下肢外骨骼康复机器人的研究与进展
下肢外骨骼康复行走机器人控制系统设计

1、高度智能化:通过机器学习算法的不断训练和优化,控制系统的控制精度 得到了显著提高。
2、良好的适应性:系统能够根据不同患者的实际情况自动调整参数,满足个 性化的康复需求。
3、高度安全性:在系统中引入了多重安全保护措施,确保了患者在使用过程 中的安全。实验验证结果表明,该控制系统在帮助患者进行站立、行走等运动 方面具有显著效果,能够有效改善患者的运动功能。然而,仍存在一些不足之 处,如对患者的身体状态和运动数据的实时监测尚不完善,部分传感器数据的 准确性和稳定性有待提高等。
方法
为了实现上述目标,本次演示采用以下步骤和方法进行控制系统设计:
1、需求分析:首先对下肢外骨骼康复行走机器人的应用场景、患者需求、现 有产品的优缺点等进行深入调研和分析。
2、系统架构设计:根据需求分析结果,设计下肢外骨骼康复行走机器人的整 体架构,包括机械结构、控制器、传感器、执行器等组成部分。
下肢外骨骼康复机器人控制系统的主要设计原理基于人体运动学和动力学原理, 同时结合了机械设计、电子控制、传感器技术等多学科知识。具体实现方法和 步骤如下:
1、硬件设备选择:控制系统硬件设备包括机械结构、电机、传感器、电路板 等。根据使用者的身体状况和康复需求,选择轻便、耐用且符合人体工程学原 理的硬件设备。
3、设备性能方面,下肢外骨骼行走康复机器人具备良好的稳定性和耐用性, 但仍然存在一些可以改进的空间,如提高设备的自适应性、降低能耗等方面的 研究。
讨论:
根据研究结果,我们对下肢外骨骼行走康复机器人的研究现状进行了讨论。虽 然该领域已经取得了一定的进展,但仍存在一些问题需要进一步解决。例如, 设备重量和穿戴舒适度是影响用户体验的关键因素之一,如何通过优化设计和 材料选择等方式减轻设备重量、提高穿戴舒适度是未来的研究方向之一。
下肢动力外骨骼机器人进展研究
工业技术①基金项目:老人陪护情感机器人研制项目(项目编号:2017YFB1304104)。
作者简介:包仁人(1986,9—),男,汉族,辽宁本溪人,博士,中级工程师,研究方向:医疗康复机器人、养老机器人、助残 机器人。
DOI:10.16660/ki.1674-098X.2019.13.076下肢动力外骨骼机器人进展研究①包仁人 冯健 陆英男 沈庆杰 邓德智(沈阳新松机器人自动化股份有限公司 辽宁沈阳 110168)摘 要:伴随着人口老龄化和意外事故的不断增加,需要进行下肢康复训练和下肢功能代偿的人群也不断增加,而下肢动力外骨骼机器人恰好能在这一过程能发挥重要的作用。
目前已经商品化的外骨骼产品主要集中在美国、欧洲、日本,主要应用领域为医疗、助残、助务;而中国2015年后也在此方向出现了一批创业公司,以医疗和助残为主要目的,部分产品已经进入到了实际应用环节。
本文通过介绍主要商品化的下肢动力外骨骼机器人产品,给各位研究者提供参考。
关键词:下肢 外骨骼机器人 医疗康复 助残 能力增强中图分类号:TP242 文献标识码:A 文章编号:1674-098X(2019)05(a)-0076-03伴随着人口老龄化和意外事故的不断增加,偏瘫、中风、脑卒中、截瘫等患者也不断增多,其中只有相当一小部分能得到肢体康复训练。
根据当代医学理论和临床医学实践证明,欲对肢体运动功能进行恢复、提高和代偿,除了必要的医疗手段外,科学和正确的康复训练也是十分有效的,而下肢动力外骨骼机器人恰好能满足这些需求[1]。
目前下肢外骨骼机器人主要在医用康复、养老、助残等领域里有更为实际的应用。
本文通过对下肢外骨骼机器人产品发展现状的论述,给相关研究人员提供参考。
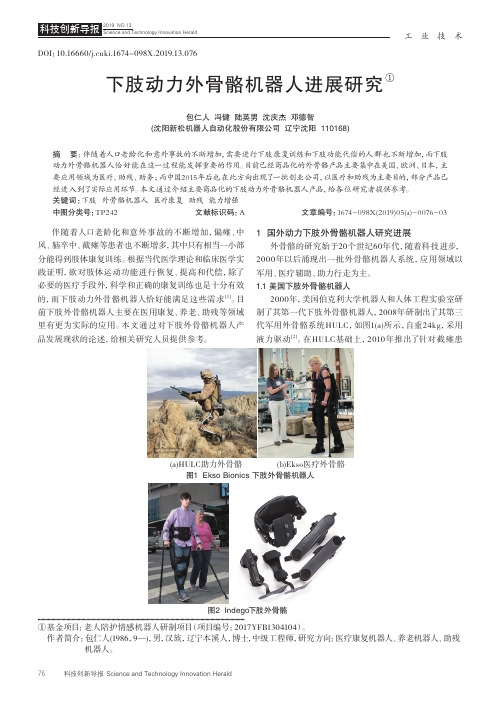
1 国外动力下肢外骨骼机器人研究进展外骨骼的研究始于20个世纪60年代,随着科技进步,2000年以后涌现出一批外骨骼机器人系统,应用领域以军用、医疗辅助、助力行走为主。
1.1 美国下肢外骨骼机器人2000年,美国伯克利大学机器人和人体工程实验室研制了其第一代下肢外骨骼机器人,2008年研制出了其第三代军用外骨骼系统HULC,如图1(a)所示,自重24kg,采用液力驱动[2]。
下肢康复医疗外骨骼发展现状综述

下肢康复医疗外骨骼发展现状综述摘要:下肢康复医疗外骨骼能够辅助下肢运动障碍患者进行康复训练,因其巨大的应用前景,成为当前各国研究的热点;从跑步机式和陆基式两类康复医疗外骨骼出发,分析了下肢康复医疗外骨骼国内外发展现状,叙述了典型产品和模型,机械、控制部分的研究过程,通过分析典型产品模型,推测康复医疗外骨骼机器人应具有的结构与控制特性;展望康复医疗外骨骼领域应重点研究刚柔耦合、个体运动差异兼容、多模信息融合等关键技术。
关键词:康复医疗;外骨骼;刚柔耦合;助力效能康复医疗机器人具有广阔的应用前景,日益成为国内外专家学者的研究热点,其中下肢康复医疗是康复医疗的研究重点。
随着人口老龄化及人们生活水平的提高,下肢行动不变的人口数量急剧升高,行走不便将影响患者的正常生活[1]。
我国有着世界上最高的中风发生率,大约有1 500万人有下肢运动障碍,大约4 000万老人在逐渐失去行走能力,每年对下肢康复训练设备需求量高达35万套,但是目前市场提供的设备却少于2万台[2]。
下肢康复外骨骼可以减轻康复医师的负担,提高康复训练效率及效果,实时获取康复训练数据和评估训练效果[3]。
其功能主要包括:维持关节活动度、防止关节挛缩、纠正步态、重塑神经系统等。
