采煤机记忆割煤演示FaceBoss Memory Cut_Chinese
智慧矿业:薄煤层采煤机自动化截割技术

薄煤层采煤机自动化截割技术自动化截割技术为滚筒采煤机按照预定的截割轨迹进行自动割煤完成截割任务的自动化技术,是自动化综采工艺的核心技术。
随着薄煤层自动化开采的广泛应用,自动化截割技术也取得了长足的发展,衍生出两类自动化截割技术:记忆切割技术与预设截割轨迹技术。
记忆切割技术适用于地质条件相对简单的薄煤层综采工作面;预设截割轨迹技术适用于地质条件相对复杂,构造发育、煤厚变化相对较大的薄煤层综采工作面。
一、记忆截割技术1.技术原理记忆切割技术是目前薄煤层自动化综采工作面最为常用的自动化截割技术。
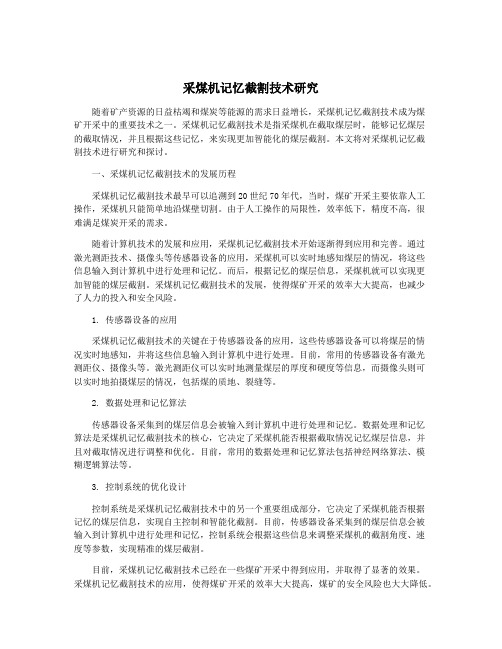
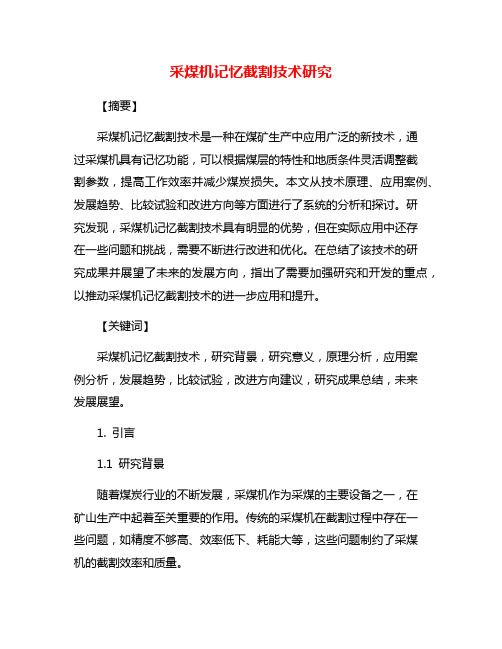
记忆切割为人工控制采煤机沿工作面煤层先割一刀作为示范刀,控制中心将示范刀内采煤机位置及姿态信息进行记录与存储,在工作面正常开采期间,截割流程由示范刀揭示的采煤机控制指令根据行程传感器采集的采煤机位置进行自动控制,当遇煤岩界面异常点时,采煤机司机根据工作面视频监控系统反馈的信息进行煤岩界面的识别,并对采煤机工况参数进行及时修正,经修正完善的采煤循环,作为记忆切割自动化开采新的示范刀,如图1所示。
图1 采煤机记忆截割技术示意图2.适用条件记忆切割技术实施过程中,记忆参数是由示范刀信息揭露获得的,薄煤层综采工作面地质条件复杂多变,需要频繁更新示范刀的信息实现记忆切割,因此记忆切割技术对地质条件的适应性相对较差,仅适用于煤层顶底板相对平整、煤层倾角、煤层厚度变化小的薄煤层工作面。
3.远程控制记忆切割过程中,采煤机远程控制中心根据采煤机行程传感器采集的采煤机行程,对应示范刀中的采煤机工况信息对采煤机前后滚筒的参数进行记忆调整,同时,借助工作面采煤机定位定姿系统及视频监控系统对记忆截割自动化截割参数进行必要的辅助决策。
4.应用案例某煤矿8812工作面主采8#煤层,煤层厚度1.45~1.8m,平均1.64m,煤厚稳定,工作面选用MG2×160/710-AWD型滚筒采煤机,工作面采用自动化综采工艺,利用记忆切割自动化割煤技术。
采煤机记忆截割系统的研究与应用
种形式,包括摇臂相对于机身的摆角、滚筒旋转中
高度和后滚筒最 下 部 截 割 高 度 (卧 底 量), 在 系 统
不同环节使用不同数据形式.
