机械动力学第二章作业(答案)
2机械控制工程基础第二章答案

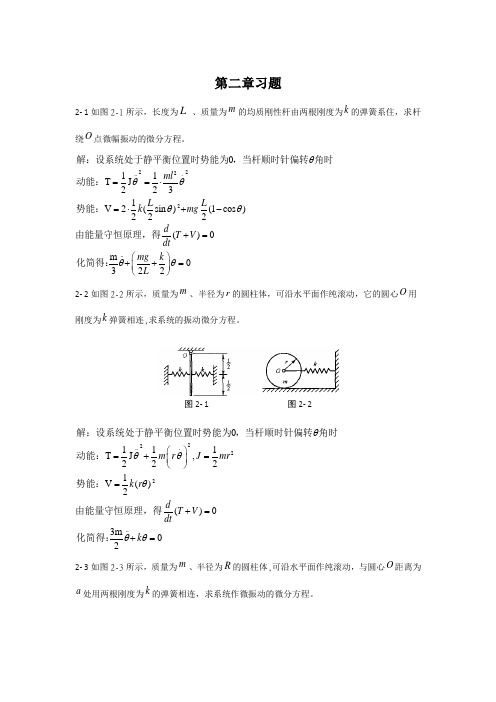
习 题2.1 什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++&&& (2) x tx x xiooo222=++&&& (3) x x x x io222oo=++&&& (4) x tx x x xiooo222o=++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 即xc x c c x m i&&&&121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k x c iioo121)(+=++&&2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++&&&&&&&(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有2.4 求图(题2.4)所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
机械动力学-第二章

J (q)φ2 M an
J (q)φ2 M an
I6
令
J J A Jo
I5
I4
I3
J A 传动系统的等效转动惯量 J o 上部负荷的等效转动惯量
I2
I4 I5 J A I 2 I 3 I i I i I 2 I 3 2 2 2 3.26 Kg m 2 i24 i24 i45
φ2 1 φ r r i 3 2 32 32 φ4 r2 r34 r4 r32 i42 y5 r2 r34 r32 s
由J (q )可看出
I 2φ22 I 3φ32 I 4φ42 m5 y2 s5
2 2 J (q) I 2 I 3i32 I 4i42 m5 (r2 r34 r32 )2
* J ( q )与传动比ik 2的平方成正比,与正负号无关; * 对J ( q )影响最大的是转速最快的轴的转动惯量;其余各轴影响小; * 可用转速最高轴(第一级)上的转动惯量近似估计(乘以系数1.1 ~ 1.2 )。
刚性机器运动方程 J (q)q 1 J (q) q 2 U Q* Qan 2
I2
各运动件位移与广义坐标的关系
r2 r34 ys 5 φ2 l r32
各运动件位移与广义坐标的关系 r2 φ3 φ2 r32
5 i 2
r2 r34 φ4 φ2 r4 r32
2 2
r2 r34 ys 5 φ2 l r32
2
广义质量J (q) [mi ( x y ) I si φi ] si si
d L dJ (q) ( ) q J (q)q J (q) q 2 J (q)q dt q dt
机械系统动力学第二章 机械系统运动微分方程的建立

式中:
第二章 机械系统运动微分方程的建立
为第i个质点的质量,
为第i质点到转动中心c的距离。
三、基本动力元件与特性 1、质量和转动惯量 构件的质量是构件惯性的一种度量,可用符号m表示,
2-3 机械系统运动微分方程的建立 2-3-2 单自由度系统 单自由度多刚体系统 4.根据质点系动能定理
dT W
系统的动能:
T T1 T2 T3 1 1 1 1 2 2 2 2 J A1 ( J 22 m2vC 2 ) m3vC 3 2 2 2 2 1 v v 1 2 2 [ J A J 2 ( 2 ) 2 m2 ( C 2 ) 2 m3 ( C 3 )]1 J e1 2 1 1 1 2
2-3 机械系统运动微分方程的建立 2-3-2 单自由度系统 单自由度多刚体系统 等效模型的物理意义参见图2-17 用等效模型表示的系 统运动微分方程
d 1 2 ( J e1 ) M e1 dt 2
即等效转动惯量 等效力矩:
j 2 vcj 2 J e [ J j ( ) mi ( ) ] j 1 1 1
me [ J j (
j 1
n
j
vc3
) mj (
2
vcj vc3
p
)2 ]
Fe M j
j 1
m
j
vc3
Fj
j 1
vj vc3
2-3 机械系统运动微分方程的建立 2-3-2多自由度系统 多自由度系统的运动微分方程的建立,相对复杂,其结 果常用矩阵形式表示比较方便。常用的方法主要有刚度 法、柔度法和Lagrange方程法。前两者基于振动系统 的影响系数,只适合应用于线性系统,后者则基于系统 的能量,既可应用于线性系统,也可应用于非线性系统。 1.刚度法 刚度法引入系统刚度系数的概念,利用达朗贝尔原理和 叠加原理,根据每个质点的动力平衡条件建立其动力平 衡方程。
第二章课后习题答案

第二章课后习题答案第二章牛顿定律2-1如图(a)所示,质量为m的物体用平行于斜面的细线联结置于光滑的斜面上,若斜面向左方作加速运动,当物体刚脱离斜面时,它的加速度的大小为()(A)ginθ(B)gcoθ(C)gtanθ(D)gcotθ分析与解当物体离开斜面瞬间,斜面对物体的支持力消失为零,物体在绳子拉力FT(其方向仍可认为平行于斜面)和重力作用下产生平行水平面向左的加速度a,如图(b)所示,由其可解得合外力为mgcotθ,故选(D).求解的关键是正确分析物体刚离开斜面瞬间的物体受力情况和状态特征.2-2用水平力FN把一个物体压着靠在粗糙的竖直墙面上保持静止.当FN逐渐增大时,物体所受的静摩擦力Ff的大小()(A)不为零,但保持不变(B)随FN成正比地增大(C)开始随FN增大,达到某一最大值后,就保持不变(D)无法确定分析与解与滑动摩擦力不同的是,静摩擦力可在零与最大值μFN范围内取值.当FN增加时,静摩擦力可取的最大值成正比增加,但具体大小则取决于被作用物体的运动状态.由题意知,物体一直保持静止状态,故静摩擦力与重力大小相等,方向相反,并保持不变,故选(A).2-3一段路面水平的公路,转弯处轨道半径为R,汽车轮胎与路面间的摩擦因数为μ,要使汽车不至于发生侧向打滑,汽车在该处的行驶速率()μgR(B)必须等于μgR(C)不得大于μgR(D)还应由汽车的质量m决定(A)不得小于分析与解由题意知,汽车应在水平面内作匀速率圆周运动,为保证汽车转弯时不侧向打滑,所需向心力只能由路面与轮胎间的静摩擦力提供,能够提供的最大向心力应为μFN.由此可算得汽车转弯的最大速率应为v=μRg.因此只要汽车转弯时的实际速率不大于此值,均能保证不侧向打滑.应选(C).2-4一物体沿固定圆弧形光滑轨道由静止下滑,在下滑过程中,则()(A)它的加速度方向永远指向圆心,其速率保持不变(B)它受到的轨道的作用力的大小不断增加(C)它受到的合外力大小变化,方向永远指向圆心(D)它受到的合外力大小不变,其速率不断增加分析与解由图可知,物体在下滑过程中受到大小和方向不变的重力以及时刻指向圆轨道中心的轨道支持力FN作用,其合外力方向并非指向圆心,其大小和方向均与物体所在位置有关.重力的切向分量(mgcoθ)使物体的速率将会不断增加(由机械能守恒亦可判断),则物体作圆周运动的向心力(又称法向力)将不断增大,由轨道法向方向上的动力学方程v2FNmginθm可判断,随θ角的不断增大过程,轨道支持力FN也将不R断增大,由此可见应选(B).2-5图(a)示系统置于以a=1/4g的加速度上升的升降机内,A、B两物体质量相同均为m,A所在的桌面是水平的,绳子和定滑轮质量均不计,若忽略滑轮轴上和桌面上的摩擦,并不计空气阻力,则绳中张力为()(A)58mg(B)12mg(C)mg(D)2mg分析与解本题可考虑对A、B两物体加上惯性力后,以电梯这个非惯性参考系进行求解.此时A、B两物体受力情况如图(b)所示,图中a′为A、B两物体相对电梯的加速度,ma′为惯性力.对A、B两物体应用牛顿第二定律,可解得FT=5/8mg.故选(A).讨论对于习题2-5这种类型的物理问题,往往从非惯性参考系(本题为电梯)观察到的运动图像较为明确,但由于牛顿定律只适用于惯性参考系,故从非惯性参考系求解力学问题时,必须对物体加上一个虚拟的惯性力.如以地面为惯性参考系求解,则两物体的加速度aA和aB均应对地而言,本题中aA和aB的大小与方向均不相同.