逆变器滤波器参数设置
基于PWM逆变器的LC滤波器

第 5期
俞杨威 ,等 : 基于 PWM 逆变器的 LC滤波器
・51・
因此 ,滤波器设计目标包括 : ① 输出电压的谐波含量 小; ② 滤波参数和体积小 ; ③ 滤波器的阻频特性好 ; ④ 滤波系统消耗的功率小 。根据以上原则 , 即可 对滤波器的特性进行分析 。 LC 滤波器的传递函数为 :
U o ( s) = U i ( s) 1 s +
ω1 —基波角频率 ;ωm —m 次谐波角频率 ; Is — 式中 电感电流的基波有效值 ; ^ Im s —m 次电感电流的谐波
^ 有效值 ; U o —电容电压的基波有效值 ; U m 次电 mo —
容电压的谐波有效值 。 对于 PWM逆变器的输出电压而言 , 谐波分量相 对于基波来说非常小 , 因而式 ( 2 ) 可以简化为 : 2 2 ( 3) Q ≈ ω1 L Is +ω1 CU o ωL = LC 滤波器的截止角频率 :
参考文献 ( Reference) :
[1] 伍家驹 ,章义国 ,任吉林 ,等 . 单相 PWM 逆变器的滤波
3 设计实例
本研究针对单相 PWM 逆变电源进行了滤波器 参数设计 , 逆变器参数如下 :输出电压 U o = 240 V , 容量 6 kVA , 输出基波频率 f1 = 50 H z, 载波频率 fs = 20 kH z。 逆变器主电路拓扑 , 如图 1 所示 , 控制电 路用数字控制实现 。 综合考虑滤波器输出电压 THD、 系统的动态响 应以及体积 、 重量等因素 , 选取截止频率 fL = 0. 1 fs = 2 kHz,结合式 ( 11) , 选取 :L = 700 μH; C = 10 μF。 此时 , 滤波器传递函数为 :
1
LC ( 4)
逆变器调试参数表
一、参数复位到工厂设置P053=6 允许通过PMU和串口变更参数P060=2 选择固定设置菜单P366=0 具有PMU的标准设置,通过MOP的设定值P970=0 参数复位二、系统设置P060=5 选择系统设置菜单P068=0 没有输出滤波器P071=510 装置输入电压P095=10 电机类型:异步/同步IEC(国际标准)P100=1 开环V/F控制=4 带编码器的闭环控制P101=380 输入电机额定电压P102=?输入电机额定电流(成组传动:所有电机电流之和)P107=50 输入电机额定频率P108=?输入电机额定转速P114=0 标准应用=3 高强度的冲击系统(轧钢传动)P115=1 计算电机模型,自动参数设置P130=10 无编码器=11 有脉冲编码器P151= 编码器脉冲数P330=0 特性:线性(恒转矩传动)(P100=0、1、2时才设置)1 特性:抛物线特性(风机/泵)(P100=0、1、2时才设置)P380=?用于输出警告A023“电机过热”的电机温度传感器选择,=1激活PTC P381=?用于输出故障F023“电机过热”的电机温度传感器选择,=1激活PTC P382==0 电机冷却,自风冷1电机冷却,强迫风冷P383==?电机发热时间常数0 电机不希望有发热保护P384.2=?电机负载限制(百分数)P452=?正转的最大频率或者速度P453= ?反转的最大频率或者速度P060=1 回到参数菜单P128= (默认值,装置最大输出电流)P462=10 从静止加速到参考频率(P352)的时间P463=0 升速时间的单位(S)P464=10 从参考频率(P352)减速到静止的时间P465=0 减速时间的单位(S)三、简单应用设置(仅用于出厂调试)P060=3 选择简单应用设置菜单P071=510 装置输入电压P095=10 电机类型:异步/同步IEC(国际标准)P100=1 开环V/F控制=4 带编码器的闭环控制P101=380 输入电机额定电压P102=?输入电机额定电流(成组传动:所有电机电流之和)P107=50 输入电机额定频率P108=?输入电机额定转速P114=0 标准应用=3 高强度的冲击系统(轧钢传动)P368=0 PUM+MOP给定=1 端子排上的模拟量/数字量输入给定=6 PROFIBUS(CBP)给定P422=?MOP给定的下限幅,默认为0,不能通过MOP改变转向。
高频逆变电源 滤波为50hz

高频逆变电源滤波为50hz
高频逆变电源是一种将直流电转换为高频交流电的装置,通常用于电子设备和工业应用中。
在高频逆变电源中,滤波是非常重要的,因为它可以帮助减少电路中的杂散信号和噪音,确保输出的电流和电压的稳定性。
在这种情况下,如果滤波频率为50Hz,那么它意味着滤波器的设计是针对50Hz的电源频率进行的。
从电气工程角度来看,滤波器的设计需要考虑到高频逆变电源输出的频率范围,以及需要滤除的频率成分。
在这种情况下,滤波器需要具有足够的带宽来滤除高频逆变电源输出中可能存在的杂散频率成分,同时保留所需的50Hz输出。
这可能涉及到使用适当的电容器和电感元件来构建滤波器电路。
另外,从应用角度来看,滤波器的频率设置也会影响到高频逆变电源的性能和稳定性。
如果滤波频率不合适,可能会导致输出波形失真、功率损失甚至设备故障。
因此,确保滤波器频率与高频逆变电源输出频率匹配是非常重要的。
总之,高频逆变电源的滤波频率为50Hz意味着滤波器是为了滤
除杂散频率成分并保持稳定的输出而设计的。
这需要在电路设计和
