理工大学自动化学院,湖北武汉430070)摘要:基于飞行器控制系统的已知条件,利用两级串联超前校正装置改善系统性能。
在稳定性、动态性能等方面对校正前后的系统进行了分析,通过劳斯稳定性判据、系统根轨迹判定和奈奎斯特判据三种方式,分析了系统的稳定性。
绘制了系统伯德图,求得了系统幅值裕度和相角裕量。
为进一步观察系统的动态性能,绘制了系统单位阶跃输入的响应情况进行观察。
理论分析结合Matlab 绘制图像,对比了校正前后的系统性能指标,设计的两级串联超前校正装置很好地满足了设计要求,而且校正后的系统快速性、稳定性、跟踪信号能力方面都有显著提升。
关键词:稳定性分析;动态性能分析;伯德图;两级串联超前校正中图分类号:TP273文献标识码:A DOI :10.15913/ki.kjycx.2020.05.0021任务要求已知一飞行器控制系统开环传递函数为:)()(2.361500 4+=s s Ks G 控制系统性能指标:调节时间小于0.01s ,单位斜坡输入的稳态误差小于0.0005,相角裕度大于80°。
本文首先分析校正前系统的稳定性、动态特性等,对系统状况有了初步的了解。
根据实际情况选择合适的校正装置,使得校正后的装置满足设计要求,并对校正前后系统进行对比分析。
2校正前系统性能分析2.1校正前系统的稳定性分析一般情况下,确定线性系统稳定性的方法分为基于经典控制理论和基于现代控制理论的方法。
经典控制论中,以传递函数或频率特性的形式来描述控制系统,稳定判据有:劳斯稳定判据、根轨迹法和奈奎斯特稳定判据等。
本文基于经典控制理论的稳定性判据,以确定特征根所在区域为目的,由此判断系统的稳定性[1-2]。
基于Matlab SISO工具箱的串联超前校正设计

图4 系统校正后的阶跃响应曲线 也小于10%,系统满足所有条件要求。(5)在控
器的设计工具,或者在初始界面中选择点击“应用
制和评估工具管理器界面中,可以在Compensator
程序”下的控制系统分析与设计部分中“Control
Editor(补偿器编辑器)选项框中看到串联校正装置
System Designer”模块,也可实现相同功能。一
采用SISO Tool系统补偿器设计工具来实现串
Gk(s),在工作区产生变量,其中Gk(s)=2 500/
联超前校正,设计者通过鼠标在图形上采用增加对
s(s+25)。(2)进入SISO图形化补偿器设计工具
应零极点的形式引入校正装置,一边调整零极点的
界面。(3)调整工具管理器界面结构,选择绘制
位置,增加或减少开环增益,另一边密切观察响应
[4] 郭庆,蒋丹,李辉.MATLAB SISO工具箱在机电控
图如图3所示,通过图4阶跃响应曲线的对比,可
制技术实践教学中的应用[J].实验科学与技
以明显看出相位裕量已经达到58.8º,-69.
集成电路应用 第 38 卷 第 6 期(总第 333 期)2021 年 6 月 47
Design of Series Lead Correction Based on Matlab
SISO Toolbox
WANG Chenfeng ( Department of Mechanical and Electrical Engineering, Shangluo Polytechnic, Shaanxi 726000, China. )
正问题,利用Matlab编程语言的传统方法步骤如
前-滞后校正,其常用的补偿器设计结构图如图1所
二四阶模型校正

表示为转折频率相对比值形式
四阶参考模型特点
• 斜率变化为1-2-1-2-3型 • 初始段斜率为 -20, 阶跃响应无差,有差
跟踪速度信号,
• 中频段穿越斜率为 -20, 调节2 3 来调节中频段宽度 h ,动态性好。 • 高频段衰减率为 -60,抑制高频噪声, 转折位置由4来调节。
四阶参考模型校正步骤 • 作原系统的伯德图L0 () • 根据给定的稳态精度Kv ,作期望特性的 低频段 • 依照给定的调节时间 ts ,估算开环截止 频率c
• 中频段斜率与中频段宽度
•
各转折频率小范围调整对 c 的影响
ω1,ω4同时向相反方向调整时,原相位裕度
基本不变
ω2 ,ω3同时向相同方向调整时,原相位裕度 基本不变
例:已知二阶系统校正前后的开环对数幅频特性 如图所示
-20dB/dec 0dB 0.5 L0 (ω ) 1 2
