滑模变结构控制消抖及终端滑模面设计研究(郭为安)
滑模变结构控制研究综述

滑模变结构控制研究综述摘要:本文主要介绍滑模变结构控制的研究情况。
先介绍了滑模变结构控制的发展历史及基本定义,并对国内外滑模变结构的研究现状进行了评述;然后论述了滑模变结构控制的主要研究方向,重点介绍了离散时间系统变结构控制的研究;最后对滑模控制的发展作了展望。
关键词:滑模;变结构控制;非线性控制;离散系统A survey of research on sliding mode variable structure controlAbstract: A survey on the current research of sliding mode variable structure control is introduced, including the history of the development and basic definitions; and then discussed the main research directions of the sliding mode variable structure control, which emphasizes on the discrete-time systems. Further more, research tendencies in this field are discussed.key words: sliding mode; variable structure control; nonlinear control;discrete-time systems1引言在非线性控制领域,鲁棒控制的典型代表是滑模变结构控制。
滑模变结构控制是目前非线性控制系统较普遍、较系统的一种综合方法。
它的突出优点是滑动模态对于参数摄动和外界扰动等不确定因素具有不敏感性,并且滑动模态的动态品质是可以预先设计的。
这种优异的性能对控制系统是十分重要的,目前已被广泛应用于机器人、伺服系统、空间飞行器、化工过程等领域[1~3]。
机器人的终端滑模变结构控制研究
机器人的终端滑模变结构控制研究
薛小峰;高阳;田志祥
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)017
【摘要】针对机器人这类非线性强耦合系统,基于滑模变结构控制理论,提出了一种终端滑模变结构控制方法.该方法将系统的状态方程化为为关节子系统,利用终端滑模方法构造每个子系统的滑模面,在此基础上运用李雅普诺夫函数和含有饱和函数的指数趋近律设计了关节子系统的控制律.利用所提出的方法对平面二自由度机器人的控制系统进行了设计并进行了仿真,仿真结果表明了该控制方法不仅有效地实现了机器人关节控制,而且该控制方法还能降低因采用滑模控制而产生的抖振,并使得系统快速收敛到平衡稳定状态.
【总页数】3页(P152-154)
【作者】薛小峰;高阳;田志祥
【作者单位】225001,江苏扬州,中国船舶重工集团723研究所;225001,江苏扬州,中国船舶重工集团723研究所;210016,江苏南京,南京航空航天大学机电学院【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于反演的机器人滑模变结构控制研究 [J], 薛小峰;高阳;田志祥
2.网络遥操作机器人系统模糊变结构控制研究 [J], 周军;谢成祥
3.双轮自平衡机器人的滑模变结构控制研究 [J], 马传翔;杨名利
4.基于终端滑模控制的两轮移动机器人自平衡实现方法研究 [J], 王利清
5.并联有源滤波器终端滑模变结构控制策略研究 [J], 高圣伟; 亚志政; 许煜
因版权原因,仅展示原文概要,查看原文内容请购买。
滑模变结构控制系统的抖振抑制方法研究
滑模变结构控制系统的抖振抑制方法研究滑模变结构控制系统在实际应用中,由于线性化误差的存在,容易出
现抖振现象。
为了解决这一问题,研究者提出了以下几种抖振抑制方法:
1.基于积分去抖振思想的方法。
在滑模变结构控制系统中,可以加入一个积分项,用来消除控制器的
稳态误差。
当外部扰动作用时,积分项会积累,从而引起抖振现象。
因此,可以采用基于积分去抖振的思想,对积分项进行修正,避免抖振的出现。
2.基于滤波器设计的方法。
在滑模变结构控制系统中,可以引入一个低通滤波器,对输入信号进
行滤波,减小高频成分。
这样可以避免噪声和干扰的影响,从而减少抖振
现象。
3.基于信号采样周期的方法。
在控制系统设计时,可以根据系统采样周期选择合适的控制参数。
对
于快速响应的系统,需要较短的采样周期,这样可以减少抖振现象的出现。
而对于慢速响应的系统,则需要较长的采样周期。
4.基于模糊控制的方法。
模糊控制是一种具有适应性和鲁棒性的控制方法,可以根据实际情况
动态调整控制参数。
在滑模变结构控制系统中,可以采用模糊控制来调节
控制器的参数,从而减少抖振现象的出现。
总之,抖振抑制是滑模变结构控制系统中的一项重要问题,需要根据
实际情况选择合适的方法进行解决。
滑模变结构控制及应用
滑模变结构控制及应用滑模变结构控制(Sliding Mode Control,SMC)是一种具有强鲁棒性和抗扰动能力的非线性控制方法。
它是20世纪80年代发展起来的一种控制方法,它通过在滑模面上引入一个不连续函数来实现对系统状态的高频率的转换控制,从而将控制系统的性能提高到一个新的水平。
滑模变结构控制在自动控制领域中得到了广泛的研究与应用,下面我将就其基本原理、设计方法以及应用领域进行详细介绍。
滑模变结构控制的基本原理:滑模变结构控制的基本原理是引入一个滑模面,通过使系统状态在滑模面上进行快速的滑动,从而达到控制系统的稳定性和鲁棒性。
在滑模面上,系统状态由于受到控制输入和系统的非线性特性的影响而发生快速切换,从而使系统状态的滑动速度不断变化,最终达到滑动面的稳定状态。
滑模控制器利用滑模面上的控制输入来驱动系统状态沿着滑模面滑动,以实现状态的稳定和跟踪。
滑模变结构控制的设计方法:滑模变结构控制一般包括滑模面的设计和滑模控制器的设计两个步骤。
