雷尼绍圆光栅安装
rgh41安装
颜色 褐
褐(连接) 白
白(连接) 绿 黄 蓝 红 紫 灰 粉 黑 橙
透明 绿/黄
15针D型 (D) 7 8 2 9 14 6 13 5 12 4 10 11 3 1 15 壳
** 选项05/06(双限位)使用黑色导线作为限位开关功能P输出。 选项03/04(单限位)使用黑色导线作为报警功能E+输出。
读数头传感器经过磁励体时,将输出限位开关信号。完整输出规格,请参阅《RGH41 规格手册》(文档编号L-9517-9496)。 参考零位安装
为确保单向重复性,需要在设置基准的方向上,将参考零位与光栅尺定相。 在两个方向上均有参考零位脉冲输出,但仅能在定相方向上确保重复性。 读数头须正确安装,以确保在整个行程过程中,LED指示灯一直为绿色。应按照安装图 所示,安装参考零位磁励体。 注:建议将设置基准程序作为开机顺序的一部分来执行,以确保记录正确的基准位置。 注:参考零位输出与增量通道同步,信号宽度为分辨率脉冲宽度。 详细信息,请参阅“RGH41规格手册”(文档编号L-9517-9496)。
安装指南 M-9537-9012-03-D
RGH41系列读数头
仅与RGS40-S光栅尺配用合使用
符合EMC(电磁兼容性)标准
RG4光栅系统符合下述的相关欧洲统一电磁兼容性标准。
BS EN 61326-1: 2006 专利 雷尼绍的光栅系统及类似产品的功能特点已获得以下专利或已申请专利:
US 4959542 EP 0274491 US 4,974,962 EP 0274492 US 4926566
滚摆 0° ± 1°
俯仰 0° ±1°
扭摆 0° ±1°
橙色隔板 或 蓝色隔板 间隙 0.8 ±0.15 mm
雷尼绍--精密位置反馈系统引领新革命
国内统一刊号CN31-1424/TB 2014/2 总第240期雷尼绍—精密位置反馈系统引领新革命雷尼绍(上海)贸易有限公司作为亚洲最大的激光、光学、光电行业盛会,2014年慕尼黑上海光博会于3月18至20日在上海新国际博览中心举办。
雷尼绍公司以“不断鼓励创新,提供前沿技术”为主题,携旗下众多精密位置反馈系统产品亮相,包括直线光栅、圆光栅以及磁编码器等,并为广大客户提供更先进可靠的位置反馈产品和解决方案。
RGH24直线光栅系统开放式、非接触RGH24读数头配有雷尼绍独特灵活的20 μm RGS20-S 钢带栅尺,具有1 μm、0.1 μm、10 nm 等多种分辨力。
RGH24结构轻巧,非常适宜在LED 封装设备、倒装贴片机、激光划线机等其空间有限的场合应用。
RGH24超小型读数头带有内置细分电路,能够提供具备工业标准的模拟和数字输出。
RGH45光栅系统雷尼绍RGH45读数头拥有已得到市场认可的RG4直线光栅系统的所有优点——提供非接触式的高速性能,并且拥有光学滤波系统,为防尘、防污染和防划痕提供了可靠的性能保证。
RGH45读数头专门与雷尼绍的高精度RTLR40不锈钢带栅尺配用。
读数头密封在坚固的压铸件外壳中,采用优质的固态元件,具有超凡的可靠性。
双限位开关感应功能和重复性参考零位也属于标准配置,可提供轴两端各自的限位信号。
TONiC TM 紧凑型接触式光栅雷尼绍TONiC 系列产品是用于高动态精密运动系统的新一代超紧凑型光栅,为各种要求严格的工业领域提供了更高的精度、速度和可靠性。
该读数头采用第三代光学滤波系统,噪声(抖动)更低,具有极佳的可靠性和抗污染能力。
TONiC 读数头还有一个可分离的模拟或数字接口,该接口为坚固耐用、使用方便的接头,可放置在距读数头不超过10 m 远的地方。
接口提供的数字信号经细分后分辨力可达1 nm,定时输出数字信号保证了所有分辨力下各种工业标准控制器的最佳速度性能。
雷尼绍 RKL圆弧栅尺安装说明说明书

#雷尼绍/opticalencoders安装说明M-6547-9174-03-B本页空白。
2RKL圆弧栅尺安装说明3目录简介 ............................................................................................................................4法律声明.........................................................................................................................6存储与使用.......................................................................................................................8RKL 圆弧栅尺安装图...............................................................................................................10VIONiC 读数头安装图..............................................................................................................11TONiC 读数头安装图...............................................................................................................12QUANTiC 读数头安装图 ............................................................................................................13ATOM 读数头安装图...............................................................................................................14ATOM DX 读数头安装图............................................................................................................15RESOLUTE 读数头安装图...........................................................................................................16RKL 圆弧栅尺的规格...............................................................................................................17计算所需的栅尺长度...............................................................................................................18RKL 圆弧栅尺:安装方法 ...........................................................................................................19方法1:不带端压片. (20)栅尺准备工作..............................................................................................................21基体准备工作..............................................................................................................21安装栅尺(RKL 栅尺长度 ≥ 80 mm ) ...........................................................................................21安装栅尺(RKL 栅尺长度 < 80 mm ) ...........................................................................................23固定栅尺端部.. (24)方法2:带端压片 (25)基体准备工作..............................................................................................................26安装栅尺(RKL 栅尺长度 ≥ 80 mm ) ...........................................................................................26安装栅尺(RKL 栅尺长度 < 80 mm ) ...........................................................................................28安装端压片 (29)ATOM/ATOM DX 读数头支架的尺寸...................................................................................................30简介RKL栅尺因其柔韧特性而适合卷绕在圆柱体、轴或圆弧的外径上。
