除氧器水位控制
除氧器液位波动原因分析及处理措施

负荷运行时 5分钟需要的水 量。不 管电厂负荷如何变化 , 除氧器水 位控制 的功能就是保证 除氧器贮水 箱 中的水 位
恒定在 3 3 8 0 mm, 确 保 除氧 器 的 水 位 控 制 正 常 对 机 组 的 安
全 运 行 有 着 重 要 的意 义 。
2 . 2 凝汽 器排水 阀异常开 启 故障现象 : 凝 汽器液位低 于排水设定值 , 但是排水 阀
三 个 位 置 “ L C V 4 2 0 7 # 1 , # 2 ; L C V 4 2 0 7 # 1 , # 3 ; L C V4 2 0 7 # 2 ,
处理措施 :操作时应及时处理低加旁路阀电动 开度 , 确认低加旁 路 阀开 ; 若低旁 通 阀不打开 电场 , 则是操作人 员手动摇动低 电阀 门旁路 。 2 . 4 5号 高加 常疏 阀异 常关 闭
摘 要: 除 氧 器 液位 是机 组 运 行 的 一 个 重 要 的 控 制 参 数 , 因为 除 氧 器 液 位 过 低 , 则 可 能 导 致 给 水 泵 汽蚀 , 并触发反应堆线性降功率 , 而 除 氧 器液 住 过 高则会 淹 没 除氧 头 , 不但 影 响 除氧 效 果 , 还 可 能使 给 水 经 抽 汽 管 线 倒 流 至 汽轮 机 , 引起 水 击 事 故 , 损 坏 汽 机 。我 厂 除 氧 器
的液 位 控 制 采 用 的 是 三 冲 量 P I D调 节. 较好 的 实现 了 除氧 器的 液 位 自动 控 制 。 关键词 : 除氧器 ; 液位波动 ; 原 因分 析 ; 处理 措 施 中 图分 类 号 : T M6 2 3 文献标志码 : A 文章 编 号 : 1 6 7 2 — 3 8 7 2 ( 2 0 1 7 ) 0 9 — 0 0 5 5 一 O 2
除氧器水位控制简介

除氧器水位控制简介目前超临界压力机组运行中,除氧器水位控制是工厂自动控制中的一部分。
其特点是由于机组的热力系统及运行特性决定了除氧器水位控制在不同的工况下可以自动先择单冲量或三冲量控制。
一、除氧器水位调节工艺流程。
工艺流程如图(一)所示,单台凝结水泵出力及单台汽动给水泵出力均为50%MCR。
电动给水泵通过液力偶合器变速运行,出力为30%MCR。
除氧器水箱正常水位2875mm,水容量425T。
机组在干态下(即160MW-600MW区间)滑压运行。
正常时高压加热器疏逐级自流到除氧器水箱。
#2~4低压加热器疏水逐级自流到低加疏水箱经低加疏水泵打入#3低加水侧入口,#1低加疏水直接流凝汽器扩容器。
除氧器的水位控制是通过轴封加热器出口的除氧器水位调节阀的节流从而改变进入除氧器的凝结水流量来调节的。
FT1:#4低加出口流量变送器;FT2:锅炉给水流量变送器;LS:除氧器水位开关;LT:除氧器水位变送器;I/P:电流压力转换器;SV:电磁阀;ZT:除氧器水位调节阀位置变送器.图 (一)二、除氧器水位调节控制部分除氧器水位控制简图如图(二)所示,系统采用了三冲量串控制和单冲量控制两种方式,以适应不同工况的需要。
测量元件:a)LT:除氧器水箱的运行参数相对比较低(额定:p=0.97MPa、t=176℃),所以在水位的测量部分并没有如汽泡水位测量一样有测量误差修正。
但是为了提高系统可靠性而采用了三个水位变送器取其三者平均值为除氧器的水位反信号。
b)LS:水位开关用来检知水位低1值、水位低2值、水位高1值、水位高2值、水位高3值并触发报警或启动相关保护。
c)FT1:给水流量测量信号来自锅炉协调控制中的给水流量反馈,采用的是节流孔板流量计,三个流量变送器取平均值作为给水流量,并加给水温度的修正。
d)FT2:凝给水进入除氧器的流量测点是按装在#4低加出口。
同样是节流孔板流量计,但是三个流量变送器取中间值为凝结水进入除氧器的反馈,没有温度的修正。
除氧器水位调节介绍分解课件

采用耐腐蚀、耐高温的新型材料, 延长除氧器的使用寿命。
水位调节技术的改进与创新
自适应调节
根据实际运行情况,自动调整水 位,保持稳定运行。
远程监控与诊断
通过远程监控系统实时监测水位, 及时发现并解决故障。
节能减排
优化水位调节技术,降低能耗, 减少排放,符合环保要求。
与其他系统的集成与优化
总结词
在调节除氧器水位时需要关注的一些重要因素和注意事项。
详细描述
在调节除氧器水位时,需要注意以下几点:首先,要确保操作人员具备相应的技能和经验;其次,要密切关注水 位变化,避免出现大幅度波动;最后,要定期对设备进行维护和检查,确保其正常运行。同时,还需要注意安全 问题,如操作过程中的安全防护措施和应急预案的制定。
除氧原理
利用物理或化学方法,使 水中的溶解氧与特定物质 发生反应,从而达到除氧 的目的。
除氧器的工作原理
热力除氧
利用水在不同温度下溶解氧的饱和度 不同,通过加热或降温的方法使水中 溶解氧逸出。
化学除氧
膜法除氧
利用特殊膜材料,使水在通过膜时, 溶解氧被选择性透过,从而达到除氧 的目的。
通过加入化学药剂与水中的溶解氧发 生化学反应,从而降低溶解氧的含量。
防止设备损坏
如果除氧器水位过高或过 低,可能会导致设备过载 或干烧,从而损坏设备。
提高运行效率
合理的水位调节可以提高 除氧器的运行效率,降低 能耗。
水位对除氧效果的影响
水位过低
可能导致除氧效果不佳,因为水 流量不足会影响热交换和化学反 应的进行。
水位过高
可能导致蒸汽空间减小,影响蒸 汽与水的热交换,同样影响除氧 效果。
除氧器水位调节方法
手动调节方法
一体式除氧器水位控制与保护介绍
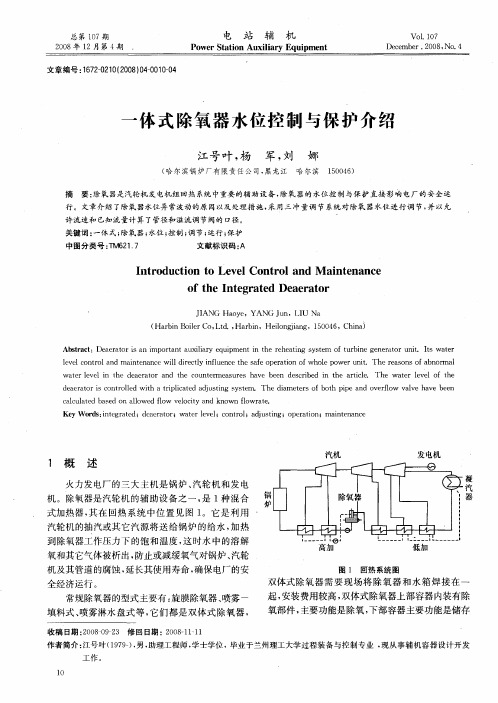
I r d c i n t v lCo r la d M a nt na c nt 0 u t0 o Le e nt o n i e n e
o he I e r t d De e a o f t nt g a e a r t r
JANG o e I Ha y ,YANG u ,L U J n 1 Na
