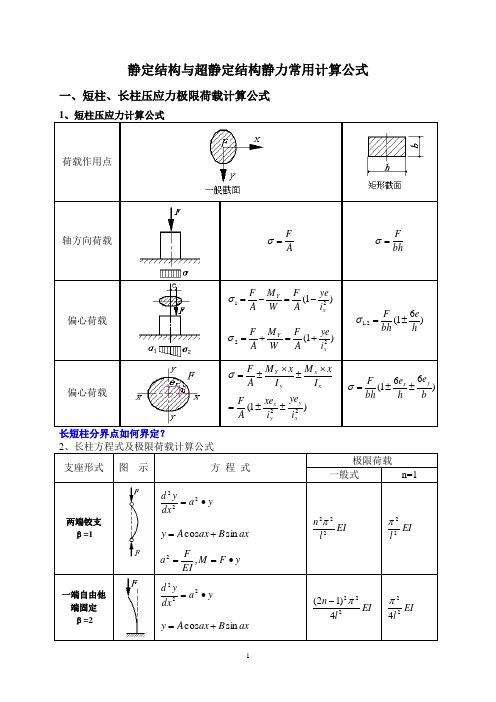
1、静定结构与超静定结构静力计算公式
结构力学第六章 力法

四、n次超静定结构的力法典型方程
i1X1 i2 X 2 in X n iP 0(i 1、2、、n)
符号意义同前。 求解内力(作内力图)的公式:
M M1X1 M2X2 Mn Xn M P
FQ FQ1X1 FQ2 X2 FQn Xn FQP
FN FN1 X1 FN 2 X 2 FNn X n FNP 作内力图可以延用第三章的作法:由M→FQ→FN。
通常做法:拆除原结构的所有多余约束,代之 以多余力X,而得到静定结构。
规则: 1)去掉或切断一根链杆,相当于去掉一个约束; 2)去掉一个简单铰,相当于去掉两个约束; 3)去掉一个固定支座或切断一根梁式杆,相当于去 掉三个约束; 4)在梁式杆上加一个简单铰,相当于去掉一个约束。
10
例: a)
X1
X2
37
2、列 力法方程
1211XX11
12 X 2 22 X 2
1P 2P
0 0
(B 0) (C 0)
讨论方程和系数的物理意义。
q
A
D
Δ1P B
C
A
X1=1
δ11 δ21
D
B
C
A
δ12
X2=1 δ22
D
B C
38
位移方程(力法方程)
ΔφB=0 ——B左右截面相对转角等于零。 ΔφC=0 —— C左右截面相对转角等于零。
d)
原结构
X2
X1
X1
X2
n=2
13
e)
原结构
X1 X1 n=1
f)
原结构
n=3
X1
X3
X2
特别注意:不要把原结
构拆成几何可变体系。此
《建筑力学与结构》课件——第十章 超静定结构的内力计算

力法计算超静定结构
(2) 建立力法方程
11X 1 12X 2 1F 0 21X 1 22X 2 2F 0
建筑力学与结构
(3) 计算系数和自由项
δ11 4a3 / 3EI
1F 5qa4 / 8EI
2024/11/13
δ22 a3 / 3EI δ12 δ21 a3 / 2EI 2F qa4 / 4EI
M AB
M1X1
MF
l 3 ql 8
1 ql 2 2
1 ql 2 8
取多余未知力作为基本未知量,通过基本结构,利用
计算静定结构的位移,达到求解超静定结构的方法,称为力
法。
2024/11/13
13
力法计算超静定结构
2.力法的典型方程
建筑力学与结构
1 11 X1 12 X 2 1F 0 2 21 X1 22 X 2 2F 0
2024/11/13
14
力法计算超静定结构
建筑力学与结构 n次超静定结构
δ11 X 1 δ12 X 2 δ1i X i δ1n X n 1F 0 δ21 X1 δ22 X 2 δ2i X i δ2n X n 2F 0
…………………………………………..……
δn1 X1 δn2 X 2 δni X i δnn X n nF 0
2024/11/13
7超静定次数的确定来自建筑力学与结构 3.去掉一个固定支座或切断一根梁式杆,相当于去掉三个约束,用 三个约束反力代替该约束作用。
2024/11/13
8
超静定次数的确定
建筑力学与结构 4.将一刚结点改为单铰联结或将一个固定支座改为固定铰支座,相 当于去掉一个约束,用一个约束反力代替该约束作用。
各杆的杆端弯矩表达式
结构力学静定结构与超静定结构

结构力学静定结构与超静定结构结构力学是研究结构承受外力后的力学性能的学科,它在建筑、机械、航空航天等领域都扮演着重要的角色。
在结构力学中,我们可以将结构分为两类:静定结构和超静定结构。
静定结构是指在确定边界条件下,结构的所有支反力以及结构内部的应力分布等参数都可以通过静力平衡方程唯一求解出来的结构。
在静定结构中,支反力的计算可以通过平衡方程解决,而应力的计算可以通过弹性力学理论求解。
以简支梁为例,简支梁的两端固定支承,中间用力作用时,通过平衡方程可以求解出支反力。
而根据梁的几何形状和荷载的大小,可以计算出梁内部的应力分布。
在静定结构中,支反力和应力可以通过简单的数学计算求解,因此设计和分析起来相对简单。
而超静定结构则相对复杂一些。
超静定结构是指在确定边界条件下,结构的参数无法通过静力平衡方程唯一求解出来的结构。
这意味着在求解超静定结构时,不仅需要静力平衡方程,还需要考虑结构的变形和材料的本构关系等。
以悬臂梁为例,悬臂梁的一端固定支承,另一端悬空。
在悬臂梁上增加一个附加支承,形成一个超静定结构。
在这种情况下,由于支承力未知,无法通过静力平衡方程唯一求解出来。
因此,我们需要考虑结构的变形情况,并将其作为一个未知数来求解。
在超静定结构中,我们通常采用的方法是引入截面变形理论和力法。
通过假设结构具有一定的变形形态,并利用力法求解出结构的变形、应力和支反力等参数。
通常情况下,超静定结构的计算需要较为复杂的数学方法和计算机仿真。
静定结构和超静定结构在工程实践中都有广泛的应用。
静定结构常常用于桥梁、楼房等普通建筑结构的设计与分析中,因其计算相对简单,容易掌握。
而超静定结构常常用于大跨度的特殊结构的设计与分析中,如悬索桥、曲线梁等。
虽然超静定结构计算较为复杂,但可以提供更多的设计自由度和结构优化的可能性。
总而言之,静定结构和超静定结构都是结构力学中的重要概念。
静定结构是可通过静力平衡方程求解出内部参数的结构,而超静定结构则需要额外的变形理论和力法求解。
超静定结构的计算
第二节力法
这样,原结构的内力计算问题就转变为基本结构在多余未知 力多的X余基1未本及知未荷力知载量Xq共1就,同是其作多余用余的下未计的知算内力就力。迎计刃算而问解题了了。。因只此要,设力法法求计出算
(二)力法方程 基本结构在月端不再受约束限制,因此在荷载y作用下月点