滑模面的设计要求其具有可实现性、稳定性和鲁棒性等特性,常用的滑模面设计方法包括等效控制、非线性控制、线性控制等。
滑模控制器的设计包括产生控制输入和产生滑模面两个部分,常用的滑模控制器设计方法包括理想滑模控制器、改进滑模控制器、自适应滑模控制器等。
滑模变结构控制的应用领域:滑模变结构控制在各个领域中都有广泛的应用,下面我将就几个典型的应用领域进行介绍。
1. 机械控制系统:滑模变结构控制在机械控制系统中应用广泛,例如机械臂控制、机械手控制等。
滑模变结构控制可以提供强鲁棒性和抗扰动能力,可以保证机械系统在复杂环境下的精确运动和稳定控制。
2. 电力系统:滑模变结构控制在电力系统中的应用主要包括电力系统稳定控制、电力系统调度控制等。
滑模变结构控制可以有效地处理电力系统中的不确定性和扰动,提高电力系统的稳态和动态性能。
3. 交通运输系统:滑模变结构控制在交通运输系统中的应用包括车辆控制、交通信号控制等。
滑模变结构控制中抖振的特性研究与抑制
滑模变结构控制中抖振的特性研究与抑制滑模变结构控制中抖振的特性研究与抑制摘要:滑模变结构控制是一种有效的非线性控制策略,已广泛应用于工业自动化系统中。
然而,滑模控制器在实际应用过程中常常会出现抖振问题,这会影响控制系统的性能和稳定性。
在本文中,我们对滑模变结构控制中抖振的特性进行了研究,并提出了一些有效的抑制方法,以改善系统的控制性能。
1. 引言滑模变结构控制是一种通过构造滑模面使系统状态快速地滑动到该面上,并通过强制使系统状态在滑模面上滞留,从而实现对系统的控制。
相对于传统的线性控制方法,滑模变结构控制具有优良的鲁棒性和非常强的扰动抑制能力。
然而,在实际应用中,滑模控制器常常会出现抖振的现象。
2. 抖振的产生原因抖振是指在滑模控制过程中系统状态出现明显的摆动或振荡现象。
抖振的产生主要是由于以下几个因素:(1)控制策略的非理想: 控制器设计不合理,参数选择不当,容易使系统产生振荡;(2)系统的非线性和不确定性:实际系统往往存在着非线性和不确定性的因素,这对系统的控制带来了一定的干扰;(3)滑模面设计不当:滑模面的选取对于控制系统的性能有着重要的影响,滑模面设计不当会导致系统抖振。
3. 抖振的特性研究为了深入了解滑模控制中抖振的特性,我们对滑模控制的数学模型进行了分析,并通过数学推导和仿真实验进行了验证。
研究发现:(1)抖振幅度与滑模面的斜率有关:当滑模面的斜率较大时,抖振幅度较小,反之则抖振幅度较大;(2)抖振频率与系统的自然频率有关:抖振频率与系统的自然频率接近时,抖振现象最为明显;(3)抖振与系统的非线性有关:非线性系统更容易出现抖振现象。
4. 抖振的抑制方法为了有效抑制滑模变结构控制中的抖振现象,我们提出了以下几种抑制方法:(1)参数调节法:通过合理调节滑模面的斜率和截距等参数,可以减小抖振幅度;(2)自适应算法:利用自适应算法来在线调整控制参数,以适应不同工况下的系统特性;(3)鲁棒性设计:采用鲁棒控制方法,使控制系统对于非线性和不确定性具有更好的适应性,减小抖振现象;(4)滤波器设计:通过引入滤波器来抑制系统中的高频振荡,达到减小抖振幅度的目的。
基于滑模变结构控制的空间绳系组合体二维消摆控制方法
基于滑模变结构控制的空间绳系组合体二维
消摆控制方法
本文提出了一种基于滑模变结构控制的空间绳系组合体二维消摆控制方法。
首先,建立了空间绳系组合体的动力学模型,并分析了系统的特性。
然后,考虑到系统中存在着干扰和不确定因素,采用了滑模变结构控制方法进行控制器的设计。
控制器能够使系统保持稳定,并实现对绳系组合体的二维消摆控制。
具体地,本文首先将系统状态定义为误差向量和误差变化率向量。
然后,设计了一种双层滑模变结构控制器,其中外层控制器用于保证系统的稳定性,内层控制器用于实现对绳系组合体的消摆控制。
控制器具有快速响应、强鲁棒性、抗干扰能力强等优点。
最后,通过数值仿真实验验证了所提出的控制方法的有效性和性能。
仿真结果表明,所提出的方法能够使绳系组合体在受到干扰的情况下保持稳定,并实现了二维消摆控制。
综上所述,本文提出了一种基于滑模变结构控制的空间绳系组合体二维消摆控制方法。
该方法具有较强的控制性能和鲁棒性,可应用于空间绳系组合体的控制和稳定。
滑模变结构控制方法
20世纪50年代: 前苏联学者Utkin和Emelyanov提出了变结构控制的概念,研究对象:二阶线性系统。 20世纪60年代: 研究对象:高阶线性单输入单输出系统。主要讨论高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情况。 1977年: Utkin发表一篇有关变结构控制方面的综述论文,系统提出变结构控制VSC和滑模控制SMC的方法。同时,在1992年详细讨论了滑模技术。
正常运动段:位于切换面之外, 如图的 段所示。
滑模变结构控制的整个控制过程由两部分组成:
滑模变结构控制的品质取决于这两段运动的品质。由于尚不能一次性地改善整个运动过程品质,因而要求选择控制律使正常运动段的品质得到提高。 选择切换函数使滑动模态运动段的品质改善。两段运动各自具有自己的高品质。 选择控制律 :使正常运动段的品质得到提高。 选择切换函数 : 使滑动模态运动段的品质改善。
滑模变结构控制发展历史
此后 各国学者开始研究多维滑模变结构控制系统,由规范空间扩展到了更一般的状态空间中。 我国学者贡献: 高为炳院士等首先提出趋近律的概念,首次提出了自由递阶的概念。 海洋运载器方面的应用: Yoerger and Slotine (1985), Slotine and Li(1991), Healey and Lienard (1993) and Mc Gookin et al. (2000a, 2000b)
定义1:系统结构 系统的一种结构为系统的一种模型,即由某一组数学方程描述的模型。系统有几种不同的结构,就是说它有几种(组)不同数学表达式表达的模型。 定义2 :滑动模态 人为设定一经过平衡点的相轨迹,通过适当设计,系统状态点沿着此相轨迹渐近稳定到平衡点,或形象地称为滑向平衡点的一种运动,滑动模态的”滑动“二字即来源于此。
滑模变结构控制基本理论课件

04