线,在运行过程中若出现读数波动较大、失效等现
2
3 采煤机位置传感器
采煤机在工作面的位置检测与牵引速度传感器
象,需对传感器的安装工况进行排查,查验摇臂铰
e
r
ycu
ys
[
J]Ch
i
naCoa
l,2020,46 (
5):41-46
移动扫码阅读
采煤机记忆截割系统的研究与应用
任予鑫 康向南 杜 昭 马 昆
(国家能源集团宁夏煤业集团枣泉煤矿,宁夏回族自治区银川市,750000)
摘 要 智能采矿中采煤机的记忆截割是自动开采的一个关键要素,采煤机记忆截割系
r
t
t
i
ngsy
s
t
em o
f
y
ycu
she
a
r
e
r,i
n
t
r
oduc
edt
hea
r
r
angemen
to
fva
r
i
ouss
ens
o
r
sus
edi
nt
he memo
r
t
t
i
ngsy
s
t
em o
fshe
a
r
e
r,andexpoundedi
nde
t
a
i
l
ycu
t
hr
e
esy
采煤机记忆截割技术研究

采煤机记忆截割技术研究
采煤机记忆截割技术是一项在采煤机截割过程中实现自适应调整的技术,其基本原理
是通过采集和分析采煤机在不同条件下的工作数据,并根据数据进行自动调整和优化,以
提高采煤机的工作效率和截割质量。
基于采集的数据,可以建立采煤机的工作模型。
这个工作模型可以包括采煤机的性能
参数、工作环境参数等。
通过建立这个模型,可以模拟不同条件下采煤机的工作效果,进
而预测最佳的截割参数。
采煤机记忆截割技术的优势在于其自适应性。
采煤机在截割过程中会受到各种因素的
影响,例如煤层的硬度、采煤机的磨损程度等。
采煤机记忆截割技术可以根据不同的工作
情况自动调整截割参数,以适应不同的工况。
这样可以提高采煤机的工作效率,减少能耗,同时还可以保证截割质量。
采煤机记忆截割技术还可以通过数据分析提供更多有益信息。
通过对采煤机的工作数
据进行分析,可以了解采煤机的磨损情况,预测采煤机的维修周期,提前采取维护措施,
从而延长采煤机的使用寿命。
采煤机记忆截割技术的研究

采煤机记忆截割技术的研究赵远【摘要】介绍了采煤机记忆截割技术的总体方案和工作原理,研究了采煤机位置和姿态定位系统,并建立了采煤机位置定位和姿态定位的空间三维坐标数学模型,介绍了采煤机记忆截割系统的控制和数据回放两大模块,设计了采煤机记忆截割的截割数据记录和回放流程.【期刊名称】《机电产品开发与创新》【年(卷),期】2017(030)004【总页数】3页(P154-156)【关键词】采煤机;记忆截割;位置定位;数据回放【作者】赵远【作者单位】中国煤炭科工集团太原研究院,山西太原030006【正文语种】中文【中图分类】TP29采煤机的自动化控制是实现综采工作面自动化生产的关键技术。
而采煤机自动化控制的关键内容是滚筒的自动调高。
对采煤机滚筒高度的控制,除少数采煤机外,绝大多数还是靠人工操作。
本文介绍了一种采煤机记忆截割技术,尽量减少人工操作,实现对采煤机滚筒自动调高,对工作面的自动化生产、降低工人劳动强度具有积极的意义。
采煤机自动控制的主要内容是采煤机的牵引速度和滚筒高度。
记忆截割是将人工操作的上述数据记录下来,然后进行自动效仿,效仿过程中可以接受人工纠正。
如图1所示为采煤机记忆截割控制流程图,整个控制流程主要分为三个阶段:人工示教阶段、记忆截割阶段、人工纠正阶段。
采煤机控制系统包括:滚筒调高控制和水平牵引控制;滚筒调高是指在采煤机牵引运动时,为了适应工作面煤层厚度的变化,在煤层高度范围内上下调整滚筒的位置;滚筒调高机构主要由油缸伸缩推动摇臂绕定轴线旋转,达到调高目的。
水平牵引是指采煤机机身的横向往复运动。
采煤机滚筒调高的程序记忆控制技术也就是仿形记忆割煤的采煤方法,利用采煤机在工作面的位置与滚筒高度一一对应的关系来实现自动截割,其工作原理为在数据采集模式下,由采煤机司机操作采煤机沿工作面煤层高低起伏的条件先割一刀,系统将采煤机运行的行程位置、滚筒高度位置,采煤机的工作姿态、牵引方向和牵引速度等信息存入到计算机的记忆存储单元;进入仿形截割模式后,采煤机运行动作和指令根据先前采集的运行工作参数自动运行;若煤层条件发生较大人变化时,采煤机司机手动操作割煤,并自动覆盖存储器以前该点的工作参数并保存,修改后的参数作为下一刀采煤机调高的参数。
采煤机记忆截割技术研究
采煤机记忆截割技术研究随着矿产资源的日益枯竭和煤炭等能源的需求日益增长,采煤机记忆截割技术成为煤矿开采中的重要技术之一。
采煤机记忆截割技术是指采煤机在截取煤层时,能够记忆煤层的截取情况,并且根据这些记忆,来实现更加智能化的煤层截割。
本文将对采煤机记忆截割技术进行研究和探讨。
一、采煤机记忆截割技术的发展历程采煤机记忆截割技术最早可以追溯到20世纪70年代,当时,煤矿开采主要依靠人工操作,采煤机只能简单地沿煤壁切割。
由于人工操作的局限性,效率低下,精度不高,很难满足煤炭开采的需求。
随着计算机技术的发展和应用,采煤机记忆截割技术开始逐渐得到应用和完善。
通过激光测距技术、摄像头等传感器设备的应用,采煤机可以实时地感知煤层的情况,将这些信息输入到计算机中进行处理和记忆。
而后,根据记忆的煤层信息,采煤机就可以实现更加智能的煤层截割。
采煤机记忆截割技术的发展,使得煤矿开采的效率大大提高,也减少了人力的投入和安全风险。
1. 传感器设备的应用采煤机记忆截割技术的关键在于传感器设备的应用,这些传感器设备可以将煤层的情况实时地感知,并将这些信息输入到计算机中进行处理。
目前,常用的传感器设备有激光测距仪、摄像头等。
激光测距仪可以实时地测量煤层的厚度和硬度等信息,而摄像头则可以实时地拍摄煤层的情况,包括煤的质地、裂缝等。
2. 数据处理和记忆算法传感器设备采集到的煤层信息会被输入到计算机中进行处理和记忆。
数据处理和记忆算法是采煤机记忆截割技术的核心,它决定了采煤机能否根据截取情况记忆煤层信息,并且对截取情况进行调整和优化。
