MATLAB中的abc dq相坐标变换
关于matlab及pscad中abc2dq模块的使用

关于matlab 及pscad 中abc2dq 模块的使用Abc2dq 是电气控制系统中经常需要使用的模块,一般书本中对其的定义如下:0cos cos(2/3)cos(2/3)2sin sin(2/3)sin(2/3)31/21/21/2d a q b c u u u u u u θθπθπθθπθπ-+⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=----+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(幅值等价)或0cos cos(2/3)cos(2/3)2sin sin(2/3)sin(2/3)31/21/21/2d a q b c u u u u u u θθπθπθθπθπ-+⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=----+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(功率等价)其中:cos a m u U θ=,cos(2/3)b m u U θπ=-,cos(2/3)c m u U θπ=+。
然而在matlab (simulink )及pscad 系统中三相电压采用正弦表示(电流同此),即:sin a m u U θ=,sin(2/3)b m u U θπ=-,sin(2/3)c m u U θπ=+,此外两种仿真平台中的旋转矩阵也与上面不同,以幅值等价旋转矩阵为例,两种软件中的定义分别是:sin sin(2/3)sin(2/3)2cos cos(2/3)cos(2/3)31/21/21/2θθπθπθθπθπ-+⎡⎤⎢⎥-+⎢⎥⎢⎥⎣⎦ (simulink )cos cos(2/3)cos(2/3)2sin sin(2/3)sin(2/3)31/21/21/2θθπθπθθπθπ-+⎡⎤⎢⎥-+⎢⎥⎢⎥⎣⎦(pscad )因此,若直接使用系统提供的旋转矩阵模块,在simulink 中仿真得到的Ud=ud ,Uq=-uq ,在pscad 中得到的Ud=-uq ,Uq=ud 。
一般在pscad 中为方便起见,可将旋转角顺时针旋转90度,及'/2θθπ=-,带入原旋转矩阵,则Id=id ,Iq=iq 。
MATLAB中的abc-dq相坐标变换
坐标变换总结
姓名:
日期:2011.11.4
坐标变换的总结
一. 由三项坐标系变换到两相旋转坐标系
1. 三相到两相静止坐标系的变换
首先,确定三相电压的相序:
cos()
2cos()3
4cos()3A m B m c m u U wt u U wt u U wt ππ==-
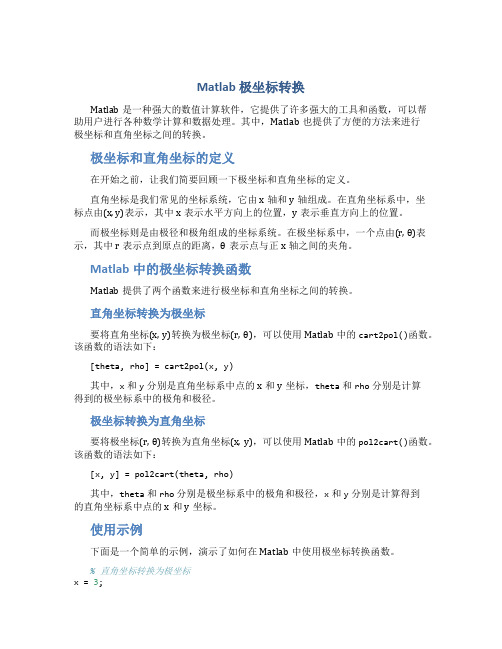
=- 在坐标图上表示三相到两相静止坐标系上的变换,如图所示:
图1 3-2s 变换
由上图,我们可以将A u 、B u 、c u 转化到两相静止坐标系上,具体等式如下:
211()3222)3A B C B C u u u u u αβ⎧=--⎪⎪⎨⎪=⎪⎩
插入系数2、3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。
后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:
11122230A B C u u u u u αβ⎡⎤⎡⎤--
⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥⎣⎦⎢⎣ 2. 两相静止坐标系到两相旋转坐标系的变换
我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。
坐标变换如图所示:。
基于matlab的永磁同步电机调速系统的仿真
摘要本文首先介绍了永磁同步电机的国内外发展状况,然后介绍了永磁同步电机的结构及原理,接着建立了永磁同步电机的数学模型,并在此基础上用MATLAB 进行了仿真,最后进行了仿真及仿真结果的分析。
永磁同步电机是具有非线性、强耦合性、时变性的系统,在运行过程中会受到负载扰动等多因素影响。
以往研究永磁同步电机的做法是在硬件上搭建一个平台进行模拟,但是这样在做实验中难免会造成一些损失,而且硬件上的反馈会比较长研究周期长。
目前在国内外关于永磁同步电机调速系统的研究现状上来讲,基于MATLAB环境下仿真模型的构建下进行研究,这可极大的缩短研究周期和研究成本。
在利用MATLAB仿真模型研究永磁同步电机时,我们可以把那些扰动因数做成模拟信号给予模型,这样可以准确的定性分析实验得出结论。
关键字:永磁同步电机,空间矢量调制,MATLAB仿真,数学模型。
ABSTRACTIn the first, this paper introduces the domestic and international development status of Permanent Magnet Synchronous Motor(PMSM), gives a explanation about its basictheory, structure. Then it builds a mathematical model, and uses MATLAB to simulate that model.The PMSM is a nonlinear, strong-coupling and time-varying system, so in the operation process, it will be influenced by many factors such asload