凸轮机构运动特性的分析与研究
试述凸轮机构从动件运动规律特点及应用

试述凸轮机构从动件运动规律特点及应用凸轮机构从动件运动规律特点及应用凸轮机构是一种重要的机械传动装置,主要由一个凸轮和一个从动件组成。
凸轮的作用是驱动从动件沿着一定的轨迹进行运动,从而实现机械传动的功能。
从动件的运动规律特点及应用是凸轮机构设计的一个重要考虑因素,具体体现在以下几个方面。
从动件的运动规律特点从动件的运动规律特点主要表现在其运动形式、运动速度和加速度等方面。
从动件的运动形式通常为直线运动或圆周运动,其运动速度和加速度的大小主要取决于凸轮的参数和从动件的特性。
例如,当凸轮的参数定死后,从动件的运动速度和加速度就可以通过调整机构的结构参数来达到所需的目标。
从动件的运动规律特点还表现在其运动精度方面。
为了提高从动件的运动精度,设计者需要考虑从动件的加工工艺和装配过程。
例如,对于不同精度的从动件,可以采用不同的装配方式和加工工艺,以保证从动件的精度达到设计要求。
凸轮机构从动件的应用凸轮机构从动件的应用非常广泛,涉及到机械工程、机床、汽车、飞机、船舶等各个领域。
从动件的设计和应用,可以提高机械传动的精度、效率和可靠性,从而满足各种机械传动的要求。
凸轮机构从动件的应用,还可以涉及到各种机械工程领域。
例如,在机床中,从动件可以作为刀具的驱动机构,来实现刀具的切削和研磨等功能。
在汽车和飞机中,从动件可以作为发动机的离合器和启动器,实现汽车和飞机的启动和加速等功能。
在船舶中,从动件可以作为船桨的驱动机构,实现船只在水面上的前进和操纵等功能。
总结起来,凸轮机构从动件运动规律特点及应用,对于实现机械传动的精度、效率和可靠性,有着重要的作用。
此外,在机械工程领域中,凸轮机构从动件的应用,还可以涉及到各种不同的机械工程领域。
适用于高速运动的凸轮机构从动件运动规律

适用于高速运动的凸轮机构从动件运动规律凸轮机构是常见的从动件,它利用凸轮的移动和定位来控制从动件的运动轨迹。
传统的凸轮机构可以在较低速度下实现良好的精度和定位能力,但是当要求高速节拍时,其节拍分辨率会受到限制,甚至出现扭曲。
为此,本文详细研究了高速运行时凸轮机构从动件运动规律,以便在此种情况下获得准确的定位精度和节拍分辨率。
1.对凸轮机构运动特性的研究首先,本文从理论上研究了凸轮机构的运动特性,该机构的形状是一个将偶合的凸轮圈板以浮动支承和滚动支承相互桥接的凸轮机构。
其动作过程可以分为三步:凸轮离合,凸轮移动以及凸轮定位。
其中,凸轮离合的目的是为了在偶合的凸轮圈板的表面形成有效的离合面,以实现凸轮间的连接;凸轮移动的目的是为了实现凸轮之间的位置变换,以实现从动件的移动;凸轮定位的目的是为了保证凸轮不滑动,也可以认为是为了实现从动件的节拍。
在凸轮机构运动特性的研究中,我们对凸轮机构的运动特性,以及其在不同节拍下的运动轨迹和运动规律进行了详细分析。
2.凸轮机构从动件运动轨迹分析接下来,我们详细研究凸轮机构从动件在高速运行时的运动规律。
研究发现,当从动件速度较低时,可通过改变凸轮离合力和移动距离来控制从动件的运动轨迹。
但是,当从动件运行速度加快时,凸轮离合力不变,而凸轮移动距离会因从动件节拍增加而减小,从而造成从动件运动轨迹的不规则性,从而影响从动件的定位精度和节拍分辨率。
3.凸轮机构从动件运动规律研究基于凸轮机构从动件运动轨迹的分析结果,本文研究了从动件在高速运行时的运动规律,从而获得良好的定位精度和节拍分辨率。
这其中主要有三个方面:(1)增加凸轮离合力,减小凸轮移动距离:凸轮离合力主要是指所需要的力量来将凸轮离合,凸轮移动距离则是指凸轮在离合状态下移动的总距离。
当凸轮离合力增加时,凸轮移动距离会减少,这将有助于保持凸轮的稳定位置,从而能够提高从动件的定位精度。
(2)增加凸轮圈板的硬度:凸轮圈板的硬度主要是指其偶合部分的硬度。
凸轮机构的运动规律

凸轮机构的运动规律凸轮机构是一种常用于机械传动中的机构,它利用凸轮的形状和运动规律来实现特定的运动要求。
凸轮机构的运动规律对于机械设计和运动控制具有重要意义。
凸轮机构的运动规律有以下几个方面:1. 凸轮的运动规律凸轮的运动规律是凸轮机构的基础,它决定了凸轮机构的输出运动。
通常情况下,凸轮的运动是旋转运动,凸轮的轮廓形状决定了其运动过程中的位置和速度变化。
凸轮的运动规律可以通过数学建模和实验验证来确定,常见的凸轮运动规律有简谐运动、等角速度运动、等速运动等。
2. 凸轮与从动件的运动关系凸轮与从动件的运动关系是凸轮机构的核心内容,它描述了凸轮运动与从动件的位置和速度之间的关系。
根据凸轮的形状和运动规律,从动件可以做直线运动、往复运动、转动运动等。
凸轮机构的设计目标就是使凸轮与从动件的运动关系能够满足特定的要求,如控制从动件的速度、加速度和位置等。
3. 凸轮机构的运动周期凸轮机构的运动周期是指凸轮一次完整运动所经历的时间。
凸轮机构的运动周期与凸轮的运动规律和从动件的运动规律密切相关。
在设计凸轮机构时,需要根据具体的运动要求确定凸轮的运动周期,使凸轮机构能够满足系统的运动速度和节奏要求。
4. 凸轮机构的运动稳定性凸轮机构的运动稳定性是指在运动过程中凸轮和从动件之间的运动关系是否能够保持稳定。
凸轮机构的运动稳定性取决于凸轮的形状和运动规律,以及从动件的运动特性。
如果凸轮机构的运动稳定性不好,就会导致从动件运动不平稳,影响机械系统的正常工作。
5. 凸轮机构的优化设计凸轮机构的优化设计是指在满足特定运动要求的前提下,通过合理设计凸轮的形状和运动规律,使凸轮机构具有更好的运动性能和工作效率。
优化设计可以通过数学建模和仿真分析来实现,以提高凸轮机构的工作精度和可靠性。
总结起来,凸轮机构的运动规律对于机械设计和运动控制具有重要意义。
凸轮的运动规律、凸轮与从动件的运动关系、凸轮机构的运动周期、运动稳定性以及优化设计等方面的研究,可以为凸轮机构的设计和应用提供理论依据和实践指导,进一步推动机械传动技术的发展和创新。
说出凸轮机构从动件常用运动规律

说出凸轮机构从动件常用运动规律1. 引言1.1 概述凸轮机构是一种常见的运动传动装置,通过凸轮和从动件的配合实现不同运动规律的转换。
凸轮机构被广泛应用于各种机械设备中,如汽车发动机、工业机械等领域。
了解凸轮机构从动件的常用运动规律对于理解其工作原理以及设计和优化具有重要意义。
本文将重点介绍凸轮机构从动件常用的三种运动规律,即正圆运动规律、椭圆运动规律和抛物线运动规律。
通过详细讲解每种运动规律的原理和特点,结合相关的应用案例,旨在帮助读者全面了解这些常见的凸轮机构从动件运动规律。
