第2章LS-DYNA初始条件、边界条件和约束.ppt
初始条件与边界条件

u 0. n S
过程可知,有边界条件
当物体与外界接触的表面 S 上各单位面积在单位 时间内流过的热量已知时,由傅立叶定律,在 S dQ u k 上有 dSdt n,这表明温度沿外法线方向的方 向导数是已知的,故边界条件可以表示为
u M,t n S
x 0
二阶偏微分方程
2u 2u 2u u u a11 2 2a12 a 22 2 b1 b2 cu f xy x y x y
可简写为 L[u] f . 定解条件
u x
g
x 0
可简写为 B[u ] g.
叠加原理 1 若 ui 满足线性方程
热传导方程的Cauchy问题
utt a 2 uxx 0 u |t 0 ( x ) u | ( x ) t t 0
( x , t 0) ( x )
波方程的Cauchy问题
由偏微分方程和相应边界条件构成的定解问题称 为边值问题。
§1.3
定解问题的提法
初始条件和边界条件都称为定解条件。 定解问题是指偏微分方程和相应定解条件的结合体。 偏微分方程和相应初始条件构成的定解问题称为初 值问题或者柯西(Cauchy)问题。
ut a 2uxx 0 u |t 0 ( x ) ( x , t 0) ( x )
定解条件。也就是说,当定解条件有微小变动时,
引起解的变动是否足够小。若是,则称解是稳定的,
否则称解是不稳定的。
例 设弦的两端固定于x=0 和x=l,弦的初始位移 如下图,初速度为零,求弦满足的定解问题。 解:
2u 2u a2 0 x l , t 0; 2 2 0 t x u u x l 0; x 0 l x, 0 x u 2 , 0 ut 0 t t 0 l x, l x l 2
LS-DYNA(ANSYS)中文培训教程_2

就当前所选的节点使用 CM 命令创建节点组元 Page 6
加载,定义边界条件及刚体
...一般加载过程
最好给创建的集合定义一个意义明确的名字,这样可以避免将载荷加 到错误的结构上。
定义数组参数 :
在 ANSYS/LS-DYNA中,所有载荷都是按特定时间间隔施加 ,并成 组地定义时间数组参数及相应的载荷数组参数 (*DIM and *SET):
最后,你要指定分析阶段,默认值是瞬态阶段 “Transient only” ,如 果你的载荷是应用于动力松驰分析(用来模拟隐式静态求解),选 “Dynamic relax”。如果包括两种分析,请选 “Trans and Dynam” 。
Page 11
加载,定义边界条件及刚体
...一般加载过程
两种类型均需考虑(继续): 实际温度载荷=用户施加的温度-TREF
TREF 默认值为0
PLANE162, SHELL163, and SOLID164 单元支持
PLANE162 不支持 “drelax” 文件(参见第4-3章), 只有瞬态热载荷或 冲击热载荷适于单元 PLANE162 设置ALPX=0 ,仅定义与温度相关的机械力学性能(EX, PRXY, …) ,使 瞬态热-显式分析稳定。
使用EDLOAD命令加载:
完成组元(component)或Part和参数数组定义后可以使用 EDLOAD 命令来加载:
Solution > Loading Options > Specify Loads
先选择载荷选项中的(Add Loads). 这一选项同时也可以列出载荷 (listing Loads) 和删除载荷( deleting load).
