玻璃清洁机器人吸附机构设计8035863
玻璃清洗机器人的设计论文

玻璃清洗机器的设计The design of glass curtain wall cleaningmachine摘要:本文介绍了一种多吸盘组交替吸附工作、本体框架式移动并附带高效清洗装置的壁面清洁机器人系统,具体阐述了各组成部分的结构和工作原理,并通过实验对爬壁清洗机器人在玻璃壁面上的行走适应情况以及壁面清洗效果进行了探究。
该爬壁清洗机器人具有体积小、重量轻、控制方便、清洗效果好等优点,有较强的市场推广价值。
【Abstract】:In this paper, a more alternate adsorption suction cup group work, ontology frame type mobile with efficient cleaning device of wall cleaning robot system, elaborates on the structure and working principle of each component, and through the experiment of climbing on the glass wall cleaning robot walking to adapt to the situation and to explore the effect of cleaning. The climbing wall cleaning robot has small volume, light weight, easy to control, cleaning effect is good wait for an advantage, have stronger marketing value关键词:真空吸附;爬壁机器人;清洗Key words: vacuum adsorption; Climbing robot; cleaning引言:目前玻璃幕墙作为高楼外防护结构的现象越来越普遍,为了保证玻璃外观的整洁美丽,就需要定期对玻璃表面进行清洗,而大部分玻璃幕墙采用人工清洗作业。
高层玻璃幕墙清洗机器人机械部分设计
1 绪论1.1 高层玻璃幕墙清洗机器人研发意义随着人口规模的不断扩大,城市高层建筑越来越多。
摩天大楼逐渐成为生活中常见的一景。
由于玻璃具有采光性好、保温性好、防潮性好等诸多优点,同时,由于彩色玻璃美观大方,所以越来越多的高层建筑选择了用玻璃幕墙。
目前,我国大部分玻璃幕墙的清洗都需要依靠“蜘蛛人”来完成,但是,这种高空作业有一定的危险性。
因此,需要一个能够代替人力完成清洗任务的机器人。
1.2 高层玻璃幕墙清洗机器人研究现状及分析1.2.1国外玻璃幕墙清洗机器人研究现状德国相关公司委托制作的“SKYWAH”是这个星球上第一个能够成功制作出来的清洗机器人。
这个庞大的机器人主要结构是个多关节巨型伸缩臂,能够在距离33米的地方完成工作。
所有的轴采用抗拉钢材并采用液压驱动,所以结构重量较轻。
这一款清洗机器装置安装在四轮驱动的汽车相关底盘上,清洗刷较长,定位精度高。
该机器人可以在人的监视下完成清洗工作,动作灵活。
与我们一衣带水的邻国——日本,他们的机器人公司之一——BE公司研制过一款轨道已经固定好的的专门用于擦玻璃的机器人,依据安装在楼顶的轨道和相关的提升系统,清洗机可以准确地对准窗户。
该设备优点是自动化程度相对较高。
但是,一般建筑在设计之初不会将擦窗系统考虑其中,使该机构适用性大大降低。
图自动清洗机-1图21-1SKYWAH德国玛歌堡的费劳恩霍费尔相关的研究所是德意志共和国主要的生产和自动化中心,它们在过去的这些年,曾经较为成功地研究了一系列清洗机器人。
该机器人可横向、可纵向,随心所欲完成清洗任务。
德国佛拉货福尔研究所研制了一种名为SIRIUSC的清洗机器人。
在那些要清洗的相关建筑物上,我们放在了上面一辆跟随及其运动的小车,这辆小车不紧急今年能够起到定位的作用,而且还能对装置起到安全保护的作用。
机器人坐竖直运动,左右移动依靠小车来完成。
美国航空航天宇航局下属的机器人公司,在上个世纪研制了爬壁机器人“Sky Washer”(用于清洗摩天大楼),它重大约四十斤,该机器人利用两组框架(L型)进行相对滑动,交替吸附来实现机器人的移动。
玻璃外墙自动清洁机器人(验证机)_本科毕业设计论文

本科毕业论文(设计)题目:玻璃外墙自动清洁机器人(验证机)学院:物理与电子科学学院专业:电子信息科学与技术诚信承诺我谨在此承诺:本人所写的毕业论文《玻璃外墙自动清洁机器人(验证机)》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):2013 年 4 月20 日玻璃外墙自动清洁机器人(验证机)摘要:本文主要介绍了玻璃外墙自动清洁机器人的设计背景、设计思路、制作过程、工作原理、验证过程以及使用方向。
由于限于实验室条件以及对设计思路可行性的不确定性,所以决定先做一个验证机,即验证方案的可行性和对后期产品的设计提供方案。