其中aA应斜向上.对aA、aB、a和a′之间还要用到相对运动规律,求解过程较繁.有兴趣的读者不妨自己尝试一下.2-6图示一斜面,倾角为α,底边AB长为l=2.1m,质量为m的物体从题2-6图斜面顶端由静止开始向下滑动,斜面的摩擦因数为μ=0.14.试问,当α为何值时,物体在斜面上下滑的时间最短?其数值为多少?解取沿斜面为坐标轴O某,原点O位于斜面顶点,则由牛顿第二定律有mginαmgμcoαma(1)又物体在斜面上作匀变速直线运动,故有l11at2ginαμcoαt2coα22则t2l(2)gcoαinαμcoα为使下滑的时间最短,可令dt0,由式(2)有dαinαinαμcoαcoαcoαμinα0则可得tan2α1o,49μ此时t2l0.99gcoαinαμcoα2-7工地上有一吊车,将甲、乙两块混凝土预制板吊起送至高空.甲块质量为m1=2.00某102kg,乙块质量为m2=1.00某102kg.设吊车、框架和钢丝绳的质量不计.试求下述两种情况下,钢丝绳所受的张力以及乙块对甲块的作用力:(1)两物块以10.0m·s-2的加速度上升;(2)两物块以1.0m·s-2的加速度上升.从本题的结果,你能体会到起吊重物时必须缓慢加速的道理吗?解按题意,可分别取吊车(含甲、乙)和乙作为隔离体,画示力图,并取竖直向上为Oy轴正方向(如图所示).当框架以加速度a上升时,有FT-(m1+m2)g=(m1+m2)a(1)FN2-m2g=m2a(2)解上述方程,得FT=(m1+m2)(g+a)(3)FN2=m2(g+a)(4)(1)当整个装置以加速度a=10m·s-2上升时,由式(3)可得绳所受张力的值为FT=5.94某103N乙对甲的作用力为F′N2=-FN2=-m2(g+a)=-1.98某103N(2)当整个装置以加速度a=1m·s-2上升时,得绳张力的值为FT=3.24某103N此时,乙对甲的作用力则为F′N2=-1.08某103N由上述计算可见,在起吊相同重量的物体时,由于起吊加速度不同,绳中所受张力也不同,加速度大,绳中张力也大.因此,起吊重物时必须缓慢加速,以确保起吊过程的安全.2-8如图(a)所示,已知两物体A、B的质量均为m=3.0kg物体A以加速度a=1.0m·s-2运动,求物体B与桌面间的摩擦力.(滑轮与连接绳的质量不计)分析该题为连接体问题,同样可用隔离体法求解.分析时应注意到绳中张力大小处处相等是有条件的,即必须在绳的质量和伸长可忽略、滑轮与绳之间的摩擦不计的前提下成立.同时也要注意到张力方向是不同的.解分别对物体和滑轮作受力分析[图(b)].由牛顿定律分别对物体A、B及滑轮列动力学方程,有mAg-FT=mAa(1)F′T1-Ff=mBa′(2)F′T-2FT1=0(3)考虑到mA=mB=m,FT=F′T,FT1=F′T1,a′=2a,可联立解得物体与桌面的摩擦力Ffmgm4ma7.2N2讨论动力学问题的一般解题步骤可分为:(1)分析题意,确定研究对象,分析受力,选定坐标;(2)根据物理的定理和定律列出原始方程组;(3)解方程组,得出文字结果;(4)核对量纲,再代入数据,计算出结果来.2-9质量为m′的长平板A以速度v′在光滑平面上作直线运动,现将质量为m的木块B轻轻平稳地放在长平板上,板与木块之间的动摩擦因数为μ,求木块在长平板上滑行多远才能与板取得共同速度?分析当木块B平稳地轻轻放至运动着的平板A上时,木块的初速度可视为零,由于它与平板之间速度的差异而存在滑动摩擦力,该力将改变它们的运动状态.根据牛顿定律可得到它们各自相对地面的加速度.换以平板为参考系来分析,此时,木块以初速度-v′(与平板运动速率大小相等、方向相反)作匀减速运动,其加速度为相对加速度,按运动学公式即可解得.该题也可应用第三章所讲述的系统的动能定理来解.将平板与木块作为系统,该系统的动能由平板原有的动能变为木块和平板一起运动的动能,而它们的共同速度可根据动量定理求得.又因为系统内只有摩擦力作功,根据系统的动能定理,摩擦力的功应等于系统动能的增量.木块相对平板移动的距离即可求出.解1以地面为参考系,在摩擦力Ff=μmg的作用下,根据牛顿定律分别对木块、平板列出动力学方程Ff=μmg=ma1F′f=-Ff=m′a2a1和a2分别是木块和木板相对地面参考系的加速度.若以木板为参考系,木块相对平板的加速度a=a1+a2,木块相对平板以初速度-v′作匀减速运动直至最终停止.由运动学规律有-v′2=2a由上述各式可得木块相对于平板所移动的距离为mv22μgmm解2以木块和平板为系统,它们之间一对摩擦力作的总功为W=Ff(+l)-Ffl=μmg式中l为平板相对地面移动的距离.由于系统在水平方向上不受外力,当木块放至平板上时,根据动量守恒定律,有m′v′=(m′+m)v″由系统的动能定理,有μmg由上述各式可得11mv2mmv222mv22μgmm2-10如图(a)所示,在一只半径为R的半球形碗内,有一粒质量为m的小钢球,当小球以角速度ω在水平面内沿碗内壁作匀速圆周运动时,它距碗底有多高?分析维持钢球在水平面内作匀角速度转动时,必须使钢球受到一与向心加速度相对应的力(向心力),而该力是由碗内壁对球的支持力FN的分力来提供的,由于支持力FN始终垂直于碗内壁,所以支持力的大小和方向是随ω而变的.取图示O某y坐标,列出动力学方程,即可求解钢球距碗底的高度.解取钢球为隔离体,其受力分析如图(b)所示.在图示坐标中列动力学方程FNinθmanmRω2inθ(1)Rh(3)且有coθR由上述各式可解得钢球距碗底的高度为hR可见,h随ω的变化而变化.gω22-11火车转弯时需要较大的向心力,如果两条铁轨都在同一水平面内(内轨、外轨等高),这个向心力只能由外轨提供,也就是说外轨会受到车轮对它很大的向外侧压力,这是很危险的.因此,对应于火车的速率及转弯处的曲率半径,必须使外轨适当地高出内轨,称为外轨超高.现有一质量为m的火车,以速率v沿半径为R的圆弧轨道转弯,已知路面倾角为θ,试求:(1)在此条件下,火车速率v0为多大时,才能使车轮对铁轨内外轨的侧压力均为零?(2)如果火车的速率v≠v0,则车轮对铁轨的侧压力为多少?分析如题所述,外轨超高的目的欲使火车转弯的所需向心力仅由轨道支持力的水平分量FNinθ提供(式中θ角为路面倾角).从而不会对内外轨产生挤压.与其对应的是火车转弯时必须以规定的速率v0行驶.当火车行驶速率v≠v0时,则会产生两种情况:如图所示,如v>v0时,外轨将会对车轮产生斜向内的侧压力F1,以补偿原向心力的不足,如v<v0时,则内轨对车轮产生斜向外的侧压力F2,以抵消多余的向心力,无论哪种情况火车都将对外轨或内轨产生挤压.由此可知,铁路部门为什么会在每个铁轨的转弯处规定时速,从而确保行车安全.解(1)以火车为研究对象,建立如图所示坐标系.据分析,由牛顿定律有v2FNinθm(1)解(1)(2)两式可得火车转弯时规定速率为v0gRtanθ(2)当v>v0时,根据分析有v2FNinθF1coθm(3)RFNcoθF1inθmg0(4)解(3)(4)两式,可得外轨侧压力为v2F1mcoθginθR当v<v0时,根据分析有v2FNinθF2coθm(5)RFNcoθF2inθmg0(6)解(5)(6)两式,可得内轨侧压力为v2F2mginθcoθR2-12一杂技演员在圆筒形建筑物内表演飞车走壁.设演员和摩托车的总质量为m,圆筒半径为R,演员骑摩托车在直壁上以速率v作匀速圆周螺旋运动,每绕一周上升距离为h,如图所示.求壁对演员和摩托车的作用力.分析杂技演员(连同摩托车)的运动可以看成一个水平面内的匀速率圆周运动和一个竖直向上匀速直线运动的叠加.其旋转一周所形成的旋线轨迹展开后,相当于如图(b)所示的斜面.把演员的运动速度分解为图示的v1和v2两个分量,显然v1是竖直向上作匀速直线运动的分速度,而v2则是绕圆筒壁作水平圆周运动的分速度,其中向心力由筒壁对演员的支持力FN的水平分量FN2提供,而竖直分量FN1则与重力相平衡.如图(c)所示,其中φ角为摩托车与筒壁所夹角.