ADAS驾驶辅助系统测试方案-风丘科技
adas模型实验报告

adas模型实验报告ADAS模型实验报告摘要:本实验旨在使用ADAS模型对交通场景中的车辆进行智能驾驶决策。
通过对实验数据的收集和分析,我们评估了ADAS模型在不同交通场景下的性能,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
引言:随着自动驾驶技术的不断发展,ADAS(Advanced Driver Assistance Systems)模型已经成为智能驾驶系统的核心组成部分。
该模型通过对车辆周围环境的感知和分析,实现了对驾驶决策的智能化处理,从而提高了驾驶安全性和效率。
实验方法:本实验使用了一辆配备了ADAS模型的自动驾驶汽车,并在不同的交通场景下进行了测试。
我们收集了车辆感知和行为数据,并对其进行了分析。
通过对比实验数据和模型预测结果,我们评估了ADAS模型在不同交通场景下的性能表现。
实验结果:实验结果显示,ADAS模型在城市道路、高速公路和复杂交叉路口等不同交通场景下都表现出了良好的性能。
模型能够准确地感知周围车辆和行人,并做出相应的驾驶决策。
此外,我们还对模型进行了一些改进和优化,进一步提高了其性能。
讨论:通过本实验,我们发现ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
然而,该模型在复杂交通场景下仍然存在一些挑战,需要进一步的改进和优化。
未来,我们将继续深入研究ADAS模型,并探索其在自动驾驶技术中的更广泛应用。
结论:本实验对ADAS模型在交通场景中的性能进行了评估,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力,为智能驾驶技术的发展提供了有力的支持。
我们相信,通过不断地研究和创新,ADAS模型将在未来的智能驾驶系统中发挥越来越重要的作用。
ADAS开发及测试系统解决方案设计设计

ADAS开发及测试系统解决方案高级驾驶员辅助系统(ADAS) 作为实现车辆主动安全的关键系统,已经越来越多的配置到各种级别的乘用车和商用车上。
同时面对日益加强的法律法规,基于FAS-CAM( 前视主动安全摄像头) 的ADAS 解决方案将逐渐成为Euro-NCAP五星安全等级车辆的必须配置。
随着ADAS 控制器功能的增加,控制系统硬件、图像处理、算法策略、与整车其他子系统的交互越来越复杂,这将给开发过程和测试过程带来前所未有的挑战。
在汽车HIL 系统领域,针对新兴的ADAS 系统开发、测试的解决方案可以解决实车开发测试一致性差、效率低、周期长、成本昂贵、危险性高的弊端。
采用仿真技术的硬件在回路(HIL)测试系统在ADAS 系统开发、测试阶段可以很好的解决以下问题:•摄像头功能调试;•摄像头性能分析;•摄像头标定;•EuroNCAP 摸底测试;•场地试验;•控制策略验证;•网络通讯测试;•失效保护测试;•HMI 功能测试;•无人车控制算法的开发与测试。
ADAS开发及测试系统组成:外围系统测试内容•算法功能♦车道线偏离报警(LDW, Lane Departure Warning)♦前方碰撞预警(FCW, Forward Collision Warning)♦前方碰撞预警(FCW, Forward Collision Warning)♦智能大灯控制(IHC, Intelligence Headlamp Control)♦限速标志识别(TSR/SAS, Tra-c Sign Recognition, Speed Assist System) ♦自动紧急刹车(AEB/AEBP, Autonomous Emergency Braking)♦自适应巡航(ACC, Adaptive Cruise Control)♦自适应巡航(ACC, Adaptive Cruise Control)•系统功能♦针对Euro-NCAP的虚拟场地测试♦针对Euro-NCAP的虚拟场地测试♦失效保护测试♦系统网络性能测试解决方案服务内容:根据客户控制系统功能提供:•系统测试解决方案•搭建定制的HIL测试系统•提供完整的视频处理测试系统•提供ADAS控制器快速原型系统•用户控制器信号匹配(用户提供控制器)•车辆动力学模型参数化•CAN网络报文集成(用户提供DBC文件)•HMI demo开发•测试用例开发(基于Euro-NCAP不同星级标准)•提供工况素材•测试数据分析该方案的优势•采用世界领先的MobilEye®单目视觉解决方案•采用针对ADAS应用的世界领先的IPG车辆空力学模型•采用先进的自动代码生成技术的快速控制原型系统•可针对Euro-NCAP及其他标准进行评分测试•可进行针对SOP阶段的摄像头标定测试•支持外部视频注入,可实现全工况模拟•可进行HMI快速开发、测试、验证•支持人在环测试。
ADAS开发及测试方案
