8毫米波测距雷达设计
毫米波雷达角度范围

毫米波雷达角度范围
毫米波雷达是一种利用毫米波频段进行探测和测距的雷达系统。
它具有高精度、高分辨率和抗干扰能力强的特点,被广泛应用于军事、民用和科学研究等领域。
在毫米波雷达中,角度范围是一个重要的参数,它决定了雷达能够覆盖的区域范围。
毫米波雷达的角度范围通常是由雷达天线的设计和工作频率决定的。
在设计雷达天线时,需要考虑到天线的指向性、波束宽度和辐射功率等因素。
通常情况下,毫米波雷达的角度范围可以分为水平角度范围和垂直角度范围两个方面。
在水平角度范围方面,毫米波雷达可以实现全方位的扫描和探测。
通过调整天线的指向性和波束宽度,可以实现对不同角度的目标进行探测和测距。
水平角度范围通常在0度到360度之间,可以覆盖整个水平方向上的区域。
在垂直角度范围方面,毫米波雷达可以实现对不同高度目标的探测和测距。
通过调整天线的仰角,可以实现对不同高度目标的覆盖。
垂直角度范围通常在-90度到90度之间,可以覆盖从地面到天空的区域。
毫米波雷达的角度范围对于实际应用非常重要。
在军事领域,角度范围决定了雷达的侦察范围和探测能力,对于敌方目标的追踪和定位起着关键作用。
在民用领域,角度范围决定了雷达的监测范围和
安全性能,对于交通管理、安防监控等方面有着重要意义。
在科学研究领域,角度范围决定了雷达的观测范围和精度,对于地球观测、天文观测等方面有着重要作用。
毫米波雷达的角度范围是一个重要的参数,它决定了雷达的覆盖范围和探测能力。
合理的设计和调整角度范围可以提高雷达的性能和应用效果。
毫米波雷达的角度范围是一项关键技术,它在各个领域都有着广泛的应用前景。
毫米波雷达测距算法
毫米波雷达测距算法一种常见的毫米波雷达测距算法是时差测距算法。
该算法通过测量信号在发送和接收之间的时间差,然后根据光速计算出目标与雷达之间的距离。
该算法的基本原理是,雷达发射一个短脉冲信号,然后接收到该信号的回波。
通过测量回波信号的到达时间,就可以确定目标与雷达之间的距离。
时差测距算法的关键是测量到达时间。
为了准确测量到达时间,可以使用高速时钟来记录信号的发送和接收时间。
这需要雷达系统具备高精度的时钟同步,以确保测量结果的准确性。
此外,还需考虑信号传输的延迟,例如信号在电缆中传播的时间等。
另一种常见的毫米波雷达测距算法是相位测距算法。
该算法通过测量信号的相位变化来计算目标与雷达之间的距离。
相位测距算法的基本原理是,雷达发射一个持续波信号,然后接收到该信号的回波。
通过测量回波信号与发射信号之间的相位差,就可以确定目标与雷达之间的距离。
相位测距算法的关键是测量相位差。
为了准确测量相位差,可以使用高精度的相位锁定环路(PLL)或频率合成器来保持发射信号和接收信号的相位同步。
此外,还需考虑信号的多径效应,即信号在传播过程中通过不同路径到达的影响。
除了时差测距算法和相位测距算法,还有其他一些常见的毫米波雷达测距算法,例如基于脉冲压缩技术的测距算法,基于多普勒效应的测距算法等。
这些算法通过不同的信号处理技术来提高测距的精度和可靠性。
总的来说,毫米波雷达测距算法是通过测量信号的时间延迟或相位变化来计算目标与雷达之间的距离。
不同的算法可以根据信号处理技术的不同,提供不同精度和可靠性的测距结果。
在实际应用中,需要根据具体的需求和环境条件选择合适的测距算法。
毫米波雷达标准
毫米波雷达标准
毫米波雷达标准是指用于毫米波雷达系统的技术规范和规则。
毫米波雷达是一种利用毫米波频段的电磁波进行探测和测距的雷达系统。
以下是一些常见的毫米波雷达标准:
1. IEEE 80
2.15.3c:这个标准是用于无线个人区域网络(WPAN)的毫米波雷达系统的技术规范。
它定义了在60
GHz频段进行高速通信的技术要求和性能指标。
2. FCC Part 15.253:美国联邦通信委员会(FCC)发布的关于
毫米波雷达设备的规定。
该规定规定了操作频率、功率限制、发射模式、频谱扫描和频谱利用等方面的限制。