竖1小因5向-不此10位同基(d移而本)]向异结。下 , 构显由 的[然图于 变在15形X二-11位是者0(c移取共)]状代,同态了在作应被X用1与拆下作原去B用点结约下竖构束月向完对点位全原竖移一结向将致构位随,的移X即作向1的B用上点大,[图 的余方竖未向向知产位力生移X的1位△共移1同必应作须与用为原下零结,,构在也在拆就X除是1方约说向束基的处本位沿结移多构相余在等未已。知知即力荷X:载1作与用多 △1=0 这就是基本结构应满足的变形谐调条件,又称位移条件。
用结所构示11、上。产则12生△、的11、1沿3 △表X11示2方、单向△位的13可力相以X应1表=位1示移, X为,2=如1,X图3=151-分12别(c作),(用d)于, (基c),本(d) 11 11X1、12 12 X 2、13 13 X 3,上面儿何条件(15-2)
中的第一式可以写为:
下一页 返回
第一节超静定结构基本知识
(1)去掉支座处的一根链杆或者切断一根链杆,相当于去掉一 个约束,如图15-3 (a),(b)所示的两个结构都多出来一个约束, 都是一次超静定结构。
(2)去掉一个铰支座或内部的一个单铰,相当于去掉两个约束。 图15-4 (a), (b)所示的两个刚架都多出来两个约束,都是二次 超静定结构。
上一页 下一页 返回
第二节力法
用力法计算超静定结构在支座移动所引起的内力时,其基本 原理和解题步骤与荷载作用的情况相同,只是力法方程中自 由项的计算有所不同,它表示基本结构由于支座移动在多余 约第束五处节沿“多支余 座未 移知 动力 时方 静向 定所 结引 构起 的的 位位 移移 计算△”iC,所可述用方第法十求四得帝。 此外,还应注意力法方程等号右侧为基本结构在拆除约束处 沿多余未知力方向的位移条件,也就是原结构在多余未知力 方正向值的,已否知则实 取际 负位 值移 。值△i,当△i与多余未知力方向一致时取
结构力学——力法

超静定梁
超静定刚架
超静定桁架
超静定拱 超静定组合结构 超静定铰接排架
对超静定结构的内力进行分析的方法主要有两 种,即力法和位移法。本章主要介绍如何用力法求 解超静定结构的内力。
超静定结构具有多余约束,用力法计算超静定 结构的内力时,首先应该确定超静定结构中多余约 束的个数。这个数目表示:除去静力平衡方程外, 尚需补充多少个反应位移条件的方程才能求解全部 的反力和内力。
超静定结构用力法计算绘出最后内力图后,也可用这种方法 计算超静定结构任一已知位移,以进行位移条件的校核。我们可 以计算超静定结构解除约束处的位移,若所求位移与原结构相同 即为正确的,否则是错的。例如,原结构中支座A是固定支座,其 角位移应该为零,利用这一条件即可校核所求得的最后内力图。 图(a)所示刚架支座A的角位移等于图(b)所示基本系中截面A 的角位移,计算该位移时,只需将虚拟力FPk=1作用于基本系的截 面A处,得到下图所示虚拟状态。再将该虚力状态的弯矩图与原超 静定结构的弯矩图图乘,如果原超静定结构弯矩图正确,则必有
12PP 3P
0 0 0
ΔxxX ΔP 0
--- 力法的典型方程
ΔxxX ΔP 0
Δxx :柔度矩阵,即力法方程中的系数矩阵。 X :基本未知量列阵。 ΔP:自由项列阵。
ii 主系数,恒为正。 ik 副系数,可正、负、零。互等关系ik ki(i k)
3 31 32 33 3P 31X1 32 X 2 33 X3 3P 0
矩阵形式:
11 21 31
12 22 32
13 23 33
X X X
1 2 3
静定超静定判断及计算

目的和意义
目的
理解静定与超静定的概念,掌握判断方法,能够进行相应的计算。
意义
在实际工程中,正确判断结构和系统的静定或超静定状态对于确保结构安全、节约材料和降低成本具有重要意义。
02
静定与超静定的基本概念
静定结构的定义
静定结构
在任何外界影响下,其平衡位置都是稳定的 ,且在受到微小扰动后能自动恢复到原来的 平衡状态。
内力计算的方法
静定结构的内力计算通常采用截面法或节点法进行。截面法是通过 截取结构的一部分进行分析,节点法则是对结构的节点进行受力分 析。
内力的表示方法
内力可以用实线和虚线表示,实线表示实际受力方向,虚线表示实际 受力反方向。
静定结构的位移计算
1
位移计算的意义
在结构分析中,位移是一个重要的参数 。通过计算位移,可以了解结构的变形 情况,从而评估结构的稳定性和安全性 。
本文的研究成果已被广泛应用于建筑、机械、航空航天等工程领 域,解决了众多实际工程问题,取得了显著的经济和社会效益。
对未来研究的展望
深入研究复杂结构体系
随着科技的发展,复杂结构体系在工程中越来越常见,未 来研究可进一步探讨复杂结构体系的静定与超静定问题, 提高工程结构的稳定性和安全性。
引入先进计算技术
计算公式
自由度数 = 刚片数 - 约束数。
判断标准
若自由度数等于0,则结构为静定;若自由度数不等于0,则结 构为超静定。
几何法判断
定义
几何法判断是指通过分析结构的几何形状来判断结构是否为静定或超静定的一种方法。
判断标准
若结构的几何形状满足静定结构的条件(即所有刚片都是相互平行的),则结构为静定;否则为超静 定。
01
超静定结构

l
A
B
l
q
D
2 )建立正则方程 1 (δ 11 + ) X 1 + ∆1P = 0 C
3 )求解 2 1 2 2l 3 δ11 = ( × l × l × × l) = EI 2 3 3EI 1 1 ql 2 2l 1 ql 2 3l ∆ 1P = − ( ×l × × + ×l × × ) EI 2 2 3 3 2 4 ∆ 1P 7 ql 4 7 ql =− X1 = − = (↑ ) 1 24 EI 24 δ11 + C 2 )据平衡条件,求得
ql 2 M C = M × X1 = 7
0 C
q
A
ql 2 7
X1
MP
ql 2 2
M
5ql 2 14
M A = M × X 1 − M PA
0 A
5 ql 2 =− 14
