s计数器指令
S7200指令详解

S7-200指令详解PLC在运行时需要处理的数据一般都根据数据的类型不同、数据的功能不同而把数据分成几类。
这些不同类型的数据被存放在不同的存储空间,从而形成不同的数据区。
S7-200的数据区可以分为数字量输入和输出映像区、模拟量输入和输出映像区、变量存储器区、顺序控制继电器区、位存储器区、特殊存储器区、定时器存储器区、计数器存储器区、局部存储器区、高速计数器区和累加器区。
3.1 S7-200的数据区1. 数字量输入和输出映象区(1) 数字量输入映像区(I区)数字量输入映像区是S7-200 CPU为输入端信号状态开辟的一个存贮区,用I表示。
在每次扫描周期的开始,CPU对输入点进行采样,并将采样值存于输入映像区寄存器中。
该区的数据可以是位(1bit)、字节(8bit)、字(16bit)或者双字(32bit)。
其表示形式如下。
·用位表示I0.0、I0.1、…I0.7I1.0、I1.1、…I1.7…I15.0、I15.1、…I15.7共l28点。
输入映像区每个位地址包括存储器标识符、字节地址及位号三部分。
存储器标识符为“I”,字节地址为整数部分,位号为小数部分。
比如Il.0表明这个输入点是第1个字节的第0位。
·用字节表示IB0、IB1、…IB15共l6个字节。
输入映像区每个字节地址包括存储器字节标识符、字节地址两部分。
字节标识符为“IB”,字节地址为整数部分。
比如IB1表明这个输入字节是第1个字节,共8位,其中第0位是最低位,第7位是最高位。
·用字表示IW0、IW2、…IW14共8个字。
输入映像区每个字地址包括存储器字标识符、字地址两部分。
字标识符为“IW”,字地址为整数部分。
一个字含两个字节,一个字中的两个字节的地址必须连续,且低位字节在一个字中应该是高8位,高位字节在一个字中应该是低8位。
比如,IW0中的IB0应该是高8位,IB1应该是低8位。
·用双字表示ID0、ID4、…ID12共4个双字。
西门子PLCS高速计数器指令用法

高速计数器计数器输入/输出操作数数据类型N常数(0,1,2,3,4或5)字内存范围错误S7-200 CPU指令支持SIMATIC/国际助记符数据范围CPU内存中的指令大小编址内存高速计数器(HSC)指令根据HSC特殊内存位的状态配置和控制高速计数器。
参数N指定高速计数器的号码。
高速计数器最多可配置为十二种不同的操作模式。
每台计数器在功能受支持的位置有专用时钟、方向控制、复原和起始输入。
对于双相计数器,两个时钟均可按最高速度运行。
在正交模式中,您可以选择一倍\(1x)或四倍(4x)的最高计数速率。
所有的计数器按最高速率运行,而不会相互干扰。
注释:CPU 221和CPU 222支持4台高速计数器 (HSC0、HSC3、HSC4、HSC5)CPU 221和CPU 222不支持HSC1和HSC2CPU 224、CPU224XP、CPU 226支持6台高速计数器 (HSC0至HSC5)您可以为每台高速计数器使用一条"高速计数器定义"指令。
文档光盘中"提示与技巧"中的第4条提示和第29条提示提供使用高速计数器的程序。
设置ENO = 0的错误条件:0001 HSC在HDEF之前0005 HSC/PLS同步程序举例LAD FBDSTL NETWORK 1 // 主程序// 首次扫描时,调用SBR_0LD SM0.1CALL SBR_0NETWORK 1 // 子程序0开始// 配置HSC1LD SM0.1 // 首次扫描时MOVB 16#F8 SMB47 // 配置HSC1:// - 启用计数器// - 写入新当前值// - 写入新预设值// - 将初始方向设为向上计数// - 选择现用水平高的起始和复原输入// - 选择4x模式HDEF 1 11 // 将HSC1配置为正交模式,// 具有复原和起始输入功能MOVD +0 SMD48 // 清除HSC1的当前值MOVD +50 SMD52 // 将HSC1预设值设为50ATCH INT_0 13 // HSC1当前值 = 预设值(事件13)// 附加在中断例行程序INT_0上ENI// 全局中断启用HSC 1 // 程序HSC1NETWORK 1 // 中断0开始LD SM0.0MOVD +0 SMD48 // 清除HSC1的当前值MOVB 16#C0 SMB47 // 选择仅写入一个新当前值,// 使HSC1保持启用状态HSC 1 // 程序HSC1另请参阅:识别高速计数器指令HSC向导HDEF指令。
电气控制与Plc第5章-S7-200-PLC的基本指令及程序设计
KA2
(M0.1)
KM2
(Q0.1)
KM1
(Q0.0)
KM2
(Q0.1)
KA1
(M0.0)
图5-4 电气原理图
LD M0.0 A I0.0 = Q0.0
LD Q0.0
AN M0.1
=
Q0.1
AN Q0.1
=
M0.0
(a) 梯形图
图5-5 触点串联指令编程使用举例
(b) 语句表
触点并联指令使用说明:
EXIT
5.1.2 触点串连指令
与指令:用于单个常开触点的串联连接。 指令格式:A bit
与反指令:用于单个常闭触点的串联连接。 指令格式:AN bit
例3-2 触点串联指令的应用举例。图5-4为电气原理图(已标 地址),图5-5为对应的梯形图和语句表。
KA1
(M0.0)
SB
(I0.0)
KM1
EXIT
5.1.9 逻辑堆栈操作指令
S7-200 PLC使用了一个9层堆栈来处理所有逻辑操作, 逻辑堆栈指令主要用来完成对触点进行的复杂连接,配 合ALD、OLD指令使用。
1.指令
1)逻辑入栈指令 指令格式:LPS
2)逻辑读栈指令 指令格式:LRD
3)逻辑出栈指令 指令格式:LPP
4)装入堆栈指令 指令格式:LDS n
I0.1 I0.2 Q0.1,Q0.2
(b) STL
(c) 时序图
图5-14 S/R指令使用举例
EXIT
S/R指令使用说明