3. ETSI EN 302 567:这是欧洲电信标准协会(ETSI)发布的
关于车辆雷达系统的技术规范。
该规范规定了车辆雷达系统在77 GHz频段的工作要求、频率规划和电磁兼容性等方面的要求。
4. ISO 21814:这是国际标准化组织(ISO)发布的关于车辆雷达系统的标准。
它规定了车辆雷达系统的技术要求和测试方法,以确保其功能和性能符合预期。
这些标准和规范的制定旨在确保毫米波雷达设备的性能稳定、频谱利用合理、电磁兼容性良好,并促进全球范围内的互操作性和通信标准化。
一种8mm交通雷达前端设计
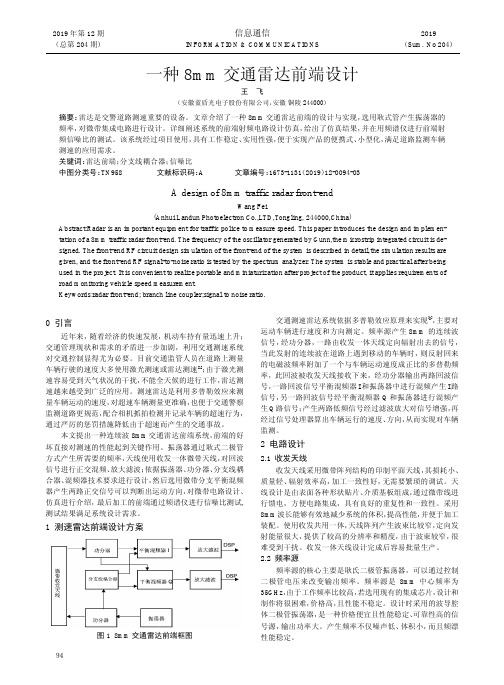
94一种8mm 交通雷达前端设计王飞(安徽蓝盾光电子股份有限公司,安徽铜陵244000)摘要:雷达是交警道路测速重要的设备。
文章介绍了一种8mm 交通雷达前端的设计与实现,选用耿式管产生振荡器的频率,对微带集成电路进行设计。
详细阐述系统的前端射频电路设计仿真,给出了仿真结果,并在用频谱仪进行前端射频信噪比的测试。
该系统经过项目使用,具有工作稳定、实用性强,便于实现产品的便携式、小型化,满足道路监测车辆测速的应用需求。
关键词:雷达前端;分支线耦合器;信噪比中图分类号:TN958文献标识码:A 文章编号:1673-1131(2019)12-0094-03A design of 8mm traffic radar front-endWang Fei(Anhui Landun Photoelectron Co.,LTD,Tongling,244000,China )Abstract:Radar is an important equipment for traffic police to measure speed.This paper introduces the design and implemen-tation of a 8mm traffic radar front-end.The frequency of the oscillator generated by Gunn,the microstrip integrated circuit is de-signed.The front-end RF circuit design simulation of the front-end of the system is described in detail,the simulation results are given,and the front-end RF signal-to-noise ratio is tested by the spectrum analyzer.The system is stable and practical after being used in the project.It is convenient to realize portable and miniaturization after project of the product,it applies requirements of road monitoring vehicle speed measurement.Keywords:radar front-end;branch line coupler;signal to noise ratio.0引言近年来,随着经济的快速发展,机动车持有量迅速上升;交通管理现状和需求的矛盾进一步加剧,利用交通测速系统对交通控制显得尤为必要。
毫米波雷达校准方案
毫米波雷达校准方案一、校准前准备。
1. 工具大集合。
咱们得先把要用的工具都找齐咯。
就像厨师做菜得先备齐调料和厨具一样。
需要有高精度的测量仪器,比如激光测距仪,这可是咱们校准的小助手。
还得有专门的校准工装,这就好比给雷达量身定制的小座椅,让它能稳稳地待着接受校准。
另外,螺丝刀、扳手这些小工具也不能少,有时候可能要对雷达的安装位置做微调呢。
