对球面划分三角形面网格示例
基于球面图像的三角网格分割技术研究
两类方法都可以在数字 图像处理 中找到原型 , 都是 图像分割算法在三角网格上的扩展和延伸 , 常见 的 基于几何特征的三角 网格分割方法包括 : ①基于
图像表示方法并将该方法用于三角网格分割研究。
收稿 日期 :0 1 41 2 1- .8 0
分水岭的方法 ; ②基于聚类的方法两类。
白晓亮 张树生 , ,张开兴 李 亮 贺 强 , , ,马元奎
(. 1西北工业大学 现代设计与集成制造技术教育部重点实验室, 陕西 西安 707 ) 1 2 0
摘
要: 将数字图像处理算法扩展到三角网格一直是一种重要的研究思路, 许多数字几何处理方法来
源于数字图像处理。文章提 出一种三角网格的球面图像表示方法并将其用于三角网格模型的分割 , 球 面图像具有与平面图像类似的简单行列拓扑结构, 具有 图形和图像双重特征。基 于球面图像的网
方法和基于几何特征的方法两类。基于拓扑特征的 方法首先从 网格模型 中抽取轴线结构 ( 骨架) 如 的 形 状描 述 , 后据 此 完 成 网格 分 割 J 然 。基 于拓 扑 特
征的分割往往 针对 自然界物体 的分割 , 例如 人 、 动 物、 植物等。基于几何特征 的方法 是最为常见 的网格分割方法之一 , 在机械制造领域内应用广泛 ,
基 于分 水岭 方法 的基本 思 想是找 到 子 网格 之 间 的分界线( 即分水岭) , J然后根据分界线将模型分
网格 , 因此非 O亏格 三 角 网格 无 法 直接 转 化 为球 面 一
图像 , 必须通过规则化处理分裂为多个 0亏格模型 . 后才能转化成球面图像 , 幸运的是 由互联 网或光学 测量获得 的三角网格模型多数是 0亏格模 型, 一 可以
三角网格以其关联结构简单、 表达能力丰富、 绘 制手段直接 、 便于扫描获取等优点成为最为常用 的 三维模型表示形式之一。三角 网格分 割… 是进行 逆向工程 、 三维模型检索u J计算机动画 等研究 “、 的基础 , 在制造行业 、 影视动画、 生医学工程等领域 应用广泛。目 前互联网、 局域 网等环境下可共享三 角网格模型的数量已经很多, 并且随着光学扫描、 三 维重建等技术的发展和普及 , 可共享三角 网格模型 的数量将变得越来越多, 三角 网格分割 的应用需求 也将越来越多。
球面三角学

球面多边形
在球面上,由大圆的弧所包围的区域称为球面多边形,但要注意,不同于平面上的情形,在球面上’双角’ 是可能存在的。(两个弧夹出两个角的三角形类似物)(可由剥橘子时剥下来的橘子皮想像)
这些多边形的边长(弧长),可以利用球心角很方便的来测定,将弧的两端所对应的球心角乘上半径便是边长。 要注意的是,这些角都必须用径度量来量度。.
球面三角学
数学术语
目录
01 球面上的线
03 球面角超
02 球面三角形 04 球面公式
球面三角学是球面几何学的一部分,主要在处理、发现和解释多边形 (特别是三角形)在球面上的角与边的 和关联。在天文学上的重要性是用于计算天体轨道和地球表面与太空航行时的天文导航。
球面上的线
在球壳的表面,最短的距离是大圆上接近直线的弧线,也就是圆弧的圆心与球壳的球心是同一点。例如:地 球上的子午线和赤道都是大圆。所谓行星表面的直线,就是球面上两点之间最近距离的大圆弧线(如果你把自己拘 束在球面上的直线上)。(参看:大地测量学)
球面公式
球面三角形的基本公式 球面三角形的基本公式(又叫基本定理)有正弦公式、边的余弦公式、角的余弦公式、余切公式、五元素公式 等。除正弦公式外,每一类公式仅举一例如下。 如图1所示的球面三角形中,正弦公式有: 边的余弦公式有: 角的余弦公式有: 余切公式有: 五元素公式有: 解算球面直角三角形公式 球面三角形中只要有一个角等于,该球面三角形就是球面直角三角形。知道球面三角形中的部分元素求解另 一部分元素叫解球面直角三角形。解球面直角三角形的公式很多,仅举几例。 已知两直角边b、c,求斜边a:
谢谢观看
例如球面三角形三个角都是 (弧度)时,每个边长都是大圆弧的1/4,大圆弧对应的圆心角为,其1/4则 为。
球面网格及其应用

物理模拟方法
04
基于物理模拟原理,通过模拟流场、重力场等 方式生成球面网格,如流体动力学模拟、重力
场模拟等。
02
球面网格的应用领域
地理信息系统
地理信息系统(GIS)使用球面网格 来模拟地球表面,提供地图绘制、地 理数据分析和空间查询等功能。
GIS中的球面网格可以与其他数据源 集成,如卫星遥感数据、气象数据和 人口统计数据等,以提供更全面的地 理信息。
球面网格的实际案例分析
地理信息系统中的球面网格应用
总结词
地理信息系统利用球面网格进行地理数据的组织和展示,提高空间查询和分析的 效率。
详细描述
地理信息系统(GIS)通过将地球表面划分为一系列的网格单元,即所谓的“格网”, 来进行地理数据的组织和展示。这种球面网格能够更好地适应地球的球面形状,减 少投影变形,提高空间查询和分析的精度和效率。
球面网格的生成方法
几何方法
01
基于几何原理,通过构造多边形或多面体来生 成球面网格,如多面体展开法、球面多边形法
等。
分形方法
03
利用分形几何学原理,通过迭代或递归方式生 成球面网格,如Mandelbrot集、Julia集等。
参数化方法
02
将球面参数化为平面区域,然后对平面区域进 行网格生成,再将网格映射回球面,如经纬度
天文学中利用球面网格进行天文数据的 处理和分析,提高天文研究的精度和效 率。
VS
详细描述
在天文学中,球面网格被广泛应用于天文 数据的处理和分析。通过将星空划分为一 系列的网格单元,天文学家可以更加方便 地统计和分析天体的分布、运动等特性, 提高天文研究的精度和效率。
THANKS
对球面划分三角形面网格示例

• 然后点击 OK,回到 定义材料属性对话框:
定义单元类型
• 然后点击上面菜单中的 Material > Exit 或右上角的 叉号 结束材料定义。
定义单元类型பைடு நூலகம்
下面,点击菜单项: Main Menu > Proprecessor > Meshing > MeshTool 打开网格划分工具
定义单元类型
定义单元类型
点击 Close 关闭单元类型对话框,再随意定义一种材料: Main Menu > Proprecessot > Material Props > Material Models > 弹出定义材料属性对话框 > 点击材 料 1 > 在右边查看中,点击 Structural > Linear > Elastic > Isotrpic > 在材料性能输入窗口中输入相应的材 料属性:
在 MeshTool 中,设置网格参数如下: 激活 Smart Size 选项,移动滚动条,使 其下方显示的值为 4;在 Mesh 区,选 择划分网格的实体为 Areas,Shape 为 Tri (三角形);方式为 Free (自由网格划 分)。然后点击 Mesh 按钮:
定义单元类型
弹出拾取实体对话框,在其中点击 Pick All,对整个球的外 表面划分网格,结果如下:
定义单元类型
菜单路径:Main Menu > Proprecessor > Element Type > Add/Edit/Delete > 在弹出对话框中点击 Add
定义单元类型
弹出单元类型库对话框如下:
定义单元类型
在其中,选择 > Shell > Elastic 4node 63,然后 OK,回 到 单元类型 对话框:
基于球面图像的三角网格模型分割
21 0 2年 6月
西
南
交
通
大
学
学
报
Vo . No. 147 3
J OUR NAL OF S OUT HW E T JAO ONG UNI RST S I T VE I Y
Jn 02 u .2 1
文章编号 : 2 82 2 (0 2 0 - 5 -7 0 5 —74 2 1 )30 80 4
meh d fr t a g l r me h t o o r n u a s mo es a e o s h rc l ma e w s r p s d W i ti meh d i dl b s d n p e ia i g s a p o o e . t hs h to
g o ti in l o t a g lr e me rc sg a s f a r n u a me h i s mo e a e d l r ma p d n o p e c l ma e t r u h p rc l p e i t s h r a i g s h o g s he a i i paa trz t n a d pa to fa s he e r me eia i n  ̄iin o p r .Th n t e s h rc li g s a e s g n e o hitc td 0 e h p e a ma e r e me td by s p sia e i
i g rc sigag  ̄ h frgo rw n n e in megn . Fn l ,te sg nain rs l o ma epo esn o t mso e in go iga d rgo rig ial h e me tt eut f l y o
《球面网格及其应用》课件
正十二面体剖分法
通过将球面分解成正十二面体 来构造球面网格。
球面网格的应用
1 天体物理学中的数值 2 地球科学中的地形高 3 生物学中的蛋白质形
计算
度数据可视化
状计算
利用球面网格进行天体物 理学领域中的数值计算和 模拟。
通过球面网格将地形高度 数据可视化,如地球表面 的地图。
《球面网格及其应用》 PPT课件
欢迎来到《球面网格及其应用》的PPT课件!在本课件中,我们将深入探讨球 面网格的定义、构造和应用领域,一起来探索这个重要的数学工具吧!
什么是球面网格
• 球面网格将球面细分成若干个小网格。 • 每个小网格一般是正多边形,边长相等。
球面网格的构造
三角剖分法
通过将球面分解成三角形来构 造球面网格。
使用球面网格计算蛋白质 的形状和结构。
球面网格的计算
• 通过纬度和经度表示点在球面上的位置。 • 利用三角形面积计算球面上的距离。 • 利用球心和点之间的夹角计算距离。
球面网格的优缺点
优点:准确地表示球体形状与点 距离
球面网格能够准确地表示球体的形状和各个点之间 的距离。
缺点:构造和计算较为复杂
球面网格的构造和计算需要消耗大量的计算资源。
结语
球面网格是一个重要的数学工具,应用广泛,如天体物理学、地球科学和生 物学等领域。球面网格的计算和优化是一个开放性的研究领域,在未来仍有 很大的发展空间。
球面网格生成与模拟算法

球面网格生成与模拟算法一、引言球面网格生成与模拟算法是计算机图形学中一个重要的研究领域,它关注的是如何在球面上生成高质量的三角网格,并模拟球面上的各种物理现象。
本文将介绍常见的球面网格生成与模拟算法,包括球面离散化、球面上的点云生成、三角网格生成和球面物理模拟。
二、球面离散化球面离散化是将球面上的点转化为离散的数据表示的过程。
常见的方法有经纬度网格划分、正二十面体离散化和球面四叉树分解。
经纬度网格划分将球面按经度和纬度进行网格划分,生成规则的正方形或矩形网格。
正二十面体离散化通过将正二十面体分解为多个小三角形来表示球面上的点。
球面四叉树分解将球面划分为四个象限并递归地进行细分,用于高效地表示球面上的点。
三、球面上的点云生成球面上的点云生成是生成球面上分布均匀、具有一定随机性的点云的过程。
常见的生成方法有球面上的均匀采样和球面融合。
球面上的均匀采样通过在球面上均匀采样点来生成点云,可以使用纬度和经度来确定采样点的位置。
球面融合则是通过将多个球面上的点云融合在一起,生成更多样化的点云。
四、三角网格生成三角网格生成是在球面上生成连续且无重叠的三角形网格的过程。
常见的生成方法有三角化、球面上的Delaunay三角化和小球面投影。
三角化将球面上的离散点连接成三角形网格,常用的算法有Delaunay三角化算法和Ear Clipping算法。
球面上的Delaunay三角化是在球面上生成满足Delaunay三角形条件的三角网格,常用的算法有球面上的Bowyer-Watson算法和球面上的Lawson算法。
小球面投影则是将球面上的点投影到一个小球上,然后在小球上进行三角网格生成。
五、球面物理模拟球面物理模拟是模拟球面上的物理现象的过程,包括刚体运动、布料仿真和流体模拟。
在球面上进行刚体运动模拟时,需要考虑刚体的运动轨迹和碰撞检测。
布料仿真则是模拟球面上布料的变形和运动,常用的算法有质点弹簧系统和有限元方法。
流体模拟是模拟球面上的流体流动和湍流效应,常用的算法有基于网格的方法和粒子系统方法。
基于球面三角网格逼近的等距曲面逼近算法

基于球面三角网格逼近的等距曲面逼近算法*浙江大学CAD&CG 国家重点实验室 刘利刚 浙江大学数学系 王国瑾摘 要 本文给出了一种基于球面三角网格逼近的等距面逼近新算法。
利用三角网格逼近基球面,然后计算此三角网格按中心沿原曲面扫掠而成空间区域的边界作为等距曲面的逼近。
该算法计算简单,方便地解决了整体误差问题,而且所得到的逼近曲面是与原曲面同次数的NURBS 曲面。
关键词 等距曲面,球面,三角剖分,曲面逼近。
0 引 言等距曲线/曲面(offset)在数控机床运动轨迹计算、基于公差带分析的误差理论研究以及带厚度薄片实体(如汽车车身、箱包等)的计算机辅助几何设计中有着广泛的应用。
关于平面曲线的等距曲线已有大量的研究[1—5],但对等距曲面的研究工作则相对较少[6—7]。
设空间参数曲面R :),(v u r r =为正则的, 距离为d 的等距曲面d R 为),(),(),(v u d v u v u d n r r ⋅+=。
由于法向量),(v u n 的分母中出现根式,一张NURBS 曲面的等距曲面一般不再是NURBS 曲面,从而无法被通用的CAD/CAM 系统进行有效的处理。
Farouki [8]给出了三类简单实体(凸多面体、旋转体和拉伸体)表面的等距曲面的精确计算。
