数字信号处理 第四章 答案
《数字信号处理》(2-7章)习题解答

第二章习题解答1、求下列序列的z 变换()X z ,并标明收敛域,绘出()X z 的零极点图。
(1) 1()()2nu n (2) 1()()4nu n - (3) (0.5)(1)nu n --- (4) (1)n δ+(5) 1()[()(10)]2nu n u n -- (6) ,01na a <<解:(1) 00.5()0.50.5nn n n zZ u n z z ∞-=⎡⎤==⎣⎦-∑,收敛域为0.5z >,零极点图如题1解图(1)。
(2) ()()014()1414n nn n z Z u n z z ∞-=⎡⎤-=-=⎣⎦+∑,收敛域为14z >,零极点图如题1解图(2)。
(3) ()1(0.5)(1)0.50.5nnn n zZ u n z z --=-∞-⎡⎤---=-=⎣⎦+∑,收敛域为0.5z <,零极点图如题1解图(3)。
(4) [](1Z n z δ+=,收敛域为z <∞,零极点图如题1解图(4)。
(5) 由题可知,101010910109(0.5)[()(10)](0.5)()(0.5)(10)0.50.50.50.50.50.5(0.5)n n nZ u n u n Z u n Z u n z z z z z z z z z z z --⎡⎤⎡⎤⎡⎤--=--⎣⎦⎣⎦⎣⎦⋅=-----==--收敛域为0z >,零极点图如题1解图(5)。
(6) 由于()(1)nn n a a u n a u n -=+--那么,111()(1)()()()nn n Z a Z a u n Z a u n z z z a z a z a a z a z a ----⎡⎤⎡⎤⎡⎤=---⎣⎦⎣⎦⎣⎦=----=-- 收敛域为1a z a <<,零极点图如题1解图(6)。
(1) (2) (3)(4) (5) (6)题1解图2、求下列)(z X 的反变换。
数字信号处理课后答案第3和4章fb

[e 2
n0
N 1
j 0 n
e
]e
j N j N 1 e 0 1 e 0 2π 2π j( 0 k) j( 0 k) 2 N N 1 e 1 e
第3章
离散傅里叶变换(DFT)及其快速算法 (FFT)
解法二
因为
由DFT共轭对称性可得同样结果。
离散傅里叶变换(DFT)及其快速算法 (FFT)
(6)
2π kn X (k ) cos mn W N N n0
N 1
N 1
1 2
j
2π N
mn
(e
e
-j
2π N
mn
-j
2π N
kn
)e
n0
1 2
N 1
j
2π N
(mk )n
e
1 2
n0
N 1
第3章
离散傅里叶变换(DFT)及其快速算法 (FFT)
教材第3章习题与上机题解答
1. 计算以下序列的N点DFT, 在变换区间0≤n≤N-1内, 序列定义为 (1) x(n)=1 (2) x(n)=δ(n) (3) x(n)=δ(n-n0) 0<n0<N (4) x(n)=Rm(n) 0<m<N
1 2j
j(
2π N
mn )
[e
e
j(
2π N
mn )
]
2π sin mn N
n=0, 1, …, N-1
第3章
离散傅里叶变换(DFT)及其快速算法 (FFT)
3. 已知长度为N=10的两个有限长序列:
北邮数字信号处理第四章附加题答案正式版

1. 请推导出三阶巴特沃思低通滤波器的系统函数,设1/c rad s Ω=。
解:幅度平方函数是:2261()()1A H j Ω=Ω=+Ω令: 22s Ω=- ,则有:61()()1a a H s H s s-=- 各极点满足121[]261,26k j k s ek π-+==所得出的6个 k s 为:15==j es 2321321jes j +-==π12-==πj e s 2321343jes j --==π2321354j es j -==π2321316j es j +==π15==j e s 2321321je s j +-==π12-==πj e s 2321343je s j --==π2321354j es j -==π2321316j es j +==π122))()(()(233210+++=---=s s s k s s s s s s k s H a 1221)(23+++==s s s s H a 代入s=0时, ,可得,故:1=)s (H a 10=k2. 设计一个满足下列指标的模拟Butterworth 低通滤波器,要求通带的截止频率6,p f kHz =,通带最大衰减3,p A dB =,阻带截止频率12,s f kHz =,阻带的最小衰减25s A dB =,求出滤波器的系统函数。
解: 2,2s s p p f f ππΩ=Ω=0.10.1101lg 101N 2lg()s pA A s p⎛⎫- ⎪-⎝⎭≥ΩΩ=4.15取N=5,查表得H(p)为:221()(0.6181)( 1.6181)(1)H p p p p p p =+++++ 因为3,p A dB =所以c p Ω=Ω[]52222()()0.618 1.618cs p c c c c c c H s H p s s s s s =Ω=Ω=⎡⎤⎡⎤+Ω-Ω+Ω-Ω+Ω⎣⎦⎣⎦3. 设计一个模拟切比雪夫低通滤波器,要求通带的截止频率 f p =3kHz ,通带衰减要不大于0.2dB ,阻带截止频率 f s = 12kHz ,阻带衰减不小于 50dB 。
数字信号处理课后习题答案(全)1-7章
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
(5)y(n)=x2(n)
(6)y(n)=x(n2)
(7)y(n)=
n
(8)y(n)=x(n)sin(ωxn(m) )
m0
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
(5) 画x3(n)时, 先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°), 然后再右移2位, x3(n)波形如题2解图(四)所示。
第 1 章 时域离散信号和时域离散系统
题2解图(一)
第 1 章 时域离散信号和时域离散系统
题2解图(二)
第 1 章 时域离散信号和时域离散系统
题2解图(三)
分别求出输出y(n)。
(1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
解: (1) y(n)=x(n)*h(n)=
数字信号处理课后答案+第4章(高西全丁美玉第三版)
令 y(n)=x1(n)+jx2(n) Y(k)=DFT[y(n)] 则
这样, 通过一次N点IFFT计算就完成了计算2N点DFT。 当然还要进行由Y(k)求X1(k)、 X2(k)和X(k)的运算(运算量相对
k=0, 1, …, N-1
⎧ ⎛n⎞ ⎪ x1 ⎜ 2 ⎟ ⎪ ⎝ ⎠ x (n) = ⎨ ⎪x ⎛ n −1 ⎞ ⎪ 2⎜ 2 ⎟ ⎠ ⎩ ⎝
n = 偶数 n = 奇数
在编程序实现时, 只要将存放x1(n)和x2(n)的两个数组的元 素分别依次放入存放x(n)的数组的偶数和奇数数组元素中 即可。