应用中进行全面考虑,以确保高频逆变电源的正常运行和性能稳定。
三相并网逆变器LCL滤波特性分析及控制研究

三相并网逆变器LCL滤波特性分析及控制研究一、概述随着可再生能源的快速发展,三相并网逆变器在分布式发电系统中扮演着越来越重要的角色。
由于并网逆变器产生的谐波会对电网造成污染,影响电能质量,滤波器的设计成为了一个关键问题。
LCL滤波器以其良好的滤波效果和较小的体积优势,在三相并网逆变器中得到了广泛应用。
LCL滤波器由电感、电容和电感组成,其特性分析对于优化滤波效果、提高电能质量具有重要意义。
本文将对三相并网逆变器LCL滤波器的滤波特性进行深入分析,包括其频率特性、阻抗特性等,以揭示其滤波机理和影响因素。
为了充分发挥LCL滤波器的优势,对逆变器的控制策略进行研究也是必不可少的。
本文将对三相并网逆变器的控制策略进行探讨,包括传统的PI控制、无差拍控制以及基于现代控制理论的先进控制策略等。
通过对不同控制策略的比较和分析,旨在找到最适合LCL滤波器的控制方法,以提高并网逆变器的性能和稳定性。
本文旨在通过对三相并网逆变器LCL滤波特性的分析和控制研究,为优化滤波效果、提高电能质量提供理论支持和实践指导。
这不仅有助于推动可再生能源的发展,也为电力电子技术的创新和应用提供了新的思路和方法。
1. 研究背景和意义随着可再生能源的快速发展和智能电网建设的深入推进,三相并网逆变器作为新能源发电系统与电网之间的关键接口设备,其性能与稳定性对于电力系统的安全、高效运行至关重要。
在实际应用中,并网逆变器产生的谐波会对电网造成污染,影响电能质量。
为了降低谐波污染,提高电能质量,LCL滤波器因其良好的滤波性能被广泛应用于三相并网逆变器中。
LCL滤波器作为一种典型的无源滤波器,能够有效地抑制并网逆变器产生的高频谐波,降低其对电网的污染。
LCL滤波器的引入也给并网逆变器的控制系统带来了新的挑战。
一方面,LCL滤波器的参数设计需要综合考虑滤波效果和系统稳定性另一方面,由于LCL滤波器固有的谐振特性,如果不加以控制,很容易引发系统振荡,影响逆变器的正常运行。
逆变器滤波器参数设置
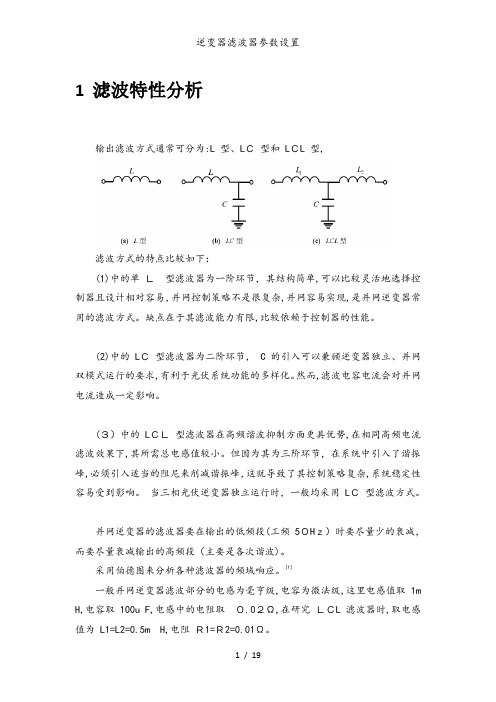
1滤波特性分析输出滤波方式通常可分为:L 型、LC型和 LCL 型,滤波方式的特点比较如下:(1)中的单L型滤波器为一阶环节,其结构简单,可以比较灵活地选择控制器且设计相对容易,并网控制策略不是很复杂,并网容易实现,是并网逆变器常用的滤波方式。
缺点在于其滤波能力有限,比较依赖于控制器的性能。
(2)中的 LC型滤波器为二阶环节, C 的引入可以兼顾逆变器独立、并网双模式运行的要求,有利于光伏系统功能的多样化。
然而,滤波电容电流会对并网电流造成一定影响。
(3)中的 LCL型滤波器在高频谐波抑制方面更具优势,在相同高频电流滤波效果下,其所需总电感值较小。
但因为其为三阶环节,在系统中引入了谐振峰,必须引入适当的阻尼来削减谐振峰,这就导致了其控制策略复杂,系统稳定性容易受到影响。
当三相光伏逆变器独立运行时,一般均采用 LC型滤波方式。
并网逆变器的滤波器要在输出的低频段(工频 50Hz)时要尽量少的衰减,而要尽量衰减输出的高频段(主要是各次谐波)。
采用伯德图来分析各种滤波器的频域响应。
[1]一般并网逆变器滤波部分的电感为毫亨级,电容为微法级,这里电感值取 1m H,电容取 100u F,电感中的电阻取0.02Ω,在研究LCL滤波器时,取电感值为 L1=L2=0.5m H,电阻R1=R2=0.01Ω。
对于单电感滤波器,以输入电压和输出电流为变量,并且实际的电感中含有一定电阻,其传递函数为:对于采用LC滤波器的并网逆变器,在并网运行时,电网电压直接加在滤波器中的电容两端,因此此时电容不起滤波作用,可以看作是一个负载,从滤波效果上来说,它等同于单电感滤波器。
并且对于被控量选取为电感电流IL 的采用 LC滤波的并网逆变器,由于有电容的作用,其控制电流IL与实际输出电流Io 之间有如下图所示:上式中可以看出,电感电流LI 将受到电网电压gU 的变化与并网电流0I 的影响。
所以在控制过程中要参照电网电压的有效值不断调整基准给定的幅值与相位。
三相PWM逆变器输出LC滤波器设计方法
三相PWM逆变器输出LC滤波器设计方法一、本文概述随着可再生能源和电力电子技术的快速发展,三相PWM(脉宽调制)逆变器在电力系统中得到了广泛应用。
为了改善逆变器的输出波形质量,降低谐波对电网的污染,LC滤波器被广泛应用于逆变器的输出端。
本文旨在探讨三相PWM逆变器输出LC滤波器的设计方法,分析滤波器的主要参数对滤波效果的影响,为工程师提供一套实用的滤波器设计流程和指导原则。
本文将首先介绍三相PWM逆变器的基本工作原理和LC滤波器的功能特点,然后详细阐述LC滤波器的设计步骤,包括电感、电容参数的选取,滤波器截止频率的计算等。
接着,本文将通过仿真和实验验证所设计的LC滤波器的性能,分析滤波效果与滤波器参数之间的关系。
本文将总结滤波器设计的关键因素,并给出一些实用建议,以帮助工程师在实际应用中更好地设计和优化LC滤波器。
通过本文的阅读,读者可以全面了解三相PWM逆变器输出LC滤波器的设计原理和方法,掌握滤波器参数的选择和优化技巧,为提升逆变器输出波形质量和电网稳定性提供有力支持。
二、三相PWM逆变器基础知识三相PWM(脉冲宽度调制)逆变器是一种电力电子设备,用于将直流(DC)电源转换为三相交流(AC)电源。
