外科手术导航系统.
导航系统在神经外科血管病中的应用

一
个可 移动 的 摹底 支撑 ,监 测水 野 参考 环及 探针 I毛
动 发射 和 被动 反射 的 高聚焦 红外 线 红外 线 发射 器 j
二 r世 纪 九 年代 中期 , 连 结 现 代 影像 技 术 和 照 相机 集 成在 ・ ,可 向术 野方 向 发射 红外 线 ,可被 起 微 神 经 外 科 手 术 技 术 的 桥 梁—— 神 经 导 航 系 统 聚 光反 射标 记 反喇 至照 相机 照 像 机捕 捉井 艟化红外
之后出现的磁共振 ( ) MR 技术, 使我们能盟精确地观察 2 导航 系统简 介
到脑 及 神经 的解 剖 结构 .神经 外 科 的 诊断技 术 因l达 酊 到 了前所 未有的水 平 随着 诊断技 术 的提 高 ,神经 外科 手术技 术也 扯 导航 系统 全 称 为尤 框架 _体 定 向导 航 系统 .是 多 立 领 域 高技 术的缩 俞 。它 以强 大 的计 算机技 术和 图像 处 Biblioteka 1 导航 系统的发 展概述
了微刨 F术 时代 导航技 术 使整 个神 外 水过 程 处在
现 代计算 机 技术 的出 现推动 了医学 影像 学 的革命 . 影 像学资料 的虚 拟实 时监测 和指 导 F,平均 2 mm 以下 二 l纪 E十年 代 ,传统 的 x光搬 片技 术 与计算 机技 的 高精 度 .保证 手 术医 师充 分发 挥 显微 手术 的精 湛技 f } 术 十结 合出现 了 CT.导 致 了神经外 科 诊断水平 的 毪 口 跃 术 ,以尽 _能小 的损伤完 成病变 的切除 . _ J . 神 经科 医师 可以非 常直 观地 了解患者 颅 发生 的病 变。
WAN( Ro g Beig]a tnHo pl ; n i n ' na s i i ( i n IX 10 Be ig (J5 ) j (
脊柱外科计算机辅助手术导航系统应用现状_张正东
[] 神经并发症。L a a u f e r等 3 报道在 I s o C r m 导航下经鼻 - 内镜齿突切除治疗1例严重颅底凹陷症, 手术过程顺利, [] 术 后 次 日 患 者 即 可 进 食 。R a a s e k a r a n 等4 报 道 对 j A S N S导航下4例患者术中 C C 2 椎板交叉螺钉置入精确 度进行分析, 提示 C A S N S导航有助于螺钉大小的选择及 提高置入精确度, 且术中根据导航图像引导可避免椎动 ] 1 5 1 - 显示, 脉损伤。许多文献报道[ A S N S 导航下置入颈 C 椎齿突螺钉、 后路侧块螺钉、 椎弓根螺钉, 以及施行包括 经皮寰枢关节螺钉在内的微创手术, 均表现出良好的精 导航技术在评估骨性减压 确度和安全性; 均认为 C A S N S 程度、 颈椎三维空间序列、 确定内固定物恰当位置及减少 术后 C 且可灵活接受患者不 T 扫描等方面均有显著作用, 同的术中姿势及体位。 . 2 2 胸椎 胸椎, 尤其是上段胸椎手术中狭小的椎弓根、 肩胛骨 对透视的遮挡及胸椎前方毗邻重要血管和脏器, 均使手 术难度增加, 术中 C A S N S导航则可有效地提高胸椎手术 [ ] 1 等 的安全性。Y o u k i l i s 2 回顾分析 4 年间经 C A S N S导 航置入2 结果显示 1 2 4枚胸椎椎弓根螺钉的情况, 9 枚螺 ) ( ) , 侵 枚 为 级 钉( 犯 骨 皮 质 其 中 . 5 % 1 4 . 9 % 8 1 Ⅱ 侵犯 , 。N ( 为Ⅲ级侵犯( m) . 6 %) m) o t t m e i e r 8枚( 3 2 m 2 m ≤ > ] 1 3 报道对2 椎弓根螺 等[ 3 8枚经 C A S N S导航置入的 T 1 2 ~1 钉进行 C 结果显示有2 T 扫描评估, 2枚螺钉侵犯骨皮质, 其中 级侵犯2 均未发生神经、 血管及 1枚, Ⅱ级侵犯 1 枚, Ⅰ 脏器损伤等并发症; 认为 C A S N S导航下允许更大直径的 螺钉经椎弓根进入椎体, 并更靠近椎弓根内侧位置的轨 [ ] 4 报道对 迹, 以达到更强的结构稳定性。B l e d s o e等 1 4例 3 置入 患者经I 枚 并于 T a s o C r m 导航行颈胸融合, 5 0 1 - 1 ~3 椎弓根螺钉, 术后经薄层轴向 C T 扫描及同一放射科医师 位置理想, 评估显示, 其中1 4 0枚螺钉 ( 3 . 3 %) 0 枚螺钉 9 1 ; ( ) 侵犯骨皮质 Ⅰ 级侵犯 认为 C A S N S 导航下上胸椎椎弓 根螺钉置入是精确而安全可靠的。 . 3 2 腰骶椎 ] [ 5 、 、 、 报道对 1 i a n等 1 6 具分别轴性旋转 0 ° 5 ° 1 0 ° 2 0 ° T , 的腰 椎 仿 真 模 型 进 行 实 验 研 究 并 均 分 为 传 统 组 和 共置入 8 经术后 C A S N S导航组, 0 枚椎弓根螺钉, T扫 C , 描和重建图像评估发现 C A S N S 导航组置钉精确度高于 ] [ 6 报道应用术中 O 传统组。O a e r t e l等 1 r m 导 航对 下胸 -