目前,常用的数据处理和记忆算法包括神经网络算法、模糊逻辑算法等。
3. 控制系统的优化设计控制系统是采煤机记忆截割技术中的另一个重要组成部分,它决定了采煤机能否根据记忆的煤层信息,实现自主控制和智能化截割。
目前,传感器设备采集到的煤层信息会被输入到计算机中进行处理和记忆,控制系统会根据这些信息来调整采煤机的截割角度、速度等参数,实现精准的煤层截割。
采煤机记忆截割技术研究
采煤机记忆截割技术研究采煤机记忆截割技术是一种新型的采煤机截割技术,具有很高的应用价值。
该技术主要是针对传统采煤机截割中存在的一些弊端而开发的。
本文将从技术简介、技术优势、技术发展前景等方面对该技术进行详细介绍和分析。
技术简介采煤机记忆截割技术主要是通过在采煤机上安装一个激光传感器,用于检测煤岩层的硬度和厚度。
同时,还需要安装一个智能控制系统,将激光传感器采集到的数据进行分析和处理,并控制采煤机的行走和截割。
简单来说,采煤机记忆截割技术类似于一种智能感知系统,能够根据煤岩层的情况自动调整采煤机的运行状态,以达到更加高效和安全的采煤效果。
技术优势采煤机记忆截割技术具有多个优势。
首先,该技术可以实现采煤机的自动化控制和智能化操作,大大减少了人力操作的需求,同时提高了采煤的效率和安全性。
其次,采煤机记忆截割技术可以在实时监测煤岩层的硬度和厚度的同时,收集相关数据,为后续的采煤工作提供参考和数据支持。
再次,该技术可以精确控制采煤机的截割位置和深度,减少煤损率,从而降低生产成本。
技术发展前景采煤机记忆截割技术是一项发展前景广阔的技术,尤其在当今信息化、智能化的时代,更加符合未来采煤工业的发展方向。
未来,随着科技的不断发展和应用,采煤机记忆截割技术将会进一步完善和升级,不仅在煤炭行业有着广泛的应用前景,还可以向其它行业进行拓展,如建筑、通信等行业,为其提供更加先进的科技支持。
总之,采煤机记忆截割技术是一个值得关注和推广的技术,在未来的采煤工作中肯定会发挥越来越重要的作用,促进采煤行业向信息化、智能化、高效化、安全化的方向发展。
采煤机记忆截割技术研究
采煤机记忆截割技术研究
采煤机记忆截割技术是一种应用于煤矿开采中的新型截割技术,旨在改善传统截割机在截煤过程中的效率和安全性。
采煤机记忆截割技术通过记忆采煤机的历史截割轨迹,在后续的截割过程中进行自动化的优化控制,从而实现更高效、更安全的截割作业。
具体来说,采煤机记忆截割技术可以通过分析截割速度、截割深度、截割力和截割角度等参数,确定最佳的截割参数组合,并将其记录下来作为参考,以实现截割过程的优化控制。
采煤机记忆截割技术还可以通过监测采煤机在截割过程中的状态变化和截割机构的振动情况,及时判断截割机的工作状态,并根据需要进行相应的调整和优化。
采煤机记忆截割技术的应用可以显著提高采煤机的截割效率和安全性。
通过优化的截割参数组合,可以使采煤机在截割过程中更加高效地开采煤炭,提高采煤效率。
采煤机记忆截割技术可以根据不同的煤层条件和截割机构的变化,自动调整截割参数,避免了传统截割机需要人工调整的繁琐操作,提高了截割的准确性和稳定性。
最重要的是,采煤机记忆截割技术可以通过实时监测截割过程中的振动情况,及时发现截割机构的故障和异常情况,提前采取相应的措施,保障了截割作业的安全性。
煤与瓦斯突出矿井综采工作面自动截割三角煤技术的研究与应用

煤与瓦斯突出矿井综采工作面自动截割三角煤技术的研究与应用王瑞军;崔志芳【摘要】基于采取现场调查分析以及现场生产实践,从介绍自动截割三角煤技术的关键点及试验过程入手,研究阳煤集团新元公司3107综采自动化工作面自动截割三角煤技术的应用为进一步研究煤与瓦斯突出矿井的综采工作面自动化技术提供理论和实践依据.【期刊名称】《机械管理开发》【年(卷),期】2016(000)012【总页数】3页(P74-76)【关键词】煤与瓦斯突出;综采工作面;自动截割;三角煤【作者】王瑞军;崔志芳【作者单位】山西新元煤炭有限责任公司,山西寿阳045400;山西新元煤炭有限责任公司,山西寿阳045400【正文语种】中文【中图分类】TD823.2煤与瓦斯突出矿井综采工作面,由于煤层瓦斯对井下作业人员的生命安全有着严重威胁,间接制约了综采自动化技术的推广应用,尤其对传统的割三角煤工艺,涉及到端头的管理、采煤机与支架的独立作业,各岗位人员参与多,作业环境不安全因素多,已经成为实现我国煤与瓦斯突出矿井工作面自动化技术的瓶颈。
通过革新截割三角煤工艺,结合采煤机记忆割煤功能,达到工作面回采过程无人或少人作业的目标要求,对推动煤与瓦斯突出矿井的综采工作面自动化技术发展具有重大的理论意义和实际应用价值。
阳煤集团新元公司先后在3205工作面、3415工作面成功应用了综采自动化技术,但由于技术条件不成熟,自动截割三角煤功能一直处于探索阶段。
为了保证综采自动化工作面安全高效的生产,新元公司3107综采自动化工作面在实现原有综采技术的基础上,重点针对记忆截割三角煤工艺进行了探索研究,并形成了新元公司综采自动化工作面关于记忆截割三角煤工艺的指导理论与成套技术,减少岗位人员数量、提高生产效率、促进煤与瓦斯突出矿井采煤工艺的技术革新,为推进煤矿产业升级、建设自动化矿井进行了有益的探索。
1.1 地质条件阳煤集团新元公司3107工作面走向长1591.4m,工作面倾斜长240m,面积381936m2,煤层平均厚度为2.82 m,可采储量为1 432 489 t。
JOY7LS8型采煤机FACEBOSS人机界面简介综述

JOY7LS8型采煤机FACEBOSS人机界面简介2.1FACEBOSS煤机主人机界面2.1.1 FACEBOSS 控制系统介绍在对煤机注人机界面介绍之前先对FACEBOSSS控制系统进行简单的了解。
FACEBOSS 是久益通用控制平台的一部分,具有与JOS(久益顺槽控制系统)的接口。
JNA FACEBOSS 使用煤机安装的计算机来显示一系列的屏幕,这些屏幕帮助煤机司机和维修人员对煤机进行操作和诊断。