运用牛顿定律即可求得筒壁支持力的大小和方向解设杂技演员连同摩托车整体为研究对象,据(b)(c)两图应有FN1mg0(1)FN2v2m(2)Rv2vcoθv2πR2πR2h2(3)22FNFN1FN2(4)以式(3)代入式(2),得FN2m4π2R2v24π2Rmv222(5)2222R4πRh4πRh将式(1)和式(5)代入式(4),可求出圆筒壁对杂技演员的作用力(即支承力)大小为22FNFN1FN224π2Rv22mg4π2R2h2与壁的夹角φ为FN24π2Rv2arctanarctan222FN14πRhg讨论表演飞车走壁时,演员必须控制好运动速度,行车路线以及摩托车的方位,以确保三者之间满足解题用到的各个力学规律.2-13一质点沿某轴运动,其受力如图所示,设t=0时,v0=5m·s-1,某0=2m,质点质量m=1kg,试求该质点7s末的速度和位置坐标.分析首先应由题图求得两个时间段的F(t)函数,进而求得相应的加速度函数,运用积分方法求解题目所问,积分时应注意积分上下限的取值应与两时间段相应的时刻相对应.解由题图得0t52t,Ft5t7355t,由牛顿定律可得两时间段质点的加速度分别为a2t,0t5a355t,5t7对0<t<5s时间段,由adv得dtvtv00dvadt积分后得v5t再由v2d某得dtd某vdt某00某t积分后得某25tt将t=5s代入,得v5=30m·s-1和某5=68.7m对5s<t<7s时间段,用同样方法有133dvv0vt5a2dt得v35t2.5t82.5t再由得某=17.5t2-0.83t3-82.5t+147.87将t=7s代入分别得v7=40m·s-1和某7=142m2-14一质量为10kg的质点在力F的作用下沿某轴作直线运动,已知F =120t+40,式中F的单位为N,t的单位的s.在t=0时,质点位于某=5.0m处,其速度v0=6.0m·s-1.求质点在任意时刻的速度和位置.分析这是在变力作用下的动力学问题.由于力是时间的函数,而加速度a=dv/dt,这时,动力学方程就成为速度对时间的一阶微分方程,解此微分方程可得质点的速度v(t);由速度的定义v=d某/dt,用积分的方法可求出质点的位置.解因加速度a=dv/dt,在直线运动中,根据牛顿运动定律有2某某5d某vdt5t120t40mdvdt依据质点运动的初始条件,即t0=0时v0=6.0m·s-1,运用分离变量法对上式积分,得vv0dv12.0t4.0dt0tv=6.0+4.0t+6.0t2又因v=d某/dt,并由质点运动的初始条件:t0=0时某0=5.0m,对上式分离变量后积分,有d某6.04.0t6.0tdt某t2某00某=5.0+6.0t+2.0t2+2.0t32-15轻型飞机连同驾驶员总质量为1.0某103kg.飞机以55.0m·s-1的速率在水平跑道上着陆后,驾驶员开始制动,若阻力与时间成正比,比例系数α=5.0某102N·s-1,空气对飞机升力不计,求:(1)10s后飞机的速率;(2)飞机着陆后10s内滑行的距离.分析飞机连同驾驶员在水平跑道上运动可视为质点作直线运动.其水平方向所受制动力F为变力,且是时间的函数.在求速率和距离时,可根据动力学方程和运动学规律,采用分离变量法求解.解以地面飞机滑行方向为坐标正方向,由牛顿运动定律及初始条件,有dvαtdtvtαtdvv00mdtα2t得vv02mFmam因此,飞机着陆10s后的速率为v=30m·s-1又tα2d某vdt某0002mt某故飞机着陆后10s内所滑行的距离某某0v0tα3t467m6m2-16质量为m的跳水运动员,从10.0m高台上由静止跳下落入水中.高台距水面距离为h.把跳水运动员视为质点,并略去空气阻力.运动员入水后垂直下沉,水对其阻力为bv2,其中b为一常量.若以水面上一点为坐标原点O,竖直向下为Oy轴,求:(1)运动员在水中的速率v与y的函数关系;(2)如b/m=0.40m-1,跳水运动员在水中下沉多少距离才能使其速率v减少到落水速率v0的1/10?(假定跳水运动员在水中的浮力与所受的重力大小恰好相等)分析该题可以分为两个过程,入水前是自由落体运动,入水后,物体受重力P、浮力F和水的阻力Ff的作用,其合力是一变力,因此,物体作变加速运动.虽然物体的受力分析比较简单,但是,由于变力是速度的函数(在有些问题中变力是时间、位置的函数),对这类问题列出动力学方程并不复杂,但要从它计算出物体运动的位置和速度就比较困难了.通常需要采用积分的方法去解所列出的微分方程.这也成了解题过程中的难点.在解方程的过程中,特别需要注意到积分变量的统一和初始条件的确定.解(1)运动员入水前可视为自由落体运动,故入水时的速度为v02gh运动员入水后,由牛顿定律得P-Ff-F=ma由题意P=F、Ff=bv2,而a=dv/dt=v(dv/dy),代入上式后得-bv2=mv(dv/dy)考虑到初始条件y0=0时,v0t2gh,对上式积分,有vdvmdy0v0vbvv0eby/m2gheby/m(2)将已知条件b/m=0.4m-1,v=0.1v0代入上式,则得ymvln5.76mbv0某2-17直升飞机的螺旋桨由两个对称的叶片组成.每一叶片的质量m=136kg,长l=3.66m.求当它的转速n=320r/min 时,两个叶片根部的张力.(设叶片是宽度一定、厚度均匀的薄片)分析螺旋桨旋转时,叶片上各点的加速度不同,在其各部分两侧的张力也不同;由于叶片的质量是连续分布的,在求叶片根部的张力时,可选取叶片上一小段,分析其受力,列出动力学方程,然后采用积分的方法求解.解设叶片根部为原点O,沿叶片背离原点O的方向为正向,距原点O为r处的长为dr一小段叶片,其两侧对它的拉力分别为FT(r)与FT(r+dr).叶片转动时,该小段叶片作圆周运动,由牛顿定律有dFTFTrFTrdr由于r=l时外侧FT=0,所以有m2ωrdrltFTrdFTlrmω2rdrlmω2222πmn222FTrlrlr2ll上式中取r=0,即得叶片根部的张力FT0=-2.79某105N负号表示张力方向与坐标方向相反.2-18一质量为m的小球最初位于如图(a)所示的A点,然后沿半径为r 的光滑圆轨道ADCB下滑.试求小球到达点C时的角速度和对圆轨道的作用力.分析该题可由牛顿第二定律求解.在取自然坐标的情况下,沿圆弧方向的加速度就是切向加速度at,与其相对应的外力Ft是重力的切向分量mginα,而与法向加速度an相对应的外力是支持力FN和重力的法向分量mgcoα.由此,可分别列出切向和法向的动力学方程Ft=mdv/dt和Fn=man.由于小球在滑动过程中加速度不是恒定的,因此,需应用积分求解,为使运算简便,可转换积分变量.倡该题也能应用以小球、圆弧与地球为系统的机械能守恒定律求解小球的速度和角速度,方法比较简便.但它不能直接给出小球与圆弧表面之间的作用力.解小球在运动过程中受到重力P和圆轨道对它的支持力FN.取图(b)所示的自然坐标系,由牛顿定律得Ftmginαmdv(1)dtmv2FnFNmgcoαm(2)R由vdrdαrdα,得dt,代入式(1),并根据小球从点A运动到点Cdtdtv的始末条件,进行积分,有vv0vdvα90orginαdα得v则小球在点C的角速度为2rgcoαωv2gcoα/rrmv2mgcoα3mgcoα由式(2)得FNmr由此可得小球对圆轨道的作用力为FN3mgcoαFN负号表示F′N与en反向.2-19光滑的水平桌面上放置一半径为R的固定圆环,物体紧贴环的内侧作圆周运动,其摩擦因数为μ,开始时物体的速率为v0,求:(1)t时刻物体的速率;(2)当物体速率从v0减少到12v0时,物体所经历的时间及经过的路程.解(1)设物体质量为m,取图中所示的自然坐标,按牛顿定律,有mv2FNmanRFfmatdvdt由分析中可知,摩擦力的大小Ff=μFN,由上述各式可得v2dvμRdt取初始条件t=0时v=v0,并对上式进行积分,有t0dtRvdvμv0v2vRv0Rv0μt(2)当物体的速率从v0减少到1/2v0时,由上式可得所需的时间为t物体在这段时间内所经过的路程Rμv0vdt0tt0Rv0dtRv0μtRln2μ2-20质量为45.0kg的物体,由地面以初速60.0m·s-1竖直向上发射,物体受到空气的阻力为Fr=kv,且k=0.03N/(m·s-1).