基于Prescan的智能驾驶辅助系统在环研究
基于Prescan进行CIDAS场景建设

10.16638/ki.1671-7988.2021.06.017基于Prescan进行CIDAS场景建设姜家如1,刘君程2,宋绍文1,罗传东1,王涛1,李石1(1.安徽江淮汽车集团股份有限公司技术中心,安徽合肥230601;2.安徽江淮汽车集团股份有限公司海外汽车研究所,安徽合肥230601)摘要:文章主要采用Prescan软件对中国交通事故深入研究(CIDAS)场景进行模拟,建立虚拟仿真模型。
其中CIDAS场景数据主要通过公安部道路交通安全研究中心制定中国车辆安全管理政策的相关数据和汽车安全标准、C-NCAP管理规则的制修订的微观事故数据样本。
然后通过Prescan软件,复现现场,并且结合MATLAB编制的控制策略完成事故发生过程。
关键词:自动泊车;场景;雷达传感器;控制策略;仿真分析中图分类号:TP391.9 文献标识码:B 文章编号:1671-7988(2021)06-58-02CIDAS Scene Construction Based on PrescanJiang Jiaru1, Liu Juncheng2, Song Shaowen1, Luo Chuandong1, Wang Tao1, Li Shi1( 1.Technology Center of Anhui Jianghuai Automobile Group Crop., Ltd., Anhui Hefei 230601;2.Anhui Jianghuai Automobile Group Crop., Ltd. International Company, Anhui Hefei 230601 )Abstract:This article mainly uses Prescan software to simulate the China In-depth Study of Traffic Accidents (CIDAS) scenario and establish a virtual simulation model. Among them, the CIDAS scene data is mainly based on the data related to the development of China's vehicle safety management policies by the Road Traffic Safety Research Center of the Ministry of Public Security, and the micro accident data samples of the formulation and revision of automobile safety standards and C-NCAP management rules. Then use Prescan software to reproduce the scene, and complete the accident process in combination with the control strategy compiled by MATLAB.Keywords: Automatic Parking; Scene; Radar Sensor; Control Strategy; Simulation AnalysisCLC NO.: TP391.9 Document Code: B Article ID: 1671-7988(2021)06-58-02引言自2017年以来,市场上具有智能驾驶功能的车辆如雨后春笋,不仅是合资车,自主车型的智能驾驶功能也逐渐全面[1]。
基于PreScan的AEB算法开发与仿真验证

基于PreScan的AEB算法开发与仿真验证如果碰撞迫在眉睫,而司机没有采取任何行动(或行动不够快),自动紧急制动(AEB)系统就会自动开始制动。
AEB能够检测到潜在的碰撞,并激活制动系统,使车辆减速,目的是避免碰撞,或至少减轻其影响。
根据博世德国研究的数据,有了自动紧急制动系统,多达72%的追尾碰撞造成的人身伤害可以得到避免,在30Km/h以下的所有追尾碰撞中可以防止多达2/3 的人身伤害和财产损失。
主动安全技术可以完全防止事故的发生,或至少积极帮助司机减少紧急情况的影响。
主动系统让司机在危险情况下有更多的控制权。
为此,各种安全系统不断监测车辆的性能和周围环境。
如果自动紧急制动系统检测到与前车或静止车辆的距离在30公里/小时(18英里/小时)以上时变得非常短,它将为潜在的紧急制动系统做准备。
如果驾驶员没有对危险情况作出反应,系统会通过声音和/或视觉信号向驾驶员发出警告,然后是一个短暂但明显的刹车,一般称为点杀。
然后,系统启动部分制动,以降低车速,给司机提供宝贵的反应时间。
一旦司机踩下制动踏板,系统就会提供制动支持。
为了做到这一点,系统不断计算避免碰撞所需的车辆减速程度。
如果系统检测到司机未能施加足够的刹车力,它就会将刹车压力增加到所需的水平,这样司机就能在碰撞发生前尝试将车辆停住。
如果司机未能对眼前的碰撞风险作出反应,而自动紧急制动系统确定追尾碰撞是不可避免的,它可以自动启动全面制动。
因此,当碰撞发生时,车辆的行驶速度大大降低,减少了两车乘客的碰撞严重性。
随着智能驾驶技术的发展,道路车辆正因此而变得越来越"聪明"和安全。
使用传感器使汽车能够在危险发生之前看到危险,从而预测要采取什么行动。
但是,传感器应该观察什么,有哪些相关的交通场景可以开发和测试验证你的系统?如何将观察结果转化为车辆的反应,意外中断的影响是什么,甚至更具有挑战性的是,你如何确保来自不同传感器的信息以这样一种方式结合起来,使车辆以一种稳定的方式做出适当的反应?为了帮助回答这些问题,我们可以使用Prescan:一个可以搭建智能驾驶系统开发和验证评估环境的仿真软件,在这个环境中,智能汽车可以实际看到它们正在行驶的周围环境,并能随后做出反应。
基于机器学习的智能行车辅助系统研究

基于机器学习的智能行车辅助系统研究近年来,随着智能化、自动化、信息化等新科技的不断发展,人们生活方式、交通出行等方面也发生了翻天覆地的变化。
在众多新技术领域中,汽车驾驶技术的智能化也引起了广泛的关注。
基于机器学习的智能行车辅助系统是其中一项有着广泛前景的技术,本文将对该技术进行细致研究并探讨其在未来的应用前景。
一、基于机器学习的智能行车辅助系统的研究概述基于机器学习的智能行车辅助系统主要包括车辆感知模块、驾驶状况识别模块、情境分析与预测模块以及驾驶决策模块等,其中车辆感知模块主要用于实时感知车辆周围的道路环境、交通状况等。
驾驶状况识别模块用于通过各种传感器获取驾驶员的行为特征,分析驾驶员的驾驶行为状态,如疲劳程度等。
情境分析与预测模块主要用于对车辆周围环境进行深度学习,分析当前行车情境下的交通状况以及路况等。
驾驶决策模块则是基于以上几个模块的数据,进行较为复杂的计算分析,并给出行车建议,指导驾驶员进行更加安全、自动化的行车。
不同于传统的车辆辅助技术,基于机器学习的智能行车辅助系统采用人工智能技术,通过大量的数据采集、处理、分析和训练学习,从而达到更高级别的智能化。
二、机器学习的基本概念机器学习是一种能够让计算机通过经验自动更新的技术。
它的核心思想是通过数据的归纳整理和推理,不断地提高机器的性能和效率。
目前机器学习主要分为三大类,监督学习、无监督学习和强化学习。
1、监督学习:是指给机器一个标签的数据集,让机器在学习样本后能够自己进行分类、检测操作,从而学会从输入中产生正确的输出。
这种学习技术在智能行车辅助系统中有着广泛应用。
2、无监督学习:是指机器在学习过程中没有给出标签的数据集,机器根据输入数据的数据模式来学习,从而输出结果。
3、强化学习:是指以试错为学习方法,机器在不断地选择和执行动作时,得到积极的回报时增加相应的权重和概率。
三、基于机器学习的智能行车辅助系统的应用前景虽然基于机器学习的智能行车辅助系统目前还存在一些潜在问题,但是其应用前景还是不可限量的。
自动驾驶汽车硬件在环仿真实验平台研发