例14 − 2 − 4 画图示刚架的内力图。
q
D
q
C
X2
解:利用对称性,从CD中间
X1
EI
D K
剖开,由于结构对称,载荷 对称,故只有对称内力, 所以,X 3 = 0。
δ11
求得 X 1 后,则可解出相当系统所有内力、位移,此相当系统的解 即为原系统的解。
三、n次静不定的正则方程
可将上述思想推广到n次静不定系统,如解除n个多余约束后的未知多余 约束力为 X j ( j = 1,2,..., n ) 它们将引起 X i 作用点的相应的位移为 ∑ ∆ ij ,而原系统由 x j ( j = 1, K n) j =1 与外载荷共同作用对此位移限制为零(或已知),故有
P A C D n O B P (b) P A
超静定结构内力计算

超静定结构内力计算首先,需要明确的是,超静定结构与静定结构的计算方法基本相同,都是通过力平衡和力矩平衡方程来计算结构内力。
下面以一简支梁为例,介绍超静定结构内力计算的方法。
假设有一简支梁,梁长为L,受到均布载荷q,支座A、B处有横向支撑。
我们需要计算梁上任意一点x处的弯矩和剪力。
首先,对于简支梁,力平衡方程可得:∑Fx=0=>RA+RB=0(1)∑Fy=0=>VA+VB-qL=0(2)力矩平衡方程可得:∑Mz=0=>-qLx+VBx=0(3)(x为横坐标)由以上方程可以得到:RA=-RB=-qL/2,VA=-VB=qL/2接下来,我们可以使用能量方法计算结构内力。
能量方法是利用结构所受外界实际工作等于内力做的虚功,通过对外界做功和结构内工作的平衡,求解得到内力。
我们将简支梁分解为多个力学小段,每一小段的长度为Δx。
考虑梁上一小段AB,以A点为起点,Δx位置为B点。
对这一小段,外界对结构所做的虚功为:δWext = -VAdy (4) (dy为小段长度)其中,结构内力V由能量方法得到。
结构内力杆件AB的内工作为:dU = VAdy (5)因为外界做的虚功等于内工作,可得:-δWext = dU将式(4)和式(5)代入上式,得:VAdy = -VAdy对上式进行积分,得:∫VAdy = -∫VAdy∫VAdy = -(∫VAdy)由于简支梁内力为常数,所以可以将其从积分符号中移出,得:V∫Ady = -V∫Ady即:VAΔy=-VAΔy可以看出,对于简支梁而言,外界虚功和结构内工作的积分是相等的。
通过上述分析,我们可以发现,能量方法实际上是在计算外界对结构做的虚功,而虚功就是外界力对结构的作用力乘以作用距离的积分。
所以能量方法的基本思想是通过积分计算外界对结构的虚功,然后根据虚功等于内工作的原理,推导出结构的内力。
总结起来,超静定结构的内力计算方法主要是使用力平衡和力矩平衡方程,利用能量方法计算结构内力。
静定结构内力计算全解[详细]
![静定结构内力计算全解[详细]](https://img.taocdn.com/s3/m/290a22ba7cd184254b3535d4.png)
从组成的观点,静定结构的型式: ✓悬臂式、简支式(两刚片法则) ✓三铰式(三刚片法则) ✓组合式(两种方式的结合)
悬臂式 三铰式
简支式 组合式
组合式结构中:
✓基本部分:结构中先组成的部分,能独立承载; ✓附属部分:后组成的以基本部分为支承的部分,不能独立 承载。
三铰拱作业:
y
100kN
1
A O
2m
20kN/m
4m 8m
2
B x
Hale Waihona Puke 2m求图示抛物线拱的1、2截面的内力。
三、三铰拱的合理拱轴线
使拱在给定荷载下只
M M 0 FH y 0 产生轴力的拱轴线,被
y M0
称为与该荷载对应的合 理拱轴
FH
三铰拱的合理拱轴线 的纵坐标与相应简支梁弯 矩图的竖标成正比。
Mik
i
FQik
Mik
i
Fiy
q Mki
k
FQki q
Mki
k
Fky
叠加法作弯矩图: 叠加法作弯矩图:
+
要点:先求出杆两端 截面弯矩值,然后在 两端弯矩纵距连线的 基础上叠加以同跨度、 同荷载简支梁的弯矩 图。
§3 静定多跨梁与静定平面刚架
一、静定多跨梁 多根梁用铰连接组成的静定体系。
AB、CD梁为基本部分 BC梁为附属部分。
2、求支座反力和内部约束力
根据组成和受力情况,取整个结构或部分结构为隔离 体,应用平衡方程求出。
B
B
F
F
FBy
A FC
FAx A FAy
结构力学第六章力法
弯矩图可按悬臂梁画出
M X1 M 1 M P
§6-4 力法计算超静定桁架和组合结构
一 超静定桁架
F Ni l ii EA F N i F N jl ij EA F N i FN P l iP EA
2
桁架各杆只产生轴力,系数
典型方程: 11 X 1 1P 0
9 17 FP , X 2 FP 80 40
叠加原理求弯矩: M X 1 M 1 X 2 M 2 M P
3FPL/40 3FPL/40
FP 9FP/80
23FP/40 FNDC
FQDC 3FPL/80 FQBD
FQCD FNDA
FQBD=-9FP/80
FNBD=-23FP/40
FQDC=3FP/40+FP/2=23FP/40
2 P 3P 0
11 X 1 1P 0 22 X 2 23 X 3 0 X X 0 33 3 32 2
11 X 1 1P 0 X 2 X 3 0
反对称荷载作用下, 沿对称轴截面上正对称内力为0 例: FP FP/2 FP/2 FP/2
1)一般任意荷载作用下
11 X 1 12 X 2 13 X 3 1P 0 21 X 1 22 X 2 23 X 3 2 P 0 X X X 0 33 3 3P 31 1 32 2
11 X 1 1P 0 22 X 2 23 X 3 2 P 0 X X 0 33 3 3P 32 2
M FN
