支导线计算
导线测量、三角高程、支导线计算说明

工地通路测导线测量、三角高程、支导线计算操作模式分为两种:1、现场联机全站仪现场测量、记录、平差;2、对已经有整理好的内业资料情况,提供数据导入功能,导入测量记录完成平差计算。
一、现场联机全站仪测量、记录、平差操作流程:1、点击主界面导线平差,进入导线平差界面,点击底部按钮创建导线2、输入导线的起终点闭合数据。
起点后视点位起点测站的后视点,终点前视为终点测站的前视点。
3、添加测站,写入测站名称、后视名称、前视名称。
4、点击测站条目弹出测回列表对话框,点击添加测回按钮进入测量界面。
5、输入仪器高、前后视棱镜高。
6、连接全站仪后点击测量完成正镜后视、正镜前视、倒镜前视、倒镜后视测量,软件获取全站仪数据并记录(或者手工输入数据),点击确定按钮完成本测回测量。
7、逐个完成测站和对应的测回测量。
8、在导线测量界面点击右上角三个点导出测量记录和导线平差计算表。
二、导入已有的导线观测数据:1、导入工地通路测导线观测文件点击导线平差界面右上角三个点,点击导入工地通观测文件,弹出导入对话框,在手机存储目录中找到数据文件,点击完成导入。
2、导入附合导线进行平差计算并完成成果表点击导线平差界面右上角三个点,点击附合导线平差计算按钮,弹出导入对话框,对话框中提示要导入的文件格式的内容,本文件在Excel编辑上按照要求编辑后,选择单元格右键复制,黏贴到一个TXT文件中,将这个TXT文件发送到手机上,在手机存储目录中找到数据文件,点击完成导入,软件同时完成附合导线简易平差计算,并生成计算表。
3、导入三角高程数据计算并完成成果表点击导线平差界面右上角三个点,点击三角高程计算按钮,弹出导入对话框,对话框中提示要导入的文件格式的内容,本文件在Excel编辑上按照要求编辑后,选择单元格右键复制,黏贴到一个TXT文件中,将这个TXT文件发送到手机上,在手机存储目录中找到数据文件,点击完成导入,软件同时完成三角高程平差计算,并生成计算表。
支导线测量与计算学习

Y2 Y1 y12 702.999 161.439 864.438m
支导线没有多余观测值,因此没有角度检核条件,不产生角度闭合 差,因此观测值的差错不易发觉,计算时必须再次检核。
导线边长测量
导线边长一般用电磁波测距仪或全 站仪观测,同时观测垂直角将斜距 化为平距。
平距=斜距*sin垂直角
导线转折角测量
导线的转折角是在导线点上由相邻 两导线边构成的水平角。(导线的转 折角分为左角和右角,在导线前进 方向左侧的水平角称为左角,在右 侧的称右角)。)
三、导线测量内业计算
目的:计算各导线点的坐标。 要求:合理分配测量误差,并评定
2 2 D2
X= D cos Y= D sin
1
D1 1
AB
B
(XB,YB)
A
xB1 D1 cos B1 297.26 cos 770025 66.834m
y B1 D1 sin B1 297.26 sin 770025 289.649m
x12 D2 cos 12 187.82 cos 591555 95.988m y12 D2 sin 12 187.82 sin 591555 161.439m
导线测量的精度。
导线测量内业三种基本运算
1.推算各边方位角:
前 后 左 180
2.计算各边坐标增量: X=D cos Y=D sin
3.推算各点坐标 X前= X后+X Y前= Y后+Y
支导线的计算步骤(一)
根据已知点坐标反 算起始边的方位角 例如已知:
1 D1
2 D2
2
XA = 664.20 m YA = 213.30 m XB = 864.22 m YB = 413.35 m
支导线测量计算方法

支导线测量计算方法
支导线测量的计算方法有以下几种常用的方法:
1. 三边测量法:将支导线划分成三条互相垂直的边,使用直尺或测距仪测量每条边的长度,再利用勾股定理计算出支导线的长度。
2. 外角测量法:设置一个基准点A,在该点上测量出另外两个点B和C的方位角,并利用外角定理计算出支导线的长度。
3. 基线法:在支导线的两端分别设置一个测量基线,利用测距仪或测距仪测量出基线的长度,并通过观测到的方位角计算出支导线的长度。
4. 交会测量法:在支导线的两端设置两个测量点A和B,通过观测到的方位角和已知距离计算出A点到B点的距离,即为支导线的长度。
以上是常见的支导线测量计算方法,在实际应用中可以根据具体情况选择合适的方法进行测量和计算。
附合导线测量的内业计算