-40dB/dec L (ω )
解:1. 作固有特性 L0(ω)
2. 根据稳态性能要求,确定参考模型低频段 高度
3.估算开环截止频率c 取 4.确定中频段宽度
5.确定高频段转折频率 6.确定低、中频连接段转折频率ω1
K = 200
7.确定校正装置传函
8.校验
20 4
100
四阶参考模型校正讨论
• 开环增益调整
• 系统类型的调整
• 依照性能指标确定中频段宽度
给定时域性能指标
给定开环相角裕量
给定闭环谐振峰值
• 由ω2作一条斜率为-40的直线,与低频段 的相交点即为ω1
• 确定高频段转折频率
• 将图中两特性相减,即得校正装置特性Lc()• 校验ຫໍສະໝຸດ 例: 已知系统的固有特性为
自动控制理论(二)自考试题 (22)

.浙江省2004年1月高等教育自学考试自动控制理论(二)试题课程代码:02306一、单项选择题(在每小题的四个备选答案中,选出一个正确答案,并将正确答案的序号填在题干的括号内。
1—5小题每小题2分,6—15小题每小题1分,共20分)1.根据给定值信号的特点分类,控制系统可分为( )。
A.恒值控制系统、随动控制系统和程序控制系统B.反馈控制系统、前馈控制系统前馈—反馈复合控制系统C.最优控制系统和模糊控制系统D.连续控制系统和离散控制系统2.开环系统频率特性G(j ω)=3)j 1(3ω+,当ω=1rad/s 时,其频率特性相角θ(1)=()。
A.-45° B.-90°C.-135°D.-270°3.奈奎斯特稳定性判据是利用系统的( )来判据闭环系统稳定性的一个判别准则。
A.开环幅值频率特性B.开环相角频率特性C.开环幅相频率特性D.闭环幅相频率特性4.根轨迹上的点应满足的幅角条件为∠G(s)H(s)=( )。
A.-1B.1C.±(2l +1)π/2(l =0,1,2,…)D.±(2l +1)π(l =0,1,2,…)5.由电子线路构成的控制器如图,它是( )。
A.超前校正装置B.滞后校正装置C.超前—滞后校正装置D.滞后—超前校正装置6.系统的传递函数( )。
A.与输入信号有关B.与输出信号有关C.完全由系统的结构和参数决定D.既由系统的结构和参数决定,也与输入信号有关7.一阶系统的阶跃响应,( )。
A.当时间常数T 较大时有超调B.当时间常数T 较小时有超调C.有超调D.无超调8.输入为阶跃信号时,如果( ),则积分环节的输出信号的上升速度越快。
A.输入信号的幅度越小,积分时间常数越小B.输入信号的幅度越小,积分时间常数越大C.输入信号的幅度越大,积分时间常数越小D.输入信号的幅度越大,积分时间常数越大9.二阶振荡环节的对数频率特性相位移θ(ω)在( )之间。
自控原理基础实验课程设计(随动系统校正修正) 2
实验六随动系统的校正(课程设计)一、实验目的1.学习使用SIMULINK进行系统仿真的方法。
2.掌握如何运用最常用的校正方法对线性系统性能进行校正。
3.借助SIMULINK验证自行设计的校正方案的正确性。
4.掌握校正的概念和设计方法。
二、实验原理及内容:SIMULINK是MATLAB的重要组成部分。
它具有相对独立的功能和使用方法,实际上它是对系统进行建模、仿真和分析的软件包。
SIMULINK的基本功能模块包括连续系统、离散系统、非线性系统、函数与表、数学运算、信号与系统、输入模块、接收模块等组成。
在这里,我们主要针对实验涉及的有关部分作简要地介绍。
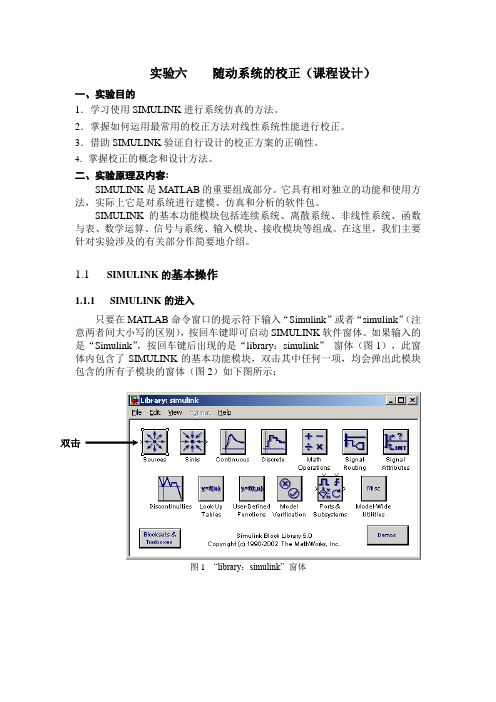
1.1 SIMULINK的基本操作1.1.1SIMULINK的进入只要在MATLAB命令窗口的提示符下输入“Simulink”或者“simulink”(注意两者间大小写的区别),按回车键即可启动SIMULINK软件窗体。
如果输入的是“Simulink”,按回车键后出现的是“library:simulink”窗体(图1),此窗体内包含了SIMULINK的基本功能模块,双击其中任何一项,均会弹出此模块包含的所有子模块的窗体(图2)如下图所示:双击图1 “library:simulink” 窗体图2 “Sources”模块包含的所有子模块的窗体如果输入的是“simulink”,按回车键后出现的是“Simulink library Brower”窗体(图3),此窗体内的左下子窗体显示了SIMULINK的基本功能模块,右下的窗体显示了左边窗体选中的基本功能模块的所有子模块。