口腔颌面外科手术导航分类及其定位配准
口腔颌面外科杂志2010年2月第20卷第1期JournalofOralandMaxillofacialSurgeryVol20No1February2010随着现代计算机辅助外科技术在临床上日新月异的发展越来越多的导航设备进入了口腔颌面外科手术领域。
以前曾用于神经科或者骨科的导航设备经过重新设计现在已经用于口腔颌面外科。
相信随着医学科技的发展会有更多的设备进入口腔领域。
按照导航工具与手术医生的交互方式手术导航系统可以分为主动式、半主动式和被动式三类。
1导航系统的分类1.1主动式导航系统这种导航系统目前在口腔领域的应用很少它其实就是手术机器人。
该系统全凭机械手臂按照手术计划进行精确的手术操作但其灵活性较差而且术中需要严格的安全措施来保障医生和患者的安全并且相关硬件和软件的开发在现阶段也不成熟所以这种系统目前还没有用于口腔颌面外科领域的临床报道。
1.2半主动式导航系统该类型可以说是二代手术机器人它将术者和机器人相结合允许在机器人可控的范围内由术者自由移动手术工具以达到机器人精确性和术者灵活性相结合的目的。
但这种系统目前尚处于研发阶段国内外口腔颌面外科临床领域的应用报道也很罕见。
1.3被动式导航系统此类型是目前临床上应用最广的导航系统在手术过程中的作用仅仅是辅助作用即通常所说的由计算机辅助的外科导航系统其关键的手术步骤要靠手术医生来完成。
这类系统的作用主要是在实际手术过程中通过红外线或者激光对手术器械位置的追踪实时显示术区信息用虚拟环境指示实际环境中的手术。
由于可以结合术前或者术中医学影像资料从而可以精确地设计手术方案提高手术的精确性减小手术切口减少病人所承受的痛苦所以它也成为微创外科的一个新的手术方案。
目前导航被应用于口腔各个领域包括口腔颌面部肿瘤、颌面部外伤、正颌矫形、牵张成骨近年来被应用于颞部复杂结构的手术1、眼眶和面中部重建2、颧骨颧弓手术3、骨移植和修整4等。
其实导航手术被称为image-guidedsurgery有些勉强现在科技的发展已经使导航手术突破了传统的医学影像的引导尽管临床上现在仍以图像引导的导航系统为主。
智能手术导航系统:提高手术安全性的新技术

智能手术导航系统:提高手术安全性的新技术在现代医学的舞台上,智能手术导航系统如同一位经验丰富的航海家,为医生们提供了精准的航线指引。
这项新技术的出现,不仅提高了手术的安全性和准确性,还为患者带来了更加安心的治疗体验。
首先,让我们来了解一下智能手术导航系统的工作原理。
它通过高精度的传感器和先进的算法,实时捕捉手术器械的位置和运动轨迹,将数据传输到计算机系统中进行处理。
然后,系统会根据这些数据生成三维图像,帮助医生更好地了解手术区域的解剖结构和周围组织的情况。
这样,医生就能够在手术过程中做出更加精确的判断和决策,避免对正常组织的损伤。
智能手术导航系统的优势不言而喻。
它就像一位细心的守护者,时刻关注着手术过程中的每一个细节。
无论是复杂的神经外科手术还是精细的眼科手术,智能手术导航系统都能够提供强大的支持。
它能够减少手术风险,提高手术成功率,让患者更快地康复。
然而,我们也必须认识到智能手术导航系统并非万能的。
它仍然需要医生的专业知识和经验来进行操作和判断。
因此,在使用智能手术导航系统时,医生们需要保持警惕,不断学习和掌握新技术,以确保手术的安全和有效。
此外,智能手术导航系统的发展也面临着一些挑战。
例如,如何进一步提高系统的准确性和稳定性?如何降低系统的成本,使其更加普及和可及?这些问题都需要我们进行深入的思考和探索。
在未来的发展中,我们可以期待智能手术导航系统与人工智能、机器学习等技术的结合,进一步提升其智能化水平。
同时,我们也需要加强跨学科的合作和交流,共同推动智能手术导航系统的研究和应用。
总之,智能手术导航系统是一项具有巨大潜力的新技术。
它为医生们提供了有力的工具,帮助他们在手术中做出更加精确和安全的判断。
然而,我们也必须保持谦虚和谨慎的态度,不断完善和提升这一技术,以造福更多的患者。
神经外科手术的术中导航与显微镜辅助技术

显微镜辅助技术的改进与优化
显微镜辅助技术将不断提高图像质量和分辨率,为医生提供更加清晰、细腻的手术 视野。
未来显微镜将具备更加智能化的功能,如自动对焦、自动曝光、自动白平衡等,减 少医生在手术过程中的操作负担。
随着光学技术和计算机视觉技术的发展,显微镜辅助技术将实现三维立体成像和多 模态图像融合,为医生提供更加全面、准确的手术信息。
联合应用的优势与挑战
技术难度高
术中导航和显微镜辅助技 术的联合应用需要较高的 技术水平和经验积累。
设备成本高
高精度导航系统和显微镜 等先进设备价格昂贵,增 加了手术成本。
适应症限制
并非所有神经外科手术都 适合采用联合应用方式, 需要根据具体病情和手术 需求进行评估和选择。
PART 06
未来展望与发展趋势
作,促进神经功能恢复。
显微镜辅助的优势与局限性
提高手术精确性
显微镜辅助可以放大手术视野,使医 生能够更准确地识别和操作微小的神 经组织和血管。
减少手术并发症
通过精确的操作,可以降低手术过程 中对周围正常组织的损伤,从而减少 术后并发症的发生。