显示屏幕给司机提供煤机操作的详细信息,其他屏幕可以提供对煤机设定的操作。
这些屏幕允许有密码的操作人员根据开采的工况来配置煤机的操作功能。
除JNA FACEBOSS主页面外所有的屏幕都有一个工具条,工具条位于屏幕的左部和底部。
煤机上电后首先显示主页屏幕。
JNA FACEBOSS使用一整套硬件来监控采煤机为了更清楚的了解和使用屏幕所提供的功能,我们先对主要硬件简单进行介绍。
下图为网络主要硬件:CCU(中央控制器)是FACEBOSS系统的注控制器,CCU使用标准工业通讯协议与可灵活配置的输入/输出模块通讯,实现对煤机所有功能的监控。
图形用户界面是一个全色的,支持多种语言的显示计算机,可以通过鼠标,翻页器,或者任一个遥控器进行操作。
显示计算机屏幕按菜单图标分组,这些图标和煤机上每一台电机或者部件相对应。
通过点击每个屏幕左上角的图标可以在英文和中文之间切换。
FACEBOSS 控制系统为每台电机,和急停回路,所有的输入输出状态,趋势提供了完整的屏幕诊断功能,以及用于角度计标定,煤机支架联动,过程表,和速度区间设定的友好的用户界面。
用户可以操作煤机的特定参数,并可保存和恢复参数修改。
RIO(远程输入输出模块)用于监控所有非本安的输入/输出。
RIO 模块通过Interbus通讯连接与CCU通讯。
每个RIO模块的屏幕诊断包括:通讯状态诊断和各输入输出端口状态诊断。
DIOM(数字输入输出模块)用于驱动所有24VDC液压电磁阀并监测24VDC数字输入和0到10VDC的模拟量输入。
综采工作面采煤机实现远程控制和记忆截割功能

综采工作面采煤机实现远程控制和记忆截割功能史莉红【摘要】根据阳煤集团新元公司310205综采工作面自动化的要求,配置相关控制模块与传感系统,通过动力线载波通讯方式,使采煤机实现了远程控制和记忆截割功能,对其带来的优势进行分析总结.【期刊名称】《江西煤炭科技》【年(卷),期】2013(000)004【总页数】2页(P154-155)【关键词】采煤机;远程控制;记忆截割;分析;总结【作者】史莉红【作者单位】山西新元煤炭有限责任公司,山西阳泉045000【正文语种】中文【中图分类】TD823.97随着煤炭工业信息化与工业化融合的加快,机电一体化技术、计算机和网络技术与煤矿装备的结合使得煤矿生产过程实现自动化具备了可行条件。
阳煤集团从1982年引进德国采煤机、波兰生产溜、英国综采支架实现综采机械化采煤以来,历经30多年一直沿用机械化采煤,直至现阶段国内外都在由机械化采煤向自动化采煤的转型升级。
阳煤集团急需实现综采自动化采煤来改变以前机械化采煤工作面人员多、环境恶劣、劳动强度大、安全保障低,极大限制了设备效能和煤炭产能,因此,需要依靠科技创新提高综采设备自动化装备水平,实现工作面“人少则安,无人则安”安全理念,真正达到减人提效的目的,积极提升企业形象,建立数字化矿井迫在眉睫。
新元公司310205工作面全面实现自动化控制、特别是对采煤机通过配置相关控制模块与传感系统,结合顺槽监控箱,通过动力线载波通讯方式,将采煤机数据传输至放置于设备列车上的顺槽监控箱,实现采煤机的自动化控制功能,真正意义上实现自动化工作面安全生产、高产高效、减人提效的目标。
1 采煤机远程控制和记忆截割功能的系统组成采煤机的自动化系统由采高传感器、行走位置传感器、机身姿态传感器、中压耦合器、载波模块及顺槽监控箱组成(见图1);中压耦合器与载波模块安装于采煤机上,实现采煤机数据及控制信息与顺槽监控箱的双向传输(见图2);顺槽监控箱由防爆箱、工控机、载波模块、耦合模块、PLC组件、电源组件、显示模块、键盘模块等组成实现通讯(见图3);顺槽监控箱与天玛公司接口:RS485、MODBUS RTU协议。
采煤机记忆截割技术研究

采煤机记忆截割技术研究采煤机是一种用于在煤矿或其他地下作业中进行煤炭开采的机械设备。
截割技术是采煤机的核心部分之一,用于将煤炭从煤矸石中分离出来。
本文将研究采煤机记忆截割技术的原理和应用。
记忆截割技术是一种基于道路截割的新技术。
在传统的截割技术中,采煤机截割煤层的方式是通过钎杆和切割齿。
记忆截割技术通过将道路信息存储在采煤机的控制系统中,使得采煤机能够记忆并重现截割前的道路形态。
当采煤机进行下一次截割时,控制系统将通过对比当前道路形态和存储的道路信息,使得切割齿按照前一次截割的轨迹进行运动,从而实现精确的截割。
记忆截割技术的优点是能够提高采煤机的截取率和煤炭的产量。
由于切割齿能够按照相同的轨迹进行运动,它们能够更精确地截取煤层,减少能量的浪费,提高开采效率。
记忆截割技术还能够减少人工干预,降低了煤炭开采过程中的危险因素,提高了工作环境的安全性。
记忆截割技术的应用也非常广泛。
它可以应用于各种类型的采煤机,包括链斗式采煤机、滚筒采煤机和转载机。
记忆截割技术还可以与其他创新技术相结合,如机器视觉和自动化控制技术。
通过将机器视觉技术应用于采煤机,可以实现实时的煤层检测和道路形态识别,提高截割的准确性和效率。
自动化控制技术则能够使采煤机在开采过程中实现自主导航和自主操作,进一步提高开采效率和安全性。
采煤机记忆截割技术是一种应用广泛且发展迅速的煤炭开采技术。
它通过将道路信息存储在控制系统中,使得采煤机能够记忆并重现截割前的道路形态。
记忆截割技术能够提高采煤机的截取率和煤炭的产量,并降低人工干预和工作环境的危险因素。
它还可以与其他技术相结合,进一步提高开采效率和安全性。
随着科技的不断进步,采煤机记忆截割技术有望在未来发展出更多创新应用。
Faceboss采煤机记忆割煤的应用实践

Faceboss采煤机记忆割煤的应用实践
索智文
【期刊名称】《煤矿开采》
【年(卷),期】2009(014)005
【摘要】介绍了JOY公司7LS1A型FACEBOSS系统采煤机记忆割煤在榆家梁44305工作面的应用情况及使用方法,并简述了记忆割煤常见故障、适用条件及应用前景.
