人工神经网络及其应用实例
神经网络的实际应用举例

神经网络的实际应用举例神经网络是模拟人类神经系统机制的计算模型。
它可以从大量数据中自主学习,分析和识别复杂的模式,被应用到许多领域,包括计算机视觉、语音识别、自然语言处理等。
下面介绍神经网络在实际应用中的几个典型案例:一、机器翻译机器翻译是指将一种语言的文本转换成另一种语言的文本。
以Google Translate为例,通过神经网络,将大量的双语数据进行学习和模型的训练,实现了高质量的机器翻译。
神经网络通过提取出源语言文本中的特征,转换成语义空间的向量,在目标语言中寻找最相似的向量,并根据这些向量生成目标语句。
同时,还可以实现实时的语音翻译功能。
二、人脸识别人脸识别技术在安全监控、智能家居等领域广泛使用。
以人脸识别门禁为例,首先通过摄像头捕捉到人脸图像,然后提取特征,将人脸图像转换成向量。
接着,将向量输入神经网络,通过模型识别出人脸的身份信息,最后与数据库中保存的人脸信息进行比对,从而判断身份是否匹配。
三、自动驾驶自动驾驶技术是当前人工智能技术最具代表性的一个领域。
以谷歌无人驾驶汽车为例,通过激光雷达、相机、雷达和GPS等传感器收集周围环境信息,并通过神经网络进行深度学习,实现对环境信息的感知和处理。
然后,结合交通规则和路况等条件,进行行驶决策,开展自主驾驶。
四、医疗影像分析医疗影像分析需要对大量医学图像进行处理和分析,如CT、MRI等。
因此,对于快速准确地分析疾病信息非常重要。
以肺癌识别为例,通过神经网络可以对肺部影像进行分割和预处理,提取肺结节的特征,进而诊断是否为恶性肿瘤。
综上,神经网络的实际应用非常广泛,除了上面所提到的应用领域外,还可以应用在音视频处理、推荐系统等领域,为我们带来越来越多的便捷和效率。
综述人工神经网络在地基沉降预测中的应用

综述人工神经网络在地基沉降预测中的应用摘要:人工神经网络在近几年来发展迅速,在岩土工程界得到了广泛的应用,尤其在地基沉降预测方面取得了突出了成绩,本文将结合现有的一些工程实例来简单地综述一下人工神经网络在地基沉降预测方面的优越性。
关键词:人工神经网络地基沉降随着我国经济的发展,高速公路,高层建筑等作为基础建设的一部分,也得到了迅猛地发展。
这些基础建设中最首要的任务就是地基处理,因此对地基沉降预测就成了工程建设者需要解决的首要问题之一。
目前,对地基沉降预测的方法很多,除了传统的计算方法以外,还有可靠度分析法、沉降差法、FLAC有限差分法等。
近几年,随着人工神经网络方法在岩土工程界的应用,利用人工神经网络方法来预测地基的沉降已取得的比较显著的成绩,本文将结合前人的一些工程实例来综述人工神经网络在地基沉降预测中的优越性。
1人工神经网络的简介人工神经网络(Artificial Neural Network,简称ANN)[1]是集多种现代科学技术为一体的一门新兴实用科学技术。
神经网络反映了人脑功能的基本特性,是人脑的抽象、简化,模拟它的信息处理是由神经元之间的相互作用来实现的;知识与信息的存储表现为网络元件互连间分布式的物理联系;学习和识别取决于各神经元连接权值的动态变化过程。
人工神经网络正是在人类对其大脑神经网络认识理解的基础上人工构造的能够实瑰某种功能的神经网络。
它是理论化的人脑神经网络的数学模型,是基于模仿大脑神经网络结构和功能而建立的一种信息处理系统。
它实际上是由大量简单元件相互连接而成的复杂网络,具有高度的非线性,能够进行复杂的逻辑操作和非线性关系实现的系统。
2BP建模的基本思路2.1 BP神经网络原理[2]BP神经网络(Error Back – Propagation,简称EBP或BP神经网络模型)是一种具有三层或三层以上阶层结构的、采用多层前馈神经网络的误差逆传模型。
层间各神经元实现全连接,即下层的每一个单元与上层的每个单元都实现权连接,而每层神经元之间不连接。
人工神经网络应用实例
人工神经网络在蕨类植物生长中的应用摘要:人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。
为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。
