第 章 直接线性变换解法
(1)线性变换

m
i
=0
则
∴
T( ∑ k i x i ) = ∑ k i (Tx i ) = T(0) = 0
i =1 i =1
{Txi } 线性相关。
线性变换的矩阵表示 将抽象的线性变换转化为具体的矩阵形式。 设 T 是线性空间 V n 的一个线性变换,且 {x1 , x 2 , , x n } 是 V 的一个基, ∀x ∈ V n,存在唯一的坐标表示
H ⎡ u1 ⎤ ⎢ H⎥ u H U 0 U 0 = ⎢ 2 ⎥ [ u1 ⎢ ⎥ ⎢ H⎥ ⎣ un ⎦
u2
H un u2
对 A 进行酉相似变换:
H ⎡ u1 ⎤ ⎢ H⎥ u H U0 AU0 = ⎢ 2 ⎥ A [ u1 ⎢ ⎥ ⎢ H⎥ ⎣ un ⎦
u2
un ] = uiH Au j
(
)
n×n
3 实对称矩阵与厄米矩阵 实对称 矩阵: 厄 米 矩阵: 实反对称矩阵: 反 厄米 矩阵: 实矩阵 A 复矩阵 A 实矩阵 A 复矩阵 A
AT = A
AH = A
AT = −A
AH = −A
4. 正交矩阵和酉矩阵 正交矩阵:实矩阵 A 酉矩阵:复矩阵 A
A T A = AA T = I
A H A = AA H = I
( A −1 = A T ) ( A −1 = A H )
正交相似变换和酉相似变换
P 为正交矩阵, A 为实矩阵, P −1 AP 为对 A 的正交相似变换;
P 为酉矩阵, A 为复矩阵, P −1 AP 为对 A 的酉相似变换。
5. 正规矩阵 实矩阵 A ,若满足 A T A = AA T ,则 A 为实正规矩阵; 复矩阵 A ,若满足 A H A = AA H ,则 A 为复正规矩阵。 显然,实对称矩阵、实反对称矩阵、正交矩阵均 为实正规矩阵; 厄米矩阵、 反厄米矩阵、 酉矩阵均为复正规矩阵。
第 4 讲 线性变换
������,(������1+������2)������ = ������1������ +������2 ������。
CQU
11
线性变换的定义
(5) 线性变换的数乘������������: ∀������ ∈ ������, ������������)������ = ������(������������ 。 (6) 线性变换的乘积������1������2: ∀������ ∈ ������, ������1������2)������ = ������1(������2������ (7) 逆变换������−1: ∀������ ∈ ������,若存在线性变换S使得(������������)������ ≡ ������, 则称S为T的逆变换������ = ������−1。 (8) 线性变换的多项式:
下面讨论线性变换的一些运算。
CQU
10
线性变换的定义
二、线性变换的运算
(1) 恒等变换������������ :∀������ ∈ ������, ������������������ = ������。
(2) 零变换������0:∀������ ∈ ������, ������0������ = 0。
CQU
6
线性变换的定义
① ������(������) = ������(0������) = 0(������������) = ������ ② ������(−������) = (−1)(������������) = −(������������) ③ 元素组������1, ������2, ⋯ , ������������线性相关,即存在一组不全为零的
=
线性变换考研知识点总结

线性变换考研知识点总结一、线性变换的基本概念1.1 线性空间线性空间是指一个集合V,其上有两种运算:向量的加法和数乘,满足一定的性质,即:(1)对于任意u,v∈V,有u+v∈V;(2)对于任意k∈F(其中F是一个字段),有ku∈V;(3)满足加法交换律、结合律、分配律和单位元存在。
1.2 线性变换的定义设V和W是两个线性空间,若存在一个映射T: V→W,满足以下条件:(1)对于任意u,v∈V,有T(u+v) = T(u) + T(v);(2)对于任意k∈F和任意u∈V,有T(ku) = kT(u)。
则称T为从V到W的线性变换。
1.3 线性变换的矩阵表示设V是n维线性空间,B = {v1, v2, ..., vn}是V的一组基,W是m维线性空间,C = {w1, w2, ..., wm}是W的一组基。
若T: V→W是一个线性变换,则存在一个m×n的矩阵A,使得对于任意u∈V,都有T(u)在基C下的坐标向量等于A乘以u在基B下的坐标向量。
1.4 线性变换的性质(1)零变换:对于任意线性空间V,零变换T:V→V定义为T(u) = 0,对于任意u∈V都有T(u) = 0。
(2)恒等变换:对于任意线性空间V和其基B,存在一个单位矩阵I使得对于任意u∈V 都有I(u) = u。
二、线性变换的基本定理2.1 线性变换的核与值域(1)核:对于线性变换T: V→W,其核Ker(T)定义为Ker(T) = {u∈V | T(u) = 0},即T的所有零空间。
(2)值域:对于线性变换T: V→W,其值域Im(T)定义为Im(T) = {T(u) | u∈V},即T所有可能的输出向量。
2.2 线性变换的满射与单射(1)满射:若线性变换T: V→W的值域等于W,即Im(T) = W,则称T是满射的。