运算流图。 但画图占篇幅较大, 这里省略本题解答, 请 读者自己完成。
很少)。 (2) 与(1)相同, 设 x1(n)=x(2n) n=0, 1, …, N-1 x2(n)=x(2n+1) n=0, 1, …, N-1 X1(k)=DFT[x1(n)] X2(k)=DFT[x2(n)] 则应满足关系式
1 X 1 ( k ) = DFT[ x1 ( n)] = Yep ( k ) = [Y ( k ) + Y * ( N − k )] 2 1 jX 2 (k ) = DFT[ jx2 (n)] = Yep (k ) = [Y ( k ) − Y * ( N − k )] 2
4. 设x(n)是长度为2N的有限长实序列, X(k)为x(n)的 2N点DFT。 (1) 试设计用一次N点FFT完成计算X(k)的高效算法。 (2) 若已知X(k) ,试设计用一次N点IFFT实现求X(k)的 2N点IDFT运算。
x1(n)和x2(n)均为实序列, 所以根据DFT的共轭对称性, 可用
② 由X1(k)和X2(k)构成N点频域序列Y(k): Y(k)=X1(k)+jX2(k)=Yep(k)+Yop(k)
(完整版)数字信号处理教程程佩青课后题答案

第一章 离散时间信号与系统2.任意序列x(n)与δ(n)线性卷积都等于序列本身x(n),与δ(n-n 0)卷积x(n- n 0),所以(1)结果为h(n) (3)结果h(n-2) (2(4)3 .已知 10,)1()(<<--=-a n u a n h n,通过直接计算卷积和的办法,试确定单位抽样响应为 )(n h 的线性移不变系统的阶跃响应。
4. 判断下列每个序列是否是周期性的,若是周期性的,试确定其周期:)6()( )( )n 313si n()( )()873cos()( )(ππππ-==-=n j e n x c A n x b n A n x a分析:序列为)cos()(0ψω+=n A n x 或)sin()(0ψω+=n A n x 时,不一定是周期序列,nmm m n n y n - - -∞ = - ⋅ = = ≥ ∑ 2 31 2 5 . 0 ) ( 01当 3 4n m nm m n n y n 2 2 5 . 0 ) ( 1⋅ = = - ≤ ∑ -∞ = - 当 aa a n y n a a an y n n h n x n y a n u a n h n u n x m m nnm mn -==->-==-≤=<<--==∑∑--∞=---∞=--1)(11)(1)(*)()(10,)1()()()(:1时当时当解①当=0/2ωπ整数,则周期为0/2ωπ;②;为为互素的整数)则周期、(有理数当 , 2 0Q Q P QP =ωπ ③当=0/2ωπ无理数 ,则)(n x 不是周期序列。
解:(1)0142/3πω=,周期为14 (2)062/13πω=,周期为6 (2)02/12πωπ=,不是周期的 7.(1)[][]12121212()()()()()()[()()]()()()()[()][()]T x n g n x n T ax n bx n g n ax n bx n g n ax n g n bx n aT x n bT x n =+=+=⨯+⨯=+所以是线性的T[x(n-m)]=g(n)x(n-m) y(n-m)=g(n-m)x(n-m) 两者不相等,所以是移变的y(n)=g(n)x(n) y 和x 括号内相等,所以是因果的。
数字信号处理教程课后习题及答案

x(n
− m)sin
2π 9
+
π 7
即 T [x(n − m)] = y(n − m)
∴系统是移不变的
T [ax1(n) + bx2 (n)]
=
[ax1
(n)
+
bx2
(n
)]sin(
2π 9
+
π 7
)
即有 T [ax1(n)+ bx2 (n)]
= ay1(n) + by2 (n)
∴系统是线性系统
(1) T [ x(n)] = g(n)x(n) (2) (3) T [ x(n)] = x(n − n0 ) (4)
(c)
x (n )
=
e
j
(
n 6
−π )
分析:
序列为 x (n ) = A cos( ω 0n + ψ ) 或 x(n) = A sin( ω 0n +ψ ) 时,不一定是周期序列,
①当 2π / ω 0 = 整数,则周期为 2π / ω 0 ;
7
②当 2π = P ,(有理数 P、Q为互素的整数)则周期 为 Q ; ω0 Q
(3) y(n) = δ (n − 2) * 0.5n R3(n) = 0.5n−2 R3(n − 2) (4) x(n) = 2n u(−n −1) h(n) = 0.5n u(n)
当n ≥ 0 当n ≤ −1
∑ y(n) = −1 0.5n−m 2m = 1 ⋅ 2−n
m = −∞
3
y(n) = ∑n 0.5n−m 2m = 4 ⋅ 2n
∴所给系统在 y(0) = 0 条件下是线性系统。
6.试判断:
数字信号处理第4章习题解答教材

DFT [x2 (n)]
DFT {Im[ w(n )]}
1 j Wop (k )
1 2j
[W
((k )) N
W
* (( N
k )) N
]RN
(k)
解:由题意 X k DFT xn,Y k DFT y n 构造序列 Z k X k jY k 对Z k 作一次N点IFFT可得序列z n z(n) IDFT Z k
Re[w(n)] j Im[w(n)]
Wep (k) Wop (k)
由x1(n) Re[w(n)]得
X1(k) DFT[x1(n)] DFT{Re[w(n)]} Wep (k)
1 2
[W
((k
))
N
W *((N
k ))N
]RN
(k)
由x2 (n) Im[w(n)]得
X 2 (k )
(2) 按频率抽取的基-2FFT流图
同样共有L = 4级蝶形运算,每级N / 2 = 8个蝶形运算
基本蝶形是DIT 蝶形的转置
X m1(k )
X m1( j)
WNr
-1
X m (k ) Xm( j)
每个蝶形的两节点距离为2Lm ,即从第一级到 第四级两节点距离分别为8,4,2,1。
系数WNr的确定:r (k )2 2m1 即k的二进制左移m 1位补零
3. N=16 时,画出基 -2 按时间抽取法及按频率抽取法 的 FFT 流图(时间抽取采用输入倒位序,输出自然数 顺序,频率抽取采用输入自然顺序,输出倒位序)。
解: 自然序
倒位序
0 0000 0000 0 1 0001 1000 8 2 0010 0100 4 3 0011 1100 12 4 0100 0010 2 5 0101 1010 10 6 0110 0110 6 7 0111 1110 14
数字信号处理 答案 第四章

z −1
r sin θ
− r sin θ r cos θ
y ( n)
z −1
网络Ⅱ 解 网络Ⅰ:根据信号流程图写出差分方程
y (n) = 2r cos θ y (n − 1) − r 2 y (n − 2) + x(n)
由差分方程得系统函数
H1 ( z ) =
Y ( z) 1 = X ( z ) 1 − 2r cos θ z −1 + r 2 z −1 1 )(rz −1 − e jθ )