图3 “Simulink library Brower” 窗体1.1.2 窗体介绍在建模之前,你需要创建一个工作区域窗体。
创建一个工作区域的方法为,选择“File”项,然后再选择“New”菜单中的“Model”子菜单,这将弹出一个新的窗体,这个窗体就是用于构造系统模型,仿真等操作的工作区域,故称这个窗体为工作窗体。
云南开放大学《机电控制工程基础第2学期》形考作业3

机电控制工程基础()第2学期形考作业3某二阶系统的特征根为两个纯虚根,则系统的单位阶跃响应曲线表现为A:单调衰减B:单调上升C:等幅振荡D:振荡衰减参考选项:C设积分环节的传递函数为,则其频率特性幅值 A(ω)=A:B:C:D:参考选项:A在用实验法求取系统的幅频特性时,一般是通过改变输入信号的来求得输出信号的幅值。
A:相位B:频率C:稳定裕量D:时间常数参考选项:B某环节的传递函数为,它的对数幅频率特性L(ω)随 K 值增加而A:上移B:下移C:左移D:右移参考选项:A在转折频率附近,二阶振荡环节对数幅频特性将出现谐振峰值,其大小和有关。
A:阻尼比B:阻尼振荡角频率C:无阻尼自振荡频率D:放大系数参考选项:A理想微分环节对数幅频特性曲线是一条斜率为A:20dB/dec,通过ω=1 点的直线;B:-20dB/dec,通过ω=1 点的直线;C:-20dB/dec,通过ω=0 点的直线;D:20dB/dec,通过ω=0 点的直线;参考选项:A二阶系统的传递函数为;则其无阻尼振荡频率和阻尼比为A:1 ,1/2B:2,1C:1,0.25D:1/3,2/3参考选项:C系统如图所示,为一个装置,实现起来比较简单。
A:串联校正B:并联校正C:混合校正D:正反馈校正参考选项:C已知系统频率特性为,当输入为时,系统的稳态输出为A:B:C:D:参考选项:D理想微分环节对数幅频特性曲线是一条斜率为A:20dB/dec,通过ω=1 点的直线B:-20dB/dec,通过ω=1 点的直线C:-20dB/dec,通过ω=0 点的直线D:20dB/dec,通过ω=0 点的直线参考选项:A一阶系统的动态响应速度和其时间常数有关。
A:对B:错参考选项:A线性定常控制系统的稳定性(取决于系统的结构和参数,而与系统的初始条件和外部输入无关)和控制系统的外输入及自身的结构参数有关。
A:对B:错参考选项:A二阶系统在欠阻尼下阶跃响应表现为等幅振荡的形式。
串联校正的综合设计

TD
T2T3 T2 T3
(4)被控对象由若干个惯性环节组成时,有
G0
(s)
K1 T1s
1
K2 T2s
1
Kn Tns
1
K 可用一个较大惯性的惯性环节来近似,即令 G0 (s) Ts 1
其中, T T1 T2 T,n K K1K2 Kn 。
取期望模型为
G(s) 1 2Ts(Ts 1)
1
校正后系统的单位阶跃响应曲线和单位斜坡信号的跟踪误差曲线如下图所示。
调节时间 ts 0.3 s,满足要求。原系统不能跟踪斜坡信号,校正后使得跟踪斜坡
稳定性。
(2)截止频率 应c 尽可能大一些,以保证系统的快速性。
(3)低频段具有较高的增益,以保证系统的稳态精度。 (4)高频段应衰减快,以保证系统的抗干扰能力。
满足上述要求的模型有很多,在进行校正设计时通常取一些结构较简单的模 型,如二阶、三阶模型等。按这些典型的系统模型设计控制系统的校正装置,校 正装置通常采用PID调节器。
Gc
(s)
G(s) G0 (s)
串联校正系统
从频率特性角度来看,校正装置的对数幅频特性为
Lc () L() L0()
式中
L0 () ——原系统的开环对数幅频特性; Lc ()——校正环节的对数幅频特性;
L()——满足给定性能指标的期望开环对数幅频特性,通常称为“期望
特性”。
上式表明,在伯德图上,若根据设计指标给出了系统的期望特性曲线 L(),
对于最佳二阶系统,由式
K T1
0
n 2
1
2n
得
K0
1 2T1
所以最佳二阶系统的开环传递函数为
G(s)
自控实验报告超前校正(3篇)
第1篇一、实验目的1. 理解超前校正的原理及其在控制系统中的应用。
2. 掌握超前校正装置的设计方法。
3. 通过实验验证超前校正对系统性能的改善效果。
二、实验原理超前校正是一种常用的控制方法,通过在系统的前向通道中引入一个相位超前网络,来改善系统的动态性能。
