SIFT算法详解及应用(课件)
sift算法讲解 ppt课件
1 35 79
降采样
123 455 45 67 88
7 8 9 10 11 11
10 11 12 13 14 14 13 14 15 16 17 17 13 14 15 16 17 17
1 35 79
降采样
123 455 45 67 88 7 8 9 10 11 11 10 11 12 13 14 14 13 14 15 16 17 17 13 14 15 16 17 17
一个关键点可能会被指定具有多个方向(一个主 方向、一个以上辅方向),可以增强匹配的鲁棒 性。
每个关键点有三个信息:位置,所处尺度,方向。 由此可以确定一个SIFT特征区域。
SIFT 概述
关键点检测
1、检测尺度空间极值点
2、精确定位极值点
描述子生成
3、为每个关键点指定方向
4、关键点描述子的生成
1、首先将坐标轴旋转为关键点的方向,以确保旋转不 变性。
放大一倍
13 5 7 9 11 13 15 17
123 45
4
6
8
7 8 9 10 11
10
12
14
13 14 15 16 17
放大一倍
13 5 7 9 11 13 15 17
123 45 45 67 8 7 8 9 10 11 10 11 12 13 14 13 14 15 16 17
放大一倍
1 35 7 9 11 13 15 17
在3x3x3 邻域内选择所有的极值 中间的检测点和尺度空间共26个点比较
SIFT 概述
关键点检测
1、检测尺度空间极值点。
2、精确定位极值点。
描述子生成
3、为每个关键点指定方向。
图像识别中的SIFT算法实现与优化

图像识别中的SIFT算法实现与优化一、SIFT算法介绍SIFT算法(Scale-Invariant Feature Transform)是一种用于图像对比和匹配的局部特征提取算法,由David Lowe于1999年开发提出并持续改良。
SIFT算法可以检测出具有旋转、缩放、光照变化等不变性的图像特征点,被广泛应用于计算机视觉领域,如图像匹配、图像检索、物体识别等。
SIFT算法主要分为四步:尺度空间极值检测、关键点定位、关键点方向确定和描述子生成。
尺度空间极值检测:SIFT算法通过构建高斯金字塔来检测尺度下的极值点。
在高斯金字塔中,首先对原始图像进行下采样,生成一组不同尺度的图像。
然后在每个尺度上利用高斯差分来检测极值点,满足以下条件的点即为极值点:周围像素点中的最大值或最小值与当前像素点的差值达到一定阈值,而且是在尺度空间上达到极值。
关键点定位:对于极值点的定位,SIFT算法采用了一种基于拟合精细的方法来定位真实的关键点。
SIFT算法通过在尺度空间中计算极值点的DoG(高斯差分)的Hessian矩阵,来估计关键点的尺度和位置。
如果Hessian矩阵的行列式和迹符号都满足一定的条件,则认为该点为关键点。
关键点方向确定:在确定关键点的位置和尺度之后,SIFT算法还需要确定关键点的主方向。
该方向是通过计算关键点周围像素点的梯度方向和大小,并在组合后的梯度图像上寻找最大梯度方向得到的。
这个方向是在许多方向中确定的,而描述符是相对于主方向定义的。
描述子生成:最后,SIFT算法采用一个高维向量来描述关键点,并且具有不变性。
该向量的计算是在相对于关键点的周围图像区域内,采集图像梯度方向的统计信息来完成的。
描述符向量包含了关键点的位置、主方向,以及相对于主方向的相对性质。
二、SIFT算法优化思路尽管SIFT算法已经被广泛使用,但是由于算法复杂度和内存消耗等问题,使得在大数据和实时应用场景下,SIFT算法的运行速度和效果表现都有巨大限制。
(完整版)SIFT算法原理
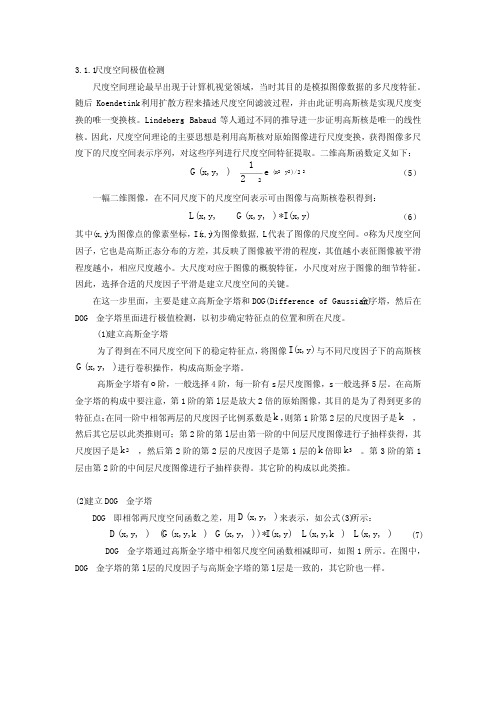
3.1.1尺度空间极值检测尺度空间理论最早出现于计算机视觉领域,当时其目的是模拟图像数据的多尺度特征。
随后Koendetink利用扩散方程来描述尺度空间滤波过程,并由此证明高斯核是实现尺度变换的唯一变换核。
Lindeberg ,Babaud 等人通过不同的推导进一步证明高斯核是唯一的线性核。
因此,尺度空间理论的主要思想是利用高斯核对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间特征提取。
二维高斯函数定义如下:222()/221(,,)2x y G x y e (5)一幅二维图像,在不同尺度下的尺度空间表示可由图像与高斯核卷积得到:(,,(,,)*(,)L x y G x y I x y (6)其中(x,y )为图像点的像素坐标,I(x,y )为图像数据, L代表了图像的尺度空间。
σ称为尺度空间因子,它也是高斯正态分布的方差,其反映了图像被平滑的程度,其值越小表征图像被平滑程度越小,相应尺度越小。
大尺度对应于图像的概貌特征,小尺度对应于图像的细节特征。
因此,选择合适的尺度因子平滑是建立尺度空间的关键。
在这一步里面,主要是建立高斯金字塔和DOG(Difference of Gaussian)金字塔,然后在DOG 金字塔里面进行极值检测,以初步确定特征点的位置和所在尺度。