(4)并联型
x ( n)
z −1
1/4 10/3
-7/3
y ( n)
z −1
1/2 将系统函数写成部分分式形式
H ( z) =
−7 / 3 10 / 3 + 1 −1 1 1− z 1 − z −1 4 2
4.4 用直接Ⅰ型和直接Ⅱ型结构实现以下系统函数; (1)
H(z)=
−5 + 2 z −1 − 0.5 z −2 1 + 3z −1 + 3z −2 + z −3
3z 3 + 2 z 2 + 2 z + 5 (2) H(x)=0.8 3 z + 4 z 2 + 3z + 2
解 (1)根据系统函数写出差分方程
y (n) + 3 y (n − 1) + 3 y (n − 2) + y (n − 3) = −5 x(n) + 2 x(n − 1) − 0.5 x(n − 2)
可见网络Ⅰ和网络Ⅱ具有相同极点。 4.3 一个因果线性离散系统由下列差分方程描述:
3 1 1 y(n)- y(n-1)+ y(n-2)=x(n)+ x(n-1) 4 8 3
数字信号处理》课后作业参考答案
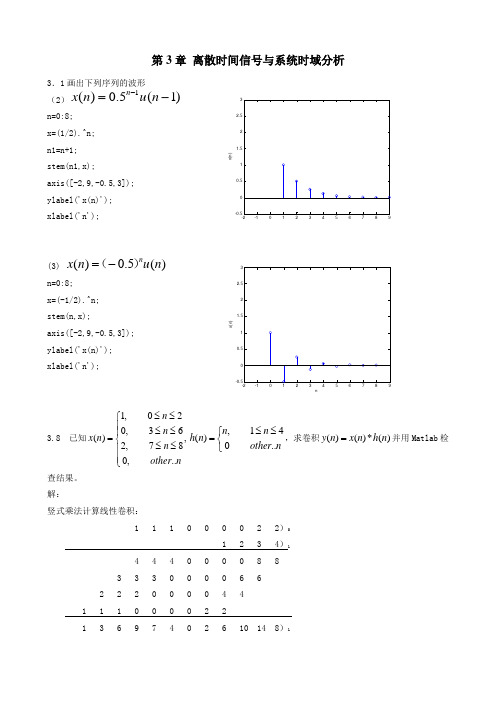
第3章 离散时间信号与系统时域分析3.1画出下列序列的波形(2)1()0.5(1)n x n u n -=- n=0:8; x=(1/2).^n;n1=n+1; stem(n1,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');(3) ()0.5()nx n u n =-()n=0:8; x=(-1/2).^n;stem(n,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');3.8 已知1,020,36(),2,780,..n n x n n other n≤≤⎧⎪≤≤⎪=⎨≤≤⎪⎪⎩,14()0..n n h n other n≤≤⎧=⎨⎩,求卷积()()*()y n x n h n =并用Matlab 检查结果。
解:竖式乘法计算线性卷积: 1 1 1 0 0 0 0 2 2)01 2 3 4)14 4 4 0 0 0 0 8 83 3 3 0 0 0 0 6 62 2 2 0 0 0 0 4 41 1 1 0 0 0 02 21 3 6 9 7 4 02 6 10 14 8)1x (n )nx (n )nMatlab 程序:x1=[1 1 1 0 0 0 0 2 2]; n1=0:8; x2=[1 2 3 4]; n2=1:4; n0=n1(1)+n2(1);N=length(n1)+length(n2)-1; n=n0:n0+N-1; x=conv(x1,x2); stem(n,x);ylabel('x(n)=x1(n)*x2(n)');xlabel('n'); 结果:x = 1 3 6 9 7 4 0 2 6 10 14 83.12 (1) 37πx (n )=5sin(n) 解:2214337w πππ==,所以N=14 (2) 326n ππ-x (n )=sin()-sin(n)解:22211213322212,2122612T N w T N w N ππππππ=========,所以(6) 3228n π-x (n )=5sin()-cos(n) 解:22161116313822222()T N w T w x n ππππππ=======,为无理数,所以不是周期序列所以不是周期序列3.20 已知差分方程2()3(1)(2)2()y n y n y n x n --+-=,()4()nx n u n -=,(1)4y -=,(2)10,y -=用Mtalab 编程求系统的完全响应和零状态响应,并画出图形。
数字信号处理第四章习题
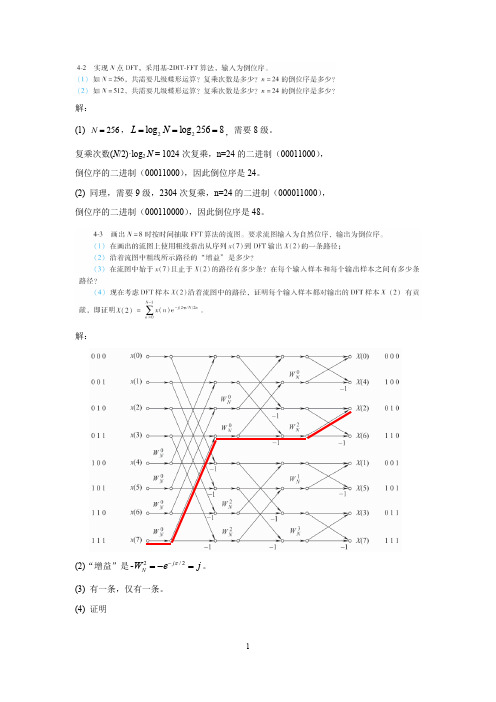
数字信号处理第四章习题第四章习题4.1 (a) By expanding the equation()()[]()==?--∞→∞→2200021T T Ft j T xx T xx dt e t x T E lim F P E lim F 00πΓ taking the expected value, and finally taking the limit as ∞→0T , show that the right-hand side converges to )(f xx Γ.(b) Prove that2102211)(1)(∑∑-=---+-==N n fn j fm j N N m xx en x N e m r ππ.4.2 For zero-mean, jointly Gaussian random variables, X 1, X 2, X 3, X 4, itis well known that)()()()()()()(3241423143214321X X E X X E X X E X X E X X E X X E X X X X E ++=. Use this result to derive the mean-square value of ()m r xx and the variance, given by()[][]()()()[]∑∞-∞=+-+-≈n xx xx xx xx m n m n n m N N m r γγγ*22varwhich is defined as[][][]22(()(var m r E m r E m r xx xx xx -=. 4.3 By use of the expression for the fourth joint moment for Gaussianrandom variables, show that(a)()()[]??--++++=2212122121421)(sin )(sin )(sin )(sin 1f f N N f f f f N N f f f P f P E x xx xx ππππσ (b)[]??--+++=2212122121421)(sin )(sin )(sin )(sin )()(cov f f NN f f f f N N f f f P f P x xx xx ππππσ(c)[]??