2. 找个好地方。
校准的场地也很重要哦。
要找一个开阔、平坦的地方,没有太多干扰物。
要是周围到处都是大铁架子或者乱七八糟的金属堆,那毫米波雷达肯定要晕头转向,校准出来的结果也不靠谱。
就像人在嘈杂的菜市场里很难集中精力一样,雷达在杂乱的环境里也没法好好校准。
二、雷达安装检查。
1. 安装位置。
先看看毫米波雷达的安装位置对不对。
它就像一个小卫士,要站在合适的位置才能好好站岗。
安装的角度、高度都得符合车辆或者设备的设计要求。
要是安装歪了,就像人歪着脖子看东西,看到的世界肯定是歪的,雷达探测的数据也会不准确。
可以用量角器简单量一量角度,用尺子量一量高度,确保在误差范围内。
2. 连接紧固。
再检查一下雷达的连接线,得确保它们都紧紧地连在雷达和设备上。
如果连接线松松垮垮的,就像电话线断了一样,信号传输肯定会出问题。
就像两个人打电话,线断了还怎么好好聊天呢?用手轻轻拽一拽连接线,要是感觉很松,那就赶紧拧紧螺丝或者重新插好接头。
三、静态校准。
1. 距离校准。
现在开始校准距离啦。
把激光测距仪摆在雷达前面,要摆得正正当当的哦。
先测量出一个已知的准确距离,比如说10米。
然后让毫米波雷达去探测这个距离,看看它测出来的结果是多少。
如果不一样,就像两个人量同一段路得出了不同的长度一样,那就得调整雷达的参数了。
一般雷达都有专门的校准软件或者调节旋钮,可以慢慢地调整,直到雷达测出来的距离和激光测距仪测出来的差不多为止。
这就像把两个时钟的时间调得一样准。
2. 角度校准。
角度校准也很关键呢。
可以在雷达前面放几个有明显角度的目标物,比如说一个斜着放的大板子。
毫米波雷达产品手册
毫米波雷达产品手册
一、产品简介
毫米波雷达,采用毫米波频段的雷达技术,具有体积小、质量轻和空间分辨率高等优点。
本产品手册旨在为用户提供关于毫米波雷达的详细信息和使用指南。
二、产品特点
1. 高精度测距测速:采用先进的毫米波技术,实现高精度测距测速,适用于多种应用场景。
2. 小型化设计:体积小巧,易于集成到各种终端设备中,方便安装和使用。
3. 抗干扰能力强:毫米波具有较强的穿透能力和抗干扰能力,能够在复杂环境中稳定工作。
4. 可靠性高:采用高品质的元器件和严格的生产工艺,确保产品具有高可靠性和稳定性。
三、使用指南
1. 安装与接线
请遵循当地电力安全规范进行安装和使用,确保供电电源满足安全电压标准。
在建筑物安装接线中应装有易于拆卸的断开装置,电源线不要被碾压或踩踏。
2. 操作步骤
(1)打开电源开关,等待雷达启动;
(2)根据实际需求,通过控制面板或遥控器设置参数;
(3)开始检测,观察显示器或接收设备上的数据,确保正常工作。
3. 注意事项
(1)避免在强磁场或电场的环境中使用,以免影响测量精度;
(2)在潮湿、高温、低温等恶劣环境下使用时,应采取相应的防护措施;(3)定期进行设备维护和保养,保证设备的正常运行和使用寿命。
四、常见问题及解决方法
1. 雷达无法启动:检查电源是否正常,检查接线是否牢固。
2. 测量数据不准确:检查雷达是否正确对准目标,检查周围是否有干扰源。
3. 设备发热严重:关闭设备,待其冷却后再使用。
4. 设备故障:如有任何其他问题或故障,请及时联系我们的技术支持团队。
我们将竭诚为您服务。
ti毫米波雷达 距离短一点的波形参数
毫米波雷达技术是一种应用于远距离测距、目标探测和图像成像的高频电磁波技术。
在毫米波雷达技术中,波形参数是指波形在距离短一点时的一些具体参数,包括波形的频率、极化、带宽等。
波形参数的选取对毫米波雷达系统的性能和应用具有重要影响,因此研究和探讨毫米波雷达距离短一点的波形参数是非常有意义的。
一、波形参数的频率选择毫米波雷达波形参数的频率选择需要考虑到大气对电磁波的吸收和散射特性。
在大气透射窗口,毫米波波段主要包括W波段(94GHz)、D波段(130-170GHz)、F波段(220-300GHz)等。
不同的频段在大气传输特性、设备成本、目标分辨率等方面有不同的优势和限制,因此在选择波形参数的频率时需要进行全面考虑。