它是许多现代电力系统中不可或缺的一部分,特别是在可再生能源领域,如太阳能和风能系统中。
了解三相PWM逆变器的基础知识是设计其输出LC滤波器的前提。
三相PWM逆变器的基本结构包括三个独立的半桥逆变器,每个半桥逆变器都连接到一个交流相线上。
每个半桥由两个开关设备(通常是绝缘栅双极晶体管IGBT或功率MOSFET)组成,它们以互补的方式工作,以产生所需的输出电压波形。
PWM控制是逆变器的核心。
它涉及快速切换开关设备,以便在平均意义上产生所需的输出电压。
通过调整每个开关设备的占空比(即它在任何给定时间内处于“开”状态的时间比例),可以精确地控制输出电压的大小和形状。
三相PWM逆变器的一个关键特性是它能够产生近似正弦波的输出电压。
三相并网逆变器LCL滤波器的参数设计与研究
三相并网逆变器LCL滤波器的参数设计与研究一、本文概述随着可再生能源的快速发展,三相并网逆变器在电力系统中的应用越来越广泛。
然而,并网逆变器产生的谐波会对电网造成污染,影响电能质量。
为了减小谐波对电网的影响,LCL滤波器被广泛应用于三相并网逆变器中。
LCL滤波器具有优良的滤波性能和高效率,因此,对LCL滤波器的参数设计进行研究具有重要意义。
本文旨在对三相并网逆变器的LCL滤波器参数设计进行全面研究。
介绍三相并网逆变器的基本原理及LCL滤波器的结构和功能;然后,分析LCL滤波器的主要参数(包括电感、电容等)对滤波器性能的影响,建立相应的数学模型;接着,根据电网谐波标准和电能质量要求,提出一种有效的LCL滤波器参数设计方法,并通过仿真和实验验证该方法的可行性和有效性;对LCL滤波器的优化设计和未来发展趋势进行讨论。
本文的研究不仅有助于提升三相并网逆变器的电能质量,还可为相关领域的研究提供有益的参考和借鉴。
二、三相并网逆变器与LCL滤波器的基本原理三相并网逆变器是一种将直流(DC)电源转换为三相交流(AC)电源的设备,主要用于将可再生能源(如太阳能、风能等)生成的直流电转换为适用于电网的交流电。
其核心功能是实现电能的转换与控制,以满足电网对电能质量的要求。
三相并网逆变器通常包括功率开关管、滤波器和控制策略等部分,其中滤波器的设计对于减小逆变器输出电流中的谐波分量,提高电能质量具有关键作用。
LCL滤波器是一种三阶滤波器,由电感(L)、电容(C)和另一个电感(L)组成,其结构特点是在电容两侧各有一个电感。
这种结构使得LCL滤波器在高频段具有较大的阻抗,而在低频段具有较小的阻抗,因此能够有效地滤除逆变器输出电流中的高频谐波分量,同时减小滤波器对逆变器输出电压的影响。
在三相并网逆变器中,LCL滤波器通常连接在逆变器的输出端,用于滤除逆变器输出电流中的谐波分量。
滤波器的设计需要综合考虑滤波效果、系统稳定性、成本等多个因素。
PWM型逆变器输出LC滤波器参数设计

PWM型逆变器输出LC滤波器参数设计PWM型逆变器是一种常用的电力电子装置,用于将直流电转换为交流电。
为了减少输出波形的谐波成分,提高逆变器的输出电压质量,通常需要添加LC滤波器。
LC滤波器是一种由电感器和电容器组成的滤波电路,通过电感和电容的频率特性来滤除高频噪音和谐波。
在设计PWM型逆变器的LC滤波器时,需要考虑多个参数,包括输出电压的纹波、电感和电容的数值以及滤波器的品质因数。
下面将分别介绍这些参数的设计方法。
首先,输出电压纹波是指逆变器输出电压中的交流成分的大小。
为了减小纹波,可以选择合适的电感器和电容器的数值以及滤波电路的拓扑结构。
比较常用的拓扑结构包括陷波器型、π型和T型滤波器。
在选择电感器的数值时,可以根据预期的输出波形纹波来计算。
通常,输出电压的纹波量可以用下式计算:Vr=(ΔI/(2*f*c))其中,ΔI是负载电流的变化量,f是交流成分的频率,c是输出电容器的数值。
根据计算结果选择合适的电感器数值,使得输出电压纹波在可接受范围内。
接下来是选择输出电容器的数值。
输出电容器的数值决定了滤波器的截止频率,即滤波器开始对高频噪声和谐波进行滤除的频率。
为了保证滤波效果,输出电容器的数值应该与电感器的数值匹配。
通常可以使用下式计算输出电容器的数值:C=(ΔI/(2*f*Vr))其中,ΔI是负载电流的变化量,f是交流成分的频率,Vr是输出电压的纹波量。
根据计算结果选择合适的输出电容器数值。
最后需要考虑滤波器的品质因数。
品质因数是滤波器的一个重要指标。
它表示滤波器对输入信号的衰减程度,品质因数越高,滤波效果越好。
品质因数可以通过以下公式计算:Q = 1 / (R * sqrt(LC))其中,R是滤波器的阻抗,L是电感器的数值,C是电容器的数值。
根据计算结果选择合适的品质因数。
综上所述,PWM型逆变器输出LC滤波器参数的设计包括选择合适的电感器和电容器数值以及滤波器的品质因数。
这些参数的选择应该考虑输出电压纹波、滤波器的截止频率和滤波效果,以提高逆变器输出电压的质量。
逆变器滤波器参数设置
逆变器滤波器参数设置 Revised by Chen Zhen in 20211滤波特性分析输出滤波方式通常可分为:L 型、LC 型和 LCL 型,滤波方式的特点比较如下:(1)中的单 L 型滤波器为一阶环节,其结构简单,可以比较灵活地选择控制器且设计相对容易,并网控制策略不是很复杂,并网容易实现,是并网逆变器常用的滤波方式。