超前校正能够提高系统的相角裕度和截止频率,从而改善系统的快速性和稳定性。
超前校正装置的传递函数一般形式为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K \) 为校正装置的增益,\( T_{s} \) 为校正装置的时间常数。
三、实验设备1. 控制系统实验平台2. 数据采集卡3. 计算机及仿真软件(如MATLAB/Simulink)4. 待校正系统四、实验步骤1. 搭建待校正系统模型:在仿真软件中搭建待校正系统的数学模型,包括系统的传递函数、输入信号等。
2. 分析系统性能:通过仿真软件分析待校正系统的性能,包括稳态误差、超调量、上升时间等。
3. 设计超前校正装置:根据待校正系统的性能要求,设计合适的超前校正装置参数。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
5. 实验数据分析:对实验数据进行分析,比较校正前后系统的性能差异。
五、实验内容1. 系统模型搭建:搭建一个简单的二阶系统模型,其传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]2. 系统性能分析:分析该系统的稳态误差、超调量、上升时间等性能指标。
3. 设计超前校正装置:根据系统性能要求,设计一个超前校正装置,其传递函数为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K = 2 \),\( T_{s} = 0.5 \)。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
第六章 控制系统的校正方法(二)
例6-7 已知系统的开环模型 要求: Kv ≥ 5,ts < 0.3秒, 5, 0.3秒, 试用二阶参考模型法作校正。
解: 1) 作固有特性 L0(ω) 2)作参考模型特性 L(ω) 由: Kv ≥ 5, ωc >5, 5, >5, 由: < 0.3,ωc >10 0.3, 2ωc = 20 由于固有系统的第二个转折为 ω = 30,取为校正后的转折频率 , 30,取为校正后的转折频率 则截止频率 为 ωc = 0.5ω1 =15
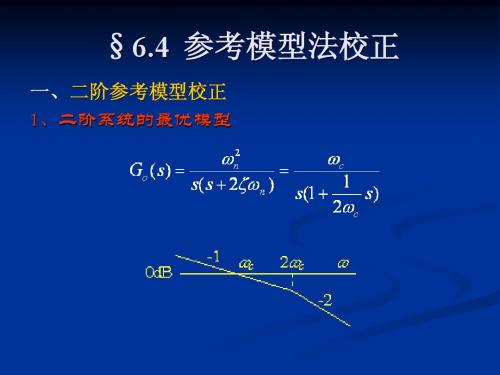
§6.4 参考模型法校正
一、二阶参考模型校正 1、二阶系统的最优模型
二阶参考模型的性能指标 1)开环频域指标 开环截止频率 ωc 转折频率 ω1 = 2ωc 相位裕度 γc =65.5° =65.5° 幅值裕度 Lg = ∞ 2)时域指标 超调量 Mp = 4.3 % 调节时间 速度误差系数 Kv = ωc
1、四阶参考模型 开环传递函数
各转折频率表为相对比值
四阶参考模型 特点:
(1)斜率变化为1-2-1-2-3型 斜率变化为 (2)初始段斜率为 -1,阶跃响应无差。 可以有差跟踪速度信号, (3)中频段穿越斜率为 -1, 调节ω2, ω3来调节中频 段宽度 h ,动态性能好。 (4)高频段衰减率为 -3,抑制高频噪声,转折位置 由ω4来调节。
3)闭环频域指标 闭环频带宽度 ωb = ωn 闭环谐振频率ωr = 0 闭环谐振峰值 Mr = 1
开环传函
闭环频率特性 假设系统的闭环频带宽度无限宽
解出
对于低频频谱分量 ω << ωn 为二阶系统的最优条件 2、二阶系统的开环参考模型 ζ=0.707时,二阶系统 =0.707时,二阶系统
上海开放大学开放本科机械电子工程专业
上海开放大学本科(专科起点)机械电子工程专业《自动控制原理》课程教学大纲(2013年9月13日审定)第一部分课程的性质、目的与任务一、课程的性质、目的与任务《自动控制原理》是机械电子工程本科专业的一门专业基础课程。
学习自动控制理论的基本概念、基本原理和自动控制系统的主要分析和设计方法,主要内容包括:建立线性连续定常系统的数学模型、用时域法和频域法分析控制系统、线性系统的校正和综合、采样控制系统分析等问题。
通过本课程的学习,使学生获得自动控制的基本理论和基本知识;掌握系统数学模型的建立方法,动态特性和静态特性的分析计算方法;针对机电一体化产品性能要求,具有初步分析设计系统的能力。
二、先修后续课程:先修课程:工程数学、电工电子技术等后续课程:电力传动控制系统、过程控制技术、机电一体化系统设计等。