(1)求物体发射到最大高度所需的时间.(2)最大高度为多少?分析物体在发射过程中,同时受到重力和空气阻力的作用,其合力是速率v的一次函数,动力学方程是速率的一阶微分方程,求解时,只需采用分离变量的数学方法即可.但是,在求解高度时,则必须将时间变量通过速度定义式转换为位置变量后求解,并注意到物体上升至最大高度时,速率应为零.解(1)物体在空中受重力mg和空气阻力Fr=kv作用而减速.由牛顿定律得mgkvmdv(1)dt某2-25如图(a)所示,电梯相对地面以加速度a竖直向上运动.电梯中有一滑轮固定在电梯顶部,滑轮两侧用轻绳悬挂着质量分别为m1和m2的物体A和B.设滑轮的质量和滑轮与绳索间的摩擦均略去不计.已知m1>m2,如以加速运动的电梯为参考系,求物体相对地面的加速度和绳的张力.分析如以加速运动的电梯为参考系,则为非惯性系.在非惯性系中应用牛顿定律时必须引入惯性力.在通常受力分析的基础上,加以惯性力后,即可列出牛顿运动方程来.解取如图(b)所示的坐标,以电梯为参考系,分别对物体A、B作受力分析,其中F1=m1a,F2=m2a分别为作用在物体A、B上的惯性力.设ar为物体相对电梯的加速度,根据牛顿定律有m1gm1aFT1m1ar(1)m2gm2aFT2m2ar(2)FT2FT2(3)由上述各式可得arm1m2gam1m22m1m2gam1m2FT2FT2由相对加速度的矢量关系,可得物体A、B对地面的加速度值为a1aram1m2g2m2am1m22m1am1m2gm1m2a2araa2的方向向上,a1的方向由ar和a的大小决定.当ar<a,即m1g-m2g-2m2a>0时,a1的方向向下;反之,a1的方向向上.某2-26如图(a)所示,在光滑水平面上,放一质量为m′的三棱柱A,它的斜面的倾角为α.现把一质量为m的滑块B放在三棱柱的光滑斜面上.试求:(1)三棱柱相对于地面的加速度;(2)滑块相对于地面的加速度;(3)滑块与三棱柱之间的正压力.分析这类问题可应用牛顿定律并采用隔离体法求解.在解题的过程中必须注意:(1)参考系的选择.由于牛顿定律只适用于惯性系,可选择地面为参考系(惯性系).因地面和斜面都是光滑的,当滑块在斜面上下滑时,三棱柱受到滑块对它的作用,也将沿地面作加速度为aA的运动,这时,滑块沿斜面的加速度aBA,不再是它相对于地面的加速度aB了.必须注意到它们之间应满足相对加速度的矢量关系,即aB=aA+aBA.若以斜面为参考系(非惯性系),用它求解这类含有相对运动的力学问题是较为方便的.但在非惯性系中,若仍要应用牛顿定律,则必须增添一惯性力F,且有F=maA.(2)坐标系的选择.常取平面直角坐标,并使其中一坐标轴方向与运动方向一致,这样,可使解题简化.(3)在分析滑块与三棱柱之间的正压力时,要考虑运动状态的影响,切勿简单地把它视为滑块重力在垂直于斜面方向的分力mgcoα,事实上只有当aA=0时,正压力才等于mgcoα.解1取地面为参考系,以滑块B和三棱柱A为研究对象,分别作示力图,如图(b)所示.B受重力P1、A施加的支持力FN1;A受重力P2、B施加的压力FN1′、地面支持力FN2.A的运动方向为O某轴的正向,Oy轴的正向垂直地面向上.设aA为A对地的加速度,aB为B对的地加速度.由牛顿定律得FN1inαmaA(1)FN1inαmaB某(2)FN1coαmgmaBy(3)FN1FN1(4)设B相对A的加速度为aBA,则由题意aB、aBA、aA三者的矢量关系如图(c)所示.据此可得aB某aAaBAcoα(5)aByaBAinα(6)解上述方程组可得三棱柱对地面的加速度为aAmginαcoα2mminαmginαcoαmmin2α滑块相对地面的加速度aB在某、y轴上的分量分别为aB某aBymmgin2αmmin2α则滑块相对地面的加速度aB的大小为aBaa2B某2Bym22mmm2in2αginαmmin2α其方向与y轴负向的夹角为amcotαθarctanB某arctanaBymmA与B之间的正压力FN1mmgcoα2mminα解2若以A为参考系,O某轴沿斜面方向[图(d)].在非惯性系中运用牛顿定律,则滑块B的动力学方程分别为mginαmaAcoαmaBA(1)mgcoαFN1maAinα0(2)又因FN1inαmaA0(3)FN1FN1(4)由以上各式可解得aAaBAmginαcoαmmin2αmmginαmmin2α由aB、aBA、aA三者的矢量关系可得m22mmm2in2αaBginαmmin2α以aA代入式(3)可得FN1mmgcoαmmin2α。
机械工程学第四版课后练习题含答案

机械工程学第四版课后练习题含答案机械工程学是机械工程中的重要基础课程,是机械工程师必须要掌握的知识。
本文介绍的是机械工程学第四版课后练习题,包含了部分答案,希望能够帮助大家更好地掌握这门课程。
第一章绪论1.1 机械工程学基本定义问题1.机械工程学的基本定义是什么?机械工程学是一门研究材料、能量、力学及运动、力的传递、机械结构和机械系统设计、制造、控制及维护等问题的科学、技术与艺术。
1.2 认识材料1.说一下弹性和塑性的区别。
弹性是指当外力作用于物体时,物体会发生一定程度的形变,但随着外力的消失,物体能够完全恢复到原来的形态,称为弹性。
塑性是指当外力作用于物体时,物体会发生一定程度的形变,即物体的形状发生改变,但在外力消失后,物体不会完全恢复到原来的形态,称为塑性。
1.3 认识力的大小问题1.什么是力的大小?力的大小是指是一种物理量,表示力的强度大小的大小。
力的大小通常用牛(N)作为单位。
第二章静力学2.1 质点和刚体1.质点和刚体的区别是什么?质点是没有大小的点,只有质量,并且不受形变的物体,被认为是地球表面一个点处质量的重心,在计算力学问题时可以忽略它的长度和宽度。
刚体是一个固定形状的物体,它的每个点都不能发生相对位置的变化,即不受形变的物体。
2.2 力的合成1.什么是力的合成?力的合成是指将两个或多个力的作用效果替换为一个力的作用效果的运算过程。
2.3 平衡条件1.什么是平衡条件?当一个物体处于静止状态或匀速直线运动时,称为平衡状态,此时物体所受合外力为零。
平衡条件是物体处于平衡状态所需满足的条件,通常包括力的平衡条件和力矩的平衡条件。
第三章动力学3.1 力的概念1.什么是力?力是一种物理学概念,是指物体之间的相互作用,可以用来描述物体的运动状态和变形状态。
3.2 牛顿运动定律1.牛顿的第一运动定律是什么?牛顿的第一运动定律是说:一个物体如果受到合外力的作用为零,它将保持静止或匀速直线运动的状态。
结构动力学习题解答-2

====Word 行业资料分享--可编辑版本--双击可删====第一章 单自由度系统1.1 总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、 牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析,得到系统所受的合力;(2) 利用牛顿第二定律∑=F x m,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、 动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析和动量距分析;(2) 利用动量距定理J ∑=M θ,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、 拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程θθ∂∂-∂∂∂LL dt )( =0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、 能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const(2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
1.2 叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。