(2)单射:若对于任意非零向量u,若T(u)≠0,则称T是单射的。
2.3 线性变换的秩和零度若线性变换T: V→W,则其秩rank(T)等于T的值域Im(T)的维数;零度nullity(T)等于T 的核Ker(T)的维数。
线性变换

§2.2 线性变换的矩阵
1.设 ε 1 , ε 2 ,L , ε n 是线性空间 的一组基,T 为V . 是线性空间V的一组基 的一组基,
的线性变换. 的线性变换 则对任意 ξ ∈ V 存在惟一的一组数
x1 , x2 ,L , xn ∈ P , 使 ξ = x1ε 1 + x2ε 2 + L + xnε n
则有
y1 x1 y2 x2 M = A M . y x n n
证:由已知有
σ ( ε 1 , ε 2 ,L , ε n ) = ( ε 1 , ε 2 ,L , ε n ) A,
x1 x2 ξ=( ε 1 , 2 ,L , ε n ) , ε M x n y1 y2 σ (ξ ) = ( ε 1 , 2 ,L , ε n ) . ε M y n
用矩阵表示即为
T ( ε 1 , ε 2 ,L , ε n ) = ( T ε 1 , T ε 2 ,L , T ε n ) = ( ε 1 , ε 2 ,L , ε n ) A
其中
α11 α 21 A= L α n1
L L L α n 2 L α nn
α12 L α1n α 22 L α 2 n ,
ε 于是, 于是,σ (η1 ,η 2 ,L ,η n ) = σ ( ε 1 , 2 ,L , ε n ) X
= ( ε 1 , 2 ,L , ε n ) AX = (η1 ,η2 ,L ,η n ) X - 1 AX . ε
由此即得
B= X - 1 AX .
为线性空间V一组基 一组基, 例. 设 ε 1 , ε 2为线性空间 一组基, 线性变换 σ 在
第讲线性变换
第讲线性变换第2讲线性变换内容:1. 线性变换2. 线性变换的矩阵表⽰,特征值与特征向量3. 线性变换的值域、核及不变⼦空间线性空间是某类客观事物从量的⽅⾯的⼀个抽象,线性空间V 中⾃⾝到⾃⾝的⼀种线性映射称为V 的⼀个线性变换,线性变换研究线性空间中元素之间的最基本联系.介绍线性变换的基本概念并讨论它与矩阵之间的联系.§1 线性变换 1 线性变换定义1.1 设V 是数域P 上的线性空间,T 是V 到⾃⾝V 的⼀个映射,即对于V 中的任意元素x 均存在唯⼀的V y ∈与之对应,则称T 为V 的⼀个变换或算⼦,记为y x T =)(,称y 为x 在变换T 下的象,x 为y 的原象.若映射T 还满⾜:)()()(y lT x kT ly kx T +=+,P l k V y x ∈∈?,,,,称T 为V 的线性变换.例1.1 ⼆维实向量空间?=∈=2,1,212i R R i ξξξ,将其绕原点旋转θ⾓的操作就是⼀个线性变换.证明:=21ξξx , ??==21)(ηηx T y , +=-=θξθξηθξθξηcos sin sin cos 212211 , 22121cos sin sin cos R ∈??-=ξξθθθθηη。
可见该操作T 为变换,下⾯证明其为线性变换.22121,R z z z x x x ∈==?,R l k ∈,,++=+=+22112121lz kx lz kx lz lz kx kx lz kx , )()(cos sin sin cos cos sin sin cos cos sin sin cos )(21212211z lT x kT z z l x x k lz kx lz kx ly kx T +=-+??-=??++-=+θθθθθθθθθθθθ,所以, T 是线性变换. 2 ⼏种常⽤的线性变换1)单位变换把线性空间V 的任⼀向量都变为其⾃⾝的变换称为单位变换或恒等变换,记为 e T ,即:V x x x T e ∈?=,)(.2)零变换把线性空间V 中的任⼀向量都变为零向量的变换称为零变换,记为 0T ,即V x x T ∈?=,0)(0.3)变换相等如果1T ,2T 是V 的两个变换,V x ∈?,均有)()(21x T x T =,则称变换1T 与2T 相等,记为21T T =.4)满秩(线性)变换若(线性)变换T 将所有的线性⽆关元素组仍变换为线性⽆关的元素组,则称之为满秩(线性)变换.5)变换的和21T T +,V x ∈?,)()())((2121x T x T x T T +=+,则21T T T +=.6)变换的数乘kT :V x ∈?,)())((x kT x kT =. 7)负变换:)())((x T x T -=-.8)变换的乘积21T T :V x ∈?,))(())((2121x T T x T T =. 9)逆变换1-T :V x ∈?,若存在变换S 使得x x ST ≡))((,则称S 为T 的逆变换1-=T S .10)变换的多项式:nn T TT T =,并规定e T T =0; ∑==Nn nn ta t f 0)( → ∑==Nn nn T a T f 0)( →)())((0∑==Nn n n x T a x T f .说明:变换的乘积不满⾜交换律;只有满秩变换才有逆变换,e T ST =. 3 线性变换的性质1)线性变换把零元素仍变为零元素 2)负元素的象为原来元素的象的负元素3)线性变换把线性相关的元素组仍变为线性相关的元素组.