(1)建立高斯金字塔为了得到在不同尺度空间下的稳定特征点,将图像(,)I x y 与不同尺度因子下的高斯核(,,)G x y 进行卷积操作,构成高斯金字塔。
高斯金字塔有o 阶,一般选择4阶,每一阶有s 层尺度图像,s 一般选择5层。
在高斯金字塔的构成中要注意,第1阶的第l 层是放大2倍的原始图像,其目的是为了得到更多的特征点;在同一阶中相邻两层的尺度因子比例系数是k ,则第1阶第2层的尺度因子是k ,然后其它层以此类推则可;第2阶的第l 层由第一阶的中间层尺度图像进行子抽样获得,其尺度因子是2k ,然后第2阶的第2层的尺度因子是第1层的k 倍即3k 。
SIFT算法~薛纯
为最小的特征值,
2
Dxx H Dxy
则
Dxy Dyy
r
Tr H r 1 Det H r
2
Tr H Dxx Dyy
Det H Dxx Dyy Dxy Dxy
在两特征值相等时达最小,随r的
尺度不变特征变换匹配算法 (SIFT算法)
薛纯
提纲
1. SIFT简介
SIFT
Scale Invariant Feature Transform
2. SIFT算法实现细节
3. SIFT算法的应用领域
2015/1/5
2
SIFT简介
传统的特征提取方法
SIFT
Scale Invariant Feature Transform
•传统的匹配算法往往是直接提取角点或边缘,对环境的
适应能力较差
2015/1/5
3
SIFT简介
SIFT提出
SIFT
Scale Invariant Feature Transform
David G. Lowe University of British Columbia
• 1999年大卫.劳伊教授提出SIFT(尺度不变特征变 换)算法,这种算法在2004年被加以完善。
梯度幅值:
m x, y
L x 1, y L x 1, y L x, y 1 L x, y 1
2
1
2
梯度方向:
L x, y 1 L x, y 1 x, y tan L x 1, y L x 1, y
SIFT
SIFT算法原理:SIFT算法详细介绍

前面们介绍了Harris和Shi-Tomasi角检测算法,这两种算法具有旋转不变性,但不具有尺度不变性,以下图为例,在左侧小图中可以检测到角,但图像被放后,在使用同样的窗口,就检测不到角了。
所以,们来介绍一种计算机视觉的算法,尺度不变特征转换即SIFT(Scale-invariantfeaturetransform)。
它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值,并提取出其位置、尺度、旋转不变量,此算法由DavidLowe在1999年所发表,2004年完善总结。
应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对等领域。
SIFT算法的实质在不同的尺度空间上查找关键(特征),并计算出关键的方向。
SIFT 所查找到的关键一些十分突出,不会因光照,仿变换和噪音等因素而变化的,如角、边缘、暗区的亮及亮区的暗等。
1.1基本流程Lowe将SIFT算法分解为如下四步:尺度空间极值检测:搜索所有尺度上的图像位置。
通过高斯差分函数来识别潜在的对于尺度和旋转不变的关键。
关键定位:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。
关键的选择依据于它们的稳定程度。
关键方向确定:基于图像局部的梯度方向,分配给每个关键位置一个或多个方向。
所有后面的对图像数据的操作都相对于关键的方向、尺度和位置进行变换,从而保证了对于这些变换的不变性。
关键描述:在每个关键周围的邻域内,在选定的尺度上测量图像局部的梯度。
这些梯度作为关键的描述符,它允许比较的局部形状的变形或光照变化。
们就沿着Lowe的步骤,对SIFT算法的实现过程进行介绍:1.2尺度空间极值检测在不同的尺度空间不能使用相同的窗口检测极值,对小的关键使用小的窗口,对的关键使用的窗口,为了达到上述目的,们使用尺度空间滤波器。
高斯核可以产生多尺度空间的核函数。
-《Scale-spacetheory:Abasictoolforanalysingstructuresatdifferentscales》。
sift算法计算旋转参数
sift算法计算旋转参数SIFT算法是一种常用的图像特征提取算法,它可以用于计算图像的旋转参数。
本文将介绍SIFT算法的原理和计算旋转参数的步骤。
一、SIFT算法原理SIFT(Scale Invariant Feature Transform)算法是由David Lowe于1999年提出的一种图像处理算法,它主要用于图像特征提取和匹配。
SIFT算法通过寻找图像中的关键点,并提取关键点周围的特征描述子,从而实现对图像的特征提取和匹配。
SIFT算法的主要步骤包括:尺度空间极值检测、关键点定位、方向分配、特征描述和特征匹配。
其中,关键点定位和方向分配是计算旋转参数的关键步骤。