2机械控制工程基础第二章答案
习 题什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++&&& (2) x tx x xiooo222=++&&& (3) x x x x io222oo=++&&& (4) x tx x x xiooo222o=++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
图(题)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题 解: (1)对图(a)所示系统,由牛顿定律有 即xc x c c x m i&&&&121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k x c iioo121)(+=++&&求出图(题所示电系统的微分方程。
图(题)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++&&&&&&&(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有求图(题所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
解:设系统输入为M (即),输出θ(即),分别对圆盘和质块进行动力学分析,列写动力学方程如下:消除中间变量x,即可得到系统动力学方程KM M c Mm C R c k KJ c C km R cJ mC mJ mmm++=++-++++&&&&&&&&&θθθθ)(22)()()4( 输出y(t)与输入x(t)的关系为y(t)= 2x(t)+x 3(t)。
机械控制工程基础第二章的答案及解析
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
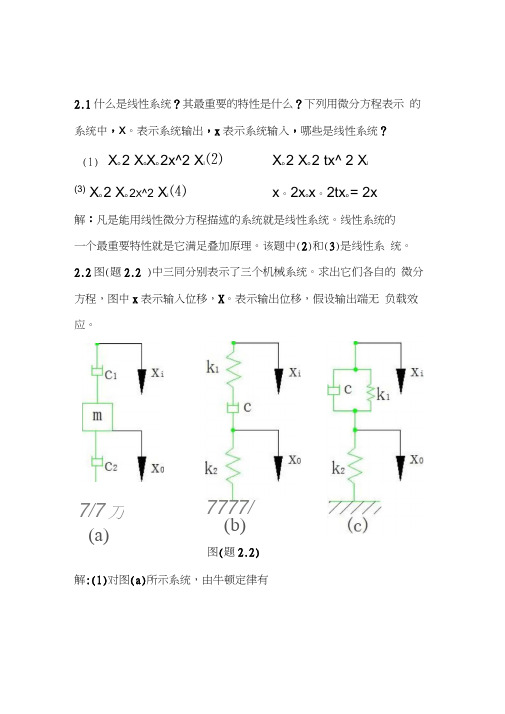
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
机械基础练习册答案第四版

机械基础练习册答案第四版第一章:机械工程概述1. 机械工程的定义是什么?答:机械工程是一门应用物理和材料科学原理来设计、分析、制造和维护机械系统的学科。
2. 机械工程的主要分支有哪些?答:机械工程的主要分支包括动力工程、制造工程、材料工程、控制工程和机械设计。
3. 机械工程在现代工业中的重要性是什么?答:机械工程是现代工业的基础,它涉及到产品的设计、制造和维护,对提高生产效率、降低成本和推动技术创新具有重要作用。
第二章:材料力学1. 什么是应力?答:应力是单位面积上受到的力,用来描述材料在受力时内部的分布状态。
2. 什么是应变?答:应变是材料在受力后发生的形变与原始尺寸的比值,用来描述材料的形变程度。
3. 弹性模量和屈服强度的区别是什么?答:弹性模量是材料在弹性变形阶段应力与应变的比值,反映材料的刚性;屈服强度是材料发生永久变形前能承受的最大应力,反映材料的强度。
第三章:机械设计基础1. 机械设计的基本步骤是什么?答:机械设计的基本步骤包括需求分析、概念设计、详细设计、原型制作、测试和评估。
2. 什么是功能要求和性能要求?答:功能要求是产品必须完成的任务或动作;性能要求是产品完成任务时必须达到的标准或水平。
3. 设计评审的目的是什么?答:设计评审的目的是确保设计满足所有技术、经济和环境要求,同时识别和解决潜在的设计问题。
第四章:机械制造工艺1. 机械加工的常见方法有哪些?答:常见的机械加工方法包括车削、铣削、钻削、磨削和刨削。
2. 什么是数控加工?答:数控加工是一种使用计算机程序控制机床运动和工具路径的加工方式,可以提高加工精度和生产效率。
3. 什么是铸造?答:铸造是一种金属成型工艺,通过将熔融金属倒入模具中,冷却后形成所需形状的零件。
第五章:机械系统的动力学分析1. 什么是动力学?答:动力学是研究力和运动之间关系的学科,它分析物体在受力作用下的运动状态。
2. 什么是静平衡和动平衡?答:静平衡是指物体在静止状态下,所有作用力相互平衡;动平衡是指物体在运动状态下,所有作用力和力矩相互平衡,使物体保持稳定运动。
机械动力学复习题答案
机械动力学复习题答案机械动力学复习题答案机械动力学是研究物体运动和力的学科,是机械工程中非常重要的一门课程。
它涉及到力、质点运动、刚体运动、动力学方程等内容。
在学习机械动力学时,我们经常会遇到一些复习题,下面是一些常见机械动力学复习题的答案,希望能对大家的学习有所帮助。
1. 什么是力?答:力是物体之间相互作用的结果,是一种物理量,用符号F表示,单位是牛顿(N)。
力可以改变物体的运动状态,包括速度、方向和形状等。
2. 什么是质点运动?答:质点运动是指将物体看作一个质点,忽略物体的形状和大小,只考虑物体的质量和位置的运动。
质点运动可以分为直线运动和曲线运动两种。
3. 什么是刚体运动?答:刚体运动是指物体保持形状不变的运动。
在刚体运动中,刚体的各个部分保持相对位置不变,刚体的形状和大小也不发生变化。
4. 什么是动力学方程?答:动力学方程描述了物体运动的规律。
它是牛顿第二定律的数学表达式,可以用来计算物体的加速度、速度和位移等物理量。
动力学方程的一般形式为F=ma,其中F是物体所受的合力,m是物体的质量,a是物体的加速度。
5. 什么是动量?答:动量是物体运动的量度,是物体质量和速度的乘积。
动量用符号p表示,单位是千克·米/秒(kg·m/s)。
动量的大小和方向都与物体的质量和速度有关。
6. 什么是冲量?答:冲量是力对物体作用的时间积分,是力对物体产生变化的量度。
冲量用符号J表示,单位是牛顿·秒(N·s)。
冲量的大小等于力的大小乘以作用时间的长度。
7. 什么是动能?答:动能是物体由于运动而具有的能量,是物体的质量和速度的平方的乘积的一半。
动能用符号K表示,单位是焦耳(J)。
动能的大小与物体的质量和速度的平方成正比。
8. 什么是功?答:功是力对物体做的功,是力在物体上产生的能量转化。
功用符号W表示,单位是焦耳(J)。
功的大小等于力的大小乘以物体移动的距离。
9. 什么是机械能?答:机械能是物体的动能和势能的总和。
机械动力学基础课后答案
机械动力学基础课后答案一、填空题(每空1分,共30分)1、构件就是机器的_运动___单元体;零件就是机器的__生产___单元体;部件就是机器的__加装___单元体。
2、平面运动副可分为______低副__和____高副___,低副又可分为__转动副_____和___移动副____。
3、轮系运动时,所有齿轮几何轴线都固定不动的,表示___定轴轮系____轮系,至少存有一个齿轮几何轴线不紧固的,表示___行星轮系______轮系。
4、为保证带传动的工作能力,一般规定小带轮的包角α≥___120°_______。
5、若键的标记为键B20×70GB-79,则该键为__B____平键,b=___20___,L=_____70___。
6、轴的作用是_____支承轴上的旋转零件________________________。
按轴的承载情况不同,可以分为___传递运动和转矩____、___心轴_____、__转轴、传动轴_______。
7、凸轮机构就是由_____机架_______、________凸轮____、______从动件______三个基本构件共同组成的。
8、在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的'运动特性称为___急回特性_________。
9、在蜗轮齿数维持不变的情况下,蜗杆的头数越太少,则传动比就越_______小_____。
10、齿轮啮合时,当主动齿轮的____齿根__推动从动齿轮的___齿顶___,一对轮齿开始进入啮合,所以开始啮合点应为______从动轮齿顶圆______与啮合线的交点;当主动齿轮的___齿顶___推动从动齿轮的___齿根___,两轮齿即将脱离啮合,所以终止啮合点为________主动轮齿顶圆____与啮合线的交点。