ADAS开发及测试方案先进驾驶辅助系统(Advanced Driver Assistance Systems)简称ADAS,是利用安装于汽车上的各种传感器,及时采集车内外的环境数据,进行静动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,并采取必要的动作,从而更好地保护乘客的安全,保障车辆及周围交通环境的安全。
随着ADAS系统的引入,汽车变得越来越智能,也极大地提升了车辆驾驶的安全性,因此ADAS也成为整车厂新的竞争利器。
ADAS的组成非常广泛,包括了夜视系统、主动巡航控制系统(ACC)、电子稳定程序(ESP)、随动转向前照灯(AFS)、车道偏移报警(LDW)、防碰撞技术(FCW)、盲点检测技术(BSD)以及泊车辅助技术(PLA)等。
ADAS系统的开发具有特殊性,除了遵从一般ECU的V模式开发流程外,由于ADAS系统的实时性非常重要,需要实时与不同类型的传感器进行数据交换(比如摄像头、激光雷达、雷达、车辆CAN总线、GPS等),而且需要方便的集成新的功能和算法,因此,ADAS系统的软件开发需要解决很多挑战,比如多线程编程、数据样本时戳和再同步、数据延时测量和预估,系统优化和性能评估、代码重用和软件应用维护等。
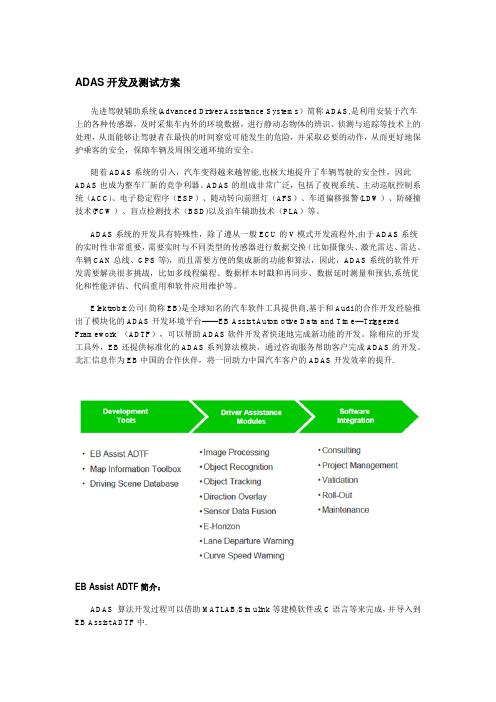
Elektrobit公司(简称EB)是全球知名的汽车软件工具提供商,基于和Audi的合作开发经验推出了模块化的ADAS开发环境平台——EB Assist Automotive Data and Time—Triggered Framework (ADTF),可以帮助ADAS软件开发者快速地完成新功能的开发。
除相应的开发工具外,EB还提供标准化的ADAS系列算法模块,通过咨询服务帮助客户完成ADAS的开发。
北汇信息作为EB中国的合作伙伴,将一同助力中国汽车客户的ADAS开发效率的提升.EB Assist ADTF简介:ADAS 算法开发过程可以借助MATLAB/Simulink等建模软件或C语言等来完成,并导入到EB Assist ADTF中.EB Assist ADTF能够从不同的源获取并同步数据,包含不同类型的传感器数据并且同步和不同总线数据(LIN、MOST、CAN和FlexRay)的交互。
一种基于车载摄像头的ADAS功能测试系统[实用新型专利]
![一种基于车载摄像头的ADAS功能测试系统[实用新型专利]](https://img.taocdn.com/s3/m/af467751cbaedd3383c4bb4cf7ec4afe04a1b1a5.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202020333659.X(22)申请日 2020.03.17(73)专利权人 中汽数据(天津)有限公司地址 300380 天津市西青区中北镇万卉路3号新城市中心B座12-17室(72)发明人 王磊 陈超 宝鹤鹏 赵帅 杨磊 纪东方 仝湘媛 袁悦 (74)专利代理机构 天津企兴智财知识产权代理有限公司 12226代理人 陈雅洁(51)Int.Cl.G05B 23/02(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种基于车载摄像头的ADAS功能测试系统(57)摘要本实用新型提供了一种基于车载摄像头的ADAS功能测试系统,包括黑箱;黑箱内设有车载摄像头和显示器;车载摄像头镜头与显示器屏幕相对设置;黑箱外设有一号PC机和二号PC机;车载摄像头与二号PC机的I/O接口连接,二号PC机与一号PC机通过串口UPD通信连接,一号PC机的I/O接口与显示器连接;车载摄像头及显示器均设有高度调节支架。
本实用新型一种基于车载摄像头的ADAS功能测试系统配合使用黑箱、车载摄像头、显示器、一号PC机和二号PC机,搭建适用于所有ADAS的功能测试系统;可以无需调整黑箱内的设备,不依赖于ECU,具有适用范围广、操作便捷以及测试效果好的特点。
权利要求书1页 说明书4页 附图1页CN 212135223 U 2020.12.11C N 212135223U1.一种基于车载摄像头的ADAS功能测试系统,其特征在于:包括黑箱;所述黑箱内设有车载摄像头和显示器;所述车载摄像头镜头与所述显示器屏幕相对设置;所述黑箱外设有一号PC机和二号PC机;所述车载摄像头与所述二号PC机的I/O接口连接,所述二号PC机与所述一号PC机通过串口UPD通信连接,所述一号PC机的I/O接口与所述显示器连接;所述车载摄像头及所述显示器均设有高度调节支架;所述二号PC机用于安装待测试的ADAS系统;所述一号PC机是用来仿真车辆运行情况和道路场景;所述显示器用来显示车辆运行前方画面。
CAN FD一致性测试:便捷、高效的自动化测试系统