➢S/R指令的操作数为:I、Q、M、SM、T、C、V、S和 L。 ➢ N的常数范围为1~255,N也可为:VB、IB、QB、 MB、SMB、SB、LB、AC、常数、*VD、*AC和*LD。 一般情况下使用常数。 ➢ 对位元件来说一旦被置位,就保持在通电状态,除非对 它复位;而一旦被复位就保持在断电状态,除非再对它置 位。
s7200指令

第四章 S7-200的基本指令4.1位操作指令位操作类指令,主要是位操作及运算指令,同时也包含与位操作密切相关的定时器和计数器指令等。
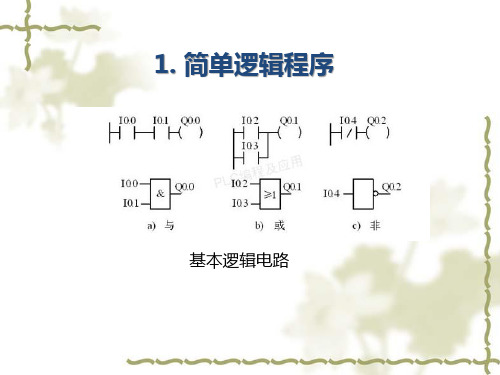
位操作指令是PLC常用的基本指令,梯形图指令有触点和线圈两大类,触点又分常开触点和常闭触点两种形式;语句表指令有与、或及输出等逻辑关系,位操作指令能够实现基本的位逻辑运算和控制。
一、位操作指令介绍1.逻辑取(装载)及线圈驱动指令LD/LDN(1)指令功能LD(load):常开触点逻辑运算的开始。
对应梯形图则为在左侧母线或线路分支点处初始装载一个常开触点。
LDN(load not):常闭触点逻辑运算的开始(即对操作数的状态取反),对应梯形图则为在左侧母线或线路分支点处初始装载一个常闭触点。
=(OUT):输出指令,对应梯形图则为线圈驱动。
(2)指令格式如图 4-1 所示。
梯形图语句表网络 1LD I0.0 //装载常开触点= Q0.0 //输出线圈网络2LDN I0.0 //装载常闭触点= M0.0 //输出线圈图 4-1 LD/LDN、OUT 指令的使用2.触点串联指令 A(And)、AN(And not)(1)指令功能 A(And):与操作,在梯形图中表示串联连接单个常开触点。
AN(And not):与非操作,在梯形图中表示串联连接单个常闭触点。
(2)指令格式如图 4-2 所示梯形图语句表网络 1LD I0.0 //装载常开触点A M0.0 //与常开触点= Q0.0 //输出线圈网络2LD Q0.0 //装载常开触点AN I0.1 //与常闭触点= M0.0 //输出线圈A T37 //与常开触点= Q0.1 //输出线圈图 4-2 A/AN 指令的使用3.触点并联指令:O(Or)/ON(Or not)(1)指令功能 O:或操作,在梯形图中表示并联连接一个常开触点。
ON:或非操作,在梯形图中表示并联连接一个常闭触点。
(2)指令格式如图 4-3 所示梯形图语句表网络 1LD I0.0O I0.1ON M0.0= Q0.0网络 2LDN Q0.0A I0.2O M0.1AN I0.3O M0.2= M0.1图 4-3 O/ON 指令的使用4.电路块的串联指令ALD(1)指令功能 ALD:块“与”操作,用于串联连接多个并联电路组成的电路块。
s7-300PLC编程语句手册汇总

s7-300PLC编程语句手册汇总S7-300是一种可编程控制器,它有自己的编程语言和指令系统。
在使用S7-300进行编程时,需要了解其语言和指令系统的特点和用法。
S7-300的编程语言包括LAD(梯形图)、FBD(功能块图)和STL(结构化文本语言)。
其中,LAD是最常用的一种语言,它使用梯形图形式来表示程序的逻辑关系。
FBD则是一种图形化的编程语言,它使用不同的功能块来表示程序的逻辑关系。
STL则是一种类似于C语言的文本语言,它使用结构化的语法来表示程序的逻辑关系。
S7-300的指令系统包括基本指令和扩展指令。
基本指令包括逻辑指令、算术指令、移位指令等,用于实现程序的基本功能。
扩展指令则是在基本指令的基础上进行扩展,用于实现更加复杂的功能。
在使用S7-300进行编程时,需要根据具体的应用场景选择合适的编程语言和指令。
同时,还需要注意编程的规范和标准,以确保程序的可靠性和稳定性。
总之,S7-300的编程语言和指令系统是其核心功能之一,掌握其特点和用法对于进行编程工作非常重要。
在实际应用中,需要根据具体的需求和要求,选择合适的编程语言和指令,以实现程序的优化和效率提升。
STEP 7编程语言介绍STEP 7是一种用于编程可编程逻辑控制器(PLC)的工具。
它被广泛应用于自动化控制系统中,包括工厂自动化、机器人控制、物流自动化、建筑自动化等领域。
数据类型在STEP 7中,有多种数据类型可供使用,包括整型、浮点型、布尔型、字符型等。
这些数据类型可用于存储和处理不同类型的数据,以满足不同的应用需求。
参数数据类型在编写PLC程序时,需要指定参数的数据类型。
这些参数可以是输入、输出或内部数据。
参数的数据类型决定了它们可以存储的数据类型,以及它们可以执行的操作。
PLC用户存储区的分类及功能PLC用户存储区是用于存储程序和数据的区域。
它可以分为程序存储区和数据存储区。
程序存储区用于存储PLC程序,而数据存储区用于存储程序中使用的数据。
可编程序控制器原理与应用基础 第3版 第4章 S7-200SMART指令系统

1
第4章 S7-200 SMART PLC
的指令系统
4.1 位逻辑指令 4.2 定时器和计数器指令 4.3 比较、传送及移位指令 4.4 数学运算指令 4.5 逻辑运算指令与转换指令 4.6 程序控制指令 4.7 逻辑堆栈指令
2
4.1 位逻辑指令
一、触点指令
位逻辑指令是对存储器或寄存器的“位”进行操作的指令。
VB33 7 6 5 4 3 2 1 0
VB33 7 6 5 4 3 2 1 0
VB34 7 6 5 4 3 2 1 0
VB34 7 6 5 4 3 2 1 0
VB35 7 6 5 4 3 2 1 0
N = +14
x SM1.1
VB35 7 6 5 4 3 2 1 0
N = - 14
DATA
24
例如:
3
二、取非指令
取非指令没有操作数,只是改变能流的状态。 能流到达取非触点时就停止;能流未到达取非触点时就通过。
举例:
将 I0.0 和 I0.1 的反变量相与的结果取非后,存在 Q0.0中。
4
三、正跳变和负跳变指令(微分指令)
正跳变和负跳变指令是用于检测输入信号的变化的指令, 统称为微分指令。