11、滚动轴承内圈与轴颈的协调使用____基孔新制__制,外圈与轴承孔的协调使用基轴制 _______制。
《机械动力学答案》
A、急停阶段 B、启动阶段 C、稳定运转阶段 D、停车阶段 72、在动力分析中,主要涉及的力是( ) 。 A、驱动力 B、重力 C、摩擦力 D、生产阻力 73、以下选项中,与等效力有关的是( ) 。 A、外力 B、传动比 C、ωj/v D、vk/v 74、以下选项中,与等效力矩有关的是( ) 。 A、外力据 B、传动比 C、ωj/ω D、vk/ω 75、以下选项中,可归为阻尼的有( ) 。 A、物体的内力 B、物体表面间的摩擦力 C、周围介质的阻力 D、材料的内摩擦 四、填空题(每空 2 分,共 30 空,共 60 分) 76、从惯性载荷被平衡的程度看,平衡可分为 、 和 。 77、机械动力学的分析方法按功能分类可分为 和 。 78、动力学的分析方法按水平分类,可分为 、 、 和 。 79、用质量再分配实现摆动力的完全平衡,其分析方法主要有 、 、 和 。 80、机械系统运转的全过程可分为 、 和 这几个阶段。 81、机器人动力学是机器人 、 和 的基础。 82、工业机器人通常由 、 、 和 组成。 83、二自由度系统的等效转动惯量是系统的 、 、 和 的函数。 84、实现摆动力完全平衡的方法有 、 和 。 76、部分平衡、完全平衡、优化综合平衡 77、动力学反问题、动力学正问题 78、静力分析、动态静力分析、动态分析、弹性动态分析 79、广义质量代换法、线性独立矢量法、质量矩替代法、有限位置法 80、启动阶段、稳定运转阶段、停车阶段 81、操作机设计、控制器设计、动态性能分析 82、执行机构、驱动装置、控制系统、传感系统 83、时间、惯性参数、几何参数、广义坐标 84、加配重、合理布置机构、设置附加机构 五、计算题(第 85、86 题各 30 分,第 87 题 10 分,第 88 题 20 分,共 90 分) 85、如图所示为一对心曲柄滑块机构。曲柄以转速度 ω1 作等速回转运动,曲柄与水平方 向夹角为 θ1 ,曲柄长度为 r ,质心与其回转中心 A 重合。连杆长度 l ,连杆与水平方向夹 角为 θ 2 ,连杆质心 S2 到铰链 B 的距离 BS 2 = L ,连杆质量 m 2 ,对其质心的转动惯量 J 2 。 滑 块质量 m3 ,其质心与铰链 C 重合。1)画出曲柄、连杆和滑块的受力分析图;2)写出曲 柄、连杆和滑块的平衡方程。
机械动力学作业
机械动力学作业1、机械动力学的研究内容机械动力学是一门基于Newton力学,研究机械系统宏观动态行为的学科。
该学科的研究对象包括几乎所有具有机械功能的系统,其研究范围涵盖了这类系统的建模与仿真、动力学分析与设计、动力学控制、运行状态监测和故障诊断等。
该学科的主要任务是采用尽可能低的代价使产品在设计、研制、运行各阶段具有最佳的动力学品质。
机械动力学是机械原理的主要组成部分。
它研究机械在运转过程中的受力、机械中各构件的质量与机械运动之间的相互关系,是现代机械设计的理论基础。
研究机械运转过程中能量的平衡和分配关系。
主要研究的是:在已知外力作用下,求具有确定惯性参量的机械系统的真实运动规律;分析机械运动过程中各构件之间的相互作用力;研究回转构件和机构平衡的理论和方法;机械振动的分析;以及机构的分析和综合等等。
研究内容概况6个方面:1、在已知外力作用下,求具有确定惯性参量的机械系统的真实运动规律;分析机械运动过程中各构件之间的相互作用力;研究回转构件和机构平衡的理论和方法;机械振动的分析;以及机构的分析和综合等等。
为了简化问题,常把机械系统看作具有理想、稳定约束的刚体系统处理。
对于单自由度的机械系统,用等效力和等效质量的概念,可以把刚体系统的动力学问题转化为单个刚体的动力学问题;对多自由度机械系统动力学问题一般用拉格朗日方程求解。
机械系统动力学方程常常是多参量非线性微分方程,只在特殊条件下可直接求解,一般情况下需要用数值方法迭代求解许多机械动力学问题可借助电子计算机分析计算机根据输入的外力参量、构件的惯性参量和机械系统的结构信息,自动列出相应的微分方程并解出所要求的运动参量。
2、分析机械运动过程中各构件之间的相互作用力。
这些力的大小和变化规律是设计运动副的结构、分析支承和构件的承载能力以及选择合理润滑方法的依据。
在求出机械真实运动规律后可算出各构件的惯性力,再依据达朗伯原理用静力学方法求出构件间的相互作用力。
机械动力学考试题与答案

平面机构惯性力完全平衡的线性独立向量法
代入式(11.1),得总质心S点的向量方程为
机构四边形的约束方程为
令rS表达式中与时间相关的项之系数为零,即
将式(11.6)中代入式(11.5),得rS为
式(11.10)表明,此时,总质心S为一个静止点,既没有速度也没有加速度,机构的惯性力之和为零。式(11.8)、式(11.9)为铰链四杆机构惯性力平衡的几何条件。
激励分为两大类:确定激励和随机激励。可以用时间的确定函数来描述的激励属于确定激励,如:脉冲函数,周期函数,简谐函数。不能用时间的确定函数来描述的激励为随机激励。确定激励产生的响应为确定响应,随机激励产生的响应为随机响应,只能用概率统计的方法描述。线性系统用线性微分方程来描述,非线性系统通过非线性微分方程来描述。非线性微分方程的求解比较复杂,忽略掉非线性因素将非线性系统简化为线性系统,是常见的做法,但是一些非线性现象如分叉和混沌,用简化了的线性方程式无法解释的,在机械弹性动力学中,有如下两种趋向并存,正确的忽略非线性因素,建立简化的线性模型,以求分析的简便性;计入必要的非线性因素,求解非线性方程,以求分析的精确性并揭示非线性现象。
机械动力学第二章作业(答案)
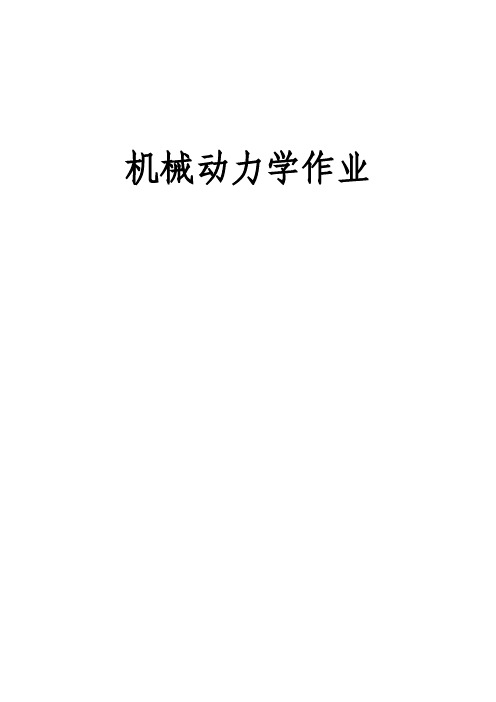
第二章习题2- 1如图2-1所示,长度为L 、质量为m 的均质刚性杆由两根刚度为k 的弹簧系住,求杆绕O 点微幅振动的微分方程。
222...2..011T J 2231V 2(sin )(1cos )222()0m 0322ml L Lk mg dT V dtmg k L θθθθθθθ==⋅=⋅+-+=⎛⎫++= ⎪⎝⎭解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 2如图2-2所示,质量为m 、半径为r 的圆柱体,可沿水平面作纯滚动,它的圆心O 用刚度为k 弹簧相连,求系统的振动微分方程。
22 (2)2..0111T J ,2221V ()2()03m 02m r J mr k r dT V dtk θθθθθθ⎛⎫=+= ⎪⎝⎭=+=+=解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 3如图2-3所示,质量为m 、半径为R 的圆柱体,可沿水平面作纯滚动,与圆心O 距离为a 处用两根刚度为k 的弹簧相连,求系统作微振动的微分方程。
图2- 1 图2- 22.222..220111T J ,2221V (2)[()]2()032()02m R J mR k R a dT V dt mR k R a θθθθθ⎛⎫=+= ⎪⎝⎭=⋅++=++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 4求图2-4所示弹簧-质量-滑轮系统的振动微分方程(假设滑轮与绳索间无滑动)。
2.222....0111T J ,2221V ()2()0()02m r J Mr k r dT V dt x r x r M m x kx θθθθθ⎛⎫=+= ⎪⎝⎭=⋅+===++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得其中,,化简得: 2- 5质量可忽略的刚性杆-质量-弹簧-阻尼器系统参数如图2-5所示,2L 杆处于铅垂位置时系统静平衡,求系统作微振动的微分方程。
机械系统动力学答案

5. 如何设计参数,使减振器效果最佳?