Page 5
LS-dyna ppt 第二章
Training Manual
Explicit Dynamics with ANSYS/LS-DYNA 6.0
•
除2-D PLANE162外 (平面应力,平面应变或轴对称),其它显式单 元都是三维单元
March 7, 2002 Inventory #001630 2-4
单元
…显式动力学单元概述
• 显式单元族在以下方面与 ANSYS 隐式单元明显不同:
• Solution > Analysis Options > Hourglass Ctrls > Local …
•
LS-DYNA 局部施加沙漏控 制是基于Part 号(不是基 于材料号), 所以任何带有 特定材料的Part 将有这种 沙漏控制 。 VAL1=5 通常用来定义减 少沙漏。
•
March 7, 2002 Inventory #001630 2-14
– 大多数显式单元有许多不同的算法,如SHELL163最多有12种算法。 历史上 ,隐式单元根据不同的算法给单元以不同的名字 (如SHELL43 和 63), 但是现 在新的18X隐式单元正向这个趋势发展。
March 7, 2002 Inventory #001630 2-5
单元
…显式动力学单元概述
March 7, 2002 Inventory #001630 2-9
单元
… 沙漏
• 单点积分实体单元的零能模式:
Training Manual
Explicit Dynamics with ANSYS/LS-DYNA 6.0
• 有必要控制零能模式
• 沙漏控制通过附加的刚度或粘性阻尼来阻止这样的模式
第2章
单元
单元
LS-DYNA使用指南中文版本
第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
1.1显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYS Basic Analysis Guide·ANSYS Modeling and Meshing Guide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
1.2显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDBX:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELAX:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNA ASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSREXPORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型关于ANSYS命令按字母顺序排列的详细资料(包括每条命令的特定路径),请参阅《ANSYS Commands Reference》。
LS-DYNA 理论及功能(简介)
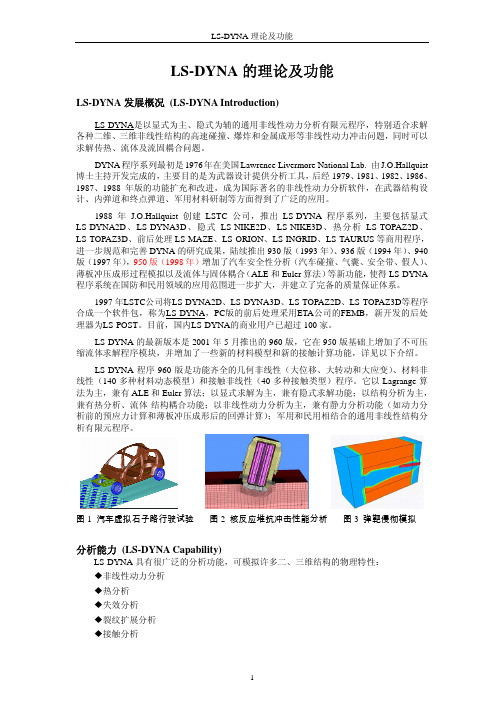
LS-DYNA 理论及功能LS-DYNA 的理论及功能LS-DYNA 发展概况 (LS-DYNA Introduction)LS-DYNA是以显式为主、隐式为辅的通用非线性动力分析有限元程序,特别适合求解 各种二维、三维非线性结构的高速碰撞、爆炸和金属成形等非线性动力冲击问题,同时可以 求解传热、流体及流固耦合问题。
DYNA 程序系列最初是 1976 年在美国 Lawrence Livermore National Lab. 由 J.O.Hallquist 博士主持开发完成的,主要目的是为武器设计提供分析工具,后经 1979、1981、1982、1986、 1987、1988 年版的功能扩充和改进,成为国际著名的非线性动力分析软件,在武器结构设 计、内弹道和终点弹道、军用材料研制等方面得到了广泛的应用。
1988 年 J.O.Hallquist 创建 LSTC 公司,推出 LS-DYNA 程序系列,主要包括显式 LS-DYNA2D、LS-DYNA3D、隐式 LS-NIKE2D、LS-NIKE3D、热分析 LS-TOPAZ2D、 LS-TOPAZ3D、前后处理 LS-MAZE、LS-ORION、LS-INGRID、LS-TAURUS 等商用程序, 进一步规范和完善 DYNA 的研究成果,陆续推出 930 版(1993 年)、936 版(1994 年)、940 版(1997 年),950 版(1998 年)增加了汽车安全性分析(汽车碰撞、气囊、安全带、假人)、 薄板冲压成形过程模拟以及流体与固体耦合(ALE 和 Euler 算法)等新功能,使得 LS-DYNA 程序系统在国防和民用领域的应用范围进一步扩大,并建立了完备的质量保证体系。
1997 年LSTC公司将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序 合成一个软件包,称为LS-DYNA,PC版的前后处理采用ETA公司的FEMB,新开发的后处 理器为LS-POST。
LS-DYNA精编教材
LS-DYNA软件1.1 LS-DYNA 简介LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。
在工程应用领域被广泛认可为最佳的分析软件包。