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and Management第38卷第2期2021年2月Vol.38 No.2 Feb. 2021DOI: 10.16791/j.c n k i.s j g.2021.02.027自动驾驶汽车硬件在环仿真实验平台研发雍加望K2,冯能莲3,陈宁1(1.北京工业大学北京市交通工程重点实验室,北京100124;2.清华大学汽车安全与节能国家重点实验室,北京100084; 3.北京工业大学环境与生命学部,北京100124)摘要:自动驾驶汽车作为重点竞争领域将是今后一个时期内国内外汽车工业发展的主流趋势。
为使学生更全面地理解并掌握自动驾驶汽车关键技术,研发了自动驾驶汽车硬件在环仿真实验平台(A V H1L)。
A V H I L硬件层面集成了实车制动系统、转向系统、传感器系统以及网络通信系统,可提供完整的整车硬件在环实验环境;A V H IL 软件层面以M A T L A B/S im u lin k为核心构建快速控制原型算法,基于P r e S c a n软件提供虚拟现实界面和环境感知类传感器模块,利用C a r S i m软件实时运行整车动力学模型。
A V H I L为自动驾驶上层控制算法与底层执行机构的开发与测试、高级驾驶辅助系统开发与测试、驾驶员行为特性研究等提供了实时高效的仿真平台,为本科生教学与研究生实践奠定了实验基础。
关键词:自动驾驶;硬件在环;仿真;实验平台中图分类号:U467.3文献标识码:A文章编号:1002-4956(2021)02-0127-05Development of hardware-in-the-loop simulation experimentalplatform for automatic driving vehicleY O N G J ia w a n g1,2,F E N G N e n g lia n3,C H E N N in g1(1. B e ijin g K e y L a b o ra to ry o f T ra ffic E n g in e e rin g, B e ijin g U n iv e rsity o f T ech n o lo g y, B e ijin g100124, C h in a;2. S tate K e y L a b o ra to ry o f A u to m o tiv e S a fe ty a n d E n erg y, T sin g h u a U n iv e rsity, B e ijin g100084, C h in a;3. F a c u lty o f E n v iro n m e n t a n d L ife, B e ijin g U n iv e rsity o f T e c h n o lo g y, B e ijin g100124, C h in a)Abstract: A s a k e y c o m p e titio n a r e a, th e a u to m a tic d r iv in g v e h ic le w ill b e c o m e th e m a in tr e n d o f th e d e v e lo p m e n t o f a u to m o b ile in d u s tr y a t h o m e a n d a b r o a d in th e n e x t p e r io d. In o r d e r to e n a b le s tu d e n ts to u n d e r s ta n d a n d m a s te r th e k e y t e c h n o lo g ie s o f a u to p ilo t, a h a r d w a r e-in-th e-lo o p s im u la tio n e x p e r im e n ta l p la tf o r m(A V H IL) is d e v e lo p e d. T h e h a r d w a r e le v e l o f A V H IL in te g r a te s th e r e a l v e h ic le b r a k in g s y s te m, s te e r in g s y s te m, s e n s o r s y s te m a n d n e tw o r k c o m m u n ic a tio n s y s te m, w h ic h c a n p r o v id e a c o m p le te v e h ic le h a r d w a r e-in-th e-lo o p e x p e r im e n ta l e n v ir o n m e n t. A t th e A V H IL s o f tw a r e le v e l, th e r a p id c o n tr o l p r o to ty p e a lg o r ith m is c o n s tr u c te d w ith M A T L A B/ S im u lin k a s th e c o r e. T h e v ir tu a l r e a lity in te r fa c e a n d e n v ir o n m e n t s e n s in g s e n s o r m o d u le a r e p r o v id e d b a s e d o n P re S c a n s o f tw a r e, a n d th e v e h ic le d y n a m ic m o d e l is ru n in r e a l tim e b y C a r S im s o f tw a r e. A V H IL p r o v id e s a r e a l-tim e a n d e f f ic ie n t s im u la tio n p la tf o rm fo r th e d e v e lo p m e n t a n d te s t o f th e u p p e r c o n tr o l a lg o r ith m a n d th e u n d e r ly in g a c tu a to r, d e v e lo p m e n t a n d te s t o f a d v a n c e d d r iv in g a s s is ta n c e s y s te m a n d r e s e a r c h o f d r iv e r b e h a v io r c h a r a c te r is tic s, w h ic h la y s a n e x p e r im e n ta l fo u n d a tio n f o r u n d e r g r a d u a te t e a c h in g a n d g r a d u a te p r a c tic e.Key words: a u to m a tic d r iv in g; h a r d w a r e-in-th e-lo o p; s im u la tio n; e x p e r im e n ta l p la tf o r m世界汽车工业发展围绕着“安全、舒适、节能收稿日期:2020-05-15基金项目:北京工业大学交通工程科研基地开放探索项目(2019BJUT- JTJDS012);汽车安全与节能国家重点实验室开放基金课题(K F2010);北京工业大学教育教学研究项目(ER2011-A03 )作者简介:雍加望(1988—),男,安徽巢湖,博士,讲师,主要从 事自动驾驶汽车、汽车动力学与稳定性控制方面的研究。
基于PRESCAN的汽车自动驾驶仿真