显微镜辅助的优势与局限性
• 改善手术效果:显微镜辅助有助于提高手术的彻底性和安 全性,进而改善患者的预后和生活质量。
手术目的
通过切除、修复或替换病变组织 ,恢复神经系统功能,提高患者 生活质量。
手术适应症与禁忌症
适应症
包括脑肿瘤、脑血管病变、颅脑损伤 、癫痫等神经系统疾病。
禁忌症
严重心、肺、肝、肾功能不全,不能 耐受手术;病变已广泛转移或恶病质 ;凝血功能障碍等。
手术风险及并发症
手术风险
神经外科手术风险较高,涉及重要神经血管结构,可能导致瘫痪、失明等严重 后果。
四川省肿瘤医院数字化手术室技术参数
四川省肿瘤医院数字化手术室技术参数一、系统部分1.目旳和规定*1.1目旳:采用现代计算机技术将既有19个手术间旳每一种手术间旳灯、床、吊塔、腔镜系统整合于每一种手术间旳数字化操控平台,并且各手术间信息共享。
运用移动影像设备为外科手术术、术中放疗以及粒子植入、病理穿刺等治疗模式,提供影像引导下旳精确实时定位。
*1.2方式:模块化组合,将医院既有移动影像设备、数字化手术室、云计划系统整合,并根据医院需要保留扩展功能。
并通过先进旳网络连接在中心内,使所有被授权医生都可以使用任一终端,共享数据。
*1.3构成:移动C型臂/数字化术中专用超声和专用探头,可以无缝整合至手术导航系统。
影像数据和术野数据通过数字化手术室系统,运用医院既有网络同步到医生办公室/会议室/示教室中旳任一联接院内网络旳电脑。
并可将医院未来加装旳不一样移动影像设备,例如移动CT等整合到系统中。
*1.4规定:移动C型臂/术中超声/外科导航/数字化手术室均按照常规电路和网络接口设计,对手术室没有特殊规定。
2.移动影像复合手术室整合平台数字影像/数据交互系统可以整合不一样品牌旳开放性平台,可以实现多影像引导整体手术室旳处理方案,可以处理所有有关复杂外科手术旳工具和诊断设备。
软件可以实现一键式自动融合/一键式3D 重建/一键式自动分割/智能靶区勾画,并可以3D方式展示在医生眼前。
手术室和医生办公室旳数据无缝连接。
可以整合主流术中影像设备,例如主流品牌磁体,CT,C型臂/术中超声等。
2.1 整合C型臂2.1.1 功能先进2.1.1.1通过定位控制中心(操纵杆模块)及触摸屏对四个电动轴进行全面控制2.1.1.2有非接触式遥感防撞控制技术保证患者安全2.1.1.3 有25千瓦以上高性能一体化发生器2.1.1.4 有高级动态冷却系统保证在高规定手术中发生器一直保持最佳温度2.1.1.5 有受检对象探测剂量控制技术在物体移动或在解剖构造旳边缘仍能展现最佳图像质量。
影像导航系统在颅底外科手术中的应用
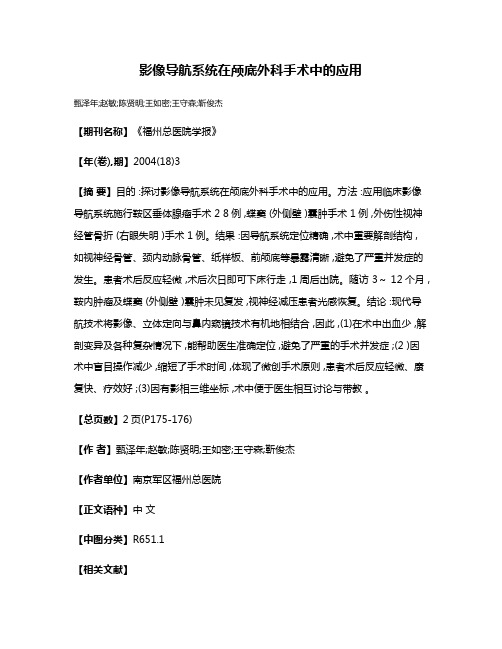
影像导航系统在颅底外科手术中的应用甄泽年;赵敏;陈贤明;王如密;王守森;靳俊杰【期刊名称】《福州总医院学报》【年(卷),期】2004(18)3【摘要】目的 :探讨影像导航系统在颅底外科手术中的应用。
方法 :应用临床影像导航系统施行鞍区垂体腺瘤手术 2 8例 ,蝶窦 (外侧壁 )囊肿手术 1例 ,外伤性视神经管骨折 (右眼失明 )手术 1例。
结果 :因导航系统定位精确 ,术中重要解剖结构 ,如视神经骨管、颈内动脉骨管、纸样板、前颅底等暴露清晰 ,避免了严重并发症的发生。
患者术后反应轻微 ,术后次日即可下床行走 ,1周后出院。
随访 3~ 12个月 ,鞍内肿瘤及蝶窦 (外侧壁 )囊肿未见复发 ,视神经减压患者光感恢复。
结论 :现代导航技术将影像、立体定向与鼻内窥镜技术有机地相结合 ,因此 ,(1)在术中出血少 ,解剖变异及各种复杂情况下 ,能帮助医生准确定位 ,避免了严重的手术并发症 ;(2 )因术中盲目操作减少 ,缩短了手术时间 ,体现了微创手术原则 ,患者术后反应轻微、康复快、疗效好 ;(3)因有影相三维坐标 ,术中便于医生相互讨论与带教。
【总页数】2页(P175-176)【作者】甄泽年;赵敏;陈贤明;王如密;王守森;靳俊杰【作者单位】南京军区福州总医院【正文语种】中文【中图分类】R651.1【相关文献】1.065Insta Trak影像导航系统在鼻窦和颅底外科中的应用 [J], 于博;孙树岩2.影像导航系统在鼻颅底外科手术中的应用 [J], 吕秋萍;孙敬武;陈晓虹;汪银凤;孙家强;姜晓峰;凌士营3.影像导航系统在颅底外科手术中的应用 [J], 甄泽年;赵敏;陈贤明;王如密;王守森;荆俊杰4.新型影像导航鼻内窥镜综合系统在鼻窦与颅底外科手术中的应用 [J], 李锐5.影像导航系统在耳鼻咽喉颅底外科的应用 [J], 宋西成;张庆泉;张华;孙岩;张天振;王锡温因版权原因,仅展示原文概要,查看原文内容请购买。
复旦数字医疗手术导航系统介绍
手术导航系统
• 适应科室:
神经外科、 肿瘤科、 整形外科、 耳鼻喉科、 脊椎与外伤科 。
手术导航系统
• 主机: 定位仪+电脑+UPS+机架
手术导航系统
• 参考架用于定位参考,和头架联合固定
手术导航系统
ห้องสมุดไป่ตู้
核心:计算机辅助手术软件系统
手术导航系统
手术导航系统
手术导航系统
手术导航系统