1.2 文章结构本文分为五个部分进行阐述。
首先,在引言部分对凸轮机构进行了概述,并说明了文章内容和结构。
接下来,在第二部分中简要介绍了凸轮机构的定义与分类以及基本组成部分,同时列举了该装置在各个应用领域中的实际应用。
然后,在第三部分中简要描述了凸轮机构从动件常用的三种运动规律,即正圆运动规律、椭圆运动规律和抛物线运动规律。
在第四部分中,将分别对这些从动件的常用运动规律进行详细解析,并通过实际应用案例加深理解。
最后,在结论与展望部分总结文章的主要内容,并对未来凸轮机构研究方向进行展望。
1.3 目的本文旨在介绍凸轮机构从动件常用的运动规律,包括正圆、椭圆和抛物线三种类型。
通过阐述每一种运动规律的原理和特点,读者能够对凸轮机构从动件的工作原理有更深入的理解,并能够应用于具体的工程设计和优化中。
同时,通过引入实际案例,希望读者能够更好地理解这些运动规律在实际中的应用价值。
2. 凸轮机构简介:2.1 定义与分类:凸轮机构是一种常见的机械传动装置,由凸轮和从动件组成。
凸轮是一个具有非圆周运动的特殊零件,通过转动或移动凸轮使得从动件产生特定的运动规律。
根据凸轮曲线形状和运动规律的不同,凸轮机构可以分为三类主要类型:正圆轨迹型、椭圆轨迹型和抛物线轨迹型。
2.2 基本组成部分:典型的凸轮机构包括凸轮、滑块、连接杆、曲柄等组成部分。
其中,凸轮为核心部件,其曲线形状决定了从动件的运动规律。
对心从动偏心轮凸轮机构运动的讨论
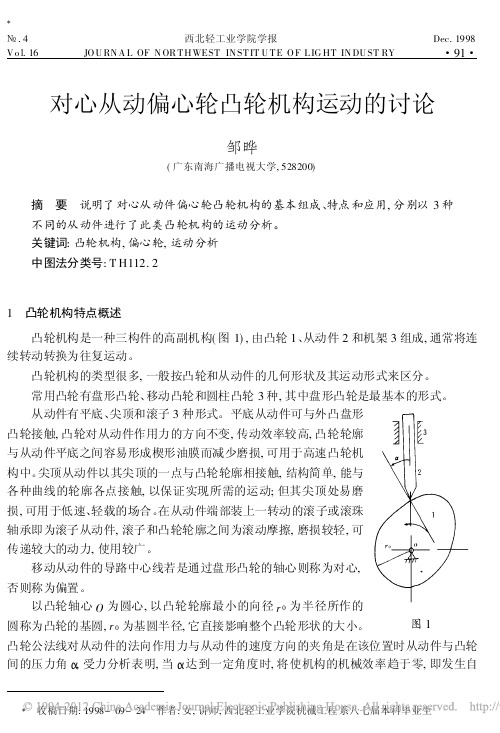
№.4 西北轻工业学院学报 Dec.1998V o l.16 JO U RN A L OF N OR T HWEST IN ST IT U T E O F L IG HT IN DU ST RY ・91・对心从动偏心轮凸轮机构运动的讨论邹晔(广东南海广播电视大学,528200)摘 要 说明了对心从动件偏心轮凸轮机构的基本组成、特点和应用,分别以3种不同的从动件进行了此类凸轮机构的运动分析。
关键词:凸轮机构,偏心轮,运动分析中图法分类号:T H112.21 凸轮机构特点概述凸轮机构是一种三构件的高副机构(图1),由凸轮1、从动件2和机架3组成,通常将连续转动转换为往复运动。
凸轮机构的类型很多,一般按凸轮和从动件的几何形状及其运动形式来区分。
常用凸轮有盘形凸轮、移动凸轮和圆柱凸轮3种,其中盘形凸轮是最基本的形式。
图1从动件有平底、尖顶和滚子3种形式。
平底从动件可与外凸盘形凸轮接触,凸轮对从动件作用力的方向不变,传动效率较高,凸轮轮廓与从动件平底之间容易形成楔形油膜而减少磨损,可用于高速凸轮机构中。
尖顶从动件以其尖顶的一点与凸轮轮廓相接触,结构简单,能与各种曲线的轮廓各点接触,以保证实现所需的运动;但其尖顶处易磨损,可用于低速、轻载的场合。
在从动件端部装上一转动的滚子或滚珠轴承即为滚子从动件,滚子和凸轮轮廓之间为滚动摩擦,磨损较轻,可传递较大的动力,使用较广。
移动从动件的导路中心线若是通过盘形凸轮的轴心则称为对心,否则称为偏置。
以凸轮轴心O 为圆心,以凸轮轮廓最小的向径r 0为半径所作的圆称为凸轮的基圆,r 0为基圆半径,它直接影响整个凸轮形状的大小。
凸轮公法线对从动件的法向作用力与从动件的速度方向的夹角是在该位置时从动件与凸轮间的压力角 ,受力分析表明,当 达到一定角度时,将使机构的机械效率趋于零,即发生自 收稿日期:1998-09-24 作者:女,讲师,西北轻工业学院机械工程系八七届本科毕业生锁现象。
凸轮机构运动分析及创新设计试验平台研制

摘要凸轮机构是工程中用来实现机械化和自动化的重要驱动和控制机构之一,在轻工、食品、纺织、印刷、医药、标准零件制造、交通运输等领域运行的工作机械中都获得广泛应用。
但随着社会发展和科技进步,为了提高产品的质量和生产率,作为机械设备核心部件的凸轮机构而言,必须进一步提高它的设计水平,在解析法设计的基础上开展计算机辅助设计的研究和推广应用。
因此,开展对凸轮机构运动分析的研究,对于揭示机构的运动性能,进行机构的优化设计和动力学分析有着重要的实际意义。
本文首先介绍了凸轮机构的发展概况,提出课题的背景和意义,接着指出国内外研究的趋势和国内高校凸轮机构实验仅局限于对运动参数的测量与分析,然后提出以现实生活中最常用的一些凸轮为基础来研究凸轮机构试验平台中从凸轮轮廓设计到加工到试验这一整个系统构成。
凸轮轮廓线的设计在解析法的基础上用计算机软件进行绘制。
凸轮加工的方法用最常见的线切割加工,用CAXA线切割软件来辅助写代码。
平台可测量盘形凸轮,圆柱凸轮,直动从动件及摆动从动件组成的不同的凸轮机构的运动特性。
从动件的回复力采用恒定重力的重力回复,直动的轨道用直线导轨,进一步的提高测量精度。
在实验台中各个传感器的设计位置,可以让学生直观去观察从动件的速度、加速度;同时,为了让实验台的测量数据更加丰富,在实验台上加上旋转编码器,就可以观察和研究凸轮机构的在运行中输入轴的速度,让整个实验台的功能更加的强大,实验内容更加丰富,对凸轮机构运动研究也很有帮助。
关键词:凸轮机构;运动分析;解析法;试验台;软件辅助设计AbstractThe cam mechanism is one of the drive and control mechanism used to achieve the mechanization and automation project, running in the field of light industry, food, textile, printing, medicine, standard parts manufacturing, transportation machinery are widely available. With the social development and scientific and technological progress in order to improve product quality and productivity, as the core components of the cam mechanism of the machinery and equipment necessary to further improve the design level, on the basis of the analytical method designed to carry out the study of computer-aided design and