+=242sin 2sin 1)(var f N fN f P x xx ππσ under the condition that the sequence ()n x is a zero-mean white Gaussian noise sequence with variance 2x σ.4.4 Generalize the results in Problem 4.3 to a zero-mean Gaussian noiseprocess with power density spectrum )(f xx Γ, as given by()[]()+Γ=222sin 2sin 1var f N fN f f P xx xx ππ (Hint: Assume that the colored Gaussian noise process is the output of a linear system excited by white Gaussian noise.)4.5 Show that the periodogram values at frequencies,1,1,0,/-==L k L k f k given by (4.1.35), can be computed by passing the sequence through a bank of L IIR filters, where each filter has an impulse resp onse )()(/2n u e n h N nk j k π-= and then computing the magnitude-squared value of the filter outputs at n=N. Note that each filter has a pole on the unit circle at the frequency f k .4.6 The Bartlett method is used to estimate the power spectrum of asignal x(n). We know that the power spectrum consists of a single peak with a 3 dB bandwidth of 0.01 cycle per sample, but we do not know the location of the peak.(a) Assuming that N is large, determine the value of M=N/K so thatthe spectral window is narrower than the peak.(b) Explain why it is not advantageous to increase M beyond thevalue obtained in part (a).4.7 The N-point DFT of a random sequence x(n) is ∑-=-=10/2)()(N n N nk j e n x k X π.Assume that E[x(n)]=0 and E[x(n)x(n+m)]=)(2m w δσ (in other words,x(n) is a white noise process).(a) Determine the variance of X(k).(b) Determine the autocorrelation of X(k).4.8 An AR(2) process is described by the difference equation)()2(81.0)(n n x n x ω+-=, where w(n) is a white noise process withvarian ce 2ωσ.(a) Determine the parameters of the MA(2), MA(4), and MA(8)models that provide a minimum mean-sequare error fit to thedata x(n).(b) Plot the true spectrum and those of the MA (q), q=2,4,8spectra and compare the results. Comment on how well the MA(q) models approximate the AR (2) process.4.9 An MA (2) process is described by the difference equation )2(81.0)()(-+=n n n x ωω, where w(n) is a white noise process withvariance 2ωσ.(a) Determine the parameters of the AR(2), AR(4), and AR(8)models that provide a minimum mean-square error fit to the data x(n).(b) Plot the true spectrum and those of the AR(p), p=2,4,8, andcompare the results. Comment on how well the AR(p) models appoximate the MA (2) process.4.10 The autocorrelation sequence for an AR process x(n) ismxx m ??? ??=41)(γ (a) Determine the difference equation for x(n)(b) Is your answer unique? If not, give any other possiblesolutions.4.11 Suppose that we represent an ARMA(p,q) process as a cascade ofan MA(q) followed by an AR(p) model. The input-output equation for the MA(q) model is ∑=-=qk k k n w b n v 0)()(, where w(n) is a whitenoise process. The input-output equation for the AR(p) model is∑==-+pk k n v k n x a n x 1)()()((a) By computing the autocorrelation of v(n), show thatq m d b b m mq k m w m k k w vv ≤≤==∑-=+0)(022σσγ(b) Show that 1)()(00=+=∑=a k m a m pk vx k vv γγ4.12 Suppose that the AR(2) process in Problem 4.8 is corrupted by anadditive white noise process v(n) with variance 2v σ. Thus, we havey(n)=x(n)+v(n)(a) Determine the difference equation for y(n) and thusdemonstrate that y(n) is an ARMA(2,2) process. Determine the coefficients of the ARMA process.