根据结构类型,下肢康复外骨骼可分为跑步机式和陆基式两种,患者可通过使用跑步机式康复医疗外骨骼在跑步机上获得行走康复训练,在这种类型的外骨骼中,为了保证安全,保持平衡,需要一套人体重量支撑系统,来减小重力对腿部的影响。
陆基式外骨骼帮助患者在地面上行走,重获行走能力。
按照应用类型,下肢康复医疗外骨骼可分为辅助行走和康复训练两类。
1 国内外研究现状1.1 国外研究现状下肢康复外骨骼方面的研究起始于1960年[4],由于当时技术的限制,这些装备没有实现当时预期的目标,但是为后续研究打下了基础,最近几十年,尤其是Lokomat应用于临床以后,下肢康复机器人逐渐成为世界各国研究的热点。
无源下肢外骨骼的工作机理和动力学特性研究
无源下肢外骨骼的工作机理和动力学特性研究无源下肢外骨骼的工作机理和动力学特性研究【引言】随着人工智能和机器人技术的不断发展,无源下肢外骨骼成为了康复和助力行走的重要设备。
无源下肢外骨骼通过对人体下肢关节运动进行辅助和增强,提供力矩和力量,帮助行动不便者恢复行走能力。
本文将从无源下肢外骨骼的工作机理和动力学特性两个方面进行研究。
【无源下肢外骨骼的工作机理】无源下肢外骨骼由传感器、控制系统和执行机构组成。
其中,传感器用于检测人体下肢关节的运动状态,控制系统根据传感器数据进行实时计算和控制,执行机构则根据控制系统的指令提供力矩和力量。
1. 传感器:无源下肢外骨骼常用的传感器有惯性测量单元(IMU)和电子力感知器(FSR)。
IMU可以通过测量人体关节的加速度和角速度来判断人体下肢关节的运动状态,FSR则可以检测压力和力量的变化。
传感器的准确性和灵敏度直接影响着外骨骼的性能。
2. 控制系统:控制系统是无源下肢外骨骼的核心,它根据传感器的数据进行实时计算和控制。
传感器数据经过信号处理和滤波后,输入控制算法中。
控制算法根据不同的任务需求、用户需求和人体生理特征,设计出适合的控制策略。
目前常见的控制策略包括基于模型的方法、基于反馈的方法和神经网络控制等。
3. 执行机构:执行机构是无源下肢外骨骼提供力矩和力量的部件。
常用的执行机构包括电机、气缸和弹簧等。
电机通常用于提供力矩和力量,通过控制电机转矩和速度来输出所需的力矩。
气缸则通过压缩气体来提供力矩和力量,其输出受到气压和气缸几何结构的影响。
【无源下肢外骨骼的动力学特性】动力学特性是衡量无源下肢外骨骼性能的重要指标,主要包括负载能力、稳定性和能耗。
1. 负载能力:负载能力是指无源下肢外骨骼能够承受的最大载荷。
影响负载能力的因素包括执行机构的输出力和力矩、关节摩擦力和机械刚度等。
提高负载能力可以通过增加执行机构的峰值力矩和输出功率,以及减小关节摩擦力来实现。
2. 稳定性:稳定性是指无源下肢外骨骼在使用过程中保持平衡和稳定的能力。
下肢外骨骼康复机器人控制系统设计与研究

下肢外骨骼康复机器人控制系统设计与研究一、本文概述随着科技的不断进步,医疗康复领域迎来了前所未有的发展机遇。
下肢外骨骼康复机器人作为一种辅助人体行走、促进康复的重要设备,其设计与研究具有重要的实践意义和理论价值。
本文旨在探讨下肢外骨骼康复机器人的控制系统设计,包括硬件构成、软件编程以及运动控制策略等方面,以期为提高康复效果、促进患者康复进程做出贡献。
本文首先介绍了下肢外骨骼康复机器人的研究背景和发展现状,阐述了其在医疗康复领域的应用前景。
随后,详细分析了下肢外骨骼康复机器人控制系统的设计要求和技术难点,包括机械结构设计、传感器选型与配置、运动学建模与控制算法设计等方面。
在此基础上,本文提出了一种基于人机交互的下肢外骨骼康复机器人控制策略,以实现精准的运动轨迹控制和个性化康复治疗。
接下来,文章重点阐述了下肢外骨骼康复机器人控制系统的设计与实现过程。
介绍了控制系统的硬件构成,包括主控制器、驱动器、传感器等关键部件的选型与配置。
然后,详细描述了控制系统的软件编程,包括运动学建模、控制算法实现、人机交互界面开发等方面。
通过实验验证和临床应用测试,评估了所设计的控制系统的性能和效果。
本文的研究成果不仅为下肢外骨骼康复机器人的设计与研究提供了有益的参考,也为医疗康复领域的技术创新和发展提供了新的思路和方法。
未来,我们将继续深入研究下肢外骨骼康复机器人的控制策略和技术应用,以期为患者提供更加高效、个性化的康复治疗方案。
二、下肢外骨骼康复机器人基础理论下肢外骨骼康复机器人作为一种辅助人体下肢运动的医疗设备,其基础理论涉及多个学科领域,包括生物力学、机器人技术、控制理论以及人机交互等。
生物力学基础:生物力学是研究生物体在力学作用下的反应和适应的科学。
在下肢外骨骼康复机器人的设计中,必须充分理解人体下肢的生物力学特性,包括骨骼结构、肌肉力量分布、关节运动范围等。
这些特性为机器人设计提供了重要的参考依据,确保了机器人在辅助人体运动时能够符合生物力学规律,避免对人体造成不必要的损伤。
基于外骨骼的可穿戴式上肢康复机器人设计与研究

基于外骨骼的可穿戴式上肢康复机器人设计与研究一、本文概述随着科技的快速发展和人口老龄化趋势的加剧,康复机器人的研究和应用日益受到重视。
在众多康复机器人中,基于外骨骼的可穿戴式上肢康复机器人因其独特的设计理念和实际应用价值,成为了康复工程领域的研究热点。
本文旨在探讨基于外骨骼的可穿戴式上肢康复机器人的设计与研究,通过对其结构、功能、控制策略等方面进行深入分析,以期为该领域的研究提供有益的参考和借鉴。
本文首先介绍了上肢康复机器人的研究背景和意义,阐述了其在康复治疗中的重要性和迫切性。
接着,综述了国内外在该领域的研究现状和发展趋势,分析了现有技术的优缺点和面临的挑战。