玻璃外墙机器人在制造过程中主要使用了以下器件和材料,方管铝合金,自攻螺丝钉,铝板,DC5V步进电机,超大吸盘,微型抽气机,8mm丝杆,5mm空气导管,无线模块,5V直流电源模块,74HC595以及单片机。
玻璃外墙机器人主要是由铝合金搭建主框架,这样可以在不降低机器人强度的情况下减轻重量。
机器人铝合金结合部以铝片加自攻螺丝钉加固,运动部分使用8mm丝杆加齿轮以控制运动,动力则采用DC5V步进电机的转动带动机器人运转,在工作时,以微型抽气机抽出超大吸盘内的空气以使机器人吸在玻璃墙幕上,整个机器人使用51单片机来控制驱动,使用74HC595对单片机的I/O口进行扩展,机器人用220V交流电转5V直流电源模块供电,以确保步进电机能达到额定电流,提供强劲的动力,再用无线模块控制机器人的状态,使得机器人稳定有序的工作。
可以适合全玻璃结构的建筑体以及建筑中部分的玻璃墙面的清洁工作,它可以在无人干预的情况下完成指定玻璃墙面的清洁,替代传统的人工室外清理,。
使用玻璃外墙自动清洁机器人可以最大化的降低人的危险和劳动强度,提高工作效率,降低成本。
它还具有越障功能,对于有起伏有其他装饰材料的玻璃墙幕同样适合,同时它还能转弯,不光能垂直上下,还能向左向右移动真正做到清洁无死角。
高层玻璃幕墙清扫机器人机械部分设计

高层玻璃幕墙清扫机器人机械部分设计简介本文档旨在描述高层玻璃幕墙清扫机器人的机械部分设计。
该机器人旨在提供一种自动化的清洁解决方案,用于清扫高层建筑的玻璃幕墙表面。
设计要求1. 结构稳定性:机器人的机械结构应具备足够的稳定性,以确保在高层建筑表面操作时不会发生意外。
2. 清洁效果:机器人的设计应能够有效地清洁玻璃幕墙表面,确保清洁效果达到预期。
3. 安全性:机器人设计应考虑到操作人员和周围环境的安全性,防止意外事故的发生。
4. 可靠性:机器人的机械部分应具备足够的可靠性,以确保长时间连续运行而无需频繁维修。
机械设计方案1. 结构设计- 机器人采用轮式移动结构,以确保在玻璃幕墙表面灵活移动。
- 主要结构材料选用高强度合金材料,以提供足够的结构稳定性和耐久性。
2. 清洁装置设计- 清洁装置采用可调节压力的喷水系统,以确保在不同情况下可选择适当的清洁压力。
- 清洁装置具备自动水量控制功能,避免浪费水资源。
- 配备可更换的清洁刷头,以适应不同类型的污垢和玻璃表面。
3. 安全设计- 机器人配备多重传感器系统,用于探测周围环境并避免与障碍物碰撞。
- 设计紧急停止按钮,以便在发生紧急情况时迅速停止机器人运行。
- 紧急疏散系统的设计,用于安全疏散操作人员。
4. 可靠性设计- 机器人配备电池和供电管理系统,以确保能够持续进行长时间的清洁操作。
- 机械部分采用模块化设计,方便更换和维修损坏或老化的部件。
结论高层玻璃幕墙清扫机器人的机械部分设计考虑了结构稳定性、清洁效果、安全性和可靠性等要求。
采用了轮式移动结构、可调节压力的喷水系统、多重传感器系统等设计方案,以提供一个自动化、高效、安全、可靠的清洁解决方案。
这将有助于提高高层玻璃幕墙清洁工作的效率和安全性。
玻璃清洁机器人结构设计--壁面清洗机器人说明书
玻璃清洁机器人结构设计摘要本文首先对玻璃清洁机器人这个课题的来源、目的及意义进行了阐述,简单介绍了国内外玻璃清洁机器人的发展情况,对玻璃清洁机器人的几种不同的移动方式及吸附方式进行了比较,最后采用了多吸盘的框架式结构,具有结构简单、操作方便等优点。
接着对玻璃清洁机器人的总体方案进行了设计,设计了行走机构以及转向机构,通过平动气缸与腿部气缸来实现机器人的移动,并且通过对玻璃吸附可靠性的分析选择了吸盘、吸盘支座及快拧接头等部件,还对其它的气动元件进行了选型,并且绘制了气压系统图。
关键词:玻璃清洁机器人; 多吸盘的框架式结构; 行走机构; 转向机构;ABSTRACTThis paper on the glass cleaning robot source, purpose and significance of the topic, introduces the development situation of glass cleaning robots at home and abroad, several different mobile ways of glass cleaning robot and adsorption methods were compared, and finally adopted more suction cup frame type structure, has the advantages of simple structure, convenient operation. Then for glass cleaning robot design, the overall scheme of the walking mechanism and steering mechanism design, through the translation of cylinder