基于极点配置的控制器设计与仿真
基于极点配置的逆变电源重复控制器设计

基于极点配置的逆变电源重复控制器设计为改善逆变器动态特性和稳态性能,文章设计了极点配置和重复控制串联的控制器方案。
控制系统引入状态反馈和极点配置,采用重复控制器进行电压修正和补偿。
实验证明该设计提高了逆变器动态性能且能够获得更高精度的稳态输出波形。
标签:逆变器;重复控制;极点配置引言由于逆变器状态变量变化快且动态特性差,寻找一种既能保证稳态精度和快速实现的瞬时控制方案比较困难[1]。
将瞬时值控制结合重复控制,瞬时值控制主要用于改善逆变器动态特性;重复控制则专门用于获得稳态输出。
二者的结合和补充大大简化了控制器设计,且全面提升了系统的动静态性能。
1 逆变器重复控制策略重复控制系统示意图如图1所示,其中y为逆变器电压输出,r为参考正弦输入,d为等效的周期性干扰信号,e为误差信号,z-N为周期延迟环节,N为采样次数,P(z)为控制对象,C(z)为补偿器,其中阴影表示重复信号发生器的内模[2]。
图1 重复控制系统的示意图控制对象是单相半桥逆变器。
由于输出基波频率和滤波器的截至频率远小于逆变器的开关频率,故逆变器的动态特性基本取决于输出滤波器[3]。
实验装置单相半桥逆变电源构成如下:直流输入电压250V;滤波电容20uF;滤波电感1.1mH;采样频率10KHz;开关频率10KHz;死区时间2微秒;交流电压输出峰值100V,输出电压基波频率为50Hz。
连续域逆变器传递函数为[4]:在10kHz采样频率下将(1)用零阶保持器法离散因此可知一个周期采样的次数N=200,Q(z)取0.95,故周期延迟环节z-N=z-200。
2 重复控制与极点配置相结合控制逆变电源动态特性较差,是由于逆变器自身的阻尼较弱,即其两个极点太接近s域的虚轴或z域的单位圆[5]。
而为增加逆变器的阻尼可以引入状态反馈,进行极点配置。
仅通过状态反馈极点配置达到较高的稳态指标相对困难,增加重复控制可以解决此问题[6]。
首先配置状态反馈极点来改造逆变器的极点,改善其在指令跟踪和负载突变时的动态响应特性[7];之后重复控制器采样计算极点配置控制系统的电压偏差值,据此渐次调整后者的电压信号提高基波幅值的输出精度和补偿波形畸变[8]。
基于极点配置的吊车抗摆系统研究仿真

一、课程设计任务书1、设计实验条件实验设备:PC 机2、设计任务已知某吊车控制系统的开环传递函数为()()21432ls gG s Mls ls M m gs gsμμ+=++++其中模型的参数,M=5kg ,m=10kg ,l=1m ,g=9.8m/s, 0.2μ=,采用极点配置方法,设计状态反馈控制器。
设计要求:建立状态空间表达式,设计状态控制器,并用Matlab 仿真给出输入输出曲线。
3、设计说明书的内容1、 设计题目与设计任务(设计任务书)2、 前言(绪论)(设计的目的、意义等)3、 主体设计部分4、 结束语5、 参考文献4、设计时间与设计时间安排1、设计时间: 2周2、设计时间安排:熟悉实验设备、实验、收集资料:3 天 设计计算、绘制技术图纸: 6 天 编写课程设计说明书: 2 天 答辩:1 天二、前言1、研究背景在港口向货船船仓堆放集装箱时,需要集装箱准确就位。
但由于吊运集装箱的吊车吊臂的运动及阵风等扰动会造成集装箱不断地摆动。
为减小摆动,须减慢吊臂的运动速度或等待货物的摆动差不多完全衰减后,再使集装箱就位。
这种消极地减小摆动的方法是以降低工作效率为代价的。
在冶金浇铸车间吊运金属熔液的吊车、吊装大型设备的现场等都有类似的问题存在。
吊运的重物摆动不仅会降低工作效率,而且不利于安全生产。
吊车作为一种重要的起重运输机械,在工业生产中得到了广泛的应用。
对于吊车的控制,往往要求对控制精度、速度以及抗摆等方面进行综合考虑。
台车水平方向上的移动直接受电机的控制,因此台车移动的速度和精度控制是较易实现的。
相对而言,吊车系统的抗摆控制往往难于实现。
负载的摆动主要是由于加速、减速以及外界干扰而引起的,抗摆控制对于吊车运行的安全性往往是至关重要的。
在很多文献中已提出了开环、闭环方法使得单输入单输出系统稳定。
因此本文利用线性系统状态反馈的极点配置法使闭环系统的极点位于左半平面,实现对单输出系统的稳定控制。
2、国内外研究现状国内吊车抗摆技术的研究开始于80年代初,较早研究的学者是哈尔滨工程大学的华克强等人,在华克强的文献《桥式吊车模糊防摆控制》中,作者针对桥式吊车,给出了吊车系统精确的数学模型,根据此模型,设计了最优控制器,自适应控制器,模糊控制器,并对三种控制器进行了比较分析。
基于多项式极点配置的ASVG数字控制器设计

V G主要是无功 电流控制 , 设计电流内环控制器为二 自由度控制器 , 直接从时域性能指标人手建立 闭环特 征方程用多项式法进行极点配置 , 对指令 电流和扰动
的工作性能是非常有意义的。针对提高 A V S G的控制
性能, 已有很 多方 法被 提 出 , 工程 上最 常用 的是基 于 电
() 2
3s I d 2C
1 £
0 1
L
-
O
0
0
扰动 , 加人前 馈补偿 即可 , 可把 电流状 态反馈 作 为扰动
量处理 , 通过设计具有较强抗扰性能的电流S 为 S,bS 经坐标变换得到的 d q S ,。 a 、。 S — 坐标系下的开关矢量。 因为参考轴与空 间矢量同步旋转 , 故电网电压的 d q轴分量和稳定工作状态的 A V — S G的 d q 电流 、轴
图 1 AV S G主电路
示 J分析 式 ( ) 以认 为 A V , 3可 S G输 出 电 压矢 量 由三
部分组成 , 一是 电网电压扰动, 二是 电流状态反馈 部
分, 三是 电流控制 器输 出所控 制部分 。
一
扣
up
,
c
)s 一 (
) u
fd q+rLl I l do a i d一 d r Ⅱr q= q
Ab t a t A ii lcnrl rd s nmeh d fr VG b sdo oy o a oealc t n7spo oe . h to s r c : dgt o t l ei to o a oe g AS ae n p ln mil l o ai i rp sd T emeh di a p l o s
基于极点配置