超静定结构的内力分布与梁式杆和二力杆的相对刚度有关。 链杆EA大,M图接近与连续梁,链杆EA小,M图接近与简支梁。 例: 中间支杆的刚度系数为k,求结点B的竖向位移?EI=C
结构力学——5力法

系数行列式之值>0 主系数 ii 0
0 副系数 ij 0 0
5)最后内力
M M 1 X 1 M 2 X 2 .......... ... M n X n M
返回
P
作业: 第106页 5-1(a)、(b)(c)、 (f)、 (g)、(i)、 (j) 5-2 (a)、(b)(c)
静力特性
非荷载外因的影响
内力与刚度的关系
无关
返回
6. 力法解超静定结构的思路 首先以一个简单的例子,说明力法的思路和基本概 念。讨论如何在计算静定结构的基础上,进一步寻求计 算超静定结构的方法。 1判断超静定次数: n=1 2. 选择基本体系(结构) 3写出变形(位移)条件:
(a)
EI 原体系(原结构)
返回
(1)对称结构作用对 称荷载
11X1+12X2+△1P=0 21X1+22X2+△2P=0 33X3+△3P=0
MP图是正对称的,故△3P=0。 X3=0 。 则
返回
(1)力法方程的物理意义为: 基本结构在全部多余 未知力和荷载共同作用下,基本结构沿多余未知力方向 上的位移,应与原结构相应的位移相等。 (2)系数及其物理意义: 下标相同的系数 i i 称为主系数(主位移),它是单位 单独作用时所引起的沿其自身方向上 多余未知力 的位移,其值恒为正。 系数 i j(i≠j)称为副系数(副位移),它是单位多余未知力 单独作用时所引起的沿 Xi方向上的位移, 其值可能为正、为负或为零。据位移互等定理,有 i j= j i △i P称为常数项(自由项)它是荷载单独作用时所引起 的沿Xi方向的位移。其值可能为正、为负或为零。 返回 上述方程的组成具有规律性,故称为力法典型方程。
计算结构超静定次数的公式

计算结构超静定次数的公式
结构超静定次数(SDOF,即单自由度系统)是一种描述动力学特性的重要工程
物理指标,它是对结构特性的重要衡量指标,也是在设计结构时明确可能受到的外力的一种有用的参考。
由于结构超静定次数的重要性,因此非常重要的就是计算每个结构的SDOF,即计算结构超静定次数的公式。
一般情况下,结构超静定次数的公式可分为定位法和统计法。
定位法的公式是:SDOF= 1/k+1/c+1/m,这里K为模态弹性系数,C为模态阻尼系数,M为模态质量系数。
统计法的公式涉及谱强度概率计算等方法,是一种自动计算方式,该方法可以精确地表达自动除去局部谐振的自激阻尼的系统的超静定次数,从而得出结构超静定次数。
尽管定位法和统计法都具有计算精确、效率高的优势,但由于计算结构超静定
次数时涉及模态参数摸索和较为复杂的反向计算,所以在实施计算过程中往往需要考虑多个利益相关方的功能要求,以便在整个过程中取得最优折中结果。
因此,在实际应用中,一般更合理采用可靠的统计法,以得出满足实际要求的最优超静定次数。
总的来说,结构超静定次数的公式不仅对合理设计结构十分重要,也为了保证
在极端情况下结构的可靠性而设计有重要意义。
因此,在实施结构设计时应首先确定结构超静定次数,以保证结构稳定,安全可靠。
结构力学静定结构与超静定结构(建筑类)
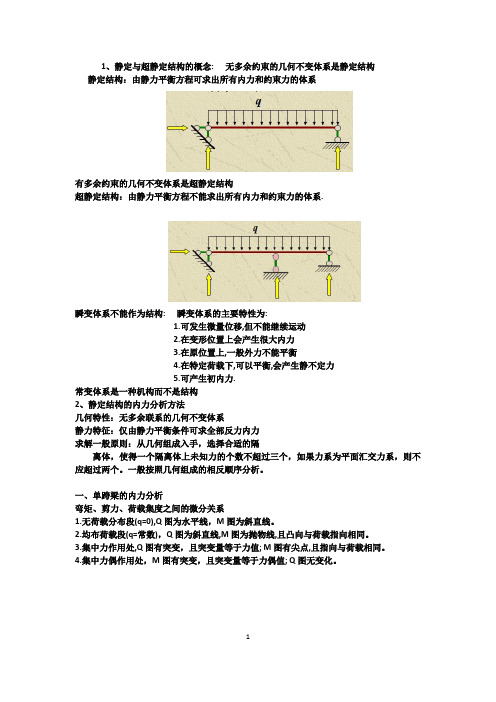
1、静定与超静定结构的概念:无多余约束的几何不变体系是静定结构静定结构:由静力平衡方程可求出所有内力和约束力的体系有多余约束的几何不变体系是超静定结构超静定结构:由静力平衡方程不能求出所有内力和约束力的体系.瞬变体系不能作为结构:瞬变体系的主要特性为:1.可发生微量位移,但不能继续运动2.在变形位置上会产生很大内力3.在原位置上,一般外力不能平衡4.在特定荷载下,可以平衡,会产生静不定力5.可产生初内力.常变体系是一种机构而不是结构2、静定结构的内力分析方法几何特性:无多余联系的几何不变体系静力特征:仅由静力平衡条件可求全部反力内力求解一般原则:从几何组成入手,选择合适的隔离体,使得一个隔离体上未知力的个数不超过三个,如果力系为平面汇交力系,则不应超过两个。
一般按照几何组成的相反顺序分析。
一、单跨梁的内力分析弯矩、剪力、荷载集度之间的微分关系1.无荷载分布段(q=0),Q图为水平线,M图为斜直线。
2.均布荷载段(q=常数),Q图为斜直线,M图为抛物线,且凸向与荷载指向相同。
3.集中力作用处,Q图有突变,且突变量等于力值; M图有尖点,且指向与荷载相同。
4.集中力偶作用处,M图有突变,且突变量等于力偶值; Q图无变化。
内力计算的关键在于:正确区分基本部分和附属部分. 熟练掌握单跨梁的计算.单体刚架(联合结构)的支座反力(约束力)计算方法:切断约束,取一个刚片为隔离体,假定约束力的方向,由隔离体的平衡建立三个平衡方程。
四.刚架弯矩图的绘制做法:拆成单个杆,求出杆两端的弯矩,按与单跨梁相同的方法画弯矩图. 分段定点连线六.由做出的剪力图作轴力图做法: 逐个杆作轴力图,利用结点的平衡条件,由已知的杆端剪力和求杆端轴力,再由杆端轴力画轴力图.注意:轴力图画在杆件那一侧均可,必须注明符号和控制点竖标.。
超静定结构计算力法
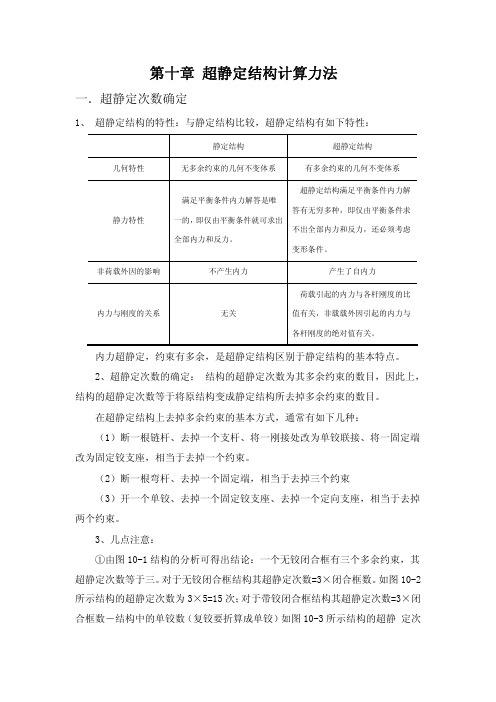
第十章超静定结构计算力法一.超静定次数确定1、 超静定结构的特性:与静定结构比较,超静定结构有如下特性:静定结构 超静定结构 几何特性 无多余约束的几何不变体系 有多余约束的几何不变体系静力特性满足平衡条件内力解答是唯一的,即仅由平衡条件就可求出全部内力和反力。
超静定结构满足平衡条件内力解答有无穷多种,即仅由平衡条件求不出全部内力和反力,还必须考虑变形条件。
非荷载外因的影响 不产生内力 产生了自内力内力与刚度的关系 无关荷载引起的内力与各杆刚度的比值有关,非载载外因引起的内力与各杆刚度的绝对值有关。