Martin [9]证明了Dupin 曲面(曲率线为圆弧的曲面)的等距曲面也是Dupin 曲面。
Pottmann [10]提出了PH 曲面(具有有理等距曲面的一类有理曲面)的概念,并且给出了具有有理等距曲面的可展曲面的显式表达。
吕伟[11]证明了抛物面、椭球面和双曲面的等距曲面是有理的。
Pottmann 等[12]证明了不可展有理直纹面的等距曲面在整个空间是可有理化的。
对于更为复杂的曲面,生成其等距曲面颇为困难。
Farouki [13]利用双三次Hermite 多项式曲面来插值逼近等距曲面。
1999年,Piegl 和Tiller [14]对NURBS 曲面的等距曲面逼近提出了一种新的算法,他们首先判断曲面上包含平面片或旋转面片(球面、环面、锥面和柱面等)的部分;然后根据曲率大小对其它曲面片部分的等距面片进行采样,利用NURBS 曲面进行插值;最后在允许误差范围内去除不需要的控制节点。
球体划分网格过程
7.几何模型已经建立完毕,下面可以进行网格化分了,结果如图七所示,对话框如图八所示。
图七
图八
8.如果步骤7中提示,solid1不是triparameteric体,如图九所示,则需吧solid1转为triparameteric体,方法见图十。然后进行步骤7即可。
图九图十Biblioteka 9.可以采用Verify命令观察自由边和自由面,并用Equivalence命令合并重合节点。
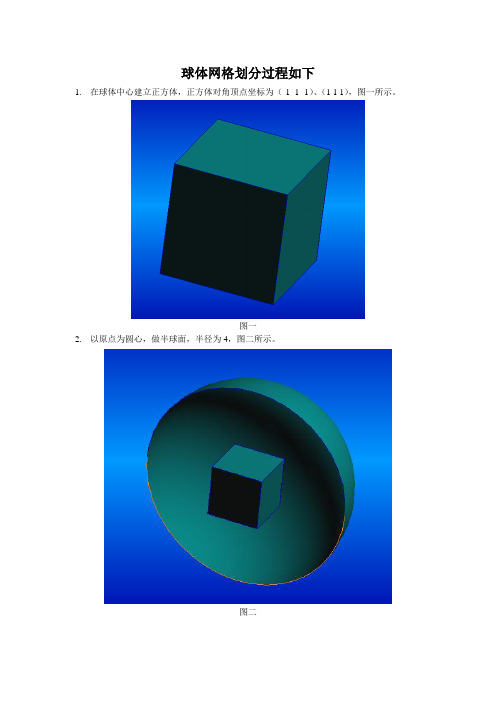
球体网格划分过程如下
1.在球体中心建立正方体,正方体对角顶点坐标为(-1 -1 -1)、(1 1 1),图一所示。
图一
2.以原点为圆心,做半球面,半径为4,图二所示。
图二
3.将正方体与半球面对应的一个面的四条边投影到半球面,得到四条曲线,图三所示。
图三
4.利用步骤3得到的四条曲线,构建曲面,删除步骤2的曲面后,如图四-a所示,注意,该曲面为球面的六分之一。对话框设置如图四-b所示。
10.到此结束。
图四-a图四-b
5.利用步骤4中得到的曲面和正方体的一个相应曲面,建立一个体solid 2,如图五-a所示,对话框设置如图五-b所示。
图5-a图5-b
6.将步骤5得到的solid 2分别绕X、Y轴旋转复制,得到一个球体,该球体有一个正方体(步骤1所得)和6个六面体组成(solid 2及本步骤所得的另外5个)。
fluent球面划分
fluent球面划分Fluent球面划分在计算机图形学中,球面划分是一个重要的概念。
Fluent球面划分是一种常用的球面划分方法,它可以将球面分割成若干个小的三角形面片。
本文将介绍Fluent球面划分的原理和应用。
一、Fluent球面划分的原理Fluent球面划分是基于有限元法的一种球面划分技术。
它通过将球面分割成多个小的三角形面片来近似表示球面。
在Fluent球面划分中,三角形面片的大小和形状可以根据具体的需求进行调整,从而得到更精确的球面表示。
Fluent球面划分的原理主要包括以下几个步骤:1. 球面网格的生成:首先,需要生成一个初始的球面网格。
可以使用传统的球面网格生成算法,如球体递归细分算法或者四面体划分算法来生成初始网格。
2. 网格优化:生成初始网格后,需要对网格进行优化。
优化的目标是使得网格的面片尽可能接近球面,从而提高球面划分的精度。
可以采用多种优化方法,如Lloyd算法、Delaunay三角网格优化算法等。
3. 球面划分:在网格优化后,可以开始进行球面划分。
将球面分割成多个小的三角形面片,并保持面片的连通性。
可以使用Delaunay三角化算法或者Voronoi图算法来实现球面划分。
4. 网格平滑:球面划分完成后,可以对网格进行平滑处理,以进一步提高球面划分的质量。
可以采用各种平滑算法,如Laplacian平滑算法、Taubin平滑算法等。
二、Fluent球面划分的应用Fluent球面划分在计算机图形学和计算机模拟领域有着广泛的应用。
它可以用于生成真实感的球面模型,如地球表面模型、行星模型等。
同时,Fluent球面划分还可以用于计算机动画、虚拟现实等领域。
1. 地球表面模型:Fluent球面划分可以用于生成高精度的地球表面模型。
通过将地球划分成小的三角形面片,并添加地理信息数据,可以生成具有真实感的地球模型。
这对于地理信息系统、气象预测等应用非常重要。
2. 行星模型:Fluent球面划分还可以用于生成其他行星的模型,如火星、月球等。
网格划分基本技巧——圆和椭圆

基本技巧(圆或者椭圆的画法):三角形拓扑和钱币原理的比较画法, 钱币, 三角形, 椭圆, 拓扑画法, 钱币, 三角形, 椭圆,拓扑先上图,拓扑关系如图所表示。
第一图是三角形(或者扇形)画法,第二种是钱币原理。
于我个人来说,前者略快一点,前者需要MESHSTLY进行控制,从而内部方形的大小可以控制,而钱币权利分面略慢,而且控制方形的大小的选择也不那么方便---拓扑分开了就不能自由选择了。
我个人是基本上才用前者。
不知道大家的喜好是什么。
提供给初学者作为一个最基础的练习吧,因为我看到很多人,包括一些周围的人,工作也2年3年了,连画一个标准面都乱七八糟。
1评分次数lzkhnu本主题由 lzkhnu 于 2010-12-2 08:52 分类收藏分享评分回复引用订阅报告道具 TOPlionkingsimba1级会员帖子80积分仿真币-72 阅读权限52#发表于2010-11-11 20:44|只看该作者版主可否详细介绍一下两种的画法三角画法如何使用meshstly控制?钱币原理如何控制方形大小?多大控制的网格会比较好?版主分享一下经验俺是菜鸟,有时用钱币原理画的网格质量还是不太好忘赐教回复引用报告道具TOPchengang2001ren3#发表于 2010-11-11 20:49| 只看该作者我一般用后者,是比较慢一点1级会员帖子45 积分0 仿真币38 阅读权限5回复 引用报告 道具TOPiambadman版主帖子 1275 积分25仿真币3682 阅读权限1004#发表于2010-11-11 22:18 | 只看该作者1,调整外圈节点,可以改变中间的“方形”的大小以及是否是全4边形。
2,默认的画法是不会出现这样的效果的,所以,需要在“meshstyle"中,选择两个选项,1,element type 选择QUAD ,2是“mesh method"里面选择“map as triangle"(这个很重要),确定是三角形标准结构。
任意曲面的三角形网格划分

任意曲面的三角形网格划分任意曲面的三角形网格划分是基于三角形网格生成算法实现的。
这些算法通常采用参数化方法表示曲面,并使用分割线段、迭代细分等方式将曲面划分为许多小的三角形网格。
具体实现过程中,可以采用不同的三角形网格生成算法,如Loop subdivision、Butterfly subdivision等。
这些算法在处理复杂曲面时具有不同的特点和适用范围。
任意曲面的三角形网格划分的优点主要表现在以下几个方面。
三角形网格结构清晰,易于理解和实现。
这种网格划分操作简单,可快速生成并处理大量网格数据。