(b) Generalize the result in part (a) to an AR(p) process∑=+--=pk k n w k n x a n x 1)()()( and )()()(n v n x n y +=.4.13 The harmonic decomposition problem considered by Pisarenko maybe expressed as the solution to the equationa a a Γa H w yy H 2σ=The solution for a may be obtained by minimizing the quadratic form a Γa yy H subject to th e constraint that a a H =1. The constraint can be incorporated into the performance index by means of a Lagrange multiplier. Thus the performance index becomes()a a a Γa H yy H 1-+=λζ.By minimizing ζ with respect to a , show that this formulation is equivalent to the Pisarenko eigenvalue problem given in (4.4.9), with the Lagrange multiplier playing the role of the eigenvalue. Thus,show that the minimum of ζ is the minimum eigenvalue 2w σ.4.14 The autocorrelation of a sequence consisting of a sinusoid withrandom phase in noise is)(2cos )(21m m f P m w xx δσπγ+=where 1f is the frequency of the sinusoidal, P its power, and 2w σthe variance of the noise. Suppose that we attempt to fit an AR(2) model to the data.(a) Determine the optimum coefficients of the AR(2) model as afunction of 2w σ and 1f .(b) Determine the reflection coefficients 1K and 2K correspondingto the AR(2) model parameters.(c) Determine the limiting values of the AR(2) parameters and (1K ,2K )as 02→w σ.4.15 This problem involves the use of cross-correlation to detect a signalin noise and estimate the time delay in the signal. A signal x(n) consists of a pulsed sinusoid corrupted by a stationary zero-mean white noise sequence. That is, 10),()()(0-≤≤+-=N n n w n n y n x ,where )(n w is the noise with variance 2w σ and the signal is -≤≤=otherwise M n n A n y ,010,cos )(0ω. The frequency 0ω is known, but the delay 0n , which is a positiveinteger, is unknown, and is to be determined by cross-correlating x(n) with y(n). Assume that 0n M N +>. Let ∑-=-=10)()()(N n xy n x m n y m rdenote the cross-correlation sequence between x(n) and y(n). In the absence of noise, this function exhibits a peak at delay 0n m =. Thus,0n is determined with no error. The presence of noise can lead toerrors in determining the unknown delay.(a) For 0n m =, determine ()[]0n r E xy . Also, determine thevariance ()[]0var n r xy , due to the presence of the noise. In bothcalculations, assume that the double-frequency term averages to zero. That is, 0/2ωπ>>M .(b) Determine the signal-to-noise ratio, defined as[]{}[])(var )(020n r n r E SNR xy xy = (c) What is the effect of the pulse duration M on the SNR?。
数字信号处理课后习题答案
数字信号处理(姚天任江太辉)第三版课后习题答案第二章2.1 判断下列序列是否是周期序列。
若是,请确定它的最小周期。
(1)x(n)=Acos(685ππ+n ) (2)x(n)=)8(π-ne j(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最小周期等于N=)5(16516取k k =。
(2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最小周期等于N=)3(838取k k =2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