and the leg cylinder to realize the movement of the robot, and through the analysis of the surface adsorption reliability choose chuck, chuck support and quick screw connector components, such as also for other pneumatic components selection, and map the pneumatic system.Keywords: glass cleaning robot; Suction cup frame type structure; Walking agencies; Steering mechanism;目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 爬壁机器人 (1)1.2 课题的目的与意义 (2)1.3 国内外玻璃清洁机器人的研究现状 (2)1.4 课题主要内容及技术参数 (4)1.5 本章小结 (4)2 玻璃清洁机器人的方案确认 (5)2.1 玻璃清洁机器人的组成 (5)2.2 玻璃清洁机器人的方案确认 (6)2.3 本章小结 (6)3 玻璃清洁机器人的总体设计 (7)3.1 行走机构的设计 (7)3.1.1 平动气缸的设计与校核 (7)3.1.2腿部气缸的设计与校核 (12)3.3 转向机构的设计 (14)3.2.1 步进电机的选型 (14)3.2.2 蜗轮蜗杆的设计与校核 (15)3.3 吸附装置的选取 (18)3.3.1 吸附可靠性分析 (18)3.3.2 吸附装置的选取 (20)3.4 玻璃清洁机器人的框架以及吸盘安装板的设计 (22)3.4.1 下框架的设计 (23)3.4.2 上框架的设计 (23)3.4.3 中间旋转板的设计 (24)3.4.4 吸盘安装板的设计 (24)3.5 控制阀及其它气动元件的选取 (25)3.5.1气源处理组件的选取 (25)3.5.2 方向控制阀的选取 (25)3.5.3 单向节流阀的选取 (26)3.5.4 真空安全阀的选取 (27)3.5.5 分气块的选取 (27)3.5.6 气电压力转换器的选取 (27)3.5.7 真空发生器的选取 (28)3.6气动原理图的设计 (28)3.7 本章小结 (29)结论 (30)参考文献 (31)致谢 (32)1 绪论1.1 爬壁机器人捷克的剧作家卡雷尔·凯培尔最先提出了机器人这个词语,体现出了人类想要创造出一种能够模仿人的行动的机器,从而能代替人类去进行不同的工作的一种长久的愿望。
玻璃清洁机器人吸附机构设计含全套说明书和CAD图纸
题目:玻璃清洁机器人吸附机构设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,提出了分层次规划的体系结构。
在此基础上,对机器人总体结构进行了设计分析,并应用有关计算理论和计算软件进行了主要参数设计和关键部件的结构设计,讨论了机器人的作业路径,运动控制规划及吸附机构的设计,最后,应用Pro/ENG三维软件针对所设计的机器人建立了三维实体模型。
关键词:玻璃幕墙清洗,机器人,运动分析ABSTRACTGlass-wallcleaning robot isone of robotfor l imited operation,whichcan walk on Vertical glass-wall with washing devices.It is arobot with specific applied functions,Based on wall-climbing robot techniques.forspecific objects.And it works on vertical Glass-wall,whereis dangerousfor human beings.It isa robot could conquer the gravity effect and carry cleaningequipments,facing to glass-wall surface beautifying service of modern high-rise buildings.Firstly, the whole frame ofthe glass wall cleaning robot is introduced, and theLevel-based planning is discussed also. Based on this, th edesigning and analyzing Ofthe structure of the robot are described in details,the main parameters designing and structure designing of the key parts are