• 结合MRI,CT数据将探针定位和图像整合显示 • 计算机模拟开颅后脑组织变形尺寸,重新定位 • 提供探针偏离数据和推荐路径(矢、冠、横)
手术导航系统
• 技术:复旦大学数字化医疗研发中心
• 2002年开始,2006年产品定型,2009年销售 • 26个医院用户,大部分在华东三甲医院 • 对手为进口:Brainlab、fiagon(德国)、美敦力
手术导航系统
替代脊柱手术中重复拍摄对医师和病人的损伤
手术导航系统
• 用户:
• • • • • • • • 清华大学玉泉医院 宁波李惠利医院 宁波鄞州人民医院 宁波市第一医院 张家港市第一人民医院 贵阳医学院附属医院 呼和浩特市第一医院 内蒙古医学院附属医院
手术导航系统中器械的可视化与实时跟踪
生物医学工程学杂志J B i om ed Eng 2006;23(5)∶995~998 手术导航系统中器械的可视化与实时跟踪林艳萍∃ 张文强 王成焘(上海交通大学机械与动力工程学院,上海 200030) 摘要 为了在外科手术导航系统中实现手术器械的可视化与实时跟踪,形成了一种从器械模型的建立到实时跟踪的方法。
应用三维实体造型技术或反求技术构建手术器械的模型,完成实体几何模型向三维表面模型的转化,并进行器械的定位标定与精度测试。
术中应用I CP算法实现CT模型与患者位置的空间配准,根据术前标定的位置与方向实时准确地跟踪手术器械的空间位置并在系统中显示,实现器械的可视化与实时跟踪。
器械模型的建立为手术导航系统中器械的可视化与实时跟踪奠定了基础,对于提高手术的可靠性与准确性具有重要的作用。
关键词 手术导航 手术器械 可视化 实时跟踪V isua l iza tion and Rea l-ti m e Track i ng of the I n stru m en tsi n Surg ica l Nav iga tion SystemL i n Yanp i ng Zhang W enq i ang W ang Chengtao(S chool of M echan ica l and P o w er E ng ineering,S hang ha i J iaotong U n iversity,S hang ha i 200030,Ch ina) Abstract In o rder to realize the visualizati on and real2ti m e track ing of the instrum ents in surgical navigati on system,w e use the CAD so lid model of the instrum ents directly o r by reverse engineering,and transfo r m the so lid model to surface model.T hen,the instrum ents,w h ich are fixed w ith locato r,are characterized and tested their p recisi on.A fter registrati on betw een the CT model and the patient site in intra2operati on,the system accurately disp lays the STL model of the instrum ents acco rding to the tracked site and o rientati ons.T he model constructi on of the instrum ents is the base of the surgical navigati on and is i m po rtant to i m p rove the security and p recisi on of operati on.Key words Surgical navigati on Instrum ents V isualizati on R eal2ti m e track ing 在计算机辅助外科手术导航系统中,常常要使用一些用于外科修复的手术器械,如截骨刀、髓腔钉、接骨钉等器械,它们是骨骼和皮肤组织以外重要的待观察与操作物体。
ASA-610V神经外科手术导航系统简介

临床使用过程
术中导航---配准
动态 请点击 小画面
临床使用过程
临床使用过程
临床使用过程
临床使用过程
临床使用过程
具体适应症
手术导航系统 诞生于1986年, 由美国的 Roberts医师 设计制造
90年代初瑞典 的Elekta公司 推出了商业化 的手术导航系 统
导航国内发展历程
导航空间定位技术
安科导航的主要特点
定位精 度高 应用方 便
图像清 晰 性价比 高
——安科导航的高性价比
临床使用过程
临床使用过程
贴标志点
临床使用过程
CT或MR扫描
临床使用过程
获取图像
局域 网 优盘 拷贝
光盘 刻录
移动 PC
临床使用过程
术前计划---
不影响 手术空 间
系统性能 稳定
造型精美 等
实用性强
够用
实用 好用
临床应用医院