圆光栅编码器安装与对准
圆光栅编码器安装与对准刘帅【摘要】Eccentric error is the biggest of the circular grating encoder system can control the error source, through the analysis of the eccentric error research, understand the impact of segregation errors on circular grating measurement precision, find operational scheme for increasing accuracy of circular grating. First, adjusting the center of rotation of circular grating to reduce the mechanical eccentric, and improve the rotary accuracy. Second, using double reading head system can effectively reduce the impact the accuracy of the eccentric error, for about 110 mm in diameter of grating encoder, the level of error can be controlled below 60%.%偏心误差是圆光栅编码器系统中最大的可操控误差源,通过对偏心误差的分析研究,了解偏析误差对圆光栅测量精度的影响,找到提高圆光栅精度的可操作方案.第一,调整圆光栅的旋转中心,减小机械偏心,提高旋转精度;第二,使用双读头系统,可以有效减小偏心误差带来的精度影响,对于110 mm直径左右的光栅码盘,误差可以控制到60%以下的水平.【期刊名称】《电子工业专用设备》【年(卷),期】2018(000)004【总页数】3页(P46-48)【关键词】圆光栅编码器;圆光栅精度;偏心误差;双读头系统【作者】刘帅【作者单位】北京慧摩森电子系统技术有限公司, 北京 100083【正文语种】中文【中图分类】TH7411 圆光栅编码器误差分析圆光栅编码器具有高分辨率、高精度、结构简单和响应速度快等特点,使其在高精度分度盘、精密转台等精密测量领域得到了广泛的应用。
雷尼绍光栅尺的安装说明

非接触光栅系统安装与使用指南RGS20-S 、RGS40-S 光栅安装(End Clamps)Renishaw (雷尼绍)安装准备1. 剪裁所需光栅,确保光栅的长度能满足行程的要求。
请预留把光栅尺伸延至“起始”标记点。
未到达标记点前,一定要避免光栅尺粘贴到表面上。
确保光栅尺已粘贴到全行程的表面上。
安装过程中,避免扭曲及用力拖拽光栅尺。
图(1)图(2)除去端压块底部两边的胶纸。
胶纸的作用是在胶水未稳固时临时固定端压块。
4. 把端压块粘贴到光栅尺的末端。
备注:必须擦净端压块周边的多余胶水,否则读数头的信号会受影响。
型号端压块(End Clamps)所有型号的光栅上安装,并能多次重复使用。
RGA22GRGA245RGA245RGA22G读数头安装读数头设定图(3)图(3)是一个简单安装支架设计。
螺丝(A) ---- 夹紧读数头,设定Pitch 参数螺丝(B) ---- 设定Yaw 参数和偏移螺丝(C) ---- 可设定Roll 参数安装支架设定固定读数头的托架,必须有平坦表面,能满足读数头安装上的机械公差。
其次必须能调节读数头高度并有足够的稳定性,以预防在读数头工作期间所受到的所有外界影响。
为了减少光栅的安装问题,在未使用光栅安装器(Scale Guide)粘贴光栅前,请先把机械托架的Roll 参数和Yaw 参数调节到读数头的误差范围内,可使用clock gauge 或precision square 完成设定。
对于RGH22、RGH26和RGH41,设定读数头的高度,可透过蓝色和或橙色的校准胶片放置于读数头和光栅尺之间,读数头的LED 安装指示灯显示绿色,表示安装正确。
橙色的校准胶片还可以帮助设定读数头相对于光栅尺的偏移和Yaw 参数 。
对于RGH24和RGH25读数头,设定只可透过蓝色校准胶片放置于读数头和光栅尺之间, 读数头的LED 安装指示灯显示绿色,表示安装正确。
读数头高度设定完成后,以缓慢的速度移动读数头,确保读数头的指示灯在光栅尺的整个行程内都保持绿色。
雷尼绍干涉仪使用方法ML-80

一、本次我们主要研究:如何检测机床的螺距误差。
因此我们主要的任务在于:1.应该使用什么仪器进行测量2.怎么使用测量仪器3.怎么进行数据分析4.怎么将测量所得的数据输入对应的数控系统二、根据第一点的要求,我们选择的仪器为:Renishaw 激光器测量系统,此仪器检测的范围包括:1.线性测量2.角度测量3.平面度测量4.直线度测量5.垂直度测量6.平行度测量线性测量:是激光器最常见的一种测量。
激光器系统会比较轴位置数显上的读数位置与激光器系统测量的实际位置,以测量线性定位精度及重复性。
三、根据第二点的解释,线性测量正符合我们检测螺距误差的要求。
因此,我们此次使用的检测方法——线性测量。
总结以上我们的核心在于:如何操作Renishaw 激光器测量系统结合线性测量的方法进行检测,之后将检测得到的数据进行分析,最后将分析得到的数据存放到数控系统中。
这样做的目的在于——提高机床的精度。
第二章、基础知识2.1 什么是螺距误差?开环和半闭环数控机床的定位精度主要取决于高精度的滚珠丝杠。
但丝杠总有一定螺距误差,因此在加工过程中会造成零件的外形轮廓偏差。
由上面的原因可以得知:螺距误差是指由螺距累积误差引起的常值系统性定位误差。
2.2 为什么要检测螺距误差?根据2.1节,检测螺距误差是为了减少加工过程中造成零件的外形轮廓偏差,即提高机床的精度。
2.3 怎么检测螺距误差?(1)安装高精度位移检测装置。
(2)编制简单的程序,在整个行程中顺序定位于一些位置点上。
所选点的数目及距离则受数控系统的限制。
(3)记录运动到这些点的实际精确位置。
(4)将各点处的误差标出,形成不同指令位置处的误差表。
(5)多次测量,取平均值。
(6)将该表输入数控系统,数控系统将按此表进行补偿。
2.4 什么是增量型误差、绝对型误差?①增量型误差增量型误差是指:以被补偿轴上相邻两个补偿点间的误差差值为依据来进行补偿②绝对型误差绝对型是误差是指:以被补偿轴上各个补偿点的绝对误差值为依据来进行补偿2.5 螺距误差补偿的原理是什么?螺距误差补偿的基本原理就是将数控机床某轴上的指令位置与高精度位置测量系统所测得的实际位置相比较,计算出在数控加工全行程上的误差分布曲线,再将误差以表格的形式输入数控系统中。
圆光栅编码器安装与对准
1 圆光栅编码器误差分析
圆光栅编码器具有高分辨率、高精度、结构简 单和响应速度快等特点,使其在高精度分度盘、精 密转台等精密测量领域得到了广泛的应用。圆光栅 编码器主要有两部分组成:光栅码盘和读数头,读
收稿日期院2018-02-27
46(总第 271 期)A ug援 2018
数头和安装在旋转轴上的光栅码盘相对移动,读数 头将光学信号转为电信号输出,传输到控制系统采 集使用。偏心误差对于测量精度影响非常大,过大 的偏心可能导致编码器在整圈内信号输出不连续。
兹 = tan-1 (着÷R ) = tan-1 [0.003÷(104.3÷2)] = 0.003296°
3 圆光栅光学对准
对于圆光栅,不管是单读头还是双读头,码盘 中心的对准都非常有必要,对于玻璃码盘,栅带一
图 3 偏心误差
般刻画在盘片上,金属光栅钢圈在轴的侧面,这两 种的安装对准稍有不同,钢圈安装可以借用千分 表系统调整安装,对于玻璃码盘我们需要使用光 学仪器做圆心对中,借助工业 CCD 可以很好地进 行安装对准工作,如图 4 所示。
中图分类号院 TH741
文献标识码院 B
文章编号院1004-4507(2018)04-0046-03
Installation and Alignment of Circular Grating Encoder
LIU Shuai (Beijing Smartmotion System Technology Inc.,Beijing 100083,China)
Abstract: Eccentric error is the biggest of the circular grating encoder system can control the error source,through the analysis of the eccentric error research,understand the impact of segregation errors on circular grating measurement precision,find operational scheme for increasing accuracy of circular grating. First,adjusting the center of rotation of circular grating to reduce the mechanical eccentric,and improve the rotary accuracy. Second,using double reading head system can effectively reduce the impact the accuracy of the eccentric error,for about 110 mm in diameter of grating encoder,the level of error can be controlled below 60%. Key words: Circular grating encoder;Circular grating precision;Eccentric error;Double reading head system
