乘用车驻车制动计算(完整过程)
轻卡驻车制动系统性能计算及校核
轻卡驻车制动系统性能计算及校核吴耀斌;唐庆伟;郭志强;潘兴旺;高华发【摘要】文章以我司H01轻卡中央鼓式驻车制动器开发为例,介绍轻卡驻车制动系统国家法规相关要求,影响驻车制动性能的因素以及如何进行驻车制动系统性能的计算与校核.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)008【总页数】3页(P159-161)【关键词】驻车制动器;驻车手柄行程【作者】吴耀斌;唐庆伟;郭志强;潘兴旺;高华发【作者单位】奇瑞汽车河南有限公司,河南开封 475000;奇瑞汽车河南有限公司,河南开封 475000;奇瑞汽车河南有限公司,河南开封 475000;奇瑞汽车河南有限公司,河南开封 475000;奇瑞汽车河南有限公司,河南开封 475000【正文语种】中文【中图分类】U467CLC NO.:U467 Document Code: A Article ID: 1671-7988 (2017)08-159-03汽车驻车制动系统作为制动系统一个单元,对汽车行驶安全具有重要作用。
影响汽车驻车性能的主要因素有两个,一个是在规定驻车操纵力下产生的制动力矩,一个是操纵驻车制动装置下工作行程。
本文将从这两方面通过计算分析驻车制动性能。
根据GB12676《汽车制动系统结构、性能和试验方法》中对于轻卡(N1、N2类)驻车制动系统要求如下:a、驻车制动系统必须使满载车辆停在18%的坡道上(上坡或者下坡);b、驻车制动是手控制的,控制力不得超过600N、是脚控制的,控制力不得超过700N;c、当驻车制动与应急制动共用同一装置时,其满载制动平均及停车前瞬时减速度不得小于1.5m/s2,对于驻车与行车不共用同一衬片的N1车辆,其平平均减速度不得小于2.0m/s2,停车前瞬间不得小于1.5m/s2。
应急制动是手控制的,控制力不得超过600N、是脚控制的,控制力不得超过700N。
d、驻车制动的控制装置的安装位置应适当,其操纵装置应有足够的储备行程,一般应在操纵装置全行程的三分之二以内产生规定的制动效能;驻车制动机构装有自动调节装置时允许在全行程的四分之三以内达到规定的制动效能。
牵引车满载时驻车制动计算(单用驱动桥驻车时)-2020408
牵引车满载时驻车制动计算(单用驱动桥驻车时)
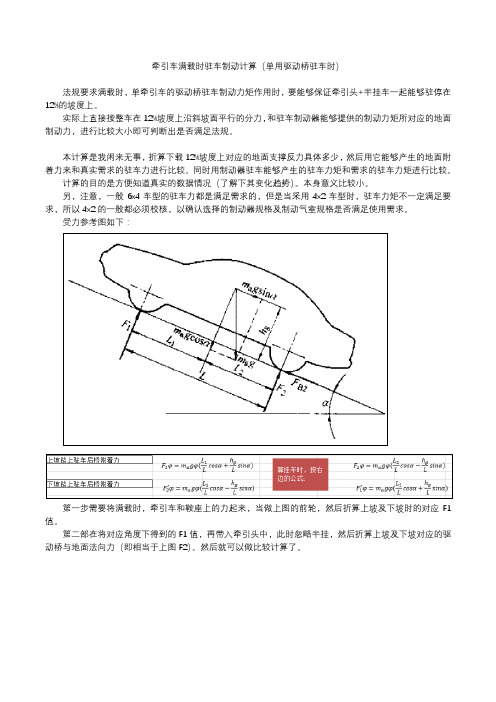
法规要求满载时,单牵引车的驱动桥驻车制动力矩作用时,要能够保证牵引头+半挂车一起能够驻停在12%的坡度上。
实际上直接按整车在12%坡度上沿斜坡面平行的分力,和驻车制动器能够提供的制动力矩所对应的地面制动力,进行比较大小即可判断出是否满足法规。
本计算是我闲来无事,折算下载12%坡度上对应的地面支撑反力具体多少,然后用它能够产生的地面附着力来和真实需求的驻车力进行比较。
同时用制动器驻车能够产生的驻车力矩和需求的驻车力矩进行比较。
计算的目的是方便知道真实的数据情况(了解下其变化趋势)。
本身意义比较小。
另,注意,一般6x4车型的驻车力都是满足需求的,但是当采用4x2车型时,驻车力矩不一定满足要求,所以4x2的一般都必须校核,以确认选择的制动器规格及制动气室规格是否满足使用需求。
受力参考图如下:
第一步需要将满载时,牵引车和鞍座上的力起来,当做上图的前轮,然后折算上坡及下坡时的对应F1值。
第二部在将对应角度下得到的F1值,再带入牵引头中,此时忽略半挂,然后折算上坡及下坡对应的驱动桥与地面法向力(即相当于上图F2)。
然后就可以做比较计算了。
牵引车驻车能力计算-20200406.xlsx。
卡车的驻车制动力的计算
卡车的驻车制动力的计算姜帆【摘要】文章对4x2、4x4民用、军用卡车的驻车制动力进行了讨论,并依据GB 12676对民用卡车要在18%坡道停驻的要求和GJB1473对军用卡车要在40%坡道停驻的要求,运用Matlab/Siumlink软件编写了计算程序对车辆的驻车制动力进行了校核.【期刊名称】《汽车实用技术》【年(卷),期】2015(000)010【总页数】3页(P74-75,119)【关键词】驻车制动力;坡道;Matlab【作者】姜帆【作者单位】陕西重型汽车有限公司,陕西西安710200【正文语种】中文【中图分类】U462.110.16638/ki.1671-7988.2015.10.028CLC NO.: U462.1 Document Code: A Article ID: 1671-7988(2015)10-74-03 GB 12676-1999(汽车制动系统结构、性能和试验方法) 5.2.7.1中,要求民用卡车的驻车制动系统必须使满载车辆停在18%坡道上(约10.2°上坡或下坡)。