disturbance. Therere, it is necessary to take action when researching the control method of PMSM. The former research method is setting up a platform on hardware to perform experimensbut it is undesirable, because it often cause some loss, and the feedback cycle is longer than research cycle. As fordomestic and international current situation on the research of PMSM, it is obvious that researching under the simulation model created by MATLAB could greatly reduce the cost and cycle of researchment. When using MATLAB to build simulation model on the research of PMSM, we can transform these disturbance factors into analog signal, making a qualitative analysis to draw conclusions from them.Keywords:PMSM, SVPWM, MATLAB simulation, mathmatical model目录摘要 (I)ABSTRACT .............................................. I I 目录............................................... I II 第一章绪论 (1)1.1 研究背景及意义 (1)1.1.1 研究背景 (1)1.1.2 研究的目的及意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究历史及现状 (2)1.2.2 国外研究现状及趋势 (2)1.3 本文的主要内容 (3)第二章永磁同步电机调速系统的结构和数学模型 (5)2.1 引言 (5)2.2 永磁同步电机调速系统的结构 (5)2.3 永磁同步电机调速系统的数学模型 (6)2.3.1 PMSM在ABC坐标系下的磁链和电压方程 (6)坐标系下的磁链和电压方程 (8)2.3.2 PMSM在02.3.3 PMSM在dq0坐标系下的磁链和电压方程 (9)2.4 永磁同步电机的控制策略 (11)2.5 本章小节 (12)第三章永磁同步电机矢量控制及空间矢量脉宽调制 (14)3.1 引言 (14)3.2 永磁同步电动机的矢量控制 (14)3.3 空间矢量脉宽调制概念 (15)3.4 SVPWM模块的建立 (17)3.5 本章小结 (23)第四章基于Matlab的永磁同步调速系统仿真模型的建立 (24)4.1 引言 (24)4.2 MATLAB软件的介绍 (24)4.3永磁同步电机调速系统整体模型的建立 (25)4.4仿真参数调试及结果分析 (28)4.5本章小结 (29)第五章总结与展望 (30)5.1全文总结 (30)参考文献 (31)致谢 (33)第一章绪论1.1 研究背景及意义1.1.1 研究背景随着电力电子技术、微电子技术和现代电机控制理论的发展,交流调速系统逐步具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,交流调速系统应用越来越广泛。
永磁同步电机矢量控制matlab仿真

永磁同步电机矢量控制matlab仿真永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的矢量控制(也称为场向量控制或FOC)是一种先进的控制策略,用于优化电机的性能。
这种控制方法通过独立控制电机的磁通和转矩分量,实现了对电机的高性能控制。
在MATLAB中,你可以使用Simulink和SimPowerSystems库来模拟永磁同步电机的矢量控制。
以下是一个基本的步骤指南:1.建立电机模型:使用SimPowerSystems库中的Permanent Magnet SynchronousMachine模型。
你需要为电机提供适当的参数,如额定功率、额定电压、额定电流、极对数、转子惯量等。
2.建立控制器模型:矢量控制的核心是Park变换和反Park变换,用于将电机的定子电流从abc坐标系变换到dq旋转坐标系,以及从dq坐标系变换回abc坐标系。
你需要建立这些变换的模型,并设计一个适当的控制器(如PI控制器)来控制dq轴电流。
3.建立逆变器模型:使用SimPowerSystems库中的PWM Inverter模型。
这个模型将控制器的输出(dq轴电压参考值)转换为逆变器的开关信号。
4.连接模型:将电机、控制器和逆变器连接起来,形成一个闭环控制系统。
你还需要添加一个适当的负载模型来模拟电机的实际工作环境。
5.设置仿真参数并运行仿真:在Simulink的仿真设置中,你需要设置仿真时间、步长等参数。
然后,你可以运行仿真并观察结果。
6.分析结果:你可以使用Scope或其他分析工具来查看电机的转速、定子电流、电磁转矩等性能指标。
这些指标可以帮助你评估控制算法的有效性。
请注意,这只是一个基本的指南,具体的实现细节可能会因你的应用需求和电机参数而有所不同。
在进行仿真之前,建议你仔细阅读相关的文献和教程,以便更好地理解永磁同步电机的矢量控制原理。
matlab坐标转换四参数法