内力超静定,约束有多余,是超静定结构区别于静定结构的基本特点。
2、超静定次数的确定: 结构的超静定次数为其多余约束的数目,因此上,结构的超静定次数等于将原结构变成静定结构所去掉多余约束的数目。
在超静定结构上去掉多余约束的基本方式,通常有如下几种:(1)断一根链杆、去掉一个支杆、将一刚接处改为单铰联接、将一固定端改为固定铰支座,相当于去掉一个约束。
(2)断一根弯杆、去掉一个固定端,相当于去掉三个约束(3)开一个单铰、去掉一个固定铰支座、去掉一个定向支座,相当于去掉两个约束。
3、几点注意:①由图10-1结构的分析可得出结论:一个无铰闭合框有三个多余约束,其超静定次数等于三。
对于无铰闭合框结构其超静定次数=3×闭合框数。
如图10-2 所示结构的超静定次数为3×5=15次;对于带铰闭合框结构其超静定次数=3×闭合框数-结构中的单铰数(复铰要折算成单铰)如图10-3所示结构的超静 定次数为3×5-(1+1+3)=15次。
D点是连接四个刚片的复铰,相当于(4-1)=3个单铰。
②一结构的超静定次数是确定不变的,但去掉多余约束的方式是多种多样的。
如图10-1结构。
③在确定超静定次数时,要将内外多余约束全部去掉。
如图10-4结构外部1次超静定,内部6次超静定,结构的超静定次数是7。
超静定结构内力计算
六超静定结构內力计算1.什么是超静定结构?它和静定结构有何区别?答:单靠静力平衡条件不能确定全部反力和內力的结构为超静定结构。
从几何组成的角度看,静定结构是没有多余约束的几何不变体系。
若去掉其中任何一个约束,静定结构即成为几何可变体系。
也就是说,静定结构的任何一个约束,对维持其几何不变性都是必要的,称为必要约束。
对于超静定结构,若去掉其中一个甚至多个约束后,结构仍可能是几何不变的。
2.什么是超静定结构的超静定次数?答:超静定结构多余约束的数目,或者多余约束力的数目,称为结构的超静定次数。
3.超静定结构的基本结构是否必须是静定结构?答:超静定结构的基本结构必须是静定结构。
4.如何确定超静定结构的超静定次数?答:确定结构超静定次数的方法是:去掉超静定结构的多余约束,使之变为静定结构,则去掉多余约束的个数,即为结构的超静定次数。
5.撤除多余约束的方法有哪几种?答:撤除多余约束常用方法如下:(1)去掉一根支座链杆或切断一根链杆,等于去掉一个约束。
(2)去掉一个固定铰支座或拆去一个单铰,等于去掉两个约束。
(3)去掉一个固定端支座或把刚性连接切开,等于去掉三个约束。
6.用力法计算超静定结构的基本思路是什么?答:用力法计算超静定结构的基本思路是:去掉超静定结构的多于约束,代之以多余未知力,形成静定的基本结构;取多余未知力作为基本未知量,通过基本结构的位移谐调条件建立力法方程,利用这一变形条件求解多余约束力;将已知外荷载和多余约束力所引起的基本结构的内力叠加,即为原超静定结构在荷载作用下产生的内力。
7.什么是力法的基本结构和基本未知量?答:力法的基本结构是:超静定结构去掉多余约束后得到的静定结构。
力法的基本未知量是对应于多余约束的约束反力。
8.简述n次超静定结构的力法方程,及求原结构的全部反力和內力的方法。
答:(1)n次超静定结构的力法方程对于n次超静定结构,撤去n个多余约束后可得到静定的基本结构,在去掉的n个多余约束处代以相应的多余未知力。
1、静定结构与超静定结构静力计算公式
静定结构与超静定结构静力常用计算公式一、短柱、长柱压应力极限荷载计算公式1、短柱压应力计算公式荷载作用点轴方向荷载AF =σbhF =σ偏心荷载)1(21xY i ye A F W M A F -=-=σ)1(22xY iye A F WM A F +=+=σ)61(2,1h e bh F ±=σ偏心荷载)1(22xy yx x x y Y iye ixe AF I x M I x M AF ±±=⨯±⨯±=σ)661(be he bhF y x ±±=σ长短柱分界点如何界定?2、长柱方程式及极限荷载计算公式 支座形式图 示方 程 式极限荷载 一般式 n=1两端铰支 β=1y a dxy d ∙=222axB ax A y sin cos +=y F M EIF a∙==,2EI ln 222πEI l22π一端自由他端固定β=2y a dxy d ∙=222axB ax A y sin cos +=EI ln 2224)12(π-EI l224πy F M EIF a∙==,2两端固定 β=0.50)(22=-+FM y a dxy d AFM ax B ax A y A++=sin cosAMy F M EIF a+∙-==,2EI l224πEI l224π一端铰支他端固定 β=0.75)(222x l EIQ y a dxyd -=∙+)(sin cos x l FQ ax B ax A y -++=水平荷载-=Q EIF a,2——EIl227778.1π注:压杆稳定临界承载能力计算公式:EIl P cr 22)(βπ=二、单跨梁的反力、剪力、弯矩、挠度计算公式 1、简支梁的反力、剪力、弯矩、挠度计算公式荷载形式M 图V 图反力 2F R R B A ==L Fb R A =LFa R B =2qL R R B A ==4qL R R B A ==剪力V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B弯矩4maxFL M=LFab M=max82maxqL M=122maxqL M=挠度EIFL483max =ω若a >b 时,3)2(932max ab a EILFb +=ω(在)2(3b a a x +=处)EIqL84max =ωEIqL1204max =ω注:1、弯矩符号以梁截面下翼缘手拉为正(+),反之为负(—)。
材料力学第五版课件 主编 刘鸿文 第六章 简单的超静定问题