also processed by using some of correlative calculating theories andsoft .Then,mission-orientedand localmotion planningare discussed.At last,three-dimensional model of the robot are established byMeans ofPro/ENGINEER,soft.Key words:Glass-wallcleaning robotvacuum adsorption system目录摘要2ﻩABSTRACT ................................................ 21前言. (3)2机器人总体方案规划 (4)2.1 机器人设计思想 (4)2.2外形尺寸选择6ﻩ3 吸附机构.............................................. 63.1吸附方式 (6)3.1.1吸附方式选择7ﻩ3.1.2吸盘结构简图7ﻩ3.1.3机器人控制原理图8ﻩ3.2吸附力分析 (9)3.2.1 材料选择9ﻩ3.2.2吸附力计算10ﻩ3.2.3系统抗倾覆计算........................... 103.3其他机构的选择11ﻩ3.3.1射流器选择11ﻩ3.3.2水泵和水管的选择........................ 123.3.3密封机构 (12)4 总结14ﻩ参考文献 (15)致谢16ﻩ1前言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
玻璃清洁机器人吸附机构设计
对壁面要求高,壁面有凹凸或裂缝时将会有泄露
吸盘尺寸小,机器人更加灵活
推力吸附
风机噪声大啊,机器人重量大,体积大
对壁面适应性强,不存在泄露问题
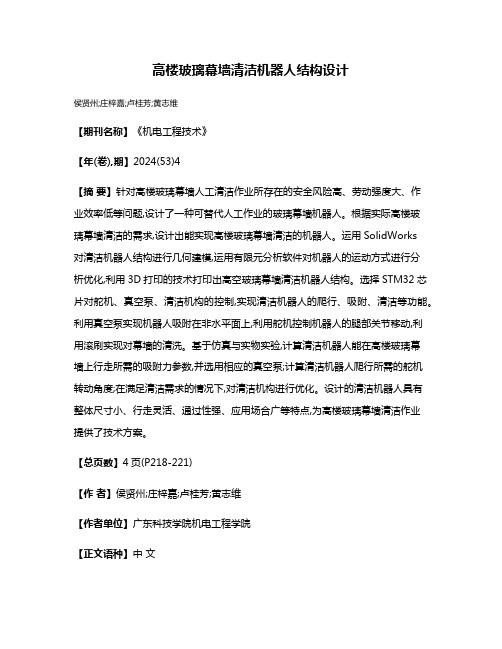
图1.1是清华大学采用电磁体吸附方式研制的用于储罐表面检测的磁吸附机器人TH-Climber-I[5],行走方式为履带驱动机器人在储罐表面行走检测。实验表明,它具有较高的运动速率、具有很好稳定性和定位精度,其运动速率最大可达8m/min,可以跨越10mm以上的焊缝和表面凸起障碍,角度误差也可控制在0.2度以内。图1.2为加拿大戴尔豪斯大学和香港中文大学研制的壁面移动机器人[6],它的吸附装置使用永磁体吸附履带。使用永磁体方式使机器人吸附于储罐表面,然后电机驱动履带带动机器人在储罐表面移动检测。
Key words:Glass-wall cleaning robot; Combined suction method; Propeller type axial flow fan
目录
第一章引言
1.1课题研究的背景及意义1
1.2国内外对玻璃清洁机器人吸附方式的研究概况1
1.3吸附方式的发展趋势3
1.3.1吸附方式将更多地采用仿生技术4
关键词:玻璃清洁机器人复合吸附方式螺旋桨式轴流风机
Abstract
Glass-curtain-wall-cleaning robot is a wall climbing robot with special functions, with is a branch of special robot. It not only can be used for cleaning the outer surface of the curtain wall of high-rise buildings, can also be used for surface cleaning and checking of special circumstances and special objects. It is a practical robot based on technology of the wall-climbing robot and having a clear function for specific research and development of the robot. Its main function is to overcome the effects of gravity on their own with cleaning equipment for cleaning in the glass-curtain wall-cleaning surface of high-rise buildings so that it can free people from dangers of aerial working environment, thus avoiding accidents,improving the efficiency of cleaning and saving costs. It has a considerable market prospect.