缺点在于其滤波能力有限,比较依赖于控制器的性能。
(2)中的 LC 型滤波器为二阶环节, C 的引入可以兼顾逆变器独立、并网双模式运行的要求,有利于光伏系统功能的多样化。
然而,滤波电容电流会对并网电流造成一定影响。
(3)中的 LCL 型滤波器在高频谐波抑制方面更具优势,在相同高频电流滤波效果下,其所需总电感值较小。
但因为其为三阶环节,在系统中引入了谐振峰,必须引入适当的阻尼来削减谐振峰,这就导致了其控制策略复杂,系统稳定性容易受到影响。
当三相光伏逆变器独立运行时,一般均采用 LC 型滤波方式。
并网逆变器的滤波器要在输出的低频段(工频 50Hz)时要尽量少的衰减,而要尽量衰减输出的高频段(主要是各次谐波)。
采用伯德图来分析各种滤波器的频域响应。
[1]一般并网逆变器滤波部分的电感为毫亨级,电容为微法级,这里电感值取 1m H,电容取 100u F,电感中的电阻取Ω,在研究 LCL滤波器时,取电感值为 L1=L2= H,电阻R1=R2=Ω。
对于单电感滤波器,以输入电压和输出电流为变量,并且实际的电感中含有一定电阻,其传递函数为:对于采用 LC 滤波器的并网逆变器,在并网运行时,电网电压直接加在滤波器中的电容两端,因此此时电容不起滤波作用,可以看作是一个负载,从滤波效果上来说,它等同于单电感滤波器。
并且对于被控量选取为电感电流IL 的采用 LC滤波的并网逆变器,由于有电容的作用,其控制电流IL与实际输出电流Io 之间有如下图所示:上式中可以看出,电感电流LI 将受到电网电压gU 的变化与并网电流0I 的影响。
三相PWM逆变器输出LC滤波器设计方法
三相PWM逆变器输出LC滤波器设计方法何亮;王劲松【摘要】为了使脉冲宽度调制(PWM)逆变器具有较好的输出交流波形,针对PWM 逆变器输出交流波形中谐波次数较高的特点,采用二阶LC低通滤波器.从逆变器无功容量较小、传输效率较高、系统稳定性较好等角度,介绍了一种三相PWM逆变器输出交流LC滤波参数的设计方法.实际工程应用较好验证了该设计方法的可行性.【期刊名称】《电气传动》【年(卷),期】2013(043)012【总页数】4页(P33-36)【关键词】LC滤波器;设计方法;逆变器;脉冲宽度调制【作者】何亮;王劲松【作者单位】中国核动力研究设计院核反应堆系统设计技术重点实验室,四川成都610041;中国核动力研究设计院核反应堆系统设计技术重点实验室,四川成都610041【正文语种】中文【中图分类】TM461 引言基于脉冲宽度调制(PWM)技术的逆变器广泛应用于各型变频及电能变换装置中。
由于PWM调制技术自身的技术特性,决定了逆变器输出交流电力中含有较多的高次谐波分量,该类谐波分量的存在将直接影响交流电力品质,因而,必须在逆变器输出侧设置交流低通LC滤波器,以优化交流电力品质,在充分研究LC滤波器对逆变器传输效率及系统稳定性影响的基础上,提出了一种三相逆变器输出LC型滤波器设计方法。
2 逆变器输出交流谐波分析PWM逆变器输出交流谐波呈如下特点:1)谐波分量以角频率(nωC±kω1)分组分布在输出交流频谱中,其中ωC为载波角频率,ω1为信号波角频率,n,k为谐波系数;2)每组谐波以载波角频率nωC为中心,边频为kω1分布其两侧,其幅度两侧对称衰减;3)随着载波角频率ωC的不断增加,谐波频谱将整体向较高频带上移动[1-2]。
通过上述交流谐波分析,根据交流用电设备对电力品质的相关要求,结合LC滤波器的结构简洁、高频谐波抑制效果较好等技术特点,采用低通LC型滤波器实现逆变器输出交流电力品质优化为最佳方式。
三相逆变电路滤波器设计

三相逆变电路滤波器设计
三相逆变电路滤波器设计指的是为三相逆变电路设计一种滤波器,用于滤除逆变器输出电流或电压中的谐波分量,得到较为理想的正弦波输出。
以下是一些示例:
1.LC滤波器:由电感和电容组成,可以对一定频率范围内的谐波进行滤波。
对于三相逆变电路,可以设计三个LC滤波器分别对三相输出进行滤波。
2.输出滤波器:通常采用电感和电容的组合,用于减小逆变器输出电流和电
压中的谐波分量。
常用的输出滤波器包括π型滤波器和T型滤波器等。
3.多重化滤波器:通过将多个逆变器或变压器进行串联或并联,以增加输出
电压或电流的相位数,从而减小谐波分量。
这种滤波器适用于大功率场合,但电路复杂度和成本较高。
总之,三相逆变电路滤波器设计旨在减小逆变器输出电流或电压中的谐波分量,得到较为理想的正弦波输出。
在实际应用中,根据具体的逆变器和系统要求,选择适合的滤波器类型和参数进行设计,以达到最优的性能指标。
PWM型逆变器输出LC滤波器参数设计 自己 的

目录
1.LC滤波器设计原则
1.1. 原则1
输出额定电流时,电抗器上电压降应该小于额定输出电压的10%。
即满足:
ωLI N≤10%U N
1.2. 原则2
滤波电容上损耗的电流应该小于额定输出电流的10%。
即满足:
ωCU0≤10%I N
1.3. 原则3
LC滤波器截止频率应该远小于输出交流的最低次谐波频率,并且远大于基波频率,一般取1/10到1/5的载波频率。
f s 10<f L<
f s
5
2.设计步骤
2.1. 计算电抗器电感值
根据原则1计算电抗器的电感值,一般取
ωCU0≤10%I N
以保证滤波效果。
2.2. 选择截止频率
根据原则2选取LC滤波器的截止频率f L。
2.3. 计算滤波电容
根据计算出的电感和选取的截止频率,计算电容值。