三角形网格具有广泛的适用范围,可以适用于各种不同形状和性质的曲面。
任意曲面的三角形网格划分在计算机图形学、几何计算和可视化等领域有着广泛的应用。
在计算机图形学中,三角形网格是构建复杂三维模型的基础,也是进行渲染、动画等操作的基础。
在几何计算中,三角形网格可用于表面重建、形状匹配、有限元分析等任务。
在可视化领域,三角形网格可以用于生成高质量的渲染图像和动画,也可用于科学计算结果的可视化。
在使用任意曲面的三角形网格划分时,需要注意以下问题。
由于这种网格生成算法的计算量较大,因此需要优化算法以提高生成效率。
网格生成过程中需要存储大量的网格数据,因此需要合理组织数据结构以减少存储需求。
实现复杂度较高,需要仔细设计算法和数据结构以避免错误和漏洞。
任意曲面的三角形网格划分是一种非常重要的技术,在计算机图形学、几何计算和可视化等领域有着广泛的应用。
通过深入了解这种网格划分的原理和优点,掌握其应用场景及注意事项,我们可以更好地利用这种技术来处理和计算各种不同形状和性质的曲面。
曲面重构是一种从几何形状中提取特征并生成新的几何表示的技术,在计算机图形学、计算机视觉、生物医学工程等领域具有广泛的应用。
三角形网格是一种常见的曲面表示形式,具有灵活性和高效性,因此成为曲面重构领域的重要研究对象。
本文旨在探讨三角形网格上曲面重构技术的现状、研究方法、研究成果及未来发展方向。
用球面混合曲率图像比较三角网格模型的相似性
用球面混合曲率图像比较三角网格模型的相似性马元魁;张树生;白晓亮【摘要】The existing current similarity comparison algorithms cannot describe local features of models in detail, a new shape similarity comparison method of zero-genus triangular mesh models is proposed. The model is mapped onto a unit sphere after pose alignment to generate the spherical hybrid curvature image, then is decomposed by spherical harmonic function, and one-dimensional rotation invariant shape descriptor is extracted for similarity comparison. It is shown that the spherical hybrid curvature image enables to clearly discriminate different types of 3D model surfaces with robust mesh resolution and stable feature extraction.%针对现有相似性比较算法对模型的局部细节特征描述不足的现状,提出了一种零亏格三角网格模型形状相似性比较的新方法.在对三角网格模型进行姿势配准以后,映射三角网格模型到单位球上,并用多种曲率生成球面混合曲率图像,然后用球面调和函数对其分解,提取一维旋转不变的形状描述子进行相似性比较.实验结果表明,采用球面混合曲率图像可以对三角网格模型中不同类型的曲面进行清楚的区分;文中提出的方法能更细致地区别三维模型,对网格分辨率鲁棒且特征提取稳定,因此可以提高三维模型检索的有效性.【期刊名称】《西安交通大学学报》【年(卷),期】2012(046)005【总页数】6页(P97-101,131)【关键词】三角网格模型;相似性比较;球面混合曲率图像【作者】马元魁;张树生;白晓亮【作者单位】西安工业大学理学院 710032 西安;西北工业大学现代设计与集成制造技术教育部重点实验室 710072 西安;西北工业大学现代设计与集成制造技术教育部重点实验室 710072 西安【正文语种】中文【中图分类】TP391三维模型检索作为一种管理和重用三维模型的重要技术是目前的研究热点,多数的三维模型检索研究以三维模型的整体相似性为基础,可以从整体形状的角度实现三维模型的管理及重用.三维模型的相似性比较是三维模型检索的核心,相似性比较算法根据使用的特征提取技术不同,可以划分为空域空间、频域空间和基于图像的比较方法.空域空间的比较方法是最直接的比较方法,大多数比较方法都是基于空域空间的.基于空域空间的比较方法大多使用了统计学方法,通过统计数据来描述模型的形状特征.不同的比较方法使用了不同的统计计算方法,典型方法包括形状直方图[1]、点密度[2]、加权点集[3]、形状分布[4]以及基于矩[5]的方法,其中使用最多、效果最好的方法是形状分布方法.形状分布方法的优点是不需要对模型进行对齐等预处理,并且具有旋转不变性,但缺点是要计算大量的统计数据,因此比较的效率较低.频域空间比较方法将三维模型转换到频域空间,在频域空间提取特征进行比较.频域空间比较方法有傅里叶变换[6]、球面调和分析[7]和小波变换[8]等,其中傅里叶变换和球面调和分析研究得较多.不管是傅里叶变换还是球面调和分析方法,其优点都是特征提取稳定,比较效果在一定情况下好于空域方法.基于图像的比较方法有基于二维视图、基于几何图像的比较方法[9-10]等.基于二维视图进行相似性比较的方法需要计算三维模型的多幅视图[11].Gu等[12]提出了用二维几何图像表示三维网格,算法需要把三维网格切开然后映射到单位正方形上.Laga等[10]提出了一种基于几何图像的形状匹配算法,然而,相似的三维模型不能保证有相同的切割路径,因为切割路径的选择有多种,而不同的切割路径对应的几何图像是不同的.扩展的高斯图像用法向量作为几何特征来比较形状的相似性,但扩展的高斯图像对于非凸物体是不唯一的,存在着歧义.Liu等[13]提出了基于球面法向图像的形状相似性比较方法,把三维网格模型的法向量经共形映射映射到单位球上,不需要把网格切开,而且每个形状的球面法向图像是唯一的.另外,最近有学者还提出了基于温度分布的形状描述子,对三维模型进行了相似性比较[14-15].本文提出了基于球面混合曲率图像以及球面调和分析的形状相似性比较方法,把三维网格的多种曲率特征经球面参数化映射到球面上,映射是一一对应的,而且球面混合曲率图像更能体现三维网格的几何特征,所以能够更好地区别三维形状.1 背景知识1.1 姿势配准姿势配准可以消除由不同姿势引起的特征向量的变化,考虑的因素一般包括比例缩放、平移和旋转.通过模型平移、旋转和缩放,使相比较的模型位置、方向、大小调整为一致.具体过程是:①把三角网格模型的质心或者几何中心平移到原点;②计算缩放因子,对三角网格模型进行归一化;③旋转三角网格模型,使模型的3个主轴与坐标轴重合[16-17].1.2 球面参数化为了分析三维物体的几何特征,一般先映射物体到平面域或球面域上,然后在平面或球面上进行分析.对于一个闭曲面,映射到球上比映射到平面上产生的变形小.