利用LMS算法自适应系统仿真
(完整word版)自适应滤波LMS算法及RLS算法及其仿真.
自适应滤波第1章绪论 (1)1.1自适应滤波理论发展过程 (1)1.2自适应滤波发展前景 (2)1.2.1小波变换与自适应滤波 (2)1.2.2模糊神经网络与自适应滤波 (3)第2章线性自适应滤波理论 (4)2.1最小均方自适应滤波器 (4)2.1.1最速下降算法 (4)2.1.2最小均方算法 (6)2.2递归最小二乘自适应滤波器 (7)第3章仿真 (12)3.1基于LMS算法的MATLAB仿真 (12)3.2基于RLS算法的MATLAB仿真 (15)组别:第二小组组员:黄亚明李存龙杨振第1章绪论从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过程称为滤波。
相应的装置称为滤波器。
实际上,一个滤波器可以看成是一个系统,这个系统的目的是为了从含有噪声的数据中提取人们感兴趣的、或者希望得到的有用信号,即期望信号。
滤波器可分为线性滤波器和非线性滤波器两种。
当滤波器的输出为输入的线性函数时,该滤波器称为线性滤波器,当滤波器的输出为输入的非线性函数时,该滤波器就称为非线性滤波器。
自适应滤波器是在不知道输入过程的统计特性时,或是输入过程的统计特性发生变化时,能够自动调整自己的参数,以满足某种最佳准则要求的滤波器。
1.1自适应滤波理论发展过程自适应技术与最优化理论有着密切的系。
自适应算法中的最速下降算法以及最小二乘算法最初都是用来解决有/无约束条件的极值优化问题的。
1942年维纳(Wiener)研究了基于最小均方误差(MMSE)准则的在可加性噪声中信号的最佳滤波问题。
并利用Wiener.Hopf方程给出了对连续信号情况的最佳解。
基于这~准则的最佳滤波器称为维纳滤波器。
20世纪60年代初,卡尔曼(Kalman)突破和发展了经典滤波理论,在时间域上提出了状态空间方法,提出了一套便于在计算机上实现的递推滤波算法,并且适用于非平稳过程的滤波和多变量系统的滤波,克服了维纳(Wiener)滤波理论的局限性,并获得了广泛的应用。
自适应滤波的几种算法的仿真

3、抽头权向量的自适应。
图 2.1 LMS 算法的一般过程 2.1.2 LMS 算法特性
0<µ <
LMS 的均值收敛条件为
2
λmax 。
注意这是在小步长下推导出来的结果(要求
µ < 1 / λmax ) E[vk (n)] → 0 ,当 。此时,
ˆ (n)] → w o n → ∞ ,对所有 k 用 ε 0 (n) 代替 ε(n) ,可得等效地 E[w ,当 n → ∞ 。但是,渐
五、计算复杂度。即考虑一次迭代所需要的计算量、需要的存储器资源; 六、结构。信息流结构及硬件实现方式,是否高度模块化,适合并行计算。
1.4 线性自适应滤波算法
线性自适应滤波算法基于以下两种算法, 而两种算法的思路均为最接近目标平面的极值 点为最终目的。 一 、 随 机 梯 度 算 法 。 例 如 LMS, NLMS, 仿 射 投 影 滤 波 器 , DCT-LMS , GAL (gradient-adaptive lattice algorithm),块 LMS,子带 LMS 等。其思路是通过迭代和梯度估值 逼近维纳滤波,其性能准则是集平均的均方误差。在平稳环境中,通过搜索误差性能表面迭 代地达到性能测量的最优值(最速下降法) ;在非平稳环境中,通过误差性能表面的原点随 时间发生变化,跟踪误差性能表面的底部,输入数据的变化速率须小于算法的学习速率。它 的主要缺点在于收敛速度慢,对输入数据自相关阵的条件数变化敏感。 二、最小二乘算法。例如标准 RLS,平方根 RLS,快速 RLS 等。其思路是基于最小二 乘的算法通过使误差平方的加权和最小求最优权值,其性能准则是时间平均的均方误差。 RLS 算法可以被看作是 Kalman 滤波的一种特殊形式。各算法特点如下: 标准 RLS 算法:基于矩阵求逆引理,缺乏数值鲁棒性、计算量大 O( M );
基于LMS算法自适应噪声抵消系统的仿真研究概要

基于LMS算法自适应噪声抵消系统的仿真研究概要摘要:随着科技的进步和应用的广泛,我们日常生活中经常会遇到各种噪声干扰,对于一些噪声严重的环境,我们需要使用噪声抵消技术来提高信号质量。
本文主要研究了一种基于LMS算法的自适应噪声抵消系统,并通过仿真方法对其进行了评估和验证。
关键词:LMS算法,自适应,噪声抵消,信号质量1.引言噪声是一种对信号质量产生负面影响的因素,噪声抵消技术可以有效地降低噪声干扰,提高信号的质量。
LMS算法是一种常用的自适应滤波算法,它通过不断调整滤波器系数来最小化误差信号和输入信号之间的平方差,从而实现噪声抵消的目的。
本文基于LMS算法,设计了一个自适应噪声抵消系统,并使用MATLAB进行仿真评估。
2.系统模型我们考虑一个包含输入信号、噪声信号和输出信号的噪声抵消系统。
输入信号经过噪声干扰后得到输出信号,我们需要通过自适应滤波器来估计噪声信号,然后将其从输出信号中剔除。
系统模型可以表示如下:y(n)=s(n)+d(n)其中,y(n)为输出信号,s(n)为输入信号,d(n)为噪声信号。
3.LMS算法原理LMS算法可以通过不断更新自适应滤波器的系数来最小化估计误差。
算法的迭代过程如下:-初始化自适应滤波器的系数为0。
-通过滤波器对输入信号进行滤波,得到滤波后的输出信号。
-根据输出信号和期望信号之间的误差来更新滤波器系数。
-重复上述步骤,直到收敛。
4.仿真实验我们使用MATLAB软件来进行仿真实验。
首先,我们生成一个包含噪声干扰的输入信号,并设定期望信号为输入信号本身。
然后,根据LMS算法的迭代过程,不断更新自适应滤波器的系数。
最后,比较输出信号和期望信号之间的误差,评估噪声抵消系统的性能。
5.仿真结果分析通过比较输出信号和期望信号的误差,我们可以评估系统的性能。
通过调整LMS算法的参数,如步长和滤波器长度等,我们可以进一步优化系统的性能。
在本文的仿真实验中,我们发现当步长设置为0.01,滤波器长度为100时,系统的性能最佳。
一种新的LMS自适应滤波算法分析仿真研究

v l e o e p o u t f h u r n n o me ros T ea g rt m lo ito u e h it r a c ft e a s l t au f h r d c e c re ta d f r re r . h l o h as n rd c st e d s b n e o b ou e t ot i u h
基于LMS和RLS算法的自适应滤波器仿真