截止频率公式为:
f L=
1
2π√LC
可以得到
C=1
L
ωL2,式中,角频率ωL=2πf L
电容的基波电流参数可以由下式计算:
I C=ω1CU O 式中,ω1是基波角频率,U O是额定输出电压。
并网逆变器滤波器的设计

多功能集成
自适应滤波算法的应用将使滤波器能够更 好地适应电网和负载的变化。
未来滤波器可能会集成更多的功能,如无 功补偿、有功滤波等,以满足多样化的需 求。
新型滤波器及其在并网逆变器中的应用前景
新型滤波器
近年来,一些新型的滤波器如自适应滤波器、全数字滤波器等逐渐受到关注。这些新型滤波器具有更 高的性能和更低的成本,未来在并网逆变器中具有广阔的应用前景。
兼容性问题
不同地区和国家的电网标准和规定不 同,如何设计出兼容性强的滤波器也 是一个挑战。
未来滤波器技术的发展趋势
新型材料的应用
数字化控制
随着新材料的发展,未来滤波器可能会采 用新型的磁性材料和绝缘材料,以提高性 能和降低成本。
数字化控制技术的发展将进一步提高滤波 器的性能和响应速度。
自适应滤波算法
滤波器可以提供无功补偿功能, 对电网进行无功调节,提高电 网的功率因数。
滤波器可以抑制电网中的电磁 干扰,保护并网逆变器和电网 设备免受电磁干扰的影响。
滤波器在提高并网逆变器效率中的作用
滤波器可以减小并网电流的畸变,降低逆变器的损耗和温升,提高逆变器的效率。 滤波器可以减小线路阻抗对并网逆变器输出的影响,降低能量传输过程中的损失。
应用前景
新型滤波器的应用将进一步提高并网逆变器的性能和稳定性,降低对电网的谐波影响,提高系统的能 效和可靠性。同时,新型滤波器的应用也将推动相关产业的发展和进步。
THANKS FOR WATCHING
感谢您的观看
储能系统
并网逆变器也可用于储能系统的能量转换,将电池、超级电容等储能设备的直流电能转换为交流电能,实现储能 设备的并网运行。
并网逆变器的发展趋势
高效率与高可靠性
大容量光伏逆变器LCL滤波器参数优化设计
第 41 卷 第 21 期 2013 年 11 月 1 日
Power System Protection and Control
电力系统保护与控制
Vol.41 No.21 Nov.1, 2013
大容量光伏逆变器 LCL 滤波器参数优化设计
黄亚峰 1,李 龙 2,严干贵 2,王泽辉 2
(1.华北电力大学,北京 102206;2.东北电力大学,吉林 吉林 132012) 摘要:对于大容量联网光伏逆变器系统,其配置的 LCL 滤波器总电感量大小直接关系到系统的尺寸和成本。为此,提出了一 种根据滤波性能要求,使总电感量最小的 LCL 参数优化设计方法。该方法以电容支路消耗无功大小,注入电网谐波电流与对 应频次谐波电压幅度比作为滤波器性能考核参数。通过引入电容支路与网侧电感支路对高频谐波电流的分流比参数,建立了 总电感量与主要设计参数之间的函数关系,给出了总电感量最小的参数条件及其求解方法。设计算例及仿真结果验证了所提 出设计方法的实用性与有效性。 关键词:光伏逆变器; LCL 滤波器;谐波抑制;参数优化
滤波器参数设计(修正版)
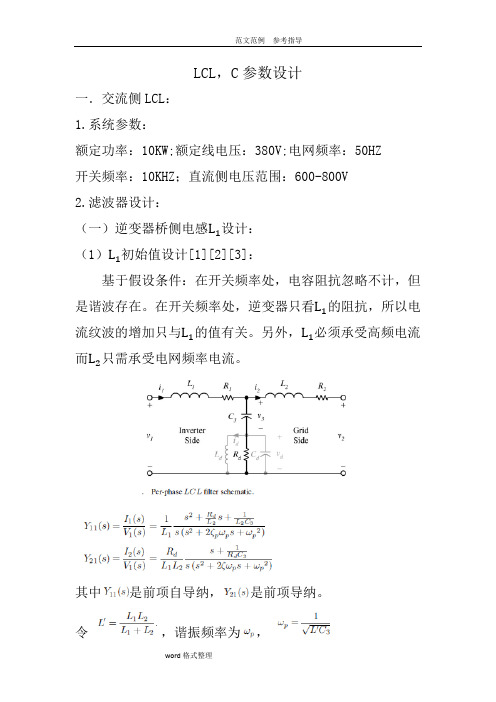
LCL,C参数设计一.交流侧LCL:1.系统参数:额定功率:10KW;额定线电压:380V;电网频率:50HZ开关频率:10KHZ;直流侧电压范围:600-800V2.滤波器设计:(一)逆变器桥侧电感设计:(1)初始值设计[1][2][3]:基于假设条件:在开关频率处,电容阻抗忽略不计,但是谐波存在。
在开关频率处,逆变器只看的阻抗,所以电流纹波的增加只与的值有关。
另外,必须承受高频电流而只需承受电网频率电流。
其中是前项自导纳,是前项导纳。
令,谐振频率为,对于七段式SVPWM,电感纹波电流为[6]:其中m为调制比。
SVPWM调制比定义为:(为相电压峰值,为直流侧电压)。
为避免过调制,合成矢量最大值为六边形内切圆半径,因此调制比m≤0.866,此时≥539V;当直流侧电压为800V时,m=0.583。
考虑直流侧电压范围在:538.9V-800V时,调制比m的范围是:0.583≤m≤0.866.(600V对应调制比m=0.778) 当考虑三相电网电压波动为20%时,范围是:248.9V—373.4V,此时调制比范围是:0.467≤m≤0.866(如果为373.4V且直流侧电压为600V时,调制比为0.933。
当调制比为0.866时,直流侧最低电压为646.7V)当m=0.5时,纹波电流取得最大值,且为(为直流侧额定电压,为开关周期,为逆变桥侧电感)。
一般情况下,纹波电流为15%~25%的额定电流。
在LCL滤波器中,可允许电流纹波最大值对逆变桥侧的电感L的体积大小和成本有很大的影响。
电流纹波意味着对磁芯材料的和尺寸厚度选择来避免磁饱和以及减少因线圈和磁芯损耗而产生的热量。
然而,电流和电压的限制条件之间的取舍还不清楚,但是电流纹波最大值受到IGBT额定电流和IGBT散热所限制,而最小纹波电流受到直流侧电压和IGBT额定电压限制。
[3]因此,考虑IGBT最大发热情况,选择最大纹波电流为25%额定电流。
即。
电感有最小值=1.8mH(2)电感值修正[3]:由上面算出来的电感是基于假设条件得出,如果开关频率较低,即谐振频率和开关频率特别接近时,需要修正。
三相并网逆变器LCL滤波器的参数设计方法