二、计算旋转参数的步骤1. 尺度空间极值检测SIFT算法首先对输入图像进行尺度空间的构建,通过高斯金字塔和DOG(Difference of Gaussian)计算得到图像的尺度空间。
然后,在每组DOG图像中寻找极值点,用于标记潜在的关键点。
2. 关键点定位在寻找极值点的基础上,SIFT算法采用了稳定的关键点定位方法,通过比较极值点与周围像素的梯度和曲率信息,筛选出稳定的关键点。
这些关键点具有尺度和旋转不变性,可以在不同尺度和旋转角度的图像中进行匹配。
3. 方向分配为了使关键点具有旋转不变性,SIFT算法为每个关键点分配一个主方向。
具体做法是在关键点周围的区域中计算梯度直方图,找到梯度最大的方向作为主方向。
这样,即使图像发生旋转,关键点的描述子仍然可以进行匹配。
4. 特征描述在确定了关键点的尺度和旋转参数后,SIFT算法采用了局部图像块的特征描述方法。
它将关键点周围的图像区域分成若干个子区域,并计算每个子区域的梯度直方图。
然后,将这些直方图组合成一个特征向量,形成关键点的描述子。
5. 特征匹配SIFT算法使用特征向量进行特征匹配。
常用的方法是计算两个图像之间的欧氏距离,找到距离最小的匹配对。
通过特征匹配,可以实现对图像的旋转参数的计算。
SIFT特征点提取与匹配算法
SIFT特征点提取与匹配算法SIFT (Scale-Invariant Feature Transform) 特征点提取与匹配算法是一种在计算机视觉领域中常用的特征点提取与匹配方法。
它由David Lowe在1999年提出,并且成为了计算机视觉领域中广泛应用的算法之一、SIFT特征点提取与匹配算法的主要思想在于提取图像中具有独特性、不受尺度变化和旋转变化影响的局部特征点,并通过特征匹配找到两幅图像之间的对应关系。
SIFT算法主要分为4个步骤:尺度空间极值检测、关键点定位、方向分配和特征描述。
第一步,尺度空间极值检测。
该步骤旨在检测图像中所有尺度的极值点作为特征点的候选。
为了对图像进行不同尺度的检测,SIFT算法使用了高斯金字塔。
高斯金字塔是通过对原始图像进行一系列高斯模糊和下采样操作构建的图像金字塔。
在每一组金字塔中,通过计算图像在不同尺度下的拉普拉斯变换,得到图像的尺度空间表征。
然后,通过比较每一层相邻像素点的灰度,检测出具有极值的像素点。
这些极值点将被作为候选的关键点。
第二步,关键点定位。
在这一步骤中,SIFT算法对候选的关键点进行一系列的筛选,以保留稳定的关键点。
首先,使用插值的方法对关键点进行亚像素精确定位。
然后,根据图像的梯度信息计算关键点的主曲率,通过判断主曲率是否小于阈值,来筛选掉低对比度的关键点和边缘响应的关键点。
此外,通过计算关键点的梯度方向,可以为后续的方向分配做准备。
第三步,方向分配。
为了提高特征点的旋转不变性,在这一步骤中,SIFT算法为每个关键点分配一个主方向。
具体地,SIFT算法将关键点的周围区域分为若干个子区域,并计算每个子区域的梯度方向直方图。
通过找到直方图中的局部极大值,选择关键点的主方向。
这样,即使图像发生旋转,关键点的描述子也能够保持一致性。
第四步,特征描述。
在这一步骤中,SIFT算法为每个关键点生成一个128维的描述子。
描述子的生成主要通过计算关键点周围区域内的梯度信息。
《浅谈sift算子》课件
THANKS FOR WATCHING
感谢您的观看
SIFT算子的关键点检测
01
关键点检测是SIFT算法中的另 一个重要步骤,目的是从极值 点中筛选出稳定的特征点作为 关键点。
02
关键点检测算法采用Hessian 矩阵和特征值分析的方法,通 过计算极值点的Hessian矩阵 ,并根据其特征值的大小确定 关键点的稳定性。
03
关键点检测过程中还需要考虑 图像的梯度方向和幅值信息, 以确定关键点的位置和主方向 。
《浅谈SIFT算子》PPT课件
目 录
• SIFT算子概述 • SIFT算子的原理 • SIFT算子的实现过程 • SIFT算子的优缺点分析 • SIFT算子的应用案例
01 SIFT算子概述
SIFT算子的定义
尺度不变特征变换算子(ScaleInvariant Feature Transform,简称 SIFT)是一种用于图像处理和计算机 视觉领域的特征检测算法。
它通过在不同尺度空间上检测关键点 ,并提取关键点的位置、尺度、旋转 不变性等特征信息,用于图像匹配、 目标识别、三维重建等应用。
SIFT算子的特点
尺度不变性
SIFT算法在不同尺度空间上检测关键点 ,使得算法对图像的尺度变化具有较好
的适应性。
稳定性
SIFT算法能够有效地排除噪声干扰, 稳定地检测到关键点,并提取出准确
增强抗噪声能力
改进关键点检测和描述符生成算法,提高SIFT算子 对噪声的鲁棒性。
拓展应用领域
结合深度学习等先进技术,将SIFT算子应用 于更多领域,如目标检测、行为分析等。
05 SIFT算子的应用案例
SIFT算子在图像识别中的应用
总结词
SIFT算子在图像识别中具有重要作用,能够提取图像的关键特征,实现快速准确的识别 。
SIFT特征提取算法