基于LMS和RLS算法的自适应滤波器仿真自适应滤波器是一种可以自动调整其权重参数来适应不断变化的信号环境的滤波器。
常用的自适应滤波算法包括最小均方(LMS)和最小二乘(RLS)算法。
本文将对基于LMS和RLS算法的自适应滤波器进行仿真,并分析其性能和特点。
首先,介绍LMS算法。
LMS算法是一种基于梯度下降的自适应滤波算法。
其权重更新规则为:w(n+1)=w(n)+μ*e(n)*x(n),其中w(n)为当前时刻的权重,μ为步长(学习速率),e(n)为当前时刻的误差,x(n)为输入信号。
通过不断迭代和更新权重,LMS算法可以使滤波器的输出误差逐渐减小,从而逼近期望的输出。
接下来,进行LMS自适应滤波器的仿真实验。
考虑一个声纳系统的自适应滤波器,输入信号x(n)为声波信号,输出信号y(n)为接收到的声纳信号,期望输出信号d(n)为理想的声纳信号。
根据LMS算法,可以通过以下步骤进行仿真实验:1.初始化权重w(n)为零向量;2.读取输入信号x(n)和期望输出信号d(n);3.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n),其中^T表示矩阵的转置;4.计算当前时刻的误差e(n)=d(n)-y(n);5.更新权重w(n+1)=w(n)+μ*e(n)*x(n);6.重复步骤2-5,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
然后,介绍RLS算法。
RLS算法是一种递推最小二乘的自适应滤波算法。
其基本思想是通过不断迭代更新滤波器的权重,使得滤波器的输出误差的二范数最小化。
RLS算法具有较好的收敛性和稳定性。
接下来,进行RLS自适应滤波器的仿真实验。
基于声纳系统的例子,RLS算法的步骤如下:1.初始化滤波器权重w(n)为一个较小的正数矩阵,初始化误差协方差矩阵P(n)为一个较大的正数矩阵;2.读取输入信号x(n)和期望输出信号d(n);3.计算增益矩阵K(n)=P(n-1)*x(n)/(λ+x^T(n)*P(n-1)*x(n)),其中λ为一个正则化参数;4.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n);5.计算当前时刻的误差e(n)=d(n)-y(n);6.更新滤波器权重w(n+1)=w(n)+K(n)*e(n);7.更新误差协方差矩阵P(n)=(1/λ)*(P(n-1)-K(n)*x^T(n)*P(n-1));8.重复步骤2-7,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
一种新的变步长LMS自适应算法及其仿真
() 1
其中 步长, 敛条 为 收 件为: < ÷ , 0
1
.
引 言
在近十年中, MS L 类算法 已广泛应用于干扰相
已 =d n -I () () () f () “
标准 L MS算法 的公式为 :
f n+1 :I( ) le n X( ) I( ) f n +2l ( ) n
1
消、信道均衡、系统识别以及阵列信号处理之中。
Ab ta t Ba e n ab e i u s n o tn a d LM S a d i sr c s do r fd s s i n s d i c o a r si r v d VSS ag rt m, e LM S a g r h o n t mp o e l o h a n w i l o t m f i v ra l tp sz Sp o o e o a d e s e t d t n lVS l o t m h r o n sc u e y t e s l se i e fco , a i be se ie i r p s d t d r s t a i o a S ag r h s o t mi g a s d b mal tp sz a t r h r i i c h wh c r f i fo ih e r n r m t e s e d o c n e g n e Th n w a g r m ma e u e o te f r e t g f co a h p e f o v re c . e e lo t i h k s s f h o g t n a tr i
(完整word版)自适应滤波LMS算法及RLS算法及其仿真

自适应滤波第1章绪论 (1)1.1自适应滤波理论发展过程 (1)1. 2自适应滤波发展前景 (2)1. 2. 1小波变换与自适应滤波 (2)1. 2. 2模糊神经网络与自适应滤波 (3)第2章线性自适应滤波理论 (4)2. 1最小均方自适应滤波器 (4)2. 1. 1最速下降算法 (4)2.1.2最小均方算法 (6)2. 2递归最小二乘自适应滤波器 (7)第3章仿真 (12)3.1基于LMS算法的MATLAB仿真 (12)3.2基于RLS算法的MATLAB仿真 (15)组别: 第二小组组员: 黄亚明李存龙杨振第1章绪论从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过程称为滤波。
相应的装置称为滤波器。
实际上, 一个滤波器可以看成是一个系统, 这个系统的目的是为了从含有噪声的数据中提取人们感兴趣的、或者希望得到的有用信号, 即期望信号。
滤波器可分为线性滤波器和非线性滤波器两种。
当滤波器的输出为输入的线性函数时, 该滤波器称为线性滤波器, 当滤波器的输出为输入的非线性函数时, 该滤波器就称为非线性滤波器。
自适应滤波器是在不知道输入过程的统计特性时, 或是输入过程的统计特性发生变化时, 能够自动调整自己的参数, 以满足某种最佳准则要求的滤波器。
1. 1自适应滤波理论发展过程自适应技术与最优化理论有着密切的系。
自适应算法中的最速下降算法以及最小二乘算法最初都是用来解决有/无约束条件的极值优化问题的。
1942年维纳(Wiener)研究了基于最小均方误差(MMSE)准则的在可加性噪声中信号的最佳滤波问题。
并利用Wiener. Hopf方程给出了对连续信号情况的最佳解。
基于这~准则的最佳滤波器称为维纳滤波器。
20世纪60年代初, 卡尔曼(Kalman)突破和发展了经典滤波理论, 在时间域上提出了状态空间方法, 提出了一套便于在计算机上实现的递推滤波算法, 并且适用于非平稳过程的滤波和多变量系统的滤波, 克服了维纳(Wiener)滤波理论的局限性, 并获得了广泛的应用。
改进的变步长LMS自适应滤波算法及其仿真
的影响可以忽略不计。当en 较小时, () () p n 也较小 , 由