三相并网逆变器LCL滤波器的参数设计方法冯家铨;陈堂贤【摘要】目前,国内外对LCL型滤波器参数设计的研究正在进行中,但是这些研究并不适用于空间矢量脉冲宽度调制(Space Vector Pulse WidthModulation,SVPWM),针对三相并网逆变系统中的开关动作方案,提出一种适用于SVPWM的三相并网逆变器LCL型滤波器的参数设计方法,并介绍一种针对SVPWM进行优化的LCL型滤波器的设计方法.通过开关状态对电网侧电流的纹波分量进行数学分析,得到逆变器侧电感参数,根据无功功率吸收比来选择滤波电容器参数,利用输出电流纹波衰减系数对电网侧电感参数进行设计.将测得的实际电流的畸变率与目标电流的畸变率进行比较,所得的误差在允许的范围内,验证了所提出方法的可行性,并通过仿真验证了该LCL型滤波器设计方法的有效性.【期刊名称】《电力科学与工程》【年(卷),期】2019(035)002【总页数】6页(P44-49)【关键词】空间矢量脉宽调制;LCL型滤波器;纹波分量【作者】冯家铨;陈堂贤【作者单位】三峡大学电气与新能源学院,湖北宜昌443002;三峡大学电气与新能源学院,湖北宜昌443002【正文语种】中文【中图分类】TM7430 引言近来,为了取代化石能源和核能,人们越来越关注太阳能和风能等可再生能源。
可再生能源,如太阳能的主要利用方式是光伏并网发电,而光伏并网发电的核心装置是并网逆变器。
然而,逆变器的输出电流不仅具有基波,而且具有开关频率的整数倍的谐波[1]。
谐波分量受到诸如IEEE-519和IEEE-1547等标准的限制。
为了满足标准,L型滤波器已经被广泛运用在并网系统中,但是如果系统的容量增加,L型滤波器的容量也要相应的增加来减少谐波分量,这样会导致滤波器的尺寸和价格上升。
另外,电感增大会对动态响应速度和电压造成影响。
另一方面,LCL型滤波器可以降低滤波器的成本和体积。
而且LCL型滤波器的谐波降低效果要好于L型滤波器。
PWM型逆变器输出LC滤波器参数设计自己的资料

PWM型逆变器输出LC滤波器参数设计自己的资料PWM型逆变器是一种将直流电源转换为交流电源的电子装置。
它通过将直流电源转换为高频脉冲信号,然后使用逆变器将这些脉冲信号转换为交流电源。
PWM型逆变器的输出需要经过LC滤波器进行滤波,以消除脉冲信号的高频成分,使输出信号更接近理想的正弦波。
在设计PWM型逆变器输出LC滤波器的参数时,需要考虑以下几个方面:1.输出电流和负载电阻:首先确定所需的输出电流和负载电阻,以便确定滤波器的工作范围和额定电流。
2.输出电压波形:确定所需的输出电压波形,通常是正弦波或近似正弦波。
根据电压波形的要求,选择合适的滤波器参数。
3.输出电压纹波:确定所需的输出电压纹波的允许范围,以便选择合适的滤波器参数。
电压纹波较小时,滤波器的容值可以选择较小,电压纹波较大时,则需要选择较大的容值。
4.带宽:确定所需的输出信号的带宽,以便选择合适的滤波器参数。
带宽较小时,滤波器的电感值可以选择较大,带宽较大时,可以选择较小的电感值。
5.输出功率:确定所需的输出功率,以便选择合适的滤波器参数。
输出功率较大时,需要选择耐压较高的元件。
在滤波器设计中,可以使用以下公式来计算LC滤波器的参数:C = 1 / (2 * π * fc * L)其中,C为滤波器的电容值,L为滤波器的电感值,fc为滤波器的截止频率。
根据以上考虑,设计PWM型逆变器输出LC滤波器的参数的具体步骤如下:1.确定所需的输出电流和负载电阻。
根据负载电阻和输出电流计算滤波器的额定电流。
2.确定所需的输出电压波形。
根据输出电压波形的要求,选择合适的滤波器参数。
3.确定所需的输出电压纹波。
根据输出电压纹波的允许范围,选择合适的滤波器参数。
4.确定所需的输出信号带宽。
根据输出信号的带宽要求,选择合适的滤波器参数。
5.确定所需的输出功率。
根据输出功率的大小,选择耐压合适的元件。
6.根据以上参数,计算滤波器的电感值和电容值。
7.选择合适的滤波器元件,如电感、电容等。
并网逆变器LCL滤波器参数优化设计
并网逆变器LCL滤波器参数优化设计
朱晓琳;庞科旺
【期刊名称】《电气自动化》
【年(卷),期】2022(44)1
【摘要】针对传统试凑法并网LCL滤波器参数设计存在的步骤复杂、工程计算困难且参数性能优化较差等问题,在分析其数学模型的基础上,根据逆变器并网要求列出滤波器各参数的约束条件,提出了一种改进人工蜂群算法,通过引入罚函数进行约束并加入单纯形法改进蜂群算法的局部寻优能力,用来优化设计LCL滤波器参数。
通过对MATLAB/Simulink设计实例的仿真,验证了该设计方法的有效性,为工程计算提供合理的设计依据。
【总页数】4页(P111-114)
【作者】朱晓琳;庞科旺
【作者单位】江苏科技大学电子信息学院
【正文语种】中文
【中图分类】TN713
【相关文献】
1.光伏并网逆变器LCL滤波器参数优化设计
2.一种并网逆变器LCL滤波器参数优化方法
3.一种并网逆变器LCL滤波器参数优化方法
4.并网逆变器LCL滤波器的参数优化设计
5.基于非线性规划遗传算法的并网逆变器LCL滤波器参数优化研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1滤波特性分析输出滤波方式通常可分为:L 型、LC 型和LCL 型,滤波方式的特点比较如下:(1)中的单L 型滤波器为一阶环节,其结构简单,可以比较灵活地选择控制器且设计相对容易,并网控制策略不是很复杂,并网容易实现,是并网逆变器常用的滤波方式。