注意,线性⽆关的元素组经过线性变换不⼀定是线性⽆关的,变换后的情况与元素组和线性变换有关. §2 线性变换的矩阵表⽰、特征值与特征向量有限维线性空间的任⼀元素(向量)都可由基元素(向量)唯⼀线性表⽰,元素(向量)可以⽤坐标表⽰出来,通过坐标把线性变换⽤矩阵表⽰出来,从⽽可把⽐较抽象的线性变换转化为具体的矩阵来处理. 1 线性变换的矩阵表⽰设T 是线性空间n V 的⼀个线性变换,且},,,{21n x x x 是n V 的⼀个基,nV x ∈?,则存在唯⼀的坐标表⽰==∑=n n ni i i x x x x x ξξξξ 21211][,有)()(2211n n x x x T x T ξξξ+++==n n x T x T x T ξξξ 2121)]()()([=n n x x x T ξξξ 2121)(,要确定线性变换T ,只需确定基元素在该变换下的象就可以了.定义2.1 设=ni i i n i a a a x x x x T 2121][)(,A x x x a a a a a a a a a x x x x x x T n nn n n n n n n ][][),,,(212122221112112121 =?=,对于任意元素x ,在该基下,变换后)(x T 的坐标表⽰为=n n x x x x T ηηη 2121][)(,即[]==n n n n A x x x x x x T x T ξξξξξξ 21212 121,,,),,,()(,可知:=n n A ξξξηηη 2121,即:n x ξξξ 21,n A x T ξξξ 21)(,把A 称为T 在基},,,{21n x x x 下的矩阵表⽰.定理2.1 设},,,{21n x x x 是n V 的⼀个基,1T 、2T 在该基下的矩阵分别为A 、B .则有(1))]([])[(212121B A x x x x x x T T n n +=+(2))]([])[(21211kA x x x x x x kT n n =(3))]([])[(212121AB x x x x x x T T n n =(4)121211][][--=A x x x x x x T n n推论 2.1 设i mi i t a t f ∑==0)(为纯量t 的m 次多项式,T 为线性空间n V 的⼀个线性变换,且在n V 的基},,,{21n x x x 下的矩阵表⽰为A ,则)(][])[(2121A f x x x x x x T f n n =,其中i mi i A a A f ∑==0)(,I A =0.推论 2.2 设线性变换T 在n V 的基},,,{21n x x x 下的矩阵表⽰为A ,元素x 在该基下的坐标为),,,(21n ξξξ,则)(x T 在该基下的坐标),,,(21n ηηη满⾜=n n A ξξξηηη 2121 .定理2.2 设T 在n V 的两个基},,,{21n x x x 及},,,{21n y y y 的矩阵分别为A 和B ,且C x x x y y y n n ][][2121=,则AC C B 1-=.即A 和B 相似,记为B A ~.线性变换在不同基下的矩阵是相似的;反之,如果两个矩阵相似,那么它们可以看成同⼀个线性变换在两组不同基下的矩阵.定理 2.3 n 阶⽅阵A 和B 相似的充要条件是A 和B 为同⼀线性变换在不同基下的矩阵表⽰. 2 特征值与特征向量定义2.2 设T 是数域P 上线性空间V 中的线性变换.如果对于数域P 中某⼀数λ,存在⾮零向量α,使得λαα=)(T . (1)则称λ为T 的⼀个特征值,⽽α称为T 的对应于特征值λ的⼀个特征向量.式(1)表明,在⼏何上,特征向量α的⽅位,经过线性变换后保持不变.特征向量不是被特征值惟⼀确定;但是,特征值却被特征向量惟⼀确定.设n x x x ,,,21 是线性空间n V 的基,线性变换T 在该基下的矩阵表⽰是)(ij a A =.令0λ是T 的特征值,属于0λ的特征向量nn x x x x ξξξ+++= 2211,则由式(1)知)(x T 及x 0λ的坐标分别是n A ξξξ 21,n ξξξλ 210,有n A ξξξ 21=n ξξξλ 210,即 ()0210=-n A E ξξξλ , (2)由于0≠x ,因此,n ξξξ,,,21 不全为零,从⽽就有()0det 0212220211121100=---------=-nnn n n n a a a a a a a a a A E λλλλ定义2.3 设)(ij a A =是数域P 上的n 阶矩阵,λ是参数,称A的特征矩阵AE -λ的⾏列式())(det 212222111211λ?λλλλ=---------=-nnn n nna a a a a a a a a A E为矩阵A的特征多项式.它是P 上的⼀个n 次多项式.()λ?的根(或零点) 0λ,即()0=λ?,称为A 的特征值(根);⽽相应于⽅程组(2)的⾮零解向量()T n ξξξ,,,21 称为A 的属于特征值0λ的特征向量.说明:如果0λ是线性变换的特征值,那么0λ必定是矩阵A 的特征多项式()()A E -=λλ?det 的⼀个根;反之,如果0λ是()λ?在数域P 中的⼀个根,即有()()0det 00=-=A E λλ?,那么齐次线性⽅程组(2)就有⾮零解.