基于PRESCAN的汽车自动驾驶仿真贺勇;王春香;董永坤【期刊名称】《电脑知识与技术》【年(卷),期】2012(000)033【摘要】The automatic driving technologies are now getting more and more attention.Simulation in advance can provide ref⁃erence for selecting sensors and designing control algorithm. The software PRESCAN can accomplish the simulation of auto⁃matic driving process. After the process of building virtual traffic scene and adding sensors and control algorithm, the vehicle can drive automatically. The stability of the driving process is analysed.% 汽车自动驾驶技术受到越来越多的关注,在智能车技术研究中,预先的软件仿真能够为传感器选用和控制算法设计提供参照.PRESCAN软件能够完成汽车自动驾驶过程仿真,选取典型路段建立虚拟交通场景,添加传感器和控制模块,成功实现了简单的自动驾驶,并分析了汽车在理想情况下自动驾驶的稳定性.【总页数】3页(P8047-8049)【作者】贺勇;王春香;董永坤【作者单位】上海交通大学,上海 200240;上海交通大学,上海 200240;上海交通大学,上海 200240【正文语种】中文【中图分类】TP18【相关文献】1.基于仿真平台的自动驾驶汽车转向控制方法优化研究 [J], 王一霖;万华森;曾鹏2.基于仿真平台的自动驾驶汽车转向控制方法优化研究 [J], 王一霖[1];万华森[1];曾鹏[1]3.基于CA模型下自动驾驶汽车对交通堵塞影响的仿真模拟 [J], 潘昊;章子皓;虞千迪4.基于CA模型下自动驾驶汽车对交通堵塞影响的仿真模拟 [J], 潘昊;章子皓;虞千迪5.安森美半导体携手NVIDIA开展基于云的自动驾驶汽车仿真 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
PreScan在先进驾驶辅助系统评价中的应用
PreScan在先进驾驶辅助系统评价中的应用
刘颖;朱西产;李佳琦
【期刊名称】《佳木斯大学学报(自然科学版)》
【年(卷),期】2013(031)005
【摘要】提出了使用PreScan模拟真实驾驶环境复现危险工况,获得驾驶数据并评价先进驾驶辅助系统(ADAS,Advanced Driver Assistance System)的一种研究方法.虚拟驾驶环境中的驾驶员车辆使用外接方向盘和踏板输入;其它危险车辆的行驶状况都与驾驶员车辆的运动情况相关联.同时,在PreScan生成的Simulink模型中编辑危险车辆的控制,人机界面和数据输出等模块.最后,通过分析主观问卷和输出的驾驶数据评价驾驶员对ADAS的接受度及其有效性.
【总页数】4页(P696-699)
【作者】刘颖;朱西产;李佳琦
【作者单位】同济大学,上海201804;同济大学,上海201804;同济大学,上海201804
【正文语种】中文
【中图分类】U270.1+4
【相关文献】
1.金刚石压齿锯片在先进陶瓷加工中的应用评价 [J], 张峰;沈剑云;郭桦;徐西鹏
2.先进驾驶辅助系统人机交互界面评价方法研究 [J], 李霖;贺锦鹏;刘卫国;朱西产;孙东
3.机器视觉在汽车驾驶辅助系统中的应用 [J], 张琳琳;郑碧琪
4.混合评价核数据库系统HENDL3.0研发及其在先进核能系统设计中应用 [J], 吴宜灿;王芳;胡丽琴;何桃;FDS团队;邹俊;郝丽娟;王明煌;杨琪;宋婧;汪进;尚雷明;龙鹏程
5.先进路面设备在公路工程质量检测及路况评价中的应用 [J], 汪涛;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PreScan的智能网联测试环境搭建与仿真

基于PreScan的智能网联测试环境搭建与仿真
崔振;赵一凡;孟祥虎
【期刊名称】《物联网技术》
【年(卷),期】2023(13)1
【摘要】为加速智能网联产品的开发与迭代速度,降低开发成本,基于公司内部的智能网联测试园区环境,用PreScan建立了同样比例的虚拟测试场景,根据测试园区的实际经纬度坐标对所搭建的虚拟测试场景进行设置,实现虚拟与现实的统一。
基于所建立的虚拟仿真场景,实现了车辆自动驾驶循迹控制、自动紧急制动仿真,验证了所建立的虚拟仿真测试环境。
【总页数】3页(P71-72)
【作者】崔振;赵一凡;孟祥虎
【作者单位】徐州徐工汽车制造有限公司
【正文语种】中文
【中图分类】TP273;U463.6
【相关文献】
1.基于FlightGear的近地警告系统飞行仿真测试环境搭建
2.产业计量云、全国智能网联汽车专用计量测试技术委员会及国家智能网联汽车产业计量测试联盟上线成立
3.智能网联汽车车载智能计算平台仿真测试评价
4.智能网联汽车公开道路网联测试环境搭建研究
5.仿真测试在智能网联汽车准入测试的政策应用与技术基础分析
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Prescan和Trucksim模型在环测试研究

Trucksim 的模型在环仿真测试方法的
汽 频率一致。 车
图 6 Trucksim 与 Prescan 联仿设置图 便捷有效。
》
ORNL 展示双向无线充电技术
图 2 Prescan GUI 设置界面 3.2.2 Trucksim 端
① 设置车辆参数; ② 设置 IO 接口; ③ 设置仿真频率。
A. 释 放 轮 胎 转 动 效 果(Wheel
能 刹 停 避 免 追 尾, 并 且 简 化 版 AEB
displacement),B. 加 入 坐 标 和 单 位
《 转换模块;
算法能通过 CCRs 法规工况要求,同
重
时 也 证 明 了 本 文 所 述 基 于 Prescan 和
型
⑤设置仿真频率保证两软件仿真
快捷,可实现简单场景的快速搭建。 重
Trucksim 采用参数化建模,上手快、
型 汽
操 作 简 便。Prescan 和 Trucksim 都 运 车
测试里程和测试周期长、场景复杂且危
PreScan 是 原 Tass 公 司 开 发 的 以 行 于 Windows 系 统, 对 Simulink 环 》
通过将 Simulink 控制算法和动力学软 的仿真软件,可以仿真车辆对驾驶员、 作,以避免或减轻碰撞造成的伤害。根
件中的整车模型、交通场景软件中的道 路面及空气动力学输入的响应,用于分 据 ENCAP 法规,AEB 的标准追尾工
析车辆的动力性、经济性、操纵稳定性、 况有三种,分别是 CCRs(前车静止)、
③连接传感器及 IO 接口,开环调
AEB 算法,被控对象是整车模型,将
①在“Set path”界面加入“solver”; 试;
Prescan自动驾驶仿真技术及应用