缺点在于其滤波能力有限,比较依赖于控制器的性能。
(2)中的LC 型滤波器为二阶环节,C 的引入可以兼顾逆变器独立、并网双模式运行的要求,有利于光伏系统功能的多样化。
然而,滤波电容电流会对并网电流造成一定影响。
(3)中的LCL 型滤波器在高频谐波抑制方面更具优势,在相同高频电流滤波效果下,其所需总电感值较小。
但因为其为三阶环节,在系统中引入了谐振峰,必须引入适当的阻尼来削减谐振峰,这就导致了其控制策略复杂,系统稳定性容易受到影响。
当三相光伏逆变器独立运行时,一般均采用LC 型滤波方式。
并网逆变器的滤波器要在输出的低频段(工频50Hz)时要尽量少的衰减,而要尽量衰减输出的高频段(主要是各次谐波)。
采用伯德图来分析各种滤波器的频域响应。
[1]一般并网逆变器滤波部分的电感为毫亨级,电容为微法级,这里电感值取1m H,电容取100u F,电感中的电阻取0.02Ω,在研究LCL滤波器时,取电感值为L1=L2=0.5m H,电阻R1=R2=0.01Ω。
对于单电感滤波器,以输入电压和输出电流为变量,并且实际的电感中含有一定电阻,其传递函数为:对于采用LC 滤波器的并网逆变器,在并网运行时,电网电压直接加在滤波器中的电容两端,因此此时电容不起滤波作用,可以看作是一个负载,从滤波效果上来说,它等同于单电感滤波器。
并且对于被控量选取为电感电流IL 的采用LC滤波的并网逆变器,由于有电容的作用,其控制电流IL与实际输出电流Io 之间有如下图所示:上式中可以看出,电感电流LI 将受到电网电压gU 的变化与并网电流0I 的影响。
所以在控制过程中要参照电网电压的有效值不断调整基准给定的幅值与相位。
对于LCL 滤波电路,逆变器输出电流与输入电压之间的传递函数可以表示为:对比可知,可以很清楚的看到,在低频时,单L 型滤波器与LCL 型滤波器的频域响应相同,都是以20d B/dec 的斜率进行衰减。
但在高频部分,单L型滤波器仍然以20d B/dec 进行衰减,但LCL 型滤波器以60d B/dec 的斜率进行衰减,表明相对于单L 型滤波器,LCL 型滤波器能够更好地对高频谐波进行衰减。
将式中的s 用jω代入后可以看出,低频时两式分母中含有ω的项都很小,特别是ω的高次方项,可以忽略不计。
因此在低频时,表达式中主要起作用的是电阻部分。
而随着ω的不断上升,两式分母中含有ω的项不断增大,特别是含有ω的高次方项,因此在高频段,其主要作用的是分母中含有ω的 3 次方项。
因此在高频段,LCL 滤波器是以60d B/dec 的斜率进行衰减。
对单L 型、LC 型及LCL 型滤波器进行比较。
在低频时,三者的滤波效果相同,并且在并网运行时LC 型滤波器中的电容只相当于负载,不起滤波作用。
而LCL 型滤波器对高频谐波的滤波效果要优于单L 型与LC 型滤波器。
2数学模型2.1L型滤波器2.2LC滤波器2.2.1LC滤波器数学模型这里选择电感电流、电容C2电压为状态变量,在三相平衡的情况下列出A、B、C 三相的状态方程为:dq轴下的数学方程为:则数学模型为:2.2.2控制器设计[1-5]解耦控制为[6]:在dq坐标系下的电流状态方程存在交叉耦合关系,为了降低控制器的设计复杂程度,首先要进行前馈解耦控制:引入输出滤波电感电压和负载电压前馈解耦,在电压外环采用输出滤波电容电流和负载电流前馈解耦。
当逆变器工作在独立模式时,通过控制逆变器输出 LC 型滤波器滤波电容上电压使逆变器工作在电压源模式。
LC 型的控制框图如图。
电容输出电压 uc 与输入电压 ui 以及负载电流il 的关系式如式:将负载电流 il 当做扰动处理,得出电容电压 uc 到输入电压 ui 环节的传递函数:作出上式波特图,图中可看出LC 型滤波器的系统为一个典型的二阶系统,在谐振频率处也存在一个很大的谐振峰,在谐振频率处,系统的相位裕度大大降低。
逆变器电压电流双环控制根据电流内环控制对象不同,一般可以分为:电压外环电感电流内环控制和电压外环电容电流内环控制。
[3] 双环控制方案中的电流内环用来增大系统的带宽,提高系统的动态响应水平,电压外环来保证电压质量。
aref u 为电压指令信号,err u 为电压误差信号,aref i 内环电感电流指令信号,err i 为电流误差信号,am u 为调制控制信号,a i 为滤波电感电流,ca i 为滤波电容电流,oa i 为负载电流,oa u 为输出电压, L 为滤波电感量,r 为等效电阻,C 为滤波电容量,G1(s) 为电压调节器,G2(s) 为电流调节器。
Figure 2-1 电压外环电感电流内环上图所示控制方案可以在电流内环指令值处增加限幅环节对开关管进行限流保护。
但是,由于负载电流i扰动在电流内环之外,这削弱了其抗负载扰动的oa能力。
因此可在方案中增加负载电流前馈控制来提高逆变器的抗扰动能力。
α为前馈系数,当其取值为1 时,相当于电压外环电容电流内环控制,控制框图如图所示。
电容电流内环不能对逆变器提供限流保护,实际应用中须增加额外的措施来对逆变器进行过流保护,这增加了系统的复杂性。
Figure 2-2 电压外环电容电流内环控制系统设计完成后,需要对控制器参数进行整定。
工程上,系统的参数整定有多种方法,本设计中采用极点配置法。