根据此特点结合蕨类植物的生长过程进行了蕨类植物生长的模拟。
结果表明,人工神经网络的模拟结果是完全符合蕨类植物的生长的,可有效的应用于蕨类植物的生长预测。
关键词:人工神经网络;蕨类植物;MATLAB应用一人工神经网络的基本特征1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。
这特别适于实时控制和动态控制。
各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。
2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。
只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。
因此人工神经网络是一种具有高度非线性的超大规模连续时间动力学系统。
3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。
作为神经元间连接键的突触,既是信号转换站,又是信息存储器。
每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。
信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。
4、具有联想存储功能:人的大脑是具有联想功能的。
比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。
用人工神经网络的反馈网络就可以实现这种联想。
神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。
在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。
5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。
神经网络专题ppt课件
(4)Connections Science
(5)Neurocomputing
(6)Neural Computation
(7)International Journal of Neural Systems
7
3.2 神经元与网络结构
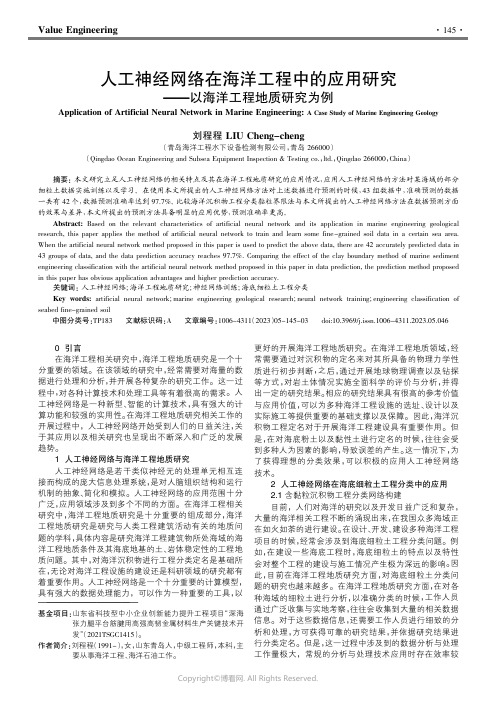
人脑大约由1012个神经元组成,而其中的每个神经元又与约102~ 104个其他神经元相连接,如此构成一个庞大而复杂的神经元网络。 神经元是大脑处理信息的基本单元,它的结构如图所示。它是以细胞 体为主体,由许多向周围延伸的不规则树枝状纤维构成的神经细胞, 其形状很像一棵枯树的枝干。它主要由细胞体、树突、轴突和突触 (Synapse,又称神经键)组成。
15
4.互连网络
互连网络有局部互连和全互连 两种。 全互连网络中的每个神经元都 与其他神经元相连。 局部互连是指互连只是局部的, 有些神经元之间没有连接关系。 Hopfield 网 络 和 Boltzmann 机 属于互连网络的类型。
16
人工神经网络的学习
学习方法就是网络连接权的调整方法。 人工神经网络连接权的确定通常有两种方法:
4
5. 20世纪70年代 代表人物有Amari, Anderson, Fukushima, Grossberg, Kohonen
经过一段时间的沉寂后,研究继续进行
▪ 1972年,芬兰的T.Kohonen提出了一个与感知机等神经 网络不同的自组织映射理论(SOM)。 ▪ 1975年,福岛提出了一个自组织识别神经网络模型。 ▪ 1976年C.V.Malsburg et al发表了“地形图”的自形成
6
关于神经网络的国际交流
第一届神经网络国际会议于1987年6月21至24日在美国加州圣地亚哥 召开,标志着神经网络研究在世界范围内已形成了新的热点。
人工神经网络及其应用[PPT课件]
![人工神经网络及其应用[PPT课件]](https://img.taocdn.com/s3/m/e46730ee59eef8c75fbfb3f3.png)