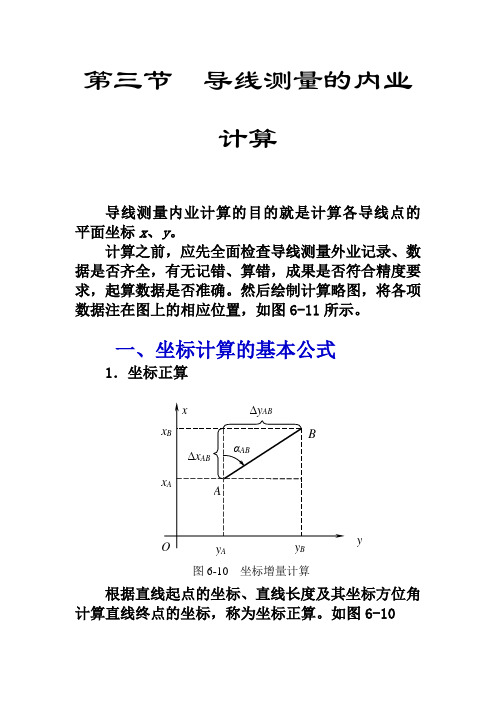
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式 1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:y图6-10坐标增量计算⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
导线测量与计算

2 1934400 1 1782230
6
3 1811300
431712 B AB 1801336 XB=1230.88 A YB= 673.45
图表:附合导线坐标计算表
点 转折角 改正后 方位角 边 长 坐 标 增量(米) 号 (右) D 转折角 Y (米) X 改 正 后 坐标(米) 点 增量(米) 号 X Y X Y
A1 484318 A
1
970300
1051706 2
1
A
2
(2)计算限差:
f 允 60" n
XA=536.27m YA=328.74m
1122224
4
1233006 1014624 4
3
3
(3)若在限差内,则平均分配原则,计算改正 数:
1
970300
1
A
导线全长闭合差:
f f f
2 x 2 y
XA=536.27m YA=328.74m
1122224
1051706 2
2
4
1233006 1014624 4
3
3
导线全长相对闭合差(relative length closing error of traverse): f K 1 / XXX D
v f n
A1 484318 A
1
970300
1051706 2
1
A
2
(4)计算改正后新的 角值:
XA=536.27m YA=328.74m
1122224
4
1233006 1014624 4
3
i i v
3
附和导线、闭合导线的简易平差与支导线的计算
否 无法计算,
所
计算的类 型
跳出提示选 择的提醒框
示
是
点击计算
是否
否
保存
是
保存结果TXT
退出
•
程 序 设 计 流 程
图
基础理论
• 计算方位角闭合差fβ,判断Sβ<fβ容
• β=α’CD -αCD
• fβ容=60或40
n:角的个数
• 分配角闭合差(平均分配),计算改正后的角
度
• V=—β/n βi改=βi+V
政
关键技术和难点
• 度分秒与弧度间的互相转换
•
public static class hddfm
•
{
•
const double pi = 3.1415926;
•
//角度转化为弧度
•
public static double angle_r(double alfa)
•
{
度
•
double alfa1, alfa2;
弧 度
•
return (alfa1 / 180d * pi);
的
•
}
•
//弧度转化为角度
相
•
public static double redian_a(double alfa)
互
•
{
•
double alfa1, alfa2;
•
alfa = alfa * 180d / pi;
转 换
•
alfa1 = Math.Floor(alfa) + Math.Floor((alfa - Math.Floor(alfa)) * 60d) / 100d;
导线测量及计算..
右角
观测方法:单导线采用方向观测法观测左角或右角,支导线 观测左右角,导线网采用全圆方向观测法测角。 (二)、测边: 光电测距仪:目前是测距的主要方法,测距仪等级不同对不 同等级的导线测距的技术要求不同。测距仪的等级是按标 称精度划分。 mD=(a+b×D) mD—测距中误差: a-标称精度中的固定误差: b—标称精度中的比例误差系数: D—测距长度:
f
f x2 f y2
1 K S T f
考虑导线误差与边长有关,衡量导线精度用相对误差表示。
图根导线精度要求:
K
1 2000
3、坐标增量闭合差的调整:
调整原则:以相反符号按边长比例分配到各边长的坐标增量 中去。其坐标增量改正数为:
Vxi V yi fx Si S
S
导 线 测 量
要点: 1、导线的布设形式, 各种形式使用条件。 2、导线的外业工作 包括的内容及精度 要求。 3、导线测量计算
导线的布设形式及要求
一、导线的形式: (一)、闭合导线:如图,从一点开始 经过一系列的导线点,最后又回到原来 的起始点形成一多边形。 (二)、附和导线:如图, B βA 1 2 3 βp P B βA A 7 5 6 3 2 Q 4
∆xAB
α
AB
S
∆yAB
x AB xB x A d cos AB y AB y B y A d sin AB
xA o
A yA
yB
y
以上,根据已知点的坐标、已知边长和坐标方位角计算出 该边的坐标增量,并计算出另一点的坐标的方法称为坐 标正算。用普通计算机计算坐标增量的方法: 例:已知坐标方位角α 12=24°36′00“ 已知边长231.30m
支导线的计算