二、波形参数的极化选择毫米波雷达波形参数的极化选择是指雷达发射的电磁波的极化状态。
主要包括水平极化和垂直极化两种。
在实际应用中,需要根据具体的场景和目标选择合适的极化方式。
水平极化在大气吸收和地物散射方面具有一定的优势,而垂直极化在减小海面散射和抑制多径效应方面有明显效果。
在选择波形参数的极化时需要考虑到实际应用需求和系统性能。
三、波形参数的带宽选择毫米波雷达波形参数的带宽选择是指雷达发射信号的频率范围。
带宽的选择直接影响到雷达系统的分辨率和探测性能。
通常情况下,带宽越大,系统的分辨率越高,对目标的探测能力也越强。
但是带宽较大也会增加系统的复杂性和成本,同时在实际应用中需要考虑到乱射干扰和目标回波信噪比等因素。
因此在选择波形参数的带宽时需要进行综合考虑。
四、波形参数的调制选择毫米波雷达波形参数的调制选择是指雷达发射信号的调制方式。
常见的调制方式包括线性调频(LFM)、恒频(CW)和调制多普勒等。
不同的调制方式对系统的功耗、目标分辨率和抗干扰能力等方面有不同的影响。
在实际应用中,需要根据具体的任务需求和场景特点选择合适的调制方式,以达到最佳的探测和测距性能。
毫米波雷达距离短一点的波形参数的选择需要全面考虑大气传播特性、目标特征和系统性能等因素,通过合理的参数选择可以提高雷达系统的探测性能和图像成像质量,在军事、航空航天、地质勘探、气象监测等领域具有广泛的应用前景。
面向电磁特性测量的毫米波级联雷达系统设计
面向电磁特性测量的毫米波级联雷达系统设计
张苏;谭恺;雒梅逸香;唐文明;陈浩宇;徐丰
【期刊名称】《上海航天(中英文)》
【年(卷),期】2022(39)3
【摘要】单芯片毫米波雷达面临着测量维度单一、分辨率低的问题,级联雷达芯片可以获取目标的多维信息,但是给信号采集、存储和处理带来了很大压力。
本文设计了高速信号处理板与级联雷达芯片构成一套完整的毫米波多发多收(MIMO)成像系统。
该系统为稀疏阵面,采用时分多址(TDMA)模式,使得系统兼具2个维度的高分辨率以及空间分辨能力,并且系统内部采用高速串行计算机扩展总线标准(PCI-Express),外部采用Thunderbolt3接口,均具备很高的通道传输速率,支持对目标区域进行实时成像。
使用该系统可以从高分辨成像结果中提取有效的电磁特征,以更好地使用毫米波区分不同电磁特性的目标。
最后,采用此系统开展点目标和复杂目标的成像试验,成像结果充分验证了该毫米波雷达可以有效测量不同类型目标的电磁特征,对不同电磁特性的目标具备一定的分辨能力及快速成像能力。
【总页数】7页(P20-25)
【作者】张苏;谭恺;雒梅逸香;唐文明;陈浩宇;徐丰
【作者单位】复旦大学信息科学与工程学院;上海御渡半导体科技有限公司
【正文语种】中文
【中图分类】TN957.2;TP732.1
【相关文献】
1.面向动态目标的汽车毫米波雷达防撞系统设计
2.全球地表雷达后向散射系数的特性分析及其对星载降水测量雷达系统设计的影响
3.3mm波电磁特性测量雷达
4.雷达目标特性的毫米波紧缩场测量方法
5.雷达目标电磁散射特性仿真与测量
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
dA ) (t
dD O c iO Sn D
一R O (0 1)
155 z在本系统方案中, 0. 。 MH 可取比较差的地 面条件 S N“ ld , / OB 系统带宽 B = 10 z a 1MH ,
因此, 由式() 6 表示的最大误差为 :
£ :“ 3 6 s . n
共用天线所产生的“ 测距盲区”就要减小发射脉 , 冲的宽度 。
图 2 m 8 m波段近程测距
雷达测距原理框 图
R一( :2 2 ( , ・。 。 +) / )
式中, , 为系统最小作用距离 , 为发射脉 R, : 冲的宽度 , 为天线从发射到接收之间的延迟时 t 。
13 .7
r
_即C 0 tD 9 △t .