于是⾮零向量n n x x x x ξξξ+++= 2211就满⾜式(1),从⽽0λ是T 的特征值,x 是T 的属于0λ的特征向量.所以,欲求线性变换T 的特征值和特征向量,只要求出T 的矩阵A 的特征值和特征向量就⾏了.换⾔之,T 的特征值与A 的特征值相⼀致,⽽T 的特征向量在n V 的基下的坐标(列向量)与A 的特征向量相⼀致.因此,计算特征值和特征向量的步骤如下:第⼀步:取定数域P 上的线性空间n V 的⼀个基,写出线性变换T 在该基下的矩阵A ;第⼆步:求出A 的特征多项式()λ?在数域P 上的全部根,它们就是T 的全部特征值;第三步:把求得的特征值逐个代⼊⽅程组(2),解出矩阵A 属于每个特征值的全部线性⽆关的特征向量.第四步:以A 的属于每个特征值的特征向量为n V 中取定基下的坐标,即得T 的相应特征向量.例 2.1 设线性变换T 在3V 的基321,,x x x 下的矩阵是=122212221A ,求T 的特征值和特征向量.解容易算出A 的特征多项式是()()=-=A E λλ?det ()()511222122212-+=---------λλλλλ.因此,T 的特征值是1λ=⼀1(⼆重特征值)和2λ=5.特征⽅程()01=-x A E λ的⼀个基础解系为:T )1,0,1(-,T )1,1,0(- ,T 的属于1λ的两个线性⽆关的特征向量为311x x y -=,322x x y -=,T 的属于1λ的全体特征向量为:2211y k y k + ,(P k k ∈21,不同时为零);特征⽅程()02=-x A E λ的⼀个基础解系为T )1,1,1(,记3213x x x y ++=,则T 的属于2λ的全体特征向量为:33y k ,(P k ∈3不等于零).定理 2.4 对于线性空间n V 的线性变换T 的任⼀特征值0λ,T 的属于0λ的全部特征向量,再添上零向量所构成的集合{}n V x x x T x V ∈==,)(00λλ是n V 的⼀个线性⼦空间.事实上,设0,λV y x ∈,则有x x T 0)(λ=,y y T 0)(λ=;于是:()()y x y x y T x T y x T +=+=+=+000)()(λλλ,()()()()kx x k Tx k kx T 00λλ===,这就是说明y x +与kx 均属于0λV .§3 线性变换的值域、核及不变⼦空间 1 线性变换的值域和核定义3.1 设数域P 上的线性空间n V 和m V ,T 是 n V 到mV 的⼀个线性映射,T 的全体像组成的集合称为T 的值域,⽤)(T R 表⽰,也称为T 的像空间,记为n TV ,即(){}m n n V V T TV T R ?∈==αα)(;所有被T 变成零元素(零向量)的元素(向量)构成的集合称为T 的核,记为)ker(T 或)0(1-T ,有时也称)ker(T 为T 的零空间,记为)(T N ,即(){}n n V V T T T N ?∈===ααα,0)()ker(.当T 是线性变换时,称)(T R 和)(T N 分别为线性变换T 的值域和核.可以证明,)(T R 和)(T N 分别是m V 和n V 的线性⼦空间.定义3.2 称)(T R 的维数)(dim T R 为线性变换T 的秩,记为)(T r ;称)(T N 的维数)(dim T N 称为线性变换T 的零度,记为)(T null .例3.1 设Ax x T =)(,=100011011A ,求T 的值域和核.解令 {}Tx x x x A A A A ),,(,,,321321==,(){}()31332211,A A span A x A x A x T R =++=,其中()()TTA A 1,0,0;0,1,131==.满⾜0=Ax 的()αk x T=-=0,1,1,故}{)(αspan T N =.2 线性变换的不变⼦空间定义3.3 如果T 是线性空间V 的线性变换,1V 是V 的⼦空间,并且对于任意⼀个1V x ∈,都有1)(V x T ∈,则称1V 是T 的不变⼦空间.定义3.4 以m C 表⽰全体m 维复向量在复数域C 上构成的线性空间,A 为n m ?复矩阵,其列(向量)为n ααα,,,21 .显然,m i C ∈α,n i ,,2,1 =.⼦空间),,,(21n span ααα称为矩阵A 的列空间(值域),记作)(A R ,即),,,()(21n span A R ααα =.记),,,(21n A ααα =,()nTn C y y y y ∈=,,,21 .则)(A R 可表成{}nC y Ay A R ∈=)(.显然,A 的秩等于A 的值域的维数,即)(dim )(A R A rank =.定义 3.5 设A 为n m ?复矩阵,称线性⽅程组0=Ax 在复数域上的解空间为A的化零空间(核),记作)(A N ,即}0{)(==Ax x A N .显然,)(A N 是n C 的⼀个⼦空间,称)(A N 的维数为A 的零度,即)(dim )(A N A null =.定理3.1 (1)n V T N T R dim )(dim )(dim =+ (2))()(dim A rank A R =(3)n A N A R =+)(dim )(dim ,n 为A 的列数.例3.2 设-=311211A ,求)(A null .解由0=Ax 解得()T k x 2,1,5-=,故1)(=A null .