与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。
1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序合成一个软件包,称为LS-DYNA。
LS-DYNA的最新版本是2004年8月推出的970版。
1.1.1 LS-DYNA功能特点LS-DYNA程序是功能齐全的几何非线性(大位移、大转动和大应变)、材料非线性(140多种材料动态模型)和接触非线性(50多种)程序。
它以Lagrange 算法为主,兼有ALE和Euler算法;以显式求解为主,兼有隐式求解功能;以结构分析为主,兼有热分析、流体-结构耦合功能;以非线性动力分析为主,兼有静力分析功能(如动力分析前的预应力计算和薄板冲压成型后的回弹计算);军用和民用相结合的通用结构分析非线性有限元程序。
LS-DYNA功能特点如下:1.分析能力:z非线性动力学分析z多刚体动力学分析z准静态分析(钣金成型等)z热分析z结构-热耦合分析z流体分析:欧拉方式任意拉格郎日-欧拉(ALE)流体-结构相互作用不可压缩流体CFD分析z有限元-多刚体动力学耦合分析(MADYMO,CAL3D)z水下冲击z失效分析z裂纹扩展分析z实时声场分析z设计优化z隐式回弹z多物理场耦合分析z自适应网格重划z并行处理(SMP和MPP)2.材料模式库(140多种)z金属z塑料z玻璃z泡沫z编制品z橡胶(人造橡胶)z蜂窝材料z复合材料z混凝土和土壤z炸药z推进剂z粘性流体z用户自定义材料3.单元库z体单元z薄/厚壳单元z梁单元z焊接单元z离散单元z束和索单元z安全带单元z节点质量单元z SPH单元4.接触方式(50多种) z柔体对柔体接触z柔体对刚体接触z刚体对刚体接触z边-边接触z侵蚀接触z充气模型z约束面z刚墙面z拉延筋5.汽车行业的专门功能 z安全带z滑环z预紧器z牵引器z传感器z加速计z气囊z混合III型假人模型6.初始条件、载荷和约束功能z初始速度、初应力、初应变、初始动量(模拟脉冲载荷);z高能炸药起爆;z节点载荷、压力载荷、体力载荷、热载荷、重力载荷;z循环约束、对称约束(带失效)、无反射边界;z给定节点运动(速度、加速度或位移)、节点约束;z铆接、焊接(点焊、对焊、角焊);z二个刚性体之间的连接-球形连接、旋转连接、柱形连接、平面连接、万向连接、平移连接;z位移/转动之间的线性约束、壳单元边与固体单元之间的固连;z带失效的节点固连。
LS-DYNA精编教材

LS-DYNA软件1.1 LS-DYNA 简介LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。
在工程应用领域被广泛认可为最佳的分析软件包。
与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。
1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序合成一个软件包,称为LS-DYNA。
LS-DYNA的最新版本是2004年8月推出的970版。
1.1.1 LS-DYNA功能特点LS-DYNA程序是功能齐全的几何非线性(大位移、大转动和大应变)、材料非线性(140多种材料动态模型)和接触非线性(50多种)程序。
它以Lagrange 算法为主,兼有ALE和Euler算法;以显式求解为主,兼有隐式求解功能;以结构分析为主,兼有热分析、流体-结构耦合功能;以非线性动力分析为主,兼有静力分析功能(如动力分析前的预应力计算和薄板冲压成型后的回弹计算);军用和民用相结合的通用结构分析非线性有限元程序。
LS-DYNA功能特点如下:1.分析能力:●非线性动力学分析●多刚体动力学分析●准静态分析(钣金成型等)●热分析●结构-热耦合分析●流体分析:✧欧拉方式✧任意拉格郎日-欧拉(ALE)✧流体-结构相互作用✧不可压缩流体CFD分析●有限元-多刚体动力学耦合分析(MADYMO,CAL3D)●水下冲击●失效分析●裂纹扩展分析●实时声场分析●设计优化●隐式回弹●多物理场耦合分析●自适应网格重划●并行处理(SMP和MPP)2.材料模式库(140多种)●金属●塑料●玻璃●泡沫●编制品●橡胶(人造橡胶)●蜂窝材料●复合材料●混凝土和土壤●炸药●推进剂●粘性流体●用户自定义材料3.单元库●体单元●薄/厚壳单元●梁单元●焊接单元●离散单元●束和索单元●安全带单元●节点质量单元●SPH单元4.接触方式(50多种)●柔体对柔体接触●柔体对刚体接触●刚体对刚体接触●边-边接触●侵蚀接触●充气模型●约束面●刚墙面●拉延筋5.汽车行业的专门功能●安全带●滑环●预紧器●牵引器●传感器●加速计●气囊●混合III型假人模型6.初始条件、载荷和约束功能●初始速度、初应力、初应变、初始动量(模拟脉冲载荷);●高能炸药起爆;●节点载荷、压力载荷、体力载荷、热载荷、重力载荷;●循环约束、对称约束(带失效)、无反射边界;●给定节点运动(速度、加速度或位移)、节点约束;●铆接、焊接(点焊、对焊、角焊);●二个刚性体之间的连接-球形连接、旋转连接、柱形连接、平面连接、万向连接、平移连接;●位移/转动之间的线性约束、壳单元边与固体单元之间的固连;●带失效的节点固连。
LS-DYNA 精编教材
LS-DYNA软件1.1 LS-DYNA 简介LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。
在工程应用领域被广泛认可为最佳的分析软件包。