CATALOGUE
滑模变结构控制的实现与仿真
滑模控制器的MATLAB/Simulink实现
控制器设计
根据滑模变结构控制原理,利用 MATLAB/Simulink进行控制器设计,
包括滑模面函数、控制律等。
控制器参数调整
根据仿真结果,调整控制器参数,优 化控制性能。
模型建立
根据被控对象模型,在Simulink中建 立相应的仿真模型。
基于模拟退火算法的滑模控制器优化
模拟退火算法是一种基于物理退火原 理的优化算法,通过模拟金属退火过 程,寻找最优解。
模拟退火算法具有全局搜索能力强、 能够处理离散和连续问题等优点,适 用于滑模变结构控制的优化问题。
在滑模控制器优化中,模拟退火算法 可以用于优化滑模面的设计、滑模控 制器的参数等,提高滑模控制器的性 能和鲁棒性。
滑模控制器稳定性的分析方法
滑模控制器稳定性的分析方法包括基于 Lyapunov函数的方法、基于Razumikhin函数的 方法等。
滑模控制器稳定性的判定准则
滑模控制器稳定性的判定准则包括Lyapunov稳 定性定理、Razumikhin稳定性定理等。
03
CATALOGUE
滑模变结构控制的优化方法
基于遗传算法的滑模控制器优化
1
遗传算法是一种基于生物进化原理的优化算法, 通过模拟基因突变、交叉和选择等过程,寻找最 优解。
2
在滑模控制器优化中,遗传算法可以用于优化滑 模面的设计、滑模控制器的参数等,提高滑模控 制器的性能和鲁棒性。
3
遗传算法具有全局搜索能力强、能够处理多变量 和非线性问题等优点,适用于滑模变结构控制的 优化问题。
案例分析
通过具体案例分析,深入了解滑模控制器在 实际应用中的优势和不足。
非线性控制9---变结构控制--新版PPT课件

62
变结构控制的综合
2021
63
2021
64
2021
65
2021
66
2021
67
2021
68
2021
69
2021
70
2021
71
2021
72
2021
73
2021
74
2021
75
2021
76
2021
77
2021
78
2021
79
2021
80
2021
81
2021
82
2021
83
2021
84
2021
85
《滑模变结构控制MATLAB仿真》,刘金202琨1 ,清华大学出版社,2005。
86
2021
87
2021
88
2021
89
2021
90
2021
91
2021
92
2021
93
2021
94
2021
95
2021
96
2021
97
2021
98
2021
1) 1957-1962年,前苏联学者Utkin和Emelyanov研究了二阶 系统的分区线性化相平面方法,继电器的滑模运动等,这蕴含 着滑模变结构控制的概念;
2) 1962-1970年,此阶段开始针对高阶线性系统进行研究,但仍
限于单输入输出系统;
2021
2
引言
3)1970-1980年,此阶段得出滑模变结构控制对摄动及干扰具 有不变性,并给出了充分必要条件;
选择切换函数 s( x) : 使滑动模态运动段的品质改善。
滑模变结构控制系统的抖振抑制方法研究

滑模变结构控制系统的抖振抑制方法研究滑模变结构控制(Sliding Mode Control, SMC)是一种非线性控制技术,其特点是对系统的非线性特性不敏感,并且具有鲁棒性和抗干扰能力强等优点。
在实际应用中,滑模控制系统存在抖振现象,即系统的输出会产生快速震荡,影响控制系统的性能和稳定性。
因此,对于滑模控制系统的抖振抑制方法进行研究具有重要意义。
滑模控制系统的抖振抑制方法可以从以下几个方面进行研究:1.控制参数的选择:抖振抑制的一种方法是通过合理选择滑模控制器的参数来实现。
调节滑模控制器的参数可以改变系统的动态响应特性,从而实现抖振的抑制。
通常可以通过试探法或者经验法来选择合适的参数。
2.引入饱和非线性:饱和非线性是一种广泛应用于滑模控制中的方法。
通过引入饱和非线性可以实现控制系统的分段线性特性,从而减小抖振现象的出现。
饱和非线性可以根据系统的特性进行设计,可以基于系统的频率响应、积分饱和性等因素。
3.自适应滑模控制:自适应滑模控制是一种引入自适应机制的滑模控制方法。
该方法可以根据系统的状态和外部扰动的变化实时调整滑模控制器的参数,从而实现对抖振的抑制。
自适应滑模控制可以通过引入自适应律、自适应辨识方法等实现。
4. 非线性饱和补偿控制:非线性补偿控制是一种通过引入补偿器来抑制抖振的方法。
通过引入补偿器可以根据系统的非线性特性实时调整滑模控制器的参数,从而实现对抖振的抑制。
非线性饱和补偿控制可以通过Lyapunov函数分析等方法进行设计。
5.基于优化算法的方法:优化算法是一种通过优化目标函数来求解最优控制参数的方法。
通过优化算法可以求得一个最优的滑模控制器参数,从而实现抖振的抑制。
常用的优化算法有遗传算法、粒子群算法、模拟退火算法等。
在实际应用中,综合考虑以上方法的优缺点和适用性,选择合适的抖振抑制方法进行研究。
为了提高滑模控制系统的抖振抑制效果,可以采用多种方法进行组合或者结合其他控制方法进行增强,以实现更好的控制性能。
滑模变结构控制在直流直线电机中的应用研究
滑模变结构控制在直流直线电机中的应用研究李丽霞;宛波;田卫华【摘要】针对直流直线电机定位问题,推导了直流直线电机的数学模型,建立了直流直线电机定位控制系统,并将滑模变结构控制应用于直流直线电机的控制中,在此基础上对其进行仿真并加以分析.从MATLAB仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点.【期刊名称】《沈阳工程学院学报(自然科学版)》【年(卷),期】2010(006)001【总页数】3页(P35-37)【关键词】直流直线电机;滑模变结构控制;定位控制【作者】李丽霞;宛波;田卫华【作者单位】沈阳工程学院,自动控制工程系,沈阳,110136;沈阳工程学院,自动控制工程系,沈阳,110136;沈阳工程学院,自动控制工程系,沈阳,110136【正文语种】中文【中图分类】TM359直流直线电动机广泛地应用于航天、工业检测、自动化控制、信息系统、民用及其他各技术领域.