定理3.2 设A 为n m ?矩阵,则n A null A rank =+)()(.证明因为齐次线性⽅程组0=Ax 的解空间的维数(基础解系包含的线性⽆关向量的个数)为)(A rank n -,故上式成⽴.下⾯给出怎样利⽤不变⼦空间的概念将线性变换的矩阵简化为简单的准对⾓矩阵或对⾓矩阵.假设{}k S ααα,,,21~=是T 的不变⼦空间W 的⼀个基,可以将~S 扩充为V 的⼀个基{}n k k S ααααα,,,,,,121 +=.T 是V 上的⼀个线性变换.对S 中的每个基向量()W T j j ∈αα,,可以表⽰成()()()()nnn k n k k kn n n nnk k k k k kk k k kkk k k kk a a a a T a a a a T a k a T a a T αααααααααααααααα+++++=+++++=++=++=+++++++++ 11111111111111111111线性变换T 在基S 下的矩阵是=++++++nn nk n k k k kn kk kkk n k k a a a a a a a a a a a a A1111111111110000, A 可以分块写成=221211A A A A . 定理 3.3 如果V V V =⊕21,并且1V ,2V 是T 的两个不变⼦空间,即()11V V T ?,()22V V T ?.则线性变换T 的矩阵为准对⾓形=22110A A A . 特别地,若所有i V 都是⼀维⼦空间时,则矩阵A 简化为对⾓矩阵()==n n a a a a a a diag A 2121,,,. 定理 3.4 设T 是线性空间n V 的线性变换,n λλλ,,,21 是T 的全部不同的特征值,则T 在某⼀基下的矩阵为对⾓矩阵的充分必要条件是n V V V n =+++λλλdim dim dim 21 .可知,线性变换T 的矩阵简化为⼀个准对⾓矩阵(或对⾓矩阵)与线性空间n V 可分解为若⼲个不变⼦空间的直和是相当的.。
第四节 线 性 变 换
性质 4 线性变换 T 的像集 T(Vn) 是一个线
性空间(Vn 的子空间),称为线性变换 T 的像空间.
设 T( V ), 则有 (V 则有 ,使 , 2 证明 设 证明 1 , 2 1n, 2 T 1 n,), 2 V n1 ,T T = 21 ,, T2 = 2 , 性质 5T 使 T 0 的全体 1= 1= 2 1=
其中
(i 1,2, , n) ,
定义 Rn 中的变换 y = T(x) 为 T(x) = Ax ( x Rn ) ,
则 T 是线性变换. 这是因为
设 a, b Rn , 则
T(a + b) = A(a + b) = Aa +Ab = T(a) + T(b);
T(ka) = A(ka) = kAa = kT(a).
就是像集.
定义 5 设 Vn,Um 分别是数域上的 n 维
和 m 维线性空间, T 是一个从 Vn 到 Um 的变换, 如果变换 T 满足 (i) 任给 1 , 2 Vn, (从而 1 + 2 Vn ), 有 T(1 + 2 ) = T(1) + T(2) ; (ii) 任给 Vn , k R, (从而 k Vn ),有
性质 2 T若 ) = k) + · · k 1 , 则 (- =k T (T (+ ) = =1 (T 1 (·+ )) = =m T T ( ). ) = - T( 1 11 2 2T m(
证毕 设对 . 当m=1 证明 用归纳法证 . , 结论显然 当 m = 1 ,;结论显然 证明 用归纳法证
T(k ) = kT( ) .
那么, T 就称为从 Vn 到 Um 的线性变换.
一线性变换(4-5)

的线性变换,
有
下的表示矩阵。
解法一:直接法(同例1)
解法二:利用同一线性变换在不同基下的表示矩阵是相 似矩阵这一结论。
选取一组简单基: 基 到基的过渡矩阵为
基
在T下的象为:
T在基
下的表示矩阵为:
则T在基
下的表示矩阵为:
三、线性变换的特征值与特征向量 定义 设T是n维线性空间V的一个线性变换,对于 数 ,如果存在非零向量 ,使得, 则称 是T的特征值, 的特征向量,简称特征向量。 是T的属于
例1、试确定在多项式空间Pn [x]上的求导运算T 分别在下列两组基下的表示矩阵
说明:同一线性变换在不同基下的表示矩阵一般 是不同的,它们之间的关系是相似矩阵。
相似矩阵
定理:T在基
从基
证明 下的矩阵为A, 在基
下的矩阵为B,
到基
的过渡矩阵为P,则
再由
线性无关可得: 从而有
设
如果存在可逆矩阵P,使得
定理 n阶矩阵A的任一特征值的几何重复度不大于 代数重复度。
定理
n阶矩阵A的任一特征值的几何重复度不大于代数重复度。
证明 设A是线性空间C n的线性变换T在某组基下的表示 矩阵, m i , n i是特征值 的代数重复度与几何重复 度,对于特征子空间W,存在补空间V,使得 取W与V的一组基,不妨记做 则T在此基下的表示矩阵为
(3) 存在零变换o,
(4) 存在负变换-T,
(5) 第一分配律
(6) 第二分配律
(7) 结合律
(8) 令
表示n维线性空间V的所有线性变换的集合,则
在线性变换的加法与数乘运算下构成数域F上的 一个 维线性空间。
设 性变换的积,
《高等代数》线性变换PPT课件
x 1
A
x2
.