Prescan自动驾驶仿真技术及应用通过使用领先的基于物理学的仿真平台来证明自动驾驶系统的安全性和可靠性,该平台可对自动驾驶车辆功能进行强大的系统测试。
Simcenter允许工程师通过遵循系统化的方法来测试、开发和优化自动驾驶系统。
这将提高整个系统工程的效率,从早期的算法研究和原型开发,直到最后阶段的验证、系统认证和自动驾驶车辆的认证。
PreScan包括各种ADAS和AV功能和认证测试的即用场景库,结合一套广泛的传感器模型,可以快速评估完整的自动驾驶系统及组成的每个部分。
它是一个开放的环境,遵循所有主要的行业标准,并允许与第三方工具和企业内部流程进行整合。
工程师可以轻松地进行自动驾驶研究,以确定车辆的最佳传感器配置,开发强大的驾驶辅助及自动驾驶系统,评估感知、融合、规划和控制算法的性能,并为做自动车辆系统的验证和认证做准备。
充分利用一套符合主要行业标准的测试方案。
可用的兼容测试及其相应的规范是:自适应巡航控制(ACC)的ISO测试协议、自主紧急制动系统(AEBS)的欧洲NCAP性能测试、AEBS的ADAC性能测试、车道偏离预警(LDW)的ISO测试协议、车道偏离预警(LDW)的NHTSA测试协议、交通标志识别(TSR)的欧洲NCAP性能测试、变道辅助系统(LCAS)的ISO测试协议和LCAS的eValue测试协议。
支持基于云端布置大规模仿真。
要为自动汽车功能的运行做好准备,仅仅驾驶数百万英里的高速公路是不够的。
相反,行业需要有能力对自动驾驶算法进行压力测试,不仅是在正常情况下,尤其是在边缘情况下。
这就是集群仿真发挥作用的地方。
PreScan中的集群功能允许工程师测试数百万种场景,同时改变车辆参数、天气、传感器参数等仿真参数。
通过硬件在环测试,将驾驶员直接置于测试环境中来设计人机界面(HMI)系统和子系统,更有效地验证和确认物理ECU硬件组件。
PreScan可以利用特殊的投影盒将生成的图像投射到物理相机中,或者注入物理传感器处理流水线中,让工程师可以测试ECU或其他被评估设备的不同层次。
PreScan在先进驾驶辅助系统评价中的应用
发生 的危险 , 以引起注 意和提 高安 全性 的主动 安全 技术 ¨ . A D A S评价 方 法 主 要 有 以下 几 种 : 第一 , 在试 验场进 行道 路 测 试 , 通 过 在试 验 场 中复 现 危 险 工
整个试 验空 间 以黑色幕 布与外 界隔 离 , 提供相 对封 闭 的模 拟驾驶 环境 . 试验 设备 主体是合 金搭建
的框 架 , 为其 它设 备 提 供 安装 固定 的 位置 . 驾驶 员 座椅 安装在 轨道 上 , 能 够 前后 移 动 , 以适应 不 同身 材 的测试 者. 由于 P r e S c a n简单 动力 学 车辆模 型 的
安装 了两个 摄像 头 , 一 个 安装 在 框 架后 侧 , 录 制整
个测试 过程 ; 另一 个 安 装 在框 架 前 面 , 录制 驾驶 员 行为 . 通过 放 在框 架后 上方 的投影 仪在设备 前方 的 白色 墙壁 上投 影 出 P r e S c a n中编辑 的测试 场景 , 模 拟驾驶 员视 野. 根据 A D A S的人机 交互 界面 ( H MI , H u ma n Ma c h i n e I n t e r f a c e ) 显 示方 式的不 同, 可能会
境噪 音 , 并播 放 A D A S的提 示声 音. 为 了保 存 测试 过程 的影像 资料 和录 制驾驶 员 的驾驶行 为 , 系统 中
况, 测量车辆的运动参数, 得到 A D A S 相关数据 ; 第
二, 实车 道路测试 , 在若 干 车辆上 安装测 量装 置 , 进 行大量 自然驾驶 后 , 统计 得 到 AD A S避免 事故发 生
Vo l _ 31 No . 5
基于PRESCAN的汽车自动驾驶仿真

基于PRESCAN的汽车自动驾驶仿真作者:贺勇王春香董永坤来源:《电脑知识与技术》2012年第33期摘要:汽车自动驾驶技术受到越来越多的关注,在智能车技术研究中,预先的软件仿真能够为传感器选用和控制算法设计提供参照。
PRESCAN软件能够完成汽车自动驾驶过程仿真,选取典型路段建立虚拟交通场景,添加传感器和控制模块,成功实现了简单的自动驾驶,并分析了汽车在理想情况下自动驾驶的稳定性。
关键词:PRESCAN;自动驾驶;仿真中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2012)33-8047-03自动驾驶汽车,又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。
汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图对前方的道路进行导航。
目前,自动驾驶汽车技术日趋完善,由谷歌研发的自动驾驶汽车已经能够进行远距离自驾,但国内研究中部分技术的可靠性和稳定性等方面尚需提高。
从典型交通场景出发,该文通过采用PreScan软件进行虚拟交通场景设计与仿真,验证自动驾驶技术的可行性和可靠性。
1PRESCAN软件简介PreScan是一个用于先进驾驶辅助系统和主动安全系统开发验证的仿真工具,系统采用传感器监测车辆的周围环境并使用获得的信息采取行动,这类行动可以是警告司机回避潜在的危险,也可以使通过自动刹车或自动转向主动回避危险。
PreScan可用于高级驾驶辅助系统上的传感器包括雷达、激光、摄像头、GPS等。
运用软件仿真有四个步骤:搭建场景、添加传感器、添加控制系统、运行仿真。
2PRESCAN场景建模选取几种典型的交通场景,包括环岛,十字路口等搭建虚拟场景。
PreScan软件是一个进行场景建模和仿真的汽车应用软件,在PRESCAN中除了搭建车道外还可以添加树木、房屋等元素,用来更好模拟现实环境。
3传感器选择汽车自动驾驶的前提是周围交通环境信息的实时获取,一般使用的传感器包括全景摄像头,激光雷达以及GPS定位等,PreScan软件中提供的各种传感器与现实传感器的功能一致,仅在检测效果上更加精确,GPS可以完全精确定位,摄像头可以无死区监测,雷达传感器不存在虚检测等。
基于Prescan的智能汽车车道偏离预警系统研究

基于Prescan的智能汽车车道偏离预警系统研究作者:张云龙刘全周唐风敏宋洁来源:《时代汽车》2019年第17期摘要:本论文主要介绍了车道偏离预警系统的定义和功能,并介绍了车道偏离预警系统进行报警的区域;然后运用Prescan软件搭建车道偏离预警场景,并与Simulink进行联合仿真,验证车道偏离预警算法,该算法满足报警需求。
最后,论文对车道偏离预警系统地研究进行了总结。
关键词:Prescan;车道偏离;预警系统1 引言近年来,随着汽车保有量的持续增长,道路交通压力亦变大,因此,如何保证汽车行车安全就显得尤为重要。
车道偏离预警系统(lane departure warning system ,LDWS)的研究與应用为保证驾驶员和行人安全带来了福音,当车辆无意识偏离车道时,该系统能够及时提醒人类驾驶员的注意,在一定程度上减少或避免了交通事故的发生。
2 车道偏离预警系统概述车道偏离预警系统(LDWS)是基于视频系统的驾驶员辅助功能,在车辆无意识偏离车道时来提醒驾驶员。
无意识的车道偏离包含两部分:已经发生的车道偏离和即将发生的车道偏离。
车道偏离预警系统的开发应用,大大减少了侧向碰撞以及其它相关事故的发生。
在车道边线可见的情况下,车道偏离预警系统(LDWS)使用摄像头对车道边线进行检测,并测量自身车辆与车道两侧边缘线的相对距离与方位。
当摄像头检测到自车与车道线距离接近或已偏离行驶车道时,该系统就会发出报警。
在整车系统中,报警系统可通过视觉、声音或触觉形式体现。
LDWS对不同类型(实线、虚线和点状线)和颜色(白色、黄色、橙色和蓝色)的道路标记线均有效,且LDWS对没有车道标记线的路沿也有效。
3 车道线的识别与报警智能汽车车道偏离预警系统的关键性能包括两部分:车道线识别性能和车道偏离报警性能。
车道线识别性能根据控制器输出的视频信号和车道线信息进行评估;车道偏离预警需要综合考虑车辆的速度、状态以及车辆相对车道线的位置进行评估。
基于人工智能的智能驾驶辅助系统研究