大型精密转台的结构设计与精度分析
大型精密转台的结构设计与精度分析于广东; 曾维俊; 陈昊; 陈琦; 何昕【期刊名称】《《制造业自动化》》【年(卷),期】2019(041)011【总页数】5页(P104-107,142)【关键词】精密转台; 结构设计; 密珠轴系; 精度分析【作者】于广东; 曾维俊; 陈昊; 陈琦; 何昕【作者单位】中国科学院长春光学精密机械与物理研究所长春 130033; 中国科学院大学北京 100049; 中国科学院苏州生物医学工程技术研究所苏州 215163【正文语种】中文【中图分类】TH1220 引言自非相干光光栅剪切相位衬度成像法的诞生以来,近些年得到了极大的发展,这使得该技术推广至人体检测成为可能。
为验证相位衬度成像原理,要求研制一台精密转台,主要的技术指标如表1所示。
表1 转台主要技术指标本文针对上述指标要求,设计了一台大型精密单轴转台,详细论述了转台结构设计,并对该转台进行了精度分析。
在样机完成后对样机进行了相关检测,结果满足项目需求。
1 转台结构设计转台主要由转台台面、滑环组件、轴承环组件、垂直轴组件、驱动系统、圆光栅组件、基座和调平地脚组成,其基本结构方案及主要尺寸如图1所示。
图1 转台结构方案根据成像系统的物理指标,设计转台台面直径1700mm,中心孔径350mm。
整个台面由Q235A板料及标准方钢管焊接而成,如图2所示,台面由内环、中环和外环组成,内部由8组辐射状的筋将三者连接,筋、中环和外环均是典型的“双夹层”的结构,具有结构简单,刚度高及强度大的特点,转台台面焊接完成后,自身又形成“双夹层”结构,使得整个台面刚度大、强度高。
为减少焊后变形,将转台设计成严格的轴对称结构,同时进在整个焊接过程中,充分运用对称焊、间歇焊等焊接工艺,进一步保证焊后变形尽量小。
焊接完成后,进行退火处理和振动时效处理,使焊接应力充分释放,保证转台台面具有较高的尺寸稳定性。
焊接完成后需对转台台面进行焊后加工,为保证轴承环的安装精度,在转台台面下表面加工有轴承环上止推环安装面,经过粗加工、精加工和磨削后,平面度达8μm~10μm。
微型滑块轴承润滑油膜厚度光学测量系统

微型滑块轴承润滑油膜厚度光学测量系统李超;白清华;田鹏晖;郭峰【摘要】针对微型滑块轴承润滑试验研究测量复杂、精度低、不能实时测量等问题,提出一种微型滑块轴承润滑油膜厚度光学测量系统.通过基于平行并联机构的调节装置实现试样与玻璃盘倾角的调节与固定,上位机控制电机带动玻璃盘转动形成动压油膜.通过光栅获取玻璃盘的实时转速,通过双色光干涉法利用光流算法和基于动态时间规整(DTW)算法实现最小膜厚的同步测量.在实验环境中,该系统运行平稳,对于宽度为0.8 mm的滑块,倾角调节分辨率为1/7328,利用波长655 nm和532 nm的红绿双色光合成激光作为光源,实现膜厚在线追踪,可满足稳态以及时变的试验要求.%To overcome some difficulties in lubricating film measurement of a micro-slider bearing by optical interferometry, such as complicated operation, low accuracy and off-line measurement, a new micro slider bearing film thickness measurement system as well as its structure and measurement principle are introduced. Through the parallel-mechanism-based adjustment device, the inclination angle between the slider and the glass disk can be readily adjusted and set. The glass disk is driven by a motor which accepts the PC's order, and then hydrodynamic lubricant films are generated. The real-time velocity of the glass disk is obtained by a grating sensor, and film thickness is measured on-line by optical flow algorithm and dynamic time warping (DTW) based on dichromatic interfermetry. The lab measurement showed that the system could run very stable, and the resolution of inclination angle for the slider of which width is 0.8 mm is 1/7328. With red and green lasers (wavelength 655 nmand 532 nm) as the light source, the online tracking of film thickness is realized, which can meet the requirements for the measurement under both steady-state and time varying conditions.【期刊名称】《中国测试》【年(卷),期】2018(044)001【总页数】4页(P85-88)【关键词】滑块轴承;油膜厚度;双色光干涉;时变【作者】李超;白清华;田鹏晖;郭峰【作者单位】青岛理工大学机械工程学院,山东青岛 266520;青岛理工大学机械工程学院,山东青岛 266520;青岛理工大学机械工程学院,山东青岛 266520;青岛理工大学机械工程学院,山东青岛 266520【正文语种】中文0 引言润滑的目的是在摩擦表面间形成具有法向承载能力而切向剪切强度低的润滑膜,以减少摩擦阻力和降低材料磨损[1]。
雷尼绍圆光栅resa_l-9517-9399-01-D(en)

雷尼绍圆光栅resa_l-9517-9399-01-D(en)L-9517-9399-01-DRESA is a one-piece stain l ess steel ring with a single track, true absolute scale marked di r ect l y onto the periphery.Read by Renishaw’s revolutionary new absolute ? ne pitch encoder sys t em,, it has high tol e r a nce to dirt,scratch e s and greasy ? n g erprints that can cause other en c od e r sys t ems to mis c ount.The RESA offers impressive accuracy with resolution to 0.00030 arc second, suiting the most demanding precision applications. The low pro? le RESA, with large internal di a m e t er, is easy to design into most in s tal l a t ions. Equally important, its low mass, low inertia design does not compromise system per f or m ance. RESA is available in a wide range of sizes and line counts, providing compatibility with industry standard controllers.System featuresCompatible with the revolutionary newtrue absolute encoder, ? Angular resolution to 0.00030 arc second ? System repeatability to 0.0075 arc second ? 