辽宁工业大学开放性实验报告题目:基于极点配置法的直流调速系统设计与仿真院(系):电气工程学院专业:自动化111班学生姓名:指导教师:(签字)辽宁工业大学课程设计说明书(论文)起止时间:2015.3.30~2015.3.31开放性实验报告院(系):电气工程学院教研室:自动化实验项目基于极点配置法的直流调速系统设计与仿真所在单位电气学院自动化教研室实验类型□科学研究√自拟课题√综合设计□计算机应用□其它指导教师王立红实验时数16学时招收对象11级自动化专业学生招收人数6人项目研究目的 1.掌握状态反馈及极点配置的原理。
2.掌握直流调速系统的分析与设计方法。
3.熟悉直流调速系统的硬件电路设计、联机调试等设计过程,提高学生设计系统的实践技能。
控制系统的参数和控制要求1.电动机:额定数据为10kW,220V,55A,1000r/min,电枢电阻Ra=0.5Ω。
飞轮矩GD2=10Nm2。
2.晶闸管装置:三相桥式可控整流电路,整流变压器二次线电压E2l=230V,触发整流环节的放大系数sk=44。
3.V-M系统主回路总电阻R=1.0Ω。
4.测速发电机:永磁式,额定数据为23.1W,110V,0.21A,1900r/min。
5.控制要求:系统稳定,超调量%5≤σ,调节时间sts5.0≤。
实验设计内容1.绘制单闭环直流调速系统的原理图,根据原理图建立系统的动态结构图并求出闭环传递函数。
2.由传递函数建立系统的状态空间表达式。
3.根据系统要求的技术指标选择期望的闭环极点,设计状态反馈矩阵。
4.测试系统极点配置前的单位阶跃响应。
5.测试系统极点配置后的单位阶跃响应,验证设计的正确性。
目录第1章绪论 (3)第2章数学模型的建立 (4)2.1 传递函数的求得过程 (4)2.2 状态空间表达式的建立 (8)第3章极点配置 (10)第4章仿真实验 (12)第5章总结 (14)第1章绪论20世纪50年代后期,控制理论由经典控制理论向现代控制理论转变,现代控制理论是在引入状态空间概念的基础上发展起来的。
基于极点配置算法的火电机组高加水位控制系统的仿真研究
基于极点配置算法的火电机组高加水位控制系统的仿真研究摘要火电机组的高加水位控制是保证机组运行安全和稳定的重要措施之一、本文基于极点配置算法,对火电机组的高加水位控制系统进行了仿真研究。
首先,介绍了火电机组高加水位控制系统的工作原理和目标。
然后,详细介绍了极点配置算法的理论基础和应用。
接着,建立了火电机组高加水位控制系统的数学模型,并通过仿真实验验证了极点配置算法的有效性。
最后,对实验结果进行了分析和讨论,得出了一些结论。
关键词:火电机组、高加水位控制、极点配置算法、仿真研究1.引言火电机组是我国电力系统中最重要的发电方式之一,其高加水位控制是保证机组运行安全和稳定的关键环节。
高加水位控制系统的主要任务是根据负荷需求和发电机的运行状态,自动调节机组的水位,使机组能够稳定运行。
因此,研究和优化高加水位控制系统对于提高火电机组的运行效率和安全性具有重要意义。
2.火电机组高加水位控制系统的工作原理3.极点配置算法的理论基础和应用极点配置算法是一种经典的控制算法,其基本思想是通过调节系统的极点位置,来改变系统的动态响应特性。
具体来说,极点配置算法通过对系统开环传递函数进行单极点或多极点的裕度设计,使系统的闭环传递函数满足指定的要求。
极点配置算法在控制系统设计中有着广泛的应用,能够实现对系统的快速响应、稳定性和抗干扰能力等方面的优化。
4.火电机组高加水位控制系统的数学模型火电机组高加水位控制系统的数学模型可以用以下传递函数表示:G(s)=K/(Ts+1)其中,G(s)为系统的传递函数,K为传递函数的增益,T为传递函数的时间常数,s为Laplace变换中的复变量。
根据系统的实际情况,可以选择合适的参数来描述机组的动态特性。
5.仿真实验和结果分析本文使用MATLAB/Simulink软件对火电机组高加水位控制系统进行了仿真实验。
实验中,选择了适当的系统参数来建立数学模型,并将极点配置算法应用于系统控制中。
通过仿真实验,得到了系统在不同工况下的动态响应曲线。
基于极点配置的PID控制器的设计开题报告
姓名杨峰清专业自动化班级一班学号08220116 指导教师裴喜平题目类型理论研究题目基于极点配置的逆变器模拟控制器研究一、选题背景及依据(简述题目的技术背景和设计依据,说明选题目的、意义,列出主要参考文献)1、逆变电源由于良好的性能在国民经济的各个领域中得到了极其广泛的应用,随着工业装置对电源性能越来越高的要求,通过改进控制方法是提高技术指标的一种重要手段,本设计就是探讨改进控制策略,从而提高性能指标。
逆变器作为不间断电源的核心部分,广泛用于通信、金融等领域。
一个高性能的逆变器除了要满足体积、重量、电磁兼容等基本指标外,还需满足系统稳定,稳态电压精度高;总谐波畸变率(THD)含量小;动态响应快等要求。
重复控制可以校正逆变器在不同负载时输出电压的精度,具有很好的稳态输出特性,但由于其控制量输出有一个周期的延迟。
动态调节能力不足,而基于极点配置的电感电流内环电压外环反馈控制设计简单、鲁棒性好,但稳态控制精度不高。
因此,实际中常结合两者来协调校正输出波形。
在此提出基于极点配置的电感电流内环电压外环反馈控制方案,提高了逆变器的动态响应能力,然后增加控制调节输出电压的稳态精度,这一控制方案满足了逆变器的动静态特性、稳态精度,使用Matlab仿真验证了此方案的可行性。
2、逆变器也称逆变电源,是将直流电能转变成交流电能的变流装置,是太阳能、风力发电中一个重要部件。
随着微电子技术与电力电子技术的迅速发展,逆变技术也从通过直流电动机——交流电机的旋转方式逆变技术,发展到二十世纪六、七十年代的晶闸管逆变技术,而二十一世纪的逆变技术多数采用了MOSFET、IGBT、GTO、IGCT、MCT 等多种先进且易于控制的功率器件,控制电路也从模拟集成电路发展到单片机控制甚至采用数字信号处理器(DSP)控制。
各种现代控制理论如自适应控制、自学习控制、模糊逻辑控制、神经网络控制等先进控制理论和算法也大量应用于逆变领域。
其应用领域也达到了前所未有的广阔,从毫瓦级的液晶背光板逆变电路到百兆瓦级的高压直流输电换流站;从日常生活的变频空调、变频冰箱到航空领域的机载设备;从使用常规化石能源的火力发电设备到使用可再生能源发电的太阳能风力发电设备,都少不了逆变电源。
状态空间极点配置控制实验易杰
下面采用四种不同的方法计算反馈矩阵 K。 方法一:按极点配置步骤进行计算。
2) 计算特征值
ቤተ መጻሕፍቲ ባይዱ
因此有 系统的反馈增益矩阵为: 确定使状态方程变为可控标准型的变换矩阵 T: T = MW 式中:
其中“GL1IP State-Space”为直线一级倒立摆的状态空间 模型,双击打开如下窗口:
双击“Controller1”模块,打开状态反馈矩阵K 设置窗口:
把计算得到的 K 值输入上面的窗口。 运行仿真,得到以下结果:
图 4 直线一级倒立摆状态空间极点配置MATLAB Simulink 仿真结果
(进入MATLAB Simulink 实时控制工具箱“Googol Education Products”打开 “Inverted Pendulum\Linear Inverted Pendulum\Linear 1-Stage IP Experiment\ Poles Experiments”中的“Poles Control M File1”)
简约工作计划总结通用模版
单击此处添加副标题
状态空间极点配置控制实验课件 易杰
1、 状态空间分析 2、 极点配置及仿真仿真 3、 极点配置控制实验 4、 实验结果及实验报告
单击此处添加副标题
实验二 状态空间极点配置控制实验
1、状态空间分析
X = AX + Bu
对于控制系统
X 为状态向量( n 维) u 控制向量(纯量) n × n维常数矩阵 n ×1维常数矩阵
直线一级摆的极点配置及仿真.
内蒙古科技大学控制系统仿真课程设计说明书题目:直线一级摆的极点配置及仿真学生姓名:丛伟学号:0967112316专业:测控技术与仪器班级:测控09-3班指导教师:张勇为实现多输入、多输出、高度非线不稳定的倒立摆系统平衡稳定控制,将倒立摆系统的非线性模型进行近似线性化处理,获得系统在平衡点附近的线性化模型。
利用牛顿—欧拉方法建立直线型一级倒立摆系统的数学模型。
在分析的基础上,基于状态反馈控制中极点配置法对直线型倒立摆系统设计控制器。
由MATLAB 仿真表明采用的控制策略是有效的,设计的控制器对直线型一级倒立摆系统的平衡稳定性效果好,提高了系统的干扰能力。
关键词:倒立摆、极点配置、MATLAB仿真引言 (1)第一章 Matlab及Simulink简介 (2)1.1 Matlab简介 (2)1.2 Simulink简介 (2)第二章设计目的及要求 (4)第三章直线一阶倒立摆简介 (5)3.1 一阶倒立摆简介 (5)第四章数学模型的建立 (6)4.1 数学模型的建立 (6)4.1.1微分方程的数学模型 (6)4.1.2状态空间数学模型 (8)4.2 系统稳定性分析 (10)4.3 系统可控性分析 (11)第五章状态空间极点配置 (13)5.1 状态空间分析 (13)5.2 状态空间极点配置 (14)第六章仿真验证 (18)6.1 Simulink仿真程序图及参数设置 (18)6.1.1 Simulink仿真参数设置 (18)6.2 仿真图形 (20)第七章总结 (21)参考文献 (22)倒立摆是进行控制理论研究的典型实验平台。
由于倒立摆系统的控制策略和杂技运动员顶杆平衡表演的技巧有异曲同工之处,极富趣味性,而且许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来,因此在欧美发达国家的高等院校,它已成为必备的控制理论教学实验设备。
学习自动控制理论的学生通过倒立摆系统实验来验证所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。
三自由度直升机极点配置控制设计与仿真
【 收稿 日期 ] 00 0 — 9 2 1 — 9 1
[ 修回 日期]2 1 — 2— 8 00 1 2
[ 基金项 目]江西省教育厅基金项目 ( J 99 ) GJ 16 0
[ 作者简介 ]邦 亮(99 , 1 一) 男,南昌航空大学信息工程学院讲师, 7 硕士。主要研究方向: 先进控制理论与应用。
2 2
第 01 2
25
3B 第1 期
南 昌航空大学学报 ( 然科学版 ) 自 J RN F N C OU ALO AN HAN HAN ON UNVE ST N U L S INC S G GK G I R IY( AT RA CE E )
三 自 由度 直 升 机 极 点 配 置 控 制 设 计 与 仿 真
和控制方 法 。
1 系统 模 型
本文介 绍 的三 自由度 直 升机实 验 系统如 图 1 所
示, 为深圳 固高 公 司 生 产 的一 款 实 时仿 真 平 台 。直
本文 将现代 控制 理论 中 的极 点配 置控制设 计 应 升机 实 验本 体 由机 械 本 体 、 螺旋 桨 电机 、 衡 块 、 平 位 用 到三 自由度 直升 机 系 统 中 , 解决 了极 点 配置 问题 置传感 器 、 电环 组 成 。两个 直流 电机 安装 在 直 升 集
在 多输入 多输 出系统 中的应用 。对三 自由度 直升 机 机本体 的末 端来 驱 动 两个 螺 旋 桨 , 过 安装 在 支 点 通 螺 系统在俯 仰轴 、 侧 轴 和旋 转 轴 方 向上 应 用 动力 学 和 两个螺 旋桨 中心 的编 码器 把 直 升 机 的俯 仰 角 、 横 和运动 学原理 进 行 数学 描 述 , 从 工程 实 际 的角 度 旋桨的翻转角和螺旋速度反馈 到控制卡 , 由用户 并 再 发 出发选 择最小 的状 态变量 获取 状态 空间模 型 。说 明 编 写 的控 制算 法计 算 出控 制量 , 给两 个 电 机进 行
基于极点配置和Pade近似的空调温度控制器的设计

第36卷第2期2019年6月苏州科技大学学报(自然科学版)Journal of Suzhou University of Science and Technology (Natural Science)Vol.36 No.2Jun.2019doi:10.12084/jassn.2096-3289.2019.02.013基于极点配置和Pade近似的空调温度控制器的设计何天羞\朱其新2*(1.苏州科技大学环境科学与工程学院,江苏苏州215009;2.苏州科技大学机械工程学院,江苏苏州215009)摘要:空调温度系统的被控对象可以看作一个具有时滞的一阶环节,时滞的存在,降低了温度控制系统的控制品 质,甚至使系统不稳定。
针对空调温度控制系统中的具有时滞的一阶对象模型,论文提出了一种基于极点配置和 Pade近似的PID(ProPorti〇n Integral Derivative)控制器的设计新方法。
Pade近似是有理函数逼近的一种方法,可以实 现系统模型函数的降阶,简化模型。