() 9
亡
由上式可见, 当天线波束垂直于地面( O 即 D
=90时,t=0此时对地测量可认为地面等 0) A ,
效为以天线波束中心为圆心的点 目标。 O 当 D并 90 由于面目标效应 , 0 时, 将产生误差 。。 ;对式() 9
43 4
弹箭 与制 导学报
20 0 5年
8 毫米波近程测距雷达设计‘
肖泽龙 , 许建 中, 彭树生, 余 勇
( 南京理工大学, 南京 209) 104 [ 摘要〕介绍了 8 毫米波近程测距雷达的工程实现。讨论了系统的工作原理, 详细分析 了系统参数和测距精
t i tippr " e nie te t id cse, t pr e r ad peio o d t c m aui e n s e. pi p o h ss m i us ss m a t s te c i f a e sr g d h a T r c l f y e s h s d y e a m e n h r s n i n e n s ae l e i dti A d i p m nai o d tne aui m d l i it d cd E pr et r u s w r aa zd e l n te l ett n i ac m sr g u s r ue. ei na e l so n y n a . h m e o f s e n o e n o x m l t h s
经天线和环流器进人混频器 , 通过与本振信号混 频, 输出的差频信号输人到由中频放大, 带通滤 波、 包络检波、 视频放大等组成的信号提取部分, 将淹没在噪声 中的带有 目标特性 的有用信号提 取出来, 在嵌人式系统中进行测距等处理。
图 1 m 8 m近程测距雷达原理框 图
天线 :
口径:3m 增益 :8B 主瓣波束宽度: m; 10 2d ;
43 ( =34 ; .0 6 ) 噪声系数 : 1 d ; b F < B 增益平坦 2
: 肖泽龙 , 湖南安仁人, 男, 博士研究生, 研究方向: 毫米波探测技术与被动毫米波成像技术。
第2 5卷第 4期
2 雷达 设计
2 1 系统描述 . 系统原理框 图见图 1 由发射接收、 , 信号提 取以及信号处理三大部分组成。发射机将经脉 冲调制的信号由天线向目标发射, 目标回波信号
: 0 5 03 2 20 一 : 一 9
系统主要技术指标 : 工作频率:52 H 3. z G 脉冲功率 源 : 发射 脉宽: 3 s 发射周期: 1n ; 1u ; 3s峰值功率 :W 2
步提高测距精度和测距范围, 可把两片 A 90 D51
级联。测距电路原理如图 2 所示:
理, 信噪比要大于 1d 4B即 SN d L, / > 1 B2 所以 4 1 系统作用距离从理论上讲至少可以达到 80 0m. 222 发射脉冲宽度选择 .. 从下式可知闭, 为减小由于系统采用的收发
1 引言
随着毫米波器件与毫米波技术的发展 , 以及 由于毫米波具有准光特性和近似全天候的工作 能力, 毫米波雷达已广泛的应用于多种领域。毫 米波近程探测雷达是指作用距离从几米到几百 米工作在毫米波段的小型雷达, 由于其成本低、 体积小等优势, 不仅在军事上应用广泛, 在民用 如汽车防撞、 交通管制、 导航等方面也得到了重 点研究。本文介绍了非相干脉冲体制毫米波雷 达的工作原理 、 参数和测距精度分析以及测距功 能模块 的实现 , 并给出了实验结果 。
间。
d R
24 测距精度分析 . 脉冲测距是通过对视频 回波的时延 t R =2 /
C的测量来实现的。测距误差主要 由下式决定 :
tc , d c t c d dt 十 - 一 , 份 犷. 艾 匕 花 2 乙 乙
() 5
系统发射脉宽为 1n , 3 考虑到实际系统中部 s 件之间的其它影响, 系统最小工作距离在 1r左 0 n
时间 。
R = c・ r 2 A / () 4
221 作用距离分析 ..