第二部分教学内容与要求第一章绪论(4学时)一、教学要求1.了解自动控制发展简史和自动控制的基本概念。
2.正确理解开环控制、闭环控制、复合控制等自动控制方式及特点。
3.正确认识对控制系统的性能要求。
4.根据自动控制系统原理图,初步掌握绘制控制系统原理方框图的方法。
二、内容要点1.自动控制系统的基本概念和发展简史2.自动控制的基本方式3.自动控制的性能要求4.自动控制系统示例三、教学重点和难点重点:自动控制的基本方式、自动控制的性能要求难点:根据自动控制系统原理图绘制系统的原理方框图。
第二章控制系统的数学模型(12学时)一、教学要求1.熟悉拉氏变换的基本法则,熟记典型函数的拉氏变换。
2.掌握用拉氏变换求解微分方程的方法。
3.正确理解控制系统开环传递函数、闭环传递函数、误差传递函数等定义、性质及意义。
4.掌握系统结构图变换的基本法则,熟记典型环节的传递函数表达式;5.了解MATLAB在控制系统分析中的应用。
二、内容要点1.拉氏变换2.传递函数3.动态结构图及其等效变换4.典型环节的传递函数5.自动控制系统的传递函数6.MATLAB的应用7.示例-磁盘驱动读取系统三、教学重点和难点重点:典型环节的传递函数、自动控制系统的传递函数难点:动态结构图及其等效变换、传递函数的具体意义第三章时域分析法(12学时)一、教学要求1.正确理解单位阶跃响应及其时域性能指标(δ%、tp、ts、ess)的定义。
串联校正实验报告(3篇)

第1篇一、实验目的1. 了解串联校正的基本原理和设计方法。
2. 掌握利用串联校正装置改善系统性能的方法。
3. 通过实验验证串联校正对系统动态性能的影响。
二、实验原理串联校正是一种常用的控制系统设计方法,通过在系统的输入端或输出端添加校正装置,来改善系统的动态性能和稳态性能。
本实验主要研究串联校正对系统相位裕度和增益裕度的影响。
三、实验器材1. 控制系统实验平台2. 信号发生器3. 示波器4. 信号调理器5. 校正装置(如PID控制器、滤波器等)6. 计算机及仿真软件四、实验步骤1. 搭建实验系统:根据实验要求搭建控制系统实验平台,包括被控对象、校正装置和测量装置。
2. 设置实验参数:设置被控对象和校正装置的参数,如PID参数、滤波器参数等。
3. 进行开环实验:通过信号发生器向系统输入不同频率的正弦信号,利用示波器观察系统的输出响应,记录系统的相位裕度和增益裕度。
4. 进行闭环实验:将系统切换到闭环状态,再次输入正弦信号,观察系统的输出响应,记录系统的相位裕度和增益裕度。
5. 分析实验结果:比较开环和闭环实验结果,分析串联校正对系统性能的影响。
五、实验结果与分析1. 开环实验结果:通过开环实验,可以得到系统的相位裕度和增益裕度,以及系统的频率响应曲线。
2. 闭环实验结果:通过闭环实验,可以得到系统的相位裕度和增益裕度,以及系统的频率响应曲线。
3. 分析结果:- 当校正装置的参数设置合理时,系统的相位裕度和增益裕度会得到改善,从而提高系统的稳定性。
- 串联校正可以有效地抑制系统的振荡和超调,提高系统的响应速度。
- 串联校正对系统的稳态误差也有一定的影响,需要根据实际需求进行调整。
六、实验结论1. 串联校正是一种有效的控制系统设计方法,可以改善系统的动态性能和稳态性能。
2. 通过合理设置校正装置的参数,可以有效地提高系统的稳定性、响应速度和稳态精度。
3. 在实际应用中,需要根据被控对象和系统的具体要求,选择合适的校正装置和参数。
机械工程控制基础简答题

s 06答:控制系统是指系统的输出,能按照要求的参考输入或者控制输入进行调节的。
开环系统构 造简单,不存在不稳定问题、输出量不用测量;闭环系统有反馈、控制精度高、结构复杂、设 计时需要校核稳定性。
答:相位裕量是指在乃奎斯特图上,从原点到乃奎斯特图与单位圆的交点连向来线,该直线 与负实轴的夹角。
幅值裕量是指在乃奎斯特图上,乃奎斯特图与负实轴交点处幅值的倒数。
答: G (s) =K +K +K /sC P Ds I答:所谓校正(或者称补偿) ,就是指在系统中增加新的环节或者改变某些参数,以改善系统性能 的方法。
答:顺馈校正的特点是在干扰引起误差之前就对它进行近似补偿,以便及时消除干扰的影 响。