例题: 试判断下图结构是静定的还是超静定的?若是超静定, 则为几次超静定?
B
DE
A
C
FP
(a)静定。 未知内力数:3 平衡方程数:3
B
D
A
C
F
P
(b)超静定。 未知力数:5 平衡方程数:3 静不定次数=2
(c)静不定。
未知内力数:3
平衡方程数:2
FP
静不定次数=1
静不定问题的解法: (1)建立静力平衡方程; (2)由变形协调条件建立变形协调方程; (3)应用物理关系,代入变形协调方程,得到补充方程;
基本静定基的选取:
(1)解除B支座的约束,以约束反力
代替,即选择一端固定一端自由
的悬臂梁作为基本静定基。
(2)解除A端阻止转动的约束,以 约束反力代替,即选择两端简支 的梁作为基本静定基。
基本静定基选取可遵循的原则:
(1) 基本静定基必须能维持静力平衡,且为几何不变系统; (2) 基本静定基要便于计算,即要有利于建立变形协调条
E3 A3
F FN3 = 1+ 2E1 A1 cos3 a
E3 A3
(拉力) (拉力)
温度应力和装配应力
一、温度应力
在超静定结构中,由于温度变化引起的变形受到约束的限制, 因此在杆内将产生内力和应力,称为温度应力和热应力。
杆件的变形 ——
由温度变化引起的变形 温度内力引起的弹性变形
例:阶梯钢杆的上下两端在T1=5℃时被固 定,上下两段的面积为
=-
[13EI
32(1+
24
I Al
2
)
]
M
M
A
C
B D
l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静定结构与超静定结构静力常用计算公式一、短柱、长柱压应力极限荷载计算公式1、短柱压应力计算公式荷载作用点轴方向荷载AF =σbhF =σ偏心荷载)1(21xYi ye A F W M A F -=-=σ)1(22xYi ye AF WM A F +=+=σ)61(2,1h e bhF ±=σ偏心荷载)1(22xyyxx xy Yi ye i xe AF I xMI xMAF ±±=⨯±⨯±=σ)661(be he bhF y x ±±=σ长短柱分界点如何界定?2、长柱方程式及极限荷载计算公式 支座形式图 示方 程 式极限荷载 一般式 n=1两端铰支β=1ya dxyd∙=222axB ax A y sin cos +=yF M EI F a∙==,2EIln 222πEIl22π一端自由他端固定 β=2yadxyd∙=222axB ax A y sin cos +=EIln 2224)12(π-EIl224πyF M EIF a∙==,2两端固定 β=0.5)(22=-+FM y a dxydAFM ax B ax A y A++=sin cosAMy F M EI F a+∙-==,2EIl224πEIl224π一端铰支他端固定 β=0.75)(222x l EIQ y adxyd-=∙+)(sin cos x l FQ ax B ax A y -++=水平荷载-=Q EIF a,2——EIl227778.1π注:压杆稳定临界承载能力计算公式:EIl P cr22)(βπ=二、单跨梁的反力、剪力、弯矩、挠度计算公式 1、简支梁的反力、剪力、弯矩、挠度计算公式荷载形式M 图V 图反力 2F R R B A ==L Fb R A =LFa R B =2qL R R B A ==4qL R R B A ==剪力V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B弯矩4maxFL M=LFab M=max82maxqL M=122maxqL M=挠度EIFL483max =ω若a >b 时,3)2(932max ab aEILFb +=ω(在)2(3b a a x+=处)EIqL84max =ωEIqL1204max =ω注:1、弯矩符号以梁截面下翼缘手拉为正(+),反之为负(—)。
2、剪力符号以绕梁截面顺时针方向为正(+),反之为负(—)。
2、悬臂梁的反力、剪力、弯矩、挠度计算公式荷载形式M 图 V 图反力 R B =F R B =-F R B =qL R B =qa 剪力 V B =-R B V B =-R B V B =-R BV B =-R B弯矩M B =-FLM B =-Fb221qLMB-=)2(2a L qa MB--=挠度EIFLA33=ω)3(62b L EIFbA-=ωEIFLA84=ω)43(24434b L b L EIq A +-⨯=ω3、外伸梁的反力、剪力、弯矩、挠度计算公式荷载形式M 图 V 图反力)1(La F R A +=LFa R B -=)32(2La F R A +=LFa R B 23-=2)1(2La qL R A +=)1(222La qL R B +=)683(822La La qL R A ++=)65(822La qL R B -=剪力V A 左= - F V B = - R B V A 左= - F V A 右= - R B V A 左= - qa V A 右=R A -qa V B = - R BV A 左= - qa V A 左=)65(822La qL -弯矩M max =-FaM A =-Fa M B =Fa /222qa MA-=)21(822222La qL Mqa MBA--=-=挠度)(32max a L EIFa+=ωEIFaLa L EIFa C 27)43(122max -=+=ωω)34(24323a La L EIqa C ++-⨯=ω)66(48323a LaL EIqa C ++-⨯=ω4、一端固定、一端简支梁de 反力、剪力、弯矩、挠度计算公式荷载形式M 图 V 图反力)3(222Lb L Fb R A -=)3(222LaLFa R B -=R A =R B =qL21qLR