CAN FD一致性测试:便捷、高效的自动化测试系统引言:后起之秀——CAN FD:随着各个行业的快速发展,消费者对汽车电子智能化的诉求越来越强烈,这使得整车厂将越来越多的电子控制系统加入到了汽车控制中,且在传统汽车、新能源汽车、ADAS和自动驾驶等汽车领域中也无不催生着更高的需求,可见传统CAN总线已明显无法满足了。
由此,在带宽与可靠性方面更为优异的“升级版”CAN——CAN FD应运而生。
(图1 自动化测试系统)一什么是“一致性测试”一致性测试是用来检测零部件是否符合相关标准的测试流程,可保证产品的质量。
在CAN FD网络中,各节点的质量不一致可能会引发网络故障或网络瘫痪等问题,因此为了保证CAN FD网络的正常安全运行,执行CAN FD的一致性测试非常必要。
二CAN FD一致性测试的标准及内容如果要对CAN FD网络进行一致性测试,就需遵循以下测试标准。
一致性测试标准:•ISO 11898;•ISO 16845;•ISO 15765;•整车厂标准。
根据以上的测试标准,可将CAN FD一致性测试内容分为:•物理层一致性测试;•数据链路层一致性测试;•应用层一致性测试。
| 物理层一致性测试物理层一致性测试主要是对CAN FD网络节点的电阻特性、电容特性和总线终端电阻以及CAN FD物理电平值等的测试,旨在验证CAN FD节点与系统在电路设计、物理电平和容错性方面的性能。
CAN FD物理层一致性测试的内容如下表所示(节选):(图2 CAN FD物理层一致性测试的内容)测试项——终端电阻测试:在CAN FD网络中,需确保电缆的阻抗保持连续性,如此才能有效消除在通信电缆中的信号反射。
因此,在设计网络拓扑结构的过程中,CAN FD总线末端会接120Ω的终端电阻,以此来抑制反射。
终端电阻的阻值必须在ISO 11898标准所规定的118~132Ω范围内。
过大过小的阻值都会对CAN FD通信产生不利影响——阻值过小,会造成信号幅值偏小,从而影响信号识别,通信极不稳定;阻值过大,造成信号幅值偏大,出现信号过冲现象,导致信号下降沿(变缓)时间变长,从而产生位(宽度)识别错误。
adas测试用例方法

adas测试用例方法引言自动驾驶辅助系统(ADAS)是现代汽车中的重要组成部分,它利用传感器和算法来辅助驾驶员进行安全驾驶。
ADAS测试是确保自动驾驶辅助系统稳定正常工作的重要环节。
本文将介绍一些常用的ADAS测试用例方法,以帮助开发人员设计和测试自动驾驶辅助系统。
二级标题1:传感器测试传感器是ADAS系统的核心组成部分,包括摄像头、雷达和激光雷达等。
下面是一些常见的传感器测试用例方法:三级标题1:传感器定标测试1.测试摄像头的分辨率和畸变:通过放置特定模式的标定板测试摄像头的分辨率和畸变情况。
2.测试雷达的探测范围和分辨率:使用不同距离和速度的目标物体进行测试,以评估雷达的探测范围和分辨率。
3.测试激光雷达的角度测量误差:通过将激光雷达安装在旋转平台上,测试其角度测量的误差情况。
三级标题2:传感器故障测试1.模拟摄像头故障:关闭或模拟摄像头的故障情况,如图像模糊或摄像头无法工作,以测试ADAS系统的可靠性。
2.模拟雷达信号干扰:在雷达传感器周围放置电磁干扰源,以模拟雷达信号受干扰的情况,测试ADAS系统对干扰的适应能力。
3.模拟激光雷达故障:关闭或模拟激光雷达的故障情况,如激光测距失败或激光束发散,以测试ADAS系统的容错性。
二级标题2:算法测试ADAS系统中的算法主要负责传感器数据的处理和决策。
以下是一些常见的算法测试用例方法:三级标题1:目标检测与跟踪测试1.测试目标检测算法的准确性:使用不同类型和尺寸的目标物体进行测试,评估目标检测算法的识别准确率和误检率。
2.测试目标跟踪算法的鲁棒性:在目标跟踪过程中模拟目标遮挡或突然消失的情况,测试算法的鲁棒性和恢复能力。
三级标题2:路径规划与控制测试1.测试路径规划算法的准确性:使用不同地理环境和障碍物场景进行测试,评估路径规划算法的路径选择准确性和安全性。
2.测试控制算法的稳定性和响应性:在不同车辆速度和路况下进行测试,评估控制算法对输入的稳定性和响应速度。
adas实验报告
adas实验报告ADAS实验报告引言自动驾驶辅助系统(ADAS)作为一项新兴技术,正在引起越来越多的关注。
本实验旨在探索ADAS在车辆安全性和驾驶体验方面的潜力,并评估其在现实道路环境中的表现。
实验设计为了评估ADAS系统的性能,我们选择了一辆配备了最新ADAS技术的汽车进行测试。
实验过程中,我们设置了不同的道路场景,包括高速公路、城市道路和山区道路,以模拟真实驾驶环境。
我们还采集了大量的数据,包括车辆行驶速度、距离、制动反应时间等,以便对ADAS系统进行全面的分析。
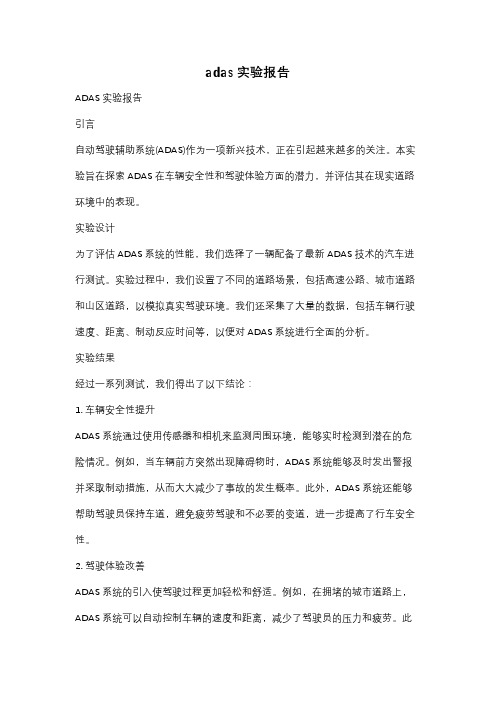
实验结果经过一系列测试,我们得出了以下结论:1. 车辆安全性提升ADAS系统通过使用传感器和相机来监测周围环境,能够实时检测到潜在的危险情况。
