dq坐标变换数学原理解读
dq坐标系数学模型

dq坐标系数学模型引言:dq坐标系是一种常用的坐标系,广泛应用于数学模型中。
本文将介绍dq坐标系的基本概念、转换公式以及在数学模型中的应用。
一、dq坐标系的基本概念dq坐标系是一种以dq轴为基础的坐标系,其中d轴表示直流分量,q轴表示交流分量。
在dq坐标系中,任意向量可以表示为d轴和q 轴的线性组合,即:Vd = V * cos(θ)Vq = V * sin(θ)其中V为向量的幅值,θ为向量的角度。
二、dq坐标系的转换公式在dq坐标系中,向量的转换可以通过dq坐标系的变换公式来实现。
dq坐标系的转换公式如下:Vα = Vd * cos(θ) - Vq * sin(θ)Vβ = Vd * sin(θ) + Vq * cos(θ)其中Vα和Vβ为向量在α轴和β轴上的分量,θ为dq坐标系与αβ坐标系之间的夹角。
三、dq坐标系在数学模型中的应用1. 电力系统中的dq坐标系dq坐标系在电力系统中广泛应用于电压和电流的分析和控制。
通过dq坐标系的转换,可以将电压和电流从三相坐标系转换到dq坐标系,简化了电力系统的分析和控制过程。
2. 电机控制中的dq坐标系dq坐标系也被广泛应用于电机控制领域。
通过dq坐标系的转换,可以将电机的电流从三相坐标系转换到dq坐标系,实现对电机的精确控制。
3. 电力电子领域中的dq坐标系dq坐标系在电力电子领域中也有重要的应用。
通过dq坐标系的转换,可以对电力电子器件的电流进行精确控制,提高电力电子系统的效率和稳定性。
4. 机器人控制中的dq坐标系dq坐标系在机器人控制中也有广泛的应用。
通过dq坐标系的转换,可以将机器人的位姿从笛卡尔坐标系转换到dq坐标系,实现对机器人的精确控制。
结论:dq坐标系是一种常用的坐标系,广泛应用于数学模型中。
本文介绍了dq坐标系的基本概念、转换公式以及在数学模型中的应用。
dq 坐标系的应用领域广泛,包括电力系统、电机控制、电力电子和机器人控制等。
通过dq坐标系的转换,可以简化数学模型的分析和控制过程,提高系统的效率和稳定性。
dq变换的基本原理知乎

dq变换的基本原理
dq变换,也称为派克变换,是一种坐标变换方法,用于将三相交流系统的电压和电流从abc坐标系转换为dq0坐标系。
这种变换的主要目的是简化电力系统的分析和控制。
在dq变换中,d轴与电网的平均电压方向相同,q轴与电网平均电压方向垂直,而0轴则表示直流量。
因此,在这种坐标系下,电压和电流可以被表示为直流量和交流量之和。
dq变换的基本原理可以通过以下步骤来解释:
1.三相到两相的变换:首先,通过Clarke变换,将三相交流系统
的电压和电流从abc坐标系转换为两相正交坐标系(αβ坐标系)。
这一步的目的是将三相系统简化为两相系统,从而方便后续的
处理。
2.旋转变换:接下来,通过Park变换,将αβ坐标系下的电压和
电流从静止坐标系转换为旋转坐标系(dq坐标系)。
这一步的
目的是使得变换后的坐标系与电机的旋转速度同步,从而能够
方便地分析电机的运行状态和控制电机的行为。
通过以上两个步骤,就可以实现dq变换。
在dq坐标系下,电机的运行状态和控制策略可以更加直观地表示和分析。
此外,dq变换还可以将三相电压和电流中的正序基波分量转化为直流分量,从而将交流问题转化为直流问题,进一步简化了电力系统的分析和控制。
总的来说,dq变换是一种非常有用的坐标变换方法,广泛应用于电力系统、电机控制等领域。
三相永磁同步电机坐标变换推导

一、概述如今,在工业界中,三相永磁同步电机因其结构简单、运行稳定、效率高等特点成为了一种常见的电机类型。
而电机的控制则是保证电机能够稳定高效运行的关键。
掌握三相永磁同步电机的控制原理对于工程师来说至关重要。
在三相永磁同步电机的控制中,坐标变换技术是一种常用的数学方法,通过坐标变换可以将三相电机的控制问题转换为直流电机控制问题,从而简化了控制器的设计。
二、三相永磁同步电机的数学模型1. 三相永磁同步电机是一种特殊的同步电机,它的定子绕组被连接到一个三相交流电源上。
它的转子上装有永磁体,因此在没有机械负载情况下依然能够产生恒定的磁场,这使得电机具有较高的效率和响应速度。
2. 为了完成对三相永磁同步电机的控制,我们需要建立其数学模型。
假设电机有a、b、c三个定子绕组,每个绕组的电流分别为ia、ib、ic,电机的磁链为Ψ,电机的控制变量为u,那么电机的数学模型可以表示为:其中,Ld和Lq分别表示d轴和q轴上的电感,ψp是永磁体的磁通,M是电机的磁链,J是电机的转动惯量,B是电机的阻尼系数,Te为电机的电磁转矩。
三、坐标变换推导1. 在三相永磁同步电机的控制中,我们通常使用dq坐标系来描述电机的运动状态。
在dq坐标系中,d轴与永磁体的磁通方向一致,q轴与d轴垂直。
通过dq坐标变换可以将三相电机的控制问题转换为直流电机的控制问题。
2. 我们可以通过以下的数学推导来实现坐标变换:在直角坐标系下,电机的三相电流可以表示为:假设θ为电机的旋转角度,那么dq坐标系转换可以表示为:在dq轴上,电机的电流可以表示为:通过以上推导,我们可以得到电机在dq坐标系下的控制方程,从而可以实现对电机的控制。
四、结论通过以上的推导,我们可以看到坐标变换技三相永磁同步电机坐标变换推导是电机控制中的关键步骤。
坐标变换可以让我们更方便地对电机进行控制,简化了控制器的设计流程,并且使得控制更加高效和稳定。
在坐标变换的基础上,我们可以进一步推导出电机的控制方程,从而实现对电机的精确控制。
dq坐标系滞后于a轴90°情况下的变换

在工程和物理学中,常常会遇到需要对信号进行变换的情况。
其中,dq坐标系变换是一种常见的变换方式,在控制系统、电力电子等领域得到广泛应用。
在dq坐标系中,当dq坐标系相对于a轴存在90°的滞后时,会对信号产生怎样的影响呢?本文将针对dq坐标系滞后于a 轴90°的情况进行深入探讨,分析其变换规律和在实际应用中的意义。
二、dq坐标系简介1.1 dq坐标系的定义dq坐标系是一种基于三相交流系统的正交坐标系,在这个坐标系下,可以对交流电路进行分析和控制。
其中,d轴指向三相电压的峰值,q 轴与d轴正交,构成了一个正交坐标系。
1.2 dq坐标系的应用在电力电子和控制系统中,dq坐标系常用于变流器控制、电机控制等领域。
通过dq坐标系变换,可以将三相交流信号转换为直流信号,从而实现交流电路的分析和控制。
三、dq坐标系滞后于a轴90°的情况2.1 滞后90°的含义当dq坐标系相对于a轴存在90°的滞后时,意味着d轴和q轴的相位差为90°,即dq坐标系在时间上滞后于a轴90°。