36 000 rev/min maximum speed for all resolutions ? Patented taper mount sim p li ? es integration and minimises installation errors ? Large internal diameter for ease of integration ? Available in sizes from ?52 mm to ?550 mmCustom sizes also available Low mass and low inertia Ultra-low inertia versions also availableIntegral set-up LED on readhead for quick set-up and instant ‘health check’ at any time30 µm scale pitch ensures exceptional motion control performanceResolutions to 27 bit with FANUC or 32 bit with BiSSRESA absolute angle encoder± 0.2°NOTE: θ is the angle between one tapped hole and the adjacent clearance hole. For example, the angle between two clearance holes is 2θ.Sec t ion A-ADimensions and tolerances in mmDH 3.5Mounting holesθ30°30°30°30°20°15°15°15°11.25°11.25°10°*18°9°DH (mm)406590105140196219245290340390462520N666691212121616182020DO(mm)52.2052.1075.4075.30104.40104.20114.70114.50150.40150.20208.80208.40229.40229.00254.80254.40300.40300.20350.40350.20417.40417.00 489.12488.72550.20549.80Nominal external diameter (mm)DI(mm)30.0430.0055.0455.0080.0480.0095.0495.00130.04130.00186.05186.00209.05209.00235.06235.00280.06280.00330.06330.00380.10380.00 451.10450.90510.10510.005275104115150209229255300350417489550*NOTE: There are no tapped holes on the 489 mm ringNOTE: When using an RESOLUTE ETR the hub should be made of a material with a CTE of between 15 and 19 µm/m/°C. Contact your local Renishaw representative for more information.Dimensions and tolerances in mmNominal external diameter (mm)7510015020075.4075.30100.30100.20150.40150.20200.40200.2055.0455.0080.0480.00130.04130.00180.04180.00DO (mm)DH (mm)DI (mm)Nθ61861361866691230°30°20°15°NOTE: θ is the angle between one tapped hole and the adjacent clearance hole. For example, the angle between two clearance holes is 2θ. Sec tion A-AFor further information on installation and mounting options, please refer to the RESOLUTE RESA Installation guide(M-9553-9140) which is available from your local representative, or can be downloaded from:/doc/16ee2628d15abe23492f4d5a.htmlMounting methodsRing rotation to give increasing countNOTE: When using an RESOLUTE ETR the hub should be made of a material with a CTE of between 15 and 19 µm/m/°C. Contact your local Renishaw representative for more information.installation drawing (on RESA ring)Dimensions and tolerances in mmd e d r e d >R 20 D y n >R 10 S t a t i ? 4.7 ±0.2e(O f f s e t N O T E : R o l l t o l e r a n c e a p p l i e s o v e r m o u n t i n g f a c e s d i m e n s i o n *S c a l e c e n t r e l i n ‘F o r w a r d ’ i r r e s F o r m o r e i n f o r m a t i o n o n i n s t a l l a t i o n a n d m o u n t i n g o p t i o n s p l e a s e r e f e r t o t h e R E S O L U T E R E S A I n s t a l l a t i o n g u i d e (M -9553-9140). T h i s c a n b e d o w n l o a d e d f r o m o u r w e b s i t e w w w .r e n i s h a w .c o m /e n c o d e r o r c o n t a c t y o u r l o c a l r e p r e s e n t a t i v e .R e c o m m e n d e d t h r e a d e n g a g e m e n t 5 m i n (8 m m i n c l u d i n g c o u n t e r b o r e ). R e c o m m e n d e d t i g h t e n i n g t o r q u e 0.5 t o 1.0 N m .Operating speci? cationsMaterial303/304 stainless steel Coef? cient of expansion 17 µm/m/°C (ppm/°C)Temperature Storage standard RESOLUTE: +80 °C to -20 °C ETR: +80 °C to -40 °COperating standard RESOLUTE: +80 °C to 0 °CETR: +80 °C to -40 °C Nominal external diameter (mm)Nominal internal diameter (mm)Mass (kg)Moment of inertia (kgmm 2)52300.1–47–75550.150.0716********–0.1–200104800.25–550–115950.25–640–200180–0.2–1 8001501300.30.151 600720‘A’ section ‘B’ section ‘A’section ‘B’ section2091860.5–4 900–Nominal external diameter (mm)Nominal internal diameter (mm)Mass (kg)Moment of inertia (kgmm 2)‘A’ section ‘B’ section ‘A’ section ‘B’ section2292090.5–5 900–2552350.55–8 000–3002800.65–14 000–3503300.75–22 000–4173801.76–70 000–4894512.12–120 000–5505102.67–188 000–System accuracy is graduation accuracy plus SDE. Effects such as eccentricity in? uence installed accuracy;for application advice, please contact your local representative.Caution: Very high speed motion axes require additional design consideration. For applications that will exceed 50% of the rated maximum reading speed of the ring, please contact Renishaw for