例如,当车辆前方突然出现障碍物时,ADAS系统能够及时发出警报并采取制动措施,从而大大减少了事故的发生概率。
此外,ADAS系统还能够帮助驾驶员保持车道,避免疲劳驾驶和不必要的变道,进一步提高了行车安全性。
2. 驾驶体验改善ADAS系统的引入使驾驶过程更加轻松和舒适。
例如,在拥堵的城市道路上,ADAS系统可以自动控制车辆的速度和距离,减少了驾驶员的压力和疲劳。
此外,ADAS系统还提供了自适应巡航控制功能,可以根据前车的速度自动调整车辆的速度,使驾驶过程更加平稳。
3. 技术挑战和改进空间尽管ADAS系统在提高车辆安全性和驾驶体验方面取得了显著进展,但仍然存在一些挑战和改进的空间。
首先,ADAS系统对于复杂的道路环境和极端天气条件的适应性还有待提高。
其次,ADAS系统的准确性和响应时间也需要进一步优化,以确保驾驶员在关键时刻能够及时采取行动。
结论ADAS系统作为一项新兴技术,具有巨大的潜力来提高车辆安全性和驾驶体验。
本实验通过对ADAS系统在不同道路场景下的测试,验证了其在车辆安全性和驾驶体验方面的优势。
然而,我们也应该意识到ADAS技术仍然处于不断发展和完善的阶段,需要不断的研究和改进,以满足日益增长的安全和便利性需求。
BMS测试方案-风丘科技

Project
支持Matlab/Simulink模型 X-Manager负责配置、编译、下载
Tester
X-Handler 可配置的测试工具
Automation Test
Mx-Suite 测试系统管理工具 支持基于LabVIEW 搭建图形化界面 扩展FIU测试 - WIND HILL FIU 扩展MCD测试 - MCD ToolBox & Softing DTS
Mx-Suite ECU-TEST
FIU
MCD
CLIB Client
TCP/IP
Target Plant Model CLIB Server
Linux OS IPC(PCI/PXI/CPCI) DUT
© 2016 北京风丘科技有限公司
8
特点
HOST - Target 架构
Windows OS – Linux OS (千兆LAN)
32bit 80MHz 16bit
WH2101
WH2102
80*AI
6*PWM_IN 2*PWM_IN (4*PWM_OUT) 16*AO
0~60V 0.5%
0~60V
WH1103
16*AO
WH2103
±12V/20mA
© 2016 北京风丘科技有限公司
5
通信&FIU板卡
通信板卡 WH2100 WH2101 WH2102 通道数量 2*HS_CAN 1*HS_CAN 1*LS_CAN 2*HS_CAN 1*LIN 主要参数
24通道故障注入模块 每通道电流500mA RS485和高速CAN总线通信 600V 通道对通道或通道对地隔离 可级连至120通道
adas测试方案

ADAS测试方案1. 引言自动驾驶辅助系统(ADAS)是一种基于车载传感器和计算机视觉技术的车辆辅助系统,可为驾驶员提供诸如自动刹车、智能巡航控制、车道保持辅助等功能。
为了确保ADAS的稳定性和性能,开发者需要设计一种有效的测试方案。
本文将介绍一个基本的ADAS测试方案,包括测试目标、测试环境、测试方法和测试评估指标等内容。
2. 测试目标ADAS测试的主要目标是验证系统的功能和性能。
具体目标包括: - 验证自动刹车功能是否可靠且符合安全要求 - 验证智能巡航控制功能是否准确地跟随车辆前方交通 - 验证车道保持辅助功能是否可以准确地识别和跟踪车道线 - 验证系统的灵敏度和响应时间是否符合要求3. 测试环境ADAS测试需要在真实道路上进行,以模拟真实驾驶场景。
测试环境应包括以下方面: - 道路条件:包括直线道路、弯道、上坡、下坡等多种道路类型 - 交通环境:包括其他车辆、行人、交通信号灯等 - 天气条件:包括晴天、雨天、夜晚等多种天气条件 - 驾驶场景:包括高速公路、城市道路、乡村道路等不同场景4. 测试方法4.1 功能测试功能测试是验证ADAS系统各项功能是否正常工作的基本测试。
测试方法包括以下步骤: 1. 自动刹车功能测试:在不同速度和距离下,模拟前方障碍物来测试自动刹车功能的触发和准确性。
2. 智能巡航控制功能测试:设定目标速度并在车辆前方引入不同速度的前车来测试系统的跟随和加减速控制功能。
3. 车道保持辅助功能测试:在不同的车道宽度和路况下,测试系统对车道线的识别和跟踪能力。
4. 紧急和危险情况测试:模拟紧急情况,如突然刹车或变道,测试系统的响应时间和动作准确性。
4.2 性能测试性能测试是验证ADAS系统的性能指标的测试。
测试方法包括以下步骤: 1. 系统响应时间测试:测试系统从检测到交通障碍物到触发相应功能所需的时间。
2. 跟随准确性测试:测试系统在各种速度下对前车的跟随精度和稳定性。
ADAS智能驾驶测试服务解决方案(优选.)