application. Therefore, to carry out the analysis of motion of the cam mechanism to reveal the kinematic performance, the optimal design of the institutions and dynamics analysis has important practical significance. This paper first introduces the overview of the development of the cam mechanism, put forward the background and significance of the topic, then pointed out that research trends at home and abroad and domestic universities cam mechanism experiment is only limited to the measurement and analysis of motion parameters, and then put forward to the most commonly used in real life cam based design of an innovative test platform to conduct a series of experiments to design, analysis and testing of the cam mechanism. Cam profile design computer software to draw on the basis of the analytical method. Cam processing method with the most common line cutting, with CAXA line cutting software to assist write code. Platform to measure disk cam, cylindrical cam, direct-acting the motion characteristics of the follower and oscillating follower cam mechanism. The restoring force of the driven member with constant gravity gravity reply movable straight track with a linear guide, and further improve the measurement accuracy. In the experimental Taichung sensor design, allows students intuitive to observe the follower velocity, acceleration; richer, in orderto allow the measurement data of the bench, and rotary encoders, can be observed in the experimental stage, and research the cam mechanism in the operation of the speed of the input shaft, so that the entire bench more powerful experimental richer, the movement of the cam mechanism is also helpful.Keywords:cam mechanism; motion analysis; analytical method; test bench; software aided design目录摘要Abstract第1章绪论 (1)1.1 引言 (1)1.2 凸轮机构的研究现状和发展趋势 (2)1.1.1 国内外凸轮机构研究现状 (2)1.1.2 凸轮机构研究趋势 (3)1.3 课题设计的内容和意义 (4)第2章凸轮机构的设计理论 (6)2.1凸轮机构的基本参数 (6)2.2 从动件运动规律 (7)2.3凸轮轮廓曲线设计 (10)第3章凸轮的加工方法 (14)3.1 划线加工 (14)3.2 万能铣床加工 (14)3.3数控机床加工 (15)3.4 仿形机床加工 (16)3.5 电火花机床加工 (17)第4章凸轮机构实验平台 (22)4.1 凸轮实验平台的组成 (22)4.1.1直动从动件结构 (22)4.1.2摆动从动件结构 (24)4.1.3圆柱凸轮结构 (24)4.2凸轮机构实验台传动设计 (25)4.2.1选择传动方案 (25)4.2.2 选择电动机 (25)4.2.3涡轮蜗杆减速器 (25)4.2.4同步带传动设计 (26)4.2.5 从动件组件设计 (30)4.3 传感器选择 (32)4.3.1传感器概述 (32)4.3.2传感器选用原则 (33)4.3.3角位移传感器的选择 (34)4.3.4直线位移传感器选择 (36)第5章试验台运动仿真 (37)5.1运动仿真简介 (37)5.2Pro/ENGINEER仿真简介 (38)5.3凸轮机构试验平台运动仿真 (38)第6章总结和展望 (41)参考文献 (42)致谢 (43)第1章绪论1.1 引言凸轮机构是一种重要的驱动和控制机构用来实现机械化跟自动化,广泛的应用在轻工、发动机、纺织、印刷等工业机械中。
适用于高速运动的凸轮机构从动件运动规律
适用于高速运动的凸轮机构从动件运动规律
凸轮机构是高速运动系统中常用的机构之一,它有许多独特的优势,例如简单结构、低噪声、低抖动和高效率,可以得到良好的使用效果。
它形成了一个组合机构,由一个主动件和一个从动件组成,主动件可以按照一定的规则提供给从动件一定的舵角输出,从动件就可以运动到指定的方向。
从动件的运动规律是凸轮机构的核心机理,它决定了它的效率和精度。
它的运动是通过凸轮的旋转轴的运动而实现的,它的运动状态有相应的角度和三角形参数,旋转轴一次可以转动多个,或者转动多个齿杠构建由多个梅花状物质物体组成的旋转平台,甚至可以是梅花状和凸轮类型的复杂构型。
这些梅花能够相互交叉组合,具有螺旋和曲线的运动特性,根据不同的组合方式,可以形成多种规定的梅花扭曲运动轨迹。