(a)1111(b)(c)111110 0-1-1-1-1-1-1-1-1222222 3333 3444………nnn nnnx(n)x(n)x(n)h(n)h(n)h(n)21u(n)u(n)u(n)a n ===22解 利用线性卷积公式y(n)=∑∞-∞=-k k n h k x )()(按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=∑∞-∞=--k kn k n u k u a)()(=∑∞-∞=-k kn a=aa n --+111u(n)2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λnu(n)*u(n)解:(1) y(n)=∑∞-∞=-k k n u k u )()(=∑∞=-0)()(k k n u k u =(n+1),n ≥0即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-k k k n u k u )()(λ=∑∞=-0)()(k kk n u k u λ=λλ--+111n ,n ≥0即y(n)=λλ--+111n u(n)2.4 图P2.4所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a n u(n),|a|<1,求系统的输出y(n).解 ω(n)=x(n)*h 1(n) =∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n) =∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥32.5 已知一个线性非移变系统的单位取样响应为h(n)=an-u(-n),0<a<1 用直接计算线性卷积的方法,求系统的单位阶跃响应。
数字信号处理 课后答案第4章

快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(F换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
快速傅立叶变换(FFT)
第 4 章
数字信号处理教程 程佩青 课后题答案
第一章 离散时间信号与系统2.任意序列x(n)与δ(n)线性卷积都等于序列本身x(n),与δ(n-n 0)卷积x(n- n 0),所以(1)结果为h(n) (3)结果h(n-2) (2(4)3 .已知 10,)1()(<<--=-a n u a n h n,通过直接计算卷积和的办法,试确定单位抽样响应为 )(n h 的线性移不变系统的阶跃响应。
4. 判断下列每个序列是否是周期性的,若是周期性的,试确定其周期:)6()( )( )n 313si n()( )()873cos()( )(ππππ-==-=n j e n x c A n x b n A n x a分析:序列为)cos()(0ψω+=n A n x 或)sin()(0ψω+=n A n x 时,不一定是周期序列,nmm m n n y n - - -∞ = - ⋅ = = ≥ ∑ 2 31 2 5 . 0 ) ( 01当 3 4n m nm m n n y n 2 2 5 . 0 ) ( 1⋅ = = - ≤ ∑ -∞ = - 当 aa a n y n a a an y n n h n x n y a n u a n h n u n x m m nnm mn -==->-==-≤=<<--==∑∑--∞=---∞=--1)(11)(1)(*)()(10,)1()()()(:1时当时当解①当=0/2ωπ整数,则周期为0/2ωπ;②;为为互素的整数)则周期、(有理数当 , 2 0Q Q P QP =ωπ ③当=0/2ωπ无理数 ,则)(n x 不是周期序列。
解:(1)0142/3πω=,周期为14 (2)062/13πω=,周期为6 (2)02/12πωπ=,不是周期的 7.(1)[][]12121212()()()()()()[()()]()()()()[()][()]T x n g n x n T ax n bx n g n ax n bx n g n ax n g n bx n aT x n bT x n =+=+=⨯+⨯=+所以是线性的T[x(n-m)]=g(n)x(n-m) y(n-m)=g(n-m)x(n-m) 两者不相等,所以是移变的y(n)=g(n)x(n) y 和x 括号内相等,所以是因果的。
数字信号处理习题集(附答案)
第一章数字信号处理概述简答题:1.在A/D变换之前和D/A变换之后都要让信号通过一个低通滤波器,它们分别起什么作用?答:在A/D变化之前为了限制信号的最高频率,使其满足当采样频率一定时,采样频率应大于等于信号最高频率2倍的条件。
此滤波器亦称为“抗混叠”滤波器.在D/A变换之后为了滤除高频延拓谱,以便把抽样保持的阶梯形输出波平滑化,故又称之为“平滑”滤波器.判断说明题:2.模拟信号也可以与数字信号一样在计算机上进行数字信号处理,自己要增加一道采样的工序就可以了。
( )答:错.需要增加采样和量化两道工序。
3.一个模拟信号处理系统总可以转换成功能相同的数字系统,然后基于数字信号处理理论,对信号进行等效的数字处理.( ) 答:受采样频率、有限字长效应的约束,与模拟信号处理系统完全等效的数字系统未必一定能找到。
因此数字信号处理系统的分析方法是先对抽样信号及系统进行分析,再考虑幅度量化及实现过程中有限字长所造成的影响。
故离散时间信号和系统理论是数字信号处理的理论基础.第二章 离散时间信号与系统分析基础一、连续时间信号取样与取样定理计算题:1.过滤限带的模拟数据时,常采用数字滤波器,如图所示,图中T 表示采样周期(假设T 足够小,足以防止混叠效应),把从)()(t y t x 到的整个系统等效为一个模拟滤波器.(a ) 如果kHz rad n h 101,8)(=π截止于,求整个系统的截止频率. (b)对于kHz T 201=,重复(a )的计算.解 (a )因为当0)(8=≥ωπωj e H rad 时,在数 — 模变换中)(1)(1)(Tj X Tj X Te Y a a j ωω=Ω=所以)(n h 得截止频率8πω=c 对应于模拟信号的角频率c Ω为8π=ΩT c因此 Hz Tf c c 6251612==Ω=π 由于最后一级的低通滤波器的截止频率为Tπ,因此对T8π没有影响,故整个系统的截止频率由)(ωj e H 决定,是625Hz 。
数字信号处理-答案第四章

y
l 1
m
( n) ,然后对它求一次 N 点
DFT , 即可计算 X ( z )在单位圆上的 N点抽样 (b)若:N M,可将x ( n)补零 到N点, 即 x ( n) x0 ( n ) 0 则:X (e
j 2 k N
0 n M 1 M n N 1
令 X 1 (k0 , n1 , n0 )
n2 0
x(n , n , n )W
2 1 0 1 ' 1
2
n2 k 0 3
,
k0 0,1,2
X 1' (k0 , n1 , n0 ) X 1 (k0 , n1 , n0 )W6n1k 0 X 2 (k0 , k1 , n0 )
n1 0
2 . 已知X (k ),Y (k )是两个N点实序列x(n), y(n)的DFT值, 今需要从 X (k ),Y (k )求x(n), y (n)值, 为了提高运算效率, 试用一个N点IFFT 运算一次完成。
解 : 依据题意 : x ( n ) X ( k ); y ( n ) Y ( k ) 取序列 Z ( k ) X ( k ) jY ( k ) 对Z ( k )作N点IFFT可得序列 z ( n ). 又根据DFT性质: IDFT [ X(k) jY(k) ] IDFT( [ X( k ) ] jIDFT [Y(k) ] x ( n) jy(n) 由原题可知: x(n),y(n) 都是实序列, 再根据 z(n) x ( n) jy(n) 可得:x(n) Re[ z(n) ] y(n) Im[z(n) ] 综上所述,构造序列 Z(k) X(k) jY(k)可用一次 N点IFFT完成计算x(n),y(n) 值的过程。