SIFT特征提取算法SIFT特征提取算法(Scale-Invariant Feature Transform)是一种计算机视觉领域广泛应用的特征提取算法,它具有尺度不变性和旋转不变性的特点,能够在图像中鲁棒地提取出关键点,并生成与这些关键点相关的描述子,以实现图像特征的匹配和识别。
SIFT特征提取算法包含以下几个重要的步骤:尺度空间极值检测、关键点定位、关键点方向确定、关键点描述子生成等。
首先,SIFT特征提取算法从一幅图像中构建尺度空间。
为了实现尺度不变性,SIFT算法利用高斯金字塔模拟不同尺度下的图像,通过对图像进行多次高斯模糊操作得到一系列尺度不同的图像。
然后,通过对这些图像进行差分运算,得到一组差分图像用于尺度空间极值检测。
接下来,SIFT算法从尺度空间极值检测结果中选取稳定的关键点。
在差分图像中,极值点表示着尺度空间中的局部最大值或最小值,这些极值点对应着图像中的关键点。
为了保证关键点的稳定性,SIFT算法会过滤掉一些不稳定的候选关键点,例如低对比度的关键点和边缘响应较大的关键点。
然后,对于选取的关键点,SIFT算法会计算它们的主方向。
利用关键点附近的梯度直方图,SIFT算法可以确定关键点的方向。
这个主方向可以提高后续描述子生成的旋转不变性。
最后,SIFT算法根据关键点的位置和主方向生成关键点的描述子。
在关键点周围的邻域内,SIFT算法通过计算邻域内像素的梯度幅值和方向,生成一个特征向量来描述关键点的外观特征。
这个特征向量被称为SIFT特征描述子,通常是一个128维的向量。
为了保证描述子的不变性,SIFT算法对特征向量进行了归一化和方向旋转等处理。
总结来说,SIFT特征提取算法通过尺度空间极值检测、关键点定位、关键点方向确定和关键点描述子生成等步骤,能够从图像中提取出具有尺度不变性和旋转不变性的关键点和描述子。
SIFT特征提取算法在计算机视觉领域有着广泛的应用,例如图像匹配、物体识别和三维重建等任务中都能够发挥重要作用。
sift算法解析

a
b
13
相关的极值检测
• 作为加快理解的两个金字塔相关背景介绍 完毕,下面提出的是关于极值检测的方法, 极值的检测操作是基于第二个金字塔的, 与第一个金字塔没有直接关系,并且搜索 的基本原理我认为与harris的角点检测是十 分接近的,其原理如下图:
14
图示如下
极值点的搜索是通过同一 组内DOG相邻层之间比较 完成的. 为了寻找尺度空间的极值 点,每一个采样点都要和 它所有的相邻点比较,以 确保在尺度空间和二维图 像空间都检测到极值点。
19
• 导数 D 通过相邻采样点的差值计算。D 的 主曲率和 H 的特征值成正比,
• 令 , 为最大,最小特征值,则
tr ( H ) D xx D yy Det( H ) D xx D yy ( D xy ) 2
• 令 为最大特征值与最小特征值的比值,则
• 因为DOG算子会产生较强的边缘响应,所以 应去除低对比度的边缘响应点,以增强匹 配的稳定性,提高抗噪声能力。一个平坦 的DOG响应峰值往往在在横跨边缘的地方 有较大的主曲率,而在垂直边缘的方向有 较小的主曲率。 • 主曲率通过一个2*2的Hessian矩阵 H 求出:
Dxx H Dxy Dxy D yy
2
e
( x 2 y 2 )/2 2
( • 其中,x, y ) 是空间坐标, 代表高斯正态 分布的方差,亦即尺度坐标(在尺度空间 中)。
7
两个金字塔的引入
• 要实现极值的检测要引入两个金字塔(形 象化的表示,算法中为了便于理解):
1建立高斯金字塔 2生成DOG金字塔(Difference-of-Gaussian)
• 高斯金字塔的构建:
SIFT特征提取算法总结

SIFT特征提取算法总结SIFT(Scale-Invariant Feature Transform)特征提取算法是一种旋转不变性和尺度不变性较强的特征提取算法,被广泛应用于计算机视觉领域中的图像配准、目标识别、三维重建等任务中。
SIFT算法由David Lowe在1999年提出,并在2004年发表了他的论文,成为一种经典的特征提取算法。
本篇文章将对SIFT特征提取算法进行总结和分析。
1.SIFT特征提取算法原理(1)尺度空间极值检测:在不同的尺度空间中寻找关键点。
SIFT算法使用高斯金字塔对图像进行尺度空间的离散采样。
在每个尺度空间中,通过构建DoG(Difference of Gaussian)金字塔来检测图像中的局部极值点。
(2)关键点定位:对尺度空间极值点进行精确定位以得到关键点。
在尺度空间中使用Hessian矩阵来估计关键点的位置和尺度,并通过亚像素插值来获得更加精确的关键点位置。
(3)方向分配:为每个关键点分配主方向。
SIFT算法在关键点周围的邻域内计算梯度方向直方图,选择梯度方向最大的方向作为该关键点的主方向。
(4)描述子生成:对关键点周围的邻域进行描述子的生成。
SIFT算法将关键点周围的邻域划分为一个个小区域,并计算每个小区域内的梯度方向直方图,从而生成描述子。
2.SIFT特征提取算法优点(1)尺度不变性:SIFT算法在不同尺度空间中检测图像的关键点,使得检测到的关键点能够具有尺度不变性。