GJB1473(军用汽车安全性标准)5.1.15中,要求军用越野汽车在额定装载质量和不带挂车的条件下,使用驻车制动应能在40%的纵坡上(约21.8°),使汽车在向上和向下两个方向均能可靠停住。
本文对后桥装配有驻车制动器的4x2、4x4的民用、军用卡车此方面性能进行了理论推演,运用Matlab/Simulink软件编写了计算程序,在已知车辆满载重量、轴距、重心位置、地面附着系数等参数,运行该程序可求得车辆驻车制动力所能停驻的坡度的坡道角度和所需驻车制动器制动力的大小。
对于在后桥装配有驻车制动器的4x4、4x2卡车,其坡道驻车制动能力取决于后桥上的驻车制动器的制动力和后桥轮胎与地面的附着条件。
校核时预设地面附着系数为0.7,再比较车辆后桥驻车制动器的制动力与车辆所能提供的后桥轮胎附着力大小。
当车辆驻车制动器制动力大于车辆后桥轮胎附着力时,选用车辆后桥附着力来计算车辆驻坡能力;当车辆驻车制动器制动力小于车辆后桥附着力时,选用车辆驻车制动器制动力来计算车辆驻坡能力,可知无论驻车制动器制动力有多大,坡道上车辆所能利用的最大有效驻车制动力为车辆后桥附着力。
制动计算公式范文
制动计算公式范文1.紧急制动距离公式:紧急制动距离是汽车从刹车开始到完全停止所需的距离。
根据经验公式,紧急制动距离(D)可以通过以下公式计算:D=(V²/254f)×g其中,V为车速,单位是km/h;f是车辆的质量分配比例,通常取前轮:后轮=7:3;g为重力加速度(g≈9.81)2.刹车力计算公式:刹车力是指制动器对车轮的制动力。
根据摩擦制动理论,刹车力可以通过以下公式计算:F=μ×m其中,F为刹车力,单位是牛顿(N);μ是制动系数,取决于制动器和路面的摩擦系数;m为车辆的质量,单位是千克(Kg)。
3.制动鼓温升公式:制动过程中,刹车器会因摩擦而产生热量,造成刹车鼓的温度升高。
根据经验公式,刹车鼓的温升(ΔT)可以通过以下公式计算:ΔT=F×r×α其中,ΔT为温升,单位是摄氏度(℃);F是刹车力;r为刹车鼓的半径,单位是米(m);α为材料的热膨胀系数。
4.制动盘厚度的计算公式:制动盘是刹车系统的关键部件之一,其厚度与制动性能密切相关。
根据经验公式,制动盘的最小厚度(t)可以通过以下公式计算:t=(K×Q×V)/(μ×d)其中,t为制动盘的最小厚度,单位是毫米(mm);K是经验系数(一般取2);Q为总的制动热量,单位是焦耳(J);V为行驶速度,单位是米/秒(m/s);μ是制动盘和制动片的摩擦系数;d为制动盘的直径,单位是米(m)。
以上是一些常用的制动计算公式,它们在车辆设计和制动系统优化中起着重要的作用。
通过合理应用这些公式,可以提高汽车的制动性能和安全性。
同时,设计师还应结合实际情况和实验数据,进行综合考虑和分析,以确保设计的制动系统满足要求。
制动计算公式
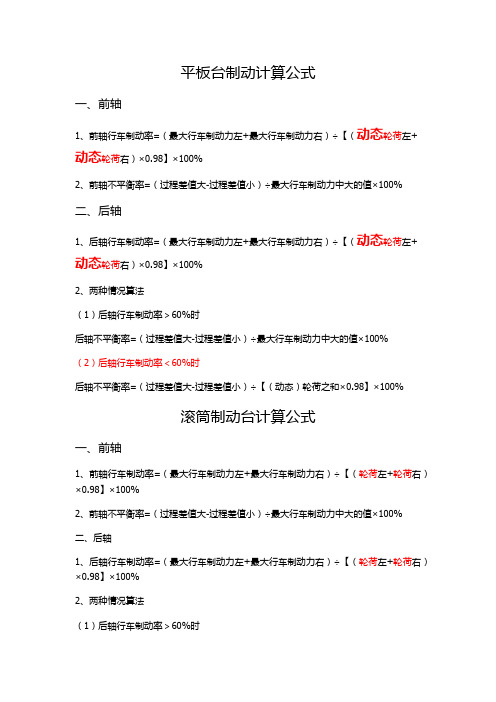
平板台制动计算公式一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×0.98】×100%2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×0.98】×100%2、两种情况算法(1)后轴行车制动率>60%时后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%(2)后轴行车制动率<60%时后轴不平衡率=(过程差值大-过程差值小)÷【(动态)轮荷之和×0.98】×100%滚筒制动台计算公式一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×0.98】×100%2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×0.98】×100%2、两种情况算法(1)后轴行车制动率>60%时后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100% (2)后轴行车制动率<60%时后轴不平衡率=(过程差值大-过程差值小)÷【轮荷之和×0.98】×100% 注:(1)机动车纵向中心线位置以前的轴为前轴,其他轴为后轴;(2)挂车的所有车轴均按后轴计算;(3)用平板台测试并装轴制动力时,并装轴可视为一轴整车制动率整车制动率=最大行车制动力÷(整车轮荷×0.98)×100%驻车制动率驻车制动率=驻车制动力÷(整车轮荷×0.98)×100%台式检验制动率要求(空载)台式检验制动力要求(加载)台式检验制动力不平衡率要求(空载和加载)。
制动器设计的计算过程
制动器设计的计算过程钳盘式制动器在液力助力下制动力大且稳定,而且空气直接通过盘式制动盘,故盘式制动器的散热性很好,在各种路面都有良好的制动表现。
将越来越多地应用于轮式装载机的制动系统设计中。
目前,轮式装载机制动系统的设计有两大发展有两大发展趋势。
其一是行车制动起向封闭式湿式全盘式发展。
这种制动器全封闭防水防尘,制动性能稳定,耐磨损使用寿命长,不需调整。
散热效果良好,摩擦副温度显著降低。
不增大径向尺寸的前提下改变摩擦盘数量,可调节制动力矩,实现系列化标准化。
其二是制动传动装置由气推油向全液压动力制动发展。
这种制动装置的制动踏板直接操纵制动液压阀,可省去气动元件,结构简单紧凑,冬季不会冻结,不需放水保养,阀和管路不会锈蚀,制动可靠性提高。
所以在轮式装载机的制动系统中被越来越多地得到应用。
本文对此系统的设计计算方法和步骤简单介绍。
1假设条件和制动性能要求1.1假设条件忽略空气阻力,并假定四轮的制动器制动力矩相等且同时起作用;驻车制动器制动力矩作用于变速器的输出端或驱动桥的输入端。
1.2制动性能要求1.2.1对制动距离的要求根据GB8532-87 (与ISO 3450-85等效),非公路行驶机械的制动距离的(水平路面)要求如表1。
表1非公路行驶机械的制动距离最高车速(km/h)最大质量(kg)行车制动系统的制动距离(m)辅助制动系统的制动距离(m)二32/ 0 W32000 V2/68+(V2/124) . (G/32000) V2/39+ (V2/130). (G/32000)三32000 V2/44 V2/30W32 / 0 W32000 V2/68+(V2/124) . (G/32000) +0.1(32-V) V2/39+ (V2/130) . (G/32000) +0.1(32-V)三32000 V2/44+0.1(32-V) V2/30+0.1(32-V)* V——制动初速度(Km/h) G——整机工作质量(kg)1.2.2对行车系统的性能要求除了满足制动距离要求外,还要求行车制动系统能满足装载机空载在25% (14.0)的坡度上停住。
驻车制动器驻车效能计算和试验方法
驻车制动器驻车效能计算和试验方法探讨[摘要]驻车制动是制动系统设计时必须满足的三大基本功能之一,即应能使车辆即使在没有驾驶员的情况下,也能停放在上、下坡道上。
驻车制动器设计时,如何保证制动器的驻车效能满足法规要求,以及如何进行驻车效能验证,是本文阐述的重点。
[关键词]驻车制动器、驻车效能、制动法规、效能因数试验方法、制动输入力、驻车制动力力矩1 驻车制动器的功能要求驻车制动器通常具有以下功能:1.1 静态驻车:通过对驻车制动器输入一定的输入量,驻车制动器能使车辆可靠地在原地停驻,即使在没有驾驶员的情况下,也能停放在法规规定的最大上、下坡道上。
1.2 应急制动:当车辆丧失行车制动能力的情况下(制动系统管路失效等原因),通过手或脚(操纵)输入输入量,使车辆产生制动力,达到停车的目的。
2 驻车制动器的分类驻车制动器的分类驻车制动器以其型式分类备注:限于篇幅,本文只对组合式A类驻车制动器的驻车效能和验证方法进行阐述。
3 车辆的驻车效能要求3.1法规要求GB12676-2004《汽车制动系统结构、性能和试验方法》规定:对于M1类(属于组合式A类范畴),在手操纵杆输入力不大于400N,保证车辆满载时能在20%的坡度上驻车。
3.2 车辆所需驻车制动力矩计算以铃木某YS8为例,进行计算 2%20⨯⨯⨯=R G W M ————————— (1)M :单轮驻车制动力矩N.m W :车辆满载质量1310kg G : 9.8m/s2R :车轮滚动半径0.267m %20:指20%坡度按公式(1)得出 YS8 车为满足法规所需的驻车力矩:M =2%20267.08.91310⨯⨯⨯= 343 N.m4驻车制动器的效能计算为验证驻车制动器的驻车制动效能能否满足车辆驻车的要求,需对驻车制动器驻车效能进行计算。
4.1 驻车制动器结构确定对于YS8等经济型轿车,后轴行车制动器和驻车制动器通常采用领从蹄鼓式制动器,驻车制动器为组合式A 类,结构如图1:4.2 驻车制动器的工作原理如图1,驻车时,制动鼓按图示方向旋转(或具有该方向旋转趋势),由于在驻车制动拉臂挂钩A 处施加输入力F ,推杆机械促动下对两蹄产生力1F 、2F ,在2F 作用下,对于右制动蹄来说,是领蹄,产生力图示方向的摩擦力l F ;1F 推动左制动蹄,对于左制动蹄来说,是从蹄, 产生力图示方向的摩擦力Ft ,两摩擦力产生摩擦力矩就是驻车制动力矩,使得车辆能在坡度上停驻。
制动计算公式

制动计算公式LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】平板台制动计算公式一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×】×100%2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×】×100%2、两种情况算法(1)后轴行车制动率>60%时后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%(2)后轴行车制动率<60%时后轴不平衡率=(过程差值大-过程差值小)÷【(动态)轮荷之和×】×100%滚筒制动台计算公式一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×】×100%2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×】×100%2、两种情况算法(1)后轴行车制动率>60%时后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%(2)后轴行车制动率<60%时后轴不平衡率=(过程差值大-过程差值小)÷【轮荷之和×】×100%注:(1)机动车纵向中心线位置以前的轴为前轴,其他轴为后轴;(2)挂车的所有车轴均按后轴计算;(3)用平板台测试并装轴制动力时,并装轴可视为一轴整车制动率整车制动率=最大行车制动力÷(整车轮荷×)×100%驻车制动率驻车制动率=驻车制动力÷(整车轮荷×)×100%台式检验制动率要求(空载)台式检验制动力要求(加载)台式检验制动力不平衡率要求(空载和加载)。
制动计算公式

平板台制动计算公式、/■. 「一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)*【(动态轮荷左+ 动态轮荷右)X 0.981 X100%2、前轴不平衡率=(过程差值大-过程差值小)*最大行车制动力中大的值X 100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)*【(^动态轮荷左+ 动态轮荷右)X 0.981 X100%2、两种情况算法(1)后轴行车制动率〉60%时后轴不平衡率=(过程差值大-过程差值小)*最大行车制动力中大的值X 100%(2 )后轴行车制动率v 60%时后轴不平衡率=(过程差值大-过程差值小)*【(动态)轮荷之和X 0.981 X100%滚筒制动台计算公式、/■. 「一、前轴1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)*【(轮荷左+轮荷右)X0.981X100%2、前轴不平衡率=(过程差值大-过程差值小)*最大行车制动力中大的值X 100%二、后轴1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)*【(轮荷左+轮荷右)X0.981X100%2、两种情况算法(1)后轴行车制动率〉60%时后轴不平衡率=(过程差值大-过程差值小)*最大行车制动力中大的值X 100%(2 )后轴行车制动率v 60%时后轴不平衡率=(过程差值大-过程差值小)*【轮荷之和X 0.981 X100%注:(1 )机动车纵向中心线位置以前的轴为前轴,其他轴为后轴;(2 )挂车的所有车轴均按后轴计算;(3)用平板台测试并装轴制动力时,并装轴可视为一轴整车制动率整车制动率=最大行车制动力*(整车轮荷X 0.98 )X100%驻车制动率驻车制动率=驻车制动力*(整车轮荷X 0.98 )X100%台式检验制动率要求(空载)台式检验制动力要求(加载)台式检验制动力不平衡率要求(空载和加载)。
制动距离计算公式详解

制动距离计算公式详解嘿,咱们今天来好好聊聊制动距离这个有点神秘但又超级重要的东西,特别是它的计算公式。
先来说说啥是制动距离。
想象一下,你开着车在路上跑得正欢,突然发现前面有情况,赶紧一脚刹车踩下去,从你踩刹车的那一刻开始,到车完全停下来,车所走过的这段路程,就是制动距离。
这可关系到咱们的行车安全,要是没搞清楚,说不定哪天就得出大事儿。
那制动距离到底是咋算出来的呢?这就得提到一个公式:制动距离= 车速的平方除以 2 倍的制动加速度。
咱们来仔细瞅瞅这个公式哈。
车速的平方,这就意味着车速越快,制动距离会增加得特别快。
比如说,车速从 30 公里每小时提高到 60公里每小时,可不止是速度翻了一倍,制动距离那是翻了好几倍呢!我之前有一次在路上开车,车速不算快,也就 50 公里每小时左右吧。
突然前面窜出来一只小狗,我下意识地猛踩刹车,当时就感觉心都提到嗓子眼儿了,好在车很快就停住了,后来我自己算了算,按照那个速度和我车的制动性能,制动距离还真就跟公式算出来的差不多,这可把我惊出了一身冷汗,从那以后开车我都特别小心,控制车速。
再来说说这个制动加速度。
制动加速度越大,说明刹车越给力,制动距离就越短。
这就跟车的刹车系统好不好有很大关系啦。
好的刹车系统,能在你踩刹车的时候迅速产生大的制动力,让车更快停下来。
给大家举个例子吧,假如一辆车的车速是 60 公里每小时,制动加速度是 8 米每秒平方,那咱们来算算制动距离。
先把车速换算成米每秒,60 公里每小时差不多就是 16.67 米每秒。
然后代入公式,制动距离 = (16.67)的平方 ÷(2×8),算出来大约是 17.36 米。
可别小看这个公式哦,在实际生活中用处大着呢!比如交通规划,工程师们得根据道路的设计速度,计算出合理的刹车距离,来设置安全的车距和交通标识。
还有考驾照的时候,虽然不会让咱们直接算,但理解了这个原理,对咱们掌握刹车技巧,安全驾驶可太有帮助啦!总之,搞清楚制动距离的计算公式,能让咱们更好地理解交通安全的重要性,开车的时候多留个心眼儿,保护自己也保护他人。
乘用车电子驻车制动系统驻坡计算研究
汽车文摘史亨波1,2隋清海1,2郝占武1,2张建斌1,2闫鲁平1,2(1.中国第一汽车股份有限公司研发总院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)【摘要】研究了乘用车电子驻车制动系统(EPB )在不同温度水平、不同坡度条件下的驻坡计算方法。
首先根据法规和车型目标分析了最大驻坡需求,再结合实际的整车路试情况定义了不同区间的温度水平,进而得出不同温度区间的最大驻坡要求。
以某车型的分级夹紧策略为例,从正向研究驻车电机夹紧力的计算思路,并针对驻车制动控制(PBC )软件中有、无温度模型2种系统,分别研究各级所需夹紧力的计算方法。
主题词:EPB 分级夹紧策略驻坡计算中图分类号:U462.3+5文献标识码:ADOI:10.19822/ki.1671-6329.20210012Hill-Holding Computation Research on Passenger Car ’s EPBShi Hengbo 1,2,Sui Qinghai 1,2,Hao Zhanwu 1,2,Zhang Jianbin 1,2,Yan Luping 1,2(1.General Research and Development Institute,China FAW Corporation Limited,Changchun 130013;2.State Key Laboratory of Comprehensive Technology on Automobile Vibration and Noise &Safety Control,Changchun 130013)【Abstract 】This paper studies on the hill-holding computation methods on passenger car ’s EPB at differenttemperature and on different sizes of slope.First,according to national standards and vehicle ’s engineering goals,the max size of parking slope is defined.Then,combining with the vehicle ’s road test results,the different kinds of temperature level for parking brake are defined.At last,the max parking slope at different temperature level can be analyzed.Taking a vehicle ’s graded clamping strategy of EPB for example,this paper aims to study on the computation methods of the neededclamping force for EPB with or without temperature model in Parking Brake Control (PBC)software.Key words:EPB,Graded clamping strategy,Hill-holding computation乘用车电子驻车制动系统驻坡计算研究【欢迎引用】史亨波,隋清海,郝占武,等.乘用车电子驻车制动系统驻坡计算研究[J].汽车文摘,2021(7):37-41.【Cite this paper 】Shi H,Sui H,Hao Z,et al.Hill-Holding Computation Research on Passenger Car ’s EPB[J].Automotive Digest (Chi⁃nese),2021(7):37-41.1前言乘用车驻车制动系统主要分为2大类:传统机械驻车和电子驻车。
制动系统设计计算分析
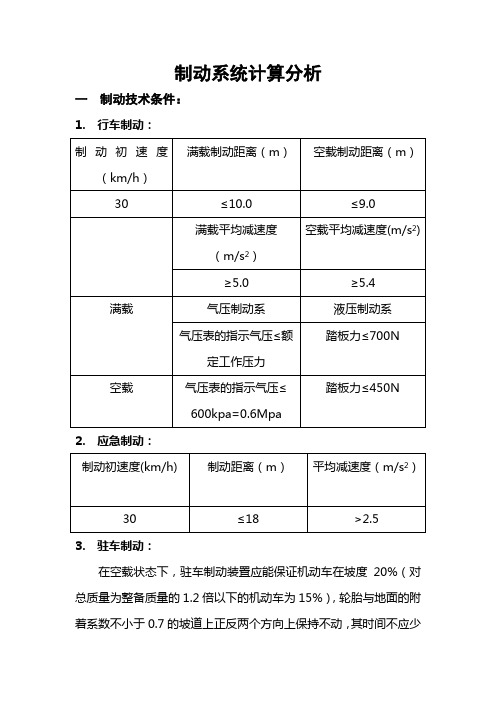
制动系统计算分析一制动技术条件:1. 行车制动:2. 应急制动:3. 驻车制动:在空载状态下,驻车制动装置应能保证机动车在坡度20%(对总质量为整备质量的1.2倍以下的机动车为15%),轮胎与地面的附着系数不小于0.7的坡道上正反两个方向上保持不动,其时间不应少于5分钟。
二制动器选型1.最大制动力矩的确定根据同步附着系数和整车参数,确定前后轴所需制动力矩的范围,最大制动力是汽车附着质量被完全利用的条件下获得的,设良好路面附着系数φ=0.7。
满载情况下,确定前后轴制动器所需要的最大制动力矩。
为:前轴Mu1=G*φ(b+φ*h g)*r e /L (N.m)后轴Mu2=G*φ(a-φ*h g)*r e /L (N.m)或者Mu1=β/(1-β)* Mu2 【β=(φ*h g+b)/L】其中r e -轮胎有效半径a-质心到前轴的距离b-质心到后轴的距离h g -质心高度L-轴距φ-良好路面附着系数G-满载总重量(N;g=9.8m/s2)同理:空载亦如此。
前轴;Mu11 后轴:Mu21根据满载和空载的情况,确定最大制动力矩,此力满足最大值。
所以:前轮制动器制动力矩(单个)≥Mu1或Mu11/2后轮制动器制动力矩(单个)≥Mu2或Mu21/22.行车制动性能计算(满载情况下)已知参数:前桥最大制动力矩Tu1(N.m) 单个制动器后桥最大制动力矩Tu2(N.m) 单个制动器满载整车总质量M(kg)①整车制动力Mu1= Tu1*φ*2 (N.m)Mu2= Tu2*φ*2 (N.m)Fu= (Mu1+ Mu2)/r e (N)②制动减速度a b=Fu/M (m/s2)③制动距离S= U a0*(t21+ t211 /2)/3.6+ U a02 /25.92* a b其中:U a0 (km/h)-制动初速度,t21+ t211 /2 为气压制动系制动系作用时间(一般在0.3-0.9s)3.驻车制动性能计算满载下坡停驻时后轴车轮的附着力矩:MfMf=M*g*φ(a*cosα/L -h g*sinα/L)*r e (N.m)其中附着系数φ=0.7 坡度20%(α=11.31o)在20%坡上的下滑力矩:M滑M滑=M*g*sinα*r e (N.m)驻车度α=11.31o则Mf>M滑时,满足驻车要求。
乘用车驻车制动计算(完整过程)
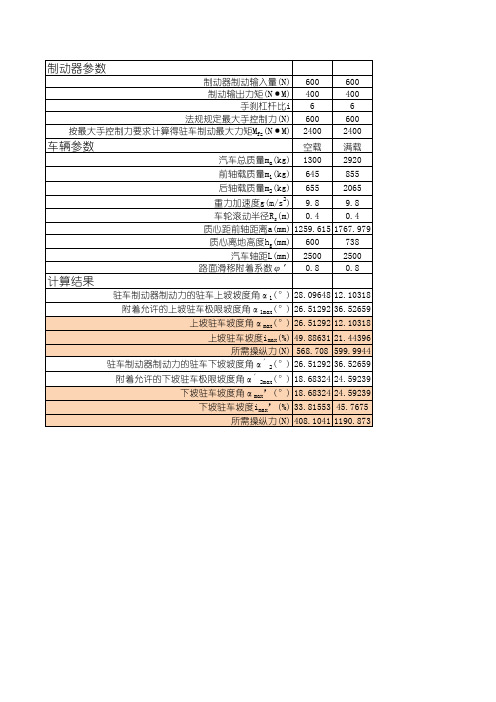
计算结果
驻车制动器制动力的驻车上坡坡度角α1(°) 28.09648 12.10318 附着允许的上坡驻车极限坡度角α1max(°) 26.51292 36.52659 上坡驻车坡度角αmax(°) 26.51292 12.10318 上坡驻车坡度imax(%) 49.88631 21.44396 所需操纵力(N) 568.708 599.9944 驻车制动器制动力的驻车下坡坡度角α'2(°) 26.51292 36.52659 附着允许的下坡驻车极限坡度角α
汽车总质量ma(kg) 前轴载质量m1(kg) 后轴载质量m2(kg)
2
重力加速度g(m/s ) 9.8 9.8 车轮滚动半径Rs(m) 0.4 0.4 质心距前轴距离a(mm) 1259.615 1767.979 质心离地高度hg(mm) 600 738 汽车轴距L(mm) 2500 2500 路面滑移附着系数φ′ 0.8 0.8
' 2max(°)
18.68324 24.59239
下坡驻车坡度角αmax’(°) 18.68324 24.59239 下坡驻车坡度imax’(%) 33.81553 45.7675 所需操纵力(N) 408.1041 1190.873
制动器参数
制动器制动输入量(N) 制动输出力矩(N·M) 手刹杠杆比i 法规规定最大手控制力(N) 按最大手控制力要求计算得驻车制动最大力矩Mfz(N·M) 600 400 6 600 2400 空载 1300 645 655 600 400 6 600 2400 满载 2
叉车驻车制动计算公式

叉车驻车制动计算公式叉车是一种用于搬运货物的重型机械设备,其安全性能对于工作场所的安全和生产效率至关重要。
而叉车的驻车制动系统是其安全性能中至关重要的一部分。
驻车制动系统的设计和计算对于叉车的安全性能有着直接的影响,因此我们需要对叉车的驻车制动系统进行深入的研究和计算。
叉车的驻车制动系统通常由制动器、制动盘、制动片和制动液等组成。
在叉车停车时,驻车制动系统需要能够牢固地固定住叉车,防止其在停车时滑动或移动。
因此,我们需要对叉车的驻车制动系统进行计算,以确保其能够满足停车时的牢固性能要求。
首先,我们需要计算叉车的驻车制动力。
驻车制动力是指制动系统需要产生的力来固定住叉车,防止其滑动或移动。
驻车制动力的计算公式为:F = μ N。
其中,F为驻车制动力,μ为制动系数,N为叉车的重力。
制动系数μ是一个与制动器、制动盘、制动片等相关的参数,通常由制造商提供。
叉车的重力N可以通过叉车的重量和重心位置来计算得到。
其次,我们需要计算叉车的驻车制动距离。
驻车制动距离是指叉车在停车时需要移动的距离,其计算公式为:S = (V^2) / (2 μ g)。
其中,S为驻车制动距离,V为叉车的速度,μ为制动系数,g为重力加速度。
根据这个公式,我们可以计算出叉车在不同速度下的驻车制动距离,从而确定制动系统是否能够满足停车时的要求。
最后,我们需要计算叉车的驻车制动时间。
驻车制动时间是指叉车在停车时需要花费的时间,其计算公式为:t = V / (μ g)。
其中,t为驻车制动时间,V为叉车的速度,μ为制动系数,g为重力加速度。
根据这个公式,我们可以计算出叉车在不同速度下的驻车制动时间,从而确定制动系统是否能够满足停车时的要求。
通过以上的计算公式,我们可以对叉车的驻车制动系统进行深入的研究和计算,从而确定其是否能够满足停车时的牢固性能要求。
同时,我们也可以根据这些计算结果来优化叉车的驻车制动系统设计,提高其安全性能和可靠性。
希望本文对叉车驻车制动系统的研究和设计能够有所帮助。
驻车制动设计计算

219式中ϕ——该车所能遇到的最大附着系数;q——制动强度e r ——车轮有效半径。
一个车轮制动器应有的最大制动力矩为按上列公式计算结果的半值。
奥龙、德御系列车采用的是斯太尔前轴、后桥,制动器采用的是斯太尔领从蹄鼓式制动器,如图13.5所示,制动器的规格为前φ420×160/后φ420×185,制动器结构参数及制动力矩见表13.1、表13.2,由于奥龙、德御车制动系统中没有安装气压感载调节阀,所以整车制动力不可调节,对同一系列车,整车制动力分配系数为定值,所以,实际制动力分配曲线与理想的制动力分配曲线相差较大,制动效率较低,前轮可能因抱死而丧失转向能力,后轮也可能抱死使汽车有发生后轴侧滑的危险。
图13.5 领从蹄鼓式制动器结构示意图因此,对奥龙、德御系列车来说,可以通过调整轴荷分配来调整重心位置,使车辆满载情况下的同步附着系数接近可能遇到的路面附着系数,才能获得稳定的制动工况。
表13.1 斯太尔前、后制动器结构参数表13.2 斯太尔前、后制动器在各种制动气压下的制动力矩4.驻车计算图13.6为汽车在上坡路上停驻时的受力情况,由此可得出汽车上坡停驻时的后轴车轮的附着力为:结构参数 STEYR (前) STEYR (后) L(mm) 155mm 155mm a(mm) 160mm 160mm M(mm) 38mm 38mm 摩擦片包角0β 95° 110° 摩擦片起始角 29°8′ 21°39′ 制动臂长l(mm) 122 145 摩擦片宽b(mm) 160 185 制动鼓半径(mm) 210 210 ()a MP P 0 0.5 0.6 0.7 0.8 m N M u ⋅ٛ/)(1前 10811 12974 15135 17299 m N M u ⋅ٛ/)(2后13573 16287 19002 21717220图13.6 汽车在上坡路上停驻时的受力简图)sin cos (12ααϕϕg a h L Lg m Z +=同样可求出汽车下坡停驻时的后轴车轮的附着力为:)sin cos (12ααϕϕg a h L Lg m Z −=′ 根据后轴车轮附着力与制动力相等的条件可求得汽车在上坡路和下坡路上停驻时的坡度极限倾角α,α′,即由αααϕsin )sin cos (1g m h L Lg m a g a =+ 求得汽车在上坡时可能停驻的极限上坡路倾角为:g h L L ϕϕα−=1arctan 汽车在下坡时可能停驻的极限下坡路倾角为:gh L L ϕϕα+=′1arctan GB7258-2004《机动车运行安全技术条件》中第7.13.3条要求, 在空载状态下,驻车制动装置应能保证机动车在坡度为 20%(对总质量为整备质量的 1.2 倍以下的机动车为 15%)、轮胎与路面间的附着系数不小于 0.7 的坡道上正、反两个方向保持固定不动,其时间不应少于 5 min 。
地铁列车制动及牵引计算
地铁列车制动及牵引计算地铁列车的制动与牵引计算是确保地铁列车能够平稳准确地停车、启动以及行驶的重要环节。
本文将介绍地铁列车的制动与牵引计算方法,并对其中的关键因素进行详细阐述。
地铁列车的制动计算主要包括两个方面:制动距离的计算和制动力的计算。
在计算制动距离时,需要考虑诸多因素,如列车的运行速度、重量、运行曲线的半径以及路面的条件等。
通常采用以下公式进行计算:制动距离=初速度²/(2×制动度)其中,初速度指列车刚开始减速时的速度,制动度是列车的减速度。
地铁列车的牵引计算主要是为了确定列车的最大运行速度和能够实现的最大加速度。
这需要综合考虑列车的功率、牵引系统的效率、列车的重量以及轨道的条件等多个因素。
一般情况下,可以使用如下公式进行计算:牵引力=列车的功率/列车的速度根据实际情况,可以通过调整列车的牵引力来实现不同的运行速度。
在地铁列车的制动和牵引计算中,还需要考虑特殊情况下的因素,例如紧急制动和陡坡行驶等。
对于紧急制动,需要计算所需的制动力以及实际可以提供的制动力之间的差距,并予以补偿。
对于陡坡行驶,需要计算列车在下坡时的制动力是否足够以及上坡时的牵引力是否足够。
此外,地铁列车的制动和牵引计算还需要考虑列车的运行曲线。
在曲线行驶时,列车需要增加横向的制动力,以确保能够在曲线半径的限制下安全运行。
同时,牵引力也需要相应调整,以保持列车的平稳行驶。
综上所述,地铁列车的制动和牵引计算是一个复杂而关键的过程。
通过合理计算并调整制动力和牵引力,可以确保地铁列车的安全和高效运行。
因此,在地铁列车的设计和运行过程中,需要充分考虑制动和牵引计算的各项因素,以使列车能够满足各类运行需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
重力加速度g(m/s ) 9.8 9.8 车轮滚动半径Rs(m) 0.4 0.4 质心距前轴距离a(mm) 1259.615 1767.979 质心离地高度hg(mm) 600 738 汽车轴距L(mm) 2500 2500 路面滑移附着系数φ′ 0.8 0.8
制动器参数
制动器制动输入量(N) 制动输出力矩(N·M) 手刹杠杆比i 法规规定最大手控制力(N) 按最大手控制力要求计算得驻车制动最大力矩Mfz(N·M) 600 400 6 600 2400 空载 1300 645 655 600 400 6 600 2400 满载 2920 855 2065
车ቤተ መጻሕፍቲ ባይዱ参数
' 2max(°)
18.68324 24.59239
下坡驻车坡度角αmax’(°) 18.68324 24.59239 下坡驻车坡度imax’(%) 33.81553 45.7675 所需操纵力(N) 408.1041 1190.873
计算结果
驻车制动器制动力的驻车上坡坡度角α1(°) 28.09648 12.10318 附着允许的上坡驻车极限坡度角α1max(°) 26.51292 36.52659 上坡驻车坡度角αmax(°) 26.51292 12.10318 上坡驻车坡度imax(%) 49.88631 21.44396 所需操纵力(N) 568.708 599.9944 驻车制动器制动力的驻车下坡坡度角α'2(°) 26.51292 36.52659 附着允许的下坡驻车极限坡度角α