由互联网或光学测量获得的三角网格模型多数是零亏格模型,或很容易转化为零亏格模型(例如,光学测量获得的模型经过简单的孔洞修补即可转化为零亏格模型),对于大量零亏格的三维模型,参数化到与它拓扑同胚的球面更为合理.本文假设非零亏格三角网格模型已经转化为零亏格模型.在现有球面参数化方法中,累进网格参数化方法可以快速地处理复杂网格,运算速度非常快,所以本文采用周昆[18]的累进网格参数化方法,其算法如下.步骤1 简化网格获得一个含有很少测量点的模型,记录简化过程形成一个渐进网格.步骤2 采用投影法完成简化后网格模型的球面参数化.步骤3 通过点分裂操作还原网格模型,同时计算新插入顶点的参数.1.3 球面调和分析三角网格模型被映射到球上以后,用几何特征来作相似性比较.Schudy等[19]利用球面调和分析把曲面表示成一个球面上的函数.本文把映射到球面上的某个曲率特征展开成球面调和函数的一个线性组合,即式中:Yml(θ,φ)为l阶m 次的球面调和分析的正交基;l为频率带宽;m为每个频带下的频率分量,且|m|≤l;Pml 为Legendre多项式;Cml 为系数,由式(4)惟一决定;Ym*l(θ,φ)为Yml(θ,φ)的复共轭.复值球面调和函数可以组合成具有同样的正交性和完备性的实值函数,实值球面调和函数更适合于描述实值曲面函数.曲面函数往往被定义为固定l的实值球面调和函数的组合,常用于形状分析和变形研究.实值球面调和函数的定义如下由Cml构成的向量在进一步的相似性比较中用于表示原形状的特征向量.2 相似性比较2.1 球面混合曲率图像大多数机械零件都是由常见曲面如平面、球面、圆柱面等构成,常见曲面的曲率是它们的特征属性(见表1).虽然某种曲率相等的常见曲面可能类型不同,但是从多种曲率中任选3种取定以后,所对应的常见曲面类型一般只有一种.如高斯曲率等于0的常见曲面有平面与圆柱面,但最大主曲率k1、最小主曲率k2和高斯曲率kg都等于0的常见曲面只有平面.因此,在此采用曲率混合映射法,而不是依靠单一曲率进行映射,这样可以对不同类型的曲面进行清楚的区分.表1 常用曲面的几何属性注:R为球面半径;R1为圆柱面半径;ρ为圆锥面上的点所在纬圆的半径;α为锥的半顶角.曲面类型 k1 k2 kg平面000球面 1/R 1/R 1/R2圆柱面 1/R1 0 0圆锥面cosα/ρ00本文用累进网格参数化方法把曲率映射到单位球上,球面混合曲率图像通过插值经度和纬度网格点生成,插值在球面三角形V1V2V3中的一个网格点为其中P点处的曲率值通过插值原球面三角形V1V2V3顶点的曲率值得到.在曲率值和颜色之间建立映射关系,即可得到球面颜色值式中:K1、K2、Kg分别表示经过如归一化、直方图均衡等预处理后的最大、最小主曲率及高斯曲率.可以选择不同的曲率进行结合映射,以得到不同的颜色值.与球面法向图像[13]相比较,球面混合曲率图像保持了球面法向图像的优点,即通过映射一个闭曲面到球上变形较小,不需要把网格切开,避免了在相似形状模型中不同的切割路径带来的变化,而且不需要从球到多面体的映射.从图1中可以看出,球面混合曲率图像(SCI)比球面法向图像(SNI)及球面位置图像(SGI)具有更好的特性.在球面混合曲率图像中,不同类型的曲面对应了不同的颜色值,而三角网格模型被刻画得更加细致.图1 Fan Disk模型及其球面图像2.2 特征提取与相似性比较本文用球面调和函数分解球面混合曲率图像来进行相似性比较.根据球面调和变换的性质,在每个频带下的能量与球面信号的坐标系旋转变换无关,所以本文把能量大小作为特征向量,即定义模型的形状描述子tl为f(θ,φ)在l的能量在实际应用中,一般使用前N个频带的球面调和分析系数进行球面信号的近似重构.对于三维模型形状的相似性比较,一般选N=16[10],可使球面调和分析近似地重构原球面信号,相应地式(1)可以近似表示为通过f(θ,φ)的采样值来计算Cml,由此得到的特征向量为本文采用最小二乘拟合方法求解线性方程组AX=B,以得到未知量Cm[20]l ,其中即式中输入球面采样点(θi,φi)以及对应的函数值fi,即可得到由Cml构成的未知量由于稠密网格包含高细节的几何信息,对粗分类来说可能用不到,但多分辨率网格却有利于粗到细的分类,因此采用球面参数化的渐进网格.对于多分辨率网格来说,特征向量的大小是可缩放的,即短的特征向量用于第1层次分类,更长的向量用于细分类,这种缩放性通过变化球面调和函数的阶数的最大值就可以得到.在得到模型的形状描述子之后,需要计算2个模型的相似度.本文采用2个模型M1、M2的形状描述子t M1l 、t M2l 之间的欧几里得距离来刻画2个模型的相似度[10],距离越小相似程度越高,即描述子之间的距离为3 实验和讨论以圆柱体为例,计算圆柱体与球体基于不同的球面图像的形状描述子之间的距离(见表2),取球面调和函数的最高阶N=16.从表2中可以看出,利用球面混合曲率图像得到的距离大约是利用球面法向图像、球面位置图像得到的距离的10倍,由此可以看出,球面混合曲率图像更能细致地刻画2个模型的不同.为了验证算法,做了更一般的实验,在美国普渡大学 ESB(Engineering Shape Benchmark)模型库里对 Round Change At End类的部分零件进行了相似性比较.表3给出了部分模型对应的球面混合曲率图像,以及2个模型的形状描述子之间的距离.表中球面混合曲率图像的方向与模型的方向基本一致,这样有利于观察相似模型的球面曲率图像的相似性.如第1组的第1个模型中间最长的圆柱面部分对应其球面混合曲率图像中大片的深灰色部分;第1组的第2个模型左上角的球冠对应其球面混合曲率图像中左上角的浅灰色部分,在上述2幅图像中都可以看到深灰色部分与浅灰色部分,只是它们所占整幅图像的比例不同,这是因为它们所对应的模型上的曲面部分所占整个模型的比例不同所致.表4给出了用本文方法对ESB中Round Change At End类零件以及T Shaped Parts类零件进行比较的结果,表中从左到右按与索引模型的形状描述子之间的距离由小到大排列,比较结果符合实际.表2 圆柱体与球体的比较结果?表3 ESB中Round Change At End类部分零件的比较结果?因为本文球面混合曲率图像形成的过程中用到的球面参数化是基于渐进网格的思想,所以从本文的球面参数化方法中,可以得到同一个三角网格模型的不同分辨率的网格,如图2所示.实验表明,同一个三角网格模型的多分辨率网格模型都被归到了同一类,由此证明本文方法对网格的分辨率是鲁棒的.表4 ESB中Round Change At End类以及T Shaped Parts类零件的比较结果? 图2 原始及低分辨率的Fan disk网格模型4 结论本文基于球面混合曲率图像以及球面调和分析,提出了三角网格模型形状相似性比较的方法.在对三角网格模型进行姿势配准以后,生成球面混合曲率图像,进而利用球面调和函数进行分解,提取了球面混合曲率图像的特征向量,并进行了相似性比较.