(2)旋转不变性:SIFT算法对每个关键点分配主方向,通过旋转关键点周围的邻域来实现旋转不变性。
(3)良好的特征描述性:SIFT特征由128维向量表示,能够克服一些小范围内的图像变换,如亮度变化等。
(4)鲁棒性:SIFT算法对噪声、模糊等干扰具有较强的鲁棒性,适用于复杂的图像条件下提取特征。
3.SIFT特征提取算法应用SIFT特征提取算法广泛应用于计算机视觉领域中的图像配准、目标识别、三维重建等任务中。
SIFT算法简介
SIFT算法简介•o▪1、 STFT(Scale Invariant Feature Transform)简介▪ 1.1 SIFT特征检测的步骤▪ 1.2 SIFT算法的特点▪ 1.3 SIFT算法可以解决的问题▪ 2 、尺度空间▪ 2.1 多分辨率金字塔▪ 2.2 高斯金字塔构建示例▪ 2.3 高斯尺度空间(使用不同的参数)▪3、DoG空间极值检测(查找关键点)▪4、删除不好的极值点(特征点)▪5、求取特征点的主方向▪6、生成特征描述▪7、总结1、 STFT(Scale Invariant Feature Transform)简介匹配的核心问题是将同一目标在不同时间、不同分辨率、不同光照、不同方向的情况下所成的像对应起来。
传统的匹配算法往往是直接提取角点或边缘,对环境的适应能力较差,需要一种鲁棒性强,能够适应不同情况的有效的目标识别的方法。
SIFT由David Lowe在1999年提出,在2004年加以完善 [1-2] 。
SIFT在数字图像的特征描述方面当之无愧可称之为最红最火的一种,许多人对SIFT进行了改进,诞生了SIFT的一系列变种。
SIFT已经申请了专利。
1.1 SIFT特征检测的步骤•尺度空间的极值检测:搜索所有尺度空间上的图像,通过高斯微分函数来识别潜在的对尺度和旋转不变的兴趣点。
•特征点定位:在每个候选的位置上,通过一个拟合精细模型来确定位置尺度,关键点的选取依据他们的稳定程度。
•特征方向赋值:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向,后续的所有操作都是对于关键点的方向、尺度和位置进行变换,从而提供这些特征的不变性。
•特征点描述:在每个特征点周围的邻域内,在选定的尺度上测量图像的局部梯度,这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变换。
•(图源)1.2 SIFT算法的特点1.图像的局部特征,对旋转、尺度缩放、亮度变化保持不变,对视角变化、仿射变换、噪声也保持一定程度的稳定性。
SIFT算法原理SIFT算法详细介绍

SIFT算法原理SIFT算法详细介绍SIFT(Scale-Invariant Feature Transform)算法是一种用于图像特征提取和匹配的算法,被广泛应用于计算机视觉领域。
SIFT算法的核心思想是在不同尺度空间中检测和描述图像的局部特征,通过这些特征可实现图像的匹配、识别和定位。
1.尺度空间极值点检测:首先,SIFT算法通过高斯平滑滤波器构建高斯金字塔,每一层都是由上一层进行降采样得到的。
在不同尺度空间的图像上,通过比较每个像素点与其相邻像素点的灰度值,找出尺度空间极值点,作为关键点候选。
2.关键点定位:通过对尺度空间的极值点进行精确定位,以获取更加准确的关键点。
在关键点候选集合中,利用尺度空间的极值点与梯度方向直方图等局部特征进行过滤,剔除低对比度和边缘响应的关键点。
3.方向分配:为了使SIFT算法具有旋转不变性,需要为每个关键点分配主方向。
采用梯度直方图对关键点周围的图像区域进行统计,找到梯度方向直方图的峰值,作为该关键点的主方向。
4.关键点描述:在每个关键点周围的图像区域内,构建128维的特征向量,用于描述该关键点的局部特征。
通过计算每个像素点周围的梯度幅值和方向,并将其转换为特征向量的模式,构成关键点的描述符。
5.特征匹配:对于待匹配的图像,通过计算两个图像的特征向量之间的欧氏距离,进行特征匹配。
采用距离比值方法,选取最匹配和次匹配之间的距离比值小于预先设定的阈值的特征点,进行最终匹配。
6.特征筛选:通过应用RANSAC(随机抽样一致性)算法,对匹配结果进行筛选,剔除外点,保留内点,从而得到更准确的匹配结果。
SIFT算法的应用非常广泛,常用于目标识别、图像拼接、图像检索、三维重建和运动估计等领域。
在目标识别中,通过提取图像的SIFT特征,并与模板图像进行匹配,可以实现目标的识别和定位。
在图像拼接中,通过寻找多幅图像之间的共同特征点,并根据特征点的位置关系进行配准,可以实现图像的自动拼接。
SIFT尺度不变特征变换算法