数字信号处理第4章部分习题详解
)( 2 k1 k0 ) n1k0 ( 2 n 2 n3 级间旋转因子 W16 。 W16
4
22 n1 2n2 n3 23 n0
0000 1000 0100 1100 0010 1010 0110 1110 0001 1001 0101 1101 0011 1011 0111 1111 x(0) x(8) x(4) -j x(12) x(2) x(10) x(6) -j x(14) x(1) x(9) x(5) -j x(13) x(3) x(11) x(7) x(15) -j -1 -1 -1 -1 -1 -1 -1 -1
nk X (k ) x(n)WN n 0 N 1
1
1
n3 0 n2 0 1
x(n n n n )W
n1 0 1 n0 0 1 0 1 2 3 0 1 2 3
1
1
1
( 23 n0 2 2 n1 2 n2 n3 )( 23 k3 2 2 k 2 2 k1 k0 ) 16
3
n1 0
3
3 n1 ( 4 k1 k 0 ) x(n0 n1 )W4n0 k 0 W16 n 0 0
n1k0 X 1 (n1k0 ) W16 W4n1k1 X 2 (k1k0 ) n1 0
n1 k 0 其中 W16 是级间旋转因子。
n3 0 n 2 0 1 1
n1 0
1 n3 ( 2 2 k 2 2 k1 k 0 ) x(n0n1n2n3 )W2n0 k 0 W4n1k 0 W2n1k1 W8n2 ( 2 k1 k 0 ) W2n2 k 2 W16 W2n3 k3 n 0 0
数字信号处理课后答案第3和4章

用DFT/FFT对信号进行谱分析的误差表现在三个方面, 即混叠现象、 栅栏效应和截断效应。 截断效应包括泄漏和 谱间干扰。
第3章 离散傅里叶变换(DFT)及其快速算法
第3章 离散傅里叶变换(DFT)及其快速算法
(FFT)
xN(n)=IDFT[X(k)]为x(n)的周期延拓序列(以N为延拓周期) 的主值序列。 以后这一结论可以直接引用。
[例3.4.2] 已知 x(n)=R8(n), X(ejω)=FT[x(n)]
对X(ejω)采样得到X(k),
X(k)X(ej)|2πk, k0,1, ,5 6
第3章 离散傅里叶变换(DFT)及其快速算法
(FFT)
当然, 截取信号的长度要足够长。 但如果截取的长度 不够长, 而依靠在所截取的序列尾部加零点, 增加变换区 间长度, 也不会提高分辨率。 例如, 分析周期序列的频谱, 只观察了一个周期的1/4长度, 用这些数据进行DFT, 再通 过尾部增加零点, 加大DFT的变换区间N, 也不能分辨出是 周期序列, 更不能得到周期序列的精确频率。
令m=N-1-n, 则上式可写成
0
N1
X(k) x(m )W N k(n1) x(m )W N km
m N1
m 0
W N k(N 1 )X ( (k)N )R N (k)
第3章 离散傅里叶变换(DFT)及其快速算法
(FFT)
当 k N 时(N为偶数), 2
因为
X N 2 W N N 2(N 1 )X N 2 NW N N 2(N 1 )X N 2
数字信号处理课后习题Ch4

= ( n−2 α )π sin[( n − α ) wc ] sin[( n − α ) w0] 因为 h(n)=hd (n)W R (n)= hd(n) R N (n) 所以(1)当 N 为奇数时 h(n)= { (0 ≤ n ≤ N − 1) ; 0 , 其他 (2)当 N 为偶数时 h(n)的表达式与 N 为奇数时相同 (3)若采用汉明窗设计 h(n)= h d (n)W(n) = ( n−2 α )π sin[( n − α ) wc ] sin[( n − α ) w0] [0.54-0.46cos (
N ⎧ 2 1 ⎪ H (ω ) = b ( n ) c o s [ω ( n − )] ∑ ⎪ 2 n =1 ∴ ⎨ ⎪ N b (n ) = 2 h ( − 1 + n) ⎪ 2 ⎩
∴ (1)当 N 为奇数时
2
sinωc (n − α ) ⎧ RN (n), 0 ≤ n ≤ N − 1 ⎪2cosω0 (n-α ) π (n − α ) h( n) = ⎨ ⎪0, 其他 ⎩
(2)当 N 为偶数时 h(n)的表达式与 N 为奇数时的相同; (3)若用汉明窗设计
h( n) = hd (n)ω (n) = 2 cos ω0 ( n − α ) sin ωc ( n − α ) 2π n [0.54 − 0.46 cos( )]RN (n) π (n − α ) N −1
(1 ).h d ( n ) = =
1 2π
∫
2π 0
H d (e
jω
)e
jn ω
dω
1 π + ω c − j ( ω − π ) α jn ω e e dω 2 π ∫π − ω c π +ωc 1 = e jπ α ∫ e j ( n −α )ω d ω π −ω c 2π 1 1 = e jπ α e j ( n − α ) ω 2π j ( n − α ) 1 e jπ α [e = 2π j ( n − α )
数字信号处理(第三版)教程及答案第4章
第 4 章 时域离散系统的网络结构及数字信号处理的实现
4.3 按照系统函数或者差分方程画系统流图
按照系统函数设计系统的实现方法主要依据的是系统函 数的特点和要求, 画出系统流图, 然后根据流图设计用硬 件或软件进行实现。 系统的网络结构有很多, 但最基本的是FIR和IIR网络结 构。 这两类结构各有特点。 FIR结构一般没有反馈回路, 单 位脉冲响应是有限长的, 系统稳定, 但相对IIR结构, FIR 结构的频率选择性不高, 换句话说, 要求频率选择性高时, 要求FIR有很高的阶数。
N / 2 −1
H ( z) =
∑
n =0
h(n)[ z − n ± z − ( N − n −1) ]
N为偶数
第 4 章 时域离散系统的网络结构及数字信号处理的实现
H ( z) =
( N −1) / 2 −1
∑
n=0
h(n)[ z − n
N −1 − − ( N − n −1) ±z ] + h( )z 2
第 4 章 时域离散系统的网络结构及数字信号处理的实现
N
Ak H ( z) = C + ∑ 1 − p k z −1 k =1
式中, pk是极点l, C是常整数, Ak是展开式中的系数。 一 般pk、 Ak都是复数。 为了用实数乘法, 将共轭成对的极点 放在一起, 形成一个二阶网络, 公式为
bk 0 + bk1 z H k ( z) = 1 + a k1 z −1 + a k 2 z − 2
−1
第 4 章 时域离散系统的网络结构及数字信号处理的实现
上式中的系数均是实数。 总的系统函数为
H ( z) = C + ∑ H k ( z)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( ) = e jω(k−2) 2a1cos(2ω) + 2a2 cos(ω) + a3
Hence for H(e jω) will be real for k = 2.