➢人工神经网络是从微观构造与功能上对人脑神经系 统的模拟而建立起来的一类模型,具有模拟人的局部 形象思维的能力。其特点主要是具有非线性、学习能 力和自适应性,是模拟人的智能的一条重要途径。
Ep (t)
dp yp (t) 2
1 2 [d p
yp (t)]2
1 2
e2p
(t)
J (t)
〔4〕δ规那么:
1 2
[dp
p
yp (t)]2
1 2
e2 p p
(t)
用于权值调整的自适应学习算法为
将代入上式可得j(t 1 )j(t) /E p uj( ( pt t) )2j(t)e p (t)u jp
wij uiuj
❖这一规那么与〞条件反射“学说一致,并已得到神经细胞 学说的证实。α是表示学习速率的比例常数。
2.4 神经网络的互联模式
根据连接方式的不同,神经网络的神经元之间的连接有如 下几种形式。
1〕前向网络
前向网络构造如以下图。神经元分层排列,分别组成输入 层、中间层〔也称为隐含层,可以由假设干层组成〕和输 出层。每一层的神经元只承受来自前一层神经元的输入, 后面的层对前面的层没有信号反响。输入模式经过各层次 的顺序传播,最后在输出层上得到输出。感知器网络和BP 网络均属于前向网络。
1〕有监视学习:对于监视学习,网络训练往往要基于一定数 量的训练样本。训练样本通常由输入矢量和目标矢量组成。在 学习和训练过程中,网络根据实际输出与期望输出的比较,进 展连接权值和域值的调节。通过将期望输出成为导师信号,它 是评价学习的标准。最典型的有监视学习算法是BP算法,即误 差反向传播算法。
人工神经网络实验报告

人工神经网络实验报告
本实验旨在探索人工神经网络在模式识别和分类任务中的应用效果。
实验设置包括构建神经网络模型、数据预处理、训练网络以及评估网
络性能等步骤。
首先,我们选择了一个经典的手写数字识别任务作为实验对象。
该
数据集包含了大量手写数字的灰度图片,我们的目标是通过构建人工
神经网络模型来实现对这些数字的自动识别。
数据预处理阶段包括了对输入特征的标准化处理、数据集的划分以
及对标签的独热编码等操作。
通过对原始数据进行预处理,可以更好
地训练神经网络模型,提高模型的泛化能力。
接着,我们构建了一个多层感知机神经网络模型,包括输入层、隐
藏层和输出层。
通过选择合适的激活函数、损失函数以及优化算法,
我们逐步训练网络,并不断调整模型参数,使得模型在训练集上达到
较高的准确率。
在模型训练完成后,我们对网络性能进行了评估。
通过在测试集上
进行预测,计算模型的准确率、精确率、召回率以及F1-score等指标,来全面评估人工神经网络在手写数字识别任务上的表现。
实验结果表明,我们构建的人工神经网络模型在手写数字识别任务
中表现出色,准确率高达95%以上,具有较高的识别准确性和泛化能力。
这进一步验证了人工神经网络在模式识别任务中的强大潜力,展
示了其在实际应用中的广阔前景。
总之,本次实验通过人工神经网络的构建和训练,成功实现了对手写数字的自动识别,为人工智能技术在图像识别领域的应用提供了有力支持。
希望通过本实验的研究,可以进一步推动人工神经网络技术的发展,为实现人工智能的智能化应用做出更大的贡献。
人工神经网络的基本原理和应用

人工神经网络的基本原理和应用概述人工神经网络是一种受到人脑神经元启发的计算模型。
它由许多高度互连的处理单元(神经元)组成,这些神经元之间通过连接强度(权值)相互通信。
人工神经网络能够通过学习和训练,自动调整权值和拓扑结构,从而实现某种特定任务。
基本原理人工神经网络的基本原理是模拟生物神经元的工作方式。
每个神经元接收一组输入信号,并根据这些输入信号的权值和激活函数的输出,产生一个输出信号。
这个输出信号又可以作为其他神经元的输入信号,从而实现信息的传递和处理。
人工神经网络通常由多层神经元组成,包括输入层、隐藏层和输出层。
输入层接收外部输入信号,隐藏层和输出层对输入信号进行处理和转换。
隐藏层和输出层之间的连接强度(权值)通过训练过程进行学习和调整,以实现预期的输出结果。
应用领域人工神经网络在各个领域都有广泛的应用,包括但不限于以下几个方面:1.图像识别–人工神经网络可用于图像识别任务,如人脸识别、物体识别等。
通过训练大量图像数据,神经网络可以学习到图像中的特征,并通过对输入图像进行处理,达到准确分类和识别的目的。