在这些领域中,它可用作电子计算机外围设备、自动化仪器仪表、精密直线位移的机械手及机器人中用作增量运动的执行元件.尤其是近些年来在机床进给系统中的应用,使用直流直线电动机的系统比使用其他电机的系统跟踪精度提高了一个数量级.1 直流直线电机的数学模型直流直线电机的原理如图1所示.图1 直流直线电机工作原理通电电枢绕组在永久磁铁产生的磁场自由移动受到电磁力的作用;同时,线圈运动会切割磁力线产生感应电动势,由愣次定律可知其感应电流的方向与线圈中原来的电流方向相反,由上述2方面的关系,不难推导出直线电机回路和机械的动态方程为其中,fe为线圈受到的电磁力;m为线圈质量;x为线圈位移;ua为回路电压;ia为回路电流;Bδ为磁感应强度;Ra为线圈导体电阻;La为线圈导体电感;ea为反电动势;L为线圈;v为线圈速度.上式经过拉氏变换后为其中,a(s)表示电机加速度对应的拉氏变换.实际电机在运行的过程中,会受到外界的作用力,如滑动摩擦力、粘滞摩擦力等.在此,将这些外力用N(s)表示,并且假定大小与速度成正比,且比例系数为B.于是,系统的方框图如图2所示.图2 系统方框图将直流直线电机实际运行的各参数代入上述各式可得整个系统的传递函数为由于1 657.2≫8.8,显然在的主导极点为-8.8,为简化后面的推导,忽略第二项,则此系统变为1个二阶的系统2 滑模变结构控制器设计变结构控制器如图3所示.图3 滑模变结构控制系统其中,R(x)为期望的位置;P为实际测量的位置;U为电压;X1为期望值与实际值的误差;n(t)为外界干扰.考虑电压与位置间的传递函数令X1为位置误差,X1=R-P,P=R-X1,则由式(9)得K(U-n)=R¨-X¨1+A(R﹒-X﹒1)+BR-BX=R¨+AR﹒+BR-X¨1-AX﹒1-BX.令X2=X﹒1,则X﹒2=X¨1=R¨+AR﹒+BR-AX﹒1-BX1-KU+Kn=R¨+AR﹒+BR-BX1-AX2-K(U-n).设定顺滑曲面的切换函数为根据前面的推导S◦S﹒<0.由(12)式可以看出,影响系统稳定性的因素为状态变量X1、X2与S的乘积及控制量U.因此选择控制器如下:其中,φ1和φ2为状态变量的回馈参数;d为正数;H1、H2与sgn(S)定义如下:将式(13)代入式(12)由前面推导出的转换条件S◦S﹒<0,可以判断出如果要S◦S﹒<0则必须有以下的当X2 S>0时,H2=1当X2 S<0时,H2=-1当X1 S>0时,H1=1当X1 S时,H1=-1化简可以根据式(15)至式(19)所推导的逻辑判断法则来设计控制器,图4为根据逻辑判断式所绘出的方块图.图4 滑动模型逻辑判断3 控制系统仿真由式(7),电机的传递函数为以下形式,并用G(s)表示,具体为.以此为基础,考虑输入为阶跃函数时输出的波形情况及轨迹追踪能力.具体分2部分,首先d=30时,讨论输出;其次,d=300时,讨论输出.系统没有干扰,输入为阶跃函数且d=30时,仿真结果见图5.图6为参数d=300时的阶跃响应.4 结论从MATLAB仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点,并且所设控制器中参数d取值不同,响应速度不同.[1] 雷进波,胡旭晓,李家赓.最优控制策略在直流直线电机中的应用研究[J].组合机床与自动化加工技术,2003(9).[2] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2002.[3] 李酞黔.直接驱动直线交流伺服电动机[J].微电机,1998(3).[4] Caricchi F,Giulii Capponi F,Crescimbini F,et al.Sinusoidal brushless drive with low-cost linear Hall effect position sensors[C].Proc IEEE-PESC Conf,2001:799-804.[5] 范海民,夏西平,库才发,等.一种直流永磁圆筒型直线伺服电机系统[J].洛阳工学院学报,2002,22(l):43-46.[6] 丁志刚,蒋黔麟,陶志鹏,等.微特直线电机及其控制[M].杭州:浙江大学出版社,1987.[7] 梁得亮,鲁军勇,丰向阳.永磁直线无刷直流电动机的建模与仿真[J].西安交通大学学报,2004,38(2):186-189.[8] Kuehnlw M R,Peeken H,Troeder Cetal.The Toroidal Drive[J].Mechanical Engineering,1981,103(2):32-39.[9] 陈志华,李圣怡,杨舜洲.直线电机直接驱动的伺服刀架控制器的研究[J].控制理论与应用,2002,19(1):89-94.[10] 江思敏,王先逵,吴丹,等.凸轮数控车削系统关键技术的研究[J].机械工程学报,2003,39(12):135-139.[11] 范大鹏,尹自强,郑子文.直线电机在精密加工中的应用[J].制造技术与机床,1997(5):33-35.[12] Chung SK,Lee J.Robust speed on trollof brushless directdrive Motor using integral variable structure control[J].IEE Pro-Electr PowerApple,1995,142(6):362-366.。
汽车半主动悬架的滑模变结构控制
汽车半主动悬架的滑模变结构控制
郑玲;邓兆祥;李以农
【期刊名称】《振动工程学报》
【年(卷),期】2003(016)004
【摘要】在1/4汽车动力学模型的基础上,运用滑模变结构方法设计了汽车半主动悬架滑模控制器.基本思想是以半主动悬架的近似天棚阻尼系统作为参考模型,把被控系统和参考模型间的广义误差动力学引入渐近稳定的滑动模态中;采用极点配置法确定滑模切换面参数;用等速趋近率改善滑模运动段的动态品质;根据滑模面上的等效控制力,确定半主动悬架的实时控制阻尼力.仿真结果表明:该滑模控制器性能稳定,具有较好的鲁棒性和跟踪性,对模型参数的变化和外界扰动有一定的适应性.仿真证实了滑模控制器设计的有效性.