安徽省立医院 上海华山医院伽玛刀医院
广州军区总医院
第三军医大新桥医院 无锡二医院 厦门中山医院 湘西自治州医院
20多家 用户
30000多 例成功的 导航手术
安阳人民医院
解放军89医院 解放军154医院 柳州工人医院 桂林人民医院 蚌埠中心医院 焦作煤炭中央医院
具体适应症
• 取 子 弹 术
导航的实用价值(代表微创方向)
导航的实用价值(代表微创方向)
(摘于周良辅教授论文)
临床应用结论
定位精确 度高
骨科手术导航技术的现状与未来

个性化手术导航的发展
1 2 3
个性化导航模板
根据患者的个体差异和手术需求,制定个性化的 导航模板,提高手术的针对性和成功率。
实时动态调整
在手术过程中,根据患者的实时生理数据和手术 进展,动态调整导航方案,确保手术的安全性和 效果。
术后评估与反馈
通过术后评估和反馈机制,不断完善和优化手术 导航技术,提高技术的准确性和可靠性。
技术应用经验总结
提高了手术的精准度和安全性
01
骨科手术导航技术能够实时跟踪手术器械的位置和方向,避免
了对周围组织的损伤,提高了手术的精准度和安全性。
提高了手术效率
02
由于骨科手术导航技术能够精确地定位和操作,缩短了手术时
间,提高了手术效率。
需要专业培训和技术支持
03
骨科手术导航技术需要医生具备专业的技能和知识,同时需要
创伤外科手术导航
创伤外科手术导航技术主要用于骨折的复位固定、关节脱 位的复位等手术。通过导航系统,医生可以精确地定位骨 折或脱位部位,提高手术的准确性和安全性。
创伤外科手术导航系统通常采用X线透视或CT图像引导技 术,能够实时跟踪手术器械的位置和方向,并将数据反馈 到手术导航系统中,以便医生做出准确的判断和操作。
技术发展历程
初始阶段
20世纪90年代初,骨科手术导航 技术开始起步,主要用于骨折复 位等简单手术。
发展阶段
随着技术的不断进步和应用领域 的拓展,骨科手术导航技术在脊 柱、关节等复杂手术中得到广泛 应用。
成熟阶段
目前,骨科手术导航技术已经进 入成熟阶段,在临床实践中得到 了广泛应用和认可。
02
骨科手术导航技术的应用现状
THANKS
感谢观看
外科手术中的术中影像监测与导航技术
外科手术中的术中影像监测与导航技术手术是一种精细而复杂的医疗过程,外科医生需要在手术中准确地掌握病情,并进行精准的操作。
为了提高手术的成功率和安全性,术中影像监测与导航技术应运而生。
本文将探讨外科手术中术中影像监测与导航技术的应用及其优势。
一、术中影像监测技术1. 影像设备术中影像监测技术主要依赖于先进的医学影像设备,如CT扫描、MRI、超声等。
这些设备能够提供高分辨率的图像,帮助医生准确了解病变的位置、形态及周围组织的结构。
2. 术中导航系统术中导航系统将医学影像与手术区域的实时图像相结合,通过计算机算法实现影像导航。
医生可以准确地定位手术器械,规划手术路径并精确操作。
3. 术中三维重建技术术中三维重建技术可以将患者的医学影像数据进行三维模型的重建。
这样,医生可以在手术中通过操作三维模型来指引手术步骤,提高手术的准确性和安全性。
二、术中影像监测技术的应用1. 肝胆外科手术在肝胆外科手术中,术中影像监测技术可以帮助医生准确定位肝脏病变,规划手术切除范围,同时避免损伤重要血管和胆管。
医生可以通过术中导航系统实现实时的手术器械定位,准确切除病变组织。
2. 神经外科手术术中影像监测技术在神经外科手术中发挥着重要的作用。
医生可以利用术中导航系统精确定位脑肿瘤、脑出血等病变,规划手术切除范围,并实时监测手术过程中周围神经结构的情况,避免损伤到正常组织。
3. 心脏外科手术心脏外科手术对手术精度和安全性要求极高,术中影像监测技术成为必不可少的辅助工具。
医生可以通过术中三维重建技术获取患者心脏的精确结构模型,根据模型进行手术规划,并通过术中导航系统来指引手术操作,提高手术的成功率。
三、术中影像监测技术的优势1. 提高手术的准确性术中影像监测技术能够帮助医生准确定位病变、周围组织结构以及重要解剖结构,使手术操作更加准确,减少手术风险。
2. 提高手术的安全性术中影像监测技术可以实时监测手术器械的位置和移动情况,避免损伤到正常组织。
神经外科手术导航系统技术参数
神经外科手术导航系统技术参数一、主机部分:1.所有设备须为同一品牌,必须提供本品牌最高端型号;2.CPU中央处理器速度≥3.0GHz;内存≥8GB,硬盘≥1TB;3.医用高清显示器≥27英寸,支持多点触控功能;专用台车配备工作平台,便于键盘鼠标操作;4.主机自带UPS功能,断电可持续工作10分钟以上;5.具有USB和CD/DVD功能,可将导航过程图像资料刻录到USB和光盘。