【总页数】3页(P65-66,85)
【作者】索智文
【作者单位】神华神东煤炭集团设备管理中心,陕西,神木,719315
【正文语种】中文
【中图分类】TD421.6
【相关文献】
1.采煤机记忆割煤数学分析及实现方法 [J], 孙卓
2.综采工作面采煤机记忆割煤技术的实现 [J], 王云龙
3.07LS06C采煤机记忆割煤的应用研究 [J], 杨辉
4.基于扩展截割路径的采煤机端头记忆截割方法探索 [J], 王左生
5.基于记忆割煤方法的采煤机监控系统设计 [J], 贾文; 李玉虎; 丰界泽; 赵义; 邸晟钧; 刘顺; 闫孝姮
因版权原因,仅展示原文概要,查看原文内容请购买。
综采煤机记忆割煤

安全标牌
在设备上可以发现如下标牌。 要确保工作在设备附近的每一个人都了解它们 所表示的危险并知道如何避免。 不要拆除、遮盖、 涂抹和损坏这些安全标牌。
介绍
长壁设备的操作区被分为三个不同的区域。区域划分如下图所示,其描述如 下。
1. 禁止区 - 禁止进入此区域。
2. 限制区域 - 可因维修作业或煤机上电要求进入此区域。隔离与作业相关的 所有动力源,根据工作面的状况,伸出护帮防护,否则严禁进行作业。
3. 人行通道区 - 可通过此区域进出工作面。当长壁设备运行中,进入此区域 时必须小心。
危险标牌提醒您注意紧急危险情况, 如不避免将造成严重的伤亡事故。事实 上这都是一些直接危险,如不采取相应的预防措施, 发生严重甚至致命事故 的可能性极大。
警告标牌提醒您注意潜在危险情况, 如不避免可能会造成严重的伤亡事故。 事实上,这些危险带来的伤害是很严重的,如不采取适当的预防措施, 将会 引起严重的甚至致命的事故。
如果发现标牌损坏、缺失或模糊不清, 应请求 Joy 公司进行更换。
ॅ䰽
㓈ׂПࠡᑨߛᮁ⬉ ⑤DŽ
此标牌位于电控箱和电机等与电源连接的设备上,它警告 这里存在高电压危险。 在没有切断设备电源的情况下, 决 不允许在电控箱内部或设备上任何有此标牌的部位进行作 业。
D-2
ॅ䰽
此标牌位于摇臂的每一侧,意在警告这里存在被旋转的滚 筒或下降的挡煤罩或下降的摇臂压切致伤的危险。 在进入
为了确保设备操作人员或周围人员的人身安全,必须严格遵守有关井下采矿设备安全操作和 维护方面的所有地方及国家的法律、规章和惯例。
采煤机记忆截割技术研究
采煤机记忆截割技术研究【摘要】采煤机记忆截割技术是一种在煤矿生产中应用广泛的新技术,通过采煤机具有记忆功能,可以根据煤层的特性和地质条件灵活调整截割参数,提高工作效率并减少煤炭损失。
本文从技术原理、应用案例、发展趋势、比较试验和改进方向等方面进行了系统的分析和探讨。
研究发现,采煤机记忆截割技术具有明显的优势,但在实际应用中还存在一些问题和挑战,需要不断进行改进和优化。
在总结了该技术的研究成果并展望了未来的发展方向,指出了需要加强研究和开发的重点,以推动采煤机记忆截割技术的进一步应用和提升。
【关键词】采煤机记忆截割技术,研究背景,研究意义,原理分析,应用案例分析,发展趋势,比较试验,改进方向建议,研究成果总结,未来发展展望。
1. 引言1.1 研究背景随着煤炭行业的不断发展,采煤机作为采煤的主要设备之一,在矿山生产中起着至关重要的作用。
传统的采煤机在截割过程中存在一些问题,如精度不够高、效率低下、耗能大等,这些问题制约了采煤机的截割效率和质量。
为了解决这些问题,采煤机记忆截割技术应运而生。
该技术利用先进的信息技术和智能控制算法,通过对煤层结构和地质条件等数据的采集、分析和记忆,实现对采煤机截割过程的智能化控制,从而提高截割精度和效率,降低能耗和成本。
目前关于采煤机记忆截割技术的研究还比较有限,很多技术仍处于实验室阶段,缺乏实际应用案例和比较试验数据,因此有必要对该技术进行深入研究和探讨。
随着煤炭资源的逐渐枯竭和环境保护要求的提高,采煤机记忆截割技术的发展具有重要的现实意义和战略意义。
1.2 研究意义采煤机记忆截割技术可以提高煤矿生产效率。
传统的煤炭开采方式往往需要大量的人力和物力,而采煤机记忆截割技术可以通过自动化、智能化的方式进行煤炭开采,降低了人力成本和生产周期,提高了煤矿生产效率。
采煤机记忆截割技术的研究与应用可以推动煤炭开采行业向着智能化、高效化方向发展,增强煤炭产业的竞争力。
在当前经济转型升级的背景下,煤炭行业需要不断探索新的技术手段,提高自身的发展水平,而采煤机记忆截割技术正是符合这一需求的技术之一。
采煤机记忆截割技术研究

采煤机记忆截割技术研究【摘要】采煤机记忆截割技术是一种应用于煤矿开采的先进技术,通过记录和回放记忆截割轨迹,实现精准快速的煤矿开采。
本文从研究背景、研究意义和研究目的入手,探讨了采煤机记忆截割技术的原理、发展历程、应用领域、优势和关键技术。
通过对技术的深入分析,发现该技术在提高煤矿开采效率、减少人力成本、保障工人安全等方面具有重要意义。