高楼玻璃幕墙清洁机器人结构设计
高楼玻璃幕墙清洁机器人结构设计侯贤州;庄梓嘉;卢桂芳;黄志维【期刊名称】《机电工程技术》【年(卷),期】2024(53)4【摘要】针对高楼玻璃幕墙人工清洁作业所存在的安全风险高、劳动强度大、作业效率低等问题,设计了一种可替代人工作业的玻璃幕墙机器人。
根据实际高楼玻璃幕墙清洁的需求,设计出能实现高楼玻璃幕墙清洁的机器人。
运用SolidWorks对清洁机器人结构进行几何建模,运用有限元分析软件对机器人的运动方式进行分析优化,利用3D打印的技术打印出高空玻璃幕墙清洁机器人结构。
选择STM32芯片对舵机、真空泵、清洁机构的控制,实现清洁机器人的爬行、吸附、清洁等功能。
利用真空泵实现机器人吸附在非水平面上,利用舵机控制机器人的腿部关节移动,利用滚刷实现对幕墙的清洗。
基于仿真与实物实验,计算清洁机器人能在高楼玻璃幕墙上行走所需的吸附力参数,并选用相应的真空泵;计算清洁机器人爬行所需的舵机转动角度;在满足清洁需求的情况下,对清洁机构进行优化。
设计的清洁机器人具有整体尺寸小、行走灵活、通过性强、应用场合广等特点,为高楼玻璃幕墙清洁作业提供了技术方案。
【总页数】4页(P218-221)【作者】侯贤州;庄梓嘉;卢桂芳;黄志维【作者单位】广东科技学院机电工程学院【正文语种】中文【中图分类】TP242【相关文献】1.高楼玻璃幕墙清洗机器人作业系统的研究2.玻璃幕墙清洁机器人的结构设计3.应运而生的玻璃幕墙【清洁机器人】——谈玻璃幕墙清洁自动化4.国内首次机器人爬玻璃幕墙为高楼“体检”在厦门展示因版权原因,仅展示原文概要,查看原文内容请购买。
基于注射器吸附的玻璃幕墙清洗机器人设计
基于注射器吸附的玻璃幕墙清洗机器人设计梁子跃;蔡强;杨昊;黄灿灿【摘要】为解决玻璃幕墙人工清洗工作量大,危险性高的问题,设计了这一玻璃幕墙清洗机器人.系统以STC12C5A60S2单片机为主控制器,通过控制42HS4817A4型号步进电机带动微型直线滑台,实现机器人玻璃面上下机械运动,最大运行速度约60 mm/s,采用12 V减速直流电机,5 V马达,20 mL量程注射器,PJYS40-15-N型号真空吸盘的组合,实现机器人脚吸附和脱离玻璃面,多次试验,稳定吸附结果高达95%以上.采用PT2262和PT2272无线发射接收器,实现无线遥控操作.试验结果表明,该系统制作成本低,轻量化设计灵活性好,具有一定的实用价值.%A glass curtain wall cleaning robot is designed for the reason of large workload and high risk of glass curtain wall cleaning. The system is based on theSTC12C5A60S2 MCU controller,which achieves up and down movement of glass surface by controlling the 42HS4817A4 type stepper motor driven miniature linear slide. The maximum operating speed of it is 60 mm/s. And using 12 V reduction DC motor,medical syringe,PJYS40-15-N vacuum suction cup of effective cooperation to realize the goal that the robot feet adsorption and detachment of the glass surface. Multiple tests,to get the results of stable adsorption up to 95%. Using PT2262 and PT2272 wireless transmitter receiver to realize the wireless remote control operation. The experimental results show that the system has the advantages of low cost,light weight and good flexibility. Thus it has certain practical value.【期刊名称】《电子器件》【年(卷),期】2018(041)001【总页数】5页(P274-278)【关键词】玻璃幕墙清洗机器人;真空吸附原理;注射器;电机组;无线通信【作者】梁子跃;蔡强;杨昊;黄灿灿【作者单位】中国计量大学,杭州310018;浙江清华长三角研究院,浙江嘉兴314006;浙江清华长三角研究院,浙江嘉兴314006;中国计量大学,杭州310018;浙江清华长三角研究院,浙江嘉兴314006【正文语种】中文【中图分类】TP242.3由于玻璃采光及保温防潮性能较好,因此玻璃幕墙得到广泛应用[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