d a rt r s o t l dwi r l ae du t g s se . T eda tr o oh p ea do ef w av a eb e e eao n r l t at pi t a jsi y t ic o e h i c d n m h i mees fb t i n v rl v l h v e n p o e
c lu a e a e n al we lw e o i n n wn f wr t . ac lt d b s d o l o df o v l ct a d k o l y o ae
K yWod : t r t ; e eao ; a e l e ; o t l a j si ; p r t n ma tn n e e r s i e ae d a r tr w tr e l c n r ; du t g o e ai ; i e a c n g d v o n o n
( ri B i r o L d , ri,Heo g ag 50 6 C ia Habn ol , t. Habn eC i nj n .10 4 , hnj l i
Ab ta t sr c :De e a o s a a r t ri n i o t n u i a y e u p e ti h e e t g s s e o u b n e e a o n t t t r mp r a ta x l r q im n n t e r h a i y t m ft r ie g n r t r u i.I s w
除氧器水位自动调节原理

除氧器水位调节系统简介王荣鑫一、除氧器水位调节的意义:除氧器水箱用以保证锅炉有一定的给水储备量,一般要求能满足锅炉额定负荷下连续运行15—20min的给水量。
水位太低因储备量不足而危及锅炉的安全运行,还可能使给水泵入口汽化,导致给水泵不能正常工作;水位太高,可能淹没除氧头而影响除氧效果。
一般要求水位在规定值±100mm—±200mm范围内,所以除氧器设计有水位自动控制系统,并有高、低水位异常报警和连锁保护。
将给水加热到相应除氧器内压力的饱和温度,可以保证气体从水中分离出来,很好地清除氧气。
给水在除氧器中清除氧气的主要机理是加热除氧。
除氧器除了通过用汽轮机抽汽加热给水到沸腾状态以除氧外,还担负着向给水泵不断供水的任务,为了保证给水泵安全运行,即要求避免给水泵入口发生汽化或缺水事故,一定要保证除氧器下部的给水箱保持规定的水位。
除氧器水位过低,除了影响给水泵安全运行之外,甚至会威胁锅炉上水,造成停炉事故;除氧器给水箱水位过高,汽轮机汽封将上水,抽汽管将发生水击,威胁汽轮机的安全运行;因此要设计可靠的除氧器水位自动调节系统。
二、除氧器水位自动调节原理:除氧器水位自动调节系统根据热力系统设计的不同有不同的设计思路。
中小型机组有的采用单冲量单回路调节系统,通过控制化学水补给水门或者低压加热器至除氧器的调节阀来实现,也有采用三冲量控制系统。
大型机都采用全程控制系统,当给水流量从零到一定值(如10%额定负荷)时,系统单冲量水位控制系统,当给水流量大于一定值(如10%额定负荷)时,系统为三冲量水位控制系统,即水位控制器接受三个输入信号:水位信号、化学水流量、给水流量。
两种方式的切换通过逻辑切换实现,控制主凝结水到除氧器的进水阀。
大型机组的除氧器水位为全程控制系统,当给水流量小时,采用单冲量水位控制系统,当给水流量大时切换至三冲量水位控制系统。
三冲量分别为除氧器水位、给水流量、凝结水流量。
下图中为除氧器水位全程控制图。
除氧器液位波动原因分析及处理措施

除氧器液位波动原因分析及处理措施摘要:除氧器正常运行时给蒸汽发生器提供水源,除氧器液位的稳定对保证堆芯的冷却具有重要的意义。
除氧器液位是机组运行的一个重要的控制参数,因为除氧器液位过低,则可能导致给水泵汽蚀,并触发反应堆线性降功率,而除氧器液住过高则会淹没除氧头,不但影响除氧效果,还可能使给水经抽汽管线倒流至汽轮机,引起水击事故,损坏汽机。
关键词:除氧器;液位波动;原因分析;处理措施不论在常规火电厂还是在核电厂中,除氧器液位都是机组运行的一个重要控制参数。
但是由于其存在着较大的延迟特性,除氧器进口存在较多的进水流量来源以及除氧器出口给水流量随着功率的变化而变化等特性,单纯依靠除氧器液位信号对除氧器液位进行控制,已不能满足系统对稳定性、快速性和准确性的要求,往往会引起超调量过大,甚至振荡的情况。
1除氧器液位控制1.1除氧器液位控制模式除氧器水位控制系统的目的是保持除氧器储水箱的水位恒定。
系统包括三个水位控制阀和三个水位控制器,每一个控制阀和控制器都有各自的水位变送器监测除氧器储水箱的水位。
手动开关64321一HS4410A有三个位置“LT4410A,LT4410B,LT4410C”,用来选择三个水位控制器的主、从位置。
当选定一个位置时,两个控制器投入运行:一个控制器在AUTO位置,一个控制器在STANDBY位置。
在AUTO位置的水位控制器用于调节两个由控制开关64321-HS4410C选定在AUTO位置的水位控制阀,在STANDBY位置的水位控制器控制剩下的一个在STANDBY位置的水位控制阀。
STANDBY通道(LT/LC)在除氧器低水位时投入运行。
手动开关64321一HS4410C有三个位置“LCV4207#1,#2;LCV4207#1,#3;LCV4207#2,#3”,用来选择将AUTO/STANDBY水位控制器的控制信号送至相应的水位控制阀。
1.2除氧器液位控制器除氧器液位控制采用的是三冲量、内部串级加前馈的控制方式,三台控制器内部参数设定完全一致。
300MW机组除氧器水位控制系统改进

( ) 改除 氧器水位 调节 阀控制逻 辑 。 2修
正比, 利用这一 变频 调速节 能原理 , 降低转速 可 以大
收 稿 日期 :0 0— 3—1 21 0 1
3 除氧器水位控制 系统的改造
在 单 冲量 阶段 , 氧器水 位 调节 仍 然维 持 原有 除
第 7期
龚咏梅 :0 w 机 组除氧 器水位控 制 系统 改进 3 0M
1 除 氧器 水 位 控 制 系统 缺 陷分 析
1 1 设备 概况 .