于 改 进算 法 的 步 长只 与 输入 信号 有 关 , 不 受 噪声 的 而 影响 。 因此 , 有 收敛 速度 快 , 具 稳态 误 差小 的优 点 , 而 且 在 低 信 噪 比的环 境 中仍保 持 较 好 的性 能 , 具有 广 泛
的问题 , 但在 稳态性 能方 面欠佳 。在分析 了 以上 算法 的
中得到 了很 好的应用 …。然而 , 传统 的固定步长的 L MS 算法 在 收敛 速 度 、时变 系 统 的跟踪 能力 和 稳态 失调 之
间 的要 求 是存 在很 大矛 盾 的 。小 的步 长确保 稳态 时具 有 小 的失 调 , 是算 法的 收敛速 度慢 , 但 并且对 非 稳态系 统的跟 踪能力差 大的步 长 . 算法具有 更快的 收敛 速 “使
AnI rv dV r be S e — z MS Ad p ie Fl r g mp o e a i l t p Sie L a t i i a v t n e Alo i m n m ua in g rh a d Si lt t o
FU il , o - i Ru -i ng LIH ng x a
计 平均 。
+N( ) n ) n N( -1
由于 N( ) n 是零均值的噪声 , n 与 X() N() , 无关, z 并且噪声 Ⅳ ) 本身不相关, n N( 一 ) /() N( ) n 1 对 An 的
贡献 很小 , 忽略不计 , 有 可 故
本文步长在h=10 =2 0和卢=02 0 0、 0 . 5时为
《 动 技 应 02 第3卷 期 自 化 术与 用 21年 l 第9
通 信 与 信 息 处 理
基于LMS算法的自适应对消器的MATLAB实现

基于LMS算法的自适应对消器的MATLAB实现LMS(Least Mean Squares)算法是一种常用于自适应信号处理领域的算法,用于实现自适应滤波器或者自适应对消器。
本文将介绍基于LMS 算法的自适应对消器的MATLAB实现。
自适应对消器是一种用于消除信号中的干扰或噪声的滤波器,它的系数会随着输入信号的变化而自适应地调整。
LMS算法是一种广泛使用的自适应算法,它通过最小化预测误差的平方来更新滤波器的权值。
该算法适用于非线性系统、时变系统以及参数不确定的系统。
在MATLAB中,我们可以使用以下步骤来实现基于LMS算法的自适应对消器:1.定义输入信号和期望输出信号:```matlabinput_signal = ... % 输入信号desired_output = ... % 期望输出信号```2.初始化自适应对消器的滤波器系数和步长:```matlabfilter_order = ... % 滤波器阶数filter_coefficients = zeros(filter_order, 1); % 滤波器系数初始化为零step_size = ... % 步长```3.对于每个输入样本,计算预测输出和误差,并更新滤波器的系数:```matlabfor k = 1:length(input_signal)%根据当前输入样本计算预测输出predicted_output = filter_coefficients' * input_signal(k,:);%计算当前误差error = desired_output(k) - predicted_output;%更新滤波器系数filter_coefficients = filter_coefficients + step_size * error * input_signal(k,:);end```4.最后```matlabfiltered_signal = filter_coefficients' * new_input_signal;```需要注意的是,LMS算法的性能和收敛速度与步长的选择有很大关系。
基于LMS算法的自适应滤波器仿真实现

基于LMS算法的自适应滤波器仿真实现作者:刘影南敬昌来源:《现代电子技术》2008年第19期摘要:为了达到最佳的滤波效果,使自适应滤波器在工作环境变化时自动调节其单位脉冲响应特性,提出了一种自适应算法:最小均方算法(LMS算法)。
这种算法实现简单且对信号统计特性变化具有稳健性,所以获得了极为广泛的应用。
针对用硬件实现LMS算法的自适应滤波器存在的诸多缺点,采用Matlab工具对基于LMS算法的自适应滤波器进行了仿真试验。
仿真结果表明,应用LMS算法的自适应滤波器不仅可以实现对信号噪声的自适应滤除,还能用于系统识别。
关键词:自适应滤波器;Matlab;最小均方算法;FIR中图分类号:TN713文献标识码:A文章编号:1004373X(2008)1907403Implementation of Adaptive Filter Simulation Based on LMS AlgorithmLIU Ying,NAN Jingchang(School of Electrics and Information Engineering,Liaoning TechnicalUniversity,Huludao,125105,China)Abstract:In order to achieve the optimum filtering effect,it makes the adaptive filter adjust its units impulse response characteristics automatically on the working environment changed. This paper presents a kind of adaptive algorithm: Least Mean Square (LMS algorithm). As the algorithm is realized simply and has stability with respect to the change of signal statistical characteristics,LMS algorithm is used widely.According to disadvantages of adaptive filter to realize LMS using hardware adaptive filter is simulated which is based on LMS algorithm with Matlab. Results of simulation show that this kind of adaptivefilter not only can filter the signal noise,but also recognize the system.Keywords:adaptive filter;Matlab;LMS algorithm;FIR1 引言1960年Widrow和Hoff提出最小均方误差(LMS)算法。