极点配置是一种通过设计反馈控制器,使得闭环传递函数的极点位于期望位置,从而使系统达到期望性能的方法。
仿真结果表明,采用极点配置和Pade近似算法的PID控制可以明显改善温度控 制系统的控制品质,使控制系统有更好的动态性能和更强的鲁棒性。
关键词:控制系统;时滞;Pade近似;极点配置中图分类号:TP273 文献标志码:A文章编号:2096-3289(2019)02-0066-05在空调温度控制过程中,在一定的条件下,其被控对象可以看成一个具有时滞的一阶环节[1_3],该时滞的 存在增加了系统的控制难度,降低了系统的控制品质。
传统P ID控制作为最常用的一种控制方式,由于其参 数易整定等特点而被广泛应用。
但对于具有时滞的对象,P ID控制常常得不到令人满意的控制效果。
S m ith预估补偿控制是最早应用于时滞系统控制的方法,其通过引人一个补偿器,以削弱时滞对系统性 能的影响。
基于精校机的广义最小方差的极点配置控制器的仿真与应用
A b t ac : A e e ai d m i m u a inc eft ig c n r lri p ia et hernd m ys e fo t i sr t gn rl ze ni m v ra e s l-un o tol sa pl bl o t a o s tm o u sde n e c
c n r l a h h a t itc hc r i pl ih e i d e i a r ng o tw i e ir c o to l h t e c a c e s isw ih ae s r e s r r m e a t m tc a a l c ryi u t a s tm c o ompu e , r n s y h t r S t a prc ia l .Thi pe o s s h g n r l e ii u Oi s h a t lvaue c s pa r pr po e t e e e ai d m nm m v ra c eft n g c ntol a d z ain e s l-u i o r l n n r e
基于极点配置的控制器设计与仿真

计算机控制理论与设计作业题目:基于极点配置方法的直流调速系统的控制器设计摘要本文目的是用极点配置方法对连续的被控对象设计控制器。
基本思路是对连续系统进行数学建模,将连续模型进行离散化,针对离散的被控对象,用极点配置的方法分别在用状态方程和传递函数两种描述方法下设计前馈和反馈控制器,并用MATLAB仿真。
文中具体以直流调速系统作为研究对象,对直流调速系统的组成和结构进行了分析,把各个部分进行数学建模,求出其传递函数,组成系统结构框图,利用自控原理的知识对结构图化简,求出被控对象的传递函数和状态方程,进一步得将其离散化。
第一种是通过极点配置设计方法的原理,用状态方程设计被控对象的控制律,因为直流调速系统存在噪声,实际状态不可测,故选择了全阶的观测器,又因为采样时间小于计算延时,所以选择了预报观测器。
利用所学知识对此闭环系统设计前馈和反馈控制器[1]。
第二种利用传统的离散传递函数,从代数多项式的角度进行复合控制器的设计,在保证系统稳定的情况下,分析系统的可实现性,稳定性,静态指标,动态指标,抗干扰等方面性能研究前馈反馈相结合控制器设计。
重点是保证被控对象的不稳定的零极点不能被抵消。
最后利用MATLAB的Simulink进行仿真,观察系统的输出的y和u和收敛性,并加入扰动看其抗干扰性能,得出结论。
经研究分析,对于直流调速系统,基于极点配置设计的前馈反馈相结合的控制器,具有良好的稳定性能和抗干扰性能。
运行结果符合实际情况。
关键词:极点配置;状态方程;直流调速系统;代数多项式;Matlab;1绪论1.1论文的背景及意义在工业生产和日常生活中,自动控制系统分为确定性系统和不确定性系统两类,确定性系统是指系统的结构和参数是确定的,确定的输入下,输出也确定的一类系统。
确定性系统相对于不确定性系统而言的。
在确定的系统中所用的变量都可用确切的函数关系来描述,系统的运动特性可以完全确定。
以确定性系统为研究对象的控制理论称为确定性控制理论。
基于极点配置的直线电机运动控制器设计

=================================伺服控制·S E R V O T E C H N I Q U E基于极点配置的直线电机运动控制器设计收稿日期:2004-12-10国家863计划项目、编号:2001A A 423260杨开明,叶佩青,尹文生(清华大学精密系,北京100084)摘要:为了提高精密工作台的轨迹跟踪精度和动态响应性能,基于辨识出的控制对象离散化模型,利用极点配置方法设计精密工作台运动控制器的前馈环节和反馈环节,构成具有两自由度结构的精密工作台运动控制系统。
通过实验,与P D +加速度前馈的控制方式相比较,精密工作台静态定位误差提高了0.5µm ;当精密工作台以120m m /s 匀速运动时,轨迹跟踪精度提高了2µm ,定位建立时间缩短了10m s 。
表明,采用极点配置方法设计的运动控制器具有较好的动态响应和轨迹跟踪性能。
关键词:精密工作台;直线电动机;运动控制中图分类号:T M 359.4文献标识码:A文章编号:1001-6848(2005)03-0049-03Mo t i o nC o n t r o l l e r D e s i g no f P r e c i s i o nS t a g e b a s e do nL i n e a r Mo t o rY A N G K a i -m i n g ,Y EP e i -q i n g ,Y I N We n -s h e n g(D e p a r t m e n t o f P r e c i s i o nI n s t r u m e n t s a n dMe c h a n o l o g y ,T s i n g h u a U n i v e r s i t y ,B e i j i n g ,100084,C h i n a )A b s t r a c t :I no r d e r t oi m p r o v e t h e t r a c k i n ga c c u r a c ya n dd y n a m i c a l r e s p o n s i b i l i t yo f t h ep r e c i s i o nw o r k t a b l e ,b a s e d o nt h e d i s c r e t e m o d e l o f t h e i d e n t i f i e dc o n t r o l l b j e c t ,p o l e a s s i g n m e n t m e t h o di s u s e dt od e s i g nt h e f e e d f o r w a r dl o o p a n df e e d b a c kl o o po f t h e m o t i o nc o n t r o l l e r f o r t h e p r e c i s i o nw o r k t a b l e .I nt h e c h e c ke x p e r i m e n t s ,c o m p a r e dt ot h e P D c o n t r o l w i t ha c c e l e r a t i o nf e e d f o r w a r d ,t h es t a t i cp o s i t i o n i n ga c c u r a c yi si m p r o v e d 0.5µm ,a n dt h et r a c k i n g a c c u r a c yi si m p r o v e d 3µm a t t h eu n i f o r m s p e e do f 120m m /s ,w h i l et h ep o s i t i o n i n ge s t a b l i s h i n gt i m er e d u c e sb y 10m s .T h e r e s u l t s s h o w t h a t m o t i o nc o n t r o l l e r s b a s e do nt h ep o l ea s s i g n m e n t m e t h o dh a v em u c hm o r ed y n a m i c a l r e s p o n s i b i l i t ya n dt r a c h i n gp e r f o r m a n c e.K e yw o r d s :p r e c i s i o ns t a g e ;l i n e a r m o t o r ;m o t i o nc o n t r o l0引言用于半导体光刻、液晶制造、精密测量和加工等领域的精密工作台,为了实现大行程、高速高精度运动,大都采用直线电机+气浮导轨的直接驱动形式[1][2]。
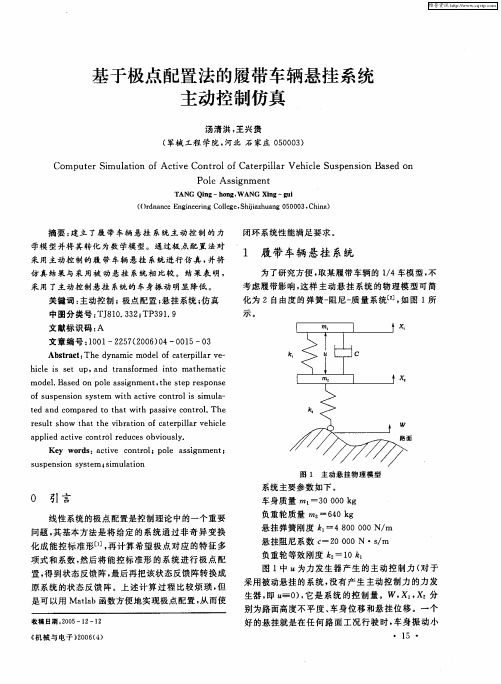
基于极点配置法的履带车辆悬挂系统主动控制仿真
h ce i e p a d r n f r d i t t e a i il s t u , n ta s o me n o ma h m tc s m o e . s d o o e a sg me t t e s e e p n e d 1 Ba e n p l s i n n ,h t p r s o s o u p n i n s s e wih a t e c n r li sm u a fs s e so y t m t c i o t o s i l— v
T G n AN Qig—h n . o g WANG ig—g i Xn u ( d a c gn e igColg . hj z u n 5 0 3. ia Or n n eEn ie rn l e S ia h a g0 0 0 Chn ) e i
摘要: 建立 了履 带 车辆 悬挂 系统主 动 控 制 的 力 学模 型并将 其转化 为 数 学模 型 。通过极 点 配置 法对 采 用主动控 制 的履 带 车辆 悬 挂 系统进 行 仿 真 , 将 并 仿 真 结果 与采 用被 动悬 挂 系统相 比较 。结 果表 明 ,
是 可 以用 Malb函数方便 地实 现极 点配 置 , 而使 t a 从
收 稿 日期 ; 0 5 2 2 2 0 一I —1
采 用被 动悬挂 的 系统 , 有产 生 主动控 制 力 的力 发 没
生器 , u - ) 它 是 系统 的控 制 量 。W , X 即  ̄0 , X , z分
t d a d c mp r d t h twi a sv o to . e e n o a e o t a t p s iec n r 1 Th h
极点配置法大林控制器matlab实现与仿真

一.设零点z1和极点p2为可相消零极点:1.仿真程序结构:初始化行相量Y ,U ,E 用来存放输出信号,控制信号与误差信号;Y,U,初始值为0,E初始值为1;for i =n1:n2由Y与U过去的值递推出Y(i);由Y(i)递推出E(i);由U过去值与E现在与过去值递推出U(i);end输出U,E阶梯式的变化曲线与Y的变化曲线;2.MATLAB程序:clc;Sp=1;n1=5;n2=180;Y=zeros(1,200);U=zeros(1,200);E=zeros(1,200);for i =n1:n2Y(i)=1.905*Y(i-1)-0.905*Y(i-2)+0.048*U(i-1)+0.048*0.967*U(i-2); E(i)=Sp-Y(i);U(i)=12.125*E(i)-12.125*0.905*E(i-1)-0.599*U(i-1)+0.368*0.967*U(i -2);endstairs(U(1:n2),'r');hold on;plot(Y(1:n2),'g');hold on;stairs(E(1:n2),'b');grid;axis([0 n2 -12.0 12.0]);3.仿真结果:4.结果分析:被控量超调量为18.5%,调节时间为11s,无稳态误差;误差量做衰减震荡,11s左右趋于零;控制量一直在做正负交替的指数衰减震荡,180s后近似趋于0.二.设零点z1和极点p2以及p1均为不许相消零极点1.仿真程序结构:初始化行相量Y ,U ,E 用来存放输出信号,控制信号与误差信号;Y,U,初始值为0,E初始值为1;for i =n1:n2由Y与U过去的值递推出Y(i);由Y(i)递推出E(i);由U过去值与E现在与过去值递推出U(i);end输出U,E阶梯式的变化曲线与Y的变化曲线;2.MATLAB程序:clc;Sp=1;n1=5;n2=20;Y=zeros(1,70);U=zeros(1,70);E=zeros(1,70);for i =n1:n2Y(i)=1.905*Y(i-1)-0.905*Y(i-2)+0.048*U(i-1)+0.048*0.967*U(i-2);E(i)=Sp-Y(i);U(i)=14.45*E(i)-14.45*0.5735*E(i-1)-0.4252*U(i-1);endstairs(U(1:n2),'r');hold on;plot(Y(1:n2),'g');hold on;stairs(E(1:n2),'b');grid;axis([0 n2 -0.6 3.0]);3.仿真结果:4.结果分析:被控量超调为51.2%,调节时间为16s,无稳态误差;误差量做正负交替的衰减震荡,16s趋于零;控制量也做正负交替的指数衰减震荡,但衰减很快,15s左右稳定在0上;。