而凸轮机构的运动会受到此轨迹的影响,因此从动件的运动轨迹及其坐标角度会得到规定,形成从动件端面相对于主动件端面的两个锥体,也就是“相齿梯形轨迹”,可以得到高速运动、低噪声、低抖动和高效率的效果。
除此之外,凸轮机构还能够实现复合运动,也就是说既可以实现一次性连续运动,也可以实现不同的多次转向运动,这样的从动件的运动轨迹变得更加复杂多样,需要考虑到不同轴上的梅花形运动和参数关系。
总结来说,凸轮机构从动件的运动规律是复杂的,但它同时具有简单直观的结构,可以实现比较高的高速运动效果,具有低噪声、低抖动和高效率的特点,非常适用于高速运动领域。
凸轮机构提供给我们一种非常有效的高效运动机构,可以满足人们在机械设计和机械应用中的需求,在满足人们的要求的同时,也促进了机械产业的发展。
机械设计-凸轮机构的运动规律分析

s
h
2h p
A
0
5v
1 6
2 7
3 8
a
φ
4φ
φ
φ
φ
φ
小结
1.运动过程分析
运动循环和运动参数
2.从动件的运动规 律
运动规律 等速运动规律 等加速等减速运动 余弦加速度运动规律 正弦加速度运动规律
运动特性
有刚性冲击
柔性冲击 柔性冲击 无冲击
适用场合
低速、轻载
中速、 轻载 中速、中载
✓ 等加速等减速运动规律(线运动规律(正弦加速度运动律)
1.等速运动规律
定义 从动件在推程或回程作等速运动。
启动瞬间: 速度由0→v0,a 由0→∞ 终止瞬间: 速度由v0→0,a 由0→-∞
冲击特性:始点、末点刚性冲击(F=ma) 适用场合:低速轻载
s h
O
v
O
a
∞
O
v0
φ φ
φ φ
φ φ
-∞
2.等加速等减速运动规律 定义 从动件在推程或回程的前半行程作等加速 运动,后半行程作等减速运动。
运动线图 从动件位移方程
抛物线
动力特性 加速度在运动的起始、中间和终止 位置有突变。
存在柔性冲击 (F=ma)
适用场合 中速轻载。
A
B
3.简谐(余弦加速度)运动规律
近休止:从动件在初始位置静止不动。 近休止角 :凸轮转过角度 Φs´ 凸轮与从动件的关系: 从动件的运动规律取决于凸轮的轮廓曲
二、从动件的运动规律
从动件的运动规律:从动件的位移(s)、速度(v)和加速 度(a)随时间(t)或凸轮转角(φ)的变 化规律。
毕业论文-凸轮机构建摸,受力分析和运动仿真与分析研究

摘要凸轮是一具有曲面轮廓的构件,一般多为原动件(有时为机架);当凸轮为原动件时,通常作等速连续转动或移动,而从动件则按预期输出特性要求作连续或间隙的往复运动、移动或平面复杂运动。
本文主要介绍凸轮的大体概念与凸轮廓线的设计计算,以及后期使用Pro/E软件仿真其廓线。
凸轮轮廓曲线是凸轮机构设计的关键,常用的设计方法有解析法和图解法。
本文将对这两这种方法进行大致分析与应用设计,利用Pro/E软件绘制凸轮机构实体模型,并用Pro/E软件自带的Pro/MECHANICA Motion插件设计凸轮机构运动模型,进行机构运动学仿真分析,可以较准确掌握机械产品零部件的位移、速度和加速度等动力学参数,进而可分析机构动作的可靠性。
主要技术要求为:熟悉凸轮设计基本原理及相关理论计算;凸轮机构运动仿真及受力分析;指定内容的翻译和Pro/E软件的熟练应用。
本文将重点研究凸轮机构建摸,受力分析和运动仿真与分析。
通过理论上的计算和研究,结合图解以及解析的方法,算出凸轮廓线的大致数据,用Pro/E软件将其绘制出,进行运动仿真,记录和研究其位移、速度和加速度等动力参数,最后分析出机构动作的可靠性。
使以后工作中,可以更准确掌握机械产品零部件的动力方面个参数,减少事故的发生,降低设计的难度。
关键词:凸轮;廓线设计;Pro/E;三维造型;仿真。
AbstractCam is a component with a surface profile is generally more dynamic pieces of the original (sometimes for the rack), when the cam piece to its original form, it is usually in a row for the constant rotation or move, and the follower output characteristics according to the requirements expected for continuous or reciprocating motion of the space, move, or the complexity of sports plane. This paper mainly introduces the general concept of the cam and cam profile design and calculation, and the latter the use of Pro / E software simulation of its profile.Cam cam curve design is the key to the design of methods commonly used analytical method and graphical method. In this paper, two such methods will be more or less analysis and application design, use of Pro/E software cam solid model rendering, and Pro / E software comes with the Pro/MECHANICA Motion cam plug design movement model, the kinematics Simulation can b a more accurate knowledge of machinery parts and components of displacement, velocity and acceleration, such as kinetic parameters, which can analyze the reliability of body movement.The main technical requirements are:familiar with the basic principles of cam design and related