与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。
1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序合成一个软件包,称为LS-DYNA。
LS-DYNA的最新版本是2004年8月推出的970版。
1.1.1 LS-DYNA功能特点LS-DYNA程序是功能齐全的几何非线性(大位移、大转动和大应变)、材料非线性(140多种材料动态模型)和接触非线性(50多种)程序。
它以Lagrange 算法为主,兼有ALE和Euler算法;以显式求解为主,兼有隐式求解功能;以结构分析为主,兼有热分析、流体-结构耦合功能;以非线性动力分析为主,兼有静力分析功能(如动力分析前的预应力计算和薄板冲压成型后的回弹计算);军用和民用相结合的通用结构分析非线性有限元程序。
LS-DYNA功能特点如下:1.分析能力:●非线性动力学分析●多刚体动力学分析●准静态分析(钣金成型等)●热分析●结构-热耦合分析●流体分析:✧欧拉方式✧任意拉格郎日-欧拉(ALE)✧流体-结构相互作用✧不可压缩流体CFD分析●有限元-多刚体动力学耦合分析(MADYMO,CAL3D)●水下冲击●失效分析●裂纹扩展分析●实时声场分析●设计优化●隐式回弹●多物理场耦合分析●自适应网格重划●并行处理(SMP和MPP)2.材料模式库(140多种)●金属●塑料●玻璃●泡沫●编制品●橡胶(人造橡胶)●蜂窝材料●复合材料●混凝土和土壤●炸药●推进剂●粘性流体●用户自定义材料3.单元库●体单元●薄/厚壳单元●梁单元●焊接单元●离散单元●束和索单元●安全带单元●节点质量单元●SPH单元4.接触方式(50多种)●柔体对柔体接触●柔体对刚体接触●刚体对刚体接触●边-边接触●侵蚀接触●充气模型●约束面●刚墙面●拉延筋5.汽车行业的专门功能●安全带●滑环●预紧器●牵引器●传感器●加速计●气囊●混合III型假人模型6.初始条件、载荷和约束功能●初始速度、初应力、初应变、初始动量(模拟脉冲载荷);●高能炸药起爆;●节点载荷、压力载荷、体力载荷、热载荷、重力载荷;●循环约束、对称约束(带失效)、无反射边界;●给定节点运动(速度、加速度或位移)、节点约束;●铆接、焊接(点焊、对焊、角焊);●二个刚性体之间的连接-球形连接、旋转连接、柱形连接、平面连接、万向连接、平移连接;●位移/转动之间的线性约束、壳单元边与固体单元之间的固连;●带失效的节点固连。
LS-Dyna培训

lancy@BUAA 2011.12.31✧✧✧✧✧ (LS-DYNA Aerospace Working Group)第一章概述第二章单元和PART第三章边界条件、载荷与刚体第四章接触界面与求解控制第五章重启动分析第六章实例演示✧世界上最著名的通用显式动力有限元程序✧用于求解高度非线性问题有效处理多种接触问题(50+)丰富材料本构(140+)高效解决大变形、大转动和大应变问题✧ANSYS 与 LS-DYNA 的无缝集成LS-DYNA 求解器在 ANSYS中的完全集成所有前后处理采用标准ANSYS界面支持隐式 -- 显式顺序求解✧以Lagrange算法为主,兼有ALE和Euler算法✧以显示求解为主,兼有隐式求解功能✧以非线性分析为主,兼有静力分析功能✧以结构分析为主,兼有热分析、流固耦合功能✧强大的分析能力(非线性动力、热、流体、多场耦合分析,失效与裂纹扩展分析,设计优化,并行处理)✧丰富的材料模型(金属、塑料、泡沫、蜂窝材料、复合材料、粘性流体、推进剂等,支持用户自定义)✧易用的单元库(体、壳、梁单元,焊接单元,离散单元,SPH单元)✧充足的接触方式(柔体、刚体,流固界面)✧SPH、ALE和Euler算法✧隐式和显示交替求解瞬态、稳态热分析✧电子产品跌落测试分析(DROP TEST)✧强大的软硬件平台支持(MPP/SMP)✧自定义网格剖分(薄板冲压变形、三维锻压)✧边界元法(用于求解流体绕刚体或变形体的无粘不可压附着流)✧不可压缩流场分析(模拟瞬态不可压粘性流动问题,采用超级计算机的算法结构,大幅度提高计算性能)001322 10 JAN 20001-9LS-DYNA文件系统分为输入文件和输出文件Jobname.kLS-DYNA 输入流文件,可以用ANSYS的SOLVE命令时自动产生,也可以采用LS-PREPOST等前处理软件生成。
K文件中包括所有几何、载荷、材料和控制信息✧二进制文件✧关键字*DATABASE_BINARY_OPTION✧ASCII文件✧关键字*DATABASE_OPTION✧D3PLOT:用来记录应力、应变等结果数据,可以用来作云图和动画。
LS-DYNA使用指南中文版本
L S-D Y N A使用指南中文版本-CAL-FENGHAI.-(YICAI)-Company One1第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYS Basic Analysis Guide·ANSYS Modeling and Meshing Guide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDBX:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELAX:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNA ASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSREXPORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型关于ANSYS命令按字母顺序排列的详细资料(包括每条命令的特定路径),请参阅《ANSYS Commands Reference》。