玻璃清洁机器人吸附机构设计8035863毕业论文(设计)玻璃清洁机器人吸附机构设计论文外文题目:玻璃清洁机器人吸附机构设计论文主题词:玻璃清洁机器人复合吸附方式螺旋桨式轴流风机外文主题词:lass-wall cleaning robot Combined suction method Propeller type axial flow fan论文答辩日期:答辩委员会主席:评阅教师:原创性声明本人呈交的学位论文,是在导师的指导下,独立进行研究工作所取得的成果,所有数据、图片资料真实可靠。
尽我所知,除文中已经注明引用的内容外,本学位论文的研究成果不包含他人享有著作权的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确的方式标明。
本学位论文的知识产权归属于培养单位。
本人签名:日期:摘要玻璃幕墙清洁机器人是具有特定功能的壁面移动机器人,是特种机器人的一个分支。
它不仅可以用于高层建筑外表面幕墙的清洗,还可用于特殊环境或者特殊设备的表面清洗以及检查。
它是基于壁面移动机器人技术,并针对具体的作业对象研发具有明确功能的实用型机器人。
其主要工作在高层建筑的玻璃幕墙表面,克服重力对自身的作用,携带清洗作业设备对建筑物玻璃幕墙表面进行清洗,从而将人们从危险的高空作业环境中解脱出来,不仅可以避免发生意外事故,而且可以提高清洗效率、节约成本,具有可观的市场前景。
本文将在分析玻璃清洁机器人常见的吸附方式,以及国内外对玻璃清洁机器人所开发的新型吸附方式后,提出采用螺旋桨式轴流风机产生负压作为作为吸附方式的经济适用型吸附机构。
在对机器人整体设计方案进行介绍,提出模块化的组装结构。
在这基础上,对机器人的吸附机构进行设计分析,然后应用相关理论和设计软件进行参数设计和部件的结构设计,验证吸附机构。
最后利用Pro/ENGINEER创建出所设计的玻璃清洁机器人吸附机构三维实体模型以及机器人整体模型。
关键词:玻璃清洁机器人复合吸附方式螺旋桨式轴流风机AbstractGlass-curtain-wall-cleaning robot is a wall climbing robot with special functions, with is a branch of special robot. It not only can be used for cleaning the outer surface of the curtain wall of high-rise buildings, can also be used for surface cleaning and checking of special circumstances and special objects. It is a practical robot based on technology of the wall-climbing robot and having a clear function for specific research and development of the robot. Its main function is to overcome the effects of gravity on their own with cleaning equipment for cleaning in the glass-curtain wall-cleaning surface of high-rise buildings so that it can free people from dangers of aerial working environment, thus avoiding accidents, improving the efficiency of cleaning and saving costs. It has a considerable market prospect.In this paper, analysis of glass cleaning robots popular method of adsorption, as well as adsorption to glass cleaning robots developed by the new approach, using propeller-type axial-flow fan to create negative pressure as the economic application of adsorption mechanism of adsorption.Describes the overall design of the robot, presented modular assembling structures. On this basis, the adsorption mechanism and the design of the robot, and then apply the relevant theory and design structure design of software for design and components, verify the adsorption mechanism. Final application of Pro/engineer to design the robot building solid model.Key words: Glass-wall cleaning robot; Combined suction method; Propeller type axial flow fan目录第一章引言1.1 课题研究的背景及意义 (1)1.2 国内外对玻璃清洁机器人吸附方式的研究概况 (1)1.3 吸附方式的发展趋势 (3)1.3.1 吸附方式将更多地采用仿生技术 (4)1.3.2 向适应微小型化机器人发展 (4)1.4 小结 (5)第二章玻璃清洁机器人总体规划2.1 吸附机构 (6)2.2 清洁结构 (8)2.3 行走机构 (8)2.4 水电供应系统 (9)2.5 小结 (10)第三章吸附机构结构设计3.1 吸附原理 (11)3.2 吸附方式的实现 (12)3.2.1 风机推力 (12)3.2.2 负压的产生 (14)3.3.3 真空腔的负压与叶片推力可合成 (15)3.3 小结 (17)第四章模型建设与仿真验证4.1 GAMBIT几何造型建模图 (18)4.2 仿真验证 (19)4.3 详细结构方案 (22)4.4 小结 (23)结束语 (24)致谢 (25)参考文献 (26)附录 (27)第一章引言1.1 课题研究的背景及意义玻璃清洁机器人是拥有特殊功能的壁面移动机器人,是可以在垂直和倾斜的玻璃表面上进行清洗作业的特种机器人[1]。
作为一种可在高空极限环境下工作的自动化机械装置,它的发展现在越来越受到人们的关注。
而吸附装置是玻璃清洁机器人包括移动装置、清洁装置、控制装置在内的核心装置,玻璃清洁机器人性能的优异直接取决于机器人吸附装置性能的优异。
玻璃清洁机器人吸附机构的研究,有两个问题必须要妥善处理好:一是如何稳当地吸附于玻璃表面;二是使机器人吸附在玻璃表面的同时又不影响机器人在玻璃表面上移动。
玻璃清洁机器人要想具备有良好的移动能力就得损失一定的吸附能力,但是当吸附装置提供的吸附力过强又会给机器人在玻璃表面的移动带来困难,所以机器人在玻璃表面上的吸附与移动这是个自身矛盾的问题。
就是优化吸附和移动的关系,既要求吸附装置的研究设计方案在保证玻璃清洁机器人吸附装置为机器人提供足够的吸附力的同时,又不影响机器人在玻璃表面面的移动能力[2]。
因此国内外的许多科研机构在设计壁面移动机器人时,都在对这问题展开相关的探讨和研究。
1.2 国内外对玻璃清洁机器人吸附方式的研究概况通过按吸附方式的不同,可将玻璃幕墙清洁机器人的吸附机构分为三种,即磁吸附、真空吸附和推力吸附[3]。
其中磁吸附按提供吸附力材质的不同,可分为电磁体和永磁体两种。
对壁面的平整程度都没有要求,不仅机器人的有效载荷远胜于真空吸附和推力吸附,而且在作业过程中不存在真空漏气的问题,但要求机器人工作时所吸附的壁面必须是导磁材料,这一点使得采用磁吸附作为吸附方式的机器人的应用环境收到严重地限制;真空吸附按吸盘个数又分为单吸盘和多吸盘两种,真空吸附虽然不受壁面材料限制但对吸盘的密封性能却要求较高,在附着面不平整时吸盘容易漏气,使密封性能下降从而造成吸附力下降,使得机器人的实际承载能力降低;推力吸附方式整合了前两者的优点,有一定的吸附力而且对壁面的平整程度没有要求,但是由于要求风机排风量很大所以整体重量会很重。
各种方式优缺点如下表1.1[4]。
表1.1 玻璃清洁机器人吸附方式的比较图 1.1 是清华大学采用电磁体吸附方式研制的用于储罐表面检测的磁吸附机器人TH-Climber-I [5],行走方式为履带驱动机器人在储罐表面行走检测。
实验表明,它具有较高的运动速率、具有很好稳定性和定位精度,其运动速率最大可达8m/min ,可以跨越10mm 以上的焊缝和表面凸起障碍,角度误差也可控制在0.2度以内。
图1.2 为加拿大戴尔豪斯大学和香港中文大学研制的壁面移动机器人[6],它的吸附装置使用永磁体吸附履带。
使用永磁体方式使机器人吸附于储罐表面,然后电机驱动履带带动机器人在储罐表面移动检测。
图1.1 清华大学磁吸附图1.2 戴尔豪斯大学和香港中文大学的机器人 TH-Climber-I 永磁体吸附履带壁面移动机器人[7]图1.3 是年哈尔滨工业大学研制的CLR-II型壁面清洗壁面移动机器人[8],它的吸附机构采用的就是单吸盘真空吸附,清洗装置悬挂于机器人下方。
机器人有效载荷为5kg,爬行速率最快为10m/min,每次爬行高度是最高100m,操控方式是有线遥控及PLC线路控制,行走方式采用双轮式无级调速,机器自身携带有高压水枪、旋转刷从而在清洗作业时可实现机器人自主清洗作业。
由于它是专为建筑物外表面瓷砖壁面的清洗而设计制造的,所以目前已有成品并投入生产应用。
图1.4 是在1990-1993日本东京工业大学间研究设计的NINJA[9],第一代型号为NINJIA-I,自1994年开始,NINJA-II在NINJIA-I的基础上不断的改善升级,可用于高楼壁面的检查等。
NINJIA-I和NINJA-II的主要技术参考是相同,吸附装置也都采用的多吸盘真空吸附。
图1.3 哈尔滨工业大学研制的CLR-II 图1.4 日本东京工业大学研制的NINJIA 1990年西亮教授研制的爬壁机器人的吸附装置采用的是推力吸附,如图1.5 为理论设计图。