基于人工智能的智能驾驶辅助系统研究随着人类进步和科技飞速发展,人工智能应用已经成为了当今社会的一个重要领域。
在交通领域,智能驾驶辅助系统是人工智能应用的重要领域之一。
这种技术可增强驾驶员对车辆环境的认知和管控,提高驾驶的安全性和舒适性。
目前,全球各大汽车厂商都积极研发和推广智能驾驶辅助系统,并广泛应用于高端车型中,在智能普及的接下来,智能驾驶将能够逐渐普及到所有汽车。
这种技术是实现自动驾驶的关键因素之一,也是实现交通安全性的基础。
基于人工智能的智能驾驶辅助系统需要结合大量的先进技术。
无人驾驶技术是智能驾驶的核心技术之一,因为只有当汽车的控制是自主的,才可以实现完全的自动驾驶。
为了实现自主控制,驾驶员可以使用传感器系统、卫星导航系统和通信系统等设备来将信息反馈给汽车。
在无人驾驶技术之外,深度学习也是智能驾驶的重要技术之一。
深度学习是一种人工智能技术,可以通过判断原始数据中的面部表情、语言、图像、声音等特征来自主理解和判断不同的情况。
在智能驾驶领域,深度学习应用于视觉感知和自主导航,这些技术是实现车辆的自主运行和行驶的充分认知的关键。
基于人工智能的智能驾驶辅助系统需要具备高度的实时处理能力,因为这种技术必须能够即时反馈驾驶员,使他们可以在发生意外事件之前及时发现和应对。
同时,这种技术需要满足不同路况的需求,不同的环境对智能驾驶系统的影响也是因地制宜的。
为了满足这些要求,人工智能技术研究者正在积极探究新的算法和技术,包括深度学习神经网络、多传感器信息融合、精准定位和导航以及自主决策和规划等,以应对智能驾驶的不断发展和提高。
在智能驾驶技术的发展进程中,人工智能将发挥越来越重要的作用。
这种技术将会使驾驶变得更加安全和舒适。
与此同时,也需要进一步加强人工智能的研究和应用,提高智能驾驶技术的精度和可靠性,更好地服务人类生活和发展。
基于人工智能的智能汽车驾驶辅助系统研究

基于人工智能的智能汽车驾驶辅助系统研究智能汽车驾驶辅助系统的研究与发展随着科技的不断进步,人工智能(Artificial Intelligence,AI)在汽车产业中的应用也变得越来越普遍,尤其是智能汽车驾驶辅助系统。
这一系统以人工智能为核心,通过传感器、摄像头、雷达和计算机等技术,提供各种实时信息和驾驶辅助功能,以提高驾驶安全性、降低事故风险、提升驾驶者体验。
一、人工智能技术在智能驾驶辅助系统中的应用1. 感知与感应技术:智能驾驶辅助系统通过传感器、摄像头、雷达等设备对周围环境实时感知,能够准确识别道路、行人、交通标志等要素,并对其进行识别、跟踪和监控。
通过AI算法的分析和处理,系统能够提供关键信息,如车道偏离预警、盲区监测和交通信号识别,以帮助驾驶者做出更加明智的决策。
2. 自动驾驶功能:基于人工智能的智能汽车驾驶辅助系统还包括自动驾驶功能。
通过激光雷达、摄像头和其他传感器的数据,系统可以进行环境感知和路径规划,实现自动驾驶。
该技术在高速公路、无人驾驶出租车和特定路段的自动驾驶等领域已经有了较广泛的应用。
3. 语音与人机交互:AI技术的另一个关键应用是语音识别和人机交互。
驾驶者可以通过语音命令与智能汽车驾驶辅助系统进行沟通,如导航、调整温度和播放音乐等。
这种便捷的交互方式可以大大减少驾驶者注意力分散,提高驾驶安全性。
二、智能汽车驾驶辅助系统的优势与挑战1. 驾驶安全性的提升:智能汽车驾驶辅助系统能够帮助驾驶者发现并纠正潜在的驾驶错误,比如车道偏离、盲区等。
它还可以主动预测交通状况和可能的危险,及时发出警告,提醒驾驶员遵循交通规则。
这些功能有助于预防交通事故的发生,提高驾驶的安全性。
2. 降低驾驶疲劳度:驾驶长时间会使驾驶者疲劳,从而影响驾驶的安全性。
智能汽车驾驶辅助系统可以帮助驾驶者更好地应对疲劳。
例如,系统可以通过摄像头和传感器监测驾驶者的疲劳程度,提醒他们休息。
此外,自动驾驶功能也可以在疲劳驾驶时代替驾驶者,确保安全行驶。
基于PreScan的BSD测试场景构建与研究
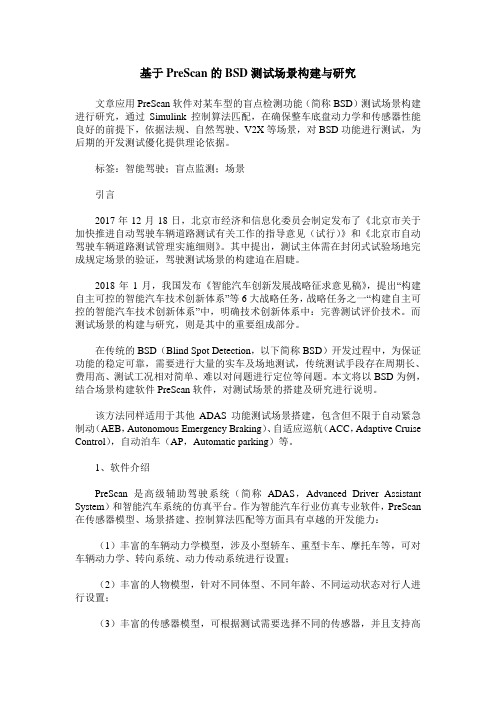
基于PreScan的BSD测试场景构建与研究文章应用PreScan软件对某车型的盲点检测功能(简称BSD)测试场景构建进行研究,通过Simulink控制算法匹配,在确保整车底盘动力学和传感器性能良好的前提下,依据法规、自然驾驶、V2X等场景,对BSD功能进行测试,为后期的开发测试優化提供理论依据。
标签:智能驾驶;盲点监测;场景引言2017年12月18日,北京市经济和信息化委员会制定发布了《北京市关于加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》和《北京市自动驾驶车辆道路测试管理实施细则》。
其中提出,测试主体需在封闭式试验场地完成规定场景的验证,驾驶测试场景的构建迫在眉睫。
2018年1月,我国发布《智能汽车创新发展战略征求意见稿》,提出“构建自主可控的智能汽车技术创新体系”等6大战略任务,战略任务之一“构建自主可控的智能汽车技术创新体系”中,明确技术创新体系中:完善测试评价技术。
而测试场景的构建与研究,则是其中的重要组成部分。
在传统的BSD(Blind Spot Detection,以下简称BSD)开发过程中,为保证功能的稳定可靠,需要进行大量的实车及场地测试,传统测试手段存在周期长、费用高、测试工况相对简单、难以对问题进行定位等问题。
本文将以BSD为例,结合场景构建软件PreScan软件,对测试场景的搭建及研究进行说明。
该方法同样适用于其他ADAS功能测试场景搭建,包含但不限于自动紧急制动(AEB,Autonomous Emergency Braking)、自适应巡航(ACC,Adaptive Cruise Control),自动泊车(AP,Automatic parking)等。
1、软件介绍PreScan是高级辅助驾驶系统(简称ADAS,Advanced Driver Assistant System)和智能汽车系统的仿真平台。
作为智能汽车行业仿真专业软件,PreScan 在传感器模型、场景搭建、控制算法匹配等方面具有卓越的开发能力:(1)丰富的车辆动力学模型,涉及小型轿车、重型卡车、摩托车等,可对车辆动力学、转向系统、动力传动系统进行设置;(2)丰富的人物模型,针对不同体型、不同年龄、不同运动状态对行人进行设置;(3)丰富的传感器模型,可根据测试需要选择不同的传感器,并且支持高级自定义,更接近真实的传感器工作原理;(4)能够与MATLAB/Simulink、CarSim等软件进行联合仿真。
智能驾驶辅助系统研究与实现