基于单零单极点控制方式的4A开关电源仿multisim仿真研究解析

基于单零单极点控制方式的4A开关电源仿multisim仿真研究学院:电气与光电工程学院专业:电气工程及其自动化班级:姓名:学号:目录一、课题背景 (1)1.1、BUCK电路分析 (1)1.2、BUCK开关电源的应用 (2)二、课题设计要求 (4)三、课题设计方案 (4)3.1、系统的组成 (4)3.2、主电路部分的设计 (5)3.2.1、R C和C的计算 (5)3.2.2、滤波电感L的计算 (5)3.2.3、主电路开环系统的仿真 (6)3.3、闭环系统的设计 (7)3.3.1、GO(s)的计算 (7)3.3.2、补偿控制器的设计 (7)3.4、闭环系统的仿真 (10)3.4.1、参数设置 (10)3.4.2、不加干扰时的电路仿真 (11)3.4.3、加干扰时的电路仿真 (12)四、总结及心得体会 (13)参考文献 (14)附录 (15)一、课题背景1.1、BUCK 电路分析图1.1 BUCK 电路图通过分析图1.1可知,1、零时刻开关管导通电源E 向负载供电,负载电压U0=E ,负载电流呈指数曲线上升见式1-1。
(/)0()R L t i t I e = (1-1)此时电感储能如式(1-2)。
212w Li = (1-2) 2、t1时刻控制开关管关断,负载电流经二极管VD 续流,负载电压U0≈0,负载电流呈指数曲线下降见式(1-3),为了使负载电流连续且脉动小,通常串接L 值较大的电感。
图1.2 二极管续流图(/)0()R L ti t I e -= (1-3) 通过波形可算出BUCK 电路Ud 、占空比、计算过程见式(1-4)。
01ont on d t U Edt E T T==⎰ (1-4) 1.2、BUCK 开关电源的应用随着开关电源技术的迅速发展,DC/DC 开关电源已在通信、计算机以及消费类电子产品等领域得到了广泛应用。
近年来,电池供电便携式设备的需求越来越大,对DC/DC 开关电源的需求也日益增大,同时对其性能要求也是越来越高。
极点配置状态反馈控制器的设计

极点配置状态反馈控制器的设计王俊伟于新海(河套学院机电工程系)摘要围绕双级倒立摆案例,对极点配置状态反馈控制器的设计方法展开讨论,对最终的计算结果进行仿真,并通过仿真结果分析了系统的稳定性、动态性能和稳态误差情况。
倒立摆的开环系统状态空间模型状态不稳定且动态性能较差,通过引进极点配置状态反馈控制器,倒立摆的闭环系统状态达到稳定,而且动态性能得到改善。
关键词状态反馈控制器双级倒立摆极点配置能控标准型爱克曼公式动态特性稳态误差中图分类号TH865文献标识码B文章编号1000-3932(2021)01-0015-05极点配置状态反馈控制器设计得好坏直接决定了控制系统动态性能的优劣!配置极点的目的不仅是使系统稳定还要使系统的动态性能满足控制要求[1]!在配置状态反馈控制器时,根据被控制对象的要求,可以采用3种方法实现:极点配置状态反馈控制器的直接法、极点配置状态反馈控制器的变换法和爱克曼公式[2]'这3种方法仅适用于单输入系统,优点是只要系统能控,就可以实现极点配置的状态反馈,缺点是不能用于多输入系统的极点配置状态反馈控制器。
对于单输入系统,如果系统能控可以实现极点的任意配置,改善动态性能,但有可能使闭环控制系统的稳态误差变大[3]!1极点配置状态反馈控制器的直接法线性时不变系统如下:x=Ax+Bu(])'=Cx其中,X是系统的*维状态向量;*是状态向量对时间的导数;u是状态反馈控制律;#、B和C是适当维数的已知常数矩阵;'是系统的输出。
采用的状态反馈控制律是:u=-kx+v(2)其中,-是一维外部输入;k是反馈增益矩阵。
将式(2)代入式(1)得到闭环系统状态方程:*二(.-Bk)x+B-(3)极点配置状态反馈控制器的直接法分5步实现⑷。
第1步,检验系统(1)的能控性,如果系统能控,进行第2步。
第2步,计算闭环系统特征多项式:)et[!0—(#—Bk)]二!*+(3*_]+k*_14!*i1--------(3]+k])!+30+,0(4)其中,!是闭环极点。
极点配置状态反馈控制器设计方法
极点配置状态反馈控制器设计方法
嘿,朋友们!今天咱来聊聊极点配置状态反馈控制器设计方法。
这玩意儿啊,就像是给一个系统装上了精准的导航仪,能让它乖乖地按照咱的想法走。
你看啊,一个系统就好比是一辆汽车,而极点配置状态反馈控制器就是那个掌握方向盘的司机。
咱得通过巧妙的设计,让这个司机能精准地操控汽车,该加速的时候加速,该转弯的时候转弯,不能有一点儿含糊。
设计这个控制器就像是搭积木,一块一块地拼凑起来。
咱得先了解系统的特性,就像了解汽车的性能一样。
然后呢,根据这些特性来选择合适的参数,这可不能马虎,得仔细琢磨。
比如说,要是参数没选好,那可就糟糕啦!就像司机开车老是开歪一样,系统也会变得不稳定,那可不行!咱得让系统稳稳当当的,该干啥干啥。
这其中的学问可大着呢!就好像做菜一样,各种调料得搭配得恰到好处,才能做出美味的菜肴。
极点配置状态反馈控制器的设计也是如此,每个环节都得精心处理。
而且哦,这个设计方法可不是一成不变的。
不同的系统就像不同口味的人,得用不同的方法去对待。
有时候得灵活一点,不能太死板啦。
想想看,如果所有系统都用一种方法去设计控制器,那多无趣啊!就像所有人都穿一样的衣服,那还有啥意思呢?咱得根据实际情况来调整,找到最适合的方案。
在实际应用中,这可真是帮了大忙啦!它能让那些复杂的系统乖乖听话,按照我们的要求运行。
这多厉害呀!难道不是吗?