qLR B A 8583==剪力V A =R A V B =-R B)21(2Lx qL V x -=V A =R A V B =-R B弯矩)3(222maxLb LFab M-=M A =M B =-122qLM 中=2241qL 2max1289qLM=挠度 ——EIqL384max 4=ωEIqL 4max 00542.0=ω三、等截面等跨连续梁的弯矩、剪力、挠度计算系数及公式1、二等跨连续梁的弯矩、剪力、挠度计算系数及公式荷载图示弯矩系数K M 剪力系数K V 挠度系数K ωM 1中 M B 支 V A V B 左、V B 右 ω1中 静 载活载最大活载最小 0.070 0.096 -0.032 -0.125-0.125—— 0.375 0.437 —— -0.6250.625 -0.6250.625 —— 0.521 0.192 -0.391 静 载活载最大活载最小 0.156 0.203 -0.047 -0.188-0.188—— 0.312 0.406 —— -0.688 0.688 -0.688 0.688 —— 0.9111.497-0.586 静 载活载最大活载最小0.222 0.278 -0.084 -0.3330.333——0.667 0.833 —— -1.333 1.333 -1.333 1.333 —— 1.4662.508-1.042注:1、均布荷载作用下:2qLKM M=,qL K V V =,EI qLK 1004ωω=; 集中荷载作用下:FLKMM=,FK VV =,EIFLK 1003ωω=;2、支座反力等于该支座左右截面剪力的绝对值之和;3、求跨中负弯矩及反挠度时,可查用上表“活载最小”一项的系数,但也要与静载引起的弯矩(或挠度)相组合。
4、求跨中最大正弯矩及最大挠度时,该跨应满布活荷载,相邻跨为空载;求支座最大负弯矩及最大剪力时,该支座相邻两跨应满布荷载,即查用上表中“荷载最大”一项的系数,并与静载引起的弯矩(剪力或挠度)相组合。
2、三等跨连续梁的弯矩、剪力、挠度计算系数及公式荷 载 图 示弯矩系数K M剪力系数K V 挠度系数K ωM 1中M 2中M B 支V A V B 左、V B 右ω1中 ω2中静 载活载最大活载最小0.0800.101-0.0250.0250.075-0.050-0.100-0.1770.017-0.4000.450——-0.600 0.500 -0.617 0.583 ——0.6770.990-0.3130.0520.677-0.625静 载活载最大活载最小0.1750.213-0.0380.1000.175-0.075-0.150-0.1750.0250.3500.425——-0.650 0.500 -0.675 0.625 ——1.1461.615-0.4690.2081.146-0.937注:1、2、3条同上述二等跨连续梁;4、求某跨的跨中最大正弯矩及最大挠度时,该跨应满布活荷载,其余每隔一跨满布活荷载;求某支座的最大负弯矩及最大剪力时,该支座相邻两跨应满布活荷载,其余每隔一跨满布活荷载,即查上表中“活载最大”一项的系数,并与静载引起的弯矩(剪力或挠度)相组合。
3、四等跨连续梁的的弯矩、剪力、挠度计算系数及公式荷载图示 弯矩系数K M剪力系数K V 挠度系数K ω M 1中M 2中M B 支M C 支V AV B 左、V B 右 V c 左、V c 右ω1中ω2中见 图 a 静 载活载最大活载最小 0.0770.1000.023 0.0360.0810.045 -0.107-0.1210.013 -0.071-0.1070.018 0.3930.446 —— -0.607 0.536 -0.620 0.603 —— -0.464 0.464 -0.571 0.571 —— 0.6320.967-0.307 0.1860.660-0.588 见 图 b 静 载活载最大活载最小0.1690.2100.0400.1160.183-0.067-0.161-0.1810.020-0.107-0.1610.0200.3390.420 ——-0.661 0.554 -0.681 0.654 ——-0.446 0.446 -0.607 0.607 ——1.0791.581-0.4600.4091,121-0.711注:事项同三跨连续梁。
四、不等跨连续梁在均布荷载作用下的弯矩、剪力计算系数及公式 1、二跨不等跨连续梁的弯矩、剪力计算系数及公式荷载简图计算公式弯矩M=表中系数×q L 12(KN ·m ) 剪力V=表中系数×q L 1(KN )静载时活载最不利布置时n M1M2M B最大V A V B左最大V B右最大Va M1最大M2最大V A最大V C最大1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.81.92.0 2.25 2.5 0.0700.0650.0600.0530.0470.0400.0330.0260.0190.0130.0080.003——0.0700.0900.1110.1330.1570.1830.2090.2370.2670.2980.3300.4170.513-0.125-0.139-0.155-0.175-0.195-0.219-0.245-0.274-0.305-0.339-0.375-0.477-0.5940.3750.3610.3450.3260.3050.2810.2550.2260.1950.1610.1250.023-0.094-0.625-0.639-0.655-0.674-0.695-0.719-0.745-0.774-0.805-0.839-0.875-0.976-1.0940.6250.6760.7290.7840.8390.8960.9531.0111.