最新文件---------------- 仅供参考--------------------已改成-----------word文本 --------------------- 方便更改ADAS智能驾驶测试服务智能化是汽车技术发展的重要方向,智能驾驶技术是汽车进化的必由之路。
作为国内领先的汽车电子系统供应商,恒润科技在汽车智能驾驶技术方面也推出了测试咨询业务。
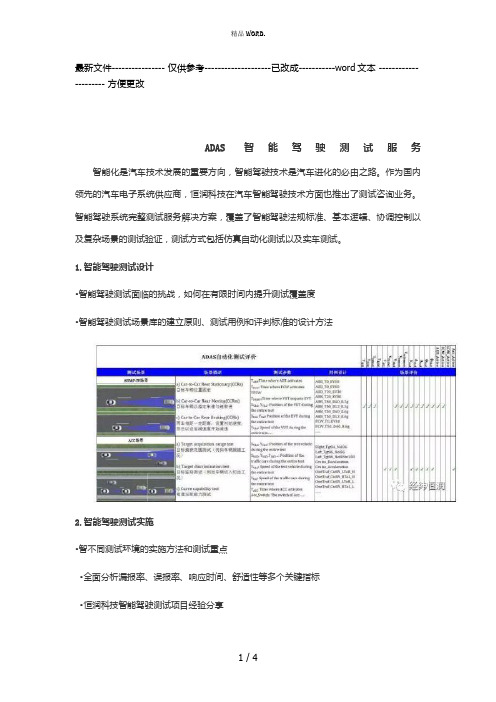
智能驾驶系统完整测试服务解决方案,覆盖了智能驾驶法规标准、基本逻辑、协调控制以及复杂场景的测试验证,测试方式包括仿真自动化测试以及实车测试。
1.智能驾驶测试设计•智能驾驶测试面临的挑战,如何在有限时间内提升测试覆盖度•智能驾驶测试场景库的建立原则、测试用例和评判标准的设计方法2.智能驾驶测试实施•智不同测试环境的实施方法和测试重点•全面分析漏报率、误报率、响应时间、舒适性等多个关键指标•恒润科技智能驾驶测试项目经验分享1)仿真测试危险工况测试极限工况测试复杂工况测试参数反复迭代测试2)场地测试法规标准场景定量测试自定义场景定量测试对标分析测试3)开放道路测试全部真实场景误报率、漏报率测试分析主观评价测试了解更多相关信息,欢迎点击“阅读原文”,报名参加8月ADAS及智能驾驶开发测试解决方案研讨会。
会议摘要随着越来越多的ADAS系统在车上装载,智能驾驶等级逐步提高,整车电子系统的复杂性也随之提高,伴随而来可靠性测试、验证工作需求也在激增。
恒润科技联合德国IPG Automotive GmbH公司(以下简称IPG公司)、美国国家仪器公司(以下简称NI公司)共同举办“ADAS及智能驾驶开发测试解决方案研讨会”,介绍ADAS及智能驾驶的整体解决方案、测试服务、雷达传感器回波解决方案及基于场景的ADAS虚拟测试。
会议亮点•恒润科技针对ADAS及智能驾驶的测试全方位解决方案,覆盖主流ADAS及智能驾驶传感器解决方案,助力您解决ADAS测试中的周期长、危险高、复现难的问题,将大幅度缩短开发和测试周期,提高测试迭代效率。
ADAS高级驾驶辅助系统极限测试效果报告
ADAS高级驾驶辅助系统极限测试效果报告1. 引言ADAS(Advanced Driver Assistance Systems)高级驾驶辅助系统作为汽车行业的一项创新技术,通过集成传感器、摄像头、雷达和计算机视觉等技术,为驾驶员提供全方位的主动安全辅助功能。
为了评估ADAS系统在极限测试下的性能表现,本文对该系统在不同场景下的极限测试结果进行详细报告。
2. 测试环境和设备本次测试使用了一辆搭载了ADAS系统的汽车,并在不同的道路状况、天气条件和速度下进行测试。
测试车辆配备了前置摄像头、毫米波雷达以及立体摄像头,这些设备为ADAS系统提供了准确的环境感知和障碍物检测能力。
3. 极限测试场景为了评估ADAS系统的性能,在测试过程中,我们选择了以下极限场景:3.1 高速公路紧急制动:在高速公路上,突然出现前方障碍物时,ADAS系统的紧急制动功能能否及时响应,并有效减少碰撞风险。
3.2 弯道超速预警:当驶入曲线道路,并以过高的速度行驶时,ADAS系统的超速预警功能是否能够准确预测潜在风险,及时提醒驾驶员减速。
3.3 前车碰撞预警:在城市道路行驶时,如果前方车辆突然减速,ADAS系统能否及时发出警告声,并帮助驾驶员避免追尾事故。
3.4 盲区监测:在变道时,ADAS系统的盲区监测功能是否准确识别盲区内的障碍物,并及时提醒驾驶员注意。
4. 测试结果和分析4.1 高速公路紧急制动:通过对ADAS系统在高速公路紧急制动场景下的测试,发现该系统能够及时响应并完成紧急制动操作。
在各种速度下,系统能够准确识别前方障碍物,并在短时间内完成制动,有效避免碰撞风险。
4.2 弯道超速预警:ADAS系统在弯道超速预警测试中表现出色。
无论天气条件如何,系统都能够准确预测潜在的风险,并通过声音和视觉警告提醒驾驶员减速,从而大大降低了驾驶员因超速导致的意外事故概率。
4.3 前车碰撞预警:通过在城市道路上模拟前车突然减速的测试情景,ADAS系统准确识别前方车辆的减速,及时发出警告声,并通过前置摄像头的目标跟踪功能帮助驾驶员避免追尾事故的发生。
新车碰撞评估测试为高级驾驶辅助系统(ADAS)建立安全评级
新车碰撞评估测试为高级驾驶辅助系统(ADAS)建立安全评级世界卫生组织指出每年的道路交通事故导致世界范围内超过120万人丢失生命。
道路交通事故也是15到29岁年轻人死亡的主要原因。
接近1/2的死者都是如摩托车驾驶人员、自行车骑行者和行人在内的极少安全保护设备从而易受伤害的道路使用者。
NCAPs(新车碰撞评估测试)通过车内假人碰撞测试对车辆碰撞保护进行评级以向消费者提供更安全的汽车,五星等级代表最高分。
全世界有九个NCAPs或类似NCAPs的机构。
虽然所有的NCAPs都使用星级来对汽车安全进行排序,但并非所有机构的五星等级都代表相同的安全级别。