matlab坐标转换四参数法1.引言1.1 概述在地理信息系统和测绘学中,坐标转换是一项重要的任务。
由于不同的坐标系统具有不同的基准和投影方式,因此需要进行坐标转换才能将一个点的坐标从一个坐标系统转换到另一个坐标系统。
本文将介绍一种常用的坐标转换方法——四参数法。
四参数法是一种简单而有效的坐标转换方法,通过使用四个参数进行坐标的平移和旋转,实现坐标的转换。
本文的目的是为读者介绍四参数法的原理、应用和优势。
通过深入理解四参数法的原理,读者将能够准确地将坐标在不同的坐标系统之间进行转换。
本文的结构如下:首先,将介绍坐标转换的背景,包括不同坐标系统的特点和应用领域。
其次,将详细介绍四参数法的原理,包括参数的意义和计算方法。
最后,将探讨四参数法在坐标转换中的应用,并对整个文章的内容进行总结。
通过阅读本文,读者将能够全面了解四参数法在坐标转换中的作用,掌握使用四参数法进行坐标转换的基本技巧和要点。
希望本文能够对地理信息系统和测绘学领域的专业人士和学生提供有益的参考和借鉴。
1.2文章结构文章结构部分的内容如下:1.2 文章结构本文分为引言、正文和结论三部分。
每个部分都包含了多个章节,以便清晰地呈现出Matlab坐标转换四参数法的相关内容。
在正文部分,我们将首先介绍坐标转换的背景,包括为什么需要进行坐标转换以及坐标转换的重要性。
然后,我们将详细解释四参数法的原理,包括如何使用四个参数来进行坐标转换,并且说明其适用性和局限性。
在结论部分,我们将探讨四参数法在坐标转换中的实际应用,包括它在地理信息系统和测量等领域中的重要性和实用性。
最后,我们将对整篇文章进行总结,并提出一些展望和未来的研究方向。
通过这种结构,读者将能够系统地了解Matlab坐标转换四参数法的相关知识和应用,同时也可以深入研究并拓展该方法的更多可能性。
1.3 目的本文的目的是介绍和讨论在Matlab中使用四参数法进行坐标转换的方法。
坐标转换是在地理信息系统(GIS)和测量工程中常用的技术,用于在不同的坐标系统或参考框架之间转换地理位置信息。
坐标变换在matlab中的实现

1,abc to ab(park)
2,ab to abc(clark)
4,dq to abc
6,dq to ab
注意,涉及到abc到dq的坐标变换时,要加时钟函数具体见前面。
参数如下
7,abc坐标系和αβγ坐标系之间的变换矩阵
考虑矩阵符号前面的因子后,以上变换矩阵的行向量分别是α、β、γ坐标轴上的单位向量在abc坐标系中的坐标。
变换矩阵的逆矩阵,实际上就是线性代数课程中所定义的由旧基(a、b、c轴的单位向量)向新基(α、β、γ轴的单位向量)的过渡矩阵。
此矩阵左乘某向量在abc坐标中的坐标向量,可得到该向量在αβγ坐标系中的坐标向量;此矩阵的逆矩阵左乘某向量在αβγ坐标中的坐标向量,可得到该向量在abc坐标系中的坐标向量。
若将abc坐标变换到αβγ坐标的同时还将所得αβγ坐标系中的向量旋转θ角度,这样的变换称为Park变换。
显然,abc坐标到αβγ坐标的变换矩阵是Park变换矩阵在θ=0时的特例
不同情况下公式的第三行不一样。
matlab坐标系变换
matlab坐标系变换在MATLAB中,可以使用一些函数和操作实现坐标系的变换。
常见的一些方法有以下几种:1. 平移变换(Translation):通过对坐标系所有点的位置进行加减偏移来实现平移变换。
可以使用矩阵加法或点运算函数来实现。
例如,将坐标系中的点(x, y)平移一定偏移量(dx, dy),可以使用如下代码:```matlabx = x + dx;y = y + dy;```2. 旋转变换(Rotation):通过旋转坐标系中的点来实现旋转变换。
可以使用旋转矩阵或旋转函数来实现。
例如,将坐标系中的点(x, y)按逆时针方向旋转一个角度theta,可以使用如下代码:```matlabtheta_rad = deg2rad(theta); % 将角度转换为弧度x_rot = x*cos(theta_rad) - y*sin(theta_rad);y_rot = x*sin(theta_rad) + y*cos(theta_rad);```3. 缩放变换(Scale):通过缩放坐标系中的点的坐标值来实现缩放变换。
可以使用缩放矩阵或缩放函数来实现。
例如,将坐标系中的点(x, y)在x轴和y轴上分别缩放为原来的两倍,可以使用如下代码:```matlabscale_x = 2; % x轴缩放倍数scale_y = 2; % y轴缩放倍数x_scaled = x * scale_x;y_scaled = y * scale_y;```以上仅是坐标系变换的一些基本操作,实际应用中可能还会涉及更复杂的变换,如剪切、投影等。
MATLAB还提供了一些专门用于处理坐标系变换的函数和工具箱,例如`affine2d`类和`imwarp`函数,可以更方便地进行坐标系变换操作。
MATLAB中的abc-dq相坐标变换

MATLAB中的abc-dq相坐标变换坐标变换总结姓名:日期:2011.11.4坐标变换的总结一. 由三项坐标系变换到两相旋转坐标系1. 三相到两相静止坐标系的变换 首先,确定三相电压的相序:cos()2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-=-在坐标图上表示三相到两相静止坐标系上的变换,如图所示:Au Bu Cu αβ图1 3-2s 变换由上图,我们可以将A u 、B u 、c u 转化到两相静止坐标系上,具体等式如下:211()322233()322A B C B C u u u u u u αβ⎧=--⎪⎪⎨⎪=-⎪⎩插入系数2、3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。