具备连接医院局域网络传输标准影像(需承担接口费用);6.主机带有安全防护系统,可自定义用户权限,具有加密,防火墙等功能,保护导航主机数据安全性;7.需提供CFDA/FDA等证明电磁导航技术可应用于神经外科;二、定位追踪系统:1.配置电磁追踪技术,具备同机升级光学追踪技术功能;2.具有DICOM3.0协议标准接口,可连接医院局域网络传输标准影像(需承担接口费用);3.动态参照定位技术,病人和参考架一起移动不影响导航精度;4.提供平板式电磁发生器及床旁电磁发生器两种选项;三、软件系统和临床应用支持:1.配置神经外科导航软件,能开展神经外科肿瘤切除,活检导航手术等;2.能融合多种诊断影像,支持CT/MRI/CTA/MRA/PET/DTI/BOLD的图像融合,可同时对比CT和MRI图像;3.软件设计符合手术流程,可根据不同医生的手术习惯保存设备和工具设置;4.支持医院MRI中的DTI和BOLD等成像模式数据,能够满足功能神经外科中对神经传导束的识别及导航;5.支持用于神经外科的点面双重注册法,通过叠加式注册提高整体注册精度,满足不同的临床要求和使用习惯;6.手术导航系统支持自动探测marker贴位置无需手动选择;7.注册后可检查任何的点位置对应的精度误差;提供导航注册精度区域评价体系(即可用不同颜色在二维空间和三维空间显示手术区域导航精度,二维、三维图像中有手术区域精度偏差小于1MM和2MM的区域精度提示;8.可自动识别、自动切换专用导航工具,无需注册;9.可设计并存储≥10个手术计划,并区分显示,术中可修改手术计划;10.术中实时跟踪手术工具的位置轨迹,同时显示在轴位、矢状位和冠状位影像画面上;11.支持开颅模拟、工具安全范围、内镜入路模拟等高级计划系统;12.具有屏幕自动拍摄和同步录像功能,能将导航图像画面自动拍摄并保存为JPEG格式文件到工作站硬盘,也可同步将导航实时图像进行录像,可直接在软件内预览、编辑;四、导航工具:1.所有工具无需电池供电;2.支持无框架活检导航技术,并有专用活检视角及计划模拟系统,实时查看角度及深度,提供微创无框架追踪技术;3.提供柔性探针,长度>20cm,术中弯折不影响导航精度;4.电磁导航下提供两种参考架模式,可支持无创及颅骨固定两种方式;五、售后及其他:1.提供技术资料、中英文操作手册及维修手册;2.厂家配备专职临床、技术人员,提供免费现场安装、操作培训、维护,以及手术跟台;3.国内有维修中心和零件仓库,(需提供证明文件)。
外科手术导航系统主要用途及功能要求

外科手术导航系统主要用途及功能要求能够满足头颈外科、神经外科、骨科手术导航,可与术中C型臂以及术中超声设备进行整合。
数量:1套1 机型设计1.1 导航系统为最新分体式设计(红外镜头和主机显示系统可分开放置于手术室)2 导航工作站2.1 操作系统为Windows或LINUX2.2 可与数字化手术室系统匹配,共享同一界面,同步显示软件运行,可实现数字化手术室系统与导航双向控制。
2.3 导航工作站配置2.3.1 Intel Xeon 中央处理器2.5 GHz2.3.2 内存≥6GB2.3.3 硬盘≥320 GB2.3.4 ≥4个USB接口,以及CD-RW 和DVD+-RW 传输患者数据2.4 导航系统外部整合2.4.1 具有DICOM3.0接口,符合DICOM3.0协议,与医院PACS/RIS等网络兼容2.4.2 连接面板提供支持最新技术的数字和模拟视频输入端口(支持全高清分辨率),可通过即插即用方式轻松连接手术显微镜、透视镜、内窥镜和超声设备等:2xHDMI,2x 复合(CVBS, SDI),1x S-端子2.4.3 连接面板还包括1 个DisplayPort 1.2 输出,60 赫兹条件下分辨率≥3,600 x 1,080 像素,用于连接独立显示器(全高清3D,4K);以及1 个DVI-I 输出,用于模拟/数字视频输出2.5 主机工作站显示器(包括下述3.2.5.1/3.2.5.2)2.5.1 2个专业彩色液晶,触摸控制,≥26英寸2.5.2 像素分辨率≥1900x12003 导航定位系统:3.1 导航系统跟踪系统:3.1.1 为红外线光学跟踪定位方式3.1.2 导航定位仪:具备主动发射和被动接受功能3.1.3 红外追踪定位装置在术中可随时进行X\Y\Z三向移动和原位转动,可随时自由移动至适宜位置,不影响手术安全和系统坐标的精度3.2 导航系统跟踪定位方式(包括下述3.3.2.1/3.3.2.2)3.2.1 无线红外被动式3.2.2 被跟踪器械与追踪器间无需电线及电池,即可实现手术器械导航3.3 定位参考系统:3.3.1 术中手术床或病人位置的变化不影响注册精度和手术导航进程3.4 红外相机的导航精确度≤±0.1mm3.5 主刀医生术中操作导航为全触摸屏式操作控制导航3.6 无需键盘、鼠标及脚踏开关3.7 隔离变压器500VA,一体化设计220V不间断电源UPS4 注册技术4.1 注册方式:免标记贴的激光注册方式及自动识别标记贴注册方式,标记贴注册方式无需事先标定标记贴编号顺序而系统可自动识别。
WST835-2024手术室医学装备配置标准(1)(2)
ICS11.140CCS C47WS 中华人民共和国卫生行业标准WS/T835—2024手术室医学装备配置标准Medical equipment configuration standard for operating department2024-04-19发布2024-11-01实施目次前 言 (II)引言 (III)1范围 (1)2规范性引用文件 (1)3术语和定义 (1)4总则 (1)5装备分类、配置要求及品目 (2)6设备数量 (2)附录A(规范性)手术室医学装备配置品目和要求 (4)参考文献 (8)前 言本标准为推荐性标准。