智能驾驶辅助系统研究与实现随着科技飞速发展,人们的出行方式也在发生着巨大的改变。
智能驾驶辅助系统作为汽车行业的一项重要技术,正在不断地得到改进和完善。
本文将介绍智能驾驶辅助系统的研究与实现,着重探讨其技术原理、市场前景以及未来展望。
一、技术原理智能驾驶辅助系统是一种基于传感器、通信、控制等高科技手段的交通安全系统,能够提供对驾驶员的实时监测和数据分析,从而实现车辆自主行驶和驾驶员的辅助。
该系统主要由车载计算机、雷达、激光雷达、相机、控制单元等几个主要部分构成。
其中车载计算机是整个系统的“大脑”,用来处理传感器采集的各种数据,同时为汽车提供更高的自主性和智能化水平。
雷达用于对车辆周边环境进行远距离探测,能够发现在车辆视线之外的移动物体,并向车载计算机发送报警信息。
激光雷达在短距离内提供高精度的三维地图,能够更准确地检测障碍物和车道线。
相机则用于采集图像和视频,分析驾驶员的面部表情及眼神行为,并向车载计算机发送警告信息。
控制单元是系统中的“执行者”,根据车载计算机的指令控制车辆的方向、速度、加速和刹车等动作。
二、市场前景随着一系列智能驾驶技术的不断涌现,行业内的竞争也越来越激烈。
据市场调查机构显示,全球智能驾驶市场规模将在未来数年内快速增长,其中自动驾驶技术是市场的一大亮点。
这种技术将会带来更加安全、便利、舒适的出行体验,同时还能大大减少交通事故的发生。
据预测,在2025年左右,自动驾驶汽车的销售量将达到500万辆以上,市场总规模将达到5000亿美元。
在中国,随着政策和法规的逐步放宽,智能驾驶技术得到了越来越多的支持和推动。
特别是在“十四五”规划中,政府提出了推动数字化技术、智能化制造的目标,这无疑将会为智能驾驶技术带来更加广阔的市场前景。
据估计,未来几年,中国的智能驾驶市场将快速增长,市场规模有望在2023年达到500亿元左右。
三、未来展望智能驾驶技术的发展前景十分广阔,未来有望带来更加智能、绿色、安全、无障碍的出行环境。
基于人工智能的汽车驾驶辅助系统研究

基于人工智能的汽车驾驶辅助系统研究随着科技的不断进步,人工智能的应用越来越广泛,其中一个领域就是汽车行业。
在汽车行业中,人工智能最常见的应用就是汽车驾驶辅助系统。
汽车驾驶辅助系统指的是以人工智能技术为核心,帮助驾驶者完成驾驶操作、提升驾驶安全性和舒适性的装置或软件。
本文将从人工智能技术的应用、目前实现的辅助功能以及未来的发展方向等方面,对基于人工智能的汽车驾驶辅助系统进行探讨。
一、人工智能技术在汽车驾驶辅助系统中的应用人工智能不仅能够识别图像、语音和文字等感知信息,还能够进行自主决策和控制操作。
在汽车驾驶辅助系统中,人工智能技术主要应用在以下三个方面:1.感知技术:通过高精度传感器和视频监控设备,获取车辆和周围环境的信息,实现车辆的感知。
比较常见的有雷达、激光雷达、摄像头等传感器。
2.决策技术:利用人工智能算法对感知信息进行处理和分析,并产生决策结果,指导驾驶员的行为。
目前,主要采用的算法包括深度学习、强化学习、遗传算法等。
3.控制技术:利用电控系统、机械系统等方式,将决策结果转化为实际的控制动作,控制汽车的运动状态。
二、目前实现的汽车驾驶辅助功能人工智能的应用让汽车的驾驶辅助系统实现了很多新的功能,以更好地服务于行驶安全和驾驶舒适性。
现在我们来了解一下目前的实现的汽车驾驶辅助功能:1.自动泊车:利用车载摄像头和传感器等设备,实现无需驾驶员操控的停车,可以大大提高停车的效率和安全性。
2.自动驾驶巡航:通过自动感应车间距、限制速度等硬件设施,为驾驶员提供安全便利的驾驶环境。
3.车道偏移警示:高精度传感器和摄像头等技术,能够准确地感知车辆在道路上的行驶状态,并通过震动或报警来提醒驾驶员注意安全。
4.自动刹车:利用多种传感器、档案系统以及自动制动器,监测周围环境并自动刹车,避免车辆碰撞和伤害事故的发生。
5.远程协助:驾驶员在遭遇紧急情况时,有时会由于情况不熟悉或缺乏判断力而无法作出最合适的决策。
此时,系统可以帮助用户实时分析情况并提供相应的解决方案,方便驾驶员及时保障个人安全。
基于PreScan的AEB系统纵向避撞算法及仿真验证