1、SIFT 尺度不变特征变换算法David Lowe关于SIFT算法,2004年发表在Int. Journal ofComputer Vision的经典论文中,对尺度空间(scale space)是这样定义的:It has been shown by Koenderink (1984) and Lindeberg (1994) that under a variety ofreasonable assumptions the only possible scale-space kernel is the Gaussian function.Therefore,the scale space of an image is defined as a function, L(x; y; delta) that is produced from the convolution of a variable-scale Gaussian, G(x; y; delta), with an input image, I(x; y):因此,一个图像的尺度空间,L(x,y,delta) ,定义为原始图像I (x,y)与一个可变尺度的2维高斯函数G(x,y,delta)卷积运算。
关于图象处理中的空间域卷积运算,可以参考经典的图像处理教材(比如美国冈萨雷斯的图象处理,第二版,或者其Matlab版,都有如何在离散空间进行运算的例子和说明)注:原文中delta为希腊字母,这里无法表示,用delta代替。
Sift 算法中,提到了尺度空间,请问什么是尺度和尺度空间呢?在上述理解的基础上,尺度就是受delta这个参数控制的表示。
而不同的L(x,y,delta)就构成了尺度空间(Space,我理解,由于描述图像的时候,一般用连续函数比较好描述公式,所以,采用空间集合,空间的概念正规一些),实际上,具体计算的时候,即使连续的高斯函数,都要被离散为(一般为奇数大小)(2*k+1) *(2*k+1)矩阵,来和数字图像进行卷积运算。
SIFT算法的介绍和应用
SIFT算法的介绍和应用﹡The Introduction and Application of SIFT1曾锻成赵建锋,2陈志华,1吴彩荣,2CHEN Zhi-hua1, WU Cai-rong1, ZHAO Jian-feng2, ZENG Duan-cheng2(1.南宁海蓝数据有限公司,广西南宁 530022 2.广西计算中心,广西南宁 530022) (1.Highland Dightal Technology INC.,Nanning,Guangxi,530022,China puting Center of Guangxi,Nanning,Guangxi,530022,China)摘 要:在图像匹配中,有很多种算法。
在这众多的算法中,SIFT算法具有良好的尺度、光照和空间旋转的不变性,所以被广泛的应用于图像匹配当中。
本文对SIFT算法的四个主要步骤进行了简单的介绍,并将该算法应用到多色二值压缩的压缩算法当中,提高了压缩效率并且缩小了压缩后的存储空间。
关键词:SIFT 特征描述符 尺度空间 高斯差分 关键点 图像压缩Abstract:There are a lot of algorithms in image matching. With the algorithm named SIFT we can extract features invariant to scale and rotation from images. The algorithm is widely used in image matching because of its excellent property. This paper presents the main steps of SIFT algorithm. We applied it to the patent about image compression. As a result, the effect of the patent is improved and the storage of the compression is reduced.Key words:SIFT,feature descriptor,scale space,difference of Gaussian,key points,image compression引言图像匹配是计算机视觉的一个重要方面,在众多的视觉应用中是个关键技术,广泛的应用于地理信息系统、物体识别领域。
SIFT特征提取及其应用

SIFT
Scale Invariant Feature Transform
3. 高斯模糊
高斯模糊是在图像处理软件中广泛使用的处理效果,通常用它来减小 图像噪声以及降低细节层次。这种模糊技术生成的图像的视觉效果是 好像经过一个半透明的屏幕观察图像。
2019/11/28
13
关键点检测 的相关概念
SIFT
2019/11/28
21
DoG局部极值检测
SIFT
Scale Invariant Feature Transform
关键点精确定位
由于DoG值对噪声和边缘较敏感,因此,在上面DoG尺度空间中检测到局部 极值点还要经过进一步的检验才能精确定位为特征点。
为了提高关键点的稳定性,需要对尺度空间DoG函数进行曲线拟合。利用 DoG函数在尺度空间的Taylor展开式:
DoG在计算上只需相邻尺度高斯平滑后图像相减,因此简化了计算!