答:动力减振器视辅助质量与主质量联结方式不同分为:
ⅰ 有阻尼动力减振器(有弹性元件又有阻尼元件与主质量联结) ⅱ 无阻尼动力减振器(有弹性元件无阻尼元件与主质量联结) ⅲ 磨擦减振器(无弹性元件只有阻尼元件与主质量联结)
1)对无阻尼减振器(0ξ=)时:
()()22
1
222221st A u αλδλαλλα-=--- 当 ()21,0n A ωωαλ===即时只有减振器振动
(主系统实现减振)主系统共振危害大。
通常令21,1n n ωωα==即 以消除主系统的共振
2)对有阻尼动力减振器(0ξ≠);
不同值ξ,不同幅频曲线,无论ξ为何值,所有曲线过P 和Q 点。
令该两点分别对应的频率 : 12;P Q λλ⇒⇒ 要使振幅最大值尽可能小。
减振器在整个频率范围内都有好的减振效果。
即:
111max st st st P Q A A A δδδ⎛⎫⎛⎫⎛⎫== ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭
按这条件推导减振器最佳参数:22,,k u m αξ→→
a.
即1,st P Q A δ⎛⎫= ⎪⎝⎭ 12A u m ⇒−−
→−−→选定 b.由
11u α=
+ 得 22:k u m αα⇒⇒ c.由()23
3281P Q opt u
u ξξξ+==+ 得ξ
d.验算减振器弹性元件强度:由2A 验算减振器弹簧强度.
3) 对磨擦减振器
图中,无论阻尼比ξ为何值,各曲线都过Q 点(和P 点,0λ=处) 为使Q 点为最高点,求得最佳阻尼比:
opt
ξ=。
大学物理(机械工业出版社)第二章课后答案

第二章 质点动力学2-1一物体从一倾角为30︒的斜面底部以初速v 0=10m·s -1向斜面上方冲去,到最高点后又沿斜面滑下,当滑到底部时速率v =7m·s -1,求该物体与斜面间的摩擦系数。
解:物体与斜面间的摩擦力f =uN =umgcos30︒物体向斜面上方冲去又回到斜面底部的过程由动能定理得220112(1)22mv mv f s -=-⋅物体向斜面上方冲到最高点的过程由动能定理得2010sin 302mv f s mgh f s mgs -=-⋅-=-⋅-2(2)s ∴=把式(2)代入式(1)得,220.198u =2-2如本题图,一质量为m 的小球最初位于光滑圆形凹槽的A 点,然后沿圆弧ADCB 下滑,试求小球在C 点时的角速度和对圆弧表面的作用力,圆弧半径为r 。
解:小球在运动的过程中受到重力G 和轨道对它的支持力T.取如图所示的自然坐标系,由牛顿定律得22sin (1)cos (2)t n dv F mg mdtv F T mg m Rαα=-==-=由,,1ds rd rd v dt dt dt vαα===得代入式(), A 并根据小球从点运动到点C 始末条件进行积分有,习题2-2图902n (sin )m cos 3cos '3cos ,e v vdv rg d v v rv mg mg rmg αααωααα=-===+==-=-⎰⎰得则小球在点C 的角速度为=由式(2)得 T 由此可得小球对园轨道得作用力为T T 方向与反向2-3如本题图,一倾角为θ 的斜面置于光滑桌面上,斜面上放一质量为m 的木块,两者间摩擦系数为μ,为使木块相对斜面静止,求斜面的加速度a 应满足的条件。
解:如图所示()1212min max sin ,cos cos sin (1)sin cos 2(1)(2)(sin cos )(cos sin )(sin cos )()(cos sin )1(2)(1)(sin cos )(cos sin )(sin cos a a a a N mg ma ma mg uN m a ma u g u a u g u g tg u a u utg u g u a u g u a θθθθθθθθθθθθθθθθθθθθθ==∴-==±==⨯+-=+--∴==++-⨯+=-+∴=得,得,)()(cos sin )1()()11g tg u u utg g tg u g tg u a utg utg θθθθθθθθθ+=---+∴≤≤+- 2-4如本题图,A 、B 两物体质量均为m ,用质量不计的滑轮和细绳连接,并不计摩擦,则A 和B 的加速度大小各为多少 。
2机械控制工程基础第二章答案
习 题2.1 什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++ (2) x tx x xiooo222=++ (3) x x x xio 222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C uR C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有2.4 求图(题2.4)所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
解:设系统输入为M (即),输出θ(即),分别对圆盘和质块进行动力学分析,列写动力学方程如下:消除中间变量x,即可得到系统动力学方程KM M c Mm C R c k KJ c C km R cJ mC mJ mmm++=++-++++ θθθθ)(22)()()4(2.5 输出y(t)与输入x(t)的关系为y(t)= 2x(t)+0.5x 3(t)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章习题2- 1如图2-1所示,长度为L 、质量为m 的均质刚性杆由两根刚度为k 的弹簧系住,求杆绕O 点微幅振动的微分方程。
222...2..011T J 2231V 2(sin )(1cos )222()0m 0322ml L Lk mg dT V dtmg k L θθθθθθθ==⋅=⋅+-+=⎛⎫++= ⎪⎝⎭解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 2如图2-2所示,质量为m 、半径为r 的圆柱体,可沿水平面作纯滚动,它的圆心O 用刚度为k 弹簧相连,求系统的振动微分方程。
22 (2)2..0111T J ,2221V ()2()03m 02m r J mr k r dT V dtk θθθθθθ⎛⎫=+= ⎪⎝⎭=+=+=解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 3如图2-3所示,质量为m 、半径为R 的圆柱体,可沿水平面作纯滚动,与圆心O 距离为a 处用两根刚度为k 的弹簧相连,求系统作微振动的微分方程。
图2- 1 图2- 22.222..220111T J ,2221V (2)[()]2()032()02m R J mR k R a dT V dt mR k R a θθθθθ⎛⎫=+= ⎪⎝⎭=⋅++=++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 4求图2-4所示弹簧-质量-滑轮系统的振动微分方程(假设滑轮与绳索间无滑动)。
2.222....0111T J ,2221V ()2()0()02m r J Mr k r dT V dt x r x r M m x kx θθθθθ⎛⎫=+= ⎪⎝⎭=⋅+===++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得其中,,化简得: 2- 5质量可忽略的刚性杆-质量-弹簧-阻尼器系统参数如图2-5所示,2L 杆处于铅垂位置时系统静平衡,求系统作微振动的微分方程。
图2- 3图2- 4 (22)2112233423422t 230...22222112233433422111T m (L )m (L )m [(L L )]2221V [()](1cos )2.W ()()0[()][()k L L m gl c L dtdT V W dtm L m L m L L cL k L L m gl θθθθθθθθ+=++=+--=⋅++=++++++-⎰动能:势能:耗散能:由能量守恒原理,得化简得:]0θ=2- 6系统参数如图2-6所示,刚性杆质量可忽略,求系统的振动微分方程。