LS-DYNA使用指南中文版本
第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYS Basic Analysis Guide·ANSYS Modeling and Meshing Guide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDBX:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELAX:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNA ASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSREXPORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型关于ANSYS命令按字母顺序排列的详细资料(包括每条命令的特定路径),请参阅《ANSYS Commands Reference》。
lsdyna使用方法2
第1章ANSYS/LS-DYNA基石出知识有限元2009-05-12 20:06:17 阅读62 评论0 字号:大中小订阅近年来,非线性结构动力仿真分析方面的研究工作和工程应用取得了很大的发展。
20世纪90年代中后期,著名的通用显式动力分析程序LS-DYNA被引入中国,在相关的工程领域中迅速得到广泛的应用,已成为国内科研人员开展数值实验的有力上具。
LS-DYNA的显式算法特别适合于分析各种非线性结构冲击动力学问题,如爆炸,结构碰撞、金属加工成形等高度非线性的问题,同时还可以求解传热、流体以及流固耦合问题。
LSTC公司和ANSYS公司合作推出的ANSYS/LS-DYNA软件,结合了LS-DYNA强大的显式动力分析方法与ANSYS的前后处理功能。
对于曾经接触过ANSYS结构分析的读者而言,谊程序无疑是最理想的辅助动力分析工具。
本章的目的在于全面介绍ANSYS/LS-DYNA的基础知识,包括下面的几个主题:+ LS-DYNA计算程序的发展过程☆LS-DYNA的分析功能与应用范围+ ANSYS/LS-DYNA的工作环境+ ANSYS/LS-DYNA的一般分析过程+ ANSYS~S-DYNA的程序组织和丈件系统+ LS-DYNA显式动力分析的基本概念1.1 LS—DYNA计算程序的发展过程1976年,美国LawrenceLivermore国家实验室J.O.Hallquist博士主持开发完成了DYNA程序系列,主要目的是为武器设计提供分析工具。
1986年部分DYNA源程序在Public Domain(北约局域网)发布,从此在研究和教育机构广泛传播,被公认为是显式有限元程序的先导,是目前所有显式求解程序的基础代码。
1988年,J.O.Hallquist创建LSTC公司(LivermoreSoftwarenchnolOWCorporation),推出LS-DYNA 程序系列,主要包括显式LS-DYNA2D、LS-DYNA3D,隐式LS-NIKE2D、LS-NIKE3D、热分析LS-TOPAZ2D、LS-TOPAZ3D,前后处理LS-MAZE、LS-ORION、LS-INGRID、LS-TAURUS等商用程序,逐步规范和完善程序的分析功能,陆续推出930版(1993年)和936版(1995年),同时增加了汽车安全性分析、金属板的冲压成形以及流固耦合(ALE算法和Eluer算法),使得LS-DYNA程序系统的应用范围不断扩大,并建立起完备的软件质量保证体系。
LS-DYNA使用指南

ANSYS/LS-DYNA 使用指南前言本资料来源于互联网,据说来源于安世亚太,基本上是ANSYS 的帮助文件的翻译。
本人遂排版整理,对原文中的公式进行了编辑排版,并对部分错误进行了修改,当然,错误在所难免,仅供自己查阅学习。
版权归原作者所有!如有人非法用于商业用途,与本人无关。
人就一个字2009-5-7目录第一章引言 (1)1.1 显式动态分析求解步骤概述 (1)1.2 显式动态分析采用的命令 (1)1.3 本手册使用指南 (4)1.4 何处能找到显式动态例题 (5)1.5 其它信息 (5)第二章单元 (6)2.1 实体单元和壳单元 (7)2.1.1 SOLID164 (7)2.1.2 SHELL163 (8)2.1.3 通用壳单元算法 (8)2.1.4 薄膜单元算法 (9)2.1.5 三角型薄壳单元算法 (9)2.1.6 PLANE162 (12)2.2 梁单元和杆单元 (13)2.2.1 BEAM161 (13)2.2.2 LINK160 (14)2.2.3 LINK167 (14)2.3 离散单元 (15)2.3.1 COMBI165弹簧-阻尼单元 (15)2.3.2 MASS166 (16)2.4 一般单元特性 (16)第三章建模 (17)3.1 定义单元类型和实常数 (17)3.2 定义材料特性 (18)3.3 定义几何模型 (18)3.4 网格划分 (18)3.5 定义接触面 (20)3.6 建模的一般准则 (20)3.7 PART的定义 (21)3.7.1 Part集合 (24)3.8 自适应网格划分 (24)第四章加载 (28)4.1 一般载荷选项 (28)4.1.1 组元 (29)4.1.2 数组参数 (30)4.1.3 施加载荷 (31)4.1.4 数据曲线 (34)4.1.5 在局部坐标系中定义载荷 (36)4.1.6 指定Birth和Death时间 (37)4.2 约束和初始条件 (37)4.2.1 约束 (37)4.2.2 焊接 (39)4.2.3 初始速度 (39)4.3 耦合和约束方程 (41)4.4 非反射边界 (42)4.5 温度载荷 (42)4.6 动力松弛 (44)第五章求解特性 (46)5.1 求解过程 (46)5.2 LS-DYNA终止控制 (46)5.3 共享存储器并行处理 (47)5.4 求解控制和监控 (48)5.5 显示小尺寸单元 (50)5.6 编辑LS-DYNA的输入文件 (50)5.6.1 方法A (51)5.6.2 方法B (51)5.6.3 使用预先存在的FILE.K (52)第六章接触表面 (54)6.1 接触的定义 (54)6.1.1 列表,显示和删除接触实体 (57)6.2 接触选项 (58)6.2.1 定义接触类型 (59)6.2.2 定义接触选项 (60)6.3 接触搜索方法 (63)6.3.1 网格连接跟踪 (63)6.3.2 批处理方法 (63)6.3.3 限制接触搜索域 (63)6.4 壳单元的特殊处理 (64)6.5 接触深度控制 (64)6.6 接触刚度 (65)6.6.1 罚因子的选择 (65)6.6.2 对称刚度 (66)6.7 2D接触选项 (66)第七章材料模型 (67)7.1 定义显示动态材料模型 (69)7.2 显式动态材料模型的描述 (70)7.2.1线弹性模型 (70)7.2.2非线性弹性模型 (72)7.2.3 非线性无弹性模型 (74)7.2.4 压力相关的塑性模型 (86)7.2.5 泡沫模型 (90)7.2.6 状态方程 (94)7.2.7 离散单元模型 (104)7.2.8 刚性体模型 (107)第八章刚性体 (109)8.1 定义惯性特性 (109)8.2 加载 (111)8.3 变形体和刚性体部件间的转换 (111)8.4 节点刚体 (112)第九章沙漏 (113)第十章质量缩放 (115)第十一章子循环 (117)第十二章后处理 (119)12.1 输出控制 (119)12.1.1 结果文件(Jobname.RST)和时间历程文件(Jobname.HIS)的比较 (119)12.1.2 生成POST26的ComponentS (120)12.1.3 为POST26记录输出文件 (120)12.2 使用ANSYS/LS-DYNA的POST1 (121)12.2.1 动画结果 (121)12.2.2 单元数据输出 (122)12.2.3 自适应网格划分的处理结果 (123)12.3 在ANSYS/LS-DYNA中使用POST26 (124)第十三章重启动 (125)13.1 重启动Dump文件 (125)13.2 EDSTART 命令 (125)13.2.1 新分析 (126)13.2.2 简单重启动 (126)13.2.3 小型重启动 (126)13.2.4 完全重启动 (128)13.3 输出文件的影响 (130)第十四章显式-隐式顺序求解 (132)14.1 显式-隐式顺序求解 (132)第十五章隐式-显式顺序求解 (137)15.1 预载荷结构的隐式-显式顺序求解 (137)第十六章跌落测试模块 (142)16.1 简介 (142)16.2 选择DTM模块启动ANSYS (142)16.3 典型的跌落分析步骤 (143)16.3.1 基本的跌落测试分析步骤 (143)16.3.2 屏幕坐标的定义 (146)第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
LSDYNA使用指南中文本
第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
1.1显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYS Basic Analysis Guide·ANSYS Modeling and Meshing Guide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
1.2显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDBX:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELAX:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNA ASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSREXPORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型关于ANSYS命令按字母顺序排列的详细资料(包括每条命令的特定路径),请参阅《ANSYS Commands Reference》。
LS-DYNA使用指南中文版本
第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