所以啊,极点配置状态反馈控制器设计方法可真是个宝贝!咱可得好好研究,好好利用。
让它为我们的各种系统服务,让它们变得更智能、更高效。
怎么样,是不是觉得很有意思呢?别犹豫啦,赶紧去试试吧!。
自动控制理论实验课程6.3.1 极点配置仿真实验

极点配置(一)实验原理给定一个连续时间系统的状态空间模型:Bu Ax x += (1)其中:x 是系统的n 维状态向量,u 是m 维控制输入,A 和B 分别是适当维数的已知常数矩阵。
在状态反馈Kx -=u (2)作用下,闭环系统的状态方程是x BK A x )(-= (3)由线性时不变系统的稳定性分析可知,闭环系统(3)的稳定性由闭环系统矩阵A-BK 的特征值决定,即闭环系统(3)渐近稳定的充分必要条件是矩阵A-BK 的所有特征值都具有负实部。
而由经典控制理论知道,矩阵A-BK 的特征值也将影响诸如衰减速度、振荡、超调等过渡过程特性。
因此,若能找到一个适当的矩阵K ,使得矩阵A-BK 的特征值位于复平面上预先给定的特定位置,则以矩阵K 为增益矩阵的状态反馈控制器(2)就能保证闭环系统(3)是渐近稳定的,且具有所期望的动态响应特性。
这种通过寻找适当的状态反馈增益矩阵K ,使得闭环系统极点(即矩阵A-BK 的特征值)位于预先给定位置的状态反馈控制器设计问题称为是状态反馈极点配置问题,简称为极点配置问题。
对给定的线性定常系统(1)和一组给定的期望闭环极点},,{n 2,1λλλ =Ω,按以下步骤可以设计出使得闭环系统(3)具有给定极点},,{n 2,1λλλ =Ω的状态反馈控制器(2)。
第1步:检验系统的能控性。
如果系统是能控的,则继续第2步。
第2步:利用系统矩A 阵的特征多项式0111)det(a a a A I n n n +++=---λλλλ (4)确定的110,,,-n a a a 值。
第3步:确定将系统状态方程变换为能控标准形的变换矩阵T 。
若给定的状态方程已是能控标准形,那么T=I 。
非奇异线性变换矩阵T 可按如下方式确定:可控性矩阵:],b ,[1b A A b U n -= (5)计算1-U ,并记最后一行为h给出变换阵:112],,,h [--=n hA hA hA T (6)第4步:利用给定的期望闭环极点,可得期望的闭环特征多项式为011121)())((b b b n n n n +++=-----λλλλλλλλλ (7)并确定110,,,b -n b b 的值第5步:确定极点配置状态反馈增益矩阵K :T a b a b a b a b K n n n n ],,,[11221100--------= (8)也可以通过待定系数的方法来确定极点配置状态反馈增益矩阵K 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机控制理论与设计作业题目:基于极点配置方法的直流调速系统的控制器设计摘要本文目的是用极点配置方法对连续的被控对象设计控制器。
基本思路是对连续系统进行数学建模,将连续模型进行离散化,针对离散的被控对象,用极点配置的方法分别在用状态方程和传递函数两种描述方法下设计前馈和反馈控制器,并用MATLAB仿真。
文中具体以直流调速系统作为研究对象,对直流调速系统的组成和结构进行了分析,把各个部分进行数学建模,求出其传递函数,组成系统结构框图,利用自控原理的知识对结构图化简,求出被控对象的传递函数和状态方程,进一步得将其离散化。
第一种是通过极点配置设计方法的原理,用状态方程设计被控对象的控制律,因为直流调速系统存在噪声,实际状态不可测,故选择了全阶的观测器,又因为采样时间小于计算延时,所以选择了预报观测器。
利用所学知识对此闭环系统设计前馈和反馈控制器[1]。
第二种利用传统的离散传递函数,从代数多项式的角度进行复合控制器的设计,在保证系统稳定的情况下,分析系统的可实现性,稳定性,静态指标,动态指标,抗干扰等方面性能研究前馈反馈相结合控制器设计。
重点是保证被控对象的不稳定的零极点不能被抵消。
最后利用MATLAB的Simulink进行仿真,观察系统的输出的y和u和收敛性,并加入扰动看其抗干扰性能,得出结论。
经研究分析,对于直流调速系统,基于极点配置设计的前馈反馈相结合的控制器,具有良好的稳定性能和抗干扰性能。
运行结果符合实际情况。
关键词:极点配置;状态方程;直流调速系统;代数多项式;Matlab;1绪论1.1论文的背景及意义在工业生产和日常生活中,自动控制系统分为确定性系统和不确定性系统两类,确定性系统是指系统的结构和参数是确定的,确定的输入下,输出也确定的一类系统。
确定性系统相对于不确定性系统而言的。
在确定的系统中所用的变量都可用确切的函数关系来描述,系统的运动特性可以完全确定。
以确定性系统为研究对象的控制理论称为确定性控制理论。
本文以直流调速系统为研究对象,利用极点配置的设计方法,包括利用状态空间模型和传递函数模型分别描述线性系统,采用闭环极点为指标的控制器设计的理论和方法,设计出前馈和反馈控制器,组建闭环控制系统,用Matlab进行仿真可以逼真地还原出实际系统。
1.2 论文的主要内容本文直流电机的调速系统的模型作为研究对象,利用线性系统极点配置的设计方法,设计前馈反馈控制器。
论文研究的主要内容 :(1)阅读学习国内外期刊文献,研究了极点配置的基本原理和Matlab的实现方法。
(2)系统的说明直流电机的系统结构和工作原理并分析,建立直流调速系统的数学模型,将其进行离散化,并讨论其传递函数与状态方程之间的关系。
(3)分析极点配置控制器的设计原理,利用状态方程设计控制器。
(4)将被控对象的传递函数离散化,利用传递函数模型设计控制器。
(4)在MATLAB中建立闭环直流调速系统的模型,根据闭环极点配置的设计步骤编写程序,用Simulink搭建仿真系统,对闭环直流调速系统的输出进行仿真分析。
(5)对仿真结果分析。
将仿真结果与实际直流调速系统的阶跃响应的各项参数相比较,得出结论。
2直流调速系统数学模型的建立2.1直流电动机的基本结构分析.2.1.1单闭环直流调速系统的搭建直流调压调速是现代工业实际生产中应用相当广泛的一种调速方法[2],利用电力电子元器件的可控性,再使用脉宽调制技术加以调制 ,就构成了直流脉宽调速系统。
电气原理结构图如图2-6所示。
图2-1直流脉宽调速系统的电气原理结构图调节原理是在反馈控制的闭环直流调速系统中,与电动机同轴安装一台测速发电机 TG ,从而引出与被调量转速成正比的负反馈电压Un ,与给定电压 U*n 相比较后,得到转速偏差电压Un ,经过放大器 A ,产生电力电子变换器UPE 的控制电压Uc ,用以控制电动机转速n 。