答:(1)传递函数反映系统本身的动态特性,只与本身参数和结构有关,与外界输入无关;(2) 对于物理可实现系统,传递函数分母中 s 的阶数必不少于份子中 s 的阶数; (3)传递函数不说明 系统的物理结构,不同的物理结构系统,只要他们的动态特性相同,其传递函数相同。
答:各项系数为正,且不为零,满足稳定的必要条件。
列出劳斯数列:s 4 4s 3 6 3s 2 3 6s 1 —25/3所以第一列有符号变化,该系统不稳定。
答: (1)当系统已定,并且输入知道时,求出系统的输出(响应),并通过输出来研究系统本身的有关问题,即系统分析。
(2)当系统已定,且系统的输出也已给定,要确定系统的输入应使输出尽可能符合给定的最佳要求,即系统的最佳控制。
(3)当输入已知,且输出也是给定时,确定系统应使得输出金肯符合给定的最佳要求,此即最优设计。
(4)当系统的输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此即系统识别或者系统辨识. (5)当系统已定,输出已知时,以识别输入或者输入中得有关信息,此即滤液与预测。
答:(1)在系统校正中,常用的性能指标按其类型可分为: (1)时域性能指标,它包括瞬态性能指标(即上升时间、峰值时间、最大超调量、调整时间等) 和稳态性能指标(即稳态误差). (2) 频域性能指标,它包括相位裕量、幅值裕量、频宽等。
一种基于零极点对消法的串联校正环节

信息:技术与应用信息记录材料 2019年4月 第20卷第4期1 引言在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用[1]。
自动控制系统的性能指标有时无法满足要求,因此需要设计结构和参数可以调节的装置进行校正。
控制系统校正方式可以分为串联校正、反馈校正、前馈校正和复合校正四种。
一般来说,串联校正设计比较简一种基于零极点对消法的串联校正环节杨风霞(重庆交通大学 重庆 400074)【摘要】针对自动控制系统的性能指标不能满足设计要求的情况,本文利用零极点对消法,对系统进行串联校正。
通过建立校正前系统的传递函数数学模型,研究了系统的性能指标,进而利用零极点对消法设计了校正环节,并利用MATLAB软件编程,对校正前后的系统进行了仿真分析。
【关键词】零极点对消法;串联校正;MATLAB【中图分类号】TP39 【文献标识码】A 【文章编号】1009-5624(2019)04-0154-02度。
2.2 高校体育教学配套设施情况从高校体育教学配套设施的使用情况而言,多媒体设施在完善之后可以对高校体育教学的整体情况有所改观,根据现在的实际情况来看,多媒体的配套设施价格比较高,想要在高校中建立一个比较先进的多媒体教室或者是网络技术中心将会花费较大的资金。
目前我国很多大学的体育课,都是在操场、体育馆以及健身房中完成的,相关理论课是在教室当中完成的,存在这种现象的原因地区之间的经济差异,根据有关调查显示,85%的高校中虽然在体育课上会应用部分多媒体教学设施,但是其多媒体设施都不全面,这对高校体育课教学质量的提升造成了一定的影响。
3 高校体育教学中应用多媒体技术的目的与优势3.1 目的高校体育课教学中应用多媒体的主要目的是帮助教师完成教学前的准备工作,并在教学中利用多媒体技术的优势提升教学质量。
3.2 优势在高校体育课教学当中,有些技术动作教师一遍遍讲解与示范技术动作,学生都不能够很好的掌握技术要领,而利用多媒体进行教学,可以发挥多媒体视频中的慢放、重复播放的特点,使学生对技术动作有充分的了解,对技术动作的时间、轨迹以及速度等都能力有效的控制,如此利用多媒体就给学生提供了一个比较高效的学习方式。
二阶控制系统校正的建模与仿真

拟电路如图2 所 示 硬 件 电 路 主 要 由 4 个集成运放和电阻、
设计有源超前校正环节电路如图5 所 示 参 数 取
_
m
p
T
} 10&0.
J
I 00 _ 00 00
— ——I cleo
图 2 二阶系统硬件模拟电路图
0PAMP_3T_BASIC
图 4 校正前的频率特性曲线
I 5
用 M atlab编
图 7 校正后的频率特性曲线
写 m文件, 计算校正目1」d后
的时域、频域性能指标[8-1()],如 表 1 所示。
I6 电 子 制 作 2 0 1 6 年 9 月
* [4]郭锁利,刘延飞等.基于M u ltisim 的电子系统设计、仿真与 综合应用[M].北 京 :人民邮电出版社,2012.
与 Multisim仿真结果基本一致。
5 •结论
针对加入校正环节
本文以丨型二阶系统为例,采 用 M ultisim 建立了硬件
的丨型二阶 系 统 的 硬 件 模拟电路,仿真分析了系统的阶跃响应和频率特性;设计了
模 拟电路,输入为单位 合理的有源超前校正环节,通过设置合理的校正参数,有
阶 跃 信 号 时 ,校正后的 效 改 善 了 系 统 的 性 能 ; 以 数 学 模 型 传 递 函 数 为 基 础 ,采用
§
20
知 , 系 统 超 调 参考文献
? _Leabharlann V 0 2. 量 减 小 , 达到 氺 [1]余 成 波 ,张 莲 ,胡 哓 倩 .自 动 控 制 原 理 [M].北 京 :清华出版
0>
< l
0
20 .
稳态时间缩短。
社 ,2012.
角随动系统数学建模及串联校正PPT学习教案

间ts<0.2s ,超调量σP<25%, 稳态误差ess=00,选择合理的
校正环节,对系统进行综合 校正,得出校正环节的参数。 请同学们自行推导 ;
第22页/共28页
III.系统调试
将II中得到的校正网络接入 系统,改变自整角机发送角 (不要太大,一般在300 左 右) ,观察电机的跟随情况
是否θo达到σp 预±5%期的θ指o 标σp 要±5求% , 如果θi 不满足要求θi ,采用凑试 法,根据各调节参数对系统 响应的ts 大致影t 响,ts 对校正t 网 络参数进行调整。
d(t) dt
(t )
(Ra
Cm fm CeCm )
ua
(t)
T由m d于dt(电t) 枢 电(t)路 电Km感ua (Lt)a较小,通常忽略不计,可化为: 则,传递函数为:G(s) (s) Km
ua (s) Tms 1
第16页/共28页
6.直流测速发电机
输入:转速,输出:与转速成正比的模拟电 压。
角随动系统数学建模及串联校正
会计学
1
角随动系统的数学建模及 串联校正(一) ——数学模型的建 立
第1页/共28页
实验考核
1、实验报告(预习报告、实验 报告);
2、综合测评(思考题、实验操 作) 。
第2页/共28页
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于二阶参考模型随动系统串联校正编号:审定成绩:重庆邮电大学移通学院毕业设计(论文)设计(论文)题目:基于二阶参考模型随动系统串联校正及仿真研究单位(系别):自动化系学生姓名:马强专业:电气工程与自动化班级:05130901学号:0513090125指导教师:汪纪锋答辩组负责人:汪纪锋填表时间:20 13 年 5 月重庆邮电大学移通学院教务处制重庆邮电大学移通学院毕业设计(论文)任务书设计(论文)题目基于二阶参考模型随动系统串联校正设计及仿真研究学生姓名马强系别自动化系专业电气工程与自动化班级05130901 指导教师汪纪锋职称教授联系电话 42871150教师单位重庆邮电大学移通学院下任务日期__ 2013 ____年__3__月_15_日学期第一周内交回各系,由各系进行统计并组织学生于第二周进行选题,确定选题后,交至辅导员于第三周发放给学生。
毕业设计于第四周开始进行。
重庆邮电大学移通学院毕业设计任务书(简明)技术资料一.设计题目:题目18 基于二阶参考模型随动系统串联校正设计及仿真研究二、系统说明:设二阶系统结构框图如所示二阶系统结构框图其中:Ω====Ω=50K2RRF,10CC;100KR025-21fR为线性滑动电位器,可调范围为:4-1R10~R10设计过程中可忽略各种干扰,比如:运算放大器的零点漂移,环节间的负载效应,外界强电力设备产生的电磁干扰等。
定义为原二阶系统开环传递函数。
其中:三、系统参量:系统输入信号:r(t);系统输出信号:y(t);四、设计指标:1.设定:在输入为r(t)=a+bt,(其中:a=5 b=1/ sec.)2.在保证静态指标ess≤0.8的前提下,要求动态期望指标:;五、设计要求:基于频率特性法,试用二阶参考模型法(即)设计串联校正装置,以使系统满足设计指标的要求。
重庆邮电大学移通学院:自动化系指导教师:汪纪锋日期: 2013.03 ()()()∆py sG s s()()-y()∆s r s s25(% = %)st s≤δ22ξ摘要自动控制在工程和科学领域起着很重要的作用,已经成为现代生产及工业过程中重要而不可缺少的组成部分。
在控制系统中设计分析系统的方法很多,主要有根轨迹法,频域法,状态变量法及其设置观测器法等。
实际系统中存在多种不同类型的系统。
根据它们是系统本身内在的,可以分为一阶,二阶,三阶,四阶以及高阶等。
到目前为止我们所讨论的线性定常系统的分析方法和设计方法,包括传递函数和拉普拉斯变换的应用。
在本文中,将要讨论的系统是线性定常二阶系统,主要研究其静态性能,动态性能,及其通过串联校正来使其达到预期的性能指标,最后通过软件进行仿真研究。
在控制系统的分析与综合设计中,首先要建立系统的数学模型。
控制系统的数学模型是描述系统内部的物理量(或变量)之间关系的数学表达式。
在自动控制理论中,数学模型有多种形式。
时域中常用的数学模型有微分方程,差分方程和状态方程;复频域中有传递函数,结构图;频域中有频域特性;S平面的根轨迹特性等。
自动控制原理课程设计是该课程的一个重要的教学环节,它既有别与毕业设计,更不同于课堂教学。
通过设计,锻炼同学自我发现问题,并且自主解决问题的能力。
它主要是培养学生运用自动控制原理课程中所学到的理论知识,掌握反馈控制系统的基本理论和方法,对工程实际系统进行完整的全面分析和综合。
【关键词】二阶仿真线性ABSTRACTAutomatic control plays a very important role in the fields of engineering and science has become an important and indispensable part of modern production and industrial processes. In the control system, many methods of design and analysis system, the main root locus method, frequency domain method, the state variable method and its settings Observer law. Actual system, there are a variety of different