湖北 西塞 山发 电有 限公 司一 期 2×3 0M 机 3 W 组为北重 生产 的 N 3 3 0—1 .5 5 0 5 0型 中间再热 77/4/4 凝汽式 汽 轮 发 电机 组 , 用 9 D N 采 L T B一5型 凝 结 水 泵, 湘潭 电机厂生 产 的 Y S 5 0— K L 0 4型 电动 机 , 定 额 功率 1 0 W , 0 0 k 电压 6 V, 转速 1 8 m n k 4 7 / i。机组 正 r 常运行 时 , 2台凝 结水 泵 1台运行 , 1台备 用 。凝 结 水 经凝结水 泵 、 氧器入 口水位调 节 阀 、 压加 热器 除 低 流人除氧 器进行热 力除氧 。 1 2 除氧 器水位控 制 系统 缺 陷分 析 . 传统 除氧器水 位控制 系统有 2个缺 陷 :
至变频器 , 变频 器 控制 除 氧器 水 位 。在机 组停 机 或 减负荷过 程 中 , 调节 阀 又接 过 除氧 器 水位 调 节 的任 务, 变频 器无扰 切换 为控 制凝结 水母管 压力 , 这就是 除氧器水 位控制 系 统采 用新 方 法 之后 的精 妙之 处 ,
既 可使 除氧器人 口水位 调节 阀随着机组 负荷变 化实 现全程调 节 ( 除了 以前 调节 阀 固定 在 5 % 位 置附 消 0 近调节 的弊端 ) 又 可降低 凝结 水母 管 压 力 , 正 实 , 真
除氧器水位单回路控制系统设计

课程设计陈说之阿布丰王创作( 2014-- 2015年度第二学期)名称:控制装置及仪表课程设计题目:除氧器水位单回路控制系统设计院系:自动化系班级: 1204班学号: 201209010313 学生姓名:沈一鸣指导教师:韦根源老师设计周数:一周成绩:日期: 2015年 6月 26日《控制装置与仪表》课程设计任务书一、目的与要求认知控制系统的设计和控制仪表的应用过程.1.了解过程控制方案的原理图暗示方法(SAMA图).2.掌握数字调节器KMM的组态方法,熟悉KMM的面板把持、数据设定器和KMM数据写入器的使用方法.3.初步了解控制系统参数整定、系统调试的过程.二、主要内容1.按选题的控制要求,进行控制战略的原理设计、仪表选型并将控制方案以SAMA 图暗示出来.2.组态设计2.1KMM组态设计以KMM单回路调节器为实现仪表并画出KMM仪表的组态图,由组态图填写KMM的各组态数据表.2.2组态实现在法式写入器输入数据,将输入法式写入EPROM芯片中.3.控制对象模拟及过程信号的收集根据控制对象特性,以线性集成运算放年夜器为主构成反馈运算回路,模拟控制对象的特性.将定值和过程变量送入工业信号转换装置中,以便进行观察和记录.4.系统调试设计要求进行静态调试.静态调试是指系统与生产现场相连时的调试.由于生产过程已经处于运行或试运行阶段,此时应以观察为主,当涉及到必需的系统修改时,应做好充沛的准备及平安办法,以免影响正常生产,更不允许造成系统或设备故障.静态调试一般包括以下内容:l)观察过程参数显示是否正常、执行机构把持是否正常;2)检查控制系统逻辑是否正确,并在适那时候投入自动运行;3)对控制回路进行在线整定;4)当系统存在较年夜问题时,如需进行控制结构修改、增加测点等,要重新组态下装.三、进度计划设计内容分工参考:小组每人均介入控制方案的设计,了解方案的KMM仪表实现方法、实验系统组成、系统调试和数据记录的过程.在此基础上小组成员可作如下具体分工:预习KMM 法式写入器使用并具体进行EPROM芯片的制作(2人);设计实验接线原理图,进行实验接线并熟悉掌握KMM面板功能及数据设定器使用(1-2人);确定记录信号并利用工业控制信号转换设备进行记录信号的组态和实验曲线的打印工作(1人).四、设计(实验)功效要求1.完成系统SAMA图和KMM组态图,附出控制系统的调试曲线和控制参数.2.对系统设计过程进行总结,完成并打印设计陈说.五、考核方式1.每人学习、理解设计书内容,小组讨论设计题目,确定个人分工.完成控制对象模拟的电路设计图;控制战略设计方案、组态图、列写出KMM数据表;需记录的曲线及接线图.在上实验室前,每人手写出自己的工作内容.(20分)2.实验室部份:按设计内容进行法式写入、模拟控制对象的运放回路接线、记录曲线接线及组态.控制回路调试、PI参数整定、静态曲线记录打印;设计结果现场辩论.(60分)3.撰写设计陈说.根据分工内容允许有偏重.要求格式规范,内容详实,有原创性.(20分)六、选题参考0 天燃气压力控制系统(设计书中实例)(控制系统特点:单回路控制方案;有自平衡能力正的被控对象)1 除氧器水位单回路控制系统设计(提示:单回路控制方案;无自平衡能力正的被控对象)2 炉膛压力系统死区控制系统设计(提示:单回路PID死区控制方案;有自平衡能力负的被控对象)3 过热汽温串级控制系统设计(提示:串级控制方案;主、付对象均为有自平衡能力负的被控对象) 4 锅炉给水三冲量控制系统设计(提示:串级三冲量控制方案;被控对象为无自平衡能力正的被控对象) 5 风煤比值控制系统设计(提示:比值控制方案;被控对象设为有自平衡能力正的被控对象)6 主汽压力前馈控制系统设计(提示:单回路前馈控制方案;被控对象为有自平衡能力正的被控对象)学生姓名:指导教师:韦根原2014年6月23日除氧器水位单回路控制系统设计一、课程设计(综合实验)的目的与要求1.认知控制系统的设计和控制仪表的应用过程.2.了解过程控制方案的原理图暗示方法(SAMA图).3.掌握数字调节器KMM的组态方法,熟悉KMM的面板把持、数据设定器和KMM数据写入器的使用方法.4.初步了解控制系统参数整定、系统调试的过程.二、设计(实验)正文1. 由控制要求画出控制流程图.对如上图所示的除氧器水位单回路控制系统,要求对除氧器进行单变量定值控制.除氧器水位经水位变送器丈量后,由KMM模入通道送至调节器中.调节器输出AO1经A/D转换通道控制调节阀,控制除氧器内水位.控制要求:当调节器的给定值SP和丈量值PV之偏差超越给定的监视值(15%)时,调节器自动切换至手动(M)方式.在偏差允许的范围内(15%),允许切入自动(A)方式.2. 确定对可编法式调节器的要求.控制系统要求一路模拟量输入(模入)通道输入压力信号,一路模拟量输出(模出)通道输出控制信号控制压力调节阀.而KMM具有5路模入通道、3路模出通道(其中第一路模出通道AO1可另外同时输出一路4~20mA电流信号),可满足本系统控制要求.3. 设计控制原理图(SAMA图).根据控制对象的特性和控制要求,进行惯例的控制系统设计.SAMA图如下:4. 绘制KMM 组态图并填写KMM 控制数据表KMM 组态图: 表格数据:PPAR315%PPAR40.0KMM组态通过填入以下数据表格实现.①基本数据表PROM管理编号:作芯片记号,指定一个四位数.调节器类型:0-1PID(A/M)1;1-PID(C/A/M);2-2PID(A/M);3-2PID(C/A/M).上位计算机控制系统:0-无通信;1-有通信(无上位机);2-有通信(有上位机). 上位机故障时切换状态:0-MAN方式;1-AUTO方式.②输入处置数据表输入使用:0-不用;1-用.按工程显示小数点位置:0-无小数;1-1位小数;2-2位小数;3-三位小数. 开平方处置:0-直线;0-开平方处置.开方小信号切除:给AI1~AI5设定的开方信号切除值.传感器故障诊断:0-无诊断;1-诊断.