2019/11/28
17
关键点检测——DOG
DoG高斯差分金字塔
对应DOG算子,我们要构建DOG金字塔
我们可以通过高斯差分图 像看出图像上的像素值变 化情况。(如果没有变化, 也就没有特征。特征必须 是变化尽可能多的点。) DOG图像描绘的是目标的 轮廓。
Back
2019/11/28
7
SIFT算法实现细节
SIFT
Scale Invariant Feature Transform
SIFT算法实现步骤简述
SIFT算法的实质可以归为在不同尺度空间上查找特征点(关键点)的问题。
原图像 目标图像
特征点 检测
特征点 描述
SIFT
特征点 检测
特征点 描述
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 高斯模糊具有线性可分的性质,也可以在二维图像上对两个独立的一 维空间分别进行计算。这样可以大大减少了运算的次数。
• 对一幅图像进行多次连续高斯模糊的效果与一次更大的高斯模糊可以 产生同样的效果,大的高斯模糊的半径是所用多个高斯模糊半径平方 和的平方根。例如,使用半径分别为 6 和 8 的两次高斯模糊变换得 到的效果等同于一次半径为 10 的高斯模糊效果, 62 82 10 根据这个关系,使用多个连续较小的高斯模糊处理不会比单个高斯较 大处理时间要少。
SIFT
Scale Invariant Feature Transform
Octave 5 Octave 4 Octave 3
…
8
…
4
…
2
…
Octave 2
…
Octave 1
2013/7/11
17
关键点检测的相关概念
• 高斯图像金字塔共o组、s层, 则有:
SIFT
Scale Invariant Feature Transform
SIFT
Scale Invariant Feature Transform
0.00002292 0.00078633 0.00655965 0.01330373 0.00655965 0.00078633 0.00002292
0.00000067 0.00002292 0.00019117 0.00038771 0.00019117 0.00002292 0.00000067
高斯函数
( x xi )2 ( y yi )2 G xi , yi , exp 2 2 2 2 1
L x, y, G x, y, * I x, y
尺度是自然存在的,不是人为创造的!高斯卷 积只是表现尺度空间的一种形式…
SIFT简介
SIFT
Scale Invariant Feature Transform
Original image courtesy of David Lowe
将一幅图像映射(变换)为一个局部特征向量集;特征向量具有 平移、缩放、旋转不变性,同时对光照变化、仿射及投影变换也有一定 不变性。
2013/7/11 5
2013/7/11
14
关键点检测的相关概念 关键点检测
高斯模板大小的选择
高斯模板
0.00000067 0.00002292 0.00019117 0.00038771 0.00019117 0.00002292 0.00000067 0.00002292 0.00078633 0.00655965 0.01330373 0.00655965 0.00078633 0.00002292 0.00019117 0.00655965 0.05472157 0.11098164 0.05472157 0.00655965 0.00019117 0.00038771 0.01330373 0.11098164 0.22508352 0.11098164 0.01330373 0.00038771 0.00019117 0.00655965 0.05472157 0.11098164 0.05472157 0.00655965 0.00019117
• 在实际应用中,在计算高斯函数的离散近似时,在大概3σ距离之外 的像素都可以看作不起作用,这些像素的计算也就可以忽略。
• 通常,图像处理程序只需要计算 (6 1) (6 1)
2013/7/11
15
关键点检测的相关概念 关键点检测
高斯模糊的性质
• 高斯模糊具有圆对称性。
SIFT
Scale Invariant Feature Transform
这些点是一些十分突出的点不会因光照条件的改变而消失,比如角点、 边缘点、暗区域的亮点以及亮区域的暗点,既然两幅图像中有相同的景物, 那么使用某种方法分别提取各自的稳定点,这些点之间会有相互对应的匹配 点。 所谓关键点,就是在不同尺度空间的图像下检测出的具有方向 信息的局部极值点。 根据归纳,我们可以看出特征点具有的三个特征: 尺度 方向 大小
Octave 5 Octave 4 Octave 3
…
( s ) 0 2
s
8
…
S
4
…
σ——尺度空间坐标; s——sub-level层坐标; σ0——初始尺度; S——每组层数(一般为3~5)。
2
…
Octave 2
…
Octave 1
2013/7/11
18
关键点检测的相关概念
• 高斯金字塔的初始尺度
2. SIFT算法实现细节