未来,采煤机记忆截割技术有望在智能化、自动化方面继续发展,推广应用范围将进一步扩大。
本文旨在为读者深入了解采煤机记忆截割技术提供重要参考,促进技术在煤矿开采中的广泛应用和推广。
【关键词】采煤机记忆截割技术、研究背景、研究意义、研究目的、原理、发展历程、应用领域、优势、关键技术、未来发展方向、推广和应用1. 引言1.1 研究背景采煤机记忆截割技术作为矿山生产中的重要技术之一,在煤矿生产中扮演着至关重要的角色。
煤炭是全球主要的燃料资源之一,而矿山采煤机作为煤炭采掘的重要设备,其效率和安全性直接影响着矿山生产的成本和效益。
采煤机记忆截割技术的出现,为煤矿生产提供了一种全新的解决方案,能够提高采煤机的工作效率,减少人为操作的需要,从而降低生产成本,提高安全性。
目前采煤机记忆截割技术在国内还处于起步阶段,存在着技术不够成熟、应用不够广泛等问题。
有必要对采煤机记忆截割技术进行深入研究和探讨,以进一步完善该技术,提高其应用性能,推动其在煤矿生产中的广泛应用。
本文将从研究背景、研究意义和研究目的三个方面展开探讨,希望能为采煤机记忆截割技术的进一步发展提供一定的参考和指导。
1.2 研究意义采煤机记忆截割技术的研究是当前矿业领域的重要课题。
其研究意义主要体现在以下几个方面:1.提高采煤效率:采煤机记忆截割技术的应用可以提高煤矿的开采效率,减少人力资源的投入,降低采矿成本。
2.减少事故风险:采煤机记忆截割技术可以帮助矿工避免在煤矿作业中因操作不当而造成的事故,提高工作安全性。
3.促进煤炭行业发展:采煤机记忆截割技术的研究和应用可以促进煤炭行业的现代化和智能化发展,提升煤矿企业的竞争力。
采煤机记忆截割学习与自动操作使用说明修改
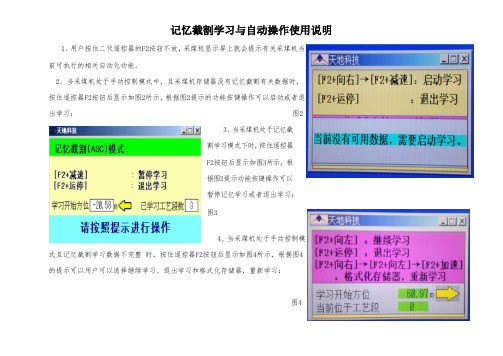
记忆截割学习与自动操作使用说明1、用户按住二代遥控器的F2按钮不放,采煤机显示屏上就会提示有关采煤机当前可执行的相关自动化功能。
2、当采煤机处于手动控制模式中,且采煤机存储器没有记忆截割有关数据时,按住遥控器F2按钮后显示如图2所示,根据图2提示的功能按键操作可以启动或者退出学习:图23、当采煤机处于记忆截割学习模式下时,按住遥控器F2按钮后显示如图3所示,根据图3提示功能按键操作可以暂停记忆学习或者退出学习:图34、当采煤机处于手动控制模式且记忆截割学习数据不完整时,按住遥控器F2按钮后显示如图4所示,根据图4的提示可以用户可以选择继续学习、退出学习和格式化存储器,重新学习:图45、当采煤机处于手动控制模式,且记忆截割学习数据完整,按住遥控器F2按钮后显示如图5提示用户可以选择启动/恢复自动截割、完全退出、选择启动工艺段和格式化存储器,重新学习:图56、当煤机处于自动割煤模式下且人工干预进入中断状态(人工干预状态是不会覆盖之前的记忆截割学习记录的)的情况下,按住遥控器F2按钮后显示如图6提示用户可以选择打开在线修改、退出人工调整、完全退出自动截割,这时候如果选择退出人工调整即可退出因为人工干预引起的中断状态图67、当煤机处于自动割煤模式下,且在线修改功能(该功能可以覆盖部分之前记忆截割学习的记录)被打开后,按住遥控器F2按钮后显示如图7提示用户可以选择退出在线修改、完全退出自动截割:图78、当煤机处于自动割煤模式下,采煤机的传感器发出的报警提示时,按住遥控器F2按钮后显示如图8提示,用户可以选择清除报警、完全退出自动截割:图8一个正常的记忆截割学习过程中,记忆循环深度不允许超过30,并且在端头处的循环深度不可以超过15。
当采煤机处于自动割煤模式下时,采煤机司机给采煤机发送牵引有关的控制指令(包括加减速、换向)后,采煤机即进入牵引中断状态,牵引中断不会自动恢复,必须煤机司机通过遥控器按“F2+减速”手动退出。
Faceboss采煤机记忆割煤的应用实践
表 1为双 向割 煤典 型 的顺 序 ,本顺 序表 采用 重复 模
66
孟
清 :煤 峪 口矿 37盘 区冲 击矿 压 综 合 防 治 0
20 0 9年 第 5期
( )开采 冲击 矿压 煤 层 ,必 须 编 制 专 门设 计 3
( 如煤 层注水 设计 、卸 孔及 卸压 爆破 孔设 计 等 ) 。
索智 文
( 神华神 东煤炭集 团设备 管理 中心,陕西 神木 7 9 1 ) 1 35
[ 摘
要 ] 介绍 了 J Y公司 7 S A型 F C B S O L1 A E O S系统采煤机记 忆割煤在榆 家梁 4 3 5工作面 的 40
应用情况及使用方法 ,并简述 了记 忆割煤 常见故障、适用条件及应用前景 。
第1 4卷 第 5期 ( 第 9 总 0期 )
20 0 9年 1 0月
煤
矿 开
采
V 1 1 N . ( eis o 9 ) o. 4 o5 Sr .0 eN
Oc o r 20 tbe 09
Co lm i n c oo y a nig Te hn lg
F c
2 2 记 忆 割煤关键 参 数设置 .