x n
综合上面所述, 我们得到坐标变换公式:
定理7.3.1 令V是数域F上一个n 维向量空间,σ是 V的一个线性变换,而σ关于V的一个基
{1,2, ,的n 矩}阵是
a11
A
a21
a12
a22
a1n a2n
an1 an2 ann
如果V中向量ξ关于这个基的坐标是 (x1,x2, ,xn,) 而σ(ξ)的坐标是 (y1,y2, ,yn),
例1 对于 R 2 的每一向量x1,x2定义
x 1 ,x 1 x 2 ,x 1 x 2 R 3
σ是 R 2到 R 3的一个映射,我们证明,σ是一个线
性映射.
例2 令H是V 3 中经过原点的一个平面.对于 V 3 的每一
向量ξ,令 表示 向量ξ在平面H上的正射影.根据射 影的性质, : 是到V 3 的V一3 个线性映射.
x1
( 1,
2
,
,
n
)
x2
.
xn
因为σ是线性变换,所以
() x1(1)x2(2)xn(n)
(2)
x1
((1),(2),,(n))
x2
.
xn
将(1)代入(2)得
x1
(
)
(1,2
,,
n
)
A
x2
.
xn
最后,等式表明,( )关 ( 1 , 于 2 , n )的坐标所组成
定理7.1.2 设V和W是数域F向量空间,而是一个线性
射,那么
:VW
(i) σ是满射 Im)(W
(ii) σ是单射 K(e )r{0}
第讲 线性变换

第2讲 线性变换内容:1. 线性变换2. 线性变换的矩阵表示,特征值与特征向量3. 线性变换的值域、核及不变子空间线性空间是某类客观事物从量的方面的一个抽象,线性空间V 中自身到自身的一种线性映射称为V 的一个线性变换,线性变换研究线性空间中元素之间的最基本联系.介绍线性变换的基本概念并讨论它与矩阵之间的联系.§1 线性变换 1 线性变换定义1.1 设V 是数域P 上的线性空间,T 是V 到自身V 的一个映射,即对于V 中的任意元素x 均存在唯一的V y ∈与之对应,则称T 为V 的一个变换或算子,记为y x T =)(,称y 为x 在变换T 下的象,x 为y 的原象.若映射T 还满足:)()()(y lT x kT ly kx T +=+,P l k V y x ∈∈∀,,,,称T 为V 的线性变换.例1.1 二维实向量空间⎭⎬⎫⎩⎨⎧=∈⎥⎦⎤⎢⎣⎡=2,1,212i R R i ξξξ,将其绕原点旋转θ角的操作就是一个线性变换.证明: ⎥⎦⎤⎢⎣⎡=21ξξx , ⎥⎦⎤⎢⎣⎡==21)(ηηx T y , ⎩⎨⎧+=-=θξθξηθξθξηcos sin sin cos 212211 , 22121cos sin sin cos R ∈⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡ξξθθθθηη。
可见该操作T 为变换,下面证明其为线性变换.22121,R z z z x x x ∈⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=∀,R l k ∈,,⎥⎦⎤⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+22112121lz kx lz kx lz lz kx kx lz kx , )()(cos sin sin cos cos sin sin cos cos sin sin cos )(21212211z lT x kT z z l x x k lz kx lz kx ly kx T +=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡-=+θθθθθθθθθθθθ, 所以, T 是线性变换. 2 几种常用的线性变换1)单位变换把线性空间V 的任一向量都变为其自身的变换称为单位变换或恒等变换,记为 e T ,即:V x x x T e ∈∀=,)(.2)零变换把线性空间V 中的任一向量都变为零向量的变换称为零变换,记为 0T ,即V x x T ∈∀=,0)(0.3)变换相等如果1T ,2T 是V 的两个变换,V x ∈∀,均有)()(21x T x T =,则称变换1T 与2T 相等,记为21T T =.4)满秩(线性)变换若(线性)变换T 将所有的线性无关元素组仍变换为线性无关的元素组,则称之为满秩(线性)变换.5) 变换的和21T T +,V x ∈∀,)()())((2121x T x T x T T +=+,则21T T T +=.6) 变换的数乘kT :V x ∈∀,)())((x kT x kT =. 7) 负变换:)())((x T x T -=-.8) 变换的乘积21T T :V x ∈∀,))(())((2121x T T x T T =. 9) 逆变换1-T :V x ∈∀,若存在变换S 使得x x ST ≡))((,则称S 为T 的逆变换1-=T S .10) 变换的多项式:nn T TT T =,并规定e T T =0; ∑==Nn nn ta t f 0)( → ∑==Nn nn T a T f 0)( →)())((0∑==Nn n n x T a x T f .说明:变换的乘积不满足交换律;只有满秩变换才有逆变换,e T ST =. 3 线性变换的性质1)线性变换把零元素仍变为零元素 2)负元素的象为原来元素的象的负元素3)线性变换把线性相关的元素组仍变为线性相关的元素组.注意,线性无关的元素组经过线性变换不一定是线性无关的,变换后的情况与元素组和线性变换有关. §2 线性变换的矩阵表示、特征值与特征向量有限维线性空间的任一元素(向量)都可由基元素(向量)唯一线性表示,元素(向量)可以用坐标表示出来,通过坐标把线性变换用矩阵表示出来,从而可把比较抽象的线性变换转化为具体的矩阵来处理. 