VD200 4 <=R
—12.6 I0.2
MB0 = =B MB2
I0.0
V30.0
( R)
8
Q1.0
()
V20.0
( S)
8
Q0.0
( R)
8
18
二、传送指令
19
三、移位指令
20
四、循环移位指令
循环右移前
SM1.1
21
S7300(STL)指令
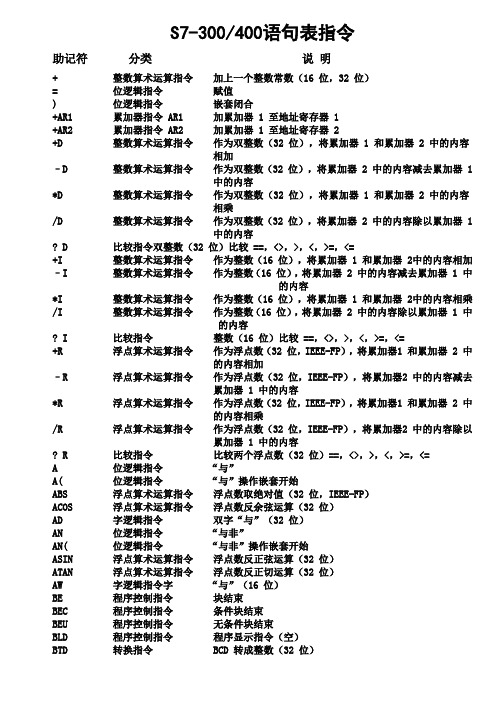
S7-300/400语句表指令助记符分类说明+ 整数算术运算指令加上一个整数常数(16 位,32 位)= 位逻辑指令赋值) 位逻辑指令嵌套闭合+AR1 累加器指令 AR1 加累加器 1 至地址寄存器 1+AR2 累加器指令 AR2 加累加器 1 至地址寄存器 2+D 整数算术运算指令作为双整数(32 位),将累加器 1 和累加器 2 中的内容相加–D 整数算术运算指令作为双整数(32 位),将累加器 2 中的内容减去累加器 1中的内容*D 整数算术运算指令作为双整数(32 位),将累加器 1 和累加器 2 中的内容相乘/D 整数算术运算指令作为双整数(32 位),将累加器 2 中的内容除以累加器 1中的内容D 比较指令双整数(32 位)比较 ==,<>,>,<,>=,<=+I 整数算术运算指令作为整数(16 位),将累加器 1 和累加器 2中的内容相加–I 整数算术运算指令作为整数(16 位),将累加器 2 中的内容减去累加器 1 中的内容*I 整数算术运算指令作为整数(16 位),将累加器 1 和累加器 2中的内容相乘/I 整数算术运算指令作为整数(16 位),将累加器 2 中的内容除以累加器 1 中的内容I 比较指令整数(16 位)比较 ==,<>,>,<,>=,<=+R 浮点算术运算指令作为浮点数(32 位,IEEE-FP),将累加器1 和累加器 2 中的内容相加–R 浮点算术运算指令作为浮点数(32 位,IEEE-FP),将累加器2 中的内容减去累加器 1 中的内容*R 浮点算术运算指令作为浮点数(32 位,IEEE-FP),将累加器1 和累加器 2 中的内容相乘/R 浮点算术运算指令作为浮点数(32 位,IEEE-FP),将累加器2 中的内容除以累加器 1 中的内容R 比较指令比较两个浮点数(32 位)==,<>,>,<,>=,<=A 位逻辑指令“与”A( 位逻辑指令“与”操作嵌套开始ABS 浮点算术运算指令浮点数取绝对值(32 位,IEEE-FP)ACOS 浮点算术运算指令浮点数反余弦运算(32 位)AD 字逻辑指令双字“与”(32 位)AN 位逻辑指令“与非”AN( 位逻辑指令“与非”操作嵌套开始ASIN 浮点算术运算指令浮点数反正弦运算(32 位)ATAN 浮点算术运算指令浮点数反正切运算(32 位)AW 字逻辑指令字“与”(16 位)BE 程序控制指令块结束BEC 程序控制指令条件块结束BEU 程序控制指令无条件块结束BLD 程序控制指令程序显示指令(空)BTD 转换指令 BCD 转成整数(32 位)BTI 转换指令 BCD 转成整数(16 位)CAD 转换指令 Change Byte Sequence in ACCU 1 (32-bit) CALL 程序控制指令块调用CALL 程序控制指令调用多背景块CALL 程序控制指令从库中调用块CAR 装入/传送指令交换地址寄存器 1 和地址寄存器 2 的内容CAW 转换指令 Change Byte Sequence in ACCU 1-L(16-bit) CC 程序控制指令条件调用CD 计数器指令减计数器CDB 转换指令交换共享数据块和背景数据块CLR 位逻辑指令 RLO 清零(=0)COS 浮点算术运算指令浮点数余弦运算(32 位)CU 计数器指令加计数器DEC 累加器指令减少累加器 1 低字的低字节DTB 转换指令双整数(32 位)转成 BCDDTR 转换指令双整数(32 位)转成浮点数(32 位,IEEE-FP)ENT 累加器指令进入累加器栈EXP 浮点算术运算指令浮点数指数运算(32 位)FN 位逻辑指令脉冲下降沿FP 位逻辑指令脉冲上升沿FR 计数器指令使能计数器(任意)(任意,FR C 0 - C 255)FR 定时器指令使能定时器(任意)INC 累加器指令增加累加器 1 低字的低字节INVD 转换指令对双整数求反码(32 位)INVI 转换指令对整数求反码(16 位)ITB 转换指令整数(16 位)转成 BCDITD 转换指令整数(16 位)转成双整数(32 位)JBI 跳转指令若 BR = 1,则跳转JC 跳转指令若 RLO = 1,则跳转JCB 跳转指令若 RLO = 1 且 BR= 1,则跳转JCN 跳转指令若 RLO = 0,则跳转JL 跳转指令跳转到标号JM 跳转指令若负,则跳转JMZ 跳转指令若负或零,则跳转JN 跳转指令若非零,则跳转JNB 跳转指令若 RLO = 0 且 BR= 1,则跳转JNBI 跳转指令若 BR = 0,则跳转JO 跳转指令若 OV = 1,则跳转JOS 跳转指令若 OS = 1,则跳转JP 跳转指令若正,则跳转JPZ 跳转指令若正或零,则跳转JU 跳转指令无条件跳转JUO 跳转指令若无效数,则跳转JZ 跳转指令若零,则跳转L 装入/传送指令装入L DBLG 装入/传送指令将共享数据块的长度装入累加器 1 中L DBNO 装入/传送指令将共享数据块的块号装入累加器 1 中L DILG 装入/传送指令将背景数据块的长度装入累加器 1 中L DINO 装入/传送指令将背景数据块的块号装入累加器 1 中L STW 装入/传送指令将状态字装入累加器 1L 定时器指令将当前定时值作为整数装入累加器 1(当前定时值可以是0 – 255 之间的一个数字,例如 L T 32)L 计数器指令将当前计数值装入累加器 1(当前计数值可以是 0 –255之间的一个数字,例如 L C15)LAR1 装入/传送指令将累加器 1 中的内容装入地址寄存器 1LAR1 <D> 装入/传送指令将两个双整数(32 位指针)装入地址寄存器 