在此基础上,提出了一种基于外骨骼的可穿戴式上肢康复机器人的设计方案,并详细介绍了其机械结构、传感器配置、控制系统等方面的内容。
本文的重点在于研究该康复机器人的运动学特性、动力学模型以及控制策略。
通过建立合理的数学模型,分析了机器人在不同运动模式下的运动学和动力学特性,为后续的控制算法设计提供了理论基础。
同时,针对康复机器人的特点,提出了一种基于人机交互力感知的智能控制策略,实现了机器人在康复训练过程中的自适应调整和优化。
本文通过实验验证了所设计的康复机器人的可行性和有效性。
通过对比实验和数据分析,证明了该机器人在上肢康复训练中具有良好的辅助效果和康复效果,为临床康复治疗提供了新的可能性和选择。
本文的研究内容对于推动基于外骨骼的可穿戴式上肢康复机器人的发展具有重要的理论意义和实践价值。
希望通过本文的探讨和研究,能够为相关领域的研究者和实践者提供有益的参考和启示。
二、相关理论基础与技术外骨骼,又称作动力外骨骼或动力服,是一种可穿戴设备,旨在为穿戴者提供额外的力量或运动能力。
外骨骼通常由硬质的外部框架和一组动力机构组成,可以通过机械、液压或气压传动系统驱动。
外骨骼技术最初是为了军事和航空航天应用而开发的,旨在增强士兵或宇航员的负载能力和运动性能。
可穿戴下肢外骨骼康复机器人研究现状与发展趋势

0引言科学技术的发展和医疗水平提高的同时,人均寿命延长,社会老龄群体和运动功能障碍患者数量逐年上升,对辅助运动和运动功能恢复的需求随之增大。
除了初期的康复治疗外,后期借助辅助医疗设备进行康复训练具有重大意义。
传统的治疗手段是由具有一定经验的康复医师一对一地对患者进行康复训练,该方法治疗效果好,但受康复医师人力所限,治疗成本高,治疗的时间、地点受限,通常不能达到预期效果。
为此,国内外医疗机构通常选用医疗机器人代替治疗师进行康复训练,这样不仅降低成本、提高治疗效果,还可以为患者提供安全可靠的治疗方案和手段[1]。
传统大型康复器械通常体积大、不可移动、训练模式单一、环境枯燥。
可穿戴下肢外骨骼康复机器人是机械、电子、人机交互、仿生学等交叉融合的学科,穿戴于患者肢体上,通过检测穿戴者的运动意图,辅助并保护其进行康复训练的智能化、机械化康复设备。
可穿戴下肢外骨骼康复机器人弥补了传统治疗方式的不足,摆脱了悬挂式等大型康复设备的场地局限性,备受社会关注[2]。
本文主要介绍可穿戴下肢外骨骼康复机器人的研究状况,论述其关键技术,展望其发展方向。
1国内外研究现状1.1国外研究现状康复医疗机器人最早始于1890年俄罗斯人Yagn[3]设计的世界第一个增强跑跳能力的下肢外骨骼装置———Assistead-walking Device。
1965年,美国通用电气公司与康奈尔大学研制了全身外骨骼试验样机Hardiman[4-5]。
20世纪70年代初,南斯拉夫人Vukobratovic[6]系统性地提出了下肢动力外骨骼设计理论与方法,并研制出具有骨盆扭转补偿功能的电可穿戴下肢外骨骼康复机器人研究现状与发展趋势李龙飞1,朱凌云1,2*,苟向锋1,2(1.天津工业大学机械工程学院,天津300387;2.天津市现代机电装备技术重点实验室,天津300387)[摘要]介绍了国内外可穿戴下肢外骨骼康复机器人的研究现状,指出了该领域目前研究的热点问题。
下肢外骨骼机构的研究与仿真讲解

国内外研究现状
由前苏联圣彼得堡的研究者开发,重87千克。 1970年
国内外研究现状
由前南斯拉夫的Vukobratovic开发,用于截 瘫病人的行走恢复治疗,该系统由气缸驱 动.1971年
国内外研究现状
由日本筑波大学的山海嘉之教授所领导的 Cybernics Lab开发的HAL(Hybrid Assistive Limb) 系列下肢外骨骼用于协助步态紊乱的病人 行走。HAL-3是套下肢装,专门设计来帮助 下肢残障者或是老人们,能方便地进行日常 生活中的许多动作,像是走路、上下楼梯等 等。它采用了角度传感器、肌电信号传感器 和地面接触力传感器等传感设备来获得外骨 骼和操作者的状态信息。它的所有的电机驱 动器、测量系统、计算机和无线局域网络, 以及动力供应设备都整合到背包中。使用装 在腰间的电池进行供电。HAL拥有混合控制 系统,包括自动控制器进行诸如身体姿态的 控制,以及基于生物学反馈和预测前馈的舒 适助力控制器。重22公斤
图片来自http://www.we.kanagawa-it.ac.jp/~yamamoto_lab/pas/index.htm
国内外研究现状
瑞士苏黎士联邦工业大学(ETH)在汉诺威2001年世界工业展览会上展出的名 为LOKOMAT的康复机器人模型。
图片来自 /0105910/images /lokomat_2.jpg
下肢外骨骼机构的研究与仿真
Agenda
• • • • 国内外研究现状 人行走机理分析 下肢外骨骼的建模与仿真 参考文献
国内外研究现状
Hardyman,该系统由通用电气(General Electric)研发,用于增强士兵的持重及负重 能力,操作者操纵内侧的外骨骼,由液压驱 动的外侧外骨骼对人提供助力,但是它的最 大的缺点就是笨重、不稳定且不安全。重 1500磅,30个自由度.1960年 图片来自 /~hpm/project.archi ve/Image.Archive/other.robots/Hardyman.jpg
下肢康复训练机器人研究进展
—
中国康复理论 与实践 2 1 年 8 第 l卷第 8 C iJ eaiTer PatA g2 1, o 1, o8 02 月 8 期 h R hblho rc u,02V 1 8N . n y , .