记忆 割煤 前需对 采煤 机 的一些 关键 参数进 行设 置 ,参数 的设 置将 直接关 系 到采煤 机能 否正确 地进 行记 忆 割煤 ,所 有 参 数 在 采 煤 机 C U ( C 中央 控 制
计算 机 ) 中进 行设 置 ,主要设 置 以下几类 参数 : ( ) 采煤 机 的外 型 尺 寸 在 记 忆 割煤 前 要 准 1
6 5
总第 9 0期
煤
矿 开 采
20 0 9年 第 5期
角 ,然后 经过 程序换 算成 摇臂 的高度 ,2个 D齿 轮 传感 器分别 安装 在左 右牵 引块 的 D齿 轮 上 ,通过 2 个传 感器形 成 的相位 差来 计算 采煤 机 的位 置及 牵 引
采煤机记忆截割技术研究
采煤机记忆截割技术研究采煤机记忆截割技术是一种新型的煤矿智能化技术,在实际运行中具有显著的优势和应用前景。
本文将对该技术的基本概念、实现方法、作用和应用前景做一个简要的介绍。
一、技术概述采煤机记忆截割技术是指在采煤机上设置一套记忆系统,可记录采煤机在工作过程中的每一步操作,并根据实际情况对该次操作的切割参数进行优化。
这样可以在后续的工作中,针对同一类煤层的采煤作业,进行参数自适应调节,提高作业效率和切割精度。
二、实现方法采煤机记忆截割技术的实现方法主要分为硬件和软件两个方面。
硬件上,该技术需要在采煤机上安装一套先进的数据记录仪和传感器组件,以实时记录采煤机的运行状态和工作参数。
软件上,则需要配备一套智能计算系统,对采集到的数据进行分析和处理,并形成具体的优化方案。
三、技术作用采煤机记忆截割技术对煤矿生产的作用主要体现在以下三个方面:1.提高煤炭回收率。
通过对历史数据的分析,智能计算系统可以确定适宜的切割参数和工作路径,从而最大限度地提高煤炭回收率。
2.减少环境污染。
采煤机记忆截割技术中还设置了一种自动灰尘除尘系统,可以在采煤过程中有效地收集粉尘和废料,减少环境污染。
3.提高煤炭采掘效率。
通过实时调节采煤机的参数,避免了由于抠刀、倏水等因素造成的停滞现象,提高了煤炭采掘效率。
四、应用前景采煤机记忆截割技术虽然还处于初级研究阶段,但是其应用前景已经得到了广泛的认可。
目前,国内外很多大型煤炭生产企业已经开始在采煤机中推广该技术,一些智能煤矿的建设也将该技术列为重要的技术选项之一。
综上所述,采煤机记忆截割技术作为煤炭生产领域的一项新技术,不仅为煤炭生产的智能化和高效化提供了有力支持,也为保障采煤机的工作安全和环保作出了贡献。
随着其相关技术的不断发展和完善,相信该技术将在煤炭生产领域发挥越来越大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
过程表:<新> 右摇臂 模式 基准
插入过程表区段 输入该区段开始的支架号 最小 最大
开始 结束 方向 左摇臂模式
右摇臂模式
下一项
取消
Creating a Sequence Table 创建过程表
区段
方向 支架 开始 停止 左摇臂 模式 基准
过程表:<新> 右摇臂 模式 基准
插入过程表区段 输入该区段结束的支架号 最小 最大
插入
编辑
删除
保存
另存为
应用
退出
Creating a Sequence Table
创建过程表
区段 方向 支架 开始 停止 左摇臂 模式 基准 过程表:<新> 右摇臂 模式 基准
插入
编辑
删除
保存
另存为
应用
退出
Creating a Sequence Table 创建过程表
区段 方向 支架 开始 停止 左摇臂 模式 基准
切深: 降低切深控制区间 的中点
切深控制
溜槽
切深25mm 例如: 切深控制最大区间=100mm 切深=25mm 尾滚筒高度限制在: 溜槽底板以上75mm 溜槽底板以下125mm 切底深度是尾滚筒底缘至溜槽底板的距离 只适用于等高定差模式
Sequence Steps 过程区段
STEP
过程区段
• A sequence step is a programmable area between a set of supports
Auto Modes 自动模式
•MANUAL MODE •手动模式 Boom heights are manually controlled by the operator 摇臂高度可由司机手动控制. •LEARN/REPEAT MODE •学习/重复模式 Memory Cut records boom heights during a “learn” pass, then repeats the same profile on each subsequent “repeat” pass, allowing variable seam extraction.