【总页数】6页(P457-462)
【作者】郑玲;邓兆祥;李以农
【作者单位】重庆大学机械传动国家重点实验室,重庆,400044;重庆大学机械传动国家重点实验室,重庆,400044;重庆大学机械传动国家重点实验室,重庆,400044【正文语种】中文
【中图分类】TH113;O329
【相关文献】
1.某越野汽车磁流变半主动悬架变论域模糊控制 [J], 庞辉;刘凡;王延
2.基于自适应模糊的汽车半主动悬架容错控制 [J], 姚行艳
3.基于模糊比例积分微分算法的汽车半主动悬架振动分析 [J], 刘晓昂;张佳琪;王爽
4.轮毂电机驱动汽车半主动悬架自适应最优控制 [J], 李仲兴;宋鑫炎;刘晨来;薛红涛
5.轮毂电机驱动汽车半主动悬架自适应最优控制 [J], 李仲兴;宋鑫炎;刘晨来;薛红涛
因版权原因,仅展示原文概要,查看原文内容请购买。
控制系统中的滑模控制算法研究与实现方法
控制系统中的滑模控制算法研究与实现方法滑模控制算法是一种在控制系统中应用较为广泛的控制策略,其特点是具有快速、稳定、鲁棒性强等优点。
本文将重点研究与实现滑模控制算法在控制系统中的应用方法。
一、滑模控制算法的基本原理滑模控制算法是基于滑模面的设计原理,通过引入滑模面来使得系统的状态向滑模面聚集。
具体来讲,滑模面是指一个二维空间,可以是物理空间中的平面,也可以是状态空间中的超平面。
滑模面上的动态系统能够实现快速稳定性和鲁棒性。
滑模面的设计需要满足两个条件:首先是滑模面上的动态系统需要呈现出良好的稳定性,即系统的状态能够在滑模面上达到稳定的状态;其次是对系统的输入信号施加某种控制策略,使得系统的状态能够快速地达到滑模面。
基于这些条件,滑模控制算法通过设计合适的控制律来实现控制系统的稳定和鲁棒性。
二、滑模控制算法的研究方法1. 确定系统模型和状态空间方程首先,我们需要根据所要控制的物理系统确定其数学模型和状态空间方程。
系统的模型和状态方程决定了滑模面的设计和控制律的选择。
2. 设计滑模面在滑模控制算法中,滑模面的设计是非常关键的一步。
根据所要控制的系统的特点和需求,可以选择线性滑模面、非线性滑模面或者其它形式的滑模面。
滑模面的设计需要满足系统稳定性和鲁棒性的要求。
3. 确定滑模控制律滑模控制算法的核心是选择合适的滑模控制律。
滑模控制律是一种输出反馈控制律,通过使系统的状态向滑模面聚集来实现控制的稳定性和鲁棒性。
滑模控制律的设计通常包括滑模面上的状态变量、输入变量以及一些控制参数的组合。
根据所要控制的系统的特点和需求,可以根据经验或使用优化方法来确定合适的滑模控制律。
4. 系统仿真与实验验证在研究滑模控制算法时,通常需要进行系统的仿真和实验验证。
通过使用仿真软件或搭建实验平台来验证设计的滑模控制算法的性能。
仿真与实验验证可以帮助我们了解控制系统在不同条件下的行为,并对滑模控制算法进行改进和优化。
三、滑模控制算法的实现方法1. 基于硬件的实现方法滑模控制算法可以通过硬件实现,即使用控制器和传感器等硬件设备来实现滑模控制算法。
车辆稳定性的滑模变结构控制研究
车辆稳定性的滑模变结构控制研究
罗俊;陶健民
【期刊名称】《湖北汽车工业学院学报》
【年(卷),期】2005(019)003
【摘要】运用滑模变结构控制理论,设计了车辆操纵稳定性的控制器.运用Matlab/Simulink软件平台,通过阶跃和蛇行等工况的仿真计算,验证了控制策略的可行性,分析了控制策略的应用范围和效果.