DOI 1 .9 9 . s . 0 —7 1 0 20 .0 : O 6  ̄ i n 1 6 9 7 . 1 .8 9 3 s 0 2 0
的 支 持 。 - 康 复 机 器 人 ( hblai b t 作 为 一 种 新 型 机 器 人 ,它 r ait o r os e itn o )
进运 动康 复和实现运动控制 ,自动化和机器人辅助 的运 动康复
从 上 世 纪 9 年代 开始 出现 。 0 下肢康复 机器人疗法 最初集 中在肌 肉的运动知觉 反馈上 , 后 来 扩 展 到 以功 能 电刺 激 和 虚 拟 现 实 为基 础 的 治 疗 系 统 。 第 一
效 加快 康复进程 ,提 高康 复疗效u 删。 早期的减重步行康复训练设备 ,借 助于跑步机 、悬 吊带等
帮 助 患 者 进 行 下 肢 运 动 训 练 。 此 类 产 品结 构 简 单 、价 格 便 宜 , 但 训 练 过 程 中必 须 有 专 业 人 员 的帮 助 ,而 且 随 意 性 较 强 ,不 符 合 人 体 的运 动 机 理 ,只 能用 于病 情 较 轻 的 患 者 。随 着 机 器 人 技
R nh o Amio 医疗 中 心 和 Me t nc 司 共 同开 发 。 尽 管 ac oL s gs dr i公 o 电极 的植 入会 导 致 感 染 等一 系列 问 题 ,总 体 来 说 植 入 型 足 下 垂 刺 激 器 仍 是 早 期 康 复 机 器 人 一 个 成 功 的 典 范 。
外骨骼康复机器人研究现状及关键技术
压磁式 力传感 器 压磁效应:一些铁磁材料在受到外力作用后
,其内部产生应力,引起铁磁材料磁导率变化 的现象。 特点:输出信号大,抗干扰性好,过载能力强
10
二、外骨骼机器人的关键技术
3、光电编码器
根据光电编码器的刻度方法及信号输出形式,可将其分为:增量式,绝对式和混合式三种 类型。 增量式:输出3路方波脉冲,A、B、Z相,
外骨骼机器人 相关传感器
光电编码器
力传感器 •
• • 定义:一种通过光电转换将输出轴上的 机械几何位移转换为脉冲或者数字量的 传感器 • 结构:由光栅盘和光电检测装置组成 •
定义:将力信号转变为电信号输 出的电子元件 结构:由力敏元件、转换元件和 电路组成 分类:弹性敏感元件 应变式力传感器 压阻式力传感器 压电式力传感器
Stelarc外骨骼是一款肌肉机器人, 外形与蜘蛛人类似,长有6条腿,直径 达到5米。它是一种混合人机,充气和 放气之后便可膨胀和收缩,与其他外骨 骼相比具有更高的灵活性。使用时,操 作人员需站在中间,控制机器朝着面部 方向移动。Stelarc外骨骼由流体肌肉传 动装置驱动,装有大量传感器。
2
一、外骨骼机器人的研究现状
8
二、外骨骼机器人的关键技术
1、sEMG传感器
表面肌电信号因不同的个体、肌肉而存在差异,但仍具有以下几点共性: sEMG信号是一种交流电
压信号,其幅值与肌力大致成 正比关系,肌肉松弛、紧张度 与sEMG电压幅度之间存在着 近似线性关系。 sEMG信号是一种微弱的电信 号,正常肌肉运动单元电位幅值 一般为100μ V-2mV,最高不超 过5mV,经叠加后的肌电信号幅 值范围为:2μ V-5mV。
脑控外骨骼系统:由美国密
歇根州大学神经力学实验室设计
下肢康复机器人与运动障碍康复研究进展

下肢康复机器人与运动障碍康复研究进展摘要:我国目前约有1.9亿下肢运动障碍患者、失能和半失能的老年人需要康复服务,但我国康复医疗资源有限,康复机器人的研究有利于缓解紧张的供求关系。
有效的康复训练是下肢运动障碍患者康复治疗中的重要环节,对改善患者的步行功能和平衡功能有重要意义,传统康复训练主要以理疗师一对一的训练方式进行,存在康复效果不一致、缺乏定量评估和劳动强度大等问题。
下肢康复机器人结合传统康复训练方法、计算机技术和人体生物力学等,有助于缓解我国医疗资源不足的窘境,也对我国康复医学的发展有重要意义。
因此,本文将下肢康复机器人和相关运动障碍康复手段的研究进展进行梳理总结。
关键词:下肢康复机器人;下肢运动障碍;脑卒中;文献综述Research Progress of Lower Limbs Rehabilitation Robot and Rehab ofDyskinesiaAbstract: Lower extremity rehabilitation robot is a research hotspot of rehabilitation medicine in recent years.Key words: Lower limbs rehabilitation robot; Dyskinesia; Stroke; Literature review随着我国进入老龄化社会,人口老龄化问题日益严重,2017年60岁以上老年人数已占我国总人口数的17.3%,预计2050年这个比例将会达到34.9%[1]。