7.3.4 支导线的计算由于支导线是由一个已知点出发,即不同到原出发点,也不附和到另外已知点上,故这种导线无法检验。
计算时,根据已知点坐标,方位角及测得的转角,;利用坐标在正算公式得支点的坐标。
如图7-11所示,起算数据M(P0)~A(P1)的方位角α01,A(P1)的坐标(x1,y1)。
观测数据为各转角βi,导线边长Di(i+1)(i=1,2,…,n-1),n为导线点的最大编号,对于支导线,一般n≤3.其计算步骤如下:(1)推算坐标方位角利用起算坐标方位角α01和观测转折角βi计算各边的坐标方位角,即αi(i+1)= α(i-1)±βi±180°(i=1,2,…,n-1) (7-19) Βi前的符合:以i-1→i→i+1为前进方向,当βi为左角时取“+”,当βi为右角时取“-”,所谓“左加右减”;180°前的符号:等式右边前两项之和小于180°时取“+”,反之取“-”。
(2)计算坐标增量利用上步计算的坐标方位角和观测得到的各边长Di(i+1),计算相邻导线的坐标增量为△xi(i+1)=Di(i+1)cosαi(i+1)△yi(i+1)=Di(i+1)sinαi(i+1)i=1,2,…,n-1(3)推算坐标利用起算坐标(xi, yi)和坐标增量计算结果,依次推算各导线点的坐标为Xi+1= xi+△xi(i+1)Yi+1=yi+△yi(i+1)7.3.5控制点的加密当已知控制点的数量不能满足测图或施工的要求时,需要对控制点进行加密。
常用的加密方法是交会法,交会法分为前方交会法,后方交会法和边长交会法。
1.前方交会法如图7-12—(a)所示,由两个(或两个)已知点A.B来确定未知点P的坐标的方法称为前方交会法,即用经纬仪在已知点A.B上分别向新点P观测.水平角α和β,从而计算P点的坐标。
计算步骤如下:。
建筑施工测量课件子单元5-3 导线内业计算