1LAR1 AR2 装入/传送指令将地址寄存器 2 的内容装入地址寄存器 1LAR2 装入/传送指令将累加器 2 中的内容装入地址寄存器 1LAR2 <D> 装入/传送指令将两个双整数(32 位指针)装入地址寄存器 2LC 计数器指令将当前计数值作为 BCD 码装入累加器 1(当前计数值可以是 0 – 255 之间的一个数字,例如 LC C 15)LC 定时器指令将当前定时值作为 BCD 码装入累加器 1(当前定时值可以是 0 – 255 之间的一个数字,例如 LC T 32)LEAVE 累加器指令离开累加器栈LN 浮点算术运算指令浮点数自然对数运算(32 位)LOOP 跳转指令循环MCR( 程序控制指令将 RLO 存入 MCR 堆栈,开始 MCR)MCR 程序控制指令结束 MCRMCRA 程序控制指令激活 MCR 区域MCRD 程序控制指令去活 MCR 区域MOD 整数算术运算指令双整数形式的除法,其结果为余数(32 位)NEGD 转换指令对双整数求补码(32 位)NEGI 转换指令对整数求补码(16 位)NEGR 转换指令对浮点数求反(32 位,IEEE-FP)NOP 0 累加器指令空指令NOP 1 累加器指令空指令NOT 位逻辑指令 RLO 取反O 位逻辑指令“或”O( 位逻辑指令“或”操作嵌套开始OD 字逻辑指令双字“或”(32 位)ON 位逻辑指令“或非”ON( 位逻辑指令“或非”操作嵌套开始OPN 数据块调用指令打开数据块OW 字逻辑指令字“或”(16 位)POP 累加器指令 POPPOP 累加器指令带有两个累加器的 CPUPOP 累加器指令带有四个累加器的 CPUPUSH 累加器指令带有两个累加器的 CPUPUSH 累加器指令带有四个累加器的 CPUR 位逻辑指令复位R 计数器指令复位计数器(当前计数值可以是 0 – 255 之间的一个数字,例如 R C 15)R 定时器指令复位定时器(当前定时值可以是 0 – 255 之间的一个数字,例如 R T 32)RLD 移位和循环移位指令双字循环左移(32 位)RLDA 移位和循环移位指令通过 CC 1 累加器 1 循环左移(32 位)RND 转换指令取整RND–转换指令向下舍入为双整数RND+ 转换指令向上舍入为双整数RRD 移位和循环移位指令双字循环右移(32 位)RRDA 移位和循环移位指令通过 CC 1 累加器 1 循环右移(32 位)S 位逻辑指令置位S 计数器指令置位计数器(当前计数值可以是 0 – 255 之间的一个数字,例如 S C 15)SAVE 位逻辑指令把 RLO 存入 BR 寄存器SD 定时器指令延时接通定时器SE 定时器指令延时脉冲定时器SET 位逻辑指令置位SF 定时器指令延时断开定时器SIN 浮点算术运算指令浮点数正弦运算(32 位)SLD 移位和循环移位指令双字左移(32 位)SLW 移位和循环移位指令字左移(16 位)SP 定时器指令脉冲定时器SQR 浮点算术运算指令浮点数平方运算(32 位)SQRT 浮点算术运算指令浮点数平方根运算(32 位)SRD 移位和循环移位指令双字右移(32 位)SRW 移位和循环移位指令字右移(16 位)SS 定时器指令保持型延时接通定时器SSD 移位和循环移位指令移位有符号双整数(32 位)SSI 移位和循环移位指令移位有符号整数(16 位)T 装入/传送指令传送T STW 装入/传送指令将累加器 1 中的内容传送到状态字TAK 累加器指令累加器 1 与累加器 2 进行互换TAN 浮点算术运算指令浮点数正切运算(32 位)TAR1 装入/传送指令将地址寄存器 1 中的内容传送到累加器 1TAR1 装入/传送指令将地址寄存器 1 的内容传送到目的地(32位指针)TAR1 装入/传送指令将地址寄存器 1 的内容传送到地址寄存器2TAR2 装入/传送指令将地址寄存器 2 中的内容传送到累加器 1TAR2 装入/传送指令将地址寄存器 2 的内容传送到目的地(32位指针)TRUNC 转换指令截尾取整UC 程序控制指令无条件调用X 位逻辑指令“异或”X( 位逻辑指令“异或”操作嵌套开始XN 位逻辑指令“异或非”XN( 位逻辑指令“异或非”操作嵌套开始XOD 字逻辑指令双字“异或”(32 位)XOW 字逻辑指令字“异或”(16 位)。
s7 200 for指令的用法
s7 200 for指令的用法S7200for指令是西门子PLC编程中常用的指令之一,用于实现循环执行一段程序的功能。
该指令提供了多种循环结构和循环控制方式,能够满足不同应用场景的需求。
本文将详细介绍S7200for指令的用法,帮助读者更好地掌握该指令的应用。
一、基本用法FOR(循环变量)=(起始值)TO(结束值)STEP(步长值)DO(循环体)其中,循环变量是用于标识循环计数器的标识符,起始值和结束值指定了循环计数器的范围,步长值指定了循环计数器的递增值。
循环体是需要重复执行的代码块。
使用S7200for指令时,需要注意以下几点:1.循环变量可以是整数或实数类型,但不能为负数。
2.循环计数器的范围可以根据实际需求进行调整,但必须满足结束值大于起始值且步长值大于等于零的条件。
3.循环体中的代码可以包括各种指令、语句和程序结构,如跳转、条件判断、数据读写等。
二、循环结构S7200for指令提供了三种循环结构:FOR循环、FOR…NEXT循环和WHILE循环。
这些循环结构可以根据实际需求选择使用。
1.FOR循环:适用于需要重复执行一段代码的场景,直到满足特定条件为止。
语法格式与FORDODO算法DO循环体的格式类似。
2.FOR…NEXT循环:该循环结构适用于需要对数据进行遍历的场景,常用于循环读取数组或列表中的元素。
语法格式为FOR变量名=起始值TO结束值DO算法LOOP和ENDLOOP。
3.WHILE循环:该循环结构适用于需要反复检查条件是否满足的场景,当条件满足时执行循环体中的代码,否则跳出循环。
语法格式为WHILE条件DO算法LOOP和ENDLOOP。