theoretical calculation; cam mechanism motion simulation and stress analysis; specify the contents of the translation and Pro/e application software proficiency.This article will focus on cam modeling, stress analysis and motion simulation and analysis. Through theoretical calculations and research, combined with graphical and analytical methods, calculate the approximate convex contour data, using Pro/E software to draw, simulation exercise, record and study the displacement, velocity and acceleration and other dynamic parameters, Finally, the reliability of the agency action. So after work, can be more accurate machinery parts and components of the dynamic parameters, to reduce accidents, reduce the difficulty of design.Keywords:Cam, Profile Design ,Pro/E, Three-dimensional shape,Simulation.目录1绪论 (1)1.1选题意义 (1)1.2 仿真技术的发展 (3)1.3 Pro/Engineer在机械制造中的应用 (5)1.3.1 Pro/Engineer软件介绍 (5)1.3.2Pro/E在我国机械行业中的应用 (8)2凸轮轮廓线的设计 (10)2.1绪论 (10)2.2 凸轮机构的分类 (11)2.2.1 按两活动构件之间的相对运动特性分类 (11)2.2.2 按从动件运动副元素形状分类 (11)2.2.3 按凸轮高副的锁合方式分类 (11)2.3从动件运动规律 (12)2.3.1 基本运动规律 (12)2.4 凸轮轮廓线的设计 (14)2.4.1凸轮轮廓曲线的计算 (14)2.5凸轮机构基本尺寸的确定 (17)2.5.1凸轮机构的压力角及许用值 (17)2.6.2凸轮理论轮廓的外凸部分。
凸轮机构设置偏置的原因

凸轮机构设置偏置的原因凸轮机构是一种常见的运动转换机构,广泛应用于各个领域中。
在凸轮机构的设计和制造过程中,一般会设置偏置。
这种偏置的设置是合理的,有着一定的原因和目的。
本文将从凸轮机构的工作原理、优缺点以及偏置设置的影响等方面进行探讨。
一、凸轮机构的工作原理凸轮机构是一种将旋转运动转化为直线运动或非等速直线运动的机构。
它是由一个旋转部件和一个运动部件组成的。
其中旋转部件一般为凸轮,运动部件则是通过凸轮的轴线与凸轮相连的滑块或随动杆等。
凸轮的外形通常是非圆形的,而是根据所需的运动特性来设计的。
当凸轮旋转时,滑块或随动杆等会在凸轮的摩擦作用下做直线运动或非等速直线运动。
这种运动特性可以通过凸轮的轮廓形状来实现,即通过改变凸轮轮廓的形状和偏置来控制凸轮机构的运动轨迹。
二、凸轮机构的优缺点凸轮机构具有以下的优点:1. 灵活性强:通过调整凸轮的形状和偏置,可以实现不同运动轨迹和不同运动规律的转换,适应多种工作要求。
2. 传动效率高:凸轮机构的传动效率通常较高,能够实现较高的运动传递速度和较大的工作负荷。
3. 结构简单:凸轮机构的结构相对简单,制造和维护成本较低,易于加工和组装。
然而,凸轮机构也存在一些缺点:1. 运动特性受限:凸轮机构的运动特性受限于凸轮轮廓的形状和偏置设置,难以实现复杂和多变的运动规律。
2. 摩擦损耗大:在运动过程中,凸轮和滑块或随动杆等之间会产生较大的摩擦力,从而造成能量损耗和磨损。
三、凸轮机构中设置偏置的原因1. 控制运动规律:通过设置凸轮的偏置,可以改变滑块或随动杆等的运动规律。
例如,在某些情况下,需要实现滑块的快速加速和减速运动,可以通过设置偏置来实现。
2. 起始位置调整:凸轮的偏置设置还可以用来调整凸轮机构的起始位置。
例如,在某些装置中,需要在每一次运动之前将滑块或随动杆等复位到特定的位置,以便下一次运动的开始。
3. 兼顾传动效率和工作负荷:在凸轮机构的设计中,需要兼顾传动效率和工作负荷。
凸轮从动件的摆线运动规律

凸轮从动件的摆线运动规律一、前言凸轮从动件是机械传动中常用的一种机构,它能够将旋转运动转化为直线运动或其他特定的运动形式。
而凸轮从动件的摆线运动规律则是研究凸轮从动件运动特性的重要内容之一。
本文将对凸轮从动件摆线运动规律进行详细介绍。
二、凸轮从动件的定义和分类1. 定义凸轮从动件是由一个固定在主轴上的凸轮和一个与之啮合并进行相对运动的摆线副组成的机构。
其中,凸轮为主要构件,它可以实现不同形式的曲线运动,而摆线副则负责将其转化为直线或其他特定形式的运动。
2. 分类根据不同的工作原理和结构形式,凸轮从动件可以分为以下四类:(1)滚柱式凸轮从动件:由一个圆柱体(即滚柱)和一个与之啮合并进行相对运动的摆杆组成。
该结构简单、制造容易,但受力不均衡。
(2)滚环式凸轮从动件:由一个内表面有齿或突起的环形轮和一个与之啮合并进行相对运动的摆杆组成。
该结构受力均衡,但制造较为复杂。
(3)滑块式凸轮从动件:由一个凸轮和一个与之啮合并进行相对运动的滑块组成。
该结构简单、制造容易,但摩擦大、磨损快。
(4)滚子式凸轮从动件:由一个内表面有齿或突起的圆柱体和一个与之啮合并进行相对运动的滚子组成。
该结构受力均衡,摩擦小、磨损慢,但制造较为复杂。
三、凸轮从动件的摆线运动规律1. 摆线曲线的定义摆线是一种特殊的曲线,它是由一个固定在圆周上的点沿着另一条直线(即基准直线)作匀速直线运动而形成的轨迹。
在凸轮从动件中,摆线副上的摆杆就是沿着一条基准直线作匀速直线运动,并通过啮合与凸轮上特定位置处的点相接触而形成摆线。
2. 摆线曲线方程摆线曲线的方程可以表示为:x = r(θ - sinθ)y = r(1 - cosθ)其中,r为摆线圆的半径,θ为圆周上的角度。
根据这个方程,我们可以通过给定的半径和角度计算出摆线上的任意一点坐标。