当雷 达 探 测 地 面 上 目标 时 , 据 雷 达 方 根 程D , S R可由下式表示 : 7其 N PG22 B X - 2 , Aa l 0. 2 o .k SN / () 1 262 2T B F L eT 5nR k , , , c s
度, 介绍了测距模块的具体实现。 实验结果表明. 系统的测距范围超过 10m, 00 当小于 80 0m时测距精度小于
士3 m,
〔 关键词〕毫米波 ; 测距雷达; 工程设计 ; 高塔试验
[ 中图分类号〕T 9 N5 [ 文献标识码」A
D s n 8 lme r v N a R n e auig ei o Mii t Wae r g Mesr g f l e e a n
右。
223 发射脉冲重复周期选择 .. 脉冲雷达发射脉冲重复周期 主要 由时间空 间特性决定 , 首先应满足最大作用距离的需要,
即:
其中,t d 主要 由以下 四个 因素决定 : 由接收 机噪声引起的测时误差 。, ,由发射脉冲波形失真 引起的误差 。, :发射脉冲波形失真引起的误差 E 2 以及面 目标 中心误差 。 ;
8 毫米波近程测距雷达设计
肖泽龙等
4 5 3
度: d ; 士1B
中放 :
总增益: G=6d ; 0 B 带宽:1MH ; 10 z检波灵敏
度: O / 5 V W; 0
混频器本振功率源参数 : 本振功率 > : lmw; o 带宽: G ; 妻I Hz噪声系 数 :F 二5 B ;2 d 双边带且包括其它射频损耗 22 近程测距雷达的参数选择 .
另外 , 发射脉冲重复周期必须保证在系统波 束扫描某一定宽度 目标所对应 的时间内出现脉 冲数能满足积分计数电路正常工作的需要。 综合 考虑以上 因素, 系统 发射脉 冲重复周期选 为 1p o 3s
2 3 测距实现 .
雷达测距是通过测量发射脉冲与 目标 回波 之间的延时来实现的 式中 △ 为发射脉冲与 目标 回波之间的延时 r
本系统测距采用移动门法〔, A R高速 3 利用 V ]
单片机 A 9S33 T 21 和可编程延时芯片 A 90 来 0 D 51 产生延时移动门, 通过与回波信号进行相关处理 来实现测距。 V A R单 片机采取 RS IC结构, 允许 在一个时钟周期执行单条指令的同时访问两个独 立的寄存器, 这种结构提高了代码效率, A R 使 V 得到了比普通的 CS IC单片机快 1 倍的性能, 0 一 个指令在几十到几百纳秒之间, 这在实时处理中 显得尤为重要。A 90 可通过编程产生 25s D 51 . - n lu 的延时, os 且具有 lp 的延时分辨率。为进一 os
241 接收机噪声引起的测时误差 E .. '
E 主要由接收机噪声干扰影响回波脉冲的 1 前沿引起 , 可1 , / 二 () 3
式中 R 二为系统最大作用距离 , . 、 T 为脉 冲
Dit n e a a sa c R d r
X A ) l g X J nzog P N S u hn , Y n I ( Z- n , i - n , G - eg Y eo U h a E hs U g o
( aj g i rt o Si c &T cnl y N nn 209 , h a j g 04 C i ) N nn U v sy c ne i n e i f e eho g , i 1 o a n
式中, ‘ 尸为发射峰值功率, 又为波长 ,, B 为系统带 。 宽, , F 为单边带噪声系数 , L为系统损耗系数 , G 为天线增益, 为目标雷达截面积( C )K 为波 。 R S , 尔兹曼 常数,.8 1- JK, 13 X 2 / a为大气衰减系 0'
数, 为俯视角,为雷达天线半功率波束宽度。 甲 B
242 发射脉冲波形失真引起的误差: .. 2
理想的发射脉冲为一理想矩形波, 但由于器 件开关速度以及噪声等影响 , 由此产生的测时误 差 。 可由下式近似计算 : :
根据总体指标要求, o 0,O 二5= 设0 = 0 D 0 6 A
d oB O +
4 3, . 则当 R 0 0 = 8 m时, 0 由式(0 得: 1)
根据表 1的参 数, , 且 T .= 20 , 9k a 3 = . OB k 下雨 , d / m( 比较差 的气候条件)F = B , , 5 , d
L d, 3 ,=一 3 2 对水泥地 二2B ( 0 6 3 / p 0 = dm m( B 2
面)代人方程() , 1 可得 当作用距离小于 80 0 米时 信噪比(/ 大于 1 d 。 SN ) 5 我们知道 , B 考虑信号处
80 0 m.
K y od : i e r v ; aui d t c rdr eg er g s nh htw r ei n ew rsm lm t w e m sr g a e a; i ei d i ; - e epr t i l e a e n i n a s n n n eg i o g x me