0691.1281.1881.3371.488-0.375-0.424-0.471-0.516-0.561-0.604-0.647-0.689-0.731-0.772-0.813-0.913-1.0130.0960.0970.0980.0990.1000.1010.1020.1030.1040.1040.1050.1070.1080.0960.1140.1340.1560.1790.2030.2290.2560.2850.3160.3470.4330.5270.4330.4400.4430.4460.4480.4500.4520.4540.4550.4570.4580.4620.464-0.438-0.476-0.518-0.558-0.598-0.638-0.677-0.716-0.755-0.794-0.833-0.930-1.0272、三跨不等跨连续梁的弯矩、剪力计算系数及公式荷载简图计算公式弯矩M=表中系数×q L12(KN·m)剪力V=表中系数×q L1(KN)静载时活载最不利布置时n M1M2M B支V A V B 左V B右M1最大M2最大M B最大V A最大V B左最大V B右最大0.4 0.5 0.6 0.7 0.80.91.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.81.92.0 2.25 2.5 0.0870.0880.0880.0870.0860.0830.0800.0760.0720.0660.0610.0550.0490.0430.0360.0300.0240.0110.002-0.063-0.049-0.035-0.021-0.0060.0100.0250.0410.0580.0760.0940.1130.1330.1530.1740.1960.2190.2790.344-0.083-0.080-0.080-0.082-0.086-0.092-0.100-0.110-0.122-0.136-0.151-0.163-0.187-0.203-0.231-0.255-0.281-0.354-0.4330.4170.4200.4200.4130.4140.4080.4000.3900.3780.3650.3490.3320.3130.2920.2690.2450.2190.1460.063-0.583-0.580-0.580-0.582-0.586-0.592-0.600-0.610-0.622-0.363-0.651-0.663-0.687-0.708-0.731-0.755-0.781-0.854-0.9380.2000.2500.3000.3500.4000.4500.5000.5500.6000.6500.7000.7500.8000.8500.9000.9501.0001.1251.2500.0890.0920.0940.0960.0980.1000.1010.1030.1040.1050.1060.1070.1070.1080.1090.1090.1100.1110.1120.0150.0220.0310.0400.0510.0630.0750.0890.1030.1180.1340.1510.1690.1880.2030.2290.2500.3070.370-0.096-0.095-0.095-0.098-0.102-0.108-0.117-0.127-0.139-0.152-0.168-0.185-0.204-0.224-0.247-0.271-0.297-.0369-0.4520.4220.4290.4340.4390.4430.4470.4500.4530.4550.4580.4600.4620.4630.4650.4660.4680.4690.4710.474-0.596-0.595-0.595-0.593-0.602-0.608-0.617-0.627-0.639-0.652-0.668-0.635-0.704-0.724-0.747-0.771-0.797-0.869-0.9520.4610.4500.4600.4830.5120.5460.5830.6230.6650.7080.7530.7980.8430.8900.9370.9851.0311.1511.272五、双向板在均布荷载作用下的弯矩、挠度计算系数及公式四边固定板的弯矩、挠度计算系数及公式简图L x/L yωM x M y M x o M o yM o x —固定边中点沿L x方向的弯矩;M o y —固定边中点沿L y 方向的弯矩;0.50 0.55 0.60 0.65 0.70 0.75 0.80 0.85 0.90 0.95 1.00 0.00253 0.00246 0.00236 0.00224 0.00211 0.00197 0.00182 0.00168 0.00153 0.00140 0.00127 0.0400 0.0385 0.0367 0.0345 0.0321 0.0296 0.0271 0.0246 0.0221 0.0198 0.0176 0.0038 0.0056 0.0076 0.0095 0.0113 0.0130 0.0144 0.0156 0.0165 0.0172 0.0176 -0.0829 -0.0814 -0.0793 -0.0766 -0.0735 -0.0701 -0.0664 -0.0626 -0.0588 -0.0550 -0.0513 -0.0570 -0.0571 -0.0571 -0.0571 -0.0569 -0.0565 -0.0559 -0.0551 -0.0541 -0.0528 -0.0513注:1、挠度=表中系数cB qL4⨯;弯矩=表中系数2qL ⨯;式中L 取Lx 和Ly 中之较小者。