③PID数据表(PID 把持类型:0-惯例PID ;1-微分先行PID.PV 跟踪:定值跟踪功能,0-无;1-有.⑤可变变量表)百分型数据:缺省值为0.0;给定范围为:-699.0~799.9%. 时间型数据:缺省值为0.00min ;给定范围为:0.00~99.99min.⑥输出处置数据表规定模拟输出信号和数字输出信号从哪个模块引出.⑦运算模块数据表用来规定模块的类型及模块相互之间的连接.)5. 掌握KMM 法式写入器的使用方法并用法式写入器将数据写入EPROM 中.法式写入器具有制作可编程调节器的用户PROM 所需要的全部功能,还能够打印出法式的内容并具有法式写入器自己的自诊断功能.根据数据表中所填写的代码和数据用KMM 法式写入器进行编程.法式写入器的具体使用方法拜会附录中说明.按表格次第逐项输入数据.法式输入并检查修改完毕后,按“WRIT ”、 “ENT ”键,将法式写入EPROM 中.写入法式后的EPROM 移插到KMM 调节器的用户EPROM 中,即可进行整机和系统调试工作. 6. 按控制系统模拟线路原理图接线.由运算放年夜器构成的反馈网络模拟控制对象特性,构成控制系统的模拟控制回路.系统原理接线图如下图所示:图4 模拟控制回路接线图模拟的控制对象采纳由两个线性运算放年夜器构成的一阶滞后反馈环节串联构成,以加年夜对象的滞后时间.控制回路中丈量值和设定值信号分别送入工业控制信号转换器中的A/D 模拟量输入通道中进行显示和记录.运算放年夜器构成的是一阶滞后特性的反馈回路.运放的反馈网络是电阻和电容的并联,等效阻抗sC R R sC R s C R Z f f f f f f f f +=+⨯=111,输入网络的等效阻抗11R Z =,这个放年夜器构成的闭环特性传递函数sC R R R Z Z s W f f f f +==1/)(11,设定1R R f =,则sC R s W f f +=11)(.因此,这是一个滞后时间ff C R T =的一阶滞后环节.设计实验中选取K R R f 1001==,μ47=f C ,计算得这个滞后环节的滞后时间s T 7.4=.因滞后时间较小,设计中将这样的两个环节串联而成.7. 进行控制参数调整,对控制系统各项功能进行模拟测试并记录定值扰动控制曲线.(1) 上电准备.(2) 通电.使调节器通电,初上电,调节器先处于“联锁手动”方式.(3) 运行数据简直认.用“数据设定器”来确认,对运行所必需的控制数据、可变参数等是否被设定在规定值.需要时可进行数据的设定变更(4)按控制面板上的R(Reset,复位)按钮,解除“联锁方式”后,调节器可进行输出把持、方式切换等正常的运行把持.(5)组态工业控制信号转换设备的显示画面,以便记录调试曲线.(6)通过“数据设定器”进行PI参数的调整,使控制品质到达控制要求(衰减率为75%-90%).记录定值扰动10%时的静态过程曲线.(7)打印过程曲线图3 除氧器综合剖面图1—加热器来水进口; 2—至凝结器排气口; 3—喷口;4—汽源管; 5—耙管设计实验陈说自动化1101 EPROM编号姓名:段贵金专业、班级:学号: 2 同组人余有名陶王东郭铮设计名称除氧器水位单回路控制系统设计三、课程设计(综合实验)总结或结论本周的控制装置及仪表的课程设计给我留下的印象非常深刻,虽然课表上安插的时间是一周,但因为我们班是第一组,所以是留给我们的时间只有周一的下午和晚上.时间如此紧迫让我找到了备战考试的感觉,正因为如此所以学习效率较高,做好了事先的准备工作,比力顺利的完成了实验.在这个过程中我巩固了之前学习的理论知识,接触到了新的实验方法,熬炼了入手能力,让我受益匪浅.我们小组选择的题目是除氧器水位单回路控制系统设计,通过设计又复习了一下过程控制方案用SAMA图暗示原理图的方法,进一步掌握了数字调节器KMM的组态方法,组态图的绘制,各个组态元件模块的功能.熟悉了KMM的面板把持、数据设定器和KMM数据写入器的使用方法,以及如何将法式烧制到EPROM.另外,对除氧器水位调节控制有了一个比力系统的了解.再次熟悉了CAE2000系统的把持.在本次课程设计中,我是我们小组的组长,主要负责的任务是KMM组态图绘制理解,以及组态数据表的建立,和数据写入EPROM工作.因为KMM数据写入器的使用是新的内容,因此相比较力难一些,在实验把持前,通过预习,我对组态图有了深刻的理解,对其中各个功能模块也再次进行了研究,另外对系统的接线,和整个系统设计也年夜概熟悉了一下,并交给我们小组的其它成员负责.做实验确当天,两个同学负责联线和检查,我和另一个同学负责KMM法式写入.所有数据表我们已经提前填写好了,在和旧的芯片核对之后确认没有问题.输入法式和写芯片的过程在老师的指导下也进行的比力顺利.在后来的参数调节过程中,因为比例带的初值设置的太年夜招致反应过慢,后来在我们整个小组的努力下最终做好了整定.本次实验让我体会到了团队合作的力量,在PID参数调节过程中,又复习了参数对系统性能的影响.总而言之,本次课程设计对我来说还是相当有收获的.通过本次课程设计,有一点给我的感触很深,我们已经拥有了一定的学习能力,但在遇到问题之后解决问题的能力非常欠缺.一方面是我们对知识掌握的不够灵活透彻,更主要的是我们没有养成良好的习惯,遇到问题就只会问老师,却不会拿着万用表看看是哪里出问题了.在以后的实验或是工作中,我一定要灵活运用所学到的知识,做到耐心细致而且要坚持一贯严谨认真的态度.在遇到困难时,要积极思考,复查每个环节,逐个突破,找到原因,寻求解决方案.最后,感谢韦老师的耐心指导和帮手.四、参考文献[1] 王秀霞韦根源主编《控制仪表与装置试验及课程设计指导书》华北电力年夜学 2006年4月[2] 吴勤勤主编《控制仪表及装置》.化学工业出书社第三版[3] 金以慧主编方崇智审校《过程控制》清华年夜学初版 1993年4月。
除氧器水位调节介绍

70.00 1000.00 60.00
750.00
50.00
流量(t/h)
40.00 500.00 30.00
250.00
20.00
10.00 0.00 0.00 1:53:46 -250.00 凝结水流量 主PID输出 给水流量 副PID输出 1:55:12 1:56:38 1:58:05 1:59:31 2:00:58 2:02:24 2:03:50 2:05:17 2:06:43 -10.00
据除氧器水位设定值调节除氧器水位主、副调节阀。
单冲量调节器
2、三冲量调节 在总给水流量大于250t/h时,系统切换到三冲量调节。在串级三冲量系统中
,除氧器水位主调节阀PID为主调节器,负责维持除氧器水位在设定值;除氧
器水位副调节阀PID为副调节器,其功能是维持进入除氧器的凝结水量与给水 流量的基本平衡。首先主调节器将除氧器水位与设定值进行计算,将总给水 流量作为前馈信号进行输出补偿,得出的值作为副调节器的输入,并与除氧 器进口凝结水流量进行比较,最后得出一个数值,该数值再经折线函数计算 后,作为除氧器水位主、副调阀手操器的输入指令。
3、总给水流量大于250t/h,且除氧器水位副调节阀全开后仍无法满足除氧器 进口凝结水流量需求时,除氧器水位主调节阀开启。
120
调节阀开度(%)
100 80 60 40 20 0 -20 0 100 200 300 400 500 600 凝结水流量(t/h) 主调开度 副调开度
四、除氧器水位主、副调节阀如何投入自动?