右D-齿轮传感器 (作为安全检查, 来 确保支架计数的正 确)(返回检查)
左多用输入/输出模块
右多用输入/输出模块
Critical Machine Dimensions
煤机的重要尺寸
支腿中心距 Z尺寸 最大高度 滑靴中心线 X尺寸 摇臂长度 该长度除以2为正确的X尺寸 滚筒直径 尺寸
Y尺寸 摇臂角度真值偏差 支腿中心距 (到溜槽底板)
Creating a Sequence Table 创建过程表
区段
方向 支架 开始 停止 左摇臂 模式 基准
过程表:<新> 右摇臂 模式 基准
插入过程表区段
选择该区段左摇臂的工作模式 手动 程序 重复 PDIF(等高定差模式) PDIF基准
开始 结束 方向 左摇臂模式
右摇臂模式
返回
下一项
取消
Creating a Sequence Table 创建过程表
过程表பைடு நூலகம்<新> 右摇臂 模式 基准
插入过程表区段 . 选择该区段右摇臂的工作模式 手动
开始 结束 方向 左摇臂模式 左定差 右摇臂模式
程序 重复
PDIF(等高定差模式) PDIF基准
返回
下一项
取消
Creating a Sequence Table 创建过程表
区段
方向 支架 开始 停止 左摇臂 模式 基准
右摇臂
REF Offset -1000 +2000 +1000 +1000
区段 方向 开始 停止 模式 基准 高度差 模式 基准 高度差
1L +1000 -1000 +2000 1R
1区段
2区段 驻车
3区段
4区段 驻车
Sequence Table Editor过程表编辑器
区段 方向 支架 开始 停止 左摇臂 模式 过程表:表2 右摇臂 基准 模式 基准
摇臂以过程表的给定高度定位.
•PROGRAM DIFFERENCE MODE (P-Diff) •等高定差模式(P-Diff) The trailing drum is positioned above/below a reference source by a constant specified offset, allowing fixed seam extraction. The reference source can be the leading drum, or a stored height from a previous step. 尾滚筒以高于/低于基准的给定偏差量来定位, 适应开采固定厚度煤层. 基准可以是前滚筒, 或前步存储 的高度.
高度差
第二区段
溜槽
Pan Control
切深控制最大区间: 允许尾滚筒高度(切底 深度)高于和低于溜槽 底板的区间
切深控制
溜槽 例如: 切深最大区间=100mm 尾滚筒高度限制在: 溜槽底板以上100mm 溜槽底板以下100mm
切底深度是尾滚筒底缘至溜槽底板的距离 只适用于等高定差模式
Pan Control
Program Difference
等高定差模式 要求采高 滚筒直径 等高定差值
等高定差值=要求采高-滚筒直径
Program Difference
开始 区段 方向 支架 停止 模式
左摇臂 基准
高度差
等高定差模式 右摇臂 模式 基准 高度差
第一区段存储的 高度
高度基准:
用前区段做为滚筒定位的基准.
左摇臂 模式
MAN MAN PDIF MAN Mode
Left Boom
右摇臂
Offset
区段 方向 开始 停止
基准 高度差
1L -1000
REF
模式
PDIF MAN PDIF MAN
Mode
基准 高度差
-1000 1R +1000
REF
Offset
Step 1 1区段
Step 2 2区段
Step 3
过程表:<新> 右摇臂 模式 基准
插入过程表区段 点击“完成”, “插入”过程区段 点击“取消”退出
开始 结束 方向 左摇臂模式 左定差 右摇臂模式
返回
完成
取消
Save and Name a Table 创建过程表
区段
方向 支架 开始 停止 左摇臂 模式 基准 命名过程表 表2
过程表:<新> 右摇臂 模式 基准
记忆割煤
Angle Sensors
左角度传感器
角度传感器
俯仰/摇摆传感器
右角度传感器
煤机右侧比左侧高时, 摇摆角度为正
煤机工作面侧比采空区侧高时, 俯仰角度为正
Machine Position
煤机定位
传感器 D-齿轮传感器
复位开关
左D-齿轮传感器 (用于SIRSA和记 忆割煤的支架主计 数器)(先取样)
区段
方向 支架 开始 停止 左摇臂 模式 基准
过程表:<新> 右摇臂 模式 基准
插入过程表区段
输入左滚筒的等高 定差值. 即左右滚筒 中心的垂直距离.
最小 最大
开始 结束 方向 左摇臂模式
右摇臂模式
返回
下一项
取消
Creating a Sequence Table 创建过程表
区段
方向 支架 开始 停止 左摇臂 模式 基准
在“学习”割煤过程中,记忆割煤记录摇臂高度, 然后在每个过程“重复”割煤中, 重复同样的截割轮廓, 来适应开采厚度变化的煤层.
•PROGAM MODE •程序等高模式 Booms are positioned at a constant height specified by the sequence table.
支架号以煤机中心为基准.
开始/停止的支架号决定割煤的方向. 每个滚筒可设置成不同的记忆割煤模式.
过程区段是在一组支架中可编程的一段区域.
Gate Step
Support Step 1 2 3 4 Dir L G R G Start 100 25 25 80
端头区段
Right Boom
支架
Stop 25 5 80 100
• Each drum can be set up to perform a different memory cut mode
• The start/stop support numbers determine direction of the cut • Support numbers are referenced to the center of the shearer
TG Floor Offset - Displays the Tail Gate floor offset that was received from the Horizon Control System that coincides with the current machine position 机尾底板补偿 – 显示从水平线控制系统收到的当前机器位置的机尾底板补偿 Left Actual Height – Displays the Actual (or relative) height of the left boom 左实际高度 – 显示左摇臂的实际或相对高度
3rd Party Horizon Control Interface
STATUS SCREEN
Current Support – Displays the value of the left d-gear support count 当前支架 - 显示左d 齿轮的支架数值 Left Boom Mode – Displays the current mode of operation for the Left Boom 左摇臂模式 – 显示当前左摇臂的运作模式 Right Boom Mode - Displays the current mode of operation for the Right Boom 右摇臂模式 – 显示当前右摇臂的运作模式 HG Roof Offset – Displays the Head Gate Roof offset that was received from the Horizon Control System that coincides with the current machine position 机头顶板补偿 – 显示从水平线控制系统收到的当前机器位置的机头顶板补偿 HG Floor Offset - Displays the Head Gate floor offset that was received from the Horizon Control System that coincides with the current machine position 机头底板补偿 – 显示从水平线控制系统收到的当前机器位置的机头底板补偿