三、循环控制S7200for指令提供了多种循环控制方式,包括条件控制、时间控制和手动控制等。
1.条件控制:通过在循环体内添加条件判断语句,根据条件是否满足来决定是否跳出循环或继续执行循环体中的代码。
2.时间控制:通过设定循环执行的时间间隔或累计执行的时间,达到定时执行循环体的目的。
s7200计数器指令
s7-200计数器指令课堂教学教案2教学实践34CTU Cxxx,PV (1)梯形图指令符号中:CU为加计数脉冲输入端;CD为减计数脉冲输入端;R为加计数复位端;LD为减计数复位端;PV为预置值(2)Cxxx 为计数器的编号,范围为:C0~C255 (3)PV预置值最大范围:32767;PV的数据类型:INT;PV操作数为:VW, T, C, IW, QW, MW, SMW, AC, AIW, K(4)CTU/CTUD/CD 指令使用要点:STL形式中CU,CD,R,LD的顺序不能错;CU,CD,R,LD 信号可为复杂逻辑关系CTDCxxx,PVCTUDCxxx,PV2. 计数器工作原理分析(1)加计数器指令(CTU)当R=0时,计数脉冲有效;当CU端有上升沿输入时,计数器当前值加1。
当计数器当前值大于567【例4-4】加减计数器指令应用示例,程序及运行时序如图4-53所示。
LD I0.1LD I0.2LD I0.3CTUD C50,4I0.1I0.2I0.3C50当.C50状图4-53 加/减计数器应用示例【例4-5】减计数指令应用示例,程序及运行时序如图4-54所示。
在复位脉冲I1.0有效时,即I1.0=1时,当前值等于预置值,计数器的状8态位置0;当复位脉冲I1.0=0,计数器有效,在CD端每来一个脉冲的上升沿,当前值减1计数,当前值从预置值开始减至0时,计数器的状态位C-bit=1,Q0.0=1。
在复位脉冲I1.0有效时,即I1.0=1时,计数器CD端即使有脉冲上升沿,计数器也不减1计数。
LD I0.1LD I1.0CTD C4,3LD C4= Q0.0I0.1I1.0图4-54C4当前值C50减计数器应用示例910课堂教学教案3、安装配线(1)合理安排元件及PLC 位置并固定。
(2)按外部接线图进行配线、接线。
(3)注意电源的连接,不能出现短路现象。
4、程序设计、录入、监控与调试:(1)在电脑上进行程序的设计。
S-的指令
5.用数据类型为IEC_TIMER的变量提供背景数据
用3种定时器设计卫生间冲水控制电路。I0.7是光电开关检测到的有使用者
的信号,用Q1.2 控制冲水电磁阀。在符号地址为“定时器DB”的DB15中生
成数据类型为IEC_TIMER的变量T1、T2、T3,用它们提供定时器的背景数据。 从I0.7(有人使用)的上升沿开始,TON延时3s后其输出Q变为1状态,使
3.关断延时定时器指令 关断延时定时器(TOF)用于将Q输出的复位操作延时PT指定的一段时间。 IN输入电路接通时,输出Q为1状态,当前时间被清零。在IN的下降沿开始定 时,ET从0逐渐增大。ET等于预设值时,输出Q变为0状态,当前时间保持不 变,直到IN输入电路接通(见波形A)。关断延时定时器可以用于设备停机 后的延时。 如果ET未达到PT预设的值,IN输入信号就变为1状态,ET被清0,输出Q保 持1状态不变(见波形B)。复位线圈RT通电时,如果IN输入信号为0状态, 则定时器被复位,当前时间被清零,输出Q变为0状态(见波形C)。如果复 位时IN输入信号为1状态,则复位信号不起作用(见波形D)。
10.检测信号边沿指令 R_TRIG是“检测信号上升沿”指令,F_TRIG是“检测信号下降沿”指令。 它们是函数块,在调用时应为它们指定背景数据块。这两条指令将输入CLK的 当前状态与背景数据块中的边沿存储位保存的上一个扫描周期的CLK的状态进 行比较。如果指令检测到CLK的上升沿或下降沿,将会通过Q端输出一个扫描 周期的脉冲。 在输入CLK输入端的电路时,选中左侧的垂直“电源”线,双击收藏夹中的 “打开分支”按钮,生成一个串联电路。用鼠标将串联电路右端的双箭头拖拽 到CLK端。松开鼠标左键,串联电路被连接到CLK端。
2.加计数器 当接在R输入端的I1.1为0状态,在CU信号的上升沿,CV加1,直到达到指 定的数据类型的上限值用,CV的值不再增加。 CV大于等于PV时,输出Q为1状态,反之为0状态。第一次执行指令时, CV被清零。各类计数器的复位输入R为1状态时,计数器被复位,输出Q变为 0状态,CV被清零。
西门子s LC基本指令
~220V
FR1KM11来自:26KM2M1 M 3~
12
二、堆栈操作指令 用于完成复杂的语句表指令设置堆栈操作
19:26
13
三、定时器指令 S7-200 CPU22X 有三种定时器:TON、TONR、TOF
1、接通延时定器(TON)
Txx IN TON PT
•在输入(IN)收到能流时开始计时; •当当前值达到预置值(PT)时,定时器位被置1;
19:26
KM1 FR1 M1 M
3~
11
例3:正反转向电机起停控制
已知:正转向起动按钮信号接入I0.0 反转向起动按钮信号接入I0.11 停止按钮信号接入I0.2 电机正转运行命令由Q0.0输出、反转运行命令由Q0.0输出。
L1 L2 L3
I0.0
QS
I0.1 FU
I0.2
KM1
KM2
Q0.0
~220V Q0.1
19:26
19
19:26
20
四、计数器指令 1、增计数器指令(CTU)
Cxx CU CTU R PV
从当前计数值开始,在每一个(CU)输入状态从低到高时递 增计数。 •当Cxx的当前值大于等于预置值PV时,计数器位Cxx置位。 •当复位端(R)接通或者执行复位指令后,计数器被复位。 •当它达到最大值(32,767)后,计数器停止计数。
•下降沿触发单脉冲指令 N 当收到能流被断开时,产生一个扫描周期的能流输出;
I0.0 P
I0.0 N
Q0.0
()
Q0.1
()
I0.0 Q0.0 Q0.1
19:26
6
(2)线圈指令 ① 输出线圈指令
???