3. SIFT算法的应用领域 4. SIFT算法的扩展与改进
2013/7/11
2
SIFT简介
传统的特征提取方法
•
SIFT
Scale Invariant Feature Transform
成像匹配的核心问题是将同一目标在不同时间、不同
分辨率、不同光照、不同位姿情况下所成的像相对应。 传统的匹配算法往往是直接提取角点或边缘,对环境的
SIFT简介
SIFT算法特点
SIFT
Scale Invariant Feature Transform
• SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化
保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳 定性。
• 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征
2013/7/11
16
关键点检测的相关概念 关键点检测
4. 高斯金字塔
• 高斯金子塔的构建过程可分为 两步: (1)对图像做高斯平滑; (2)对图像做降采样。 为了让尺度体现其连续性,在简单 下采样的基础上加上了高斯滤波。 一幅图像可以产生几组(octave) 图像,一组图像包括几层 (interval)图像。
SIFT
目标图像
特征点 检测
SIFT
SIFT算法实现物体识别主要有三大工序,1、提取关键点;2、对关键点附加 详细的信息(局部特征)也就是所谓的描述器;3、通过两方特征点(附带
上特征向量的关键点)的两两比较找出相互匹配的若干对特征点,也就建立
2013/7/11 了景物间的对应关系。 8
SIFT算法实现细节
2013/7/11
12
关键点检测的相关概念 关键点检测
3. 高斯模糊
SIFT
Scale Invariant Feature Transform
高斯模糊是在Adobe Photoshop等图像处理软件中广泛使用的处理 效果,通常用它来减小图像噪声以及降低细节层次。这种模糊技术生成 的图像的视觉效果是好像经过一个半透明的屏幕观察图像。
目标的自身状态、场景所处的环境和成像器材的成像特性等因 素影响图像配准/目标识别跟踪的性能。而SIFT算法在一定程度上可解决:
•
目标的旋转、缩放、平移(RST) 图像仿射/投影变换(视点viewpoint) 光照影响(illumination) 目标遮挡(occlusion) 杂物场景(clutter) 噪声
2013/7/11
13
关键点检测的相关概念 关键点检测
r2 G r exp 2 2 2 2 1
2 2 r为模糊半径, r= x y
SIFT
Scale Invariant Feature Transform
在减小图像尺寸的场合经常使用高斯模糊。在进行欠采样的时, 通常在采样之前对图像进行低通滤波处理。这样就可以保证在采样 图像中不会出现虚假的高频信息。
SIFT算法实现步骤
SIFT
Scale Invariant Feature Transform
1.
关键点检测
关键点描述
2.
3.
4.
关键点匹配
消除错配点
2013/7/11
9
关键点检测的相关概念
SIFT
Scale Invariant Feature Transform
1. 哪些点是SIFT中要查找的关键013/7/11
SIFT算法实现细节
SIFT算法实现步骤简述
SIFT
Scale Invariant Feature Transform
SIFT算法的实质可以归为在不同尺度空间上查找特征点(关键点)的问题。
原图像 特征点 检测 特征点 描述 目标的特 征点集 特征点匹 配 特征点 描述 目标的特 征点集 匹配点矫 正
适应能力较差,急需提出一种鲁棒性强、能够适应不同
光照、不同位姿等情况下能够有效识别目标的方法。
2013/7/11
3
SIFT简介
SIFT提出的目的和意义
SIFT
Scale Invariant Feature Transform
David G. Lowe Computer Science Department 2366 Main Mall University of British Columbia Vancouver, B.C., V6T 1Z4, Canada E-mail: lowe@cs.ubc.ca
2013/7/11
10
关键点检测的相关概念 关键点检测的
2. 什么是尺度空间(scale space )?
SIFT
Scale Invariant Feature Transform
我们要精确表示的物体都是通过一定的尺度来反映的。现实世界的 物体也总是通过不同尺度的观察而得到不同的变化。
尺度空间理论最早在1962年提出,其主要思想是通过对原始图像进 行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行 尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、 角点检测和不同分辨率上的特征提取等。 尺度空间中各尺度图像的模糊程度逐渐变大,能够模拟人在距离目 标由近到远时目标在视网膜上的形成过程。 尺度越大图像越模糊。