基于PreScan的AEB系统纵向避撞算法及仿真验证胡远志;吕章洁;刘西【期刊名称】《汽车安全与节能学报》【年(卷),期】2017(008)002【摘要】采用自动紧急制动(AEB)可以辅助驾驶员避免纵向碰撞.该文对比了5种AEB算法对避免纵向碰撞仿真验证制动效果.以自动制动结束时的己车与前车的距离来判断制动效果的4种安全距离(AS)算法是:Mazda、Honda、Berkeley、SeungwukMoon;另一种是以即碰时间(TTC)为判断制动效果的TTC算法.在Simulink中运行的汽车主动安全的仿真平台PreScan上进行仿真验证.结果表明:在不干扰扰驾驶员正常驾驶前提下,这5种算法中,以即碰时间的TTC算法的纵向避撞性能最优.【总页数】7页(P136-142)【作者】胡远志;吕章洁;刘西【作者单位】汽车噪声振动和安全技术国家重点实验室,重庆理工大学,重庆400054,中国;汽车零部件先进制造技术教育部重点实验室,重庆理工大学,重庆400054,中国;汽车零部件先进制造技术教育部重点实验室,重庆理工大学,重庆400054,中国;汽车零部件先进制造技术教育部重点实验室,重庆理工大学,重庆400054,中国【正文语种】中文【中图分类】U461.91【相关文献】1.基于PreScan的AEB系统避撞策略的研究及验证 [J], 刘晓华2.基于 PreScan 的 AEB 系统避撞策略的研究及验证 [J], 刘晓华3.考虑舒适性的AEB避撞算法及仿真验证 [J], 黄城;冀杰;陈琼红;种一帆;唐雨4.考虑舒适性的AEB避撞算法及仿真验证 [J], 黄城;冀杰;陈琼红;种一帆;唐雨5.基于模糊控制的车辆主动避撞系统及仿真验证 [J], 李文礼;郭文博;石晓辉;陆宇;张友松因版权原因,仅展示原文概要,查看原文内容请购买。
高级驾驶辅助系统硬件在环测试平台研究