3. 摆线曲线特性(1)对称性:摆线曲线具有对称性,即以圆心为中心旋转180度后,得到的图形与原图形完全重合。
凸轮机构的组成与传动特点
凸轮机构的组成与传动特点1. 引言1.1 概述凸轮机构是一种常见的传动机构,由凸轮、摆杆(或滑块)和连接杆组成。
它应用广泛,在各个工业领域以及汽车发动机等领域都有重要的作用。
凸轮机构通过凸轮的不规则形状和运动规律,实现输入输出之间的转动和传递。
1.2 文章结构本文将围绕凸轮机构的组成和传动特点展开讨论,并且给出了应用领域与举例分析。
文章首先介绍了凸轮、摆杆(或滑块)和连接杆三个组成部分,然后详细探讨了凸轮机构的传动特点,包括输入输出关系与速度比例、运动规律和曲线形状以及转矩特性。
接下来,文章将聚焦于凸轮机构在工业领域、汽车发动机中以及其他领域的具体应用案例进行分析。
最后,文章总结观点并强调凸轮机构在未来的发展趋势与应用前景,并提出问题或争议供读者进行探讨。
1.3 目的本文旨在全面介绍凸轮机构的组成和传动特点,使读者对凸轮机构有一个清晰完整的了解。
通过分析凸轮机构在不同领域的应用案例,希望能够展示其广泛应用的实际价值并探讨未来发展趋势。
此外,本文还意在引发读者对凸轮机构相关问题的思考与讨论。
2. 凸轮机构的组成2.1 凸轮凸轮是凸轮机构中最关键的部件之一。
它通常由金属材料制成,具有特殊的外形设计。
凸轮的外轮廓一般被设计成非圆形,以便能够在运动过程中实现不同的加速度和速度变化。
这种设计可以通过激活其他部件来实现所需的传动或操作。
2.2 摆杆或滑块摆杆或滑块是凸轮机构中另一个重要组成部分。
它们通常通过连接到凸轮上的销或指针进行固定。
摆杆在运动过程中沿着固定点旋转,而滑块则在固定路径上前后运动。
摆杆和滑块的相对位置和运动方式取决于凸轮的形状和运动规律。
2.3 连接杆连接杆是将凸轮机构的输出传递给其他设备或系统的关键组件之一。
它通常由金属制成,可弯曲或伸缩以适应不同的传动距离和角度需求。
连接杆有助于将凸轮机构产生的直线运动转换为其他类型(例如旋转或往复)的运动。
以上是凸轮机构的主要组成部分。
凸轮、摆杆或滑块以及连接杆共同工作,使得凸轮机构能够实现所需的传动和操作功能。
凸轮机构谐综合运动特性的研究

1 常 规 凸 轮机 构 设 计 殛运 动 特 性 本 文 采 用 无 梭 织 机 开 口 凸 轮机 构 为 研 究 对 象 。 机 构 该 为摆 动 从 动 件 凸 轮 机 构 。经 实 测 , 机 构 一 阶 自振 频 率 该
维普资讯
第 2 卷 第 2期 1 2 02 正 0 3月
机 械 科 学 与 技 术
ME CHANI cAL S ENC AND CI E TECHNoLoGY
Vo . 1 No 2 1 2 . M ac 2 0 rh 02
15 1
如n 怒
0 1 ≤ ≤1 5
1 5≤ ≤ 1 5 1 2
( 一
£ + s雨t )】≤ ≤ 击m , 2 ] 5 t 2
2 0≤ ≤ 3 0 4 6
( 1)
() 可看 作 是周 期 为 2 的 周 期 函数 . 付 氏级 数 展 开 用
m
i t t 0
t fe tofN (he t r so r onis)a t e o iy)o t n m a i eror a e T h es t ay t ss hee f c t e m fha m c nd n(he v l ct n is kie tcp f m nc . e r ulsl heba i f rusng ha moni yn he e o d i a m e ha s . o i r c s t s st esgn c m c nim
机 构 为时 象 , 完 了谐 画数 项 数 Ⅳ 及 机 构 转 速 对 凸轮 机 构 运 动 特 性 的 移 响 ,L 为采 用 谐 综 台 方 法设 计 凸轮 机 构 研 ,而 '
提 供 7依 据
美
凸轮机构动力学

凸轮机构动力学1. 简介凸轮机构(Cam Mechanism)是一种常用于将旋转运动转换为直线运动的机械装置。
它由凸轮、摇杆和传动件组成。
凸轮机构在工程领域有广泛的应用,例如发动机的气门控制系统、机床的进给机构等。
凸轮机构动力学研究凸轮机构在运动过程中各部件的相对运动关系以及各部件的运动性能。
2. 凸轮的基本概念和种类2.1 凸轮的基本概念凸轮是凸轮机构中的核心部件,位于凸轮机构的旋转部分。
它通常是一个圆柱形的轮子,具有特定的轮廓曲线。
凸轮的轮廓曲线决定了凸轮机构的运动特性。
2.2 凸轮的种类根据凸轮的轮廓曲线形状,凸轮可以分为以下几种:•圆柱凸轮:轮廓曲线为圆柱面,通常用于简单的直线运动转换。
•轴对凸轮:轮廓曲线为二次曲线,可以实现较为复杂的运动。
•非圆轮廓凸轮:轮廓曲线为非圆形,可以实现特殊形状的运动。
3. 凸轮机构的动力学分析凸轮机构的动力学分析研究凸轮机构中各部件之间的运动关系以及力学性能。
3.1 凸轮与摇杆的运动关系凸轮通过轮廓曲线与摇杆接触,从而实现运动的传递。
凸轮的运动决定了摇杆的运动轨迹。
3.2 凸轮机构的运动学方程凸轮机构的运动学方程描述了凸轮机构中各部件之间的位置和速度关系。
通过求解运动学方程,可以确定凸轮机构在运动过程中的运动状态。
3.3 凸轮机构的力学分析凸轮机构的力学分析研究凸轮机构中各部件之间的力学关系。
例如,摇杆受到凸轮的作用力,凸轮受到传动件的作用力等。
4. 凸轮机构动力学的应用4.1 发动机气门控制系统凸轮机构在发动机气门控制系统中起着重要的作用。
通过凸轮机构,发动机可以控制气门的开闭时间和行程,从而实现燃烧室内气体的进出。
凸轮机构的动力学分析可以帮助优化发动机的气门控制系统,提高燃烧效率。
4.2 机床进给机构在机床的进给机构中,凸轮机构用于控制工件在加工时的运动轨迹和速度。
凸轮机构的动力学分析可以帮助优化机床的进给机构,提高加工效率和精度。
5. 总结凸轮机构动力学是研究凸轮机构运动特性和力学性能的重要领域。
机械设计3-2 分析盘形凸轮机构的运动特性
凸轮机构基本尺寸的确定
凸轮机构的压力角
1.概念: 接触点轮廓的法线方向与从动件速度方向间的夹角 1)α=900 , 变化的 2)F F1=Fcosα
F2=Fsin α α变大,F1变小, F2变大, Ff=F2f>F1自锁 ∴ α越小越好, αmax≤[α] 校核推程: 直动从动件 [α] =300~400 摆动从动件[α] =400~500 回程: [α] =700~800 3) αmax通常位于从动件位移线图的拐点处 画出凸轮与从动件在任意位置接触时,机构的压力角.