further advice .Speed and accuracyResolutionRESOLUTE is available with a variety of resolutions, to meet the needs of a wide range of applications.The choice of resolutions depends on the serial protocol being used, but there are no limitations due to ring size, eg, FANUC 27 bit resolution is available on all ring sizes.BiSS RESOLUTE resolution options:18 bit (262 144 counts per revolution, ≈ 4.94 arc second)26 bit (67 108 864 counts per revolution, ≈ 0.019 arc second)32 bit (4 294 967 296 counts per revolution, ≈ 0.00030 arc second)Note that 32 bit resolution is below the noise ? oor of the RESOLUTE encoder. FANUC RESOLUTE resolution options:23 bit (8 388 608 counts per revolution, ≈ 0.15 arc second)27 bit (134 217 728 counts per revolution, ≈ 0.0097 arc second)For resolution options on other protocols, please contact Renishaw.Nominal externaldiameter (mm)Maximum reading speed (rev/min)System accuracy (arc second)527510010411515020020922925530035041748955036 00025 00019 00018 00016 50012 0009 5009 0008 3007 4006 3005 4004 5003 9003 400±5.49±3.82±2.86±2.69±2.44±1.91±1.43±1.4±1.27±1.11±0.95±0.82±0.68±0.59±0.52Scale codeB - Standard Diameter052 - 52 mm 075 - 75 mm100 - 100 mm (‘B’ section only)104 - 104 mm 115 - 115 mm 150 - 150 mm200 - 200 mm (‘B’ section only)209 - 209 mm 229 - 229 mm 255 - 255 mm 300 - 300 mm 350 - 350 mm 417 - 417 mm 489 - 489 mm 550 - 550 mm FormA - tapered internal diameterB - low inertia (only available in 75, 100, 150 and 200 mm diameters)MaterialS - stainless steelPitch30U - 30 µmAbsolute angle encoder seriesRenishaw plcNew Mills, Wotton-under-Edge,Gloucestershire GL12 8JR United KingdomT +44 (0)1453 524524F +44 (0)1453 524901E uk@/doc/16ee2628d15abe23492f4d5a.html/doc/16ee2628d15abe23492f4d5a.html*L-9517-9399-01*For worldwide contact details, please visit ourmain website at /doc/16ee2628d15abe23492f4d5a.html /contactRENISHAW HAS MADE CONSIDERABLE EFFORTS TO ENSURE THE CONTENT OF THIS DOCUMENT IS CORRECT A T THE DA TE OF PUBLICA TION BUT MAKES NO WARRANTIES OR REPRESENT ATIONS REGARDING THE CONTENT . RENISHAW EXCLUDES LIABILITY , HOWSOEVER ARISING, FOR ANY INACCURACIES IN THIS DOCUMENT .RENISHAW ? and the probe emblem used in the RENISHAW logo are registered trademarks of Renishaw plc in the UK and other countries. apply innovation is a trademark of Renishaw plc.? 2009-2011 Renishaw plc All rights reserved Issued 1211Angle encoder part numbersRESA 30U S A 300 BRESA compatible readheadsRESAInstallation guide M-9553-9140 Data sheet FANUC L-9517-9442 BiSS L-9517-9448 Mitsubishi L-9517-9454ETRL-9517-9420。
一种高精度六轴运动平台设计

一种高精度六轴运动平台设计潘绍飞;肖世德【摘要】A high precision six-axis motion platform has been studied on the design of overall structure and control scheme. Details of hardware components, control system, control strategy and software design of the motion platform have been de-scribed. The six-axis motion platform could meet the requirements of high precision movement control.%以一种高精度六轴运动平台为对象,对其进行了总体方案和结构设计,对其运动控制方案进行了研究,比较详细地介绍了该运动平台的硬件组成、控制方案、控制策略和软件设计,使得该六轴运动平台能够满足高精度运动控制要求。
【期刊名称】《机械研究与应用》【年(卷),期】2015(000)003【总页数】3页(P121-123)【关键词】六轴运动平台;运动控制;控制系统;控制策略【作者】潘绍飞;肖世德【作者单位】西南交通大学机械工程学院,四川成都 610000;西南交通大学机械工程学院,四川成都 610000【正文语种】中文【中图分类】TH1220 引言多轴运动平台可以按照需求在给定运动范围内,实现多自由度运动,达到预计位姿,在工业生产和生活领域中应用比较广泛,尤其在汽车、飞机、船舶和娱乐设施等运动模拟方面,多轴运动平台已经成为必不可少的动态仿真设备。
运动平台结构及运动形式的种类繁多,根据不同标准可对运动平台进行不同的分类。
按运动平台具有的自由度个数,可分为单自由度、二自由度、三自由度、四自由度、五自由度、六白由度运动平台;按运动平台的结构形式,可分为串联式和并联式两种[1]。
OLP40光学车床测头安装指南说明书

安装指南H-5625-8512-05-B© 2009-2019 Renishaw plc。
版权所有。
本文档未经Renishaw plc事先书面许可,不得以任何形式,进行部分或全部复制或转换为任何其他媒体形式或语言。
出版本文档所含材料并不意味着Renishaw plc 放弃对其所拥有的专利权。