高级驾驶辅助系统近年来,北美和欧洲的NCAPs开始在评级方案中引入或推广防撞技术。
在欧洲NCAP,只有汽车在碰撞保护(被动安全性)测试中全项表现优秀且车辆配备健全可靠的防碰撞技术才给予5星评级。
这些所谓的主动安全技术就是通过使用雷达、摄像头和激光雷达传感器等的高级驾驶辅助系统实现的。
NHTSA(美国国家公路交通安全管理局)最近提议5星安全评级应包括防碰撞评估和诸如行人保护的更先进的技术评估。
NHTSA计划在2018年在NCAP中实现这些改进并在2019年开始执行。
从2016年开始,欧洲NCAP把针对行人的AEB(自动紧急制动)技术纳入安全评级。
研究表明在乘用车上安装有效的行人检测系统可以减少五分之一的致命性行人碰撞事故。
作为世界范围内汽车安全系统的领导者,Autoliv在其2015年的投资者报告日提出,他们希望在2020年可以把汽车装上侧角和前雷达传感器,以及与雷达传感器和立体或单摄像头的协同工作机制,作为可以达到欧洲NCAP的五星评级标准。
在最大的消费电子展(CES)上,Autoliv 和Continental等汽车安全系统供应商展示了它们实现自动紧急制动功能的ADAS解决方案。
梅赛德斯•奔驰全新E系列在底特律车展上正式推出。
它的特点是安装有最新的驾驶辅助系统,比如智能领航、限速辅助、主动变道辅助和BAS制动辅助系统增强版。
主动安全adas试验方法_概述及解释说明

主动安全adas试验方法概述及解释说明1. 引言1.1 概述在汽车行业的不断发展中,主动安全技术(ADAS)作为关键的驾驶辅助系统被广泛应用。
ADAS能够通过传感器和计算机系统,监测和判断道路上的各项参数,并提供警告或主动干预来减少事故风险和改善驾驶体验。
然而,为了确保ADAS 系统的可靠性和性能,必须进行一系列严格、科学的试验方法。
本文旨在概述和解释主动安全ADAS试验方法,介绍它们的重要性以及常用的试验方法。
同时也将介绍实施这些试验方法所需的流程以及结果评估与优化措施。
1.2 文章结构本文共分为五个部分,分别是引言、ADAS试验方法概述、ADAS试验方法解释说明、ADAS试验实施流程以及结论与展望。
引言部分对整篇文章进行了基本介绍,并概括了各个部分内容。
ADAS试验方法概述部分将简单介绍ADAS的基本概念,并探讨进行ADAS试验的重要性。
此外,还会列举和说明一些常用的ADAS试验方法。
在ADAS试验方法解释说明部分,将对一些关键的ADAS试验方法进行详细解释。
这些方法包括传感器校准和验证测试、自动紧急制动系统测试以及车道保持辅助系统测试。
ADAS试验实施流程部分将阐述执行ADAS试验所需的准备工作、数据采集与分析方法,以及结果评估与优化措施。
这一部分将帮助读者了解如何有效地进行ADAS试验,并提供参考指南。
最后,在结论与展望部分,将总结本文主要观点和发现结果,并对未来的ADAS 试验方法进行展望和建议。
1.3 目的本文的目的在于提供一个全面而清晰的概述,介绍主动安全ADAS试验方法。
通过阅读本文,读者将能够了解ADAS试验领域的基本知识、重要性及其常用的试验方法。
此外,本文还旨在帮助读者理解实施ADAS试验所需的流程,并提供进一步改进和优化ADAS系统性能的建议。
2. ADAS试验方法概述2.1 ADAS简介ADAS,即先进驾驶辅助系统(Advanced Driver Assistance Systems)是一种能够提供驾驶员辅助、提高驾驶安全性的技术。
ADAS测试方案

ADAS测试方案一方案概述随着5G通讯与互联网+的快速发展,智能汽车和ADAS辅助系统的研究与发展在世界范围内也如火如荼地进行。
风丘科技紧跟时代脚步,经多年积累沉淀,携手整车厂与高校共同研发,打造出了一套完整的且适用于国内ADAS测试的系统方案。
| ADAS测试面临的挑战:•信号种类多,数据量大。
ADAS测试需要大量的传感器,并且数据量大,而普通存储设备无法满足其存储要求。
•多种上位机无法实现同步采集与数据融合。
由于传感器安装位置不同导致对同一目标的检测数据存在偏差,并且不同的上位机软件难以实现同步,由此不仅数据的精确度受到了影响,而且实验的难度也增加了。
•大量数据存放及查找困难。
面对每天高达数T级的数据,需要将数据分类存放才能更便于查找和追溯。
二方案内容| 高性能数据记录仪:ETHOS•可搭载Windows/LINUX/ROS等众多操作系统,以实现多种使用场景。
•丰富的接口、扩展接口与协议支持,满足测试的各种传感器与数据接口需求。
•2个可移动存储驱动器插槽(至多2TB),满足大量数据记录需求。
•可搭载Inter/NVDIA等更新的高性能处理器与GPU,实现数据高速运算与处理。
| 汽车测试软件:Q-Vision•为汽车测试打造,支持ADAS测试/标定/诊断等多种用途。
•多种硬件支持,各种CAN、LIN硬件/激光雷达/摄像头/GPS等。
•多种视图形式与窗口,雷达点云图//雷达俯视图/地图轨迹/视频/CAN总线/y-t等。