实验发现,球面混合曲率图像比球面法向图像、球面位置图像具有更好的特性,采用球面混合曲率图像可以对三角网格模型中不同类型的曲面进行清楚的区分.因此,本文方法能够更细致地区别三维模型,对网格分辨率鲁棒且特征提取稳定.【相关文献】[1] ANKERST M,KASTENMLLER G,KRIEGEL H P,et al.3Dshape histograms for similarity search and classification in spatial databases[C]∥Proceedings of the 6th International Symposium on Large Spatial Databases.London,UK:Springer-Verlag,1999:207-226.[2] SUZUKI M,KATO T,OTSU N.A similarity retrieval of 3Dpolygonal models using rotation invariant shape descriptors[C]∥Proceed ings of IEEE International Conferenceon Systems,Man,and Cybernetics(SMC 2000).Washington,DC,USA:IEEE Computer Society Press,2000:2946-2952.[3] TANGELDER J W,VELTKAMP R C.Polyhedral model retrieval using weighted point sets[J].International Journal of Image and Graphics,2003,3(1):209-229.[4] OSADA R,FUNKHOUSER T,CHAZELLE B,et al.Shape distributions [J].ACM Transactions on Graphics,2002,21(4):807-832.[5] SAUPE D,VRANIC D V.3Dmodel retrieval with spherical harmonics and moments [C]∥Proceedings of the 23rd D AGM Symposium on Pattern Recognition.London,UK:Springer-Verlag,2001:392-397.[6] VRANIC D V,SAUPE D.3Dshape descriptor based on 3DFourier transform [C]∥Proceedings of the EURASIP Conference on Digital Signal Processing for Multimedia Communications and Services (ECMCS 2001).Budapest,Hungary:Scientific Association for Info-communications,2001:271-274.[7] VRANIC D V,SAUPE D.Description of 3D-shape using a complex function on the sphere[C]∥Proceedings of the IEEE International Conference on Multimedia and Exp o (ICME 2002).Washington,DC,USA:IEEE Computer Society Press,2002:177-180. [8] PAQUET E,RIOUX M.The MPEG-7standard and the content-based management of three-dimensional data:a case study [C]∥IEEE International Conference on Multimedia Computing and Systems.Washington,DC,USA:IEEE Computer Society Press,1999:375-380.[9] MIN P,CHEN J,FUNKHOUSER T.A 2Dsketch interface for a 3Dmodel search engine[C]∥SIGGRAPH 2002Technical Sketches.New York,USA:ACM,2002:138-138. [10]LAGA H, TAKAHASHI H, NAKAJIMA M.Spherical parameterization and geometry image-based 3Dshape similarity estimation [J].Visual Computer,2006,22(5):324-331.[11]CHEN D Y,TIAN X P,SHEN Y T,et al.On visual similarity based 3Dmodel retrieval [J].Computer Graphics Forum,2003,22(3):223-232.[12]GU Xianfeng,GORTLER S,HOPPE H.Geometry images[C]∥Proceedings of the29th Annual Conference on Computer Graphics and Interactive Techniques.New York,USA:ACM,2002:355-361.[13]LIU Shaojun,LI Jia.Genus-zero shape classification using spherical normal image [C]∥18th Internation al Conference on Pattern Recognition.Washington,DC,USA:IEEE Computer Society Press,2006:126-129.[14]SUN Jian,OVSJANIKOV M,GUIBA L.A concise and provably informative multi-scale signature based on heat diffusion [J].Computer Graphics Forum,2009,28(5):1383-1392.[15]FANG Yi,SUN Mengtian,RAMANI K.Temperature distribution descriptor for robust 3Dshape retrieval[C]∥Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition Workshops.Washington,DC,USA:IEEEComputer Society Press,2011:9-16.