4.9
H1(e jω ) = α +
an LTI discrete-time system.
4.2 h[n] = δ[n] − αδ[n − R] . Taking the DTFT of both sides we get H(e jω ) =1 − αe− jωR . Let α =| α | ejφ , then the maximum value of H(e jω) is 1 + α, and the minimum value of
H(e jω ) = [2(a1 + a7 ) cos(3ω) + 2(a 2 + a6 ) cos(2ω) + 2(a3 + a5 ) cos(ω) + a4 ]e −j3ω , which is seen
to have linear phase.
4.8 The frequency response of the LTI discrete-time system is given by H(e jω) = a1ejωk + a2e jω(k−1) + a3ejω(k−2) + a2e jω(k−3) + a1ejω(k−4)
minimum value is 1 /(1+ | α |). There are R peaks and dips in the range 0 ≤ ω < 2π . The
locations
of
peaks
and
dips
are
given
by
1 − α e− jωR
=
1±
α,
or
e − jωR
=
±
|
to have the dc value of the magnitude response equal to unity the impulse response should be
multiplied by a factor of K, where K = (1 − α) /(1 − αM).
4.5 The group delay τ(ω) of an LTI discrete-time system with a frequency response H(e jω) =
Chapter 4 (2e)
4.1 If u[n] = zn is the input to the LTI discrete-time system, then its output is given by
∞
∞
∞
∑ ∑ ∑ y[n] = h[k]u[n − k] = h[k]zn−k = zn h[k]z−k = znH(z),
e− jω
and
H2(ejω) =
1 1− βe − jω
.
Thus,
H(e jω) =
H1(e
j
ω
)
H2
(e
jω
)
=
α + e− 1 − βe−
jω jω
.
H(e jω) 2
=
(α + e − jω)(α + e jω) (1− βe − jω)(1 −βe jω)
=
α2 1−
+ 2
2 α cosω βcos ω +
d H(e jω ) dω
–
d
H(e jω) dω
.
Equivalently,
–
dφ(ω) dω
=
j
e jφ(ω) H(e jω ) e jφ(ω)
d H(e jω ) dω
–
d H(e jω) dω
jH(e jω)
=
1 j H(e jω )
d
H(e jω dω
)
+
பைடு நூலகம்
j
d H(e jω) dω
H(e jω )
n=0
=
1 1 − 0.4e− jω
.
Thus,
H(e jω) =
1 1.16 − 0.8 cosω
,
and
{ } arg H(ejω)
=
θ(ω)
=
tan−1
1
0.4 sin ω − 0.4 cos ω
.
H(e ±jπ/ 4 ) = 1.2067 m j0.4759.
Therefore,
k = −∞
k =−∞
k= −∞
∞
∑ where H(z) = h[k]z−k. Hence u[n] = zn is an eigenfunction of the LTI discrete-time
k= −∞
system. If v[n] = znµ[n] is the input to the system, then its output is given by
A(e jω )
=
1 1
+ +
a1e a1e
− −
jω jω
+ a 2e−j2ω + a 2e−j2ω
= 1,
a
trivial
solution.
Solution #2: Consider b0 − b2 = a 2 −1. Choose b0 = a 2, and b2 =1. Substituting
.
The first term on the right hand side is purely imaginary. Hence,
113
τ(ω) =
–
dφ(ω) dω
=
Re
j
d(H(e jω dω
H(e jω)
))
.
4.6 H(e jω ) = [(a1 + a5 ) cos 2ω + (a2 + a 4 ) cosω + a 3] + j[(a1 – a5 )sin 2ω + (a2 – a 4) sin ω]. Hence,
∞
∞
n
∑ ∑ ∑ y[n] = h[k]v[n − k] = zn h[k]µ[n − k]z−k = zn h[k]z−k .
k = −∞
k =−∞
k= −∞
Since in this case the summation depends upon n, v[n] = znµ[n] is not an eigenfunction of
4.11 y[n] = x[n] + α y[n – R]. Y(e jω) = X(e jω ) + αe −jωRY(e jω ). Hence,
H(e jω)
=
Y(ejω) X(ejω)
=
1 1 − α e − jωR
.
Maximum value of H(e jω) is 1 /(1− | α |), and the
the frequency response will have zero phase for a1 = a5 , and a 2 = a 3.
4.7 H(e jω ) = a1 + a 2e− jω + a 3e − j2ω + a 4e− j3ω + a5e− j4ω + a6e − j5ω + a 7e− j6ω = (a1e j3ω + a 7e− j3ω )e− j3ω + (a 2e j2ω + a6e − j2ω )e− j3ω + (a 3e jω + a5e− jω )e− j3ω + a4e − j3ω . If a1 = a 7, a 2 = a 6 , and a 3 = a5 , then we can write
Solution #1: Consider b0 − b2 = 1 − a2 . Choose b0 =1, −b2 =1 − a 2. and b2 = a 2. Substituting
these values in b1 + ( b0 + b2) = ±[a1 + (1 + a 2 )] , we have b1 = a1. In this case,
values in b1 + ( b0 + b2) = ±[a1 + (1 + a 2 )] , we have b1 = a1. In this case,
A(e
jω
)
=
a2 1+
+ a1e − jω a1e − jω +
+ e − j2ω a 2e−j2ω
.
these
4.13 From Eq. (2.17), the input-output relation of a factor-of-2 up-sampler is given by
H(e jω) e jφ(ω), is given by τ(ω) = − d(φ(ω)) . Now, dω
d H(e jω) dω
= e jφ(ω)
d H(e jω ) dω
+
j
H(e
jω )
e jφ(ω)
dφ(ω) dω