文献标识码:A
文章编号:1004⁃373X(2021)20⁃0065⁃04
Research on hardware⁃in⁃loop test platform for advanced driving assistance system
ZHEN Gang1,ZHANG Chaoyang1,ZU Zhaofei1,KONG Zuo2
(1. Shanghai Institute of Technology,Shanghai 201418,China;2. Shanghai Ding Auto Technology Co.,Ltd,Shanghai 200240,China)
Abstract:In an effort to realize the simulation test of advanced driving assistance system and solve the problems of high cost,long cycle and complex test site in the traditional car verification,ADAS HIL test platform for SAE level 2 was built. The test platform framework was built by utilizing the hardware ⁃ in ⁃ the ⁃ loop technology. The simulation test platform based on dSPACE is proposed,in which the hardware⁃in⁃the⁃loop simulation test method and real⁃time virtual simulation technology were adopted. The hardware of the platform includes dSPACE hardware, upper computer, driver, ADAS controller and Vector hardware. The software of the platform includes Carsim,Matlab / Simulink,CANoe and dSPACE software. On the basis of the CCRs test condition of China New Car Evaluation Regulation (C ⁃ NCAP),as the test object,the function of a mass produced ADAS controller equipped with Buick VELITE6 CMB/FCW was verified. The results indicate that the hardware⁃in⁃the⁃loop test platform can meet the functional requirements for mass production of the ADSA controller under test,which proves that the test platform can test and analyze the developed ADAS controller,shorten the development cycle,and has high economy. It has laid a good foundation for further development and test of vehicle ADAS.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10.16638/ki.1671-7988.2019.09.014基于Prescan的智能驾驶辅助系统在环研究赵伊齐,张引,申成刚,王严(华晨汽车工程研究院,辽宁沈阳110141)摘要:为在短时间内完成大量验证高级驾驶辅助系统的产品性能,利用Prescan对控制器进行软件在环研究。
首先对产品的性能及功能规范提出开发需求,作为测试依据;利用仿真软件Prescan完成测试场景及动力学模型的搭建;运用Matlab/Simulink实现自动化测试。
结果表明,利用Prescan进行软件在环测试,可缩短开发周期,减少开发成本,有效提高产品性能。
关键词:高级驾驶员辅助系统;软件在环;自动化测试中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)09-47-04Research on the loop of Advanced driver assistance systembased on PrescanZhao Yiqi, Zhang Yin, Shen Chenggang, Wang Yan( Brilliance Auto R&D Center, Liaoning Shenyang 110141 )Abstract: In order to complete a large number of product performance verification of advanced driving assistance system in a short time, Prescan was used to study the controller software in the loop. Firstly, the development requirements of product performance and functional specifications are proposed as the test basis. The simulation software Prescan was used to build the test scene and dynamic model. Matlab/Simulink for automated testing. The results show that using Prescan can shorten the development cycle, reduce the development cost and improve the product performance.Keywords: Driving assistance system; Software in the loop; TestautomationCLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)09-47-04前言高级驾驶员辅助系统(以下简称ADAS)是一项提高安全系数的主动安全技术,其主要通过传感器完成对周围信号的采集、CAN等通讯系统完成相关信号的传递。
最后将信号传送给整车控制器,使驾驶员能够在最快时间内察觉可能发生的情况。
目前,很多在研究高级驾驶员辅助系统设计环节中引入在环仿真测试,主要有模型在环(Model in the loop,以下简称MIL)、软件在环(Software in the loop,以下简称SIL)及硬件在环(Hardware in the loop,以下简称HIL)。
MIL 主要验证控制模型,其控制算法模型是否准确实现功能要求;SIL旨在通过PC验证代码实现的功能是否实现功能需求;HIL是将被控对象模型放在模拟整车环境下进行测试。
SIL 可实现被控模型算法的在线或离线仿真,减少实际代码的调试,从而降低成本[1]。
本文利用Prescan对控制器软件进行软件在环测试,将对产品提出的功能需求以及安全需求作为测试用例并作为仿真测试依据,利用Prescan完成测试场景以及传感器模型的搭建;将模型代码以S function的形式进行封装并通过simu -link进行比较;最后基于Matlab完成M文件的编写,实现控制器软件的自动化测试。
作者简介:赵伊齐,工程师,就职于华晨汽车工程研究院,从事自动驾驶系统软件测试工作。
项目基金:*国家重点研发计划(2016YFB0101107)资助。
汽车实用技术1 软件在环当前ECU开发流程一般是工程师根据控制目标开发控制模型,由控制模型生成控制代码(或者手工编写控制代码),将代码导入ECU硬件然后通过模型仿真被控对象及系统环境进行硬件在环测试(HIL)。
软件在环仿真(SIL)测试可通过特定的控制软件设置ECU的相关信号代替HIL中的硬件,并将待测ECU代码信息集成配置为虚拟ECU,通过运行虚拟控制器中的I/O模型和系统环境中的车辆模型来模拟控制器所需的各种传感器信号,并接收虚拟ECU发出的控制信号及台架传感器的信号。
从而与被测ECU的代码信息和系统环境模型连接。
最终实现闭环仿真,完成对控制系统进行测试验证。
由于目前许多汽车公司已经从传统的开发模式转移到V 形开发模型(如图1),以减少重复的代码编制和实车试验[2]。
在V形开发模式下,通过SIL平台一方面可在开发过程中更早介入,确保前期开发过程中通过对嵌入式软件的测试及时发现存在的问题,以提高整改效率从而大幅节约ECU功能开发成本和周期;另一方面,由于SIL测试采用纯软件仿真的手段,无需真实车辆及HIL台架测试。
可在开发和测试过程中灵活使用,因而软件在环测试系统正在成为一种理想的功能测试工具。
图1 V形开发模型2 仿真软件Prescan是一款用于高级驾驶员辅助系统和主动安全系统开发验证的仿真软件,支持基于摄像头、雷达、激光雷达等多种应用功能的开发应用。
包含场景搭建、传感器建模、开发控制算法以及运行仿真(如图2)。
其中场景搭建可利用prescan自带软件库对道路、交通使用者、环境模型以及天气光照等车辆周边环境因素的搭建(如图2);实现高级驾驶员辅助系统的前提即为可实时获取周边交通以及环境信息,Prescan可通过模拟传感器并保证与真实传感器功能一致。
传感器建模主要是针对摄像头、雷达/毫米波雷达以及车联网短程通讯传感器的模型仿真,根据ECU软件提供的传感器类型可运用Prescan对摄像头和雷达进行不同程度上的仿真。
开发控制算法即通过仿真平台(Matlab/Simulink),可引入编程工具开发的算法代码。
本文利用控制器软件算法作为输入端接收传感器模型输入的传感器信号,经过算法计算作为输出端发送请求指令给车辆动力学模型[3]。
动力学通过接收的请求指令做出响应形成驾驶场景,形成一个闭合的在环测试,从而达到验证控制器算法的目的,即为软件在环测试。
动力学模型可在Prescan自带demo基础上通过更改模型参数(主要指底盘、传动系统和发动机,具体可参考图3)或者直接通过第三方仿真软件直接插入得到理想动力学模型[4]。
图2 运行仿真图3 动力学模型3 SIL测试流程3.1 SIL测试基于SIL平台,测试人员可根据不同的功能需求实现以下测试:(1)手工测试手工测试也称交互式测试。
通常利用SIL系统配置相应的仿真面板GUI,从而直接控制变量输入,并通过仿真面板的控界面直接观察输出量的变化是否符合要求[5]。
Prescan仿真软件提供多种GUI单元。
用户可以通过简单的拖放操作来创建及调试GUI(如图4)。
图4 手工测试手工测试操作具有较好的问题处理能力,能通过人为的逻辑判断校验当前步骤的功能实现正确与否。
赵伊齐等:基于Prescan的智能驾驶辅助系统在环研究(2)自动化测试在仿真平台Prescan基础上利用Matlab编写脚本文件M.驱动仿真,通过配置完成代码覆盖率程度测试[6]。
在不同SIL系统中,虽然配套使用的应用软件不同,但均可通过编写并运行脚本实现自动测试的目的。
通常,不同的测试平台需要准备不同的测试脚本,测试脚本可随时修改调用以方便执行测试。
脚本编辑完成后,SIL可对控制器实现自动测试,并在自动测试完成后由应用软件自动生成相应的测试报告,下图为不同传感器扫描范围所得到结果[7]。
控制器功能测试需进行回归测试和重复测试,为节约测试成本以及提高测试效率。
大部分功能测试建议采用自动测试来完成。
下图5即为驾驶辅助系统在Prescan完成自动化测试所得到的结果。
图5 驾驶辅助系统自动化测试结果3.2 测试流程本文基于MATLAB和Simulink平台完成自动化测试,SIL的具体测试流程如下:3.2.1 测试计划系统开发工程师对产品分别提出性能及功能上的需求,供应商根据需求制定软件版本释放计划,SIL测试人员根据软件释放计划和功能集成情况制定相应测试计划及方案[8]。
3.2.2 测试需求根据SIL测试计划制定测试需求,主要包括:测试样件需求、工具需求和文件需求。
(1)测试样件需求:根据开发工程师提出的产品需求,提供相应的控制器算法、对应接口及软件版本号;(2)工具需求:根据SIL测试的搭建需求制定工具需求列表;(3)文件需求:整车模型参数(底盘、传动以及发动机相关参数)及产品性能规范。
3.2.3 接收测试文件测试人员在每一轮软件释放时间节点接收测试软件,若测试软件无更新,则开发工程师需要提前告知测试人员并不用再重新提交。
测试人员需要对接收的测试软件进行登记并管理[9]。
3.2.4 执行测试SIL测试包括及用户功能测试、回归测试。
用户功能测试主要针对控制器的功能进行测试;回归测试主要是验证上一轮测试或更早之前发现的问题是否被解决;(1)测试人员按照每一轮软件释放的SIL测试计划和测试目标执行测试任务;(2)根据SIL测试任务筛选测试用例;(3)SIL场景搭建;1)将测试用例提出的测试前提作为环境搭建依据;2)完成虚拟道路、交通设施等元素的搭建;3)完成虚拟传感器及车辆动力学模型建模;4)修改动力学参数或利用动力学工具,利用外部接口,进行模型载入[10]。
(4)利用脚本驱动仿真,通过配置或者软件编写自动化测试模块,执行自动化测试;(5)编写脚本文件,自动生成测试报告,报告应包含以下内容:a)本轮SIL测试的时间计划概况;b)本轮SIL测试软件的版本概况;c)本轮SIL测试的目标;d)本轮SIL集成测试的结果;e)本轮SIL集成测试的问题概况。
每轮测试阶段完成后,都需要提交本轮SIL测试报告。
3.2.5 分析测试结果测试工程师应按照测试用例执行测试,做好每一条测试结果记录,将测试用例给定的期望结果与测试结果进行对比,通过记为“OK”,未通过记为“NO”并描述实际测试结果,当前SIL状态或者样件状态无法满足测试的记录为“NP”(Not Possible)。