αA1 =α3A +180°+βA改 = 245°30′00″+180°+ 85°18′12″ = 150°48′12″
计算中,若推算的 方位角>360°则减去 360”,为检核计算是 否正确,最后应推回 到起始边,该边坐标 方位角的推算值应等 于已知值。各边的方 位角记在表中的第5栏 。
x1 = xA +ΔxA1′= 5609.26-109.86 = 5499.40m y1 = yA +ΔyA1′= 7130.38 +61.34 = 7191.72m
根据同法依次求出2、3点的坐标,最后推算回到A点的坐标 。x、y坐标分别记入最后两栏。
单元5 控制测量
子单元3 导线内业计算
单元5 控制测量
4.坐标增量计算
根据各边坐标方位角和实
测导线边长,计算相应边的
坐标增量。例如表中,闭合
导线第一条边A1的坐标增量
为:
cos
×
ΔxA1=DA1×cosαA1
sin
=125.82×cos150°48′12″ =-109.83m
cos sin
×
ΔyA1=DA1×sinαA1
角度闭合差 fβ=αMA+ ∑β+N×180°-αBN
单元5 控制测量
子单元3 导线内业计算
1.附合导线角度闭合差计算(2)
表中,按上式计算的角度闭合差为: fβ=149°40 ′00″+ 579°13′36″- 4×180°-8°52′55″
=41″
支导线计算例题及解析题
支导线计算例题及解析题
支导线计算是电力系统中的重要内容,用于确定导线所能承受的电流和导线所需的截面积。
下面我们将通过一个例题来介绍支导线计算的方法和步骤,并进行详细的解析。
例题:
一条铜导线的电阻率为0.01724 Ω·mm/m,长度为200 m,电流为100 A。
求导线的电压降和功率损耗。
解析:
步骤1:先计算导线的电阻
电阻 R = 电阻率×长度 / 截面积
步骤2:计算导线的截面积
导线的截面积 A = 电流 / (电阻率×长度)
步骤3:计算电压降
电压降 V = 电流×导线的电阻
步骤4:计算功率损耗
功率损耗 P = 电流×导线的电阻
根据上述步骤,我们来计算导线的电压降和功率损耗。
步骤1:计算导线的电阻
R = 0.01724 Ω·mm/m × 200 m / A
步骤2:计算导线的截面积
A = 100 A / (0.01724 Ω·mm/m × 200 m)
步骤3:计算电压降
V = 100 A × R
步骤4:计算功率损耗
P = 100 A × R
根据具体数据计算得出导线的电压降和功率损耗。
通过这个例题,我们可以看到,支导线计算需要考虑导线的电阻率、长度、截面积和电流等因素。
根据不同的实际情况,可以采用不同的公式和方法进行计算。
支导线的合理计算可以保证电力系统的正常运行和安全性,因此在实际工程中需要认真对待。
(整理)导线测量平差教程—计算方案设置

计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
导线测量的内业计算
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10y图6-10坐标增量计算所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得6.792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
附合导线测量的内业计算

附合导线测量的内业计算第三节导线测量的内业计算导线测量内业计算的⽬的就是计算各导线点的平⾯坐标x 、y 。
计算之前,应先全⾯检查导线测量外业记录、数据是否齐全,有⽆记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所⽰。
⼀、坐标计算的基本公式 1.坐标正算根据直线起点的坐标、直线长度及其坐标⽅位⾓计算直线终点的坐标,称为坐标正算。
如图6-10所⽰,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标⽅位⾓分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,⽤Δx AB 、Δy AB 表⽰。
由图6-10可看出坐标增量的计算公式为:=-=?=-=?AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α⾓所在象限⽽有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量y图6-10坐标增量计算正、负号的规律如表6-5所⽰。
+=?+=+=?+=AB AB A AB A BAB AB A AB A B D y y y y D x x x x ααsin cos (6-2)例6-1 已知AB 边的边长及坐标⽅位⾓为456380m 62.135'''?==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m68.457456380cos m 62.135m 56.435cos ='''??+=+=='''??+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标⽅位⾓,称为坐标反算。
第九章__平面控制测量
三、导线测量的近似平差计算
支导线的计算
其计算步骤如下: 1.由A、M两点的坐标,使用坐标反算公式计
算出坐标方位角αAM。 2.由αAM起始,并根据观测角β1、β2…推算出
各边的坐标方位角。 3.由各边的坐标方位角及边长,按正算公式
控制测量的任务
在测绘各种大比例尺地形图时,要进 行必要的图根控制测量;在工程建设施工 阶段,要进行一定精度的施工控制测量; 在工程竣工后的营运阶段,为进行各种变 形观测而作的专用控制测量。由此可见, 控制测量是进行其他各项测量工作的基础, 它具有传递点位坐标并高精度控制全局的 作用,具有限制测量误差的传播和积累的 作用。
控制测量作业内容
技术设计、实地选点、标石埋设、观 测和平差计算等主要步骤。在常规的高等 级平面控制测量中,当某些方向受地形条 件限制不能使相邻控制点直接通视时,就 需要在控制点上建造觇标。采用GPS定 位技术建立平面控制网,由于不要求相邻 点之间通视,因此不需要建造觇标。
布设控制网的要求
控制网中控制点坐标是由起算数据和观测 数据经平差计算得到的。控制网中只有必要的 一套起始数据,例如三角网中已知一个点的坐 标、一条边长和一边的坐标方位角,这种控制 网称为独立网。如果控制网中已知数据多于必 要的起算数据,则这种控制网称为非独立网。 控制网中的观测数据按控制网的种类不同而不 同,有水平角或水平方向、边长、高差以及三 角高程测量的竖直角或天顶距,外业观测工作 完成后,应对观测成果进行整理和检核,保证 观测成果满足限差要求,然后进行平差计算。 对于高等级控制网需要进行严密平差计算,而 低级的控制网可以采用近似平差计算。
控制测量-数字测图原理与方法

表 6-2 导线 等级 长度 (km) 三等 四等 一级 二级 三级 15 10 3.6 2.4 1.5 平均 边长 (km) 3 1.6 0.3 0.2 0.12 测角
城市导线测量的主要技术指标 测距 中误差 (mm) ±18 ±18 ±15 ±15 ±15 DJ1 8 4 - - - DJ2 12 6 2 1 1 DJ6 - - 4 3 2 测回数 方位角 闭合差 (˝) ±3 ±5 ±10 ±16 ±24 导线全长相对 闭合差 ≤1/60 000 ≤1/40 000 ≤1/14 000 ≤1/10 000 ≤1/6 000
4 L 12 L 20 L 40 L
注:表中 R 为测段长度,单位为 km;L 为附合路线或环线的长度,单位为 km。
三、控制测量的一般作业步骤 控制测量作业包括技术设计、实地选点、标石埋设、观测和平差计算等主要步骤。在常 规的高等级平面控制测量中,当某些方向受到地形条件限制不能使相邻控制点间直接通视 时,需要在控制点上建造测标。采用 GPS 定位技术建立平面控制网,由于不要求相邻控制 点间通视,因此不需要建立测标。 控制测量的技术设计主要包括精度指标的确定和控制网的网形设计。在实际工作中, 控
表 6-1 等 级 二等 三等 四等 一级小三角 二级小三角 平均边长 (km) 9 5 2 1 0.5 城市三角测量的主要技术指标 测角中误差 (˝) ±1.0 ±1.8 ±2.5 ±5.0 ±10 .0 最弱边边长相 对中误差 ≤1/120 000 ≤1/80 000 ≤1/45 000 ≤1/20 000 ≤1/10 000 DJ1 12 6 4 - - 测回数 DJ2 - 9 6 2 1 DJ6 - - - 6 2 三角形最大闭 合差(˝) ±3.5 ±7.0 ±9.0 ±15.0 ±30.0
导线测量及计算
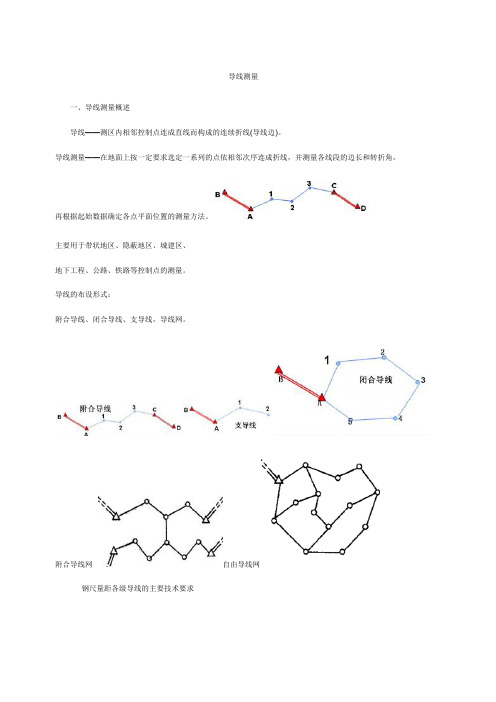
导线测量一、导线测量概述导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。
导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法。
主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制点的测量。
导线的布设形式:附合导线、闭合导线、支导线,导线网。
附合导线网自由导线网钢尺量距各级导线的主要技术要求注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求二、导线测量的外业工作1.踏勘选点及建立标志2.导线边长测量光电测距(测距仪、全站仪)、钢尺量距当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。
(α+β+γ)-180o改正内角,再计算FG边的边长:FG=bsinα/sinγ3.导线转折角测量一般采用经纬仪、全站仪用测回法测量,两个以上方向组成的角也可用方向法。
导线转折角有左角和右角之分。
当与高级控制点连测时,需进行连接测量。
三、导线测量的内业计算思路:①由水平角观测值β,计算方位角α;②由方位角α及边长D, 计算坐标增量ΔX 、ΔY;③由坐标增量ΔX 、ΔY,计算X、Y。
(计算前认真检查外业记录,满足规范限差要求后,才能进行内业计算)坐标正算(由α、D,求X、Y)已知A(x A,y A),D AB,αAB,求B点坐标x B,y B。
坐标增量:待求点的坐标:(一)闭合导线计算图6-10是实测图根闭合导线示意图,图中各项数据是从外业观测手簿中获得的。
已知数据:12边的坐标方位角:12 =125°30′00″;1点的坐标:x1=500.00,y1=500.00现结合本例说明闭合导线计算步骤如下:准备工作:填表,如表6-5 中填入已知数据和观测数据.1、角度闭合差的计算与调整:n边形闭合导线内角和理论值:(1) 角度闭合差的计算:例:fβ=Σβ测-(n-2)×180o=359o59'10"-360o= -50";闭合导线坐标计算表(6-5)(2) 角度容许闭合差的计算(公式可查规范)(图根导线)若:f测≤ fβ容,则:角度测量符合要求,否则角度测量不合格,则1)对计算进行全面检查,若计算没有问题,2)对角度进行重测本例:fβ= -50″根据表6-5可知,=±120″则fβ<fβ容,角度测量符合要求3) 角度闭合差fβ的调整:假定调整前提是:假定所有角的观测误差是相等的,角度改正数:(n—测角个数)角度改正数计算,按角度闭合差反号平均分配,余数分给短边构成的角。
导线测量及计算