任务2 分析盘形凸轮机构的运动特性
凸轮轮廓曲线的设计
方法: 反转法 图解法设计凸轮轮廓曲线
•直动从动件盘形凸轮轮廓的设计
1.对心尖顶直动从动件 已知: 1)从动件的运动规律(s—δ) 2)凸轮转向: 顺时针 3)凸轮基圆半径rb
图解法设计凸轮轮廓曲线
• 滚子半径的确定
图解法设计凸轮轮廓曲线
偏置直动从动件凸轮机构
v 0—Vmax Vmax--0
分析:
o、m、e三处有“柔性冲击”,适合于中速 轻载场合
图解法设计凸轮轮廓曲线
•对心滚子直动从动件凸轮机构
已知: 1)从动件的运动规律(s—δ) 2) 凸轮转向: 顺时针 3)凸轮基圆半径rb 4)滚子半径rT
方法:将滚子中心作为尖顶按上述方法作出理论轮廓η,以理论轮廓 η上得一系列点为圆心,画出一系列半径为rt的滚子圆,这些滚 子圆的内包络线即为实际轮廓η′
1.等速运动规律—推程或回程时速度为常数
存在“刚性冲击”,适合低速轻载场合
s s(t) v v(t) a a(t)
1凸轮机构的工作原理和从动件的运动规律

分析从动件加 速度与凸轮轮 廓之间的关系
解释从动件加 速度变化对机 构运动的影响
总结从动件运 动规律加速度
特征的意义
从动件运动规律 的应用
在凸轮设计中的应用
确定从动件的运动 规律
选择合适的凸轮机 构类型
设计凸轮的轮廓曲 线
优化凸轮机构参数
在机械系统中的应用
凸轮机构广泛应 用于各种机械系 统中,如内燃机、 压缩机、印刷机 等。
优化方法:采用 新型材料、改进 设计参数、引入 智能控制技术等
实例分析:针对 具体凸轮机构, 分析其运动规律, 提出改进方案并 进行仿真验证
结论:优化后的 凸轮机构在传动 性能、稳定性及 可靠性等方面均 得到显著提升
运动规律的仿真与实验研究
仿真研究:通过计算机模拟技术, 对从动件的运动规律进行模拟分析, 预测其运动性能和优化方向。
从动件运动规律的选用
适用于低速轻载的从动件运动规律 适用于高速重载的从动件运动规律 适用于高精度要求的从动件运动规律 适用于低噪声低震动的从动件运动规律
从动件运动规律 的特性
运动规律的几何特征
运动规律的几何特征包括从动件在 凸轮推动下的位移、速度和加速度 变化。
速度变化则与从动件和凸轮的接触 点有关,该点在凸轮转动过程中的 速度决定了从动件的速度。
从动件的运动规律 可以实现精确的位 置控制和速度控制
在自动化生产线中 ,凸轮机构可以用 于实现工件的传送 、定位和装配等操 作
在机器人领域,凸轮机 构可以用于实现机器人 的手臂、手腕和手指等 关节的运动控制
从动件运动规律 的优化
运动规律的改进与优化
优化目标:提高 凸轮机构的传动 效率、减小振动 和噪声
从动件的常用运动规律
凸轮机构等速运动规律
凸轮机构等速运动规律一、引言凸轮机构作为一种常见的机械传动装置,被广泛应用于各种机械设备中。
凸轮机构的等速运动规律是研究凸轮机构运动特性的重要内容之一。
本文将介绍凸轮机构等速运动规律的基本原理和应用。
二、等速运动的定义和特点等速运动是指物体在单位时间内保持恒定的速度前进的运动方式。
在凸轮机构中,等速运动的特点有以下几点:1.物体的速度保持不变;2.物体在相同时间段内移动的距离相等;3.物体对应的位移随时间的增加而不断变化。
三、凸轮机构等速运动的原理凸轮机构的等速运动是基于凸轮的几何形状和运动原理实现的。
具体步骤如下:1.设计凸轮的轨迹,使得凸轮的运动符合等速运动的规律;2.将凸轮与其它机构相连,传递运动;3.通过选择合适的连杆和运动副,使得被传动物体保持等速运动。
四、凸轮机构等速运动的应用凸轮机构的等速运动在许多机械设备中都有广泛运用,下面是几个常见的应用案例:1.发动机气门控制系统发动机气门控制系统采用凸轮机构实现气门的开关控制。
凸轮的等速运动规律保证了发动机气门的准确控制和稳定运行。
2.纺织机械中的织布机构纺织机械中的织布机构利用凸轮机构实现织布过程中的等速运动,保证织布质量的稳定性和效率的提高。
3.瓶装生产线中的输送带机构瓶装生产线中的输送带机构利用凸轮机构实现瓶子的等速运动,保证瓶子在整个生产线上的稳定传送和准确定位。
五、总结凸轮机构的等速运动规律是一种常见且重要的机械运动方式。
通过设计凸轮的几何形状和运动规律,我们可以实现物体的等速运动,并应用于各种机械设备中。
凸轮机构的等速运动保证了机械设备的稳定性和效率,具有重要的应用价值。
凸轮机构的优缺点以及与其他运动装置的一些对比

凸轮机构的优缺点以及与其他运动装置的一些对比凸轮机构最大的优点是可实现高速化,结构紧凑,可靠性高;最大的缺点是不可变,不能变更动作时间(角度)一、关于凸轮动作与气缸动作的比较。
1、结构运动特性:凸轮机构结构紧凑,可靠性高,可以实现高速自动化。
在自动机械中,虽然也可以使用气动装置,但气动动作结束时冲击较大,当改变速度时,需要对节流阀进行调节,当生产速度提高较大时,气缸装置显然无能为力。
而用凸轮机构可以获得平稳的运动,当速度改变时也可以保持同步。
气压易受压力系统影响,当同一气源的其他气缸急速动作时,气压会下降,气缸的动作也会产生变化,而凸轮始终处于稳定状态。
2、运动的时序性:气缸的动作是一个接着一个的,必须是一个动作完成后才能进行下一个动作。
凸轮的位移(角度)与时间是确定的,动作是可以叠加的,一个动作未结束时可以开始下一动作,因此可以缩短循环时间。
3、故障率:设计良好的凸轮机构可以使用到设备的终生,气缸则无法达到此要求。
4、动作变化性:当需要变化动作的次序与时间时,显然凸轮机构无能为力。
凸轮机构一旦设计使用,基本上是不可改变的(除了有些设计成可调角度的凸轮勉强能调整一点角度外),是刚性的。
气动则不然,可以通过PLC进行调整,是柔性的。
5、能耗毫无疑问,凸轮的能耗要比气缸装置少,从能量的转换来说,气缸的能量是空气压缩机转换过来的,存在着转换损失和管道的严重泄露。
二、关于凸轮动作与伺服控制系统的比较不容置疑,伺服控制由于有强大的适应性与灵活性在当今占据着越来越重要的地位。
伺服控制可以摸拟运动曲线而获得很好的运动动力特性,很多优良的运动曲线也是应伺服需要而开发的。