LMS自适应滤波算法原理与仿真

式 中, 是控制搜索 步长 的参数称 为 自适应 增益常 数 ,或 收敛 参 数 ; () 曲面上各点的梯度 。 n是 最 陡下降法每次迭代都需要知道 性能曲面上某点 的梯度值 ,而实 际上梯 度只能根据观测数据进行估计 。L MS算法是一种很有用 且很 简 单 的估计 梯度 的方法 , 这种算法 自6 0年代 初提出 以后很快得 到广泛应 用 , 的突出优点是计算 量小 、 它 易于实现 , 且不 要求脱线计算日 。只要 自 适应线性组合器 每次迭代运 算时都知道输入信号 和参考响应 , 那么 , 选 用L MS算法就很合适的。 L MS算 法 的 最 核 心 思 想 是 用 平 方 误 差 代 替 均 方 误 差 。这 样 ,
科技信息
高校 理科 研 究
L MS自 适 应 滤 波算 法 原 理 与 仿寅
陕 西理工 学院物理 系 井敏 英 张 超 赵 娜
[ 摘 要] 在对 自适 应滤波器相 关理论研 究的基础上 , 重点研 究 了 L MS自适应滤 波算法 , 并借 用 Ma 山b仿真平 台, 出了在 一定信 给 噪 比条 件 下 , MS算 法 的滤 波 结果 。通 过 分 析 仿 真 可 以 看 出 ,MS算 法计 算 量 小 , 以 达 到 较好 的 滤 波 效 果 , 易 实现 , L L 可 容 有很 高 的 实
5 0年 代 末 [ 所 谓 自适 应 滤 波 就 是 当 输 入 过 程 的 统 计 特 性 未 知 时 或 统 1 】 , 计 特 性 变 化 时 , 波 器 能 够 自动 调 整 自己 的 参 数 , 满 足 某 种 最 佳 准 则 滤 以
y )x()()wr ) n ( =T wn= l x ) n n ( ( n 则 en= ()y )dn一 ( ()dn- () () ( dn一 ( = ()xn 1n= ()wnV n ) n ) w x
论文第三章LMS和RLS自适应滤波器的仿真实现与比较

论文第三章LMS和RLS自适应滤波器的仿真实现与比较自适应滤波器是一种能够根据输入信号的特性自动调整其滤波器性能的滤波器。
LMS(最小均方)和RLS(递归最小二乘)是两种常用的自适应滤波器算法。
本文将对这两种算法进行仿真实现,并对其性能进行比较。
首先,我们实现了LMS自适应滤波器的仿真。
LMS自适应滤波器通过不断调整滤波器系数来最小化预测误差的均方误差。
在仿真中,我们生成了一个包含噪声的信号作为输入信号,并设置了一个期望的滤波器响应。
然后,我们使用LMS算法来自适应调整滤波器的系数,使其逼近期望的响应。
最后,我们比较了实际和期望的滤波器响应,并计算了均方误差。
接下来,我们实现了RLS自适应滤波器的仿真。
RLS自适应滤波器使用递归最小二乘算法来调整滤波器的系数。
在仿真中,我们同样生成了一个包含噪声的输入信号,并设置一个期望的滤波器响应。
然后,我们使用RLS算法来递归地更新滤波器的系数,使其逼近期望的响应。
最后,我们比较了实际和期望的滤波器响应,并计算了均方误差。
在比较LMS和RLS自适应滤波器的性能时,我们主要关注以下几个方面:收敛速度、稳定性和计算复杂度。
收敛速度是指自适应滤波器达到期望的响应所需要的时间。
稳定性是指自适应滤波器在逼近期望的响应时是否会出现不稳定的情况。
计算复杂度是指实现自适应滤波器算法所需要的计算量。
根据我们的仿真结果,我们可以得出以下结论:LMS自适应滤波器的收敛速度较快,但在达到期望的响应后可能会出现振荡的情况,所以在实际应用中需要设置合适的步长参数来平衡收敛速度和稳定性。
RLS自适应滤波器的收敛速度较慢,但在达到期望的响应后相对稳定,不容易出现振荡的情况。
然而,RLS算法的计算复杂度较高,需要大量的计算资源。
总的来说,LMS和RLS自适应滤波器都有各自的优势和劣势。
在实际应用中,我们需要根据具体的需求来选择合适的自适应滤波器算法。
如果追求较快的收敛速度和较低的计算复杂度,可以选择LMS算法;如果追求较稳定的滤波器性能并且有充足的计算资源,可以选择RLS算法。
基于LMS算法与RLS算法自适应滤波及仿真分析
第2 2卷 第 6期
Vo 1 . 2 2 No . 6
电 子 设 计 工 程
El e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 4年 3月
Ma r .2 01 4
基于 L MS算 法与 R L S算 法 自适应滤波及仿真 分析
d e i r v e t h e t w o a l g o it r h ms , g i v i n g c o n v e n i e n c e s o f r e a d e r s t o u n d e r s t a n d . Me a n w h i l e , t h i s a r t i c l e u s e s t h e mo t h e d s o f p i r n c i p l e d e iv r a t i o n a n d s o f t w a r e s i mu l a t i o n , s e t t i n g t h e i n p u t s i g n a l a n d t h e n o i s e s i g n a l ,c o mp a i r n g t h e a d v a n t a g e s a n d d i s a d v a n t a g e s
基于LMS算法的自适应均衡器仿真研究

2 0 1 3年 1 0月
Oe t . 2 01 3
பைடு நூலகம்
基于 L M S 算法 的 自适应均衡器仿真研究
田 竹 梅
( 忻州 师范学 院物 理 电子系 , 山西忻 州 0 3 4 0 0 0 )
[ 摘
要]自适应均衡技术可以减少数字通信过程中由于多径传播 而产生的码 间干扰 , 实 时跟踪移
[ 收稿 日期 ]2 0 1 3— 0 7一I 1
[ 基金项 目] 忻州师 范学院 院级基金项 目( 2 0 1 1 1 6 ) ; 忻 州师范学院《 通信 原理》 重点课 程建设项 目。 [ 作者简介 ] 田竹梅 ( 1 9 8 0一 ) , 女, 山西原平人 , 忻 州师范学院物理 电子 系讲 师, 硕士 , 从 事通信及 电子技 术研 究。
器 均衡 的模 型 图 。
图3 Q A M信 号经线性 均衡 器均衡模型图
. . .