2.自然语言处理–人工神经网络在自然语言处理方面也有着广泛的应用。
它可以用于语音识别、情感分析、机器翻译等任务。
通过训练大量文本数据,神经网络可以学习到单词和语义之间的关联,从而实现对自然语言的理解和处理。
3.预测和分类–人工神经网络可以通过训练历史数据,对未来事件进行预测。
例如,它可以用于股票市场预测、天气预报等领域。
此外,神经网络还可用于数据分类,如垃圾邮件过滤、疾病诊断等任务。
4.控制与优化–人工神经网络在控制与优化领域也有着广泛应用。
它可以用于自动驾驶车辆、工业生产优化、智能电网调度等控制系统中,通过学习和训练,实现自动控制和优化的目标。
优势与挑战人工神经网络相比传统的算法有一些明显的优势,但同时也面临一些挑战。
优势•并行处理能力:神经网络的并行处理能力可以加快训练和推理的速度。
•自适应学习:神经网络可以通过训练和反馈机制,自动学习和调整权值,适应输入数据的变化。
210878164_人工神经网络在海洋工程中的应用研究
Value Engineering0引言在海洋工程相关研究中,海洋工程地质研究是一个十分重要的领域。
在该领域的研究中,经常需要对海量的数据进行处理和分析,并开展各种复杂的研究工作。
这一过程中,对各种计算技术和处理工具等有着很高的需求。
人工神经网络是一种新型、智能的计算技术,具有强大的计算功能和较强的实用性。
在海洋工程地质研究相关工作的开展过程中,人工神经网络开始受到人们的日益关注,关于其应用以及相关研究也呈现出不断深入和广泛的发展趋势。
1人工神经网络与海洋工程地质研究人工神经网络是若干类似神经元的处理单元相互连接而构成的庞大信息处理系统,是对人脑组织结构和运行机制的抽象、简化和模拟。
人工神经网络的应用范围十分广泛,应用领域涉及到多个不同的方面。
在海洋工程相关研究中,海洋工程地质研究是十分重要的组成部分,海洋工程地质研究是研究与人类工程建筑活动有关的地质问题的学科,具体内容是研究海洋工程建筑物所处海域的海洋工程地质条件及其海底地基的土、岩体稳定性的工程地质问题。
其中,对海洋沉积物进行工程分类定名是基础所在,无论对海洋工程设施的建设还是科研领域的研究都有着重要作用。
人工神经网络是一个十分重要的计算模型,具有强大的数据处理能力,可以作为一种重要的工具,以更好的开展海洋工程地质研究。
在海洋工程地质领域,经常需要通过对沉积物的定名来对其所具备的物理力学性质进行初步判断,之后,通过开展地球物理调查以及钻探等方式,对岩土体情况实施全面科学的评价与分析,并得出一定的研究结果。
相应的研究结果具有很高的参考价值与应用价值,可以为多种海洋工程设施的选址、设计以及实际施工等提供重要的基础支撑以及保障。
因此,海洋沉积物工程定名对于开展海洋工程建设具有重要作用。
但是,在对海底粉土以及黏性土进行定名的时候,往往会受到多种人为因素的影响,导致误差的产生。
这一情况下,为了获得理想的分类效果,可以积极的应用人工神经网络技术。
2人工神经网络在海底细粒土工程分类中的应用2.1含黏粒沉积物工程分类网络构建目前,人们对海洋的研究以及开发日益广泛和复杂,大量的海洋相关工程不断的涌现出来,在我国众多海域正在如火如荼的进行建设。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学习率 决定了沿梯度方向的移动速度,以确定新的权值。大的
值会加快权值的改变,小的 值则减缓了权值的改变。第 i 次迭代
后的新权值可表示为:
wi 1 wi E bi 1 bi E eu x (1 e u ) 2
eu (1 e u ) 2
上图中, 左侧为输入层 (输入层的神经元个数由输入的维度决定) , 右侧为输出层(输出层的神经元个数由输出的维度决定) ,输入层与 输出层之间即为隐层。 输入层节点上的神经元接收外部环境的输入模式, 并由它传递给 相连隐层上的各个神经元。隐层是神经元网络的内部处理层,这些神 经元在网络内部构成中间层,不直接与外部输入、输出打交道。人工 神经网络所具有的模式变换能力主要体现在隐层的神经元上。 输出层 用于产生神经网络的输出模式。 多层神经网络结构中有代表性的有前向网络(BP 网络)模型、