雷尼绍文档编号:H-5625-8512-05-B首次发布:2009.02修订:2019.12安全须知 ......................................................................1.1安全须知..................................................................1.1 OLP40基本介绍...............................................................2.1简介 ......................................................................2.1入门...................................................................2.1系统接口 ................................................................2.1 Trigger Logic™ ...........................................................2.2测头模式..................................................................2.2可配置的设定 ...............................................................2.2关闭方式 ................................................................2.2增强型触发滤波器........................................................2.4光学传输模式............................................................2.4光学功率 ................................................................2.4 OLP40尺寸................................................................2.5 OLP40规格................................................................2.6典型电池寿命............................................................2.7系统安装 ......................................................................3.1将OLP40与OMM-2 / OSI或OSI-D或者与OMI-2 / OMI-2T / OMI-2H配合安装........................................3.1工作区域 ................................................................3.1 OMM-2 / OSI或OSI-D或者OMI-2 / OMI-2T / OMI-2H定位 ..........................3.2 OLP40使用前的准备工作.....................................................3.3安装测针 ................................................................3.3测针弱保护杆............................................................3.4安装电池 ................................................................3.5将测头安装到刀柄上 .......................................................3.6测针居中调整............................................................3.7测针触发力及调节...........................................................3.8OLP40安装指南ii标定OLP40 ................................................................3.9为什么要标定测头? .......................................................3.9用镗孔或车削直径进行标定.................................................3.9用环规或标准球进行标定...................................................3.9标定测头长度............................................................3.9 Trigger Logic™ ...............................................................4.1检查测头设置 ...............................................................4.1测头设置记录 ...............................................................4.2更改测头设置 ...............................................................4.4复位功能..................................................................4.6工作模式..................................................................4.8维护..........................................................................5.1维护 ......................................................................5.1清洁测头..................................................................5.1更换电池..................................................................5.2 OLP40金属眼睑式密封圈.....................................................5.4查错..........................................................................6.1零件清单 ......................................................................7.1一般信息 ......................................................................8.1免责声明..................................................................8.1商标 ......................................................................8.1保修 ......................................................................8.1中国RoHS(电子信息产品污染控制管理办法)....................................8.1设备更改..................................................................8.1数控机床..................................................................8.1测头保养..................................................................8.1专利 ......................................................................8.2 Microchip软件许可协议 .......................................................8.2 EU标准符合声明............................................................8.3废弃电子电气设备 (WEEE) 指令 ................................................8.3 REACH法规 ................................................................8.3安全须知用户须知OLP40配有两节非充电型½ AA 锂亚硫酰氯电池(详见第5.2页“更换电池”)。
雷尼绍光栅尺

LED“最佳”状态指示灯在内的内置安 指示。
装状态指示灯和 SiGNUM ™软件使系统
安装简便,并能对系统进行实时诊断。
SiGNUM ™ RELM 技术资料
SiGNUM ™ RELM 技术资料
RELM 因钢栅尺
SiGNUM ™ RELM 系统由 SiGNUM ™ SR 读数头、Si 细分盒和 RELM 栅尺组成。
但选择位置反馈光栅非常关键。利用一
在制造商努力提高新一代机器的指
流的精度、重复精度、可靠性和速度, 标时,许多人寻求位置反馈系统来提供
您可以依靠 RELM 为您的机器提供优势。 更强大的性能。焊线机要求低 CTE、重
复 精 度 和 速 度 — 这 只 是 SiGNUM ™
RELM 众多优异性能中的三个。