本标准由国家卫生健康标准委员会医疗卫生建设装备标准专业委员会负责技术审查和技术咨询,由国家卫生健康委医疗管理服务指导中心负责协调性和格式审查,由国家卫生健康委员会规划发展与信息化司负责业务管理、法规司负责统筹管理。
本标准起草单位:中国医学科学院北京协和医院、中国医学装备协会护理装备与材料分会、中华医学会麻醉学分会、首都医科大学附属北京同仁医院、陕西中医药大学第二附属医院。
本标准主要起草人:吴文铭、潘慧、周力、邱杰、黄宇光、王惠珍、申乐、常青、王古岩、栗文彬。
引言为加强各级医疗机构手术室医学装备配置的合理性、科学性、规范性,特编制《手术室医学装备配置标准》(以下简称《配置标准》)。
本标准共设6章。
主要技术内容有范围、规范性引用文件、术语和定义、总则、装备分类、配置要求及品目和设备数量。
手术室医学装备配置标准1范围本标准确立了各级医疗机构手术室医学装备配置的总体要求和基本原则,规定了医学装备配置的分类、要求、品目和数量。
医疗机构可结合手术室功能定位、手术与麻醉需求和业务发展需要,增配相应装备。
本标准适用于各级医疗机构手术室医学装备的配置。
2规范性引用文件本标准没有规范性引用文件。
3术语和定义下列术语和定义适用于本标准。
3.1手术室operating department在医疗机构内,由手术间和辅助用房等组成的独立功能区域。
神经外科手术导航系统简介ppt课件

6000多套
90年代初瑞典 的Elekta公司 推出了商业化 的手术导航系
统
导航国内发展历程
安科公司 97年 手术导航系统ASA-610V 03年 骨科手术导航系统ASA-630V 累计安装30台、3万多例手术
北京的航空航天大学、上海交通大学 学术研究、初级产品 、试验阶段
为确保导航精度,该 系统采用国际最先进的光学 跟踪定位系统(原装进口加拿 大NDI),所以其精确度符 合国际标准 。
安科导航的主要特点二
——安科导航的图像清晰度
可以看到听神经
安科导航的主要特点二
——安科导航的图像清晰度
三 脑 室 肿 瘤
安科导航的主要特点二
——安科导航的图像清晰度
脑 囊 虫
安科导航的主要特点三
是依靠医学影像、计算 机技术、空间定位技术 来协助手术医生进行精 确手术定位系统。类似
于GPS系统。
手术导航系统的位置传 感器(大眼睛)相当于 空间定位卫星部分,引 导棒和头架跟踪器相当
于地面接收部分。
手术导航基本原理
传统的手术定位
临床体征 定位
X-RAY定 位
CT、 MRI定位
有框架立 体定向
——安科导航应用方便
独有的中文界面给 临床医生应用带来 的方便是不可限量
的
精小的头颅跟踪器安 装方便,省时,不影 响常规铺单,并与多 种手术器械注册器合 为一体更是独具匠心
安科导航的主要特点四
——安科导航的高性价比
1、满足神经外 科、耳鼻喉科需
求
2、具有图像融 合、白质纤维束 导航、显微镜导 航等高端功能
手术导航系统培训
神经外科手术导航系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.2 立体定向神经外科手术
• 传统脑神经外科手术
– 需要打开病人颅骨 –对位于大脑深部的病变无法处理 – 病人康复时间长 – 被感染的机会增加
• 立体定向脑神经外科手术
– – – – 无需开颅,只要在颅骨上钻一个小孔 定位系统引导下将外科器件引入脑内进行手术 病人痛苦减少 安全,康复时间短
5.2 立体定向神经外科手术(续)
• 定向手术成功的条件
– 准确识别组织和病灶
– 确定正确的穿刺路径 和穿刺点
– 在患者头部精确定位
• 传统框架立体定向脑 神经外科手术
– 在扫描图像中规划 – 通过框架定位
5.2 计算机辅助立体定向手术系统
• 计算机辅助手术系统的特色
– 采用标记点定位,抛弃了框架
– 三维脑部模型显示和手术规划
– 机械臂导航和手术支持
– 基于虚拟现实的手术培训和教学
计算机辅助立体定向手术系统
• 计算机辅助立体定向神经外科手术系统集中了 多种计算机图形图像技术。 • 包含有二维医学图象处理、三维体模型和表面 模型的重构、显示以及漫游等功能。 • 在计算机中三维模型的引导下利用机械臂进行 手术路径的导航和手术操作的支持。 • 通过虚拟现实设备,系统同时提供一个虚拟手 术环境,对医生起到培训和教学的作用。
机械臂在模型中的映射(图中黄线为机械 臂前臂的中轴,紫线为规划穿刺路径)
利用机械臂上安装的手术器械排出患者脑 中的囊液
基于虚拟显示的手术培训
• 建立虚拟手术环境的必要性
–在立体定向手术中,医生不能直接观察到患者的脑 部组织,因此医生必须熟练掌握该系统
• 建立虚拟手术环境的基本条件
– 虚拟场景,虚拟患者 – 立体显示设备 – 空间定位设备
p机 T2 p患 p机 T2 T11 p模
p患 T21 p机 p模 T1 T21 p机
5.5 手术导航和手术支持
• 模型中的手术规划转化为机械臂坐标
• 机械臂的任何运动映射到模型上,指导机械臂 的进一步运动 • 机械臂到达预定位置,予以锁定,通过安装在 机械臂上的手术器械进行手术
– 机械误差 – 扫描数据的误差 – 图像处理的误差