1 线性变换的矩阵表示设T 是线性空间n V 的一个线性变换,且},,,{21n x x x 是n V 的一个基,nV x ∈∀,则存在唯一的坐标表示⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==∑=n n ni i i x x x x x ξξξξ 21211][,有)()(2211n n x x x T x T ξξξ+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n n x T x T x T ξξξ 2121)]()()([⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n n x x x T ξξξ 2121)(,要确定线性变换T ,只需确定基元素在该变换下的象就可以了.定义2.1 设⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=ni i i n i a a a x x x x T 2121][)(,A x x x a a a a a a a a a x x x x x x T n nn n n n n n n ][][),,,(212122221112112121 =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,对于任意元素x ,在该基下,变换后)(x T 的坐标表示为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n n x x x x T ηηη 2121][)(,即[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n n n n A x x x x x x T x T ξξξξξξ 21212121,,,),,,()(,可知:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n n A ξξξηηη 2121,即: ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡↔n x ξξξ 21,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡↔n A x T ξξξ 21)(,把A 称为T 在基},,,{21n x x x 下的矩阵表示.定理2.1 设},,,{21n x x x 是n V 的一个基,1T 、2T 在该基下的矩阵分别为A 、B .则有 (1))]([])[(212121B A x x x x x x T T n n +=+(2))]([])[(21211kA x x x x x x kT n n =(3))]([])[(212121AB x x x x x x T T n n =(4)121211][][--=A x x x x x x T n n推论 2.1 设i mi i t a t f ∑==0)(为纯量t 的m 次多项式,T 为线性空间n V 的一个线性变换,且在n V 的基},,,{21n x x x 下的矩阵表示为A ,则)(][])[(2121A f x x x x x x T f n n =,其中i mi i A a A f ∑==0)(,I A =0.推论 2.2 设线性变换T 在n V 的基},,,{21n x x x 下的矩阵表示为A ,元素x 在该基下的坐标为),,,(21n ξξξ ,则)(x T 在该基下的坐标),,,(21n ηηη 满足 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n n A ξξξηηη 2121 . 定理2.2 设T 在n V 的两个基},,,{21n x x x 及},,,{21n y y y 的矩阵分别为A 和B ,且C x x x y y y n n ][][2121=,则AC C B 1-=.即A 和B 相似,记为B A ~.线性变换在不同基下的矩阵是相似的;反之,如果两个矩阵相似,那么它们可以看成同一个线性变换在两组不同基下的矩阵.定理 2.3 n 阶方阵A 和B 相似的充要条件是A 和B 为同一线性变换在不同基下的矩阵表示. 2 特征值与特征向量定义2.2 设T 是数域P 上线性空间V 中的线性变换.如果对于数域P 中某一数λ,存在非零向量α,使得λαα=)(T . (1)则称λ为T 的一个特征值,而α称为T 的对应于特征值λ的一个特征向量.式(1)表明,在几何上,特征向量α的方位,经过线性变换后保持不变.特征向量不是被特征值惟一确定;但是,特征值却被特征向量惟一确定.设n x x x ,,,21 是线性空间n V 的基,线性变换T 在该基下的矩阵表示是)(ij a A =.令0λ是T 的特征值,属于0λ的特征向量nn x x x x ξξξ+++= 2211,则由式(1)知)(x T 及x 0λ的坐标分别是⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n A ξξξ 21,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n ξξξλ 210,有⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n A ξξξ 21=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n ξξξλ 210,即 ()0210=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-n A E ξξξλ , (2)由于0≠x ,因此,n ξξξ,,,21 不全为零,从而就有()0det 0212220211121100=---------=-nnn n n n a a a a a a a a a A E λλλλ定义2.3 设)(ij a A =是数域P 上的n 阶矩阵,λ是参数,称A的特征矩阵AE -λ的行列式())(det 212222111211λϕλλλλ=---------=-nnn n nna a a a a a a a a A E为矩阵A的特征多项式.