与凸轮机构比较,主要差异是可变性与不变性。
前面说到,伺服具有强大的适应性与可变性,而凸轮机构的动作行程、同步和运动特性是不变的,无论负荷发生了多少的变化,其运动状态是不会发生变化的。
伺服机构通过伺服电动机进行数字控制实现运动控制,使用同一运动曲线的凸轮机构与伺服机构产生不同的运动动力效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J _e po
【 : — sn叩q y p i
() 1 3
、 。 J 为廓 线 离 D f 副低 代 简 化 成 曲柄 式 中 : 为轮 廓 线 上 任 意 离 散 点 的 坐标 ; 滑块 机 构 。由于 上 节 散点 曲率半径 ; 为廓线离散点法线的倾角。 我 们 得 到 了 典 型 的 四 杆 机 构 的 运 动 分
轮机 构运 动 特性 表 达式 。机 构 运动 特性 的分析 为机 构 后 续 的 动力 分析 和优化 设 计提 供 了参考 依据 。
[ 参考文献 ]
接 得 到 凸 轮 机 构 运
动 特性 。
如图 5 所示 ,设 滑 块 的位 移 以 曲柄 和 连杆 拉 直共
线 时 的位置 为 坐标原 点 。 滑块 的位 移 为 := ( - oO + ( - O ̄) 。 1 c s )b ] CS () 6
位置 : c sl 2oO+ 3oO= 4J 』 O也 c s2L cs3L o
Llo O+ c s 3 2o O s l 3o O c s 2 c }
速 度 : Ls O+ELs O+o sn 30} lln 1( 2i 2t正3iO= i J n 2
∞l l s I(正3 S 3W L C S 2 J L c O+ c C 8= 2 2O 0 o , O
(2 1)
ቤተ መጻሕፍቲ ባይዱ
似 ,唯一 不 同且需 要 说 明的 是 图 3为凸 轮轮 廓 的一 部 分
简化 得到 , 到 的关 系 式仅 为 全部 解 的一 部分 , 得 全部 解 应
如 凸轮 轮廓 线无 法 用参 数 方 程表 示则 可 以用 一组 离 散点
该 是 一个 由若 干个 轮廓 段关 系式 组成 的分 段 函数 。
式 中 : 曲柄 长度 ;一 6 连杆长 度 ; 曲柄转 角 ; 连杆转 角 。
析表达式 , 曲柄 滑块
:
所 以杆件 D, 的长度 Z ff : 、 c 为 、 ( ‰) / ( 、 (坷 ) ( / y + ) ) (
1) 4
机 构 是 四 杆 机 构 的
变 形 形 式 , 们 同样 我 可 以 得 到 它 的 运 动
Y
字木交 ; 赢
理论 , 研发 , 计 , 造 设 制
dt n 粤 =。si d +s_ t 6 掣 i
:
dt
() 7
因为
ai = s sn bi O
() 8
将式( ) 8 对时间求一阶导 , 得 =
将式 ( ) 9 和 = 带人 式 ( )可 得 7,
: 删
对于参数方程 xxO ,I( ) = ( )y ’ 表示 的凸轮轮廓线 , , 它 的曲率半径计算公式为 :
p :
'一 Y
速 比 : J ̄ 一 sn O+ 2/ s (2 ) o ol 1 ( l0)( i 0+ 3) J = i 3 n
与 上 面 所 述 的典 型 四 杆 机 构 的运 动 特 性 关 系 式 类
3 直动 从动件 凸轮机 构运 动特 性 的分 析方 法 由 图 4我 们 可 以 看 出 直 动 从 动 件 的 凸 轮 机 构 经 过 高
c,。 : 。 , …C 的坐标值来表示 ,而式 中的一阶和二阶导数 Cc
可分 别采 用 三次样 条插 值法 求 得 [ 4 J 。
对于廓线上任意一点的曲率 中心可采用下式求得 ,
Cs Od / +b
L [。 4] 2
c, () o 1 s 等] 1
显而易见 , 3 四杆机构与图 1 图 反 大致相 同, 按照上
述方 法求 其运 动特 性关 系式 :
矢 量关 系 式 : +J = 4 l,+ 3 2
从 式 ( )(0 、1 ) 6 、1 )( 1中可 以看 出 , 滑块 的位 移 、 度 、 速 加 速度 表达 式 中含有 两 个未 知 数 、 , 也 是 0 函数 卢 但 的 ( ( ), 0 ∞的 函数 , 式 8 )而 是 因此 上 述 表达 式 最 终 是 曲 柄 转 角 的函数 。 从 以上 分析 我 们可 以看 出 ,只要 知道 凸轮机 构 的 曲 率 中心 K就能 够将 机构 进行 化 简分 析 。
至此 所有 化 简所 需 条件 都 已经 求得 ,则 凸轮机 构 运 动特 性便 可得 到 。
4 结 语
特性 表 达 式 , 是 其 但
臣1 -
6
工n ,
、 .
运 动 形 式 与 四 杆 机
通过 以 上介 绍我 们 可 以得 到 凸轮机 构运 动 分析 的方
法如下 : 对于摆动从动件凸轮机构 , 首先将其廓形按半径
如果廓形复杂不能简单按半径分段 ,可用数值法进行离
散后 在进 行 分析 。对 于 直动 从 动件 凸轮 机 构若 凸 轮廓 形
图 5 曲柄 滑块 机 构 运 动 简 图
的运 动 特 性 , 而 间 从
能用具体表达式表达, 可按公式求 出曲率 中心, 若廓形复 杂可先将廓形进行离散 , 再按数值法求出曲率 中心, 通过 高副低代将机构化简为 曲柄滑块机构 ,从而间接得到凸
CO
() 9
( 0 1)
示坐 标 系 , o- ,、o 与 轴 夹角 分别 为 0、z 采用 设 i iz z 、i i。 。 ., 8O 上述 方 法分 析 时 , o 、o、, 设 i i i 0 2 0的矢 量 分别 为 L 、 、
3、
将式 (0对 时 间求一 阶导 数 , 滑块 的加 速度表 达 1) 可得 式: =d 删 一 d v t= [
进行 分段 , 逐段 化 简 为典 型 四杆机 构 , 通 过矩 阵 法得 到 并 运动 特性 关 系式 , 最后 将 各段 结果 组 合成 分 段 函数形 式 。
构 又有很大的不 同,
一
镡 B 、
_
一
、
很 难 直 接 应 用 式
( ,因 此 我 们 要 先 4)
分 析 曲 柄 滑 块 机 构