1, x 0 ,便于理论分析及阈值逻辑器件 1, x 0
实现,也是当前研究的主要元件之一。
2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6
-4
-2
0
2
4
6
Page 2 of 25
每一神经元有许多输入、输出键,各神经元之间以连接键(又称 突触)相连,它决定神经元之间的连接强度(突触强度)和性质(兴 奋或抑制) , 即决定神经元间相互作用的强弱和正负, 共有三种类型: 兴奋型连接、 抑制型连接、 无连接。 这样,N 个神经元 (一般 N 很大) 构成一个相互影响的复杂网络系统,通过调整网络参数,可使人工神 经网络具有所需要的特定功能,即学习、训练或自组织过程。一个简 单的人工神经网络结构图如下所示:
eui (t z ) bi x j , i 1, 2, a ji (1 eui )2
,m
, m, j 0,1, 2,
,n
研究表明,两层网络在其隐层中使用 S 形激励函数,在输出层中 使用线性传输函数,就几乎可以以任意精度逼近任意感兴趣的函数, 只要隐层中有足够的单元可用。 问题 1: 试使用 BP 神经网络去逼近正弦函数的正半周,如下:
Page 3 of 25
多层侧抑制神经网络模型和带有反馈的多层神经网络模型等。 本文主 要探讨前向网络模型。 多层前向神经网络不具有侧抑制和反馈的连接方式, 即不具有本 层之间或指向前一层的连接弧,只有指向下一层的连接弧。代表是 BP 神经网络:输入模式由输入层进入网络,经中间各隐层的顺序变 换,最后由输出层产生一个输出模式,如下图所示:
k ji
为加快寻找最优权值的速度,可以使用动量法。之前的方法中, 收敛到最优权值的速度取决于学习率的大小, 但是过大的学习率会导 致来回震荡,不能稳定到最优权值点。动量法的引入,使得较大的学 习率也可以具有较好的稳定性, 即提供了在学习期间到达最优权值时
Page 10 of 25
的稳定性。 这种方法基本上是将过去权值变化的平均值附加到每一次 权值变化的新权值增量,从而使网络权值的变化更平滑。数学表示如 下:
如果将偏差输入 b 视为输入 x 的一部分,令 x0 1, w0 b ,可以得到 对于多输入神经元的权值修正式:
wij1 wij E eu x j , j 0,1, 2, (1 eu )2 ,n
总之,利用 delta 规则的有监督的学习可以按如下方法来实现: 一个输入模式( x0 , x1 , x2 , , xn )通过连接被传递,它的初始权值被设置 为任意值。对加权的输入求和,产生输出 y ,然后 y 与给定的目标输 出 t 做比较决定此模式的平方误差 。输入和目标输出不断地被提出, 在每一次迭代或每一个训练时间后利用 delta 规则进行权值调整直到 得到可能的最小平方误差。 delta 规则在每一步中通过导数寻找在误差平面中某个特定点局 部区域的斜率,它总是应用这个斜率从而试图减小局部误差,因此, delta 规则不能区分误差空间中的全局最小点和局部最小点,它本身 不能克服单层神经网络的局限,无法直接应用到多层神经网络(易陷 入局部最小点) ,但它的一般形式是多层神经网络中的学习算法—— 反传算法的核心。 在多层前向神经网络的训练过程中, 误差导数或关于权值的误差
y L(u ) 1 1 eu
函数曲线如下图所示:
1
0.8
0.6
0.4
0.2
0
-0.2 -10
-8
-6
-4
-2
0
2
4
6
8
10
对于有限输入量, 对数函数输出范围为 y (0,1) 。 在输入为 u 0 时, 输出值为中间值 y 0.5 。输出在 u 0 附近随着输入的增加以相对快的
网络参数修正方程为:
bik 1 bik
k 1 ji
bik (t z ) yi , i 0,1, 2 bi
a
eui k a a ji (t z ) bi x j , i 1, 2, j 0,1 a ji (1 eui )2
wk 1 wk (1 ) ( ) w
式中, 是一个在 0 和 1 之间的动量参数, wk 是在前一个训练 时间里的权值变化。使用动量法的实际效果是:基本上,如果以前积 累的变化与之前方向所暗示的是同一个方向时, 动量部分就会加速当 前权值改变;如果当前积累的变化是相反的方向,动量将阻止当前的 变化。 据此编写 MATLAB 程序,源代码如下:
该神经元具有一个输入 x ,权重为 w ,偏差输入为 b ,目标输出 为 t ,预报输出为 y 。则预报误差为:
E t y t 1 1 t u 1 e 1 e wx b
为消除当误差在整个输入模式上求和时引起的误差符号问题, 在 delta 规则里使用的误差指示是平方误差,定义为:
t sin( x), x [0, ]
由于输入量 x 仅有一维,故 BP 神经网络结构可以设计为:
Page 9 of 25
x0 1
a01
y1 b1
y0 1
a02
b0
a11 a12
x1 x
1
z
b2
y2
各个神经元的输入输出关系为:
yi
1 1 , u a ji x j , i 1, 2 i 1 eui j 0 2
人工神经网络及其应用实例
人工神经网络是在现代神经科学研究成果基础上提出的一种抽 象数学模型,它以某种简化、抽象和模拟的方式,反映了大脑功能的 若干基本特征,但并非其逼真的描写。 人工神经网络可概括定义为: 由大量简单元件广泛互连而成的复 杂网络系统。所谓简单元件,即人工神经元,是指它可用电子元件、 光学元件等模拟,仅起简单的输入输出变换 y ( x) 的作用。下图是 3 中常用的元件类型: 线性元件: y 0.3x ,可用线性代数法分析,但是功能有限,现在 已不太常用。
根据 delta 原则,权值改变应与误差梯度的负值成比例,引入学 习率 ,每次迭代中的权值改变可表示为:
eu w E x w (1 e u ) 2 eu b E b (1 e u ) 2
Page 6 of 25
输入层
隐层
输出层
多层前向神经网络由隐层神经元的非线性处理衍生它的能力, 这 个任务的关键在于将神经元的加权输入非线性转换成一个输出的非 线性激励函数。下图给出了一个接收 n 个输入 x1 , x2 , , xn 的神经元:
b
x1 x2
w1 w2 wn
1
y
xn
Page 4 of 25
神经元的输出由下式给出:
y ( w j x j b)
j 1 n
这里输入的加权和(括号内部分)由一个非线性函数传递, b 表 示与偏差输入相关的权值, w j 表示与第 j 个输入相关的权值。 使用最广泛的函数是 S 形函数, 其曲线家族包括对数函数和双曲 正切函数,这些都可用来对人口动态系统、经济学系统等建模。另外 所用的其他函数有高斯函数、正弦函数、反正切函数,在此不一一展 开介绍,本文主要使用的激励函数是对数函数,函数表达式为:
2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6
-4
-2
0
2
4
6
连续型非线性元件: y tanh( x) ,便于解析性计算及器件模拟,是 当前研究的主要元件之一。
Page 1 of 25
2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6
-4
-2
0
2
4
6
离散型非线性元件: y
beta = 0.1; miu = 0.8; for i = 1 : 1 : 101; x1(1, i) = (i - 1) * pi / 100; t(1, i) = sin(x1(1, i)); end x0 = 1; y0 = 1; a01 = rand(); a02 = rand(); a11 = rand(); a12 = rand(); b0 = rand(); b1 = rand(); b2 = rand(); delta_a01 = 0; delta_a02 = 0; delta_a11 = 0; delta_a12 = 0; delta_b0 = 0; delta_b1 = 0; delta_b2 = 0; k = 1; total_error = 0;
z v, v bi yi
i 0
根据之前的推导,平方误差 对所有网络参数的导数为:
(t z ) yi , i 0,1, 2 bi
eui (t z ) bi x j , i 1, 2, j 0,1 a ji (1 (t z )2