目前约有1.9亿患有下肢运动障碍和失能老年人需要居家、社区和医院康复[2],且老年人护理工作占用了很大一部分医疗康复资源。
此外,脑卒中等脑血管疾病的致残率较高[3],人口老龄化使得因脑血管疾病而残疾的人数逐年增加,但是通过有效康复治疗能够改善患者的步行功能和平衡功能[4]。
因此,能够帮助失能老年人和残疾患者进行康复训练的下肢康复机器人是目前研究的热点。
移动式下肢外骨骼康复机器人机构设计和轨迹跟踪控制
研究内容和方法
本研究的主要内容包括
移动式下肢外骨骼康复机器人的机构设计、轨迹跟踪控制算法设计和实验验 证。
研究方法包括
理论建模、数值仿真、实验验证等。首先建立下肢外骨骼机器人的运动学模 型和动力学模型,然后设计基于神经网络的轨迹跟踪控制算法,最后进行实 验验证和数据分析。
针对下肢运动功能障碍患者,传统的康复训练方法存在一些限制和不足,而下肢 外骨骼机器人可以提供更加精准、高效的康复训练方案。
移动式下肢外骨骼康复机器人可以实现人体下肢运动的全方位辅助,提高患者的 康复效果和生活质量。
相关工作
国内外研究者已经开展了一些关于下肢外骨骼机器人的研究,主要集中在机构设 计、运动控制、传感器融合等方面。
源、传感器等部分。
数据采集
03
在患者进行康复训练的过程中,记录相关数据,包括步态周期
、步长、步高、关节角度等。
数据分析和结果展示
数据处理
对采集到的数据进行清洗、预处理和分析,提取关键指标, 如步态周期、步长、步高和关节角度等。
结果展示
通过图表和统计数据展示分析结果,包括患者步态特征的变 化趋势、康复训练对患者的效果评估等。
该研究成果不仅适用于康复领域,还可以应用于辅助行走、运动员训练等领域,具有广泛的应用前景 和市场价值。
07
参考文献
参考文献
基于生物学原理的设计
为了更好地适应人体下肢的运动生理特征,研究人员根据人体下肢的生物力学特性,设计 了一种基于生物学原理的移动式下肢外骨骼康复机器人机构。这种机构能够模拟人体行走 时的步态,并能够根据患者的运动状态和运动意图进行相应的调整。
人体下肢外骨骼康复机器人的研究

人体下肢外骨骼康复机器人的探究引言随着全球人口老龄化趋势的加剧,骨骼肌肉系统疾病与下肢功能障碍问题在人们生活中变得越来越突出。
为了援助患者恢复下肢功能,并提高其生活质量,科学家们致力于开发一种先进的康复技术。
人体下肢外骨骼康复机器人在这一领域中崭露头角,成为一种极具潜力的康复帮助工具。
本文将探讨现状、应用前景以及机器人技术的挑战。
1. 下肢外骨骼康复机器人的探究现状下肢外骨骼康复机器人是一种通过机器人技术将机械结构与人体下肢结合,实现康复治疗的帮助工具。
这种技术的进步可以追溯到上世纪六十时期早期,随着现代机器人技术的不息进步,下肢外骨骼康复机器人在功能、性能和安全性等方面都有了显著的改进。
现阶段,下肢外骨骼康复机器人的探究主要集中在三个方面:机械结构、动力系统和康复控制系统。
机械结构方面,探究人员通过对人体下肢生理特征的深度探究,设计了与人体骨骼结构相似的外骨骼骨架,以提供足够的支撑力和稳定性。
同时,接受轻质材料和模块化设计,使机器人更加舒适和灵活。
动力系统方面,目前主要接受液压、气压和电机等方式实现力与力矩的输出,并利用相关传感器实时监测人体肌肉力输出,以保持与人体行走协调。
康复控制系统方面,人体下肢外骨骼康复机器人通过传感器得到患者行走姿态和力度等重要信息,并接受先进的控制算法来协调机器人与人体的动作。
这种控制系统可以依据个体的需求进行自适应调整,如加强力气输入、改变步态模式等。
2. 人体下肢外骨骼康复机器人的应用前景人体下肢外骨骼康复机器人具有宽广的应用前景。
起首,它可以援助康复患者重新恢复行走能力,截肢患者可以恢复走路,下肢麻痹患者可以提高其行走速度和稳定性。
其次,对于行走工作环境极端困难的军事、消防和救援人员,该技术可以提供额外的力气和稳定性,缩减劳动强度和防止意外损害。
此外,人体下肢外骨骼康复机器人还可以在体育训练和娱乐活动中发挥重要作用,援助运动员提高效果和保卫身体。
3. 人体下肢外骨骼康复机器人技术面临的挑战尽管人体下肢外骨骼康复机器人在康复领域有着宽广的应用前景,但其技术仍面临多种挑战。
外骨骼机器人研究报告发展综
外骨骼机器人研究发展综述罗川摘要外骨骼机器人又称可穿戴机器人,是一种结合了人的智能和机械动力装置的机械能量的机器人。
外骨骼机器人融合了传感、控制、驱动、信息融合、移动计算等综合技术为作为操作者的人提供一种可穿戴的机械机构。
本文介绍了外骨骼机器人的发展历史以及国外研究现状,对外骨骼机器人的关键技术:机械结构设计,驱动单元,控制策略进行了研究,分析了其技术难点最后对其发展前景进行了说明。
关键词:外骨骼机器人关键技术目录引言31.发展历史及现状31.1国外发展历史现状31.2国发展历史现状82.关键技术分析92.1外骨骼机器人的结构设计92.2外骨骼机器人驱动单元102.3外骨骼机器人的控制策略113.外骨骼机器人技术难点分析134.前景展望154.1 外骨骼机器人的研究方向154.2外骨骼机器人技术的应用15引言现代机器人所具有的机械动力装置使得机器人可以轻易地完成很多艰苦的任务,比如举起、搬运沉重的负载等。
虽然现代机器人控制技术有了长足的发展,还远达不到人的智力水平,包括决策能力和对环境的感知能力。
与此同时,人类所具有的智能是任何生物和机械装置所无法比拟的,人所能完成的任务不受人的智能的约束,而仅受人的体能的限制。
因此,将人的智能与机器人所具有的强大的机械能量结合起来,综合为一个系统,将会带来前所未有的变化,这便是外骨骼机器人的设计思想。
外骨骼机器人实质上是一种可穿戴机器人,穿戴在操作者的身体外部,为操作者提供了诸如保护、身体支撑等功能,同时又融合了传感、控制、驱动、信息融合等机器人技术,使得外骨骼能够在操作者的控制下完成一定的功能和任务。
本文通过介绍外骨骼机器人的发展历史及研究现状进一步分析了外骨骼机器人的关键技术,并对其技术难点以及发展前景作了说明,以期在全面认识外骨骼机器人基础上对其开展进一步深入研究。
1.发展历史及现状1.1国外发展历史现状外骨骼系统的最早研究始于20世纪60年代。
1962年,美国空军就要求康奈尔航空实验室进行一项采用主从控制方式的人力放大器系统的可行性研究。
下肢康复外骨骼机器人研究

下肢康复外骨骼机器人研究摘要:康复是一种针对患有运动障碍或功能障碍的个体进行恢复和改善的治疗过程。
许多因素,如运动损伤、脑卒中、脊髓损伤和肌肉骨骼疾病,都可能导致患者丧失下肢功能。
康复领域面临着许多挑战,包括长期的治疗过程、康复效果的不确定性以及患者在康复训练中可能遇到的困难。
关键词:下肢康复;外骨骼机器人;研究引言在过去的几十年中,随着科技的进步,外骨骼机器人逐渐出现并得到了广泛的发展。
外骨骼机器人是一种结合了机械、电子和计算技术的装置,可以附着在患者的身体上,并通过传感器和运动控制系统来辅助或代替患者的肢体功能。
它们为下肢康复提供了全新的解决方案,可以帮助患者重建肌肉力量、改善步态和平衡,促进康复过程。
1. 外骨骼机器人技术原理1.1 机械结构与设计外骨骼机器人的机械结构和设计是其基础和核心。
机械结构主要由支撑骨架、关节和连接件组成,这些组件构成了一个与人体下肢相似的框架。
设计时需要考虑机器人的重量、稳定性、舒适度和便携性,以确保患者在佩戴外骨骼机器人时感到舒适且可以自由移动。
随着技术的进步,一些外骨骼机器人采用轻质材料,如碳纤维复合材料,以降低重量和提高强度。
同时,采用人体工程学原理来设计机械结构,使得外骨骼机器人与患者的身体形状更加匹配,减少不适感并提高运动效率。
1.2 传感技术与运动控制传感技术在外骨骼机器人中起着至关重要的作用,它能够实时感知患者的运动意图和姿态,从而准确地控制机器人的动作。
常见的传感器包括惯性测量单元(IMU)、压力传感器、表面肌电图(sEMG)传感器等。
IMU传感器可以测量机器人在空间中的运动和姿态,用于反馈患者的步态和平衡状态。
压力传感器可以监测脚底的接触力,帮助外骨骼机器人根据地面反馈调整支撑力度。
sEMG传感器用于测量肌肉的电活动,可以帮助机器人感知患者的运动意图,并实现与人体的协同运动。
运动控制是通过传感器获取的数据进行处理和计算,从而实现外骨骼机器人的动作控制。
简述下肢康复机器人的现状、关键技术及发展
效果,推动工作的快速发展。维护保养应在日常工作中惯以实 施,多留意多注意,这样能保证性能稳定的同时,延长彩超设 备的寿命。
参考文献 [1] 杨广宇.浅谈医疗机构对彩超的保养和检测[J].计量与测试技
术,2017,44(01):66-67. [2] 罗劲.彩超的日常保养与维修分析[J].科技风,2018,(24):165. [3] 朱爱丽.彩超的日常保养与维修[J].智慧健康,2017,3(24):7-8. [4] 李小波.医用彩超设备中主要维修技术的应用实践[J].中国高新
引言 肢体康复功能的治疗理念来自于运动疗法和神经重塑概
念。通过反复的运动训练,重新建立控制肢体运动的神经环路, 从而达到恢复肢体功能的目的。传统的康复治疗极其耗时耗力, 特别是下肢的康复训练,对治疗师造成极大的负担,进而更加难 以保证治疗的强度和时长。这一需求催生了自动化康复机器人, 并且在当今与未来,康复机器人都有快速的发展和增长。
训两方面予以改进。
参考文献 [1] 张洪彪.医院信息网络系统及其安全管理[J].科技创新导报,2016,
(20):93-94. [2] 徐卫华.医院信息网络系统安全管理的设计与应用[J].现代信息
科技,2017,(05):98-99.
(上接第140页)
的浸泡部分不能超过探头外壳侧面的方位标示处,探头浸泡时 间不要超过1小时。不能使用高温高压进行消毒,会导致探头内 部结构损坏。
陆瑾瑶 波科医疗器械技术(上海)有限公司 上海 200023
摘 要 对于有肢体功能障碍的人群而言,高强度且具有重复性和针对性的康复治疗是肢体康复的最有效手段。人 口的老龄化和康复治疗师的缺少,催生出了庞大的康复市场需求。在各个行业走向自动化、智能化的大背景下,机 器人在医疗康复行业的应用也越来越多。本文就下肢康复机器人的现状、其中的关键技术以及未来的发展进行概述 和分析,为下肢康复机器人的发展提供借鉴。 关键词 下肢康复机器人;康复训练;关键技术
下肢外骨骼机器人动力学分析及设计

下肢外骨骼机器人动力学分析及设计下肢外骨骼机器人是一种可穿戴的机器人装置,用于协助、增强下肢功能。
它可以帮助行动有困难的人恢复行走能力,并减少肌肉疲劳,预防康复训练中的二次损伤。
下肢外骨骼机器人的设计需要考虑动力学分析,以确保装置能够提供合适的力学支持和协助运动,本文将从动力学分析和设计两个方面进行详细介绍。
首先,动力学分析是下肢外骨骼机器人设计的重要一环。
在运动学分析的基础上,动力学分析主要包括对关节力矩、关节角加速度、节段质量和重心位置等参数的计算和优化。
通过动力学分析,可以确定下肢外骨骼机器人在不同动作状态下所需的力矩和力量,从而为后续的机械设计提供参数参考。
其次,下肢外骨骼机器人的设计需要考虑机械结构、驱动系统和传感器系统等方面。
机械结构设计需要根据人体运动学原理,确定骨骼装置的连接方式、关节设计和腿部外壳材料等,以确保其具备符合人体工学要求的功能和舒适度。
驱动系统设计中需要考虑驱动电机的选择和布局,以及驱动传动装置的设计,以确保机器人能够提供合适的力量和速度。
传感器系统设计中需要考虑使用压力传感器、角度传感器和力传感器等多种传感器,以获取人体运动状态和力矩变化,进一步改善驱动系统的性能。
此外,下肢外骨骼机器人的控制策略也是设计的重要一环。
控制策略应该根据动力学分析的结果,结合传感器获得的数据,实现合适的力量输出和动作控制,提供舒适的运动支持。
常见的控制策略包括基于位置、力矩和运动感知的控制方法,可以根据具体需求进行选择。
同时,控制系统还需要考虑实时性和稳定性,以提供适应性的支持。
总结起来,下肢外骨骼机器人的设计需要从动力学分析和设计两个方面综合考虑。
动力学分析可以提供关节力矩、关节角加速度、节段质量和重心位置等参数参考;设计方面需要考虑机械结构、驱动系统和传感器系统等要素,以提供合适的力学支持和动作控制。
通过综合考虑这些因素,可以设计出性能优异、舒适可靠的下肢外骨骼机器人,为行动不便的人群提供有效的康复支持。
下肢康复机器人在骨科患者康复治疗中的研究进展

下肢康复机器人在骨科患者康复治疗中的研究进展随着科技的飞速发展,医疗领域的创新也如雨后春笋般涌现。
其中,下肢康复机器人作为骨科患者康复治疗的重要辅助工具,正逐渐成为研究的热点。
它如同一位智能的“康复教练”,为患者提供个性化、精准化的康复训练方案,助力他们重获新生。
首先,下肢康复机器人在提高康复效率方面发挥着不可替代的作用。
传统的康复治疗往往依赖于医生和护士的手动操作,不仅耗时耗力,而且难以保证每次治疗的一致性。
而下肢康复机器人则能够根据患者的具体情况,自动调整训练强度和频率,确保每次治疗都能达到最佳效果。
这种高效、精准的治疗方式,无疑为骨科患者的康复之路铺平了道路。
其次,下肢康复机器人在减轻医护人员负担方面也表现出色。
在传统康复治疗中,医护人员需要长时间陪伴在患者身边,进行各种繁琐的操作。
这不仅增加了医护人员的工作强度,还可能因为疲劳而导致治疗效果的下降。
而下肢康复机器人则能够自动完成大部分治疗任务,让医护人员有更多的时间和精力去关注其他患者的需求,提高了整体医疗服务的效率。
然而,下肢康复机器人并非万能之药,其研究和应用仍面临诸多挑战。
例如,如何确保机器人的安全性和可靠性?如何让机器人更好地适应不同患者的个体差异?如何降低机器人的成本,使其更广泛地应用于临床实践?这些问题都需要我们深入思考和探讨。
此外,我们还应该关注下肢康复机器人对患者心理的影响。
对于许多骨科患者来说,康复过程不仅是身体的折磨,更是心灵的煎熬。
而下肢康复机器人的出现,无疑为他们带来了希望和勇气。
它像一位温柔的“心理医生”,通过智能交互和鼓励性反馈,帮助患者建立信心、克服恐惧,从而更积极地投入到康复治疗中。
展望未来,随着人工智能、大数据等技术的不断发展,下肢康复机器人将迎来更加广阔的应用前景。
我们有理由相信,这位“康复教练”将越来越聪明、越来越贴心,为更多骨科患者带来福音。
同时,我们也期待相关部门能够加大对这一领域的投入和支持,推动下肢康复机器人的研究和应用不断取得新的突破。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Wan DQ, Xu YM, Bai YH. Research and development of lower extremity rehabilitation exoskeletons.Zhongguo Zuzhi Gongcheng
Yanjiu yu Linchuang Kangfu. 2011;15(52): 9855-9858.
万大千,徐义明,白跃宏. 下肢外骨骼康复机器人的研究与进展[J].中国组织工程研究与临床康复,2011,15(52):9855-9858. [ ]
0 引言
外骨骼是指为生物提供保护和支持的坚硬 外部结构。外骨骼机器人是指具有可穿戴的坚 硬的外部结构的机器人。外骨骼机器人最先起 步于军事领域,军人通过穿戴外骨骼机器人提 高其军事作战能力,穿戴者可携载更多的武器 装备,提高防护水平,同时可克服任何障碍, 长时间高速前进,不会产生疲劳感。随着科学 技术的发展,外骨骼机器人已逐步应用于康复 医学领域。它是近年来发展起来的一种新的针 对运动神经系统损伤的康复治疗技术[1]。患者通 过穿戴外骨骼康复机器人,不但可以进行有效 的功能康复训练,而且可以通过自身肌电信号
万大千,等. 下肢外骨骼康复机器人的研究与进展
1 资料和方法
1.1 资料来源 由第一作者检索 1990/2008 PubMed 数据库(/PubMed)及万方数 据库()。英文检索词为 “exoskeletons robot,central nerve datraining,the man-machine integration interaction interface”,中文检索词为“外骨骼机器人, 中枢神经损伤,主被动康复训练,人机一体化交互接 口”。检索文献量总计 47 篇。 1.2 纳入标准 ①文章所述内容为医用下肢外骨骼康 复机器人。②同一领域选择近期发表或在权威杂志上发 表的文章。 1.3 排除标准 重复性研究。 1.4 数据的提取 计算机初检得到 47 篇文献,阅读标 题和摘要进行初筛,排除因研究目的与本文无关及内容 重复的研究 21 篇,共保留其中的 26 篇归纳总结。 1.5 质量评估 符合纳入标准的 26 篇文献中,文献 [1-13]探讨了外骨骼康复机器人研制的关键技术,文献 [14-21]探讨了平板减重训练对步态的影响,文献[22-24] 探讨了能源与动力技术及人工智能系统对机器人的影 响,文献[25-26]探讨了外骨骼康复机器人未来的发展趋 势。
本文结合国内外文献对外骨骼康复机器人 研制的关键技术和临床应用最新研究进展综述 如下。
上海交通大学附 属第六人民医院 康复医学科,上海 市 200233
万大千★,男, 1986 年生,黑龙 江省哈尔滨市人, 汉族,上海交通大 学医学院在读硕 士,主要从事神经 系统损伤康复治 疗的研究。 wdqwdq1986@
控制帮助患者早期下地行走,达到促进中枢神 经恢复、提高生活质量的目的。
外骨骼康复机器人作为国际机器人领域的 一个研究热点,其研制涵盖了康复医学、生物 力学、机械学、电子学、材料学、计算机科学 以及机器人学等诸多领域。近年来康复机器人 的研究主要集中在康复机械手、医院机器人系 统、智能轮椅、假肢和康复治疗机器人等几个 方面[2]。而传统机械学、传感技术、生物医学、 智能控制技术、计算机技术及新材料、新能源 技术的发展明显促进了外骨骼康复机器人技术 的高速发展[3]。
中国组织工程研究与临床康复 第 15 卷 第 52 期 2011–12–24 出版 Journal of Clinical Rehabilitative Tissue Engineering Research December 24, 2011 Vol.15, No.52
下肢外骨骼康复机器人的研究与进展*★
万大千,徐义明,白跃宏
Research and development of lower extremity rehabilitation exoskeletons
Wan Da-qian, Xu Yi-ming, Bai Yue-hong
Abstract BACKGROUND: How to improve the daily activity of patients with central nervous system injury caused by cerebrovascular diseases is the problem to be solved in rehabilitation medicine. The development of lower extremity rehabilitation exoskeletons may solve it. OBJECTIVE: To review the research and development of lower extremity rehabilitation exoskeletons in order to design and develop them. METHODS: An online search of literatures published between January 1990 to December 2008 of lower extremity rehabilitation exoskeletons was performed in PubMed database (/PubMed) and Wanfang database () with the key words of “exoskeletons robots, central nerve damage, passive rehabilitation training, the man-machine integration interaction interface” in English and in Chinese. The repetitive studies were excluded. RESULTS AND CONCLUSION: Totally 26 articles were chosen to summarize. There are amount of studies on rehabilitation exoskeletons. However, if small volume, light, low power consumption, high power output can be solved in the rehabilitation exoskeletons, while they also have the abilities of fast response, low inertia, high precision and high security, the maximum response function of lower limb of nerve damage patients may be achieved.
Department of Rehabilitation Medicine, the Sixth People’s Hospital Affiliated to Shanghai Jiao Tong University, Shanghai 200233, China
Wan Da-qian★, Studying for master’s degree, the Sixth People’s Hospital Affiliated to Shanghai Jiao Tong University, Shanghai 200233, China wdqwdq1986@
的驱动元件,包括电池和马达,以及控制器等较重的周 边设备都布置在手推车中,这样既减轻操作者的负担, 又保证了行走平衡。而哈尔滨工程大学研制的康复机器 人[6],引入 sEMG 实现人机交互。根据患者意图实现康 复训练动作,由于脑卒中患者多为单侧受损,其利用健 侧 sEMG 驱动康复机器人辅助患者的患侧肢体进行康 复训练。这有助于保持患者正确的运动感觉,同时提供 了一个较好的人机交互接口。但是 sEMG 信号容易被电 磁噪声污损,而且为了精确测量,sEMG 需要用特殊的 胶粘接在皮肤表面,因而 sEMG 被认为不适合在人们的 日常生活中作为操作外骨骼装置的接口[7]。 2.1.2 平板减重与步态分析 平板康复训练可以显著 改善脊髓损伤和脑损伤造成的下肢长期瘫痪,其功能性 步行评定及站立平衡功能训练比传统康复治疗前后有 显著的改善,脑血管病脑卒中偏瘫患者早期在传统的康 复治疗基础上应用减重步行训练,能更大程度提高下肢 运动功能、步行能力及日常生活能力[8]。瑞士的联邦技 术大学、Hocoma AG 公司和德国神经康复训练中心分 别开发了外骨骼系统 Locomat 和 Hapticwalker。这些系 统结合活动平板训练模式,改变传统卒中或者截瘫患者 人工康复训练模式,减轻了体疗师的工作强度,保证了 康复训练的质量,提高了训练效果。Locomat 系统中还 加入了人工智能系统,不仅帮助患者进行标准步态康复 训练,还可以根据不同患者对标准步态抵触情况实时修 正步态,实现人机之间的协调康复训练。随着科学技术 的进步,平板减重训练完美应用于下肢外骨骼康复机器 人对神经损伤患者的肌肉力量和运动协调性恢复训练 有着极大地帮助。人类步态是一种典型的重复性功能运 动,减重平板训练为脊髓损伤患者或脑卒中患者的康复 训练起到了很好的作用[9]。研究表明,减重平板训练可 以改善患者的下肢肌力及运动协调性[10-11]。尤其对于轻 度偏瘫患者,减重平板训练可以显著改善患者的平衡能 力、步行速度、步长和双腿支撑站立时间,促进下肢运 动功能恢复[12]。
2 结果
2.1 外骨骼康复机器人研制关键技术 2.1.1 人机一体化交互接口(表面肌电信号) 人机一 体化交互接口是指人与机械系统之间的信息交互方式, 机器人是典型的人-机交互系统。机器通过检测表面肌 电信号(surface electromyogram,sEMG)来了解使用者 的情况,人也是根据机器人的运动情况对自己进行调 整,而机器是通过人机交互接口来了解人的情况,从而 确定机器的运动,人也是通过人机交互接口来了解机器 的运行情况。在正常生理状况下,人体肌肉收缩是伴随 着电位信号的产生,肌肉信号产生 sEMG 来完成一个简 单或复杂的动作[4]。而这简单或复杂运动又离不开控制 系统,有关机器人的控制和运动系统的研究进展国内外 已有部分文献报道。如韩国 Sogang 大学的 Intelligent Walking Assistive Robot,在控制方面,他们采用类似 于 sEMG 的肌纤维收缩信号,利用绑在大腿和小腿上的 气囊内气体的变化测得压力变化[5]。而在人体下肢自由 摆动,即肌纤维不收缩时,则利用关节处的电位计式角 度传感器的信号变化触发驱动器的动作。传感器信号的 融合和处理是通过便携式计算机中的模糊控制来实现 的。该机器人由两个部分组成:外骨骼和手推车。所有