( ) ???位代表位地址
S7-300STL手册

A 与 A是常开点 与是串联关系
AN 与非 是串联常闭点
O 或 或是并联关系
ON 或非 是并联常闭点
X 异或
XN 异或非
O 先与后或 Βιβλιοθήκη A( 与 操作嵌套开始 AN( 与非 操作嵌套开始
O( 或 操作嵌套开始
ON( 或非 操作嵌套开始
LC 将当前定时器值作为BCD码装入累加器1
R 复位定时器
SP 脉冲定时器
SE 延时脉冲定时器
SD 延时接通定时器
SS 保持型延时接通定时器
SF 延时断开定时器
?D 比较两个双整数(32位)
?R 比较两个浮点数(32位)
3.转换指令
BTI BCD 转换整数(16位)
ITB 整数(16位)转成 BCD
BTD BCD 转成整数(32位)
ITD 整数(16位)转成双整数(32位)
DTB 双整数(32位)转成 BCD
DTR 双整数(32位)转成浮点数(32位,IEEE-FP)
INVI 对双整数求反码(16位)
INVD 对双整数求反码(32位)
NEGI 对整数求补码(16位)
NEGD 对双整数求补码(32位
NEGR 对浮点数求反(32位,IEEE-FP)
CAW 交换累加器1低字中的字节顺序(16位)
CAD 交换累加器1中的字节顺序(32位)
RND 取整
TRUNC 截尾取整
JCB 若 RLO=1,则连同BR一起跳转
JNB 若 RLO=0,则连同BR一起跳转
JBI 若 RLO=1,则跳转
JNBI 若 RLO=0,则跳转
codesys s指令用法

codesys s指令用法
CODESYS是一种用于编写和运行PLC(可编程逻辑控制器)程序的软件平台。
在CODESYS中,S指令是一种特殊类型的指令,用于执行速度控制和位置控制。
以下是使用CODESYS中的S指令的基本步骤:
1. 在PLC程序中定义变量:首先,需要在PLC程序中定义用于存储速度和位置的变量。
这些变量可以是整数、浮点数或实数,具体取决于控制要求。
2. 编写S指令:在CODESYS中,可以使用S指令来控制伺服电机的速度和位置。
S指令的语法如下:
```
S <速度变量>
```
其中,`<速度变量>`是之前定义的用于存储速度的变量。
3. 配置运动控制器:在使用S指令之前,需要配置运动控制器。
运动控制器是PLC中的一个特殊功能块,用于处理运动控制任务。
在CODESYS中,可以使用MC_MoveAbsolute或MC_MoveRelative等指令来配置运动控制器。
4. 运行程序:在完成上述步骤后,可以运行PLC程序。
当程序运行到S指令时,运动控制器将根据指定的速度变量来控制伺服电机的速度和位置。
需要注意的是,具体的S指令用法可能因不同的PLC型号和编程环境而有所不同。
因此,在使用CODESYS中的S指令时,建议参考PLC制造商提供的编程手册或用户指南,以确保正确使用S指令并获得预期的控制效果。
S7-300定时器与计数器指令[专业知识]
![S7-300定时器与计数器指令[专业知识]](https://img.taocdn.com/s3/m/2965692a31b765ce050814c2.png)
I0.0 Q4.0
1S 2S
行业相关
21
返回上级
【例3】
控制程序 (使用接通延时定时器)
控制程序 (使用脉冲定时器)
行业相关
22
返回上级
4. S_ODTS(保持型接通延时S5定时器)(1/3)
保持型接通延时S5定时器LAD及FBD指令
扩据脉冲S5定时器LAD及FBD指令
行业相关
13
返回上级
2. S_PEXT(扩展脉冲S5定时器)(2/3)
扩据脉冲S5定时器线圈指令
行业相关
14
返回上级
2. S_PEXT(扩展脉冲S5定时器)(3/3)
示例程序
工作波形
行业相关
15
返回上级
【例2】 扩展脉冲定时器应用——电动机延时自动关闭控 制。
成,按物流要求,当按动起动按钮S1时,皮带电机
Motor_2首先起动,延时5s后,皮带电机Motor_1自动
起动;如果按动停止按钮S2,则Motor_1立即停机,延
时
1
0
s
后,Motor_2自动停机。
S1 起动 S2 停止
Motor_1
电动机
Motor_2
电动机
行业相关
26
返回上级
【例4】
端子接线图
行业相关
27
返回上级
【例4】
I/O分配表
行业相关
28
返回上级
【例4】
控制程序(FBD)
控制程序(LAD)
行业相关
29
返回上级
5. S_OFFDT(断电延时S5定时器)(1/3)
S7200 PLC的指令系统计数器

当CU由ON变为OFF时,计数器当前值停止 计数,并保持当前值不变;如果CU又变为ON, 则计数器在当前值的基础上继续递增计数。
R为复位脉冲的输入端,当R端为ON时, 计数器复位,使计数器状态位为OFF,当前值 为0。可通过复位张指令树R使成CTU计数器复位。
增计数器
6.应用实例
I0.0 I0.1
C1
C1 CU CTU R 9 PV Q0.0
绍兴文理学院元培学院信息与电子系
1 LD I0.0 2 LD I0.1 3 CTU C1,9 4 LD C1 5 = Q0.0
张树成
增计数器
绍兴文理学院元培学院信息与电子系
I0.1
I0.0
8 9 ON
67
45
C1当前值 0 1 2 3
绍兴文理学院元培学院信息与电子系
S7-200CN可编程序控制器
计数器
张树成
计数器
绍兴文理学院元培学院信息与电子系
S7-200CN CPU226系列PLC普通计数器有3 种类型,总共256个计数器。
编号:C0~C255. 按特性的不同分为3类:
递增计数器 CTU 递减计数器 CTD 增减计数器 CTUD 说明:不能重复使用同一个计数器的线圈 编号,即每个计数器的线圈编号只 能使用一次。
OFF
Q0.0
张树成
增计数器
绍兴文理学院元培学院信息与电子系
当I0.0每闭合(“ON”)一次时,计数器计 数1次,当前值寄存器加1。如果当前值达到设定 值10次,C1动作,C1常开触点闭合、常闭触点断 开;I0.0继续闭合(“ON”)时,当前值继续递 增计数,最大可达到32767。
西门子sPLC基本指令(比较和表等)

用计数指令实现下述控制过程,其动作时序如 图所示:
当I0.2=ON从1#灯亮到3#灯亮,每灯亮3S。当3#灯亮 完达到1S后又从1#灯亮到3#灯亮如此循环下去。
三电机相隔5s启动,各运行10s停止,循环往复,绘出 三电机一周期运行如图所示
利用计数器与比较指令,设计一个24 小时可设定 定时时间的住宅控制器的控制程序(以30分钟为 一个设定单位),要求实现如下的控制:
AR>= IN1, IN2
OR>= IN1, IN2
指令应用举例
计数器C0的当前值大于或等于1000时,输出线 圈Q0.0通电。
实现如图所示的时序图。
用一个按钮开关(I0.0)控制三个灯(Q0.1,Q0.2, Q0.3),按钮按一下则1#灯亮,再按三下2#灯亮,1# 灯灭。再按三下3#灯亮,2#灯灭。再按三下是3#灯 灭。再按一下又重复前面的工作。时序图如图7所示以 此反复。
从左母线向右以触点开始,以线圈或指令盒结束, 构成一个梯级,触点不能出现在线圈右边 。在一 个梯级中,左右母线之间是一个完整的“电路”, 不允许短路、开路,也不允许“能流”反向流动。
• 梯形图编程的基本规则
在梯形图中与“能流”有关的指令盒或线圈不 能直接接在左母线上,通过触点接。与“能流” 无关的指令盒或线圈直接接在左母线上。如 LBL、SCR、SCRE等。
西门子sPLC基本指令(比较和表 等)
引例
交通灯控中,时间如果不到,则怎么办? 利用多个时间继电器进行不同时间段的控制 如果就用一个时间继电器怎么控制时段呢?
先进行时间继电器工作原理的分析:
I0.0 PT
T37当前值
最大值32767
S7-200系列plc基本指令及逻辑控制应用技术
三组抢答器梯形图:
//儿童组抢得逻辑,除 常闭触点Q1.2, Q1.3外 为基本启-保-停电路
//学生组抢得逻辑,除 常闭触点Q1.1, Q1.3外 为基本启-保-停电路
//教授组抢得逻辑,除 常闭触点Q1.1, Q1.2外 为基本启-保-停电路
//幸运抢得计时
//彩球逻辑,除定时器 T37触电外为基本 启-保-停电路
3) 按下鼓风机停止按钮I0.3, 鼓风机停止工作;
4) 按下引风机停止按钮I0.1, 引风机停止工作;
改进手动顺序起停控制梯形图:
1)把Q0.1的常开触点串联在Q0.2的支路当中, 使Q0.1得电之后,Q0.2才能得电;
2)把Q0.2的常开触点并联在Q0.1的支路当中, 使Q0.2失电之后,Q0.1才能失电;
最大当前值(s) 32.767 327.67 3276.7 32.767 327.67 3276.7
定时器号 T32,T96 T33-T36,T97-T100 T37-T63,T101-T225 T0,T64 T1-T4,T65-T68 T5-T31,T69-T95
定时时间的计算:T=PT×S(T为实际定时时间, PT为预设值,S为精度等级).
输入端口
输出端口
正向启动按钮:I0.0 停止按钮:I0.1
反向启动按钮:I0.2 正向限位开关:I0.3 反向限位开关:I0.4
正向运行控制 : Q0.0 反向运行控制: Q0.1
其他器件
自动往复限位控制梯形图:
自动往复限位控制带延时梯形图:
• 交流异步电动机Y-△降压起动PLC控制:
控制要求:一般大于7.5KW的交流异步电动机,在启动时常采用Y- △ 降压起动。要求按下启动按钮之后,电动机先进行星形连接启动,经 延时5s后,自动切换到三角形连接运转,按下停止按钮后,电动机停 止运转。
S71200 -1500指令说明和举例CTUD:加减计数

参数
下表列出了“加减计数”(Count up and down) 指令的参数:
参数
声明
数据类型
存储区
说明
S7-1200
S7-1500
CU
Input
BOOL
I、Q、M、 I、Q、M、
D、L 或常 D、L 或常 加计数输入
(例如 #MyIEC_COUNTER)
如果在单独的数据块中设置 IEC 计数器(单背景),则将默认使用“优化的块访问” (optimized block access) 创建背景数据块,并将各个变量定义为具有保持性。有关 在背景数据块中设置保持性的更多信息,请参见“另请参见”。
如果在函数块中使用“优化的块访问”(optimized block access) 设置 IEC 计数器作为 本地变量(多重背景),则其在块接口中定义为具有保持性。
计数器值可以一直递增,直到其达到输出 CV 处指定数据类型的上限。达到上限 后,即使出现信号上升沿,计数器值也不再递增。达到指定数据类型的下限后, 计数器值便不再递减。
输入 LD 的信号状态变为“1”时,将输出 CV 的计数器值置位为参数 PV 的值。只要 输入 LD 的信号状态仍为“1”,输入 CU 和 CD 的信号状态就不会影响该指令。
• IEC_COUNTER / IEC_UCOUNTER • IEC_DCOUNTER / IEC_UDCOUNTER • IEC_LCOUNTER / IEC_ULCOUNTER
可以按如下方式声明 IEC 计数器:
• 系统数据类型 IEC_<Counter> 的数据块声明(例如,“MyIEC_COUNTER”) • 声明为块中“Static”部分的 CTUD_<Data type> 或 IEC_<Counter> 类型的局部变量
-西门子S-系列PLC应用指令

-西门子S-系列PLC应用指令
2019/8/3
电气控制与PLC
OUT: ID、QD、VD、MD、SMD、SD、 LD、AC、*VD、*LD、*AC
2019/8/3
电气控制与PLC
2
高速计数器指令
用于对S7-200扫描速率无法控制的高速事件进行计数,最高计数频率取决于CPU的类 型。高速计数器指令包括定义高速计数器指令(HDEF)和高速计数指令(HSC)。 DEF指令:为指定的高速计数器HSCx选择操作模式,决定高速计数器的时钟、方向、 启动和复位功能,每一个高速计数器使用一条定义高速计数器指令。HDEF指令ENO=0 的错误条件为:输入点冲突(代码0003)、中断中的非法指令(0004)和HSC重复定义 (代码000A)。 HSC指令:在HSC特殊存储器位状态的基础上,配置和控制高速计数器,参数N指定 高速计数器的标号。高速计数器可以配置为12种模式中的任意一种(见表7-2)。每一个
2019/8/3
电气控制与PLC
10
发送和接收指令
通过编程,可以选择自由口模式来控制S7-200的串行通信口,当选择了自由口模式,用户程序通 过使用接收中断、发送中断、发送指令和接收指令来控制通信口的操作通信协议完全由梯形图程序 控制,SMB30(对于端口0)和SMB130(对于端口1)用于选择波特率和校验类型。 当S7-200处于STOP模式时,自由口模式被禁止,重新建立正常的通信。 只有当S7-200处于RUN模式时,才能进行自由口通信,使能自由口模式,应该在SMB30(端口0) 或者SMB130(端口1)的协议选择区设置01,处于自由口通讯模式时不能与编程设备通信。 可以使用特殊寄存器SM0.7来控制自由口模式,当SM0.7=0,开关处于TERM位置;SM0.7=1,开 关处于RUN位置。 SMB30和SMB130分别配置通信口0和通信口1,并且为自由口操作提供波特率、校验和数据位数 的选择,控制字节如图所示,每个配置都产生一个停止位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3/8
课 堂 教 学 教 案
授课章节名称 授 课 日 期
比较综合实训
课型 第 14 周 课时数
实验课 2
12 年 12 月 4 日
符 号
输出(O) 名 称 地址 注 释
地址
注 释
6/8
2.画硬件接线图 根据 I/O 分配,画出硬件接线图,接线图如下图所示。