图5
时间有限,水平不足,请各位不吝赐教。
谢谢!
图4中,除氧器水位经主调 阀调整稳定后,第二次尝 试投入主调阀自动,自动 投入后,主调阀迅速开大。 怀疑为副调阀全开后,调 节器发出开大主调阀的指 令,而实际主调阀在手动 位置,该指令不断增大, 最终导致主调阀在自动投 入后立即全开,实际主调 阀PID输出值也为100,对 应主调阀全开指令。
除氧器运行调整
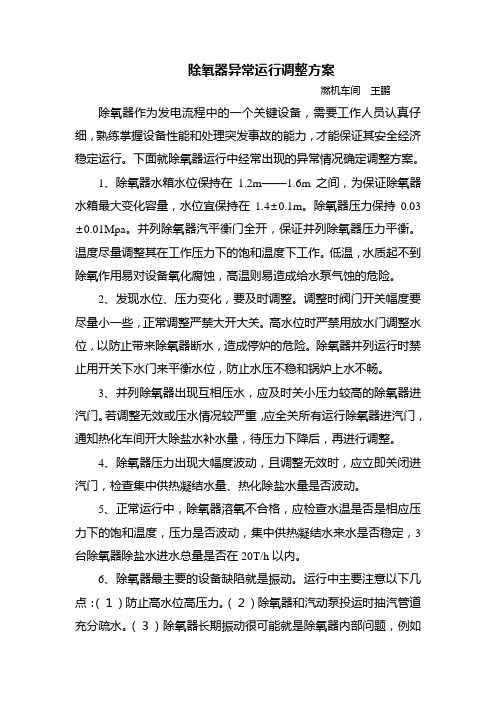
除氧器异常运行调整方案燃机车间王鹏除氧器作为发电流程中的一个关键设备,需要工作人员认真仔细,熟练掌握设备性能和处理突发事故的能力,才能保证其安全经济稳定运行。
下面就除氧器运行中经常出现的异常情况确定调整方案。
1、除氧器水箱水位保持在1.2m——1.6m之间,为保证除氧器水箱最大变化容量,水位宜保持在1.4±0.1m。
除氧器压力保持0.03±0.01Mpa。
并列除氧器汽平衡门全开,保证并列除氧器压力平衡。
温度尽量调整其在工作压力下的饱和温度下工作。
低温,水质起不到除氧作用易对设备氧化腐蚀,高温则易造成给水泵气蚀的危险。
2、发现水位、压力变化,要及时调整。
调整时阀门开关幅度要尽量小一些,正常调整严禁大开大关。
高水位时严禁用放水门调整水位,以防止带来除氧器断水,造成停炉的危险。
除氧器并列运行时禁止用开关下水门来平衡水位,防止水压不稳和锅炉上水不畅。
3、并列除氧器出现互相压水,应及时关小压力较高的除氧器进汽门。
若调整无效或压水情况较严重,应全关所有运行除氧器进汽门,通知热化车间开大除盐水补水量,待压力下降后,再进行调整。
4、除氧器压力出现大幅度波动,且调整无效时,应立即关闭进汽门,检查集中供热凝结水量、热化除盐水量是否波动。
5、正常运行中,除氧器溶氧不合格,应检查水温是否是相应压力下的饱和温度,压力是否波动,集中供热凝结水来水是否稳定,3台除氧器除盐水进水总量是否在20T/h以内。
6、除氧器最主要的设备缺陷就是振动。
运行中主要注意以下几点:(1)防止高水位高压力。
(2)除氧器和汽动泵投运时抽汽管道充分疏水。
(3)除氧器长期振动很可能就是除氧器内部问题,例如零部件脱落、喷嘴堵塞、筛盘倾斜等,应及时联系检修处理。
0正常运行中,除氧器出现振动,应关小进汽门直至全关,检查进水是否波动,待振动消除后,再逐渐开启进汽门。
7、正常运行中,除氧器水封冲开,应查明原因,此时须将除氧器压力降至零后,水封才能封住。
除氧器内部结构ppt正式完整版
除氧器凝结水喷嘴
给水泵再循环管
内部封头加热管道及高加疏水管 道
高加疏水管道
连排至除氧器管道
No Image
给水泵下水口
No Image
除氧器加热管道及防逆流管
No Image
除氧器加热管道及高加疏水管道
15MPa,投辅汽供。
6)低Ⅱ值水位:-900mm停给水泵
内部封头加热管道及高加疏水管道
心线为0位)。 2、除氧器水位控制值:
• 5)低Ⅰ值水位:+400mm报警。
• 6)低Ⅱ值水位:-900mm停给水泵
3、除氧器压力控制值:
• 1)压力高:1.2MPa,报警。 • 2)压力高高:1.35MPa,安全门动作。 • 3) 压力低:0.15MPa ,报警。 • 4)四抽压力低:0.15MPa,投辅汽供。 • 5)四抽压力高于0.15MPa,切本机四抽。
除氧器内部结构
优选除氧器内部结构
2、除氧器水位控制值:
• 1)高Ⅲ值:+1100mm,联关供除氧器四抽 逆止门 及电动门。 4)正常水位:+300mm--+500mm(除氧器中心线为0位)。
6)低Ⅱ值水位:-900mm停给水泵 2、除氧器水位控制值:
• 2)高Ⅱ值:+900mm,开溢流门。 6)低Ⅱ值水位:-900mm停给水泵
2)高Ⅱ值:+900mm,开溢流门。
2、除氧器水位控制值:
15MPa,投辅汽供。
3)高Ⅰ值:+800mm,报警。 2)高Ⅱ值:+900mm,开溢流门。 2)高Ⅱ值:+900mm,开溢流门。 6)低Ⅱ值水位:-900mm停给水泵
Image
内部封头加热管道及高加疏水管道
660MW机组除氧器水位控制方式逻辑优化

660MW机组除氧器水位控制方式逻辑优化摘要:随着科学技术的不断进步与发展,发电厂中的各种设备也在不断的更新与发展。
对于660MW机组而言,其除氧器的水位控制方式至关重要。
本文以某发电厂660MW机组除氧器的三冲量控制方法和压力调节方法为例,阐述一下该水位调节模式和压力调节模式目前存在的问题,随后针对中两种模式存在的问题给出除氧器水位控制的逻辑优化,从而不断提高水位调节模式下的负荷段。
以此仅供相关人士进行交流与参考。
关键词:660MW机组除氧器;水位控制方式;逻辑优化引言:该发电厂660MW机组的除氧器水位控制方式主要包括水三冲量调节方式和压力调节模式,最常规的还是水调门节流控制。
但是随着近些年科学技术的不断发展,当除氧器上水门在全部打开的情况下,通过凝泵变频控制凝结水泵的转速能够完美控制除氧器水位,但是其承载的负荷范围太短,消耗能量较多,因此需要对这种三冲量水位控制方法进行改进,从而增加承载的负荷,降低能量损耗。
一、最初除氧器水位的控制方法和存在的问题(一)原除氧器三冲量水位控制方法该发电厂660MW机组的除氧器水位控制方法主要包括压力控制和三冲量水位控制这两种模式。
其中压力控制模式需要保证凝泵控制结水压力保持在1.8MPa 之上,之后需要利用水主调阀对除氧器水位进行控制和调节,从而改变除氧器的水位。
而对于三冲量水位控制模式而言,需要在除氧器上水主调阀在全开的状态,利用凝泵变频器来对除氧器水位进行调节[2]。
除氧器的水位控制模式见图一。
(图一)除氧器的三冲量水位控制模式(二)原除氧器三冲量水位控制方法存在的问题原除氧器水位控制方法存在的问题主要包括消耗能量多和模式转换慢。
首先对于660MW机组的耗能情况而言,当机组负荷高于450MW时,除氧器上水调节的节流损失较小,而机组负荷小于450MW时,机组在该负荷下运行的时间越长,其除氧器上水调节的节流损失越大,从而导致凝泵耗能增加。
对于模式转换慢而言,主要是针对水位调节模式和压力调节模式的转换速度较慢。
水位控制中的单冲量和三冲量
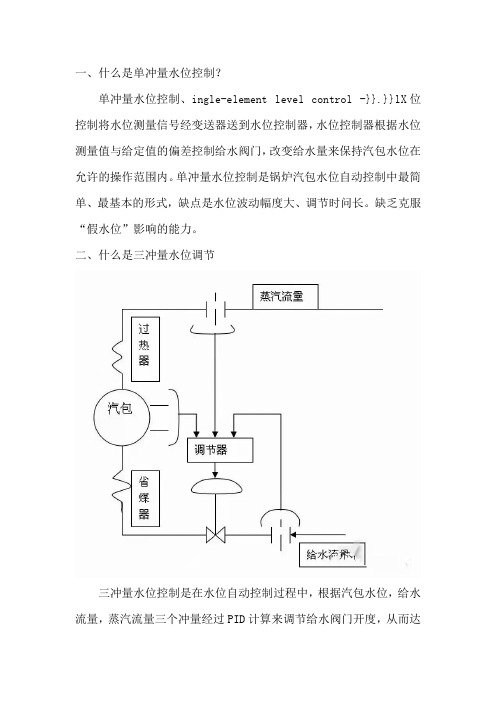
一、什么是单冲量水位控制?单冲量水位控制、ingle-element level control -}}.}}lX位控制将水位测量信号经变送器送到水位控制器,水位控制器根据水位测量值与给定值的偏差控制给水阀门,改变给水量来保持汽包水位在允许的操作范围内。
单冲量水位控制是锅炉汽包水位自动控制中最简单、最基本的形式,缺点是水位波动幅度大、调节时问长。
缺乏克服“假水位”影响的能力。
二、什么是三冲量水位调节三冲量水位控制是在水位自动控制过程中,根据汽包水位,给水流量,蒸汽流量三个冲量经过PID计算来调节给水阀门开度,从而达到自动控制给水流量的目的。
一般来说,三冲量调节是针对汽包调节的,其三个冲量分别是汽包液位,给水流量和蒸汽流量。
从结构上来说,三冲量调节实际上是一个带前馈信号的串级控制系统。
液位控制器LC与流量控制器FC构成串级控制系统。
汽包液位是主变量,给水流量是副变量。
副变量的引入使系统对给水压力(流量)的波动有较强的克服能力。
蒸汽流量的信号作为前馈信号引入。
因为蒸汽流动的波动是引起汽包液位变化的一个因素,是干扰作用,蒸汽流动波动时,通过测量引入FC,使给水流量作相应的变化,所以这是按干扰量进行控制的,是前馈作用。
三、什么是除氧器水位的单冲量调节和三冲量调节。
在除氧器水位控制过程中,以除氧器水箱水位做为反馈信号的调节方式,称为除氧器水位的单冲量调节。
以除氧器水位,给水流量和凝结水流量三个信号共同参与的调节方式,称为三冲量调节方式。
四、单冲量水位调节和三冲量水位调节的优缺点是什么?单冲量水位自动调节系统是最简单的调节方式,它是按汽包水位偏差来调节给水调节阀开度的。
其优点是调节简单,只有一个水位信号做为调节量。
单冲量水位调节方式的主要缺点是当蒸发量或蒸汽压力突然变化时,会引起炉水中蒸汽含量迅速变化,使得锅炉汽包产生虚假水位,导致给水调节阀误调。
因此,单冲量调节一般用于负荷比较稳定的小容量锅炉。
三冲量水位自动调节系统是较为完善的调节方式,该系统中除汽包水位信号H外,还有蒸汽流量D和给水流量G。
除氧器的操作规程
除氧器的操作规程
1.除氧器的工作原理
水中溶解的氧和二氧化碳对热力设备有强烈的腐蚀作用,因此必须把它们除掉。
气体在水中的溶解度与水的温度和水面上的压力有关。
温度越高,气体在水中的溶解能力越小,水温升高到饱和温度时,水中溶解的气体就会全部放出。
水面上的气压越小,气体在水中的溶解能力也越小,水面上的气压降低到当时水温所对应的饱和气压时,或由于气压降低而使水沸腾,溶解的气体也全部放出。
2.除氧器的启动
1)打开除盐水进除氧器总阀,把水液位控制50%,投用自控状态。
2)打开加热蒸汽阀,再缓慢打开减压阀前后隔离阀进行暖管疏水。
3)缓慢打开蒸汽旁路进行加热除氧。
当压力达到0.012~0.015MPa(表压)时,投入自控,将蒸汽调节阀前后隔离阀全开,同时关闭旁路阀,将压力控制在0.2MPa0
4)待除氧器水箱液位至2/3水位时,打开除氧水箱放水阀,排除锈水和杂质。
3.除氧器运行中的检查与维护
1)严格控制各运行指标,发现问题及时处理和汇报。
2)各阀门应开关灵活,并在丝杆处常加油,填料处不泄露。
注意各种仪表的运行工况,发现问题及时联系有关人员处理。
4.除氧器的停运
当给水泵停止运行时,除氧器也应停止运行,其步骤如下:1)关闭蒸汽调节阀前后边阀。
2)关闭除氧器进水调节阀前后边阀。
3)关闭除氧器出口阀。
4)当除氧器全停,应将汽水总阀关闭,打开有关的疏水阀,使其处于准备启动状态。
5)若需检修时应将水箱的水放掉。
6)在冬季应做好设备,阀门,管道和仪表的防冻工作。
5.除氧器的故障处理
1)除氧器满水。
除氧器水位调节介绍分解

除氧器水位调节介绍分解除氧器是一种用于去除给水中溶解氧的设备,目的是为了防止溶解氧对锅炉系统的腐蚀和腐蚀产物的形成。
除氧器水位调节是除氧器正常运行的重要参数之一,合理的调节可以保证除氧器的正常工作和系统的安全稳定运行。
本文将对除氧器水位调节进行详细介绍。
一、除氧器水位调节的原理除氧器水位调节的原理是通过调节给水和排放水的流量来实现。
通常情况下,给水流量要大于排放水流量,这样才能保证除氧器内的水位稳定在设定值范围内。
当给水流量增加时,排放水流量也要相应增加,以保持除氧器内部的水位不变。
二、除氧器水位调节的设备1.节流阀节流阀是通过改变管道的截面积来调节流量的设备。
其工作原理是将流体通过孔口进行速度变换,以达到流量的控制。
节流阀可以根据不同的工作原理分为溢流式节流阀和活塞式节流阀。
溢流式节流阀是通过调节溢流量来改变流量,而活塞式节流阀则是通过改变活塞的开合程度来控制流量。
节流阀可以用于调节给水流量或排放水流量,以达到对除氧器水位的调节。
2.调节阀调节阀是一种通过改变阀门开度来调节流量的设备。
调节阀可以根据不同的工作原理分为手动调节阀和自动调节阀。
手动调节阀需要由人工来进行开度的调整,而自动调节阀则可以根据设定的参数自动调节阀门的开度。
调节阀通常用于对给水流量进行调节,以达到对除氧器水位的调节。
3.流量控制器流量控制器是一种用来控制流体流量的设备。
流量控制器通常由流量传感器和控制器组成,可以根据设定的参数来调节阀门的开度,实现对流量的精确控制。
流量控制器可以根据需要安装在给水或排放水管道上,以实现对除氧器水位的调节。
三、除氧器水位调节的步骤1.设置除氧器的水位设定值。
根据系统的运行要求和除氧器的容量来确定水位的设定值。
2.根据给水和排放水的流量来计算出合理的流量比。
根据系统的运行情况和设备的特性,计算出合理的流量比,确定给水和排放水的流量比例。
3.根据计算出的流量比,调节节流阀和调节阀的开度,以实现给水和排放水的流量控制。
PLC除氧器水位控制系统设计 梯形图 流程图

PLC除氧器水位控制系统设计+梯形图+流程图摘要:随着电力增长的需要,我国的火电建设如火如荼。
锅炉参数的提高和容量的增大,锅炉的用水量也将进一步增大,这给除氧器的除氧控制提高了难度。
除氧器是锅炉以及供热系统的关键设备之一,在锅炉的给水处理过程中,除氧是非常关键的环节,所以对除氧器内的水位控制,就能更好的控制除氧器的出水的含氧量。
传统液位控制不能进行远距离集中控制,自动化程度很低,调节精度比较差等缺点,而且单靠人工操作不能适应,控制系统改造的必要性随着科学技术的不断进步而提高,被控对象的复杂程度越来越高,人们对控制精度的要求也不断提高。
本论文针对除氧器液位控制这一课题进行讨论与设计研究,以力控为平台设计监控系统,对除氧器内部液位进行控制,实现除氧水位控制的稳定和快速作用,保证工艺的稳定和能源的充分利用。