•多种传感器同步采集与融合显示,可将不同传感器获取的同一目标在同一视图中进行信号融合。
•支持本地存储与数据同步回放,也可通过ASM ODS协议从服务器中获取实验数据。
•支持特定需求功能开发。
| 实验数据管理服务器:•企业级实验数据管理服务器,支持大量数据上传与下载。
•标签化数据处理,自动根据实验时间/车辆/场景等多种条件标签化数据,以便快速精确查找。
•支持数据本地上传与无线上传,支持数据调用与下载。
adas测试用例方法

adas测试用例方法ADAS(Advanced Driver Assistance Systems)是一种基于车载传感器和智能算法的先进驾驶辅助系统,旨在提高驾驶安全性和驾驶体验。
在ADAS的开发和测试过程中,测试用例方法是至关重要的一环,它能帮助工程师们有效地验证系统的功能和性能。
一、功能测试用例方法1. 辅助驾驶功能测试用例方法辅助驾驶是ADAS的核心功能之一,它包括自动巡航、自动泊车、车道保持等。
测试用例方法可以涵盖不同场景下的功能测试,比如高速公路上的自动巡航、城市道路上的自动泊车等。
通过模拟不同情况下的驾驶场景,测试用例能够验证系统是否能正确识别和响应各种情况。
2. 碰撞预警功能测试用例方法碰撞预警是ADAS中的重要功能之一,它能够通过传感器和智能算法实时监测车辆周围的情况,并在可能出现碰撞的情况下发出警告。
测试用例方法可以涵盖不同速度下的碰撞预警测试,包括前向碰撞、侧面碰撞、追尾碰撞等。
通过模拟不同速度和角度的碰撞情况,测试用例能够验证系统是否能准确地发出警告。
二、性能测试用例方法1. 传感器性能测试用例方法ADAS系统的核心组成部分是传感器,包括摄像头、雷达、激光雷达等。
测试用例方法可以涵盖传感器的性能测试,比如分辨率测试、距离测量测试、角度测量测试等。
通过测试用例,可以验证传感器的准确性和稳定性,确保系统能够准确地感知周围环境。
2. 算法性能测试用例方法ADAS系统的智能算法是实现其功能的关键,包括目标检测、车道识别、交通信号灯识别等。
测试用例方法可以涵盖算法的性能测试,比如目标检测的准确率测试、车道识别的稳定性测试等。
通过测试用例,可以验证算法的准确性和稳定性,确保系统能够正确地分析和判断周围环境。
三、稳定性测试用例方法1. 长时间连续工作测试用例方法ADAS系统需要长时间连续工作,以确保其在不同场景下的稳定性和可靠性。
测试用例方法可以涵盖长时间连续工作的测试,通过模拟ADAS系统在不同场景下的工作情况,验证系统是否能够持续稳定地工作。
车辆诊断-风丘科技
车辆诊断汽车工业的发展对世界经济起到巨大的推动作用,而如今汽车发展的一个方向就是电气化、智能化,越来越多功能强大、集成度高的ECU(电控单元)被开发出来,应用到车辆上。
与此同时,诊断也被越来越多的提及和应用在ECU中,一个显著的原因就是:诊断使得我们可以访问到ECU中的信息,即使他们已经被部署到了车辆上。
这就意味着在车辆测试、生成和售后阶段,诊断通常是访问ECU内部信息的唯一方法。
典型应用包括,故障存储操作,Flash 刷新,读取测量值等。
目前,国内的车辆诊断应用和国外相比还有很大的差距,北京风丘科技有限公司和德国Softing公司密切合作,大力推广基于ODX/OTX标准的车辆诊断方案,为ECU供应商和整车厂提供从最初的诊断数据库建立到售后工程诊断仪这一系列的完整的解决方案,致力于提高国内汽车使用的可靠性、经济性和安全性。
▶关于ODX∙ASAM MCD-2 D(market name:ODX) V2.2.0(2008)/ISO 22901-1∙全称:O pen D iagnostic data e X change∙挑战:在ODX标准之前,诊断和配置功能以及Flash数据描述都没有统一标准,大多是计算机不可读的数据格式(例如word、PDF)。
因此,相关的数据必然是手工输入到整个ECU生命周期的所有工具中,这样就导致了易出错,价格昂贵的问题并且阻碍了快速开发周期。
∙描述:ODX为应对这些挑战提供了一种基于XML的,计算机可读的数据格式来制定和交换ECU中诊断相关的数据。
整车、ECU和测试设备的厂商可以使用这种统一的,OEM独立的ODX格式来描述和交换ECU诊断数据。
∙优势:ODX允许不同车辆和ECU功能在表达形式上存在一些变型。
∙应用领域:ODX标准可以运用在车辆生命周期中车辆电控系统测试,配置和Flash 刷新的任何地方。
应用该标准的厂商们有效的减少了多种诊断工具的通信问题而且可以更好的支持多款车型。
adas测试流程用例
adas测试流程用例下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!ADAS 测试用例流程。
1. 测试准备。
熟悉 ADAS 系统功能和技术规格。
风丘EV能量流测试解决方案 提高电动汽车续航能力
关注电动汽车(EV)能效水平提高电动汽车续航能力引言:电动汽车(EV)近些年发展迅猛,已被汽车业内普遍认为是未来汽车发展的新方向,但现如今电动汽车仍然存在一些短板,导致其还无法替代传统燃油车。