D 口 口亡 I I _ 1 - I l L R I n a t n e d g o e m r H I I R e c ( t ] a A n l g i a u l a r 卜 I ] … ’}
・
3 4・
符 号 引起 的码 问 干扰 , 有较 小 的噪声 增益 ] 。
图 2 非线性均衡器原理
2 自适应 均衡 器 的算 法 自适 应均衡 器 的原 理 就是按 照某 种 准则 和算 法调 整滤 波 器 的抽 头 系数 , 使 滤 波器 的代 价 函数 最 小 化 , 最 终达到最佳均衡的 目的。各种调整均衡器抽头系数的算法就是 自适应算法 , 常用的算法有迫零算法 , 最小均 方( L MS ) 算法 和 递归最 小 二乘 ( R L S ) 算法 j 。 迫零算 法 的实 现需 要一 定条 件 , 应用 场合 比较 局 限 。R L S的 收敛特 性 明显优 于 L MS算 法 , 但 R L S算 法 不 如L M S算 法 稳定 ; 从 算 法 复杂 度来 看 , L MS算 法 的复杂 度 要 比 R L S算 法 小 得多 , 当均 衡器 抽 头 系数 为 N时 ,
自适应均衡器的LMS算法实现及其仿真
第27卷 第5期 吉首大学学报(自然科学版)V ol.27 N o.5 2006年9月Journal of Jishou University(Natural Science Edition)Sept.2006 文章编号:1007-2985(2006)05-0073-03自适应均衡器的LMS算法实现及其仿真Ξ张雅彬,王融丽,刘 昕(吉首大学物理科学与信息工程学院,湖南吉首 416000)摘 要:自适应均衡器已广泛应用于通信、雷达、声纳、控制和生物医学工程等许多领域,为克服多径衰落和信道失真引起的码间干扰,实时跟踪移动通信信道的时变特性,笔者设计了一个基于LMS算法的自适应线性均衡器,并通过改变步长因子Δ来分析其收敛速度和均方误差特性.关键词:自适应均衡器;LMS算法;仿真中图分类号:T N911.5 文献标识码:A在高速数字通信中,多径衰落和信道失真可引起严重的码间干扰,已成为数字通信面临的主要困难之一.克服ISI的一种有效途径是在接收机中采用均衡技术.由于移动衰落信道具有随机性和时变性,这就要求均衡器必须能够实时地跟踪移动通信信道的时变特性,这种自适应均衡器常见的工作模式为训练模式和跟踪模式.对于线性均衡器,其算法有很多种,最常见是基于LMS的算法的自适应均衡器.笔者设计了一个基于LMS算法的自适应均衡器,通过改变步长因子分析其收敛速度及均方误差.[1]1 自适应均衡器LMS算法实现自适应滤波器的研究始于20世纪50年代末,Windrow和H off等在20世纪60年代初提出最小均方误差自适应算法[2] (Least Mean Squares,LMS).LMS算法的基本原理[2-3]是基于误差梯度的最陡下降法,用平方误差代替均方误差,沿着权值的负方向搜索达到均方误差最小意义下的自适应滤波.LMS算法因其结构简单、稳定性好而且易于实现,一直是自适应滤波经典、有效的算法之一.但是这种固定步长的LMS自适应算法在收敛速率、跟踪速率及权失调噪声之间的要求是相互矛盾的,为了克服这一矛盾,人们讨论了各种各样的变步长LMS自适应滤波的改进算法.[4]更新方向向量υ(n)取作第n-1次迭代的E{e2(n)}的负梯度,即最陡下降法,根据这种思想产生的算法称为最小均方算法(LMS).LMS算法的依据是最小均方误差,即理想信号d(n)与滤波器实际输出y(n)之差e(n)的平方值的期望值E{e2(n)}最小,并且根据这个依据来修改权系数w i(n).为了使期望值E{e2(n)}最小,采用最广泛使用的自适应算法形式“下降算法”:Wi (n)=Wi(n-1)+μ(n)υ(n).式中的W i(n)为第n步迭代的权向量,μ(n)为第n次迭代的收敛因子,而υ(n)是第n次迭代的更新方向.最常用的下降算法为梯度下降法,常称最陡下降法.令N阶FIR滤波器的抽头系数为Wi(n),滤波器的输入和输出分别为x(n)和y(n),则FIR横向滤波器方程可表示为y(n)=6N i=-1W i(n)X(n-i),(1)令d(n)代表“所期望的响应”,并定义误差信号e(n)=d(n)-y(n)=d(n)-6N i=-1W i(n)X(n-i),(2)采用向量形式表示权系数及输入W和x(n),可以将误差信号e(n)写作e(n)=d(n)-W T X(n)=d(n)-X(n)W,(3)则误差平方为e2(n)=d2(n)-2d(n)X T(n)W+W T X(n)X T(n)W.(4)Ξ收稿日期:2006-04-16基金项目:湖南省教育厅科学研究项目(04C492)作者简介:张雅彬(1979-),男,山东菏泽人,吉首大学物理科学与信息工程学院教师,主要从事无线通信教学与研究.上式两边取数学期望后,得均方误差E {e 2(n )}=E {d 2(n )}-2E {d (n )X T (n )}W +W T E {X (n )X 2(n )}W .(5)定义互相关函数向量R xd T =E {d (n )X T (n )},(6)自相关函数矩阵R xx =E {X (n )x T (n )},(7)则(5)式可表示为E {e 2(n )}=E {d 2(n )}-2R T xd W +W T R xx W .(8)这表明均方误差是权系数向量W 的二次函数,它是一个凹的抛物型曲面,具有唯一最小值的函数.调节权系数使均方误差为最小.将(8)式对权系数W 求导数,得到均方值误差函数的梯度(n )= E {e 2(n )}=[9E {e 2(n )}/9W 1,…,9E {e 2(n )}/9W n ]T .(9)令 (n )=0,即可求出最佳权系数向量W opt =R -1xx R xd .(10)将W opt 代入(8)式得最小均方差值E {e 2(n )}min =E {d 2(n )}-R T xd W opt .(11)利用(11)式求最佳权系数向量的精确解需要知道R xx 和R xd 的先验统计知识,而且还需要进行矩阵求逆等运算.Widrow 和H off 提出了求解W opt 的近似值的方法,习惯上称之为Widrow 2H off LMS 算法.正如前面所介绍的,这种算法的根据是最优化理论方法中的最速下降法.根据最速下降法.“下一时刻”权系数向量W (n +1)应该等于“现时刻”权系数向量W (n )加上一个负均方误差梯度- (n )的比例项,即W (n +1)=W (n )-μ (n ),(12)其中μ是一个控制收敛速度与稳定性的常数,称之为收敛因子,LMS 算法与梯度 (n )和收敛因子μ有关.精确计算梯度 (n )是十分困难的,一种粗略的但是却十分有效的计算 (n )的近似方法是直接取e 2(n )作为均方误差E {e 2(n )}的估计值,即(n )= [e 2(n )]=2e (n ) [e (n )].(13)其中[e (n )]= [d (n )-W T (n )X (n )]=-X (n ).(14)将(14)式代入(13)式中,得到梯度估值(n )=-2e (n )X (n ),(15)于是Widrow 2H off LMS 算法为W (n +1)=W (n )+2μe (n )X (n ).(16)在LMS 算法中,由于采用最陡下降法的思想来更新权系数向量W (n ),所以LMS 算法中的收敛因子μ决定抽头权向量在每次迭代中的更新量,是影响算法收敛速率和稳态性能的关键参数.收敛因子μ的选择一直是研究的热点,基于LMS 算法的收敛分为均值收敛和均方收敛2种[3],对于收敛因子μ的选择(现在常被称为学习速率参数选择[2])已经有几种著名的选择方法,如时变学习速率的“模拟退火法则”,“换档变速方法(gear 2shifting approach )”等[5].2 计算机仿真图1 传输信息模型 图2 仿真误差分析47吉首大学学报(自然科学版)第27卷 系统仿真模型如图1所示,系统仿真误差分析如图2所示.均衡选取的信道抽头数是2K +1=11,接收信号加噪声的功率P R 归一化到1,信道特性由向量x 确定,其中x =(0.05,-0.063,0.088,-0.126,-0.25,0.0947,0.25,0,0.126,0.038,0.088).Matlab 仿真源代码如下:echo onN =500;K=5;actual isi =[0.05-0.0630.088-0.126-0.250.90470.2500.1260.0380.088];sigma =0.01;delta =0.115;Num ofrealizations =1000;mse av =zeros (1,N -23K );for j =1:Num of realizations , %the in formation sequence for i =1:N , if (rand <0.5), in fo (i )=-1; else in fo (i )=1; end ; echo off ; end ; if (j ==1);echo on ;end %the channel output y =filter (actual isi ,1,in fo ); for i =1:2:N ,[noise (i )noise (i +1)]= gngauss (sigma );end ; y =y +noise ; estimated c =[00000100000]; for k =1:N -23K, y k =y (k :k +23K ); z k =estimated c 3y k.’;e k =in fo (k )-zk ; estimated c =estimated c +delta 3e k 3y k ; mse (k )=e k ^2; echo off ;end ; if (j ==1);echo on ;end mse av =mse av +mse ; echo off ;end ;echo on ;mse av =mse av ΠNum of realizations ;m =[1:490];plot (m ,mse av );3 结语从仿真结果可以发现,减小步长因子Δ,收敛稍许变慢,但可达到最小的均方误差.增加Δ可提高收敛速度,但是当Δ增大时其均方误差也相应增大.所以选择合适的步长因子Δ对于均衡器的性能来说是至关重要的,笔者设计的自适均衡器克服了多径衰落和信道失真可引起的码间干扰,提高通信的传输质量.参考文献:[1] 西 蒙・赫金.自适应滤波器原理(第4版)[M].北京:电子工业出版社,2003.[2] 张贤达.现代信号处理(第2版)[M].北京:清华大学出版社.[3] H AYKI N S.Adaptive Filter Theory [M].America :Prentice Hall ,Inc ,S im on&Schuster C ompany ,1996.[4] 曹达仲,王尤翠.数字移动通信中的自适应均衡技术[J ].通信技术,1997,(2):67-69.[5] WI DROW B ,STE ARNS S D.Adaptive S ignal Processing [M].New Y ork :Prentice -Hall ,1985.Adaptive Equalization Simulation B ased on LMS AlgorithmZH ANG Y a 2bin ,W ANG R ong 2li ,LI U X in(C ollege of Physics Science &In formation Engineering ,Jishou University ,Jishou 416000,Hunan China )Abstract :As an im portant aspect of adaptive signal processing ,adaptive equalization is widely used in the field of tele 2communication ,radar ,s onar ,control and bio medical engineering.In order to overcome the intersymbol interference caused by multipath fadiy and channel distortion ,and according to the time 2dependent charateristics of real 2time track 2ing m obile communication channel ,the author designs on adaptive linear equalization based on LMS alg orithm and ana 2lyzes its convergence rate and mean square error characteristics by varying the step factor.K ey w ords :adaptive equalization ;LMS ;simulation analysis (责任编辑 陈炳权)57第5期 张雅彬,等:自适应均衡器LMS 算法实现及其仿真。
LMS和RLS算法应用及仿真分析

LMS和RLS算法应用及仿真分析LMS(最小均方)算法和RLS(递归最小二乘)算法是两种经典的自适应滤波算法,广泛应用于各种实际场景中。
本文将介绍LMS和RLS算法的原理及其在实际应用场景中的应用,并进行仿真分析。
首先,我们来介绍LMS算法。
LMS算法是一种基于梯度下降法的自适应滤波算法,在信号处理中经常应用于滤波、降噪、系统辨识等领域。
其基本原理是通过不断调整滤波器的权值,使得滤波器的输出与期望输出之间的均方误差最小化。
LMS算法的核心是权值更新公式:w(n+1)=w(n)+μe(n)x(n),其中w(n)表示第n次迭代的权值向量,μ为步长因子,e(n)为滤波器输出与期望输出之差,x(n)为输入信号。
LMS算法具有简单、易实现的特点,但收敛速度较慢,对信号的统计特性较为敏感。
LMS算法在实际应用中有着广泛的应用。
以自适应滤波为例,LMS算法可以用于消除信号中的噪声,提高信号的质量。
在通信系统中,LMS算法可以应用于自适应均衡,解决信道等效时延导致的传输误差问题。
除此之外,LMS算法还可以用于系统辨识、自适应控制等领域。
接下来,我们来介绍RLS算法。
RLS算法是一种基于递归最小二乘法的自适应滤波算法,广泛应用于信号处理、自适应滤波、波束形成等领域。
与LMS算法相比,RLS算法具有更快的收敛速度和更好的稳定性。
其核心思想是通过递归计算逆相关矩阵,从而得到滤波器的最优权值。
RLS算法的权值更新公式可以表示为:w(n+1)=w(n)+K(n)e(n),其中K(n)为滤波器的增益向量,e(n)为滤波器输出与期望输出之差。
不同于LMS算法,RLS算法的步长因子时刻变化,可以根据需要进行调整,从而实现最优的权值更新。
RLS算法在实际应用中也有着广泛的应用。
例如,在通信系统中,RLS算法可以用于波束形成,提高信号的接收效果。
在自适应滤波中,RLS算法可以用于降低信号中的噪声。
此外,在自适应控制领域,RLS算法可以用于模型辨识、参数估计等问题。
自适应滤波LMS算法及RLS算法及其仿真

自适应滤波LMS算法及RLS算法及其仿真1.引言2.自适应滤波LMS算法LMS(Least Mean Square)算法是一种最小均方误差准则的自适应滤波算法。
其基本原理是通过不断调整滤波器的权值,使得输出信号的均方误差最小化。
LMS算法的迭代公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)为滤波器的权值向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。
通过迭代更新权值,LMS算法逐渐收敛,实现了自适应滤波。
3.RLS算法RLS(Recursive Least Square)算法是一种递归最小二乘法的自适应滤波算法。
相比于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法基于最小二乘准则,通过递归式地计算滤波器权值矩阵,不断优化滤波器的性能。
迭代公式可以表示为:P(n)=(P(n-1)-P(n-1)*x(n)*x(n)'*P(n-1)/(λ+x(n)'*P(n-1)*x(n))) K(n)=P(n)*x(n)/(λ+x(n)'*P(n)*x(n))w(n+1)=w(n)+K(n)*e(n)其中,P(n)为滤波器的协方差矩阵,K(n)为最优权值,λ为遗忘因子(用于控制算法的收敛速度),e(n)为误差信号。
4.仿真实验为了验证LMS算法和RLS算法的性能,我们进行了一组仿真实验。
假设输入信号为一个正弦信号,噪声为高斯白噪声。
我们分别使用LMS和RLS算法对输入信号进行自适应滤波,比较其输出信号和原始信号的均方误差。
在仿真中,我们设置了相同的滤波器长度和步长因子,比较LMS和RLS算法的收敛速度和输出质量。
实验结果表明,相对于LMS算法,RLS 算法在相同条件下具有更快的收敛速度和更低的均方误差。
这验证了RLS 算法在自适应滤波中的优越性。
5.结论本文介绍了自适应滤波LMS算法和RLS算法的原理及其在仿真中的应用。
实验结果表明,相对于LMS算法,RLS算法具有更好的收敛性能和适应性。
LMS类自适应算法性能比较与仿真

VS 类算法一般采用如下 的迭代公式 : n41 =y S w( ) W -
(z 42 e n X( , 中 0 y , - , ( ) )其 ) u < <1的常数。文献[ 提出了 ]
逐步逼近未知系统参数。
各 算 法 的优 缺 点 。
关键词 : MS算 法; L 自适应 滤波 ; 关性 ; S算 法 相 VS
中图 分 类 号 : N 2 T 9 文献标识码 : A
0 引言
在 近十年 中 ,M 类算法 已广泛应用 于干扰相消 、 L S 信道
均衡 、 系统识别 以及阵 列信号 处理之 中。Wi o d w等人 提 出 r 的最小均方 ( es a q ̄e L ) 法就是一种 以期望 L at nS u , Ms 算 Me
. ..... ..... .....
w( +1 =w( +2 ) ) (2 , ) ) ( x( e , 其中 (2 = ) , )
....... .
f...一 .. . [.. . . .. ..
口 H 7 X( +x (2 ) )
式 中 a 02 ,≥ 0 ∈( , )卢 。在此基 础上 , 可 以对 新步 长 中的 还
维普资讯
20 年第4 07 期
山西 电子 技术
应 用 实 践
L MS类 自适应 算 法性 能 比较 与仿 真
游青松 胡 浩
( 明理 工 大学信 息工程 与 自动化 学院 , 南 昆明 60 5 ) 昆 云 50 1
摘 要: L 对 MS类 变步长 自适应算法进行讨论和分 类, 通过仿 真实验 , 分别对各 类算法性 能进行分析 并得 出
基于LMS算法的自适应滤波器的仿真分析
( 3 )
( 4 )
估 计误差 为 :
e ( , z ) =d ( , 2 ) 一y ( , z ) :d ( ) 一X ( 胛 ) w ( )
最 佳 滤 波 器 参 量 应 使得 均 方 误 差 e ( n ) 最小 , 因
此 自适应 滤波 的优化 准则 为 :
W( n+1 ) =W ) +2 , u e ( n ) X( N)
果 。 自适应 滤波器 通常 L MS算法 。
式中, 为 步长 因子 ,是控 制 收敛 速度 和 稳 态误