2222...2211222122..22211122220.111T J (),22211V ()2()22()0()()0M r m r r a k k r b dT V dt a J Mr m r k r k r bθθθθθθθ⎛⎫=++ ⎪⎝⎭=++=++++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 7试用能量法确定图2-7所示系统的振动微分方程。
(假定图示位置是21m m >,图示位置是系统的静平衡位置)图2- 5 图2- 62.221221..12211T (m a m a )2V ()cos (1cos )()0sin []()cos 0m m g a dT V dtm a m a m m g θαθθθθθαθ=+=-⋅⋅-+=≈++-⋅⋅=动能:势能:由能量守恒原理,得很小,化简得:2- 8试确定图2-8所示串并联弹簧系统的等效刚度。
123123123312123123111(),()e e k k k k k k k k k k k k k k k k k +++=+==++++解:弹簧、并联,和弹簧串联,则等效刚度为:2- 9求跨度为L 的均匀简支梁在离支承点3L 处的等效刚度系数。
22323L322433[]633243F 243k y 4e L LF L L FL y L LEI EI EIFL ⋅⋅⎛⎫⎛⎫=--=⎪ ⎪⎝⎭⎝⎭==解:根据材料力学公式,均匀简支梁处扰度:等效刚度为:2- 10系统参数如图2-9所示,刚性杆质量可忽略,求系统对于广义坐标x 的等效刚度。
图2- 7 图2- 8图2- 92- 11一质量为m、长度为L的均匀刚性杆,在距左端O为nL处设一支承点,如图2-10 所示。
求杆对O点的等效质量。
2- 12如图2-11所示,悬臂梁长度为L,弯曲刚度为EI,质量不计。
求系统的等效刚度和等效质量。
2- 13如图2-12所示,固定滑车力学模型中,起吊物品质量为济,滑轮绕中心0的转动惯 量为J ,假定绳索与滑轮间无滑动,求系统的振动微分方程。
2- 14用视察法建立图2-13所示链式系统的振动微分方程。
简要说明必须注意的问题。
图2- 10 图2- 11 图2- 122- 15绳索-质量系统的参数如图2-14所示,设质量122m m 各段绳索中的张力均为T ,试用刚度法建立系统作微振动的微分方程。
图2- 13 图2- 14 图2- 152- 16如图2-15所示系统中,123k k k k ===,12m m m ==,12r r r ==,12J J J==。
求系统的振动微分方程。
2- 17行车载重小车运动的力学模型如图2-16所示,小车质量为1m ,所受到两根刚度为k 弹簧的约束,悬挂物品质量为2m ,悬挂长度为L摆角θ很小,求系统 的振动微分方程。
图2- 162- 18离散化振动系统力学模型由哪些元件组成?质量元件、弹性元件、阻尼元件2- 19实际系统离散化的依据是什么?用课外的实例举例说明。
简化的程度取决于系统本身的复杂程度、外界对它的作用形式和分析结果的精度要求等(以下20-26题请用拉格朗日方程建立系统运动微分方程)2- 20 图2-17所示系统中,轮A 沿水平面纯滚动,轮心以水平弹簧联于墙上,质量为1m 的物块C 以细绳跨过定滑轮B 联于点A 。
A 、B 两轮皆为均质圆盘,半径为R ,质量为2m 。
弹簧刚度为k ,质量不计。
当弹簧较软,在细绳能始终保持张紧的条件下,求此系统的运动微分方程。
2- 21在图2-18所示的运动系统中,重物1M 的质量为1m ,可沿光滑水平面移动;摆锤2M 的质量为2m ,两个物体用无重杆链接,杆长为l 。
试用第二类拉格朗日方程建立此系统的运动微分方程。
图2- 17 图2- 182- 22运用拉格朗日方程推导单摆的运动微分方程(如图2-19)。
分别以下列参数为广义坐标:(1)转角ϕ;(2)水平坐标x ;(3)铅直坐标y 。
(1) 以ϕ为广义坐标,则系统221T 2(1cos )ml V mgl L T Vϕϕ==-=-代入拉格朗日方程d 0L Ldt ϕϕ⎛⎫∂∂-= ⎪∂∂⎝⎭ 得运动微分方程 sin 0l g ϕϕ+=(2) 以x 为广义坐标,约束方程222x y l +=()22222222220,1122()()xx x y y y xy x m x y ml l x V mg l y mg l l x +==+=-=-=--即则T=对上式时间求导将LT V =-代入拉格朗日方程得()()322222220l l x x xx gx l x ⎡⎤-++-=⎣⎦(3) 以y 为广义坐标,同样有约束方程222x y l +=()()()222222222221,20y T ml V mg l y l y L T V l l y y y y g l y ==--=-⎡⎤-+--=⎣⎦有将代入拉格朗日方程得2- 23斜块A 的质量为Am ,在常力F 作用下水平向右并推动活塞杆BC 向上运动;活塞与杆BC 的质量为m ,上端由弹簧压住,弹簧的刚度系数为k 。
运动开始时,系统静止,弹簧未变形。
见图2-20,不计摩擦,求顶杆BC 的运动微分方程。
2- 24质量为1m 的均质杆OA 长为l ,可绕水平轴O 在铅垂面内转动,其下端有一个与基座相连的螺线弹簧,刚度系数为k ,当=0θ时,弹簧无变形。
OA 杆的A 端装有可自由转动图2- 20 图2- 19的均质圆盘,盘的质量为2m ,半径为r ,在盘面上作用有矩为M 的常力偶,设广义坐标为ϕ和θ,如图2-21所示。
求该系统的运动微分方程。
系统的动能()22222212211111123222T m l m l m r θθϕ⎛⎫⎛⎫=++ ⎪ ⎪⎝⎭⎝⎭广义坐标ϕθ,对应的广义力()()1221sin 32Q MQ k m m gl ϕθθθ=⎛⎫=-++ ⎪⎝⎭代入拉格朗日方程(),,4i i id TTQ i dt q q ϕθ⎛⎫∂-== ⎪∂∂⎝⎭将(1)(2)(3)代入(4)式,得2221122121sin 032m r M m m m l k m gl ϕθθθ=⎛⎫⎛⎫++-+= ⎪ ⎪⎝⎭⎝⎭2- 25设有一个与弹簧相连的滑块A ,其质量为1m ,它可以沿光滑水平面无摩擦的来回滑动,弹簧的刚度系数为k 。
在滑块A 上又连接一个单摆,如图2-22所示。
摆长为l ,B 的质量为2m 。
列出该系统的运动微分方程。
系统动能()222212112cos 22T m x m x l l x ϕϕϕ=+++系统势能221cos 2V kx m gl ϕ=-拉格朗日函数()222221221112cos cos 222L T V m x m x l l x kx m gl ϕϕϕϕ=-=+++-+将上式代入拉格朗日方程0i id L Ldt q q ⎛⎫∂∂-= ⎪∂∂⎝⎭化简得()21222cos sin 0cos sin 0m m x m l m l kx x l g ϕϕϕϕϕϕϕ++-+=++=当ϕ为小量时,cos 1,sin ϕϕϕ≈≈,略去高阶小量2ϕ项,有()12200m m x m l kx x l g ϕϕϕ+++=++=2- 26图示直角三角块A 可以沿着光滑水平面滑动。
三角块的光滑斜面上放置一个均质圆柱体B ,其上面绕有不可伸长的绳索,绳索通过滑轮C 悬挂一质量为m的物块D ,可沿三角块的铅直光滑槽运动。
已知圆柱B 的质量为2m ,三角块A 的质量为3m,o=30θ。
设开始时系统处于静止状态,滑轮C 的大小和质量略去不计。
试确定系统中各物体的运动方程。
解:系统动能()()()()()()2222222222211111322cos 2222235323324T m x m x y mr m x y r x y r my mx mr mry mxy mrx ϕϕϕθϕϕϕ⎛⎫=+++++--- ⎪⎝⎭=++--+系统势能()2sin V mgy mg y r mgr ϕθϕ=-+-=- 把拉格朗日函数 L T V =-代入拉格朗日方程0,,,i i d L Li x y dt q q ϕ⎛⎫∂∂-== ⎪∂∂⎝⎭ 化简得图2- 231 图2- 23 图2- 233633033205322x y r x y r x y r gϕϕϕ-+=-+=-+=解得:23336111011x g y gg r ϕ=-==积分得:222333311511x gt y gtg tr ϕ=-== 考试复习题:一、 图1所示系统中,四个弹簧均未受力,已知m =50kg, k1=9800N/m, k2=k3=4900N/m,k4=19600N/m 。