• 使用该系统,已经成功了进行了100多例立体 定向脑外科手术
CT/MRI数据 病灶轮廓构勒 脑部体模型和表面模型
三维可视化显示与交互操作
培训和手术模拟
机械臂
手术规划 手术导航和支持
病人
计算机辅助立体定向神经外科手术系统结构图
脑部模型的重构和可视化显示
• 采用手动和半自动轮廓勾勒方法得到病灶 组织和重要组织轮廓 • 由轮廓线重构病灶和其他组织的表面模型
• 使用体模型和面模型混合绘制脑部三维模 型 • 提供多角度,多深度和任意剖面的显示
第五章 外科手术导航系统
5.1
• 神经系统疾病病灶位于脑内深部、周围重要解剖结 构、血管神经包绕。 • 手术需开颅,使患者脑组织暴露出来。精确度高、 难度大。
• 病灶组织的位置和大小的判断完全凭医生对二维图 象的理解,医生的主观经验起决定作用。
• 无法处理大脑深部的病变。 • 立体定向脑外科手术:在颅骨钻一小孔,在定位系 统引导下将探针引如脑内,对病灶点进行活检、放 疗、切除等操作
– 需要辅助的定位设备
系统模型与患者头部的映射
固定在患者头部的标记点 (红色箭头所指)
头部的标记点在CT图像中 的成像(红色箭头所指)
系统模型与患者头部的映射
• 患者头部的四个标记点建立一个仿射坐标系
–头部空间的任意一点的位置M都可以一个仿射坐标 (x,y,z)唯一确定
M o M x M o M1 y M o M 2 z M o M 3
• 模型坐标与患者头部坐标的映射可以用一个变
换矩阵表示。
系统模型与患者头部的映射
• 模型中任意位置与患者头部位置的映射矩 阵及映射公式
xm1 xo y y T1 m1 o z m1 zo 0 p患 T11 p模 xm 2 xo y m 2 yo z m 2 zo 0 xm3 xo y m 3 yo z m 3 zo 0 xo yo zo 1
p模 T1 p患
机械臂与患者头部的校准
• 无动力五自由度机械臂作为手术定位和导航工 具
• 机械臂任何动作都是在其自己独立的坐标系中
完成和计算的
• 要精确定位,必须得到机械臂坐标与患者头部 坐标的映射关系
无动力无自由度机械臂
机械臂与患者头部的校准
• 患者头部固定后,医生操纵机械臂依次接触患 者头部的标记点 • 得到机械臂坐标与患者头部坐标的映射矩阵
背景:
• 计算机图象与图形的迅速发展,为医学图象处 理提供了强有力的工具
• 探测技术的发展医生可以获得越来越多的患者 的医疗数据,但仅基于CT或MRI图象进行病例 分析、诊断和手术规划,已经很难精确完成许 多诸如脑神经外科等复杂的外科手术。
• 一些精细手术难以用常规方法完成,利用机器 人可以完成手术部位的精确定位,实现手术的 最小损伤。
虚拟手术
• 虚拟病人
– 利用网上共享的医疗资料和真实患者的扫描数据
• 虚拟手术
– 按照实际手术操作 – 以机械臂作为空间定位设备 – 可以在人脑内部进行漫游
虚拟手术场景
虚拟手术试验
ห้องสมุดไป่ตู้
虚拟手术中的场景显示
虚拟病人脑组织剖面的放大显示
试 验 与 分 析
• 系统误差小于3.0 mm • 误差产生的原因
起源与发展
• 1906年,英国伦敦皇家医院的DR.Clarke和Horsely 利用脑三维定向仪成功地进行了动物脑定向技术。 • 1986年Stanford医学院的Dr.Roberts最早将立体导航 系统用于临床。
• 1988年美国Kwoh用PUMA260机器人为52岁老人脑活检。
•
•
IBM东京研究所开发CLIPSS系统。包括图像分割、三维重构、可视化、手术模拟及放疗模拟和神经外科手术规划等功能。
量位于病灶的中心 , 使规划中的穿刺路径尽量
避开重要的组织和神经,确保患者的安全和手
术的成功。
术前规划( 图中紫线为规划的穿刺路径), 左上,左下,右 上图是模型三个剖面图,右下为病灶组织的三维结构(红色)
病人脑部病灶的三维表面模型(图中黄线为规划穿刺路径)
5.4 基于标记点的手术校准
• 完成模型到患者的头部正确的映射,必须实现 两个条件: – 在患者的头部建立一个参照坐标系 – 可以在这个坐标系中精确的定位 • 系统采用标记点建立患者头部的参照坐标系 – 克服了框架结构的缺点
图 例
系统半自动提取的颅骨轮 廓(图中红线所示)
实际手术中由医生勾勒的 病灶轮廓(图中红线所示)
5.3 术前规划
• 通过对模型的多角度观察,医生可以对患者脑
部任意位置的状况有一个清楚的了解。
• 医生可以通过系统提供的模型清楚的“观察” 病人的脑组织情况,在模型上进行手术规划和 验证,以确定手术的具体方案。 • 根据各种参数调整手术规划方案,使穿刺点尽
计算机辅助神经外科手术系统的结构
计算机辅助神经外科手术系统是综合 了多种技术的多功能手术支持平台, 包括五大部分: 扫描数据处理 三维数据可视化 手术规划及导航 手术支持 虚拟现实
• • • • •
计算机辅助神经外科手术系统的组成 • 可移动的计算机图形工作站。 • 底座固定在手术室天花板上的智能机械 臂,以及与之相连的手术显微镜、内窥 镜。 • 一套分别安装在机械臂底座、手术头架 和显微镜上的红外线信号发射与接收系 统。 以上三部分用同轴电缆相连