极点配置法的主要思想是:若已知某系统的模型或者传递函数,通过引入某种控制器,使该系统的闭环极点能够移动到指定的位置,从而改善系统的动态性能。
不同性质的负载时控制框图不同[4]对于双环控制系统应从其内环开始进行参数设计。
内环电流环控制的主要目的是使系统具有良好的稳定性,并且具有较快的动态响应。
忽略并网电流,采用瞬时电压电流双环控制的 SPWM 并网逆变器电流内环的结构如下图所示:未加入校正环节前的开环传函为:()()(1)(1)pwmI pwm K G s sL R T s T s =+++开关管等效一阶惯性环节为:11pwm T s + ,PWM K表示桥路等效增益,TI 为电流采样时间常数。
由于 SPWM 开关频率较高,Tpwm 很小,因此可以将其忽略。
开环传递函数可以等效为:()()(1.51)pwmI K G s sL R T s =++电流环的作用是提高逆变器的动态响应,并具有限制输出电流的能力,提高系统的可靠性,采用PI 调节器。
2222221()I p p K s G s K K s ττ+=+= 电流环的开环传递函数为:22221211() 1.511(1.51)()pwm oi p I p pwmI K s W s K s T s sL RK K s s T s sL R ττττ+=+++=++按照Ⅱ型系统设计电流内环调节器。
当c L R ω? 时(c ω为电流环截止频率),可令:111()1R sL R L R s Ls=≈++ 则:22222211()(1.51)(1.51)p pwmoi I I K K s s W s KL s T s s T s τττ++==++对于典型Ⅱ系统,可设计适当的中频带宽h 。
中频宽是衡量二型系统性能指标的一个非常重要的参数。
为了使系统有良好的动态性能,希望系统的幅频特型曲线以-20d B/dec 穿过0d B 线。
中频宽 h 表示了二型系统的幅频特性曲线以-20d B 斜率下降的宽度,其值为:21.5Ih T τ=工程上常取h=5。
根据“震荡指标法”,对于二型系统,在 h 的值一定的情况下,只有一个确定的参数 K ,使得其闭环参数的幅频特性为最小峰值,其表达式为:222212p pwmK K h K L ττ+==可求得:2226156112.5p I pwmI I pwmL K T K LK T K ==为了保证电流环能够对谐波进行较好的抑制,电流环的开环转折频率应小于 SPWM 开关频率的 1/5 ,并且对基波有较大的增益,转折频率要大于基波频率的 10 倍。
闭环传递函数中分母中的高次项的系数s T 很小,为了便于电压外环参数设计,在此将其忽略不计,带入参数后,电流环的闭环传递函数可以化简为:1()31ci I W s T s =+对电压外环校正的主要目的是使系统在低频段有较高增益,以减小系统稳态误差,并且能够抑制扰动,因此采用比例积分控制器进行校正。
将电流环化简后,电压环的结构如下图所示:其开环传递函数为:112()(1)(31)P Iov V I K s K W s Cs T s T s +=++ 式中V T 为电压采样时间常数,11,P I K K 分别为 PI 调节器的比例和积分参数。
这里设电压采样频率与电流采样频率相同,考虑到电压采样的惯性时间V T 和电流环等效惯性环节的时间常数都很小,因此电压外环开环传递函数可以化简为:112()(41)P Iov I K s K W s Cs T s +=+比照典型二型系统传递函数:2(1)()(1)ov K s W s s Ts τ+=+ 对应有:111;;4I P I IK KK T T C K τ=== 中频宽度越宽h Tτ=,系统的超调量越小,但是其动态降落、回复时间等动态抗干扰性能降低。
一般工程设计时取折中值,即 h=5。
据“震荡指标法”,对于二型系统,在 h 的值一定的情况下,只有一个确定的参数 K ,使得其闭环参数的幅频特性为最小峰值,其表达式为:2212h K h T +=最终可求得:1120.60.12;416P I I IC CK K T T == 最终形成控制框图:文献[5]2.2.3 滤波器参数设计LC 滤波器的截止频率为:2.3LCL滤波器2.3.1LCL滤波器数学模型[7]这里选择L1电感电流,电容C2电压以及并网电感L2上的电流为状态变量,在三相平衡的情况下列出A、B、C 三相的状态方程为:则dq坐标下的数学模型为:所示的LCL 滤波器的在dq 坐标系下的数学模型。
旋转3/2 变换在系统的d 轴和q 轴之间引入了强耦合,d、q 轴电流除受控制量ud和uq影响外,还受耦合电压ωL1iq 、ωL2 iq 、-ωL1id 、-ωL2id 和耦合电流ωC 2ucq、-ωC 2ucd以及电网电压usd 、usq 的影响。
如果不对d 轴和q 轴进行解耦控制,采用电流闭环控制时 d 轴和q 轴的电流指令跟踪效果不是很理想。
根据图所示的系统拓扑结构图可以推得并网输出电流I2同逆变桥输出Uk以及电网电压Us的控制结构框图如下:根据图所示的滤波器控制结构图,可以推导出并网电流I2与逆变桥输出Uk 之间的传递函数为:由公式可见,这是一个双输入,单输出的三阶线性系统,选取滤波电感L1,并网电感L2电流以及滤波电容电压Uc 为状态变量,Us作为系统的输入,其中将Us作为系统的一个扰动输入量。