L MS算 法 的基 本 思想 是 通 过 调 整滤 波 器 的权 值 差 的参 量 。我们 由以上 的分 析可 以知 道 , 滤波 器 的长 参数, 使滤 波器 的输 出信 号 与期 望 输 出信号 之 问 的均 度 和 L MS算法 的 步长 因子 影 响 滤波 器 的 收敛速 度和 方误 差最 小 ,这样 系统 输 出为 有用 信 号 的最 佳 估计 。 滤波 性 能 。
现、 滤 波速度 快 , 而且结构 更 为 简单 。
【 关键词 】 : L MS 算法; MA T L A B; 自 适应滤波器
1引 言
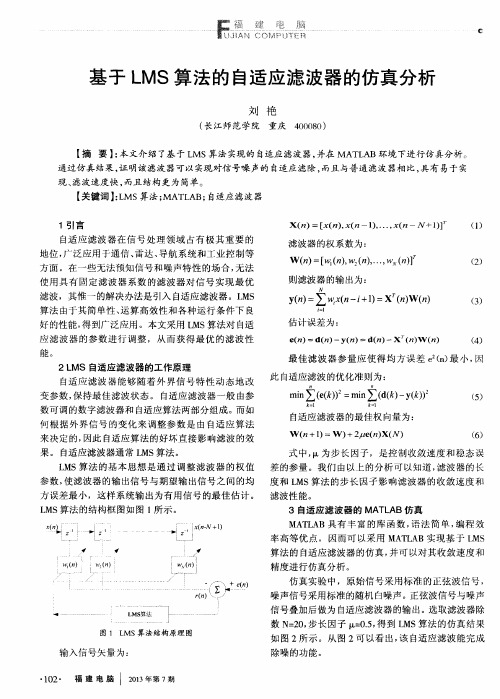
X( 力 )=[ ( ) , x( n一1 ) , … , x ( n—J V+1 ) 1 ( 1 )
自适应 滤 波 器 在 信 号处 理 领 域 占有 极 其 重要 的 地位 , 广 泛应 用 于通信 、 雷达 、 导航 系 统和 工 业控 制等 方面 。在一 些无 法预 知信 号 和噪 声特 性 的场 合 , 无法
图1 L MS算法结构原理 图
如 图 2所 示 。从 图 2可 以看 出 , 该 自适 应滤 波 能完 成
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用LMS算法的自适应系统仿真
[摘要] 一待辩识的iir系统,用一有限长度的fir滤波器来近似辩识系统,介绍了基于最小均方算法(lms算法)的自适应均衡器的原理和结构,采用lms算法得到n阶fir滤波器来逼近原iir滤波器,并且分析了步长,滤波器系数以及自适应过程中的噪声对系统辩识性能的影响,做出了仿真试验结果并分析了仿真试验结果的意义。
[关键词] lms算法 fir滤波器自适应滤波 iir matlab仿真0、引言
假定待辨识系统是极点-零点(iir)系统,要求用一个有限长度的fir 滤波器来辨识该系统,如下图所示。
已知待辨识系统的传输函数为:
(iir),求fir 滤波器的系数。
自适应系统辨识的原理图
系统设计要求为:首先待辨识系统为iir滤波器,利用自适应滤波的方法,采用lms算法得到n阶fir滤波器来逼近原iir滤波器,输入信号为高斯白噪声,考察步长、阶数n对自适应滤波器性能的影响。
1、系统设计原理
由于lms算法不需要离线方式的梯度估值或重复使用数据以及它的简单易行性而被广泛采用。
只要自适应系统是线性组合器,且有输入数据向量和期待响应在每次迭代时可利用,对许多自适应处理
的应用来说,lms算法是最好的选择。
我们采用lms算法自适应调整fir滤波器的系数,自适应滤波器的结构是具有可调系数的直接型fir滤波器。
输入信号为功率为1,长度为1000点的高斯白噪声。
为期望响应,为自适应fir滤波器的输出,误差信号。
对一个fir滤波器,其可调系数为,为滤波器的阶数。
则输出lms算法是由最速下降法导出的,求出使均方误差达到最小值时相应的最佳滤波器系数组。
从任意选择的一组初始值开始,接着在每个新的输入采样值进入自适应滤波器后,计算相应的输出,再形成误差信号,并根据如下方程不断修正滤波器系数:
其中为步长参数,为时刻输入信号在滤波器的第个抽头处的采样值,是滤波器第个系数的负梯度的近似值。
这就是自适应地调整滤波器系数以便使平方误差最小化的lms算法。
2、系统仿真条件设置
我们在matlab7.0 上进行仿真,仿真条件为:利用matlab的库函数randn产生均值为零,方差为1的高斯白噪声。
为了观察不同的步长和阶数对系统性能的影响,必要时可以设定“种子值”产生相同的输入序列,待辨识系统对输入的期待响应。
由待辨识系统的传递函数可以写出它的差分方程形式为:,
其中,,可用filter函数实现,可得到待辨识系统的期待响应。
步长delta范围的确定,fir滤波器有n个lms算法调整的抽头
系数,滤波器长度n作为程序输入变量。
步长参数控制该算法达到最佳解的收敛速度。
大使收敛较快,然而,如果取得太大,算法则会变得不稳定,为了保证稳定,的取值应满足。
在实际工程应用中,因为不可能大于输入相关矩阵对角元素之和,我们采用更为严格的限制条件,对于自适应横向滤波器,即,其中为输入信号功率。
为了检测lms算法的收敛速度,计算均方误差的短时平均并绘制其学习曲线图,即计算:
平均区间可自由设定。
3、仿真结果分析
1)步长对结果的影响
首先固定阶数,用某个状态的randn函数产生同一组输入高斯白噪声,调整步长为不同值,可以观察到以下均方误差与迭代次数的关系的学习曲线:
图1步长=0.01图2步长=0.05
图3步长=0.1图4步长=0.002
从上面的图1至图4中可见,在满足步长的取值范围内,步长越大,收敛越快。
当步长过大,学习曲线会发散,不能收敛,步长过小,收敛速度很慢,在工程中无实际意义。
当步长取0.01左右时,均方误差最小,约为0.01;如果需要较快的收敛速度或者说处理的实时性要求比较强,保证一定误差范围内可以适当增加步长。
2)滤波器阶数对结果的影响
步长固定为0.01,改变自适应滤波器的阶数n,观察到如下学习
曲线:
图5滤波器的阶数为4 图6 滤波器的阶数为12
从图5、图6中可以看出,阶数对于收敛速度影响不大。
随着滤波器阶数的增加,均方误差得到改善。
所以可以通过提高阶数来降低均方误差。
3)加噪对结果的影响
在期望响应中加入高斯白噪声,可以观察以下加噪前和加造后的学习曲线比较图:
图7未加高斯白噪声图8叠加高斯白噪声
从图7、图8中可以看出自适应过程中的噪声引起稳态权向量解发生了较大的变化,收敛于一个距离最佳权向量一定距离的范围内扰动。
所以在设计实现时要尽量减少不必要的噪声,增加系统辨识的精度。
4、结束语
从仿真结果可以看出,在满足步长的取值范围内,步长越大,收敛越快。
当步长过大,学习曲线会发散,不能收敛,步长过小,收敛速度很慢。
在工程中,我们需要折中考虑,存在一个步长值使得均方误差达到最小并且有较快的收敛速度。
阶数对于收敛速度没有影响,随着阶数的增加,均方误差得到改善,所以可以通过提高阶数来降低均方误差。
但是,也不能无限制地提高阶数,一方面是滤波器造价的增加,一方面失调会增加。
对于一个具体的待辨识系统,根据设计指标要求,存在一个合适的步长和阶数,达到最佳状态。
参考文献:
[1] (美)威德罗,(美)斯蒂恩.自适应信号处理.机械工业出版社.2007年
[2] 邹鲲,袁俊泉,龚享铱.matlab 6.x信号处理.清华大学出版社.2002年
[3] 胡昌华,张军波. 基于matlab的系统分析与设计-小波分析[m].西安电子科技大学出版社.1999。