[16]VRANIC D V,SAUPE D.3Dmodel retrieval[C]∥Proceedings of Spring Conference on Computer Graphics and Its Applications.Bratislava,Slovakia:Comenius University,2000:89-93.[17]VRANIC D V.3Dmodel retrieval[D].Leipzig,Germany:University of Leipzig,2004.[18]周昆.数字几何处理:理论与应用[D].杭州:浙江大学,2002.[19]SCHUDY R B,BALLARD D H.Towards an anatomical model of heart motion as seen in 4-D cardiac ultrasound data[C]∥Proceedings of the 6th Conference on Computer Applications in Radiology and Computer-Aided Analysis of RadiologicalImages.Washington,DC,USA:IEEE Computer Society Press,1979:145-150.[20]LI Shen,CHUNG M rge-scale modeling of parametric surfaces using spherical harmonics[C]∥3rd International Symposium on 3DData Processing,Visualization and Transmission.Washington,DC,USA:IEEE Computer Society Press,2006:294-301.。
网壳结构

正放四角锥
抽空四角锥
斜置正放四角锥
三角锥柱面网壳
抽空三角锥柱面网壳
清华大学游泳馆
柱面网壳的组合应用—— 成渝高速路二郎收费站
三.球面网壳 当跨度较小时可以 采用单层,也可采 用双层。 球面网壳的网格分 割方法很多,主要 有:
大英博物馆
肋环型球面网壳
施威德勒球面网壳
单层球 联方型球面网壳
面网壳 三向网格型球面网壳
4.影响网壳结构稳定性 主要因素
1. 非线性效应
• 几何非线性:屈曲后的部位由薄膜应力 状态转变为弯曲应力状态
• 材料非线性
• 对于单层网壳几何非线性的影响非常大, 对于双层网壳通常要同时考虑双重非线 性的影响
• 几何非线性的影响随着网壳跨度的增加 而明显增大,材料非线性则随跨度减小 而增大
2. 初始缺陷 网壳结构的初始缺陷包括:
拟壳法按弹性薄壳理论分析求得壳体的内力和位移, 再根据应力值折算为球面或柱面网壳的杆件内力,此 法须经过连续化再离散化的过程。
方法② 离散化方法——矩阵位移法或有限单元法。 矩阵位移法或有限单元法是将网格结构离散为各个 单元,分别求得各单元刚度矩阵及结构的总刚度矩阵, 根据边界条件修正总刚度矩阵后求解基本方程,以得 到各单元节点的位移进而得到杆件的内力。
• 具有负高斯曲率的双曲抛物面稳定性更好
• 网壳规程要求:对单层的球面网壳、圆柱 面网壳和椭圆抛物面网壳以及厚度较小的 双层网壳进行稳定性验算;对双曲抛物面 网壳可不考虑稳定问题。
厚度较小的双层网壳是指厚度小于以下范 围:球面网壳的厚度为跨度的1/30~1/60, 圆柱面网壳的厚度为宽度的1/20~1/50,椭 圆抛物面网壳的厚度为短向跨度的 1/20~1/50。
网壳结构建筑
网壳结构的引出
–中世纪,木材成为穹顶结构的主要覆盖材料; 到19 世纪, 铁的应用为穹顶的发展开创了一个新纪元, 使覆盖大跨 度建筑物成为可能。 – 近代, 钢筋混凝土结构理论的出现及应用使穹顶的厚度 大大降低, 薄壳穹顶受到人们的极大关注, 从而开辟了结 构工程新领域。 1922 年在德国耶拿建造了 土木工程史上第一座钢筋混 凝土薄壳结构----耶拿天文 馆, 其净跨为25m, 顶厚为 60. 3mm, 厚跨比大约为1/ 400.
中国网壳结构的发展
中国网壳结构的发展
– 我国的空间结构在上世纪50年代末较多地采用薄壳结 构、悬索结构,60年代中采用网架结构,80年代较多 地采用网壳结构,直到21世纪,这些比较传统的近代空 间结构,除薄壳结构外,均获得了长期蓬勃的发展,工程项 目遍布全国城镇各地。 – 网壳结构在我国解放初曾有所应用,当时主要是一类 联方型的网状筒壳,材料为型钢或木材跨度在30M左 右,如扬州苏北农学院体育馆、南京展览中心(551厂)、 上海长宁电影院屋盖结构等。
球形的短程线三角形网格的几何构成
球形的短程线三角形网格的几何构成
短程线三角形网格是一种几何构造,在形式上它是一个球形的三角形网格,由
一系列的三角形拼接而成。
它也可以被称为“欧文球网”,发源于20世纪50年代,主要被用于航天技术的空间航行、气体和光的传播以及地图显示。
从结构方面来看,这种形式属于封闭式的三角形网格,与传统的标准或全面性
网格不同,它以每个三角形共享至少一条短边的形式构筑而成。
且它们之间连接依靠共享边的短程线,也就是说,相邻的三角形只有一条共享的边,因此,它的形式比全面性的三角形网格近似于球体的几何形状。
三角形网格构成,短程线三角形网格具有许多优势和特点,它可以非常方便和
有效地构筑抽象几何世界,而且不需要额外的运算量或存储空间来支持这种技术。
此外,它可以非常有效地以小面积移动三角形,以在给定的构筑中获取更多的细节。
它还可以被用于实现自适应自动采样或自动贴图功能,以及用于三维渲染和计算机动画的更精细的表面网格。
随着先进技术的发展,短程线三角形网格日益受到重视,许多应用也得到了不
断的改善,因此它的实用性也要比以往更强。
它的灵活性和属性允许我们以更小的面积来节省空间,然后再用更多的灵活性和细致度来构建复杂的场景几何。
总之,短程线三角形网格作为一种几何构造具有很多优势,更重要的是,它能
够很好地模拟球形表面,在许多领域都得到了广泛的运用。
python匹配最近经纬度的算法
python匹配最近经纬度的算法【原创版】目录1.算法概述2.匹配经纬度的方法3.Python 实现代码4.算法的优缺点正文1.算法概述最近经纬度算法是一种用于查找两个地点之间最短路径的算法。
在众多地理信息系统(GIS)应用中,这种算法具有广泛的应用前景。
通过使用 Python 编程语言,我们可以轻松地实现这一算法,从而在各种场景下快速找到最近经纬度。
2.匹配经纬度的方法在实现最近经纬度算法时,通常采用以下两种匹配方法:(1)哈希表法:将地球表面划分为若干个网格,用哈希表存储每个网格的经纬度信息。
在查询时,通过哈希表快速找到与给定点最近的网格,然后计算两个网格之间的最短路径。
这种方法的优点是查询速度快,但缺点是需要大量的存储空间来存储哈希表。
(2)球面三角法:球面三角法是一种基于球面几何的算法,通过将地球表面分解为若干个三角形,利用三角形的性质计算最短路径。