⊿y4n
3
B X终、y终 (n)
⊿x12
⊿xA1
X起、y起 0
⊿yAB
y
理论值:
x y
理 理
x终 x起 y终 y起
则闭合差为:
f x x测 x理
f y y测 y理
0 0
α
AB
β
α α
BA
AB
C
β左
AB 1800 左
α
B
BC
α
AB
A 若计算出的方位角超过360 0则应减去360 0。 若计算出的方位角小于0 0则应加上360 0 。
α
BA
C
(三)坐标增量的计算和坐标增量调整 1、坐标增量的计算: 坐标增量—相邻导线点坐标之差。 xB 坐标增量的计算方法: x B
导线测量的内业计算
要点: 1、角度闭合差的计算及闭合差的分配原则; 2、坐标增量闭合差的计算及闭合差的分配原则; 3、导线点的坐标计算; 4、利用表格计算方法;
一、闭合导线的计算 (一)、角度闭合差的计算和角度的调整 理论值: ∑β 理=(n-2)180⁰=540⁰00′00″ 实测内角和: ∑β 测=540⁰00′52″ 角度闭合差: fβ =∑β 测—∑β 理=+52″ 图根导线容许角度闭合差:
(四)、结点导线:从三个以上高级控制点开始的导线,在一个 或几个共同点汇合。如图,E、F点称为结点。 (五)、导线网:若干个闭合导线连接在一起,形成导线网。 二、各导线形式的使用条件: (一)闭合导线:适用于宽阔地区,无高级控制点的地区。 (二)附和导线:适用于狭长地带。例铁路、公路。 (三)支导线:无校核条件,适用 B A 于导线数目不足时的测图。在钢 尺量距时由于量距精度低一般不 D 超过两个点。 C (四)结点导线:增加校核条 A A D 件可以提高导线点的精度。 F D E (五)导线网:测区范围较大时, C B B' 首级控制可布成导线网。 C
6.5.1导线测量内业计算支导线

步骤3
步骤4
支导线坐标计算表
点 观测角(左角) 坐标方位角 边长/ m
号
°´"
°´“
坐标增量
Δx/m
Δy/m
A
B
157 21 56
1
125 31 25
2
161 18 51 138 40 47
84 12 12
126.36 94.65
坐标值
点
x/m
y/m 号
A
1082.02 1583.14 B 1 2
前
后
180
左 右
支导线的计算步骤
步骤1
填入数据,起 算数据用双线 标明。
步骤2
根据观测的转折 角推算各边坐标 方位角。
步骤3
根据各边的方位 角计算各边的坐 标增量。
步骤4
支导线坐标计算表
点 观测角(左角) 坐标方位角 边长/ m
号
°´"
°´“
坐标增量
Δx/m
Δy/m
A
B
157 21 56
1
125 31 25
y 126.36 sin138o4047 83.43
支导线据用双线 标明。
步骤2
根据观测的转折 角推算各边坐标 方位角。
步骤3
根据各边的方位 角计算各边的坐 标增量。
步骤4
根据各边的坐标 增量推算各点的 坐标。
支导线坐标计算表
点 观测角(左角) 坐标方位角 边长/ m
如何计算出 支导线中各 控制点坐标 呢?
外业数据
A AB 161o1851
xB 1082.02m 157o2156 yB 1583.14m
B 125o3125 2