1.1显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYS Basic Analysis Guide·ANSYS Modeling and Meshing Guide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
1.2显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDBX:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELAX:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNA ASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSREXPORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型关于ANSYS命令按字母顺序排列的详细资料(包括每条命令的特定路径),请参阅《ANSYS Commands Reference》。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
焊接失效 失效时间 » 在指定的时间自动失效 拉伸失效 » 因塑性应变
有效节点塑性应变> 失效塑性应变
» 焊点外的金属板撕裂失效,因为塑性发生在焊接 处周围的材料中
焊接失效
脆性失效
» 点焊
Sn = 失效的法向力
fn = 法向界面力
Ss =失效的剪切力
fs =剪切界面力
» fillet-角焊, butt-对接焊缝
刚体的Part连接 刚体 » 由动力学方程控制运动 »无失效准则 » 允许转动 *CONSTRAINED_EXTRA_NODES *CONSTRAINED_JOINT *CONSTRAINED_NODEL_RIGID_BODY *CONSTRAINED_RIGID_BODIES
其他的 Part 连接技术 一致的节点 » 扭曲的几何体 » 无失效准则 » 不容易分离parts (如操作,重划分) » 接触厚度冲突 梁 »更复杂的定义 »影响时间步计算 接触 (更新) » 固连(N2S, S2S) » 固连失效 (N2S, S2S)
第2章LS-DYNA初始条件、边 界条件和约束
概述
• 若FEA模型已具有节点,单元,材料特性和 parts等。则可以: »施加:初始条件、边界条件、载荷和约束 »必须具有:boxes,曲线,sets,矢量等
• 当parts间发生碰撞,或与其它问题撞击时: » 刚墙 » 接触 (第三章)
• 怎样测定载荷/动量 »接触力 »横截面分析
初始条件
*INITIAL_VELOCITY 对节点和体施加一个初始的平 动和转动速度 » 系列节点 »系列节点外的节点 » 定义的box中的所有节点
*INITIAL_VELOCITY_NODE » 单个的节点
*INITIAL_VELOCITY_GENERATION »对于平动和转动的体
– parts – 系列 parts – 系列节点 » 与前两个初始速度的施加方法不能同 时使用
示例 相关关键字 *BOUNDARY_SYMMETRY_FAILURE *DEFINE_COORDINATE_VECTOR *DEFINE_CURVE *LOAD_NODE_POINT *SET_SEGMENT
*BOUNDARY_SYMMETRY_FAILURE
刚墙 目的:定义一个刚性面 »模拟屏障、摆锤和压制机等 阻止节点穿透一个面 » 系列节点、一个BOX中的节点,所选节点外的节点 刚墙能量: GLSTAT 刚墙力: RWFORC or GCEOUT 关键字: *RIGIDWALL_PLANAR
SPOT, FILLET, BUTT, CROSS_FILLET, COMBINED 节点坐标可以相同 输出可以指定于一局部坐标系中
点焊
节点的顺序和局部 坐标系的方向对于 决定焊点失效是很 重要的
Fillet 角焊
对于Fillet 焊,节点的 顺序和局部坐标系的方 向如图
对于Butt 焊,节点 的顺序和局部坐标 系的方向如图
*SET – 节点 定义节点组 » set ID号(SID) » 节点的ID号 (NID’s) *SET_NODE_LIST » 每行定义8个节点 *SET_NODE_COLUMN »每行定义1个节点
初始条件
*DEFINE_BOX 定义一个BOX形状的体, BOX内 的任何事物都可以作为输入 BOX的ID号 (BOXID) 定义BOX的范围: » Xmin - Xmax »Ymin - Ymax » Zmin - Zmax
爆炸球的例子
*KEYWORD 400000000 *TITLE an exploding sphere $ $$$$$$ An explosive material is placed inside of a sphere. $$$$$$ The explosive is lit, expands, and impacts the sphere. $$$$$$ The sphere expands, reaches yield, seam lines fail and fragments $$$$$$ fly apart. $$ John D. Reid 6/4/98 $$ Units: unknown - possibly gm, cm, micros, 1E7N, Mbar, 1E7Ncm $
边界条件