对此,首先想到的肯定就是电动车的续航问题。
其实解决电动车续航问题主要需在两个方面进行改进:能量密度更高的电池和功耗更低(效率更高)的用电负载。
更高能量密度的电池研发与应用任重道远,因此当下对电动车整车和各系统的功耗和效率进行有效的测试与评估是提升电动汽车续航能力的主要途径。
由此,能量流测试的概念也就产生了。
一EV能量流路径分析能量流就是整车能量的传递路径以及在传递过程中的传递效率和能耗情况。
专业的能量流测试,有助于了解整车及各系统的能耗和能量转化效率,且可进行有针对性的改进、设计,以提高能效水平。
电动汽车(EV)在制动工况时存在特殊的能量回收机制,因此可将整车的主要能量流分为充电-行驶工况能量流和制动工况能量流。
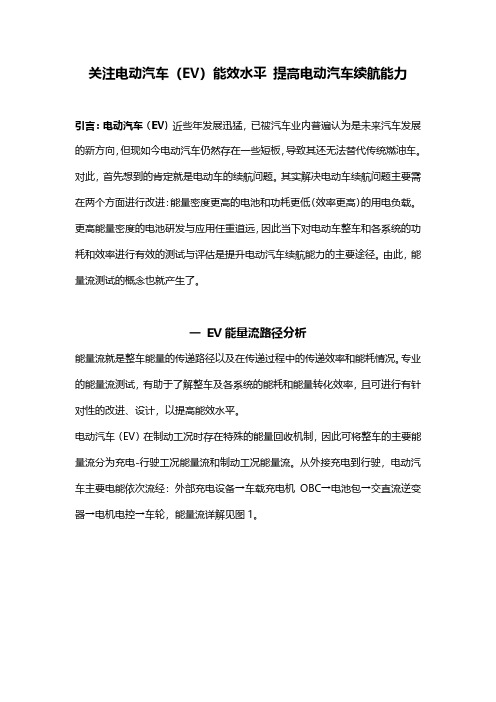
从外接充电到行驶,电动汽车主要电能依次流经:外部充电设备→车载充电机OBC→电池包→交直流逆变器→电机电控→车轮,能量流详解见图1。
(图1 充电-行驶过程中的能量流传递路径)如果在制动工况时能量回收,主要电能能量流则由车轮再回到电池包:车轮→电机电控→交直流逆变器→电池包,能量流详解见图2。
(图2 能量回收过程能量流传输路径)由上述内容可知,在每一处都会有能量的损失(大多以热能散发掉),且每个车型在同一处的能耗又是不一样的,由此整车的能效差异便产生了。
二解析BV能量流测试电动汽车(EV)从整车用电系统类别上看,主要分为高压系统和低压系统。
高压系统主要为:电驱动系统——驱动电机/电机控制器(MCU);供电系统——电池包/车载充电机(OBC);其他高压负载——空调(AC)/加热器(PTC)/高压配电盒(PDU)/DCDC等。
低压系统主要包括12V电源、风扇、水泵、BMS、仪表等。
(图3 EV整车电气结构)根据以上电动汽车整车电气结构的分析,可整理出能量流测试的主要测试需求,如图4。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAS驾驶辅助系统测试方案
随着ADAS驾驶辅助系统技术的快速发展以及在技术上的日臻成熟,ADAS在全球汽车市场近年来已开始快速普及和商业化,如何确保ADAS系统的可靠和安全已成为汽车领域的重要问题,因而ADAS驾驶辅助系统的测试也成为了各大整车厂及零部件厂商关注的热点。
ADAS的架构包括激光雷达、照相机、GPS等传感器、俯视的控制ECU以及传感器融合ECU。
ADAS驾驶辅助系统的作用就在于将雷达、摄像头等传感器的数据与汽车本身的动力学参数等数据进行融合及运算分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
对于ADAS驾驶辅助系统的测试而言,需要做的就是把这些数据记录下来,然后进行处理,进而纠正控制策略。
ADAS测试面临的挑战:
以Google智能汽车简图为例,它包含64束的激光雷达、车载雷达、2个照相机、2个红外照相机、GPS定位装置等传感器。
在进行ADAS驾驶辅助系统测试时,首先就需要将所有的这些数据记录下来,从而对测试带来了如下挑战:
1)融合各种传感器数据,如图像、雷达;
2)采集数据量大,高达4T/天。
风丘科技与众多整车厂及零部件客户做过计算,大致1天需要记录存储大约4T的数据,一般的设备很难记录下来,而且对数据存储的时间有很高的要求;
3)不同车辆上的数据采集同步。
在做一些测试的时候,如ACC跟车,需要在2台车上进行同步采集;
4)车辆状态采集。
如车辆的加减速度等;
5)高精度的GPS;
风丘科技的ADAS测试方案:
为了解决ADAS测试面临的以上问题,风丘科技携手德国IPETRONIK共同推出如下方案:
1、德国CAETEC品牌ARCOS记录仪:支持GPRS、以太网、USB等。
车上的摄像头可直接连
接ARCOS,从而采集数据。
2、对于激光雷达和毫米波雷达,可通过CAN协议采集数据。
3、高精度的GPS:对GPS进行标定,目前已达到2cm的精度。
4、传统的数据采集:M-sense、M-CNT模块以及传感器;也可以通过总线如CAN总线、LIN
总线等在车辆上进行数据采集。
所有的数据都可以存储在记录仪里面。
车间的同步采集:
采用2个IPEhubub(WIFI无线通信模块,支持每个模块2个CAN通道);通过WIFI可将它们桥接在一起,可同时对2台车上的设备进行融合。
同理,也可以在每台车上增加数采设备,或者在CAN网络上采集数据。
最后将所有的数据统一存储。
对于ADAS测试ARCOS所做的改进:
ARCOS 1.5 装备DriveBay 用于ADAS应用
1)通过RAID操作实现大容量数据存储
2)安全地存储大容量数据(支持所有常用数据格式,
如BLF, AVI, WAV, MDF4.0, MDF4.1, ASC, ATFX, PCAP 等)
3)热插拔‒ 在工作期间更换硬盘
4)数据传输速率高达12GB/minute。