在Python 中,我们可以使用球面三角库(如`geopy`库)来实现这一算法。
这种方法的优点是存储空间小,但缺点是计算过程较为复杂,查询速度相对较慢。
3.Python 实现代码下面是一个使用球面三角法实现最近经纬度算法的 Python 示例代码:```pythonfrom geopy.geocoders import Nominatimfrom geopy.distance import distancedef get_lat_lng(address):geolocator = Nominatim(user_agent="myGeocoder")location = geolocator.geocode(address)return titude, location.longitudedef find_nearest_location(point, locations):lat_lngs = [(location[1], location[0]) for location in locations]distances = [distance(point, (lat, lng)) for lat, lng in lat_lngs]return min(distances, key=distances.get)if __name__ == "__main__":point_address = "40.7128, -74.0060" # 纽约nearest_location = find_nearest_location((40.7128,-74.0060), ["10175", # 北京"51.5098, -0.1181", # 伦敦"37.421999, 8.8247" # 东京])print("最近地点:", nearest_location)```在这个示例中,我们首先使用`geopy`库获取给定点和备选地点的经纬度,然后使用`find_nearest_location`函数计算最近地点。
球体的六面体网格划分

球体的六面体网格划分
在有限元计算中,球体的网格划分无疑是经常遇到的,鉴于对球体网格划分的特殊要求,我们一般会避开一般通用网格划分的思路,设计专门针对球体的网格划分方法,使划分网格的过程变得相对简单,易操作。
本文介绍在ANSA中,使用立方—球网格方法来实现球体的六面体网格划分。
图1-1是球体的原模型。
立方—球网格方法:
第一步,如图1- 2,需要在球体内部建立一个尺寸适当的六面体。
(本文中,六面体边长约为球体直径的0.5倍)
第二步,如图1- 3,把六面体的十二条边投影到球体表面,球体表面被分成了六个不规则的四边形。
第三步,如图1-4,是六面体的一个面和该面投影到球体上的四个边所形成的面,以这两个面可以得到一个不规则的六面体,如图1-5。
如上,整个球体被切割成七个部分,包括一个规则的六面体和六个不规则六面体,如图1-6,为球体的一部分。
第四步,开始体网格划分,图1-7为规则的六面体的网格,图1-8为不规则六面体的网格。
如图1-9,我们完成了球体的六面体网格。
三角网格模型顶点法矢与离散曲率计算_神会存

"
概述
三 角 网 格 模 型 是 #$%&#$’ 系 统 中 一 种 广 泛 使 用 的 离 散
此基础上对 ./0123 离散曲率计算方法做了改进 " 采用 质 心 距 离权 重 代 替 面 积 权 重 " 给 出 了 离 散 曲 率 的 计 算 方 法 " 并 结 合 实 例比较了改进前后两种方法的计算误差 !
$南京航空航天大学 " 南京 )"BB"!%
摘
要
给出了一种新的面积角度加权的三角网格模型顶点法矢计算公式 " 在此基础上对 ./0123 离散曲率计算方法做
了改进 " 采用质心距离权重代替面积权重 " 提出了新的离散曲率计算方法 ! 实例表明 " 与原有公式及方法相比 " 该公式与 方法的计算结果更为准确 ! 关键词
(( ((
)*
-’’
(
( ( (
图"
顶点
&’ 的一领域
")
!""#$!! 计算机工程与应用
组成的集合记为 +&$ 若顶点 !"",&# 则 !" 是 !& 的相邻点 $ ,& 中的 顶点个数记为 ),&) $ 包含 !& 的三角片集合记为 - &$ 若三角片 .’"
邻域中的顶点 !"",& 在该切平面上的投影记为 !" #如图 & 所示 $
11
&
1’
1& 0
, 9 !
, 9 ! , 9 ! , 9 !
&
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
创建一个实心球半径为 20:
菜单路径: Main > Proprecessor > Modeling > Volumes > Sphere > Solid Sphere > 输入球半径 > OK
创建一个实心球半径为 20:
点击 OK 后生成一个实心球:
定义单元类型
菜单路径:Main Menu > Proprecessor > Element Type > Add/Edit/Delete > 在弹出对话框中点料属性对话框:
定义单元类型
• 然后点击上面菜单中的 Material > Exit 或右上角的 叉号 结束材料定义。
定义单元类型
下面,点击菜单项: Main Menu > Proprecessor > Meshing > MeshTool 打开网格划分工具
定义单元类型
定义单元类型
弹出单元类型库对话框如下:
定义单元类型
在其中,选择 > Shell > Elastic 4node 63,然后 OK,回 到 单元类型 对话框:
定义单元类型
点击 Close 关闭单元类型对话框,再随意定义一种材料: Main Menu > Proprecessot > Material Props > Material Models > 弹出定义材料属性对话框 > 点击材 料 1 > 在右边查看中,点击 Structural > Linear > Elastic > Isotrpic > 在材料性能输入窗口中输入相应的材 料属性:
在 MeshTool 中,设置网格参数如下: 激活 Smart Size 选项,移动滚动条,使 其下方显示的值为 4;在 Mesh 区,选 择划分网格的实体为 Areas,Shape 为 Tri (三角形);方式为 Free (自由网格划 分)。然后点击 Mesh 按钮:
定义单元类型
弹出拾取实体对话框,在其中点击 Pick All,对整个球的外 表面划分网格,结果如下:
定义单元类型
如果希望改变网格的密度,可以 Clear 这些面网格,调整 MeshTool 中 Smart Size 的值,重新划分网格。比如, 当 Smart Size 为 2 时,划分网格结果如下,网格质量有 明显改进,但仍然是平面的三角形:
定义单元类型
不过,shell63 壳体单元是一种线性单元,即一种平面板壳 单元。如果想划分曲面单元,可以将单元类型改为有边中 间节点的 shell281。当 Smart Size 为 4 时,相应的网格 如下: