立体观测释文
图像视差和立体观测培训课件

根据相似三角形原理,可得:
h r h
H
上式就是像片上因地形起伏引起的像点位移的计算公式,式中,r 为a点以像底点n为中心的像距,H为摄影航高 根据上式可以看出因地形起伏引起像点位移的规律 (1)当r =0时, δh =0,即水平像片的像主点处没有投影误差。 (影2)误像差点越的大位。移量δh与r成正比,即水平像片上距离像主点越远,投 地(3形)像平点坦的区位的移像量片δ没h与有h投成影正误比差,,相地对形高起差伏越越大大,地投区影的误像差片越投大影,误在 差越大,即影像畸变越大。像点位移方向在像点与像主点连线上, 高于基准面的点,像点背离像主点方向位移,低于基准面的点,向 像主点方向位移。
透镜式立体镜也称桥式立体镜(图5-14a)是由两 片透镜组成的,两透镜中心的距离可以调节。这种 立体镜的优点是:体积小、结构紧凑、携带方便、 价钱便宜。其缺点是观察的视野范围有一定的限度, 适应于对像幅不大的空中照片进行观察。
反光式立体镜(图5-14b)与透镜式立体镜相似, 它是由两组反射镜或棱镜与反射镜和两组透镜(有 的没有透镜)组成。这种立体镜有以下优点:其观 察基线是以外面两片反光镜的中心计算的,一般 比眼基线要大4倍(25厘米),适应于观察像幅较 大的空中照片,立体像对全部和大部分立体区域 都可在低放大倍率下看到;放大率较大时,只要 移动立体镜就可以看到照片上任何立体区域的立 体情况,而不必抬高、移动或剪裁照片。
人造立体视觉必须符合自然界立体观察的四个条件 (1) 两张像片必须是在两个不同位置对同一景物摄取立体像对:: (2) 两只眼睛必须只能观察像对的一张像片; (3) 两像片上相同景物(同名像点)的连线与眼基线应大致平 行; (4) 两像片的比例尺相近(差别≤15%)。
用上述方法观察到的立体与实物相似,称为正立体效应。如果
第四章 立体观察和立体量测4

第三节 像对的立体观察
建立人造立体视觉时,要求观察立体 像对的双眼分别只能观察其中的一张像 片,俗称分像. 观察时,一种是直接观察两张像片, 构成立体视觉,是借用立体镜来达到分 像.另一种是通过光学投影,将两张像 片的影像重叠投影在一起,称为分像法 的立体观察.
一,用立体镜观察立体
立体镜的主要作用是一只眼睛能清晰地 只看一张像片的影像. 最简单的立体镜是桥式立体镜,如下图 所示:
二,单测标量测法
单测标法是用一个真实测标去量测立体模 型,如图
第五节 像点坐标量测仪器
用解析方法处理摄影的像片时,都要首 先量测出像点的坐标x,y.量测这些数据的 专用一起,称为立体坐标量测仪.
蔡司(耶 拿) Stecomet er C型立 C型立 体坐标量 测仪
蔡司(上科恩)PSK型立体坐标量测仪 蔡司(上科恩)PSK型立体坐标量测仪
�
2,反立体效应 把左方摄站摄得的像片P1放在右方,用右眼观 察;右方摄站摄得的像片P2放在左方用左眼观察, 如图(b).这种立体效应称为反立体. 或是在组成正立体效应后,将左右像片各旋转 180°,如图(c),同样可得到一个反立体效应.
3,零立体效应 将正立体情况下的两张像片,在各自 的平面内按同一方向旋转90°,使像片 上纵横坐标互换了方向.像片上原来的 纵坐标y轴转到与基线平行,此时生理视 差变为像片的y方向的视差,因而失去了 立体感觉成为一个平面图像. 这种立体视觉,称为零立体效应.
第一节 人眼的立体视觉
一,人眼观察物体的远近
人眼是一个天然的光学系统,结构复杂.
摄影测量中,正是根据人眼的立体视觉,对同 一个地区要在两个不同摄站点上拍摄两张像片, 构成一个立体像对,进行立体观察与量测. 那么,人的双眼为什么能观察景物的远近呢? 由于两点在眼 中构像存在着生 理视差σ,此种 由交会角不同而 引起的生理视差, 通过人的大脑就 能作出物体远近 的判断.
立体观测的原理
立体观测的原理立体观测是一种通过同时观测目标物体的两个或多个视角来获取物体三维信息的技术。
它利用视差效应来推算目标物体的深度和形状,从而实现对物体的三维还原。
立体观测广泛应用于计算机视觉、机器人、虚拟现实等领域。
立体观测的原理可以分为两个基本步骤:视差计算和深度推算。
首先,当目标物体被观测者从不同的视角观察时,由于视角的不同,物体在两个视图中的位置会有微小的差异。
这种差异就是视差。
观测者的双眼视差主要是通过眼球的位置差异导致的。
当目标物体较远时,双眼视差很小;当目标物体较近时,双眼视差较大。
接下来,通过计算视差来推测目标物体的深度。
一种常用的方法是利用三角测量法。
在立体观测中,我们首先需要标定相机的内参和外参。
内参包括焦距和主点的坐标,而外参则包括相机在世界坐标系中的位置和姿态。
然后,利用标定结果,我们可以求得两个相机的基线长度。
基线长度是指两个相机的光心之间的距离。
接下来,通过对两个视图的像素坐标进行匹配,我们可以得到视差图。
一种常用的匹配算法是块匹配算法。
这个算法通过在一个视图中选取一个块,在另一个视图中寻找与之最匹配的块。
通过比较两个块的相似性,我们可以计算出该像素点的视差值。
最后,通过已知的基线长度和视差值,我们可以应用三角测量原理求解目标物体的深度。
三角测量利用了三角形的性质,通过知道了一个角和两条边的关系,就可以计算出第三边的长度。
在立体观测中,我们可以利用相机的参数和视差值,通过三角形相似性推算出目标物体所对应的深度。
需要注意的是,立体观测还有一些问题需要解决。
首先,视差计算中可能存在误匹配的问题,即将不同物体的特征误认为同一物体的特征,从而导致深度估计的不准确。
解决这个问题可以引入图像上的一些几何约束或使用更复杂的匹配算法。
其次,立体观测还需要考虑透视变换等因素对视差计算的影响。
这些问题都需要在具体应用中仔细研究和处理。
总之,立体观测通过利用视差效应来推算目标物体的深度和形状。
通过计算视差值和应用三角测量原理,我们可以获得目标物体的三维信息。
立体观察和立体观测

虚拟现实与增强现实
虚拟现实(VR)和增强现实(AR)技术是近年来发展迅速 的前沿科技,它们通过模拟和增强现实世界中的场景和物体, 为用户提供沉浸式的体验。立体观察和立体观测在VR和AR 中主要用于场景的构建和物体的展示。
通过立体观察和立体观测,VR和AR可以提供更为逼真的 场景和物体,使用户更加深入地了解和体验虚拟或增强现 实中的世界。
人工智能和机器学习在立体观测中的应用
通过深度学习和计算机视觉算法,实现自动化、智能化的立体观测,减轻人工操作负担, 提高观测效率和精度。
应用场景的拓展
无人驾驶技术
立体观测在无人驾驶领域具有广泛的应用前景,通过高精 度的环境感知,为无人驾驶车辆提供实时、准确的周围环 境信息,提升行车安全性和舒适性。
05
立体观察和立体观测的挑 战与解决方案
数据处理的挑战与解决方案
数据量庞大
随着遥感技术的不断发展,获取的立体观测数据量越来越大,给数据处理带来巨大挑战。 解决方案包括采用高效的数据压缩技术、优化数据处理算法以及利用高性能计算资源。
数据格式多样
不同遥感平台和传感器获取的立体观测数据格式多样,导致数据处理难度增加。解决方 案包括制定统一的数据格式标准、开发通用的数据转换工具以及提高数据处理软件的兼
率和生活品质。例如,在建筑、农业、医疗等领域,立体观测将有助于
实现精准定位、高效作业和智能化管理。
02
促进科技与产业的融合发展
立体观测技术的不断发展和应用将促进科技与产业的深度融合,推动相
关产业的转型升级和创新发展。同时,也将催生一批新的产业领域和经
济增长点。
03
保障人类安全和福祉
立体观测技术在安全防范、灾害监测、环境保护等领域的应用,将有助
第6章 立体观察
P′
其过程为:空间景物在感光材料上构像,再用人眼观察构像的像 片产生生理视差,重建空间景物的立体视觉,所看到的空间景物 为立体影像,产生的视觉为人造立体视觉。
空间物体
(空间物体)
交会角差
空间物体 构像信息
生理视差
生理视差
空间物体立体视觉
视觉的空间物体 的存在
借用空间物体的构像信息而在视觉上感受出空间物体的存 在,称为人造立体效能 根据人造立体视觉原理,在摄影测量中,规定摄影时保持像片的 重叠度在60﹪以上,是为了获得同一地面景物在两张像片上都有 影像,它完全类同于上述两玻璃片上记录的景物影像。利用相邻 像片组成的像对,进行双眼观察(左眼左片,右眼右片),同样 获得所摄地面的立体模型,并进行量测,这样就奠定了摄影测量 的基础,也是双像解析摄影测量量取像点坐标的依据。
提高人眼判断能力的方法
二、人造立体视觉
当我们用双眼观察空间远近不同的景物A、B A 两点时,两眼内产生生理视差,得到立体视觉, 可以判断景物的远近。若此时在双眼前各放置 B 一玻璃片,如图中P、P′,则A、B两点分别 得到影像a、b和a′、b′。若玻璃上有感光 材料,则景象分别记录在P、P′上。 a a′ b′ 当移开实物A、B,各眼观看各自玻璃 P 上的构像,仍能看到与实物一样的空间 b 景物A、B,这就是空间景物在人眼视网 膜上产生生理视差的人造立体视觉效应
第6章 立体观察
主要内容:
立体观察
立体视觉原理 人造立体视觉 立体观察
一、立体视觉原理
在双眼观察下能感觉出景物有远近凸凹的视觉,称为立体视觉
在双眼观察(立体观察)时,两眼水晶体中心之间的距离称为眼 基线br。眼基线的长度约为65mm 双眼观察A点时,两眼的视轴本能地交会于A点,A 交会角为r,A点在左右眼的视网膜上的构像为a, a′;观察B点时,交会角r+dr,在左右眼视网膜 r 上的构像为b,b′。由于交会角的差异,使得 两弧长ab,a′b′不等,其差称为生理视差 空间物体在两眼视网膜上形成的弧长 差,称为生理视差。生理视差通过视 神经传到大脑,通过大脑的综合,做 出景物远近的判断。生理视差是判断 景物远近的根源 r+dr O1 O2 b a′ b′
立体观察的实验报告3篇.doc

立体观察的实验报告3篇篇一:摄影测量实验立体观察一.目的1. 熟练掌握每种立体镜的使用方法,利用立体镜看出航片的立体效果。
2. 了解桥式立体镜和红绿立体镜的原理。
二.要求1.禁止大声喧哗,随意进出教室。
保持课堂秩序。
2.不得随意损坏涂抹照片,不得损坏眼镜,各小组组长负责仪器和像片完好无损,损坏像片和仪器的要进行赔偿。
三.仪器每组一套立体像对,一个桥式立体镜。
电脑一台,红绿立体镜,数字影像。
四.方法和步骤1. 拿到两张像片之后,首先观察像片上一样图案的部分,把它们按照规定的顺序摆放好。
2. 寻找同名像点,把立体镜摆放在同名像点的上方,左眼看左片的像点,右眼看右片的像点,仔细观察,直到看出高低起伏的感觉。
用立体镜进行像对立体观察时,首先要将像片定向。
像片定向是用针刺出每张像主点O1、O2,并将其转刺于相邻像片上O′1和O′2,在像片上画出像片基线O1O′2和O′1O2,再在图纸上画一条直线,使两张像片上基线O1O′2和O′1O2与直线重合,并使基线上一对相应像点间的距离略小于立体镜的观察基线。
然后将立体镜放在像对上,使立体镜观察基线与像片基线平行。
同时用左眼看左像,右眼看右像。
开始观察时,可能会有三个相同的影像(左、中、右)出现,这时要凝视中间清晰的目标(如道路、田地),如该目标在中间的影像出现双影,可适当转动像片,使影像重合,即可看出立体。
3、像对立体观察的立体效果在满足立体观察的条件下,随着两张像片放置方式的不同,就会产生不同的立体效应。
1)正立体效应如果把左方摄影站获得的像片放在左方用左眼观察;右方摄影站摄取的像片放在右方用右眼观察,这时获得与观察实物相似的立体效果,称为正立体效应。
2)反立体效应如果把左方摄站摄取的像片放在右方,用右眼观察,右方摄站摄取的像片放在左方用左眼观察,这时观察到的立体影像的立体远近恰好与实物相反,这种立体效应称为反立体,或者在组成正立体效应后,将左右像片各旋转180度,同样可获得一个反立体效应。
立体镜

立体观测原理 立体观测方法是摄影测量的一个重要手段。利 用相邻像片所组成的像对进行双眼观察时,可 重建空间景物的立体视觉,所产生的立体视觉 称人造立体视觉。利用立体像对与一对浮动测 标进行立体观测,测定左右片的同名像点,是 摄影测量的重要方法,也是立体摄影测量的基 础。 人造立体视觉必须符合自然界立体观过程中,为了保证观察着两眼分别只看 一张像片,以实现人造立体视觉,经常需要借助一些 辅助设备来达到分像的目的,以便实现立体观测,常 用的立体观测方式有: 立体镜观测法: 最简单的立体镜是桥式立体镜。桥式立体镜由于基线 太短,不利于观察大像幅的航摄像片。为了对大像幅 航摄像片进行立体观察,可改用焦距较长的透镜,并 在左右光路中各加入一对反光镜,起扩大眼基距的作 用,这一类的立体镜称反光立体镜。
两张像片必须是在两个不同位置对同一景物摄取的 立体像对; 每只眼睛必须只能观察像对中的一张像片; 两像片上相同景物(同名像点)的连线与眼基线应 大致平行; 两像片的比例尺应相近,否则需用ZOOM系统进行调 节。 用上述方法观察到的立体与实物相似,称为正立体效 应。如果把像对的左右像片对调,左眼看右像片,右眼 看左像片,或者把像对在原位旋转180°,这样产生的生 理视差就改变的符号,导致观察到的景物远近效果正好 与实际景物相反,这称为反立体效应。
立体影像观察的实验报告(3篇)
第1篇一、实验目的1. 理解立体影像的观察原理和过程。
2. 掌握使用立体镜观察立体影像的方法。
3. 分析立体影像中同名像点的识别与匹配。
4. 了解立体影像在摄影测量中的应用。
二、实验原理立体影像观察是基于双眼视觉原理,通过观察两个不同视角拍摄的影像,在大脑中形成三维空间的感知。
实验过程中,需要确保两张影像在空间位置、比例尺和同名像点等方面的一致性,以实现立体视觉效果。
三、实验仪器与材料1. 桥式立体镜2. 两对立体像片3. 纸、笔等记录工具四、实验过程1. 实验准备- 将两对立体像片准备好,确保每对像片都由左片和右片组成。
- 熟悉立体镜的结构和使用方法。
2. 立体影像观察- 将左片和右片分别放入立体镜的左右两侧。
- 通过立体镜观察两张影像,注意调整立体镜的焦距,使影像清晰。
- 观察过程中,注意以下要点:- 判断影像中物体的远近。
- 识别同名像点,即左片和右片中对应同一物体的像点。
- 分析立体影像中物体的空间关系。
3. 同名像点识别与匹配- 在左片和右片中寻找同名像点,确保它们的位置关系与实际空间关系一致。
- 使用纸和笔记录同名像点的位置,以便后续分析。
4. 立体影像分析- 根据同名像点的位置,分析立体影像中物体的空间关系。
- 记录观察到的现象和结论。
5. 实验总结- 对实验过程进行总结,包括实验方法、观察结果和分析结论。
- 分析实验过程中遇到的问题和解决方法。
五、实验结果与分析1. 立体影像观察结果- 成功观察到立体影像,感受到物体的三维空间效果。
- 能够识别同名像点,并分析其位置关系。
2. 同名像点识别与匹配- 在左片和右片中成功识别同名像点,并记录其位置。
- 分析同名像点的位置关系,与实际空间关系一致。
3. 立体影像分析- 通过同名像点的分析,成功判断出物体的远近和空间关系。
- 实验结果与预期相符。
六、实验结论1. 立体影像观察是一种有效的三维空间感知方法。
2. 使用立体镜观察立体影像,能够帮助识别同名像点和分析物体空间关系。
立体观察的实验报告3篇
立体观察的实验报告3篇篇一:摄影测量实验立体观察一.目的1. 熟练掌握每种立体镜的使用方法,利用立体镜看出航片的立体效果。
2. 了解桥式立体镜和红绿立体镜的原理。
二.要求1.禁止大声喧哗,随意进出教室。
保持课堂秩序。
2.不得随意损坏涂抹照片,不得损坏眼镜,各小组组长负责仪器和像片完好无损,损坏像片和仪器的要进行赔偿。
三.仪器每组一套立体像对,一个桥式立体镜。
电脑一台,红绿立体镜,数字影像。
四.方法和步骤1. 拿到两张像片之后,首先观察像片上一样图案的部分,把它们按照规定的顺序摆放好。
2. 寻找同名像点,把立体镜摆放在同名像点的上方,左眼看左片的像点,右眼看右片的像点,仔细观察,直到看出高低起伏的感觉。
用立体镜进行像对立体观察时,首先要将像片定向。
像片定向是用针刺出每张像主点O1、O2,并将其转刺于相邻像片上O′1和O′2,在像片上画出像片基线O1O′2和O′1O2,再在图纸上画一条直线,使两张像片上基线O1O′2和O′1O2与直线重合,并使基线上一对相应像点间的距离略小于立体镜的观察基线。
然后将立体镜放在像对上,使立体镜观察基线与像片基线平行。
同时用左眼看左像,右眼看右像。
开始观察时,可能会有三个相同的影像(左、中、右)出现,这时要凝视中间清晰的目标(如道路、田地),如该目标在中间的影像出现双影,可适当转动像片,使影像重合,即可看出立体。
3、像对立体观察的立体效果在满足立体观察的条件下,随着两张像片放置方式的不同,就会产生不同的立体效应。
1)正立体效应如果把左方摄影站获得的像片放在左方用左眼观察;右方摄影站摄取的像片放在右方用右眼观察,这时获得与观察实物相似的立体效果,称为正立体效应。
2)反立体效应如果把左方摄站摄取的像片放在右方,用右眼观察,右方摄站摄取的像片放在左方用左眼观察,这时观察到的立体影像的立体远近恰好与实物相反,这种立体效应称为反立体,或者在组成正立体效应后,将左右像片各旋转180度,同样可获得一个反立体效应。
摄影测量学 第三章 人眼的立体视觉和立体观测

白光照射
白
a2(绿)
光闸法
在投影的光线中安装光闸,两个光闸相互 错开
观测者带上与投影器中光闸同步的光闸眼镜
偏振光法
在两投影光路中安装两块偏 振 平面互成90°的偏振器
观测者带上一副检偏镜 镜片的偏振平面相互垂直, 左右分别与投影的左右偏振 平面相互垂直
液晶闪闭法
人眼的立体视觉与立体观测
主要内容
பைடு நூலகம்一、人眼立体视觉原理
二、人造立体视觉 三、像对的立体观察
§3.1.1 人眼立体视觉
人 眼 基 本 构 造
图3.1 人眼的结构
人眼好像一个完善的自动调光的摄影机—— 水晶体如同物镜,瞳孔如同光圈,网膜像底 片。
人 眼 立 体 视 觉
单眼观察:景物的中心构像,单张像片;
者眼睛的距离不相等。
fc f 为夸大系数,f c为观察立体时像片距人眼的 距离250mm,等于人眼的明视距离
重叠影式观察立体
互补色加法
在投影器中插入互补色滤 光片 (品红色、蓝绿色) 观测者双眼分别带上同色
镜片
互补色减法
在白纸上分别用品红、 绿互补色印刷一对像片, 观测者左右眼分别戴上 品红、绿互补色眼镜, 在明室对立体图画进行 观察。
立体镜观察
桥式立体镜
在一个桥架上安置两个相同的简单透镜
透镜光轴平行,间距约为眼基距,高度等于透镜主距
立体镜观察立体
反光立体镜
在左右光路中各加入一对反光镜扩大像片间距,可 对大像幅进行立体观察。
结果:立体模型与实物不一样,主要是在竖直方向夸 大了,地面的起伏变高,有利于高程量测。
原因:航摄像片的主距与观察时像片所在位置距观察
第三次课双像立体测图基础与立体测图演示文稿
第7页,共33页。
第四章 双像立体测图基础与立体测图
§ 4-2 立体像对与双像立体测图
摄影基线
S1
同名像点
p1 l1
核面
S2
同名核线
p2 l2
同名像点必在同名核线上
A
第8页,共33页。
§4-3 双像解析摄影测量概念
• 双像解析摄影测量: • 根据立体像对中的物像几何关系,用数学计算方法
F
F0
F
d
F
d
F
d
F
d
F
dk
0
偏导系数表达式示例:
F
bX u1
bX
v1
bX
w1
u2 v2 w2
01 0
bX u1 v1 w1 bX (w1u2 w2u1) u2 v2 w2
第22页,共33页。
立体像对的相对定向—共面条件方程
对F展开式整理得:
Q=bX
d
v2 w2
bX
dv
( u2v2 w2
) N 2 d
绝对定向元素:
七个,包括模型旋转、平移和缩放
第27页,共33页。
立体模型的解析法绝对定向
一、解析绝对定向的基本公式
空间相似变换:
X U X S
Y
=RV
+ YS
Z W ZS
X
Y
模型点的 地面摄影
Z 测量坐标
U
V
模型点在 像空间辅
W
助坐标系 中的坐标
至少需两个平高控制点和一个高程控制点,或者两个
觉到与实物一样的地面景物存在。这种 观察立体像对得到景物立体影像的 立体感觉称为人造立体视觉。
立体视觉测量技术在工程测量中的应用
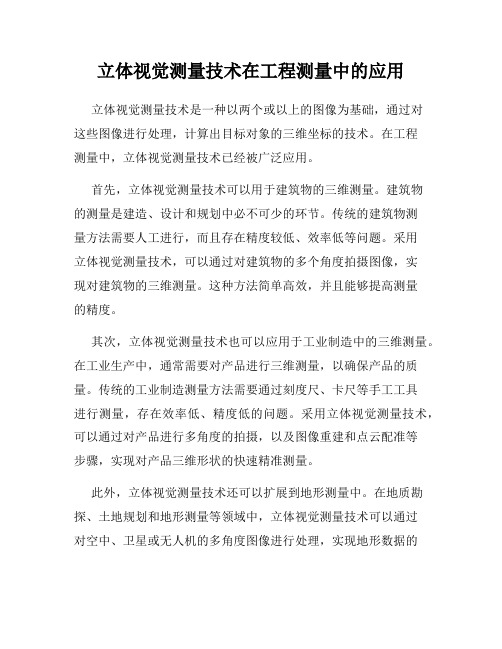
立体视觉测量技术在工程测量中的应用立体视觉测量技术是一种以两个或以上的图像为基础,通过对这些图像进行处理,计算出目标对象的三维坐标的技术。
在工程测量中,立体视觉测量技术已经被广泛应用。
首先,立体视觉测量技术可以用于建筑物的三维测量。
建筑物的测量是建造、设计和规划中必不可少的环节。
传统的建筑物测量方法需要人工进行,而且存在精度较低、效率低等问题。
采用立体视觉测量技术,可以通过对建筑物的多个角度拍摄图像,实现对建筑物的三维测量。
这种方法简单高效,并且能够提高测量的精度。
其次,立体视觉测量技术也可以应用于工业制造中的三维测量。
在工业生产中,通常需要对产品进行三维测量,以确保产品的质量。
传统的工业制造测量方法需要通过刻度尺、卡尺等手工工具进行测量,存在效率低、精度低的问题。
采用立体视觉测量技术,可以通过对产品进行多角度的拍摄,以及图像重建和点云配准等步骤,实现对产品三维形状的快速精准测量。
此外,立体视觉测量技术还可以扩展到地形测量中。
在地质勘探、土地规划和地形测量等领域中,立体视觉测量技术可以通过对空中、卫星或无人机的多角度图像进行处理,实现地形数据的三维建模和测量。
这种方法具有操作简单、速度快、成本低等优点。
综上所述,立体视觉测量技术在工程测量中有着广泛的应用前景,同时也存在一些挑战和问题。
其中最主要的问题是图像重建与配准的精度问题。
此外,针对不同的测量对象和测量环境,需要采用不同的立体视觉测量技术,并结合其他测量方法进行优化和综合。
因此,我们需要进一步加强各方面的研究和探索,以更好地将立体视觉测量技术应用于工程测量中,推动工程测量技术的发展。
实习四 立体观察.
• 框标 像片四边的中部黑色箭头(或在像片四角隅的 “×”标志),称为框标。对称的两框标连线的交点为 像片中心点,通常与像主点重合。
• 时表 记录本张像片的拍摄时刻。 • 水准器 水准气泡团说明本张像片摄影时光轴的倾斜状
况。水准气泡居中时水平。水准器上的同心圆,每圈为 1°(或0.5°),读数从中心算起。 • 压平线 像片四边井字形直线叫压平线,其弯曲度说明 摄影时感光胶片未压平而产生的影像变形情况。 • 像片编号 表示航摄区的位置、摄影时间、本张像片在 整个图幅及本条航线内的顺序。像片编号是在航空摄影 完毕整理资料时,以反体字写在底片的药面上,印成像 片后成正体字。
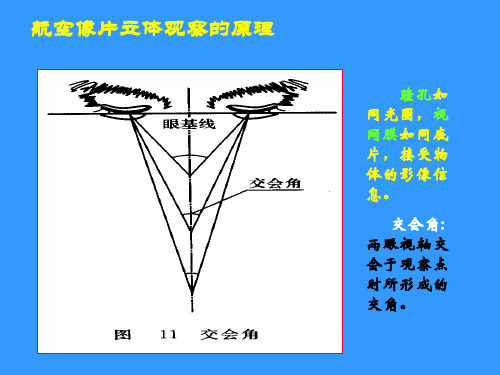
航空像片立体观察的原理
瞳孔如 同光圈,视 网膜如同底 片,接受物 体的影像信 息。
交会角: 两眼视轴交 会于观察点 时所形成的 交角。
生理视差的形成: 人们是从眼基线 的两个端点来观 察物体(右眼从 右边观察物体, 左眼从左边观察 物体),因此两 眼的观察角度就 不同,在两眼网 膜上所产生的物 体影像就有差别, 即形成了生理视 差。
生理视差是产生立体视觉和判断景物远近的原因。
立体观察是根据立体视觉原理进行的。实施立体 观察,必须是在连续拍摄的两张空中照片的重叠 部分上进行的。
人造立体视觉:空间景物在感光材料上构像,再用 人眼观察构像的像片产生生理视差,重建空间景物的立 体视觉,所看的空间景物称为立体影像,产生的立体视 觉称为人造立体视觉。
实习一 航空像片立察的方法。 立体观察是地理工作者的一项基本功,特别是在山区, 立体观察能提高判读的效果,因此必须学会立体观察。
二、要求:
每个学生都要学会立体观察。
三、实习仪器
立体观察量测实习讲座新演示文稿

第十四页,共23页。
四、像对的立体量测
第十五页,共23页。
两个概念:
左右视差——像点在两张像片上横坐标之差 左右视差较——两点左右视差的差
我们应该还记得: δ =
现在我们研究怎么计算 h
h
r
H
第十六页,共23页。
a1 c1
4、以像主点为原点、像片基线方向为坐标横轴,建立坐标系统 5、设已知点航高3000米,高程650米(已知点最好选像主点附近) 6、列表计算各未知点与已知点间高差和各未知点高程; 7、试画出一片山地区域(或一片高地)的等高线。
第二十三页,共23页。
C
h
A
– 在 △P = B f h / HA(HA h) 中
B f / HA为摄影基线在像片上的距离,我们称之为“像片基线”,以 b 表示,即 o1 o2
– ∴ △P = b h / (HA h)
∴ h = △P HA /(b+ △P ) 或者: h ≈ △P HA / b
………………………………… (5) (因为△P 值通常很小,在分母中的贡献很小,可以忽略)
a1 c1
o1 o´2
S1
B
a´2 c´2 o1
P1 a1 c1
a2
c2
o´1 o2
S2
a2 c2 o2
P2 HC HA
C
h
∵ a´2 a1 =a´2 o1 + o1 a1
A 其中:o1 a1 = Xa1
a´2 o1 = — o2 a2 = Xa2
∴ a´2 a1 = Xa1 — Xa2 (即等于A点在像对上的横坐标之差,即左右视差)
卫星立体观测 世纪空间

卫星立体观测世纪空间
卫星立体观测是一种利用卫星提供的空间信息,对地球上的某一区域进行立体观测的方法。
卫星立体观测具有视野开阔、分辨率高、时间连续性好的特点,是地球观测的重要手段之一。
"世纪空间"是指21世纪以来的空间探索活动。
在这个时期,人类进行了大量的空间探索和开发,取得了许多成就。
例如,人类成功地派遣了探月车到月球、发射了多枚卫星进行观测、在国际空间站进行长期停留等。
"世纪空间"中的卫星立体观测是指利用21世纪以来发射的卫星进行立体观测的活动。
这些卫星可以提供高分辨率的空间信息,为地球观测、气象预报、农业生产、环境监测等领域提供有价值的数据。
例如,卫星立体观测可以用来监测土地利用变化、森林覆盖变化、植被生长情况等,为决策提供依据。
卫星立体观测的应用领域十分广泛,能够为人类社会发展提供重要的支持。
在未来,随着卫星技术的不断发展,卫星立体观测的应用范围将会进一步扩大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
立体观测释文:利用人眼借助立体镜对立体像对进行观察和测量的过程。
当用立体镜观察立体像对时,像片上影像的不同左右视差反映到双眼就构成生理视差,从而产生与实物一样的立体感觉。
具有纵向或旁向重叠的两幅遥感图像可以构成立体像对;而对雷达图像来说,同一地区不同视向的雷达图像也可以构成立体像对。
通过立体观测叮以确定物体的形状和高度,有助于识别物体的性质和类型。
实现立体观测的方法很多,除立体镜外,尚有互补色立体、闭闪法立体、双像投影、双像放映、偏振光、激光干涉全息等立体视觉等。
立体效应释文:在天然实体三维观察和人造立体观测中,由于人眼的生理视差能够感觉、判断物体的远近和立体模型的高低起伏,物体表面的凹凸变化,即可察觉出的细微的视差量,称为立体的感觉,或景深感觉。
立体像对上同名地物景点的左右视差反映在人眼中形成生理视差,产生立体视觉效应。
由于左右像片的安置关系可以产生正立体和负立体效应。
当立体像对基线与眼基线垂直安放时,就会失去立体效应,称为零位立体效应。
航空摄影测量-正文根据在航空飞行器上拍摄的地面像片,获取地面信息,测绘地形图。
主要用于测绘1:1000~1:100000各类比例尺的地形图。
航摄像片是航空摄影测量的基本资料,是用画幅式航摄机,按照严格的航摄要求摄得的(见航空摄影)。
原理单张像片测图的基本原理是中心投影的透视变换,而摄影过程的几何反转则是立体测图的基本原理。
广义来说,前一情况的基本原理也是摄影过程的几何反转。
20世纪30年代以后,摄影过程的几何反转都是应用各种结构复杂的光学机械的精密仪器来实现的。
50年代,开始应用数学解析的方式来实现。
图1就是用光学投影方法实现摄影几何反转的示意图。
图中假设两张相邻的航摄像片覆盖了同一地面AMDC,它们在左片P1上的构像为ɑ1m1d1c1,右片P2上的构像为ɑ2m2d2c2,两摄站点S1和S2间的距离为基线B。
如将这两张像片装回与摄影镜箱相同的投影器内,后面用聚光器照明,就会投射出同摄影时相似的投影光束。
再把这两个投影光束安置在与摄影时相同的空间方位,并使两投影中心间的距离为b(b为按测图比例尺缩小的摄影基线),此时所有的同名投影光线都应成对相交,从而得出一个地面的立体模型A'M'D'C'。
这时, 用一个空间的浮游测标(可作三维运动)去量测它,就可画得地形图。
理论航空摄影测量的主题,是将地面的中心投影(航摄像片)变换为正射投影(地形图)。
这一问题可以采取许多途径来解决。
如图解法、光学机械法(亦称模拟法)和解析法等。
在每一种方法中还可细分出许多具体方法,而每种具体方法又有其特有的理论。
其中有些概念和理论是基础性的,带有某些共性,如像片的内方位元素和外方位元素,像点同地面点的坐标关系式,共线条件方程,像对的相对定向,模型的绝对定向和立体观测原理等。
像片的内方位元素和外方位元素内方位元素用以确定摄影物镜后节点(像方)同像片间的相关位置。
利用它可以恢复摄影时的摄影光线束。
内方位元素系指摄影机主距 f和摄影机物镜后节点在像平面的正投影位于框标坐标系中的坐标值(x0,у0)。
这些数值通过对航摄机鉴定得出,故内方位元素总是已知的。
确定摄影光线束在摄影时的空间位置的数据,叫做像片或摄影的外方位元素。
外方位元素有6个数值,包括摄影中心S(图2)在某一空间直角坐标系中的3个坐标值X s、Y s、Z s和用来确定摄影光线束在空间方位的3个角定向元素,如嗘、ω、k角。
这些外方位元素都是针对着某一个模型坐标系O-XYZ而定义的。
模型坐标系的X坐标轴近似地位于摄影的基线方向,Z坐标轴近似地与地面点的高程方向相符。
在模型坐标系内所建立的立体模型必须在其后经绝对定向的过程才能取得立体模型的正确方位。
像点坐标变换式图2中,像点ɑ在以摄影中心S为原点,摄影主光轴z坐标轴的像空间坐标系(S-xуz)中的坐标为xɑ、уɑ、zɑ=-f。
此时以S为原点再建立一个辅助坐标系(S-uvw)其中3个坐标轴u、v、w分别与模型坐标的3个坐标轴X、Y、Z相平行。
ɑ点在此辅助坐标系中的坐标设为uɑ、vɑ、wɑ,则其变换关系式为:R为旋转矩阵,它是由像空间坐标系与辅助坐标系的相应坐标轴间夹角的余弦(称方向余弦)组成,而这些方向余弦都是像片的3个角定向元素的函数。
这是一个重要的基本公式,因为有很多理论公式或作业公式就是在此基础上进一步演化得出的。
例如,在解析摄影测量中有广泛应用的“共线条件方程式”,就是根据它的反算式作进一步演化得出。
相对定向确定像片对相互位置关系的过程。
模拟法相对定向是在立体测图仪上进行。
其理论基础是使空间所有的同名光线都成对相交。
当同名光线不相交时,则在仪器的观测系统中可以观察到上下视差(常用Q表示)。
上下视差就是两条同名射线在空间不相交时在垂直于摄影基线方向中存在的距离。
此时将投影器作微小的直线移动或转动,就可以消除这个距离。
理论上只要能够在适当分布的 5个点处同时消除该点处的上下视差,就认为已经获得在这个立体像对内全部上下视差的消除,从而完成了相对定向,得出立体模型。
相对定向的解析法是在像片上量测各同名像点的像点坐标,例如对左像片为x1、у1,对右像片为x2、у2。
根据同名射线共面条件的理论可以推导出这些量测值与相对定向元素的关系式。
理论上测得5对同名像点的像点坐标值,就能够解算出该像片对的 5个相对定向元素。
同名点在左右像片上的纵坐标差-у2)习惯上也称之为上下视差,用符号q表示。
(у1模型的绝对定向在摄影测量中,相对定向所建立的立体模型常处在暂时的或过渡性的模型坐标系中,而且比例尺也是任意的,因此必须把它变换至地面测量坐标系中,并使符合规定的比例尺,方可测图,这个变换过程称为绝对定向。
绝对定向的数学基础是三维线性相似变换,它的元素有7个:3个坐标原点的平移值,3个立体模型的转角值和1个比例尺缩放率。
立体观测原理立体观察的原理是建立人造立体视觉,即将像对上的视差反映为人眼的生理视差后得出的立体视觉(图3)。
得到人造立体视觉须具备3个条件:①由两个不同位置(一条基线的两端)拍摄同一景物的两张像片(称为立体像对或像对);②两只眼睛分别观察像对中的一张像片;③观察时像对上各同名像点的连线要同人的眼睛基线大致平行,而且同名点间的距离一般要小于眼基线(或扩大后的眼基距)。
若用两个相同标志分别置于左右像片的同名像点上,则立体观察时就可以看到在立体模型上加入了一个空间的测标。
为便于立体观察,可借助于一些简单的工具,如桥式立体镜和反光立体镜。
对于那种利用两个投影器把左右像片的影像同时叠合地投影在一个承影面上的情况,可采用互补色原理或偏振光原理进行立体观察,并用一个具有测标的测绘台量测。
作业航空摄影测量需要进行外业和内业两方面的工作。
航测外业工作包括:①像片控制点联测。
像片控制点一般是航摄前在地面上布设的标志点,也可选用像片上的明显地物点(如道路交叉点等),用普通测量方法测定其平面坐标和高程。
②像片调绘。
是图像判读、调查和绘注等工作的总称。
在像片上通过判读,用规定的地形图符号绘注地物、地貌等要素;测绘没有影像的和新增的重要地物;注记通过调查所得的地名等。
通过像片调绘所得到的像片称为调绘片。
调绘工作可分为室内的、野外的和两者相结合的3种方法。
③综合法测图。
主要是在单张像片或像片图上用平板仪测绘等高线。
航测内业工作包括:①测图控制点的加密。
以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建立单航线模拟的空中三角网,进行控制点的加密工作。
20世纪60年代以来,模拟法空中三角测量逐渐地被解析空中三角测量代替(见空中三角测量)。
②用各种光学机械仪器测制地形原图。
测图方法20世纪30年代以来,航空摄影测量的测图方法主要有3种,即综合法、全能法和分工法(或称微分法)。
航空摄影测量的综合法是摄影测量和平板仪测量相结合的测图方法。
地形图上地物、地貌的平面位置由像片纠正的方法得出像片图或线划图,地形点高程和等高线则用普通测量方法在野外测定。
它适用于平坦地区的大比例尺测图。
航空摄影测量的全能法是根据摄影过程的几何反转原理,置立体像对于立体测图仪内,建立起所摄地面缩小的几何模型,借以测绘地形图的方法(图4)。
在立体测图仪上安置像片时依据内方位元素,目的是使恢复后的投影光束同摄影光束相似(也可在一定条件下变换投影光束)。
由于像对的相对定向过程中并未加入控制点,只利用了像对内在的几何特性,所以建立的几何模型的方位是任意的,模型的比例尺也是近似值,因此必须通过绝对定向才能据以测图。
全能法测图的仪器是立体测图仪。
这类仪器形式繁多,根据投影系统的结构可分为3种类型:①建立实际投影光线束的光学投影式的;②从投影中心至像点一方为实际的投影光线,而从投影中心至模型点一方则用方向导杆代替的光学机械投影式的;③用一根贯穿3个万向关节(它们分别代表像点、投影中心和模型点)的方向导杆来代替投影光线的机械投影式的。
前两种型式的仪器现已基本淘汰了。
立体测图仪的结构均须有投影系统、观测(观察和量测)系统和绘图系统等几个主要部分。
使用立体测图仪进行相对定向和绝对定向,是通过两个投影器的角运动(少数仪器也有直线移动)和测标架上测标的安置动作来实现的。
定向之后,可以通过立体观测,利用仪器上的测标点在地面的立体模型上进行地物和地貌的测绘。
有的仪器还可以处理地面摄影的像片,有的可在仪器上作空中三角测量。
立体测图仪自1930年问世以来,发展到60年代达到高峰,以后主要是发展仪器外围设备,例如电子绘图桌、正射投影装置(见正射影像技术)以及坐标记录装置等。
电子绘图桌有多种功能,可以自动地做某些内容的绘图工作。
航空摄影测量的分工法(微分法)是按照平面和高程分求的原则进行测图的一种方法。
使用的主要仪器是立体量测仪。
它是根据竖直摄影像对,量测左右视差较和在右方像片上勾绘等高线的一种仪器。
一个地面点在左、右两张像片上构像点的横坐标x的差值称左右视差p,而两个地面点的左右视差之差则称之为左右视差较Δp,这个Δp是该两点的高程差所引起的。
在量测左右视差较Δp的过程中,借助仪器上的改正机件,自动改正由摄影外方位元素带来的影响,使之等于理想像对的左右视差或左右视差较;而用高差公式计算高程差;然后用投影转绘仪把在像片上勾绘的等高线以及调绘的地物,进行分带投影转绘成地形图。
中国设计制造的X-2型视差测图仪是在立体量测仪的基础上,另加平面改正机件,改进后的仪器,在使用中可把分工法测图中的两个步骤一次解决,从而提高了作业效率。
意大利、联邦德国也有类似的仪器。
航空摄影测量的成图方法和仪器正在向着半自动化和自动化方向发展,在这方面解析测图仪已经有了相当的成就。
(见彩图)空中三角测量-正文航空摄影测量中利用像片内在的几何特性,在室内加密控制点的方法。