光栅、坚固耐用的磁旋转编码器以及一 速地制造并发货。
系列激光尺产品。
Renishaw 光 栅 测 量 系 统 应 用 于 工
Renishaw 的光栅系统基于创新的非 业自动化的所有领域,如半导体、电子、
接触式光学结构。这种设计在实现零机 医 疗、 扫 描、 印 刷、 科 研、 空 间 测 量、
械滞后和精确测量的同时,还具有极强 影像和专用机床等,其中包括精密测量
师提供了高性能和使用便利的完美平衡, 自动光学检测系统 (AOI) 在此过程中扮
其许多应用以前只能靠易损的小栅距光 演着重要角色,要求高性能的直线光栅
栅来实现。
提供精确的位置反馈。具有低膨胀系数
7
晶片处理和切割
的高精度光栅尺对许多高性能的光学检 测机器来说都非常重要。
随着晶片尺寸的增加,晶片处理机
ATOM_Data_Sheet_雷尼绍

技术规格
材料 尺寸 栅距 基准固定 参考零位
精度(20 °C时) 热膨胀系数 长度 (mm)
质量
钠钙玻璃 1.1 mm x 6.35 mm (H x W)(包括不干胶带) 20 µm和40 µm 栅尺的一侧涂抹粘合剂 (A-9531-0342) 自动调相光学参考零位的重复精度在整个指定速度和温度范围内均可达到单位分辨率 在行程中间或一端,由读数头的方向确定 ±3 µm ~8 µm/m/°C
ATOM是使用雷尼绍TONiC系列光栅的独特 光学滤波系统的微型化版本。
这一光学系统设计可以产生特定的空间频 率,因此可以过滤其他谐波信号,包括由灰尘或 其他污染物导致的谐波信号。
结果便是利萨如 (Lissajous) 圆具有极高的纯度,即 使栅尺暴露在污染物之中,也可以维持其保真度:适合用 于可靠性至关重要的场合。
有关详细信息,请联系当地的雷尼绍业务代表。
5
规格手册 ATOM光栅系统
RCLC玻璃栅尺安装图
端部参考零位 读数头方向
读数头基准面
1.42 ±0.25 5
40 µm型 (扭摆公差±1°)
0.39
20 µm型 (扭摆公差±0.5°)
0.18
LED安装指示灯
中间参考零位 读数头方向
L/2
栅尺 基准边缘
参考零位 粘贴式基准夹具 (长度8 - 16,宽度1 - 5)
技术规格
材料 尺寸 栅距 基准固定 参考零位
精度(20 °C时)
热膨胀系数 长度
质量
经过硬化和淬火处理的马氏体不锈钢,背面自带不干胶
0.41 mm x 8 mm (H x W)(包括不干胶带)
安装指南:ATOM圆光栅系统_decrypted

校准系统
参见第16页。
ATOM圆光栅安装指南
3
RCDM玻璃码盘安装图
LED安装指示灯 'A' ± 'E'
调整带的中心 10.25 ± 'F'
参考零位
玻璃码盘
尺寸和公差 (mm)
码盘正向 (增加计数)
调整带用于在码盘 支架/轴上调整码盘
D1 D2 D3
(俯仰公差±1°) 0.36
间隙(用于校准): 2.5 ±0.08 (40 µm型) 2.5 ±0.04 (20 µm型) 操作间隙: 2.5 ±0.11 (40 µm型) 2.5 ±0.055 (20 µm型)
FPC型图示
23
仅限读数头(无接口)
8
输入和输出信号
23
插入FPC排线
9
线缆型图示
24
移除FPC排线
9
输入和输出信号
24
ACi接口
10
速度
25
Ri接口
11
Ri接口:
Ti接口
12
接口图
26
读数头安装和调整:
输出信号
26
读数头调整方式
13
速度
27
垫片组件
13
Ti接口:
仿真头
14
接口图
28
信号幅值调节
14
符合RoHS标准
符合欧盟指令2011/65/EU (RoHS)。
专利
雷尼绍的光栅系统及类似产品的功能特点已获得以下专利或已进行专利申请:
CN101300463B CN101310165B
EP1946048 EP1957943
JP5017275 US7839296
雷尼绍SRSM圆光栅

L-9517-9155-01-ARenishaw’s SR readhead and Si interface are part of the new range of encoders.They have been designed for use with Renishaw’s range of RESM angle encoders which incorporate the IN-TRAC TMbi-directional reference mark.Like all Renishaw encoders, therange offers high speed, reliable operation and open, non-contact performance with excellent immunity to dirt and electrical noise.The interface incorporates dynamic signal control which, combined with the patentedfi ltering optics ensure excellent signal integrity and low cyclic error.The Si interface can be mounted remotely and a small connector on the readhead cable allows it to be fed easily through machines where access is restricted.Readhead (s R)s R005A – 0.5 m cables R010A – 1.0 m cables R015A – 1.5 m cables R030A – 3.0 m cables R050A – 5.0 m cables R100A – 10.0 m cableInterface unit (s i)s i-0004 – 5 µms i-0020 – 1 µms i-0040 – 0.5 µms i-0100 – 0.2 µms i-0200 – 0.1 µms i-0400 – 50 nms i-1000 – 20 nms i-0000 – Analogue•IN-TRAC TM bi-directional reference markand on-scale dual limit outputs•Operating temperature up to 85 °C•Speeds up to 3673 rev/min (10 m/sec)•Dynamic signal control to give cyclicerror of less than ± 40 nm tangentially•Comprehensive software for ease ofinstallation and system diagnostics•Integral LED’s for optimum set up andsystem diagnostics•Industry standard Analogue andDigital outputs with resolutions from40 to 0.02 arc seconds (5 µm to 20 nm)•Non-contact open optical system•Filtering optics providing excellentdirt immunity•Compatible with RESM•High fl ex, UL approved cableSR installation drawingDimensions and tolerances in mmSi installation drawingDimensions and tolerances in mm14.2Note: IN-TRAC TM reference mark is integrated in the scale and does not require any external magnetic actuators or physical adjustment. For applications such as partial arc, dual on-scale limits can be used on ‘A’ section rings having an external diameter of 100 mm or more.Maximum speed (m/s)Speeds quoted in m/s. Angular speed depends on ring diameter - use the following equation to convert to rev/min.Angular speed (rev/min) = V x 1000 x 60π D Where V = maximum linear speed (m/s) and D = external diameter of RESM (mm)Interface s i-0004 s i-0020 s i-0040 s i-0100 s i-0200 s i-0400 s i-1000 s i-00004010101052.51.250.5102010106.52.71.250.60.25101210841.50.80.40.151081052.510.50.250.110Recommended counter clock frequency (MHz)*Resolution5 µm1 µm0.5 µm0.2 µm0.1 µm50 nm20 