将上述直流调速系统原理图抽象成动态结构框图,分析直流调速系统,如图2-7所示:+-+-图中ASR 代表转速调节器,它可以是PID 控制器或模糊控制器;K s 代表电力电子变换器模型;1/C e 代表直流电动机模型;α表示反馈环节;I d R 表示扰动或负载。
下面就上述结构框图中的各个环节的数学模型进行推导。
2.2直流调速系统数学模型的建立为了分析调速系统的稳定性和动态品质,必须首先建立描述系统动态物理规律的数学模型,对于连续的线性定常系统,其数学模型是常微分方程,经过拉氏变换,可用传递函数和动态结构图表示。
建立系统动态数学模型的基本步骤如下:(1)根据系统中各环节的物理规律,列出描述该环节动态过程的微分方程; (2)求出各环节的传递函数;①构成系统的主要环节是电力电子变换器和直流电动机。
不同电力电子变换器的传递函数,它们的表达式是相同的,都是:(2-1)②直流电动机的等效电路如图2-8所示图2-3 他励直流电动机等效电路ss s ()1K W s T s ≈++-L 图2-2 直流调速系统动态结构框图假定主电路电流连续,则动态电压方程为:(2-2)如果,忽略粘性磨擦及弹性转矩,电机轴上的动力学方程为: (2-3)额定励磁下的感应电动势和电磁转矩分别为:式中: T L -包括电机空载转矩在内的负载转矩,N-m ;GD 2— 电力拖动系统折算到电机轴上的飞轮惯量,N-m2; —电机额定励磁下的转矩系数N-m/A ; 定义下列时间常数 — 电枢回路电磁时间常数,s ;— 电力拖动系统机电时间常数,s 。
代入式(2-2)和(2-3),并考虑式(2-4)和(2-5),整理后得(2-6) (2-7)2e L d 375d GD nT T t-=dd0d d d I U RI L Et=++RL T l =me 2m 375C C R GD T =dd0d m d dL d ()d d d l I U E R I T tT E I I R t-=+-=e m π30C C =e m de T C I E C n==(2-4)式中为负载电流在零初始条件下,取等式两侧的拉氏变换,得电压与电流间的传递函数电流与电动势间的传递函数综合由以上各式得直流电机框图如图2-9:图2-4直流电动机的动态的结构图③放大器传函④测速反馈传函mLdL C T I =d d01()()()1l I s R U s E s T s =-+d dL m ()()()E s RI s I s T s=-(2-8)(2-9)c a pn ()()()U s W s K U s ==∆c a pn ()()()U s W s K U s ==∆(2-10)(2-11)(3)组成系统的动态结构图并求出系统的传递函数。
知道了各环节的传递函数后,把它们按在系统中的相互关系组合起来,就可以画出闭环直流调速系统的动态结构图,如图2-10所示。
由图可见,将电力电子变换器按一阶惯性环节处理后,带比例放大器的闭环直流调速系统可以看作是一个三阶线性系统。
图2-5直流调速系统的动态的结构图设I dl =0,从给定输入作用上看,闭环直流调速系统的闭环传递函数是:进一步得反馈控制闭环直流调速系统的特征方程为:根据三阶系统的劳斯判据,系统稳定的充分必要条件是:(2-12)32m s m s m s()10111l l T T T T T T T T s s s K K K+++++=+++(2-13)2m s s ()l T T T T K T T ++<(2-14)p se c 32m s m s m s(1)()()1111l l l K K C K W s T T T T T T T T s s s K K K+=++++++++对于一个自动控制系统来说,稳定性是它能否正常工作的首要条件,是必须保证的。
图2-6直流调速系统的动态的结构图2.2.1直流调速系统参数的给定如图转速闭环负反馈的调速系统中,无电流反馈,直流电动机各环节的参数为:额定电压UN =220V,额定电流Idn=55A,额定转速nN=100r/min,电动机电动势系数Ce=0.192V*min/r晶闸管的放大系数Ks=0.44,滞后时间常数Ts=0.167s电枢回路电阻R=1Ω,电枢回路电磁时间常数Tl=0.00167s电力拖动系统机电常数Tm=0.75s;转速反馈系数α=0.01,V*min/r;对应而定转速给定电压Un=10V(1)直流调速系统各环节参数的确定①图中Kp为比例环节利用闭环系统稳定关系(2-14)式,代入参数可得Kp=23.8。
②由第二章式(2-1)可知电力电子器件的传递函数,代入参数Ks=44,Ts=0.0167: 得:(2.15)③由第二章式(2-8)和(2-9)可得直流电动机机电和电磁两部分传递函数:④图中反馈系数α可以由给定额定电压和额定转速可得:⑤电动机电动势系数2421/ 5.21 1.30.751e m L m C G T T s T s e s s -==++++ (2-16)s2s s m )(T T T T T T K l l ++<1017.01)()()(0d d +=-s s E s U s I ss I s I s E 075.01)()()(dL d =-01.0100010===N N n U α2.5192.011==e C 0..440.1671S G s =+(2)得到直流调速系统的传递函数1222.280.68.171G G G s s =≈++(2-17)3基于状态空间模型的极点配置的控制器设计3.1极点配置设计方法的原理系统的动态行为主要是由闭环系统的极点决定的。
极点配置设计的基本原理,就是按照控制系统的性能要求和被控对象的某些特征,先确定控制系统的闭环极点,再设计出控制器,使得闭环系统的闭环极点与期望的闭环极点相同。
基于状态空间模型的控制器的设计,可以采用状态反馈和输出反馈两种形式,其含义是分别将观测到的状态量或输出量取作反馈量构成反馈控制律,从而构成闭环控制,以达到期望的闭环系统的性能指标。
由于系统的状态变量比系统的输出变量更好的反映系统的性能。
实际上,从状态空间模型的输出方程可以看出,输出变量可以看做状态变量的子空间,因此输出反馈也称为部分状态反馈。
状态反馈可以实现任意极点配置;而输出反馈对于能空能观的系统则不能进行任意极点的配置。
3.2极点配置设计控制器的步骤(1)按对系统的性能要求给定n 个控制极点。
(2)按极点配置设计出控制律。
(3)选择观测器的类型,若检测准确,而且检测量是其中的一个状态,则可以考虑用降阶观测器,否则仍选用全阶观测器。
若控制器的计算延时与采样周期的大小处于同一量级,则可以采用预报观测器,否则可以考虑采用现实观测器。