后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:111222333022A B C uu u u u αβ⎡⎤⎡⎤--⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥-⎣⎦⎢⎣⎦2. 两相静止坐标系到两相旋转坐标系的变换我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。
坐标变换如图所示:βθdq图2 2s-2r 变换此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。
cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦二. 反向变换1. 若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即可,根据图二,我们可以得到:cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤-⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦2. 同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换:1021332132A B C u u u u u αβ⎡⎤⎢⎥⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎣⎦⎢-⎢⎣三. 关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序cos()2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-=-经过变换后:211()322A B c u u u u α=-- 进而,我们可以推知:211()322B A C U U U U α••••=--22211()322211(1)32223()32A A A A A AU a U aU U a a U U ••••••=--=--==其中,a=23jeπ。
matlab不同坐标系寻找相同坐标系的方法

一、引言Matlab作为一款强大的数学建模和数据分析软件,广泛应用于科学研究和工程领域。
在Matlab中,常常需要在不同的坐标系之间进行坐标转换,以便进行数据处理和可视化。
本文将介绍在Matlab中如何进行不同坐标系间的转换,并探讨寻找相同坐标系的方法。
二、Matlab中的坐标系1. 直角坐标系直角坐标系是我们最常见的坐标系,用于描述二维或三维空间中的点。
在直角坐标系中,点的位置由x、y、z坐标确定,可以通过向量和矩阵的形式进行表示。
2. 柱坐标系柱坐标系是一种常用的极坐标系,用于描述平面上的点。
在柱坐标系中,点的位置由极径和极角确定,可以通过向量和矩阵的形式进行表示。
3. 球坐标系球坐标系是一种常用的三维坐标系,用于描述空间中的点。
在球坐标系中,点的位置由径向、极角和方位角确定,可以通过向量和矩阵的形式进行表示。
三、坐标系转换在Matlab中,可以通过一些内置函数或自定义函数来实现不同坐标系之间的转换。
以下是一些常见的坐标系转换方法:1. 直角坐标系转柱坐标系在Matlab中,可以使用cart2pol函数将直角坐标系的点转换为柱坐标系的点。
该函数接受三个输入参数,分别为x、y和z坐标,返回极径和极角。
2. 直角坐标系转球坐标系Matlab中提供了cart2sph函数用于将直角坐标系的点转换为球坐标系的点。
该函数接受三个输入参数,分别为x、y和z坐标,返回径向、极角和方位角。
3. 柱坐标系转直角坐标系使用pol2cart函数可以将柱坐标系的点转换为直角坐标系的点。
该函数接受极径和极角作为输入参数,返回x和y坐标。
4. 球坐标系转直角坐标系利用sph2cart函数可以将球坐标系的点转换为直角坐标系的点。
该函数接受径向、极角和方位角作为输入参数,返回x、y和z坐标。
四、寻找相同坐标系的方法在实际应用中,有时候需要确定不同坐标系中的点是否表示的是同一个位置。
Matlab提供了一些方法来解决这个问题:1. 判断坐标系的类型通过观察给定的坐标点的数据结构,可以大致判断其所处的坐标系类型。
同步电动机的MATLAB仿真
摘要采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。
本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。
再使用MATLAB中用于仿真模拟系统的SIMULINK对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。
系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。
关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。
目录第1章引言 ........................................................................................................................................ - 1 - 1.1引言 (1)1.2同步电机概述 (1)1.3系统仿真技术概述 (2)1.4仿真软件的发展状况与应用 (2)1.5MATLAB概述 (2)1.6S IMULINK概述 (4)第2章同步电机基本原理 (5)2.1理想同步电机 (5)2.2 ABC/DQ模型的建立 (5)第3章仿真系统总体设计 (9)3.1系统对象 (9)3.2系统分块 (9)3.3控制反馈环节 (10)第4章仿真系统详细设计 (12)4.1总体设计 (12)4.2具体设计 (12)4.3控制反馈环节 (15)第5章系统仿真运行 (16)5.1输出结果稳定情况 (16)结论 (19)致谢 (20)参考文献 (21)第1章引言1.1引言世界工业进步的一个重要因素是过去几十年中工厂自动化的不断完善。
MATLAB中的abc-dq相坐标变换

坐标变换总结姓名:日期:2011.11.4坐标变换的总结一.由三项坐标系变换到两相旋转坐标系1.三相到两相静止坐标系的变换首先,确定三相电压的相序:cos()2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-=-在坐标图上表示三相到两相静止坐标系上的变换,如图所示:图13-2s 变换由上图,我们可以将A u 、B u 、c u转化到两相静止坐标系上,具体等式如下:211()3222()322A B C B C u u u u u αβ⎧=--⎪⎪⎨⎪=-⎪⎩插入系数2、3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。
后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:1112223022A B C u u u u u αβ⎡⎤⎡⎤--⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥-⎣⎦⎢⎥⎣⎦2.两相静止坐标系到两相旋转坐标系的变换我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。
坐标变换如图所示:图22s-2r 变换此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。
cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦二.反向变换1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即可,根据图二,我们可以得到:cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤-⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换:102133221322A B C u u u u u αβ⎡⎤⎢⎥⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎣⎦⎢⎥--⎢⎥⎣⎦三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序cos()2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-=-经过变换后:211()322A B c u u u u α=--进而,我们可以推知:211()322B AC U U U U α∙∙∙∙=--22211()211(1)32223()32A A A A A A U a U aU U a a U U ∙∙∙∙∙∙=--=--==其中,a=23j e π。
matlab 极坐标转换
Matlab 极坐标转换Matlab是一种强大的数值计算软件,它提供了许多强大的工具和函数,可以帮助用户进行各种数学计算和数据处理。
其中,Matlab也提供了方便的方法来进行极坐标和直角坐标之间的转换。
极坐标和直角坐标的定义在开始之前,让我们简要回顾一下极坐标和直角坐标的定义。
直角坐标是我们常见的坐标系统,它由x轴和y轴组成。
在直角坐标系中,坐标点由(x, y)表示,其中x表示水平方向上的位置,y表示垂直方向上的位置。
而极坐标则是由极径和极角组成的坐标系统。
在极坐标系中,一个点由(r, θ)表示,其中r表示点到原点的距离,θ表示点与正x轴之间的夹角。
Matlab中的极坐标转换函数Matlab提供了两个函数来进行极坐标和直角坐标之间的转换。
直角坐标转换为极坐标要将直角坐标(x, y)转换为极坐标(r, θ),可以使用Matlab中的cart2pol()函数。
该函数的语法如下:[theta, rho] = cart2pol(x, y)其中,x和y分别是直角坐标系中点的x和y坐标,theta和rho分别是计算得到的极坐标系中的极角和极径。
极坐标转换为直角坐标要将极坐标(r, θ)转换为直角坐标(x, y),可以使用Matlab中的pol2cart()函数。
该函数的语法如下:[x, y] = pol2cart(theta, rho)其中,theta和rho分别是极坐标系中的极角和极径,x和y分别是计算得到的直角坐标系中点的x和y坐标。
使用示例下面是一个简单的示例,演示了如何在Matlab中使用极坐标转换函数。
% 直角坐标转换为极坐标x = 3;y = 4;[theta, rho] = cart2pol(x, y);disp(['极坐标为:(', num2str(rho), ', ', num2str(theta), ')']);% 极坐标转换为直角坐标theta = pi / 4; % 45°rho = 5;[x, y] = pol2cart(theta, rho);disp(['直角坐标为:(', num2str(x), ', ', num2str(y), ')']);输出结果为:极坐标为:(5, 0.9273)直角坐标为:(3.5355, 3.5355)结论Matlab提供了方便的函数来进行极坐标和直角坐标之间的转换。
同步电机模型的MATLAB仿真

同步电机模型的MATLAB仿真摘要采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。
本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。
再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。
系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。
关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。
The Simulation Platform of Synchronous Machine by MATLABAbstract:The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance.Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK目录第1章引言 (1)1.1引言 (1)1.2同步电机概述 (1)1.3系统仿真技术概述 (2)1.4仿真软件的发展状况与应用 (2)1.5MATLAB概述 (2)1.6S IMULINK概述 (4)1.7小结 (5)第2章同步电机基本原理 (6)2.1理想同步电机 (6)2.2ABC/DQ模型的建立 (6)第3章仿真系统总体设计 (10)3.1系统对象 (10)3.2系统分块 (10)3.3控制反馈环节 (11)第4章仿真系统详细设计 (13)4.1总体设计 (13)4.2具体设计 (13)4.3控制反馈环节 (16)第5章系统仿真运行 (17)5.1输出结果稳定情况 (17)5.2小结 (20)第6章结论 (21)第7章致谢 (22)参考文献 (23)第1章引言1.1引言世界工业进步的一个重要因素是过去几十年中工厂自动化的不断完善。
基于Matlab异步电动机矢量控制系统的仿真

基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
matlab simulink 正负序提取模块 -回复

matlab simulink 正负序提取模块-回复在MATLAB Simulink中,正负序提取是一种重要的信号处理方法,用于将三相电源系统的正序和负序分离。
本文将逐步介绍正负序提取的原理、实现步骤以及在电力系统中的应用。
1. 正负序提取原理在三相电源系统中,正序是指三相电压或电流的相位相同、幅值相等的分量,通常表示为a、b、c相。
而负序则指三相电压或电流的相位相差120度,幅值相等的分量,通常表示为a'、b'、c' 相。
正负序提取模块的目的就是将三相信号中的正序和负序分离出来。
2. 正负序提取的Simulink实现步骤下面是正负序提取在Simulink中的实现步骤:步骤1:选择三个轴向三相信号输入在Simulink模型中,首先需要确定一个三轴向三相信号输入,可以是电压信号或者电流信号。
通常情况下,我们选择a、b、c三个轴向的电压信号进行正负序提取。
步骤2:进行坐标变换转换到αβ坐标系在三相电源系统的研究中,通常使用αβ坐标系表示三相信号。
α轴与a相相同,β轴与a相位差120度。
因此,需要进行坐标变换将三个轴向的信号转换为αβ坐标系下的信号。
步骤3:通过正负序提取模块分离正负序信号Simulink提供了正负序提取模块,可以直接使用该模块完成正负序的提取。
将第二步得到的αβ坐标系下的信号输入正负序提取模块,即可分离出正序和负序的信号。
步骤4:转换回三相轴相根据需要,可以选择将正负序信号转换回三相轴相。
这可以通过逆变换将αβ坐标系下的信号转换回三相信号。
3. 正负序提取在电力系统中的应用正负序提取在电力系统中有广泛的应用。
以下是一些常见的应用场景:故障检测和定位:在电力系统中,发生故障可能导致电压或电流的正负序失衡。
通过正负序提取模块,可以实时监测正负序信号的变化,从而检测和定位故障。
电力质量分析:电力质量问题如谐波、闪变等经常与正负序有关。
通过正负序提取,可以对三相电压或电流中的谐波进行分析和监测,并采取相应的措施改善电力质量。
坐标变换(abc坐标-αβ坐标-dq坐标)【转】

坐标变换(abc坐标-αβ坐标-dq坐标)【转】
写在前面:
鄙人小菜一枚,请各路大神轻拍砖。
我是在当时上电机课时第一次对派克变换有了印象,当时可是看晕了。
这段时间跟坐标变换接触较多,写点东西记录供参考。
注:此处采用经典派克变换,而非正交派克变换。
(具体可查看倪以信老师的<动态电力系统的理论和分析>)
正餐:
三相静止abc坐标系(3S)——两相静止αβ坐标系(2S)——两相同步旋转坐标系(2R)
(1)三相静止坐标系(3S)——两相静止坐标系(2S)
(2)两相静止坐标系(2S)——两相同步旋转坐标系(2R)
(3)三相静止坐标系(3S)——两相同步旋转坐标系(2R)。
在Matlab图像处理中极坐标与直角坐标矩阵的转换
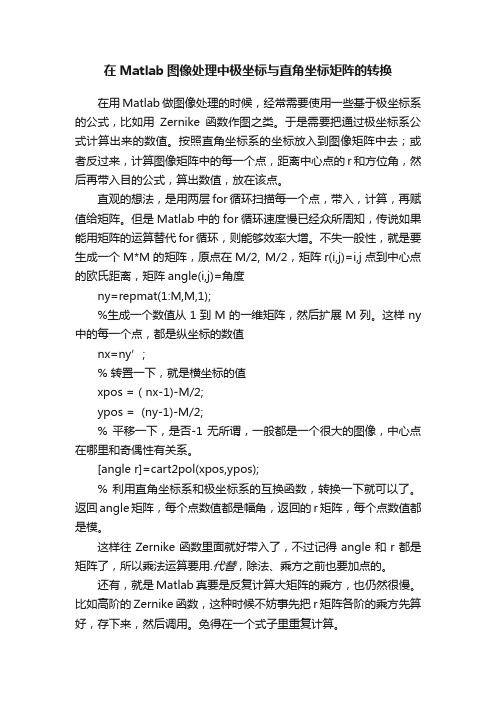
在Matlab图像处理中极坐标与直角坐标矩阵的转换在用Matlab做图像处理的时候,经常需要使用一些基于极坐标系的公式,比如用Zernike函数作图之类。
于是需要把通过极坐标系公式计算出来的数值。
按照直角坐标系的坐标放入到图像矩阵中去;或者反过来,计算图像矩阵中的每一个点,距离中心点的r和方位角,然后再带入目的公式,算出数值,放在该点。
直观的想法,是用两层for循环扫描每一个点,带入,计算,再赋值给矩阵。
但是Matlab中的for循环速度慢已经众所周知,传说如果能用矩阵的运算替代for循环,则能够效率大增。
不失一般性,就是要生成一个M*M的矩阵,原点在M/2, M/2,矩阵r(i,j)=i,j点到中心点的欧氏距离,矩阵angle(i,j)=角度ny=repmat(1:M,M,1);%生成一个数值从1到M的一维矩阵,然后扩展M列。
这样ny 中的每一个点,都是纵坐标的数值nx=ny’;% 转置一下,就是横坐标的值xpos =(nx-1)-M/2;ypos = (ny-1)-M/2;% 平移一下,是否-1无所谓,一般都是一个很大的图像,中心点在哪里和奇偶性有关系。
[angle r]=cart2pol(xpos,ypos);% 利用直角坐标系和极坐标系的互换函数,转换一下就可以了。
返回angle矩阵,每个点数值都是幅角,返回的r矩阵,每个点数值都是模。
这样往Zernike函数里面就好带入了,不过记得angle和r都是矩阵了,所以乘法运算要用.代替,除法、乘方之前也要加点的。
还有,就是Matlab真要是反复计算大矩阵的乘方,也仍然很慢。
比如高阶的Zernike函数,这种时候不妨事先把r矩阵各阶的乘方先算好,存下来,然后调用。
免得在一个式子里重复计算。
转自:。
在matlab中进行遥感影像地理坐标的相互转换

在matlab中进⾏遥感影像地理坐标的相互转换
在matlab中进⾏图像处理,⼀般使⽤的都是图像本地坐标,以左上⾓(1,1)开始。
处理完成后,如果要将结果在带地理坐标的遥感影像中显⽰,或者需要输出成shp⽂件,就需要涉及到本地坐标和地理坐标的转换,我们可以使⽤pix2map函数来实现这个功能。
clc;clear;close all;
[pic, R] = geotiffread('boston.tif'); %读取tif图像
figure(1),imshow(pic);
% pic即为本地图像,下⾯对本地图像进⾏操作
gray=rgb2gray(pic);
bw=im2bw(gray,0.1); %阈值分割
bw=1-bw;
bw1 = bwareaopen(bw,500000); %删除⾯积⼩于500000的区域
bw2=imfill(bw1,'holes'); %填充孔洞
figure(2),imshow(bw2);
bw3=bwboundaries(bw2); %得到边缘轮廓
data=bw3{1,1}; %得到轮廓线的坐标,⼀个N*2的矩阵,此坐标为本地图像坐标
[lonX,latY]=pix2map(R,data(:,1),data(:,2)); %将本地图像坐标转换为地理坐标
figure(3),axis off;
mapshow('boston.tif'); %显⽰带地理坐标的遥感影像
mapshow(lonX,latY,'Color','r'); %在遥感影像上显⽰轮廓。
第五章_MATLAB与电力系统仿真

MATLAB应用技术 MATLAB应用技术
仿真参数设置 在电路图菜单选项中,选择仿真(Simulation)菜单,激 活仿真参数(Simulation Parameters)命令,即可弹出仿 真参数对话框,根据相应选项对其进行设置: 开始时间(Start time):0 停止时间(Stop time):0.4 求解程序类型(Type)选项:可变步长(Variable), Ode45(Domand-Price) 最大步长(Max step size)选项:自动(Auto) 最小步长(Min step size)选项:自动(Auto) 初始步长(Initial step size)选项:自动(Auto) 相对容差(Relative tolerance)选项:1e-3 绝对容差(Absolute tolerance)选项:1e-6
MATLAB应用技术 MATLAB应用技术
仿真结果及分析 合理设置示波器 参数后,激活仿 真按钮,得到仿 真结果如图所示。 示波器1输出的电 压波形为交流电 压源U1和U2的叠 加,横轴为时间 轴,纵轴为电压 幅值。从仿真结 果可见,在交流 电路中,多个交 流电压源共同作 用的结果等效于 一个非线性电压 源。
MATLAB应用技术 MATLAB应用技术
2.电力系统元件库简介 在电力系统元件库对话框中包含了10类库元件,分别是 电源元件(Electrical Sources)、线路元件(Elements)、 电力电子元件(Power Electronics)、电机元件 (Machines)、连接器元件(Connectors)、电路测量仪器 (Measurements)、附加元件(Extras)、演示教程 (Demos)、电力图形用户接口(Powergui)、电力系统元 件库模型(Powelib_models)。 1)电源元件 电源元件库包括7类元件,分别为:直流电压源元件(DC Voltage Source),交流电压源元件(AC Voltage Source),交流电流源元件(AC Current Source),受控 电压源元件(Controlled Voltage Source),受控电流源 元件(Controlled Current Source),三相电源元件(3Phase Source),三相可编程电压源元件(3-Phase Programmable Voltage Source)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标变换总结
姓名:
日期:2011.11.4
坐标变换的总结
一.由三项坐标系变换到两相旋转坐标系
1.三相到两相静止坐标系的变换首先,确定三相电压的相序:
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-
在坐标图上表示三相到两相静止坐标系上的变换,如图所示:
图13-2s 变换
由上图,我们可以将A u 、B u 、c u
转化到两相静止坐标系上,具体等式如下:
211()3222()322A B C B C u u u u u αβ⎧=--⎪⎪⎨⎪=-⎪⎩
插入系数2、
3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。
后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:
1112223022A B C u u u u u αβ⎡⎤⎡⎤--
⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥-⎣⎦⎢⎥⎣⎦2.两相静止坐标系到两相旋转坐标系的变换
我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。
坐标变换如图所示:
图22s-2r 变换
此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。
cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦
⎣⎦二.反向变换
1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即
可,根据图二,我们可以得到:
cos sin sin cos d q u u u u αβθθθθ⎡⎤⎡⎤-⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换:
102133221322A B C u u u u u αβ⎡⎤⎢⎥⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎣⎦⎢⎥--⎢⎥⎣⎦
三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-经过变换后:
211()322
A B c u u u u α=--
进而,我们可以推知:
211()322
B A
C U U U U α∙
∙∙∙=--22211()322211(1)32223()32A A A A A A U a U aU U a a U U ∙∙∙∙∙∙
=--=--==其中,a=23j e π。
同理,我们可以求的A
q U jU ∙∙=-即
cos()
cos(2d A m q m u u U wt u U wt π
===-合成矢量
sin t cos cos()cos()2
d q
m m t
jarc g t m U u ju U wt jU wt U e ωωπ
=+=+-=显然,此时空间相量的模和时间相量的模相等。
至于为什么要保持模不变,我没找到相关的说明,谈一下我的理解。
如果只考虑坐标变换的话,那么乘不乘这个系数并没有什么实际意义,也就是说,之所以乘这个系数是为了方便后续模块的使用。
在此次实验中,αβ-的输出主要是给SVPWM 使用。
而6个扇区的参考量i U 的大小一般取的是直流侧电压。
乘以2/3后,合成空间矢量的模就等于输出正弦信号的的模,我们知道输出正弦信号的最大值m U 必然会小于直流侧电压DC U ,这样取值后,在SVPWM 调制时带来的好处就是可以保证在任意扇区两个非零导通时间12PWM t t T +≤.我们知道,当12PWM t t T +=时合成矢量旋转形成一个圆,在该圆内,合成的输出信号为正弦信号,超出这个圆,输出为非正弦信号。
也就是说,乘以系数2/3之后,可以保证合成矢量在上述的圆内,保证输出为正弦信号。
四.MATLAB 中的abc-aq 变换
首先,MATLAB 中的电压参考量取得和我们常用的不同,为正弦信号,如下所示:
sin()
2sin()34sin()3A m B m c m u U wt u U wt u U wt ππ==-
=-和我们的相位相差了90度,相应的其dq 轴的选取也和我们不同(实际上MATLAB 中的q 轴和我们的d 轴重合)。
我们不关心他具体是怎么变换的,我们更关心他的输出和我们变换方式下的输出是否一致。
下面是我的推导过程:1.按照我们的的变换方式,输入为余弦信号,
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-输出为:
224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω⎡⎤=
+-+-⎢⎥⎣⎦⎡⎤=-----⎢⎥⎣⎦
在MATLAB 中,输入为正弦信号,和我们的相位相差了90度,其输出为:224sin sin()sin()333224cos cos()cos()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω⎡⎤=+-+-⎢⎥⎣⎦
⎡⎤=
+-+-⎢⎥⎣⎦我们知道,在两个变换中,旋转角都是取得A 相的相角,也就是说在MATLAB 的变换中,其相角相当于余弦量的相角加上90度,sin cos 2t t πωω=+,
将该式带入到MATLAB 的输出中,并化简,我们可以得到:
22224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω⎡⎤=
+-+-⎢⎥⎣⎦⎡⎤=-----⎢⎥⎣⎦这个表达式和按照我们变换方式变换获得的输出是一致的,也就是说,MATLAB 的dq 相当于将我们的dq 轴旋转了90度,但是dq 本身就是一个旋转的坐标系,因而我们可以认为,这两种方式获得的输出是完全等价的。
另外,在MATLAB 中,为了验证两种变换方式下,控制方式相同,我们可以交换dq 的控制信号,观察实际的控制效果,来证明刚才的结论是否成立。
对于基于电压矢量的控制,如果我们令Iqref=0的话,那么输出电流应该和
电网电压同相位。
如果这两种变换方式不等效的话,则电流和电压不可能同相位。
按照这种思想,在MATLAB中仿真,得到输出结果如图所示,此时变换输出Iq 与Iqref=0做差,做为PI控制器的输入信号。
而将dq的控制信号交换后,可得下面的输出,也就是说,此时电流和电网电压相位相差了90度。
由上两图可知,两种变换的输出是等效的。