types of systems. Depending on whether they are within the system itself, can be divided into a first-order and second-order and third-order and fourth-order and higher-order, etc..So far we have discussed linear time-invariant systems analysis and design methods, including the transfer function and the Laplace transform application. In this article, the system to be discussed is the linear time-invariant second-order system, mainly to study the static performance, dynamic performance, and its series correction to make it to achieve the desired performance, and finally through software simulation studies.In the design and synthesis of analysis of control system, the first to establish the system mathematical model. The mathematical model of the control system is to describe the physical quantities within the system (or variable) mathematical expression of the relationship between. In control theory, the mathematical model has a variety of forms. The time domain mathematical model commonly used with differential equations, difference equations and equation of state; complex frequency domain transfer function, structure diagram; a frequency domain characteristics in the frequency domain; the S plane root locus characteristics.Automatic Control Theory course design is an important teaching aspect of the course, it has both do graduate design, different from the classroom teaching. Through design exercise students self-discovery problem, and independent problem-solving skills. It is mainly theoretical knowledge learned in the use of automatic control theory courses students master the basic theory and method of feedback control systems, complete a comprehensive analysis and synthesis of engineering systems.【Key words】Second Simulation Linear目录前言 (1)第一章控制系统的简介 (3)第一节线性控制系统 (3)第二节自动控制系统的性能指标 (3)第三节系统概述 (4)第四节设计基本要求 (4)第五节系统基本指标 (4)第二章系统建模 (5)第一节各环节模型建立 (5)2.1.1比较器 (5)2.1.2 比例环节 (5)2.1.3 积分环节 (6)2.1.4惯性环节 (6)第二节系统数学模型 (7)第三章系统分析 (8)第一节稳定性分析 (9)3.1.1Nyquist判据 (10)3.1.2劳斯判据 (10)第二节稳定(静态)精度分析 (12)3.2.1系统的跟踪能力 (12)3.2.2 误差计算 (13)第三节动态性能分析 (14)3.3.1动态平稳性分析%p (17)3.3.2动态快速性分析st (18)3.3.3 Bode图映证 (18)3.3.3.1截止频率的计算 (21)3.3.3.2计算c r (22)第四章 系统综合设计 (23)第一节 稳态性能指标 (23)第三节 超前校正 (24)第五节 滞后超前校正 (26)第六节 校正方案的确定 (26)第七节 设计校正规律和校正装置 (27)4.7.1 计算所需的相位超前裕度 (27)4.7.2计算衰减率 (27)4.7.3确定截止频率 (27)4.7.4确定截止频率 (27)4.7.5补偿增益 (27)4.7.6校正后的开环频率特性 (27)4.7.7校正后的截止频率和稳定欲度 (28)4.7.8校正后系统的波德图 (28)4.7.9校正后系统的nyquist 图 (29)第五章 系统物理模拟 (30)第一节 原系统物理仿真 (30)第二节 MATLAB 仿真 (32)5.2.1 MATLAB简介 ................................................................................................ 32 5.2.2 MATLAB /SIMULINK (33)第六章 设计总结 (38)第一节 设计体会 (38)第二节 致谢 (38)参考文献 (39)附录 英文文献 (40)一 英文原文 (40)二 英文翻译 (45)前言自动控制,就是在没有人参与的情况下,通过控制器或者控制装置来控制机器或者设备等物理装置,使得机器设备的受控物理量按照希望的规律变化,达到控制的目的。