*BOUNDARY_PRESCRIBED_MOTION 对节点、系列节点或刚体施加节点运动(平动或转动) • 可适用的自由度运动: » 位移 »速度 »加速度 • 载荷曲线描述的运动 • 起始和结束的时间
*DEFINE_CURVE 定义一(载荷)曲线 载荷曲线ID号 (CLID) 定义曲线上的点 »横坐标 (x) –纵坐标 (y) 缩放因子 偏移 例子 » 力 vs 变形 » 速度vs 时间
n = 法向应力
f = 失效应力
n = 焊接方向剪切力 = 失效参数
t =焊接方向法向剪切力
*CONSTRAINED_SPOБайду номын сангаасWELD 两节点点焊
刚性无质量梁
不能传输壳的法向转动刚度
节点坐标不能一致
焊点连接的节点不能是其他约束设置中 的节点,如约束相同的自由度,固连的 界面,或刚体
*CONSTRAINED_GENERALIZED_WELD 方式:
*DEFINE_VECTOR 定义一个矢量 »矢量ID号 (VID) »确定尾 (xt, yt, zt) 和头 (xh, yh, zh)坐标
*BOUNDARY_CYCLIC
边界条件
仅对体单元 *BOUNDARY_NON_REFLECTING » 边界处的应力梯度为零 » 边界随冲击波移动 *BOUNDARY_SLIDING_PLANE » 约束一系列节点在一任意方位的平面或 矢量上移动 *BOUNDARY_SYMMETRY_FAILURE » 约束节点于一定义的平面上 » 当周围的单元达到定义的拉应力时节点 成为自由节点
载荷
• 目的:定义施加的“力 ” »梁 »体 » 爆炸效果 » 热,温度 » 节点和刚体 » 壳(压力)
• 避免单点集中载荷 » 物理上无意义 » 防止沙漏模式 • 避免阶跃载荷 • 要求一载荷曲线 • 载荷能缩放
载荷
*LOAD_BEAM • 沿梁单元局部轴(r,s,t)定义牵
引载荷 • 梁单元或系列梁单元 • 每单位长度上的力
*LOAD_BODY • 施加指定的体载荷
» 重力加速度
– 概念上是加速指定的坐标系,所以 ,施加在模型上的惯性载荷是反方向 的
– 因重力产生的预应力,与动力松弛 结合
» 角速度
• 自由度: X, Y, Z, RX, RY, RZ
所有的节点或系列 parts
*LOAD_NODE 和*LOAD_RIGID_BODY 施加一载荷于一节点,系列节点或刚体上 x, y, or z 力 x, y, or z 力矩 Follower 力 或力矩 »力作用方向为平面的法向 坐标系可为总体坐标或局部坐标
爆炸球的例子
爆炸球的例子
爆炸球的例子
爆炸球的例子
爆炸球的例子
爆炸球的例子
边界条件
*BOUNDARY_OPTION 目的:定义施加在边界节点上的运动 » 对流、通量、辐射和温度 » 循环对称 » 无反射边界、滑动边界和具有失效准则的 对称 (固体) » 强制运动载荷 » SPC约束
• 旋转对称 • 旋转轴矢量 » x, y 和z 轴矢量 » 矢量必须是全局的 • 2条边界线 (使用节点sets)
初始条件
• 起爆点和动量 • 初始应力/应变 • 初始温度 • 初始速度 缺省状态下初始应力、温度和速度为零 边界条件高于初始条件
初始条件
*INITIAL _DETONATION 和*INITIAL_MOMENTUM 用于模拟施加在体单元上的一种脉冲载荷 起爆点:引爆炸药材料(parts) »
动量: 单元上施加一个初始动量
*RIGIDWALL_GEOMETRIC 平板、棱柱、圆柱、球
运动条件
»固定 »运动: 速度或位移、载荷曲 线、矢量
多个几何体墙可以定义,用来 模拟多种几何体的结合
*CONTACT_ENTITY 一般的具有任意表面的刚体及运动 几何实体 » 圆柱、平板、球、圆环、椭圆、VDA 性能改进 » 对接触实体和可变形体间的接触进行封闭形状接 触计算 精度改进 » 表面与网格划分无关
Butt Weld
Part 连接 *CONSTRAINED_NODE_SET »两节点或更多节点的平动约束 » x, y, z, 或任意组合 » 失效时间
Part 连接 *CONSTRAINED_SHELL_TO_SOLID » 在壳边和体单元间定义固连 壳单元节点与坐标相同的体单元节点约束 体单元节点(线矢量)是线性约束 » 节点刚体可以完成相同的功能
定义横截面 • 通过指定定义横截面: »横截面的节点 » 在这些节点上计算力所使用的单元 传送力的符号由这些单元位于这些节点的哪一边来决定 自动 » *DATABASE_CROSS_SECTION_PLANE • 用户指定 » *DATABASE_CROSS_SECTION_SET • 指定输出频率 » *DATABASE_SECFORC
*RIGIDWALL_GEOMETRIC *CONTACT_ENTITY
*RIGIDWALL_PLANAR 有限或无限 运动条件: » 固定 » 运动: 质量和速度 Soft wall 方式 » 到0速度的循环数 由特定的节点跟踪刚墙 Ortho各向异性摩擦 »两种法线方向互相垂直的摩擦系数 » 如:旋转物体:横向的摩擦系数更大
破裂单元 *CONSTRAINED_TIE-BREAK »壳边对壳边界面 »作为塑性应变的一个函数局部失效 » 模拟沿预先定义的线(如缝合线或结构铰)失效的结果 *CONSTRAINED_TIED_NODES_FAILURE »固连的节点set (节点必须坐标一致) »可有多个节点 (大于2) (如4个壳的角节点) » 可变形的薄壳和honeycomb材料的体单元 » 基于塑性应变的失效