【总页数】5页(P17-21)
【作者】罗俊;陶健民
【作者单位】武汉科技大学,湖北,武汉,430081;湖北汽车工业学院,湖北,十
堰,442002;湖北汽车工业学院,湖北,十堰,442002
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.基于滑模变结构控制法的半挂汽车列车高速行驶稳定性研究 [J], 龙佳庆;韦超毅;
2.基于滑模变结构控制的车辆稳定性研究 [J], 杨康;王振臣;赵莎
3.基于滑模变结构控制的车辆动力学稳定性控制研究 [J], 王其东;章贵华;陈无畏;祝辉
4.基于滑模变结构控制法的半挂汽车列车高速行驶稳定性研究 [J], 龙佳庆;韦超毅
5.基于滑模变结构控制的SUV稳定性研究 [J], 徐小东;赵垚森;朱勇
因版权原因,仅展示原文概要,查看原文内容请购买。
滑模变结构控制方法

控制律的设计
01
控制律的形式
控制律是变结构控制中的关键部 分,它决定了系统状态在滑模面 上的运动方式和轨迹。
02
控制律的求解
03
控制律的调整
控制律的求解可以采用多种方法 ,如解析法、优化算法和智能算 法等。
控制律的调整可以通过调整控制 参数,以改善系统的跟踪性能和 减小超调。
滑模运动的稳定性
1 2 3
滑模变结构控制方法对外部干扰的抑制能力有限,如果干扰较大, 可能会影响系统的性能。
改进方向
减小抖振
通过改进滑模变结构控制方法的设计,减小切换过程中的抖振现象 ,提高系统的稳定性和性能。
增强对系统参数的鲁棒性
通过改进滑模变结构控制方法的设计,提高其对系统参数变化的鲁 棒性,减小参数变化对系统性能的影响。
THANKS
感谢观看
04
CATALOGUE
滑模变结构控制方法的优缺点
优点
响应速度快
滑模变结构控制方法能够在短时间内 快速响应,对于系统的快速变化具有 较好的适应性。
设计简单
滑模变结构控制方法的设计过程相对 简单,易于实现,特别适合于处理不 确定性和非线性问题。
鲁棒性强
滑模变结构控制方法对系统参数的变 化和外部干扰具有较强的鲁棒性,可 以在一定程度上减小参数变化和外部 干扰对系统性能的影响。
02
CATALOGUE
滑模变结构控制方法的基本理论
滑模面的设计
滑模面的定义
滑模面是变结构控制中的 核心部分,它决定了系统 状态到达滑模面的方式和 时间。
滑模面的选择
滑模面的选择应满足可达 性、可达性条件和不变性 条件,以保证系统状态能 够稳定地到达滑模面。
滑模面的优化
滑模变结构控制系统抖振抑制方法的研究的开题报告

滑模变结构控制系统抖振抑制方法的研究的开题报告
一、选题背景
滑模控制作为一种强鲁棒性控制方法,常常被用于解决非线性系统的控制问题。
然而,在滑模控制系统中,存在一些问题,如抖振,它可能导致滑模面产生振荡,影响系统的控制性能和稳定性。
因此,如何减少滑模控制系统中的抖振,提高控制性能和稳定性,成为当前研究的重要问题之一。
二、研究目的
本文旨在探究滑模变结构控制系统抖振抑制方法,提出一种有效的设计方案,减少系统抖振现象,提高系统控制性能和稳定性。
三、研究内容
1. 分析滑模控制系统中抖振产生的原因和机理,研究其对系统控制性能和稳定性的影响。
2. 探究滑模变结构控制系统抖振抑制方法,包括传统的抗抖振滑模控制方法、变结构控制方法、神经网络控制方法等,分析各种方法的优缺点。
3. 根据抖振抑制方法的特点和应用条件,设计出一种适合滑模变结构控制系统的抖振抑制方法,并进行仿真实验。
4. 对设计的抖振抑制方法进行实验验证,比较不同抖振抑制方法的控制性能和稳定性,在实际工程应用中具有较好的可行性。
四、研究意义
通过本研究的探究和设计,可以解决滑模控制系统中存在的抖振问题,提高系统控制性能和稳定性。
此外,该研究还能为后续滑模控制系统设计提供一定的参考和借鉴。
五、研究方法
本研究采用文献综述和实验仿真相结合的方法,通过对滑模变结构控制系统抖振抑制方法的深入研究,设计出一种适合滑模变结构控制系统抖振抑制的方法,并进行仿真实验验证。
六、预期结果
通过研究和实验,预计可以获得一种有效的滑模变结构控制系统抖振抑制方法,并在其控制性能和稳定性方面得到较好的表现,为后续实际应用提供一定的参考和借鉴。
滑模变结构控制
第1章绪论滑模变结构控制简介变结构控制(VSC: Variable Structure Control)本质上是一类特殊的非线性控制,其非线性表现为控制的不持续性,这种控制策略与其它控制的不同的地方在于系统的“结构”并非固定,而是能够在动态进程中,按照系统当前的状态(如误差及其各阶导数等),有目的地不断转变,迫使系统依照预定“滑动模态”的状态轨迹运动,所以又常称变结构控制为滑动模态控制(SMC: Sliding Mode Control),即滑模变结构控制。
由于滑动模态能够进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数转变及扰动不灵敏、无需系统在线辩识,物理实现简单等长处。
该方式的缺点在于当状态轨迹抵达滑模面后,难于严格地沿着滑面向着平衡点滑动,而是在滑模面双侧来回穿越,从而产生哆嗦。