3、安装配线 (1)合理安排元件及 PLC 位置并固定。 (2)按外部接线图进行配线、接线。 (3)注意电源的连接,不能出现短路现象。 4、程序设计、录入、监控与调试: (1)在电脑上进行程序的设计。 (2)将写好的指令程序输入 PLC 监控运行调试。 三、注意事项 1. 安全文明生产, 确保人身安全及 PLC 等元器件的安 全。操作时应以高度的责任心,集中注意力。 2. 插拔数据插头和接线时用力要适当, PLC 的表面不 能弄脏。 3. 通电试车必须经指导老师的同意并在老师在场的 情况下进行,不能出现短路现象。 4. 训练过程中,要分工协作,共同提高。 四、分组训练 线路安装与程序的调试同时进行。每组由小组长 带领,分成两小组,每小组 2-3 人。一组完成线路安 装、程序的输入与调试,一组完成工作页上的内容, 第一组完成练习后交换进行。 1.注意检查、纠正接线中存在的错误。 2.注意及时纠正有可能对 PLC 造成损害的错误操作。 3.检查配线是否正确,正确指导学生进行通电试验及 安全文明操作。 4.及时发现训练中存在的问题,了解每个同学的掌握 情况并对训练情况给出评价。 结束指导: 1.点评各组完成的情况及表现。 2.指出在实训过程中普遍存在的问题并集中解答, 7/8
2/8
能错;CU,CD,R,LD 信 号可为复杂逻辑关系
2. 计数器工作原理分析 (1)加计数器指令(CTU) 当 R=0 时,计数脉冲有效; 当 CU 端有上 升沿输入时,计数器当前值加 1。当计数器当前 值大于或等于设定值(PV)时,该计数器的状态 位 C-bit 置 1, 即其常开触点闭合。 计数器仍计数, 但不影响计数器的状态位。直至计数达到最大值 (32767) 。当 R=1 时,计数器复位,即当前值清 零,状态位 C-bit 也清零。加计数器计数范围: 0~32767。 (2) 加/减计数指令(CTUD) 当 R=0 时,计数脉冲有效;当 CU 端(CD 端)有上升沿输入时,计数器当前值加 1(减 1) 。 当计数器当前值大于或等于设定值时, C-bit 置 1, 即其常开触点闭合。当 R=1 时,计数器复位,即 当前值清零, C-bit 也清零。 加减计数器计数范围: –32768~32767。 (3)减计数指令(CTD) 当复位 LD 有效时,LD=1,计数器把设定值 (PV) 装入当前值存储器, 计数器状态位复位 (置 0) 。当 LD=0,即计数脉冲有效时,开始计数, CD 端每来一个输入脉冲上升沿,减计数的当前 值从设定值开始递减计数,当前值等于 0 时,计 数器状态位置位(置 1) ,停止计数。 【例 4-4】加减计数器指令应用示例,程序 及运行时序如图 4-53 所 示。
4/8
教 学 目 标
知识目标:1、进一步熟悉前面学习的基本指令的用法 2、巩固西门子 plc 编程规则。 能力目标:1、能找出基本输入输出量并分配 i/o 地址 2、会绘制外部接线图,并正确进行接线 3、会使用梯形图进行编程,观察语句表。 4、能下载并调试程序 情感目标:通过通过小组合作学习,共同分析解决问题,提高学生的 学习兴趣。 1、基本指令的应用 2、基本输入输出量并分配 i/o 地址、接线图绘制 3、程序的编制和下载调试 1、绘制接线图,根据外部接线图正确接线 2、程序的调试
表 4.5 计数器的指令格式 STL CTU Cxxx, PV LAD 指令使用说明 (1)梯形图指令符号中: CU 为加计数脉冲输入端; CD 为减计数脉冲输入端; R 为加计数复位端;LD 为 减计数复位端;PV 为预置 值 CTD Cxxx, PV (2)Cxxx 为计数器的编 号,范围为:C0~C255 (3)PV 预置值最大范围: 32767; PV 的数据类型: INT; PV 操作数为:VW, T, C, IW, QW, MW, SMW, AC, AIW, K (4)CTU/CTUD/CD 指令 CTUD Cxxx, PV 使用要点:STL 形式中 CU,CD,R,LD 的顺序不
教 学 重 点
教 学 难 点
教 学 方 法
讲授、练习、任务驱动等
教 学 资 源
亚龙实训设备、计算机等
课 外 作 业
教 学 后 记
1/8
教学实践
教学环节与主要教学内容 新课导入 如果要知道生产线上已经生产了多少产品,仓库 里面进了多好配件,已经用去多少,怎么实现自 动技术呢? 新课讲授 一、 计数器指令介绍 计数器利用输入脉冲上升沿累计脉冲个数。 结构主要由一个 16 位的预置值寄存器、一个 16 位的当前值寄存器和一位状态位组成。当前值寄 存器用以累计脉冲个数,计数器当前值大于或等 于预置值时,状态位置 1。 S7-200 系列 PLC 有三类计数器:CTU-加计 数器,CTUD-加/减计数器,CTD-减计数。 1. 计数器指令格式如表 4.5 所示 具体教学目标 教学活动
课 堂 教 学 教 案
授课章节名称 授 课 日 期
计数器指令
课型 第 14 周 课时数
新授课 2
12 年 12 月 7 日
教 学 目 标
知识目标:1、掌握计数器指令的定时原理 2、知道计数器指令的分类、语句形式 能力目标:1、能正确的使用计数器进行定时程序编辑 2、能区分不同计数器的应用场合。 情感目标:通过通过小组合作指令的用法 计数器指令指令的用法
教 学 重 点
教 学 难 点
教 学 方 法
讲授、练习、任务驱动等
教 学 资 源
亚龙实训设备、计算机等
课 外 作 业
教 学 后 记
教学实践
教学环节与主要教学内容 具体教学目标 教学活动
5/8
新课导入 1、检查学生出勤。 2、检查学生分组情况。
上次课我们完成了简单的线路设计及安装、调试工 作,多数同学能按时按要求完成,今天我们要在此基 础上继续完成新的任务。 实训教授 一、任务要求: 1、 交通灯程序设计 按下启动按钮,东西向绿灯亮 4s,然后闪 2s,接着 东西向黄灯亮 2s 后变为红灯亮 6s;南北方向与之相 反,东西绿灯亮时起红灯亮,黄灯亮时其黄灯也亮, 红灯亮时其绿灯也先亮 4s,闪 2s,然后交替循环。 2、完成任务 (1)电路设计:根据给定的控制要求,列出 PLC 控 制 I/O 分配地址(输入/输出) ,绘制接线图;设计梯形 图或指令表。 (2)安装与接线: 根据接线图在模拟实训考核装置上正确进行输入 /输 出元件的连接。 (3)程序设计、下载及调试:熟练操作 PLC 键盘, 能正确地将所编程序下载到 PLC;按照被控设备的动 作要求进行模拟调试,达到设计要求。 二、操作步骤 1.I/O 分配 通过分析控制要求, 可将输入/输出端子分配填入 下表: 输入(I)