这种情况在实际应用中可能会由于各种因素而产生,例如系统响应时间、电路参数变2.2 变换规律在dq坐标系滞后于a轴90°的情况下,对信号进行变换会产生一些特殊的规律。
通常来说,滞后90°的变换会导致原始信号在dq坐标系中发生旋转,具体的变换规律需要通过数学推导和分析来确定。
四、dq坐标系滞后变换的意义3.1 系统响应特性dq坐标系滞后于a轴90°的变换会影响系统的响应特性,可能会增加系统的稳定性、减小系统的波动性等。
在系统设计和控制算法设计中,需要对dq坐标系滞后变换的影响进行充分考虑。
3.2 控制策略优化根据dq坐标系滞后变换的特性,可以优化控制策略,提高系统的控制性能。
在交流电机控制中,通过合理设计滞后90°的变换方案,可以有效减小电机的震动和噪声。
运用数学方法推导dq变换

基于数学推导的方法进行Clark 变换和Park 变换网上很多关于Clark 变换和Park 变换都是基于磁链的,很多没有磁基础的同鞋,看了都很恍惚。
而且很多教科书上关于Clark 变换中的这个系数2/3,都是轻描淡写地一句话,根据能量守恒推导得到的!很多人看到这句之后一脸萌神!现在换个方式来进行Clark 和Park 变换的研究,用纯数学的方式来推导这个两个电力电子最唯美的变换!这两个变换是研究电力电子最基础的理论!在进行推导之前,帮助大家温习一下,三角函数的一些公式,估计很多人已经忘记了,没关系请继续往下看:三角函数积化和差公式:2β)cos(α-β)-cos(αsinβαsin2β)cos(αβ)-cos(αcosβαcos2β)(αs β)sin(αcosβinαin s 2β)(αs β)sin(αβs osαin in c 三角函数和差化积:2βαcos 2βαsin2sinβαsin 2βαsin2βαcos 2sinβαsin 2βαcos2βαcos 2βc osα os c 2βαsin2βαsin 2βc osα os c 其他一些三角函数:inβsinαβcos αcos β)os(αs c inβsinαβcos αcos β)os(αs cinβαc βcos αsin β)in(αs os s inβαc βcos αsin β)in(αs os s 将三相电用公式表示出来:3.........).........120t ωcos(2..........).........120-t ωcos(1..................).........t ωcos(mcm b m a UU U U U U 建立相对于电机定子的静止坐标系, U 为横轴, U 为纵轴,φ为旋转的磁场,α为旋转磁场和横轴的夹角。
如下图:UbUaUcaUαUβψ图1仔细观察三相电表达式和上图,似乎看出点规律来了!设:4.............................)t ωcos( U U U m a 将式(2)用三角函数的和差化积公式进行展开:)5..( (2)32123)t ωsin(21()t ωcos(23)t ωsin()21()t ω(cos()120sin()t ωsin()120cos()t ωcos()120-t ωcos( U U U U U U U U U U U U b m m b m b m b m b同理将式(3)进行展开:)6..( (2)32123)t ωsin()21()t ωcos()23)t ωsin()21()t ω(cos()120sin()t ωsin()120cos()t ωcos()120t ωcos( U U U U U U U U U U U U c m m c m c m c m c将电压表达式写成矩阵的形式:U U U U U cb a2323021211现在需要求出一个矩阵P 使得下式成立:cbaU U U P U U将式(4),式(5),式(6)联立方程组:)9..( (2)321)8..(....................2321)7.......(........................................U U U U U U U U c b a 用式(8)-式(9)得:U U U c b 3 U U U U c b a 30 (10)用式(8)+式(9)得:)11.(.................................................. U U U c b 将公式(7)两边同时乘以2得:)12.(..................................................22 U U a 这里为什么是乘以2而不乘以其他值,在数学领域是没有问题的,但是在工程应用中意义不大了,在后面的Park 变换中,大家就会明白为什么是乘以2,这里就不多说了,继续往下!将式(11)+式(12)得:)13..(........................................32 U U U U c b a 将式(10)和式(13)联立成方程组得:UU U U U U U U c b a c b a 31313233330 (14)好了到现在大家有没有发现,上面这个矩阵P 我们已经求出来了,也许看起来不是太明朗,下面做些变换:c b a c b a U U U U U U U U 33330313132 ................................(15)将式(15)写成矩阵的形式:cb a U U U U U3331333132 很多人又要问了为什么这个结果跟教科书上的不一样呢!好了下面做如下变换:)16....( (2)32123021132cb aU U U U U现在再看看这个结果是不是就和教科书上一样了,是不是感觉到数学工具很强大额,数学是个很好的工具,电子技术是将这些枯燥抽象的公式应用到具体的项目中,其实不管是什么技术都可以用数学的方式进行推导,计算机技术,电子技术,生物技术,仅仅是数学汪洋里的一艘小船!好了!上面即是美妙的Clark 变换,Clark 变换是基于电机定子建立的坐标系,还不能将电机等效成直流特性,下面我们还需要将电机的直流特性表征出来,怎么办呢!不用担心,下面接着进行Park 变换首先我们需要建立坐标系,选取磁场方向为d 轴方向,垂直于d 轴方向建立q 轴,然后将α、β轴投影到d 、q 轴上,θ为d 轴与α轴的夹角,因为q 轴代表无功,所以q 轴滞后d 轴90°,结果如下图:U bU aU caU αU βψU qU d图2有了上面这张图是不是就很简单了,让我们来看图说话吧,建立三角函数关系建立方程组:cos sin sin cos U U U U U U q d OK!将上式写成矩阵的形式:)17......(..............................cos sin sin cosU U U U qd 到现在已经出现点dq 变换的端倪了,离成功还差一步,继续努力!将式(16)带入到式(17)中:)18( (2)321230211sin sin cos 32cb aqd U U U con U U现在将矩阵进行展开:c b a qd U U U U Ucos 23sin 21cos 23sin 21sin sin 23cos 21sin 23cos 21cos 32好了将矩阵内部用函数的形式表示出来:cb a qd U U U U Ucos 120sin sin 120cos cos 120sin sin 120cos sin sin 120sin cos 120cos sin 120sin cos 120cos cos 32将上述三角函数的积化和差公式逆过来使用!cb a qd U U U U U)120sin()120sin(sin )120cos()120cos(cos 32O(∩_∩)O 哈哈!大功告成,dq 变换的神秘面纱已经被揭开了,现在再回过去看看前面的数学处理,是不是应该能明白为什么要那样处理了吧!很多人问磁场是怎样旋转起来的,下面我们几张图来研究下磁场旋转的机制!现在我们假想一下,有一台1对极对数的三相电机,我们从电机的侧面将其切开,三相绕组通上三相交流电,用法拉第右手定律绘制出绕组周围的磁场,结果如下图:上面的图为6个特殊位置下的磁场方向,实际中电流时连续变化的,所以磁场在电机内部也是连续变化的,连起来看上图时发现磁场在电机内部是旋转的!这篇主要是讲述了dq变换的原理及推导,后面一篇将推出dq变换在实际项目中的一些应用。
单相谐波dq变换

单相谐波dq变换一、引言单相谐波dq变换是电力系统中常用的一种数学工具,它可以将三相交流电信号转换为直流信号,并且可以方便地进行控制和分析。
在本文中,我们将介绍单相谐波dq变换的基本原理、公式推导以及应用案例。
二、基本原理单相谐波dq变换是通过对三相交流电信号进行坐标变换来实现的。
具体来说,我们可以将三相交流电信号表示为:$V_{abc}=V_a+jV_b+j^2V_c$其中,$j$是虚数单位,$V_a$、$V_b$和$V_c$分别表示三个相位的电压。
通过dq坐标系变换,我们可以将这个三维向量表示为两个二维向量:$\begin{bmatrix}V_d \\V_q \\\end{bmatrix}=\begin{bmatrix}\cos\theta & -\sin\theta \\\sin\theta & \cos\theta \\\end{bmatrix}\begin{bmatrix}V_a \\V_b \\\end{bmatrix}$其中,$\theta=\omega t+\phi$是旋转角度,$\omega$是角速度,$\phi$是初始相位差。
这个矩阵就是dq坐标系变换矩阵,也称为Park变换矩阵。
通过dq坐标系变换,我们可以将三相交流电信号转换为直流信号。
具体来说,$V_d$表示直流分量,$V_q$表示交流分量。
如果我们只关注交流分量,那么可以将dq变换视为一种滤波器,它可以将不同频率的信号进行分离。
三、公式推导dq坐标系变换矩阵的推导比较复杂,需要用到一些高等数学知识。
这里简单介绍一下基本思路。
首先,我们需要将三相电压表示为复数形式:$V_a=|V_a|\cos(\omega t+\phi_a)$$V_b=|V_b|\cos(\omega t+\phi_b-2\pi/3)$$V_c=|V_c|\cos(\omega t+\phi_c+2\pi/3)$其中,$\phi_a$、$\phi_b$和$\phi_c$分别是三个相位的初始相位差。
dq坐标系的定义
DQ坐标系的定义1. 引言DQ坐标系是一种用于描述物体在三维空间中位置和方向的数学模型。
在计算机图形学、机器人学和虚拟现实等领域中,DQ坐标系被广泛应用于物体建模、运动规划和仿真等任务中。
2. 坐标系概述坐标系是一种用于描述物体位置的系统。
常见的坐标系包括笛卡尔坐标系、极坐标系和球面坐标系等。
DQ坐标系是一种特殊的四元数形式,由位置和方向两个部分组成。
DQ坐标系采用四元数表示位置和方向,其中四元数的实部表示位置,虚部表示方向。
与欧拉角或旋转矩阵相比,DQ坐标系具有很多优点。
它可以避免万向锁问题,并且对于连续变化的物体姿态更具稳定性。
3. DQ坐标系原理3.1 四元数四元数是一种扩展了复数概念的数学工具,由一个实部和三个虚部组成。
一个典型的四元数可以表示为q = a + bi + cj + dk,其中a、b、c和d分别表示实部和虚部的系数。
四元数可以进行加法和乘法运算,类似于复数。
加法运算可以用于表示位置的平移,而乘法运算可以用于表示方向的旋转。
3.2 DQ坐标系定义在DQ坐标系中,一个物体的位置由一个四元数表示,而物体的方向则由另一个四元数表示。
这两个四元数组成了DQ坐标系中的点。
DQ坐标系中的点可以通过以下方式计算:P = Q * D其中P是点的位置,Q是表示位置的四元数,D是表示方向的四元数。
通过这个公式,我们可以将物体在三维空间中的位置和方向完整地描述出来。
4. DQ坐标系应用4.1 物体建模在计算机图形学领域中,DQ坐标系被广泛应用于物体建模。
通过使用DQ坐标系,我们可以更准确地描述物体在三维空间中的位置和姿态。
这对于实现逼真的渲染效果非常重要。
4.2 运动规划在机器人学领域中,DQ坐标系常用于运动规划。
通过使用DQ坐标系,我们可以对机器人进行精确的运动控制。
这对于完成复杂的任务,如抓取和装配,非常有帮助。
4.3 虚拟现实在虚拟现实领域中,DQ坐标系被用于描述虚拟环境中物体的位置和方向。
dq坐标变换数学原理

有意思的是:就图c 的 M、T 两个绕组而 言,当观察者站在地面看上去,它们是与三 相交流绕组等效的旋转直流绕组;如果跳到 旋转着的铁心上看,它们就的的确确是一个 直流电机模型了。这样,通过坐标系的变换, 可以找到与交流三相绕组等效的直流电机模 型。
现在的问题是,如何求出iA、iB 、iC 与 i、i 和 im、it 之间准确的等效关系,这就是 坐标变换的任务。
Lm p
Lm p 0
Rr Lr p
Lr
0 isα
Lm p
isβ
Lr
Rr Lr
p
iirrαβ
式中,下标s和r分别表示定子和转子变量;下标和分
别表示轴和轴变量.
Lm
3 2
Lm s
—— 坐标系定子等效两相绕组的互感;
Ls
3 2
Lms
Lls
Lm
Lls
Lr
3 2
Lms
Llr
Lm
Llr
2.磁链方程
如果观察者站到铁心上与坐标系一起旋
转,他所看到的便是一台直流电机,可以控
制使交流电机的转子总磁通 r 就是等效直流
电机的磁通,则M绕组相当于直流电机的励磁 绕组,im 相当于励磁电流,T 绕组相当于伪 静止的电枢绕组,it 相当于与转矩成正比的电 枢电流。
既然异步电机经过坐标变换可以等效成直 流电机,那么,模仿直流电机的控制策略,得 到直流电机的控制量,经过相应的坐标反变换, 就能够控制异步电机了。
B
N3iB
60o 60o
N2i
N2iβ
N3iC C
N3iA
设磁动势波形是正弦分布的,当三相总磁动势与
二相总磁动势相等时,两套绕组瞬时磁动势在 、 轴上的投影都应相等,
dq坐标系滞后于a轴90°情况下的变换 -回复

dq坐标系滞后于a轴90°情况下的变换-回复dq坐标系滞后于a轴90情况下的变换是一种常用的坐标系变换方式,通过该变换可以将dq坐标系与a轴坐标系进行转换,从而方便地进行电力系统的分析和控制。
首先,我们需要了解什么是dq坐标系和a轴坐标系。
dq坐标系是一种特殊的旋转坐标系,它可以方便地进行电机的dq域控制。
dq坐标系可以转换为三相坐标系(abc坐标系),其中d轴和q轴分别与电机的磁轴保持垂直。
而a轴坐标系是abc坐标系的旋转坐标系,通过旋转角度θ来完成坐标系的转变。
在dq坐标系中,变量可以表示为d轴和q轴的分量,其中d轴分量表示电机的磁通链,q轴分量表示电机的转矩。
假设dq坐标系滞后于a轴90,我们需要进行以下步骤来完成变换:1. 确定a轴坐标系和dq坐标系之间的旋转角度θ。
在本例中,由于dq 坐标系滞后于a轴90,所以θ为90。
2. 根据旋转角度θ,确定旋转矩阵。
旋转矩阵是一个二维矩阵,可以用来描述坐标系的旋转变换。
在本例中,旋转矩阵可以表示为:R = [cos(θ) -sin(θ)][sin(θ) cos(θ)]将θ替换为90,则旋转矩阵R为:R = [0 -1][1 0]3. 对于dq坐标系中的变量向量[Vd, Vq],我们可以通过旋转矩阵R来进行坐标系变换,将变量向量转换到a轴坐标系中,表示为[Vα, Vβ]。
其中Vα表示在a轴上的分量,Vβ表示在a轴与b轴之间的分量。
坐标系变换的计算公式为:[Vα, Vβ] = [Vd, Vq] * R假设有一个dq坐标系中的变量向量[Vd, Vq]为[5, 3],将其进行坐标系变换,可以得到:[Vα, Vβ] = [5, 3] * [0 -1] = [3, 5]通过坐标系变换,我们成功地将dq坐标系中的变量向量[Vd, Vq]转换为了a轴坐标系中的变量向量[Vα, Vβ]。
4. 如果我们希望将变量向量[Vα, Vβ]转换回dq坐标系中的变量向量[Vd, Vq],可以使用逆旋转矩阵R'进行坐标系变换。
dq旋转坐标到三相静止坐标

dq旋转坐标系到三相静止坐标系转换,涉及到电气工程中的坐标变换。
在电机控制和电力系统分析中,经常会使用到这种转换。
以下是大致的步骤和公式:1.确定dq坐标系的旋转方向和角度:dq坐标系是相对于某个参考点旋转的,通常这个参考点是电机的转子位置。
旋转方向通常由右手定则确定,而旋转的角度就是电机的机械角度。
2. 定义三相静止坐标系(abc坐标系):abc坐标系是与电网固定连接的坐标系,通常也称为定子坐标系。
3. 转换公式:根据电机和电网的实际情况,使用适当的变换公式将dq坐标系中的电压或电流转换为abc坐标系。
以下是常用的变换公式:(V_a = V_d \cos(\theta) + V_q \sin(\theta))(V_b = V_d \cos(\theta - 2\pi/3) + V_q \sin(\theta - 2\pi/3))(V_c = V_d \cos(\theta + 2\pi/3) + V_q \sin(\theta + 2\pi/3))其中,(V_a, V_b, V_c) 是abc坐标系中的电压,(V_d) 和(V_q) 是dq坐标系中的电压,(\theta) 是dq坐标系的旋转角度。
4. 反变换也是类似的:(V_d = V_a \cos(\theta) + V_b \cos(\theta - 2\pi/3) + V_c \cos(\theta + 2\pi/3))(V_q = V_a \sin(\theta) + V_b \sin(\theta - 2\pi/3) + V_c \sin(\theta + 2\pi/3))在进行转换时,需要知道dq坐标系的当前位置(即(\theta)),这通常由电机位置传感器提供。
对于同步电机,这个角度就是电机的机械角度;对于异步电机,这个角度还需要通过电机的一些参数和电网频率进行估计。
dq坐标系滞后于a轴90°情况下的变换 -回复
dq坐标系滞后于a轴90°情况下的变换-回复坐标系的选择在数学和物理中都非常重要,因为它们决定了如何描述和分析问题。
在我们讨论dq坐标系滞后于a轴90情况下的变换之前,让我们先了解一下坐标系的概念和一些基本知识。
坐标系是一个由坐标轴组成的系统,用来定位和描述空间中的点。
我们通常使用笛卡尔坐标系,它由三个互相垂直的轴组成:x轴、y轴和z轴。
在此坐标系中,一个点的位置可以由它在每个轴上的坐标值来表示。
然而,有些问题需要使用其他类型的坐标系来更好地描述。
dq坐标系是一种常用的坐标系,广泛应用于电力系统和机械系统的分析中。
它是以当前相电压作为基础,通过变换矩阵来实现从三相αβ坐标系到dq坐标系的转换。
dq坐标系可以使问题表达更简洁,特别是在控制系统和电力系统中。
在dq坐标系中,d轴通常与电网的实际电压向量(a轴)对齐,而q轴与d轴垂直。
这种对齐可以使计算更加简单,因为在dq坐标系中,d轴上的分量与电网中的有功功率有关,q轴上的分量与无功功率有关。
然而,在某些情况下,dq坐标系滞后于a轴90,这可能是因为特定的应用需要dq坐标系偏离标准配置。
在这种情况下,我们需要进行坐标变换,从标准dq坐标系转换为dq坐标系滞后于a轴90的变换。
这种坐标变换可以通过旋转变换矩阵来实现。
旋转变换矩阵是一个3x3矩阵,可以将一个坐标系中的向量转换为另一个坐标系中的向量。
在这种情况下,我们需要一个旋转变换矩阵,将标准dq坐标系中的向量转换为dq 坐标系滞后于a轴90的向量。
假设旋转变换矩阵为R,表示为:R = [cos(θ) -sin(θ) 0][sin(θ) cos(θ) 0][ 0 0 1]其中θ表示dq坐标系滞后于a轴的角度。
在这种情况下,θ为90。
现在,让我们考虑一个在标准dq坐标系中的向量V=[Vd,Vq,0],其中Vd 表示d轴分量,Vq表示q轴分量。
我们要将这个向量转换为dq坐标系滞后于a轴90的向量。
dq坐标变换数学原理
得
i α i β 1 1 2 2 3 3 0 2 1 i A 2 i B 3 i C 2
(3-37)
• 三相—两相坐标系的变换矩阵
令 C3/2 表示从三相坐标系变换到两相坐标系的
变换矩阵,则
2. 三相--两相变换(3/2变换) 现在先考虑上述的第一种坐标变换 ——在三相静止绕组A、B、C和两相静 止绕组、 之间的变换,或称三相静止 坐标系和两相静止坐标系间的变换,简 称 3/2 变换。
• 三相和两相坐标系与绕组磁动势的空间矢量
为方便起见,取 A 轴 B 和 轴重合。设三相绕组 每相有效匝数为N3,两相 N3iB 绕组每相有效匝数为N2, N2i 60o 各相磁动势为有效匝数与 电流的乘积,其空间矢量 60o 均位于有关相的坐标轴上。 N2iβ 由于交流磁动势的大小随 时间在变化着,图中磁动 N3iC 势矢量的长度是随意的。 C
β
Rs Ls Lm ω Lm Lm L m L s Rs
Rr Lr
α
Rr
Lr
图3-9 用两相静止坐标系表示的异步机等 效电路
1. 电压方程
usα Rs Ls p u sβ 0 urα Lm p urβ Lm 0 Rs Ls p Lm Lm p Lm p 0 Rr Lr p Lr isα i Lm p sβ Lr irα Rr Lr p irβ 0
3. 电磁转矩方程
Te np Lm (isβirα isαirβ )
Lm np (Ψ rα isβ Ψ rβ isα ) Lr
以上电压方程、磁链方程和电磁转矩方程再加上式 (3-1)运动方程和式(3-2)转角微分方程构成了静 止坐标系上的异步电动机数学模型。这种在两相静止坐 标系上的数学模型又称作Kron异步电机方程式或双轴 原型电机(Two Axis Primitive Machine)基本方程式。
dq轴变换的过程

dq轴变换的过程一、引言电力系统是由三相交流电压和电流组成的,而dq轴变换则是将三相电压和电流转换为dq坐标系下的分量,使得电力系统的分析更加方便和准确。
dq轴变换是通过矢量旋转的方式实现的,它将三相电压和电流从abc坐标系下转换到dq坐标系下,从而得到dq轴上的电压和电流分量。
二、dq轴变换的原理dq轴变换的原理是基于三相对称系统的特性的。
在三相对称系统中,三相电压和电流的幅值相等,相位差120度,因此可以通过矢量旋转将其转换到dq坐标系下。
1. dq坐标系dq坐标系是以三相电压和电流的零序分量为基准建立的坐标系,其中d轴与三相电压相位相同,q轴与三相电流相位相同。
dq坐标系下,d轴分量表示有功功率,q轴分量表示无功功率。
dq轴变换包括正向dq轴变换和逆向dq轴变换两个过程。
正向dq轴变换:将三相电压和电流转换为dq轴坐标系下的分量。
计算电压和电流的零序分量,即三相电压和电流的平均值。
然后,计算电压和电流的正序分量,即三相电压和电流的相位差120度的分量。
根据dq坐标系的定义,将电压和电流的正序和零序分量分别投影到d轴和q轴上,得到dq轴坐标系下的电压和电流分量。
逆向dq轴变换:将dq轴坐标系下的分量转换为三相电压和电流。
将dq轴坐标系下的电压和电流分量投影到正序和零序分量上。
然后,通过三相正序和零序分量的合成,得到三相电压和电流。
三、dq轴变换的应用dq轴变换在电力系统分析中有着广泛的应用。
1. 稳态分析dq轴变换可以将三相电压和电流转换为dq轴坐标系下的分量,方便进行稳态分析。
通过对dq轴电压和电流的分析,可以得到电力系统的有功功率、无功功率、功率因数等稳态参数。
2. 暂态分析dq轴变换还可以用于电力系统的暂态分析。
在电力系统发生故障或变化时,dq轴变换可以将变化后的电压和电流转换为dq轴坐标系下的分量,方便进行暂态分析。
通过对dq轴电压和电流的分析,可以得到电力系统的瞬时功率、电压和电流波形等暂态参数。
PQ变换与DQ变换的理解与推导讲解
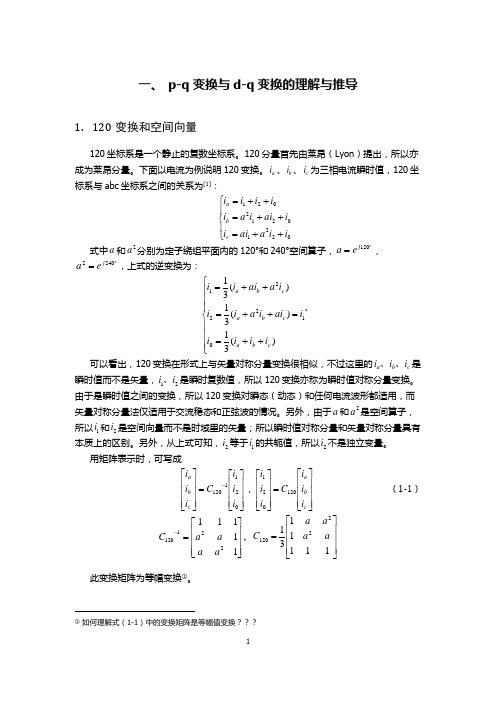
一、 p-q 变换与d-q 变换的理解与推导1. 120变换和空间向量120坐标系是一个静止的复数坐标系。
120分量首先由莱昂(Lyon )提出,所以亦成为莱昂分量。
下面以电流为例说明120变换。
a i 、b i 、c i 为三相电流瞬时值,120坐标系与abc 坐标系之间的关系为[1]:⎪⎩⎪⎨⎧++=++=++=02210212021i i a ai i i ai i a i i i i i c b a 式中a 和2a 分别为定子绕组平面内的120°和240°空间算子,︒=120j ea ,︒=2402j e a ,上式的逆变换为:⎪⎪⎪⎩⎪⎪⎪⎨⎧++==++=++=*)(31)(31)(31012221c b a c b a c b a i i i i i ai i a i i i a ai i i 可以看出,120变换在形式上与矢量对称分量变换很相似,不过这里的c b a i i i 、、是瞬时值而不是矢量,21i i 、是瞬时复数值,所以120变换亦称为瞬时值对称分量变换。
由于是瞬时值之间的变换,所以120变换对瞬态(动态)和任何电流波形都适用,而矢量对称分量法仅适用于交流稳态和正弦波的情况。
另外,由于a 和2a 是空间算子,所以1i 和2i 是空间向量而不是时域里的矢量;所以瞬时值对称分量和矢量对称分量具有本质上的区别。
另外,从上式可知,2i 等于1i 的共轭值,所以2i 不是独立变量。
用矩阵表示时,可写成⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-0211120i i i C i i i c b a ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a i i i C i i i 120021 (1-1)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-11111221120a aaa C ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=111113122120a a a a C 此变换矩阵为等幅变换①。
①如何理解式(1-1)中的变换矩阵是等幅值变换???所谓等幅值变换,是指原三相电流形成的总的磁动势(MMF :Magnetic Motive Force )和变换后的电流形成的磁动势MMF 幅度一样。
dq变换原理

dq变换原理dq变换原理是一种将时域信号转换为复频域信号的方法。
它是数字信号处理领域中的一项重要技术,在信号处理、控制系统等领域都有应用。
下面就让我们一起来详细了解一下dq变换原理。
1. 什么是dq变换?dq变换是一种通过坐标变换将三相交流电压平衡系统的电量(电压、电流、功率)转换为只含有有两个分量的直流量和一个分量的交流量的方法。
其中,d分量表示直流分量,q分量表示交流分量。
2. dq变换的公式dq变化的数学公式为:$[i_d, i_q]^T=T_{dq}*[i_a,i_b]^T$或者$[u_d,u_q]^T=T_{dq}*[u_a,u_b]^T$其中,Tdq是一种三相到二相的转换矩阵,i是电流,u是电压,a、b、c为三相。
3. dq变换的原理dq变换原理是基于向量控制理论的。
在三相交流系统中,由于每个电压、电流矢量都可表示为一个定幅值的矢量和一个随时间变化的矢量,而三相依次相位相差120度,因此我们可以选择一个重要的旋转坐标系,使得一对正交轴(d轴和q轴)对应于两个特定的相位,即dq坐标系。
通过dq变换,任何我们需要的三相变量都可以表示成d和q坐标系的电流和电压成分。
其中,d轴和q轴的方向通常与电流和电压中某个物理量的方向(例如电扭矩)相对应。
在这种情况下,d轴电压表示电动势,q轴电压表示磁场通量。
4. dq变换的应用dq变换在电力电子领域有广泛的应用,如在感应电机中,由于旋转电机活动部件的自身运动,因此通常需要以方便的方式控制旋转电机,dq变换就被应用到调整电机运行状态中。
此外,在感应电机矢量控制、电网上电压波形调制、直流电机转矩控制等领域,也都用到dq变换。
总之,dq变换作为数字信号处理中的一种重要技术,其原理和应用广泛,并能够有效地应用于电力电子和控制系统等领域。
dq坐标变换数学原理解析

有意思的是:就图c 的 M、T 两个绕组而 言,当观察者站在地面看上去,它们是与三
相交流绕组等效的旋转直流绕组;如果跳到
旋转着的铁心上看,它们就的的确确是一个 直流电机模型了。这样,通过坐标系的变换, 可以找到与交流三相绕组等效的直流电机模 型。
现在的问题是,如何求出iA、iB 、iC 与
i、i 和 im、it 之间准确的等效关系,这就是 坐标变换的任务。
id iα cos iβ sin
iq iβ cos iα sin
• 两相旋转—两相静止坐标系的变换矩阵
写成矩阵形式,得
id cos i sin q sin cos
cos sin
iα iα i C2s / 2r i β β
sin cos
(3-40)
式中
C2s / 2 r
是两相静止坐标系变换到两相旋转坐标系的变换 阵。
对式(3-40)两边都左乘以变换阵的逆矩阵, 即得
iα cos i β sin sin cos id id i C2r / 2s i q q
写成矩阵形式,得
1 i α N 3 1 2 i 3 β N 2 0 2 1 i A 2 i 3 B i C 2
考虑变换前后总功率不变,在此前提下,可以证 明,匝数比应为
N3 2 N2 3
(3-41)
则两相旋转坐标系变换到两相静止坐标系的
变换阵是
C2 r / 2s cos sin sin cos
电压和磁链的旋转变换阵也与电流(磁动势)
旋转变换阵相同。
4.直角坐标/极坐标变换(K/P变换) 它是指由d、q轴电流求定子电流和与d轴的夹角1。 显然,其变换式应为
dq坐标变换数学原理
在两相 坐标系中,定子和转子的等效绕组落在互相垂 直的两根轴上,它们之间没有耦合关系,互感磁链只在同 轴绕组之间存在,所以式中的每个磁链分量只剩下两项。
Lm p
1 L m
Rr Lr p
s Lr
1 L m i ds i Lm p qs s L r i dr Rr Lr p i qr
(3-46)
dq坐标系相对于转子的旋转角速度为1-=s,即 转差角速度。式(3-46)的电压方程右边系数矩阵的 每一项都是非零的,这说明异步机在二相同步旋转 坐标系下的数学模型仍是强耦合的。
(1)交流电机绕组的等效物理模型
B iB
B A
F
ω1
iA iC
A
C
C
图a 三相交流绕组
• 旋转磁动势的产生
然而,旋转磁动势并不一定非要三相不 可,除单相以外,二相、三相、四相等任意 对称的多相绕组,通以平衡的多相电流,都
能产生旋转磁动势,当然以两相最为简单。
在这里,不同电机模型彼此等效的原则 是:在不同坐标下所产生的磁动势完全一致。
2. 三相--两相变换(3/2变换) 现在先考虑上述的第一种坐标变换 ——在三相静止绕组A、B、C和两相静 止绕组、 之间的变换,或称三相静止 坐标系和两相静止坐标系间的变换,简 称 3/2 变换。
• 三相和两相坐标系与绕组磁动势的空间矢量
为方便起见,取 A 轴 B 和 轴重合。设三相绕组 每相有效匝数为N3,两相 N3iB 绕组每相有效匝数为N2, N2i 60o 各相磁动势为有效匝数与 电流的乘积,其空间矢量 60o 均位于有关相的坐标轴上。 N2iβ 由于交流磁动势的大小随 时间在变化着,图中磁动 N3iC 势矢量的长度是随意的。 C
永磁同步电机 坐标变换 -回复
永磁同步电机坐标变换-回复【永磁同步电机坐标变换】引言:永磁同步电机是一种普遍应用于工业和交通领域的高效率电动机。
它具有高扭矩密度、宽速度调节范围和较低的能耗等优点。
在永磁同步电机控制中,坐标变换是一个重要的理论基础。
本文将详细讨论永磁同步电机坐标变换的概念、原理和应用。
一、概念1.1 坐标系在物理学和工程中,坐标系用于描述物体在空间中的位置。
常用的坐标系包括直角坐标系、极坐标系和复数坐标系等。
在永磁同步电机控制中,采用一个特殊的坐标系称为dq坐标系,它是一种旋转坐标系。
1.2 dq坐标系dq坐标系是将三相交流电机中的三个电流变量转换为两个变量的坐标系。
其中,d轴与永磁磁场方向相对应,q轴与旋转磁场方向垂直。
dq坐标系使得永磁同步电机的分析和控制更加简单和直观。
二、原理2.1 参考帧与同步转子在永磁同步电机控制中,选择一个合适的参考帧是坐标变换的前提。
通常以转子磁场为旋转参考,称为同步转子。
将dq坐标系与同步转子相对应,可以得到dq0坐标系,其中d轴与同步转子磁场方向一致,q轴与旋转磁场方向垂直。
2.2 dq坐标变换采用dq坐标系描述永磁同步电机的状态和控制变量时,需要进行坐标变换。
dq坐标变换是一个关键步骤,将三相交流电流映射到dq坐标系中。
变换公式如下:id = ia*cos(theta) + ib*sin(theta)iq = ia*sin(theta) - ib*cos(theta)其中,id和iq分别是d轴和q轴上的电流,ia和ib是三相电流,theta 是参考帧相对于dq坐标系的角度。
2.3 逆变换在某些应用中,需要将dq坐标系中的状态和控制变量转换回三相坐标系。
这时,需要进行逆变换。
逆变换的公式如下:ia = id * cos(theta) - iq * sin(theta)ib = id * sin(theta) + iq * cos(theta)其中,ia和ib分别是三相电流,id和iq是d轴和q轴上的电流,theta 是参考帧相对于dq坐标系的角度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)等效的两相交流电机绕组
两相静止绕组 和 ,它 们在空间互差90°,通以时间 上互差90°的两相平衡交流电 流,也产生旋转磁动势 F 。 当两个旋转磁动势大小和 转速都相等时,即认为图b的
i
ω1 i
F
两相绕组与图a的三相绕组等 效。
图B 两相交流绕组
(3)旋转的直流绕组与等效直流电机模型
把这个旋转磁动势的大小和转速也控制成与 图 a 和图 b 中的磁动势一样,那么这套旋转的直 流绕组也就和前面两套固定的交流绕组都等效了。 当观察者也站到铁心上和绕组一起旋转时,在他 看来,d 和 q 是两个通以直流而相互垂直的静止 绕组。 如果控制磁通的位置在 d 轴上,就和直流电 机物理模型没有本质上的区别了。这时,绕组d 相当于励磁绕组,q 相当于伪静止的电枢绕组。
按照所采用的条件,电流变换阵也就是电压 变换阵,同时还可证明,它们也是磁链的变换阵。
3. 两相—两相旋转变换(2s/2r变换)
从两相静止坐 标系到两相旋转坐 标系 d、q 变换称 作两相—两相旋转 变换,简称 2s/2r 变换,其中 s 表示 静止,r 表示旋转。
图中,两相交流电流 i、i 和两个直流电流 id、 iq 产生同样的以同步转速1旋转的合成磁动势 Fs 。由于各绕组匝数都相等,可以消去磁动势
写成矩阵形式,得
1 i α N 3 1 2 i 3 β N 2 0 2 1 i A 2 i 3 B i C 2
考虑变换前后总功率不变,在此前提下,可以证 明,匝数比应为
N3 2 N2 3
• 交流电机的物理模型
如果能将交流电机的物理模型等效地变换成类
似直流电机的模式,分析和控制就可以大大简化。 坐标变换正是按照这条思路进行பைடு நூலகம்。
众所周知,交流电机三相对称的静止绕组 A 、 B 、C ,通以三相平衡的正弦电流时,所产生的合成 磁动势是旋转磁动势F,它在空间呈正弦分布,以同 步转速 1 (即电流的角频率)顺着 A-B-C 的相序 旋转。
得
i α i β 1 1 2 2 3 3 0 2 1 i A 2 i B 3 i C 2
(3-37)
• 三相—两相坐标系的变换矩阵
令 C3/2 表示从三相坐标系变换到两相坐标系的
变换矩阵,则
(1)交流电机绕组的等效物理模型
B iB
B A
F
ω1
iA iC
A
C
C
图a 三相交流绕组
• 旋转磁动势的产生
然而,旋转磁动势并不一定非要三相不 可,除单相以外,二相、三相、四相等任意 对称的多相绕组,通以平衡的多相电流,都
能产生旋转磁动势,当然以两相最为简单。
在这里,不同电机模型彼此等效的原则 是:在不同坐标下所产生的磁动势完全一致。
C3 / 2
1 1 2 2 3 3 0 2
1 2 3 2
(3-38)
如果三相绕组是Y形联结不带零线, 则有 iA + iB + iC = 0,或 iC = iA iB 。 代入式(3-37)得
i α i β 3 2 1 2 0 i A iB 2
2. 三相--两相变换(3/2变换) 现在先考虑上述的第一种坐标变换 ——在三相静止绕组A、B、C和两相静 止绕组、 之间的变换,或称三相静止 坐标系和两相静止坐标系间的变换,简 称 3/2 变换。
• 三相和两相坐标系与绕组磁动势的空间矢量
为方便起见,取 A 轴 B 和 轴重合。设三相绕组 每相有效匝数为N3,两相 N3iB 绕组每相有效匝数为N2, N2i 60o 各相磁动势为有效匝数与 电流的乘积,其空间矢量 60o 均位于有关相的坐标轴上。 N2iβ 由于交流磁动势的大小随 时间在变化着,图中磁动 N3iC 势矢量的长度是随意的。 C
现代交流调速系统
第 3 章
高动态性能变频调速系统
3.2 坐标变换和动态数学模型的简化
上节中虽已推导出异步电机的动态数 学模型,但是,要分析和求解这组非线性 方程显然是十分困难的。在实际应用中必 须设法予以简化,简化的基本方法是坐标 变换。
一、 坐标变换的基本思路
直流电机的数学模型比较简单: • 虽然电枢本身是旋转的,但其绕组通过换向器电 刷接到端接板上,因此,电枢磁动势的轴线始终被电 刷限定在 q 轴位置上,其效果好象一个在 q 轴上静止 的绕组一样。 • 主磁通的方向沿着与之垂直的 d 轴;直流电机 的主磁通基本上唯一地由励磁绕组的励磁电流决定, 这是直流电机的数学模型及其控制系统比较简单的根 本原因。
有意思的是:就图c 的 M、T 两个绕组而 言,当观察者站在地面看上去,它们是与三
相交流绕组等效的旋转直流绕组;如果跳到
旋转着的铁心上看,它们就的的确确是一个 直流电机模型了。这样,通过坐标系的变换, 可以找到与交流三相绕组等效的直流电机模 型。
现在的问题是,如何求出iA、iB 、iC 与
i、i 和 im、it 之间准确的等效关系,这就是 坐标变换的任务。
N3iA
设磁动势波形是正弦分布的,当三相总磁动势与 二相总磁动势相等时,两套绕组瞬时磁动势在 、
轴上的投影都应相等,
1 1 N 2iα N 3iA N 3iB cos 60 N 3iC cos 60 N 3 (iA iB iC ) 2 2
3 N 2iβ N 3iB sin 60 N 3iC sin 60 N 3 (iB iC ) 2
1
it
T M
F d im
q
图c 旋转的直流绕组
再看图c中的两个匝数相等且互相垂直的绕 组 d 和 q,其中分别通以直流电流 id 和iq,产 生合成磁动势 F ,其位置相对于绕组来说是固 定的。 如果让包含两个绕组在内的整个铁心以同步 转速旋转,则磁动势 F 自然也随之旋转起来, 成为旋转磁动势。