变结构控制出现于50年代,经历了40余年的进展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方式,适用于线性与非线性系统、持续与离散系统、肯定性与不肯定性系统、集中参数与散布参数系统、集中控制与分散控制等。
而且在实际工程中逐渐取得推行应用,如电机与电力系统控制、机械人控制、飞机控制、卫星姿态控制等等。
这种控制方式通过控制量的切换使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰的时候具有不变性,正是这种特性使得变结构控制方式受到各国学者的重视。
变结构控制进展历史变结构控制的进展进程大致可分为三个阶段:(1)1957-1962年此阶段为研究的低级阶段。
前苏联的学者Utkin和Emelyanov在五十年代提出了变结构控制的概念,大体研究对象为二阶线性系统。
(2)1962-1970年六十年代,学者开始针对高阶线性系统进行研究,但仍然限于单输入单输出系统。
主要讨论了高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情形。
(3)1970年以后在线性空间上研究线性系统的变结构控制。
滑模变结构控制系统的抖振抑制方法研究

滑模变结构控制系统的抖振抑制方法研究滑模变结构控制系统是一种常用的控制方法,它可以有效地抑制系统的抖振。
在实际应用中,抖振是一种常见的问题,它会影响系统的稳定性和精度,因此需要采取相应的措施来解决。
滑模变结构控制系统的抖振抑制方法主要包括两个方面:一是设计合适的滑模控制器,二是采用适当的控制策略。
设计合适的滑模控制器是抑制抖振的关键。
滑模控制器是一种非线性控制器,它可以通过引入滑模面来实现对系统的控制。
在滑模控制器中,滑模面是一个超平面,它可以将系统状态空间分为两个部分,一部分是滑模面上方的状态空间,另一部分是滑模面下方的状态空间。
通过控制滑模面的移动,可以实现对系统的控制。
在设计滑模控制器时,需要考虑系统的动态特性和控制要求,选择合适的滑模面和控制参数。
通常情况下,滑模面的选择应该满足系统的稳定性和抗干扰性要求,同时控制参数的选择应该考虑系统的动态响应和控制精度要求。
采用适当的控制策略也是抑制抖振的关键。
在滑模变结构控制系统中,常用的控制策略包括滑模控制、自适应控制、模糊控制等。
这些控制策略可以根据系统的特点和控制要求进行选择和组合,以实现对系统的抖振抑制。
例如,在滑模控制中,可以采用鲁棒滑模控制和变结构滑模控制等方法,通过引入滑模面和滑模控制律来实现对系统的控制。
在自适应控制中,可以采用模型参考自适应控制和自适应滑模控制等方法,通过引入自适应控制律来实现对系统的控制。
在模糊控制中,可以采用模糊滑模控制和模糊自适应控制等方法,通过引入模糊控制律来实现对系统的控制。
滑模变结构控制系统的抖振抑制方法是一种有效的控制方法,它可以通过设计合适的滑模控制器和采用适当的控制策略来实现对系统的抖振抑制。
在实际应用中,需要根据系统的特点和控制要求进行选择和组合,以实现最优的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x1,x2
改进的滑模变结构控制趋近律设计
u
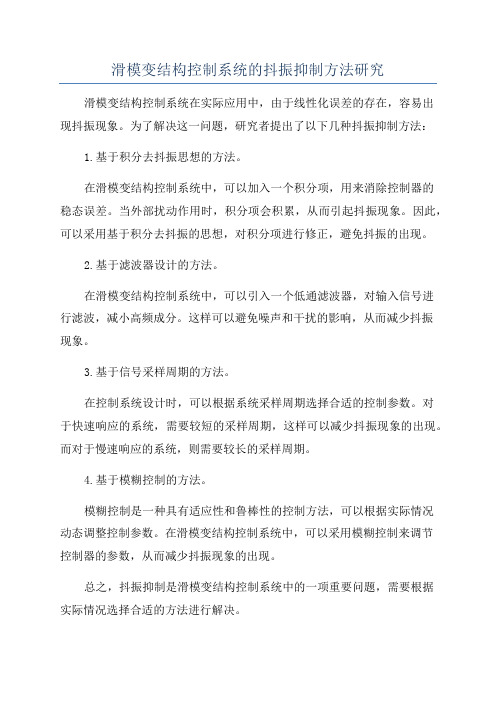
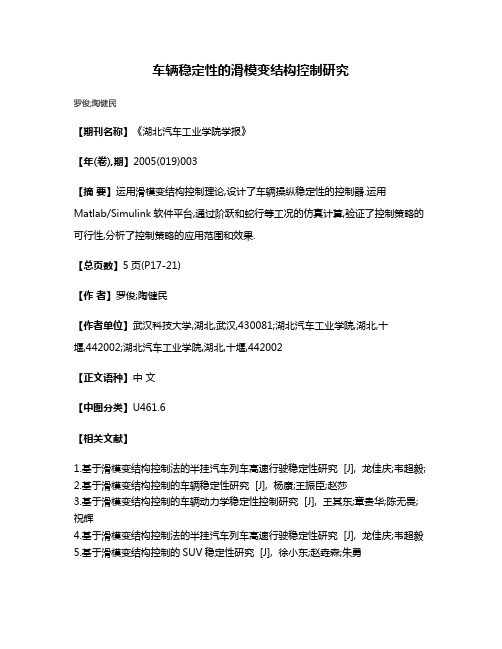
1.5
1
0.5
0
-0.5
-1
-1.5
0
2
4
6
8
10
time(s)
1
0.5
0
-0.5
-10
2
4
6
8
10
time(s)
u
0.6
0.4
0.2
0
-0.2
-0.4
0
2
4
6
8
10
time(s)
图5.1(左上) 符号函数趋近律控制 图5.2(右上) 传统饱和函数趋近律控制 图5.3(左下) 变边界层趋近律控制
s s f (x) d (t) (s)
(8) (9)
改进的滑模变结构控制趋近律设计
定理2.2 在边界层内,采用式(9)所示的趋近律,其中 (s)
满足
s
(s)
L
s
(10)
则可以保证系统的鲁棒性,使得系统状态在滑动模面上滑动。
证明 (见论文2.2.3节中的定理2.3)
的同阶无穷小,其中
n 1, m 0
。
定理3.2 按照下式所设计的滑模面比传统终端滑模的收敛时间更
短,即可以更加快速的使状态到达平衡点。
s0 x1
q
s1 s0 s0 p e s0
(17)
证明 (见论文3.2节中的定理3.2)
意义 设计了一类快速终端滑模面,比传统终端滑模面具有 更快的收敛速度。
针对第2点区别设计如下函数:
1
y
tanh(
2
1
x
)
3
(3)
dy dx
x0
2 (1 tanh(2 x))
2
3tanh(2 x)3
x0
y
1
0.5
0
-0.5
-1
-2
-1
0
1
2
x
图3 双曲正切函数图像
改进的滑模变结构控制趋近律设计
考虑如下SISO非线性系统:
x f (x) Bu f (x) d(t)
1. F (s0 ) 与 s0 同号;
2.
lim
s0 0
s0n F(s0 )
k
,其中,
0
k
, n
1
证明 (见论文3.2节中的定理3.1)
意义 给出了一类传统终端滑模面的设计条件,以该条件作 为研究基础。
改进的终端滑模面设计
推论3.1 F(0) 0
推论3.2
F (s0 )是
s nm 0
2.1 问题描述
传统的改进趋近律方法
削弱抖振
本文的改进趋近律方法
鲁棒性
改进的滑模变结构控制趋近律设计
2.2 改进的滑模趋近律设计
1
1
0.5
0.5
y y
0
0
-0.5
-0.5
-1
-1
-2
-1
0
1
2
-2
x
图1 符号函数图像
1. 连续性;
2. 零点邻域内导数;
3. 边界层。
-1
0
1
2
x
图2 饱和函数图像
改进的滑模变结构控制趋近律设计
u
改进的终端滑模面设计
3.1 问题描述
1.如何进一步提高系统状态收敛速度? 2.解决传统终端滑模面普遍存在奇异性问题。
改进的终端滑模面设计
3.2 一类快速终端滑模面设计
考虑如下SISO系统
x1 x2
x2
a1x1
a2 x2
bu
y x1
传统终端滑模面
s0 x1
q
s1 s0 s0 p
(
x)
sin(
x1
)
0.1cos(
x2
)
,
d
(t
)
0.1sin(t
)
通过极点配置设计滑模面为 s 16x1 9x2 , 系统的初始状态为 x1(0) 0.1, x2(0) 0.1 。
(12)
改进的滑模变结构控制趋近律设计
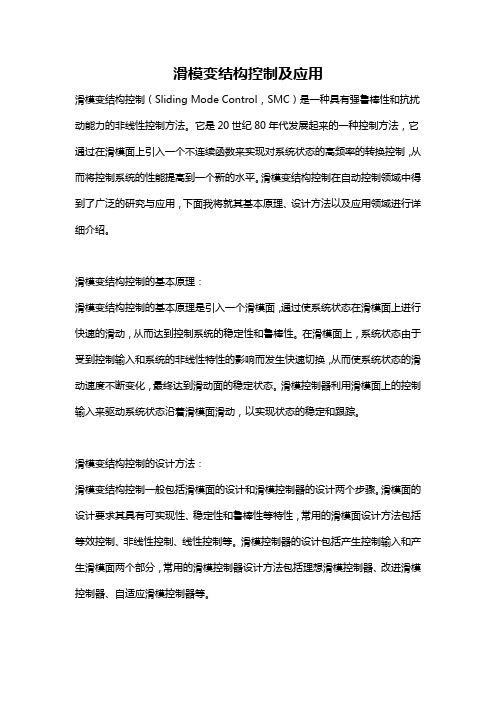
x1,x2
0.15
x1
0.1
x2
tanh1( L )3
2
(7)
证明 (见论文2.2.3节中的定理2.2)
意义 零点邻域内导数并不是影响系统鲁棒性的原因。
改进的滑模变结构控制趋近律设计
本节设计如下变边界层饱和函数为:
sgn(s),
sat2
(s)
s (s)
,
s (s) s (s)
其中 (s) 是一个以 s 作为自变量的正函数。 在边界层内有如下趋近律
滑模变结构控制消抖及 终端滑模面设计研究
答辩人 指导教师
郭为安 郑 艳 副教授
二○○九年七月二日
绪论 改进的滑模变结构控制趋近律设计
改进的终端滑模面设计 高阶终端滑模控制设计
结论与展望
绪论
1.1 滑模变结构控制的概念及基本原理
滑模变结构控制是一种非线性控制方法。它利用滑动模 态这种特殊的控制方式,强迫系统的状态变量沿着人为 规定的相轨迹滑到期望点。
其中 f (x) d(t) L 。
按照双曲正切函数设计趋近律为
1
s
tanh(
2
1
x
)
3
其中 L , 那么在边界层内,有[43]
1
s
tanh(
2
1
s
)
3
f
(x)
d
(t)
(4) (5) (6)
改进的滑模变结构控制趋近律设计
定理2.1 在边界层内,采用(6)式所示的趋近律,只能保证系 统状态在一个准滑动模态带中运行,准滑动模态的宽度为
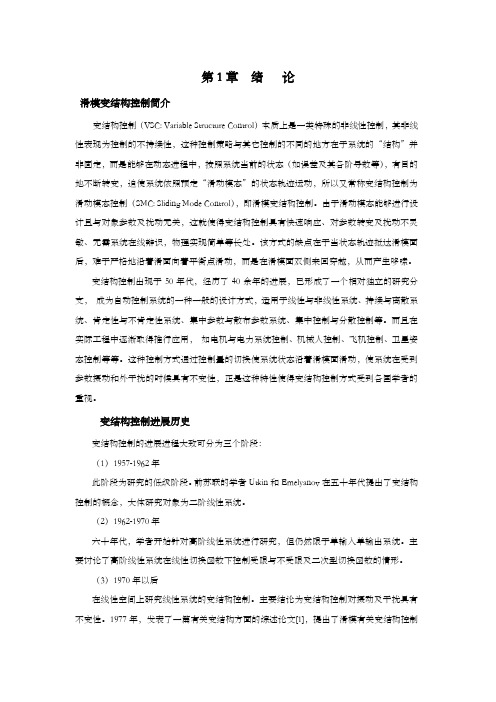
0.05
0
-0.05
-0.1
0
2
4
6
8
10
time(s)
0.15
x1
0.1
x2
0.05
0
-0.05
-0.1
0
2
4
6
8
10
time(s)
x ,x
12
0.15
x1
0.1
x2
0.05
0
-0.05
-0.1
0
2
4
6
8
10
time(s)
图4.1(左上) 符号函数趋近律状态 x1, x2 图4.2(右上) 传统饱和函数趋近律状态 x1, x2 图4.3(左下) 变边界层趋近律状态 x1, x2
等效控制为
ueq
1 b
a1
x1
a2
x2
q
p
q 1
x1 p x2
(13) (14) (15)
改进的终端滑模面设计
定理3.1 考虑(13)式系统,参考文献[57],按照如下形式设
计终端滑模面
s0 x1
(16)
s1 s0 F (s0 )
则 F (s0 ) 需要满足以下条件
意义 通过设计变边界层趋近律可以实现消抖的同时,保证了 系统的鲁棒性。
改进的滑模变结构控制趋近律设计
2.3 仿真研究
考虑如下二阶SISO不稳定系统:
x Ax Bu f (x) d(t)
其中参数设计如下
(11)
0 1 0
0
0
A 1
1
,
B
1
,
f
考虑系统的微分方程如下:
x f (t, x,u)
(1)
ui
uuii
( (
xi (x) 0 si (x) 0
(2)
1.2 滑模变结构控制存在的主要问题
1.抖振 2.系统状态的收敛时间问题 3.滑模趋近阶段不具有鲁棒性
绪论
改进的滑模变结构控制趋近律设计