nmanalogue10106.531.250.60.30.1210610420.80.40.20.081041031.50.60.30.150.0610140.80.40.150.0750.040.0210*Digital onlyD ata sheet FeaturesConnections Si output (all models)26 pin high density ‘D’ type plugElectrical connectionsSi and SR grounding and shieldingInterfaceCustomer electronics Inner shieldOuter shieldOutput signals0 V5 VNOTE: Inner shield must beconnected to 0V atcustomer electronics onlyNOTE: The external earthing tag on theinterface should be used when mounting the interface on a DIN rail ReadheadMaximum cable lengthReadhead to interface: 10 mInterface to controller: Dependent on output frequency. See tablebelow for details.P Q W<25 V*Select R so max. current does notexceed 20mAV0 V1 V2-V0 V1 V2+Recommended signal terminationDigital outputs- all Si interfaces except Si0000Limits and Warning outputs - all Si interfacesAnalogue outputs - all Si interfacesAlternatively, use a relay or opto-isolatorgRenishaw plcNew Mills, Wotton-under-Edge,Gloucestershire GL12 8JR United KingdomT +44 (0)1453 524524F +44 (0)1453 524901E uk@ RENISHAW ® and the probe emblem used in the RENISHAW logo are registered trademarks of Renishaw plc in the UK and other countries. apply innovation is a trademark of Renishaw plc.© 2004 Renishaw plc Issued 1104 Renishaw reserves the right to change specifi cations without noticeFor worldwide contact details, please visit our main website at /contact*L-9517-9155-01*。
TS27R接触式刀具测头的安装使用

TS27R接触式刀具测头的安装使用TS27R接触式刀具测头的安装及使用本文简单讲述了雷尼绍TS27R接触式刀具测头的安装及使用方法。
测头为圆形探针,安装位置为工作台右上角,数控系统为Fanuc 0i-MD。
一、测头的安装及校准1)将测头以上图所示的方式安装到工作台右上角;2)将千分表吸附在主轴上,并定位至测头探针上,使其压入量适中;3)用手轮手动缓慢移动Y轴,观察千分表的跳动,通过调整探头上面的螺钉c、d调平,调整整个移动在5um之内,分别拧紧螺钉c和螺钉d;4)用手轮手动缓慢移动X轴,观察千分表的跳动,应先押紧左前的螺钉a和螺钉b,通过调整螺钉e、f来调平,调整整个移动在5um之内,分别拧紧所有的固定螺钉;二、导入测量软件1)利用程序向导(如上图),设定相应的参数,可以自动生成刀具测头的宏程序,各参数对应的变量为:#101 第一次触碰时的速度#102 偏置类型,C型=3#103 单面测量设定,工作台右上角,从测头负向触碰,=1#104 测头方向,工作台右侧,=1#105 回退距离,用于第二次触碰前的回退,=0.3#106 两个测头选项,单测头,=0#107 数据的设定单位,公制mm,=1#109 刀具补偿类型,半径补偿,=1#110 若刀具直径>=设定值,旋转刀具,=10#111 若刀具直径>设定值,从测头单面测量,=100#113 以快速定位,至测头上方的位置(据测头顶面),=100#114 第二次接近测头(安全移动)的位置(据测头顶面),=10 #117 过行程距离,默认5mm#118 非接触式选项,=0#120 内部数据基本号,=520#121 机床X轴,立加,=1#122 机床Y轴,立加,=2#123 机床Z轴,立加,=3#124 长短刀的搜索速度,=2000#125 当测量半径时,半径方向的偏置,默认5mm#127 快进速度,默认5000mm/min#128 语言,英语,=1#138 最长刀的尺寸,=330#139 最短刀的尺寸,=50#145 区域检测,用于检测测量移动是否有效,=0.005其他公共参数:#116 有效的刀长#101~#145,#147~#149 用于内部计算#146 公差标志输出(0-正常,1-超出,2-无刀)2)将生成的程序输入系统:搜索P3211,输入可写密码,修改P3202#4=0;拷贝程序至内存,完成之后将P3202#4修改回1。
雷尼绍 RGH34 光栅系统 规格手册说明书
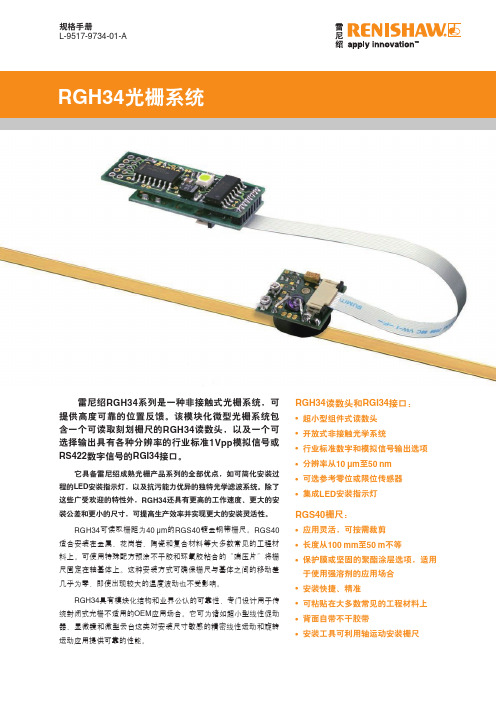
L-9517-9734-01-ARGH34读数头和RGI34接口:• 超小型组件式读数头• 开放式非接触光学系统• 行业标准数字和模拟信号输出选项• 分辨率从10µm 至50nm • 可选参考零位或限位传感器• 集成LED 安装指示灯RGS40栅尺:• 应用灵活,可按需裁剪• 长度从100mm 至50m 不等• 保护膜或坚固的聚酯涂层选项,适用于使用强溶剂的应用场合• 安装快捷、精准• 可粘贴在大多数常见的工程材料上 • 背面自带不干胶带• 安装工具可利用轴运动安装栅尺雷尼绍RGH34系列是一种非接触式光栅系统,可提供高度可靠的位置反馈。
该模块化微型光栅系统包含一个可读取刻划栅尺的RGH34读数头,以及一个可选择输出具有各种分辨率的行业标准1Vpp 模拟信号或RS422数字信号的RGI34接口。
它具备雷尼绍成熟光栅产品系列的全部优点,如可简化安装过程的LED 安装指示灯,以及抗污能力优异的独特光学滤波系统。
除了这些广受欢迎的特性外,RGH34还具有更高的工作速度、更大的安装公差和更小的尺寸,可提高生产效率并实现更大的安装灵活性。
RGH34可读取栅距为40µm 的RGS40镀金钢带栅尺。
RGS40适合安装在金属、花岗岩、陶瓷和复合材料等大多数常见的工程材料上。
可使用特殊配方预涂不干胶和环氧胶粘合的“端压片”将栅尺固定在轴基体上。
这种安装方式可确保栅尺与基体之间的移动差几乎为零,即使出现较大的温度波动也不受影响。
RGH34具有模块化结构和业界公认的可靠性,专门设计用于传统封闭式光栅不适用的OEM 应用场合。
它可为诸如超小型线性促动器、显微镜和微型云台这类对安装尺寸敏感的精密线性运动和旋转运动应用提供可靠的性能。
尺寸和公差(单位 mm )RGH34读数头安装图*从栅尺表面测得的尺寸。
(扭摆公差±1°)该视图未包含支架性能FPC 电缆至RGH34可选长度:50、100和尺寸和公差(单位 mm )RGI34接口图通用规格电源 5 V ±5%120 mA注:电流消耗数字指的是无端接的RGI34接口。
安装偏心对圆光栅测角精度的影响及误差补偿技术研究
在某 转 台校准 技术 研 究课 题 中 , 选 用 的雷 尼绍 圆光
栅尺 S I G N U M 2 0 m n 系列, r=7 5 m m。在安装 调试 过程 中 , 测得 圆光栅 与转轴 中心 的偏心 量 a:0 . 0 0 5 a r m。 由式 ( 2 ) 可知 , 当c o s p=±1 时, 角度 误差值 最大 :
司, 西 班牙 的 F A G O R公 司 , 奥地 利 的 A M O公 司和 1 3 本 的
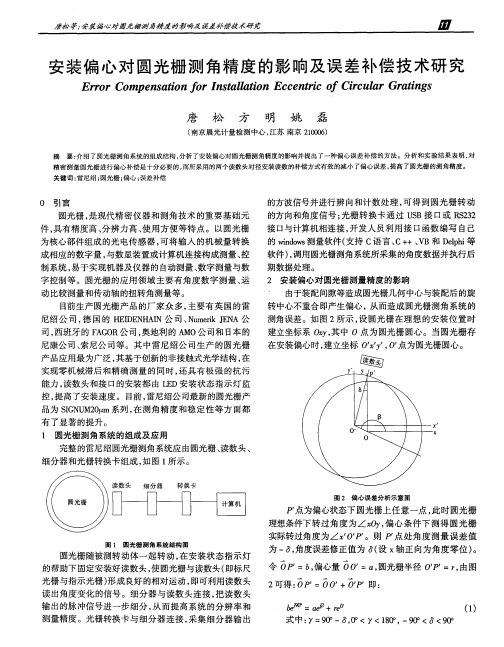
由于装配 间隙等造成 圆光栅 几何 中心 与装配 后 的旋
转中心不重合 即产生偏心, 从而造成圆光栅测角系统的 测角误 差 。如 图 2所示 , 设 圆光 栅 在理 想 的安 装位 置 时 建立坐标系 O x y , 其中 0点为圆光栅圆心。当圆光栅存 在安装偏心时 , 建立坐标 0 Y, 0 点为圆光栅圆心 。
0 引言
的方波信号并进行辨 向和计数处理 , 可得到 圆光栅转动 的方 向和角度信号 ; 光栅转换卡通过 U S B接 口或 R S 2 3 2
接 口与计算 机相 连接 , 开 发 人员 利 用 接 口函数 编 写 自己
圆光栅 , 是现代精密仪器 和测角技术 的重要基础元 件, 具有精度高、 分辨力高、 使用方便等特点。以圆光栅 为核心部件组成的光电传感器 , 可将输入的机械量转换 成相 应 的数字 量 , 与数 显装 置或计 算机 连接构 成测量 、 控
制 系统 , 易于 实现 机器 及仪 器 的 自动测 量 、 数 字测量 与数
的w i n d o w s 测量软件( 支持 c 语言、 c+ +、 V B和 D e l p h i 等 软件 ) , 调用圆光栅测角系统所采集的角度数据并执行后