6091关键词:除氧器液位;水位调节控制;单冲量;Deaerator liquid level control systemAbstract : To meet the rising demand for electricity, the construction of thermal power in our country developed rapidly these years. As both the parameters and capacity of boiler become higher and higher, the water consumption of boiler increases at the same time, which also means a stricter requirement for the deaerator. Deaertor is one of the most important apparatuses in the boiler and heat supply system. During the process of the water supply of boiler, deaeration is an extremely critical point. Therefore, a good liquid level control of the deaerator can definitely improve the control of oxygen level in the water supply of boiler. The traditional liquid level control cannot be centralized control. The automation degree is very low,and regulation accuracy is poor. It cannot be adapted only by manual operation. The necessity of the transformation of the control system is improving with the increasing progress of science and technology. The controlled objects are becoming more and more complex. Therefore, peopleneed to constantly improve the control precision.This paper focuses on the topic of liquid level control of deaerator. With the force control for the platform design of monitoring system, we can control the liquid level of deaerator. That can realize the stable and fast control, ensure the stability of the technology processing and the full utilization of the energy.4.2.1电力行业制备出水工艺的种类134.2.2三种制备电力锅炉补给水系统用超纯水的工艺比较145控制仪表简介165.1变送器165.2控制器165.2.1概述165.2.2比例、积分、微分运算特点:17 5.3执行器175.3.1概述175.3.2执行机构的选型186除氧器水位控制系统196.1除氧器水位控制的任务196.2测量部分196.2.1差压式水位计196.3变送部分216.3.1差压变送器(电容式差压变送器)21 6.4控制部分226.4.1控制方式226.4.2单冲量控制系统236.5执行部分246.5.1执行机构246.5.2调节机构246.6除氧器水位控制系统总体设计方案24 7除氧器水位控制系统设计步骤267.1创建工程267.2创建数据库点参数277.3创建窗口297.4创建图形对象307.5动画连接307.6脚本程序337.7运行377.8实时曲线387.9历史报表397.10报警记录427.11PLC的选型与连接44(1)用状态空间法对多输入多输出复杂系统建模,并进一步通过状态方程求解分析,研究系统的可控性、可观性及其稳定性,分析系统的实现问题;(2)用变分法、最大(最小)值原理、动态规划原理等求解系统的最优控制问题;其中常见的最优控制包括时间最短、能耗最少等等,以及它们的组合优化问题;相应的有状态调节器、输出调节器、跟踪器等综合设计问题;(3)最优控制往往要求系统的状态反馈控制,但在许多情况下系统的状态是很难求得的,往往需要一些专门的处理方法,如卡尔曼滤波技术来求得。
除氧器水位控制中的调节阀自动切换逻辑(1)

收稿日期: 20060117除氧器水位控制中的调节阀自动切换逻辑冯宗杭(粤电静海发电有限公司,广东惠来 515223) 在大型机组除氧器水位控制系统中,通常主管道和旁路管道都配备有调节阀(在凝汽器热井补充水回路和主给水管路上也常采用这种方式)。
在机组起动和带低负荷阶段,通过旁路管道的调节阀(小阀)控制除氧器水位;在机组带较大负荷时,通过主管道的调节阀(大阀)控制除氧器水位。
旁路管道的最大流量一般为主管道最大流量的15%~30%。
在低负荷下使用小阀,在高负荷下使用大阀,避免了大阀在小开度下较长时间运行,减小了大阀的磨损,和节流损失,提高了机组效率。
采用大小两个调节阀控制同一流量,在手动操作情况下,不存在任何问题,但在自动控制情况下,则必须要考虑以下问题:(1)两个调节阀应可自动手动双向无扰切换;(2)在手动情况下两个调节阀开度可多种组合;(3)尽量减少系统的节流损失。
静海发电公司600MW超临界机组除氧器水位控制两个调节阀可由控制系统自动进行切换,系统原理见图1。
图1中A为可由运行人员手动操作的除氧器水位设定值,其后分别为防止设定值变化时对系统冲击过大的速率限制器,以及为了防止运行人员误操作的最大和最小设定值限制;PID1为低负荷下小阀使用的单冲量调节器,PID2为高负荷下大阀使用的单冲量调节器,PID3为高负荷下大阀使用的三冲量调节主调节器,PID4为高负荷下大阀使用的三冲量调节副调节器。
设计在低负荷下采用单冲量控制除氧器水位,在高负荷时采用三冲量控制除氧器水位,其差别仅在于把大阀和小阀所使用的调节器完全分开,使调节器跟踪方便:PID1跟踪小阀的控制指令,PID2和PID4跟踪大阀的控制指令,PID3跟踪凝结水流量和锅炉总给水流量之差。
图1 除氧器水位控制原理为了尽量减少系统的节流损失和防止机组在工况稍有变化时两个阀门来回切换,单冲量和三冲量控制的切换采用按机组负荷大小进行切换并带有滞环,即当大于25%机组额定负荷时切换到三冲量控制,小于20%机组额定负荷时切换到单冲量控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程实验总结报告
实验名称:除氧器水位控制系统实践
课程名称:专业综合实践:大型火电机组热控系统设计及实现(3)
1 概述
1.1 除氧器工作原理
除氧器的主要作用是除去锅炉给水中的氧气和其它不凝结气体,以保证给水的品质。
若水中溶解氧气,就会使与水接触的金属被腐蚀,同时在热交换器中若有气体聚积,将使传热的热阻增加,降低设备的传热效果。
因此水中溶解有任何气体都是不利的,尤其是氧气,它将直接威胁设备的安全运行。
在火电厂采用热力除氧,除氧器本身又是给水回热系统中的一个混合式加热器,同时高压加热器的疏水、化学补水及全厂各处水质合格的高压疏水、排汽等均可汇入除氧器加以利用,减少发电厂的汽水损失。
在双鸭山600MW火电机组中使用的是旋膜式除氧器(又称膜式除氧器及水膜式除氧器),这是一种新型热力除氧器,是用汽轮机抽汽将锅炉给水加热到对应除氧器工作压力下的饱和温度,除去溶解于给水的氧及其它气体,防止和降低锅炉给水管、省煤器和其它附属设备的腐蚀。
可用于定压、滑压等方式运行,并且具有运行稳定,除氧效率高,适应性能好等特点。
适用于各类电力系统锅炉、工业锅炉给水及热电厂补给水的除氧旋膜改进型除氧器是近年来研究并推广的一种全新结构除氧器。
其设计主要是将原射流式改为旋射膜式,是集旋膜及泡沸缩合为一体的高效能新型除氧器,具有除氧效率高,换热均匀,耗气量小,运行稳定,适应性能好,对水质、水温要求不苛刻等优点,而且可超出运行。
除氧器水位过高:大量水从溢水管排出,造成工质和热量损失;造成除氧器内工作压力不稳定及设备安全;水位过高可能会淹没除氧头,影响除氧效果。
除氧器水位过低:使给水泵进口压力降低,造成给水泵汽化,严重时会造成给水泵损坏危及机组安全。
因此维持除氧器水位稳定十分重要。
1.2 定压运行滑压运行
除氧器的定压运行即运行中不管机组负荷多少,除氧器始终保持在额定的工作压力下运行。
定压运行时抽汽压力始终高于除氧器压力,用进汽调节阀节流调
节进汽量,保持除氧器额定工作压力。
除氧器加热蒸汽压力随机组负荷和抽汽压力变化而变化的运行方式,称为除氧器滑压运行。
即:启动时,除氧器保持最低恒定压力,负荷增加到额定值时,除氧器达到最高工作压力;机组负荷变化时,除氧器的工作压力随抽汽压力而变。
2 控制原理
2.1 除氧器DCS画面
经由低加加热过的凝结水输送至除氧器,在除氧器中经过被汽机抽汽进行加热后,分离出水中的氧气。
除氧后的水汇集到除氧器的水箱中,再由给水泵打出送至高加、省煤器,氧气则排出大气。
除氧器的组态画面如下图所示,低加来的凝结水流入除氧器,给水泵将除氧器水箱中的水打出,除氧器疏水阀的作用是当除氧器水位较高时紧急疏水。
图2-1 除氧器水位控制DCS画面
2.2 控制逻辑
除氧器水位控制分为旁路控制和主路控制。
旁路控制采用单回路控制策略,控制器采用PID控制器。
主路控制又分为单冲量控制(单回路控制)和三冲量控制(串级控制),单冲量和三冲量可以随时切换。
在除氧器水位主路控制回路中,控制量为除氧器水位主调节门开度,被控量为除氧器水位。
单回路控制时,除氧器水位作为过程量送入PID调节器,通过与设定值形成
偏差进行调节。
串级控制时,以除氧器水位为主调,作为过程量送入主调节器,其输出作为副调节器的设定值,副调节器的过程量为除氧器入口凝结水流量,其输出送入手操站后形成除氧器水位调节门指令,调节除氧器水位调节门开度来调节除氧器水位。
图2-2 除氧器水位控制逻辑
3 对象特性
为了得到对象的特性,在手动状态下,通过对除氧器水位调节门阀位的阶跃变化,绘制除氧器水位和凝结水流量的阶跃响应曲线,进而得到近似的对象特性。
将疏水阀阀位由72%调小到69%,得到的阶跃响应曲线如下,红色表示实际水位的变化曲线,黄色表示阀位开度变化。
除氧器的控制系统有两个回路,内回路的被控对象为除氧器水位调节门开度与除氧器入口凝结水流量关系,这是一个比例关系:
1()115G s =
外回路是除氧器入口凝结水流量与除氧器水位关系,这是一个非自衡对象:
()1()()y s W s s Ts μ== 式中,()2121205848460y T t ∆-=
==∆-⨯ 4 PID 参数整定
4.1 控制器正反作用
在一个控制回路中,为了保证回路是负反馈作用,各环节放大系数乘积必须为负,所以若控制对象为正对象,则控制器为反作用;反之若控制对象为负对象,则控制器为正作用。
副调节器:当调节阀增大时,除氧器入口凝结水流量增大,故内回路被控对象为正对象,所以副调节器作用方式为反作用方式。
主调节器:除氧器入口凝结水流量增加,除氧器水位增加,故主被控过程放
大为正对象,所以主调节器作用方式为反作用方式。
4.2 实验步骤
1.原PID参数条件下,系统投入运行后,根据系统自身的调节性能等待除氧器
水位达到稳定值。
2.在控制系统投入自动的运行工况下,除氧器水位达到稳定后,改变水位设定
值,在趋势管理界面观察并记录水位变化的数值及其过渡曲线。
3.利用试凑法或经验法调整PID控制器参数,再重复上述步骤,观察并记录此
时系统的调节响应曲线是否满足要求。
4.3 原PID参数效果
原PID参数:
内回路:比例带:δ=1;积分时间:T=0;微分增益:Td=0;
外回路:比例带:δ=1;积分时间:T=100;微分增益:Td=0;
将控制投入自动后不改变设定值,除氧器水位达到稳定后受扰动响应曲线如下:
图4-1 原PID控制效果
分析:
①加入阶跃扰动后,系统能达到稳定,但有静差;
②水位存在一定的振荡;
③阀门动作频繁。
4.4 参数整定
因为理论的整定方法过于繁琐和时间限制,我们采用试凑法对PID参数进行整定。
而对于水位振荡问题,我们通过设置控制器的PIDDB=|PV-SP|死区后,控制效果也得到了很好的改善。
经过多次试凑实验,我们终于得到了较为满意的控制器参数:
内回路:比例带:δ=1.5;积分时间:T=0;微分增益:Td=0;
外回路:比例带:δ=0.7;积分时间:T=50;微分增益:Td=0;
在该参数下,给设定值一个50mm的阶跃,系统的控制效果如下:
图4-2 新PID控制效果
显然,新的PID参数的控制效果明显优于原PID,参数优化较为成功。
5 总结
通过本次试验,我们对除氧器的工作原理和控制原理有了更加深入的理解,对除氧器的定压滑压运行有了新的认识。
1.进行对象特性试验,根据对象特性建立了对象的数学模型,根据此模型更有
利于对控制参数进行优化;
2.在整定的串级三冲量回路中更加体会到了串级控制在快速克服二次扰动的
作用;
3.值得注意的是在载入状态后,需将与除氧器有关的阀门都切换成手动状态,
以消除其对除氧器水位的影响;
4.使用死区可以有效克服阀门频繁动作这一现象。