它是P 上的一个n 次多项式.()λϕ的根(或零点) 0λ,即()0=λϕ,称为A 的特征值(根);而相应于方程组(2)的非零解向量()T n ξξξ,,,21 称为A 的属于特征值0λ的特征向量.说明:如果0λ是线性变换的特征值,那么0λ必定是矩阵A 的特征多项式()()A E -=λλϕdet 的一个根;反之,如果0λ是()λϕ在数域P 中的一个根,即有()()0det 00=-=A E λλϕ,那么齐次线性方程组(2)就有非零解.于是非零向量n n x x x x ξξξ+++= 2211就满足式(1),从而0λ是T 的特征值,x 是T 的属于0λ的特征向量.所以,欲求线性变换T 的特征值和特征向量,只要求出T 的矩阵A 的特征值和特征向量就行了.换言之,T 的特征值与A 的特征值相一致,而T 的特征向量在n V 的基下的坐标(列向量)与A 的特征向量相一致.因此,计算特征值和特征向量的步骤如下:第一步:取定数域P 上的线性空间n V 的一个基,写出线性变换T 在该基下的矩阵A ;第二步:求出A 的特征多项式()λϕ在数域P 上的全部根,它们就是T 的全部特征值;第三步:把求得的特征值逐个代入方程组(2),解出矩阵A 属于每个特征值的全部线性无关的特征向量.第四步:以A 的属于每个特征值的特征向量为n V 中取定基下的坐标,即得T 的相应特征向量.例 2.1 设线性变换T 在3V 的基321,,x x x 下的矩阵是⎪⎪⎪⎭⎫⎝⎛=122212221A ,求T 的特征值和特征向量. 解 容易算出A 的特征多项式是()()=-=A E λλϕdet ()()511222122212-+=---------λλλλλ.因此,T 的特征值是1λ=一1(二重特征值)和2λ=5.特征方程()01=-x A E λ的一个基础解系为:T )1,0,1(-,T )1,1,0(- ,T 的属于1λ的两个线性无关的特征向量为311x x y -=,322x x y -=,T 的属于1λ的全体特征向量为:2211y k y k + ,(P k k ∈21,不同时为零);特征方程()02=-x A E λ的一个基础解系为T )1,1,1(,记3213x x x y ++=,则T 的属于2λ的全体特征向量为:33y k ,(P k ∈3不等于零).定理 2.4 对于线性空间n V 的线性变换T 的任一特征值0λ,T 的属于0λ的全部特征向量,再添上零向量所构成的集合{}n V x x x T x V ∈==,)(00λλ是n V 的一个线性子空间.事实上,设0,λV y x ∈,则有x x T 0)(λ=,y y T 0)(λ=;于是:()()y x y x y T x T y x T +=+=+=+000)()(λλλ,()()()()kx x k Tx k kx T 00λλ===,这就是说明y x +与kx 均属于0λV .§3 线性变换的值域、核及不变子空间 1 线性变换的值域和核定义3.1 设数域P 上的线性空间n V 和m V ,T 是 n V 到mV 的一个线性映射,T 的全体像组成的集合称为T 的值域,用)(T R 表示,也称为T 的像空间,记为n TV ,即(){}m n n V V T TV T R ⊂∈==αα)(;所有被T 变成零元素(零向量)的元素(向量)构成的集合称为T 的核,记为)ker(T 或)0(1-T ,有时也称)ker(T 为T 的零空间,记为)(T N ,即(){}n n V V T T T N ⊂∈===ααα,0)()ker(.当T 是线性变换时,称)(T R 和)(T N 分别为线性变换T 的值域和核.可以证明,)(T R 和)(T N 分别是m V 和n V 的线性子空间. 定义3.2 称)(T R 的维数)(dim T R 为线性变换T 的秩,记为)(T r ;称)(T N 的维数)(dim T N 称为线性变换T 的零度,记为)(T null .例3.1 设Ax x T =)(,⎪⎪⎪⎭⎫ ⎝⎛=100011011A ,求T 的值域和核.解 令 {}Tx x x x A A A A ),,(,,,321321==,(){}()31332211,A A span A x A x A x T R =++=,其中()()TTA A 1,0,0;0,1,131==.满足0=Ax 的()αk x T=-=0,1,1,故}{)(αspan T N =.2 线性变换的不变子空间定义3.3 如果T 是线性空间V 的线性变换,1V 是V 的子空间,并且对于任意一个1V x ∈,都有1)(V x T ∈,则称1V 是T 的不变子空间.定义3.4 以m C 表示全体m 维复向量在复数域C 上构成的线性空间,A 为n m ⨯复矩阵,其列(向量)为n ααα,,,21 .显然,m i C ∈α,n i ,,2,1 =.子空间),,,(21n span ααα 称为矩阵A 的列空间(值域),记作)(A R ,即),,,()(21n span A R ααα =.记),,,(21n A ααα =,()nTn C y y y y ∈=,,,21 .则)(A R 可表成{}nC y Ay A R ∈=)(.显然,A 的秩等于A 的值域的维数,即)(dim )(A R A rank =. 定义 3.5 设A 为n m ⨯复矩阵,称线性方程组0=Ax 在复数域上的解空间为A的化零空间(核),记作)(A N ,即}0{)(==Ax x A N .显然,)(A N 是n C 的一个子空间,称)(A N 的维数为A 的零度,即)(dim )(A N A null =.定理3.1 (1)n V T N T R dim )(dim )(dim =+ (2))()(dim A rank A R =(3)n A N A R =+)(dim )(dim ,n 为A 的列数.例3.2 设⎪⎪⎭⎫⎝⎛-=311211A ,求)(A null . 解 由0=Ax 解得()T k x 2,1,5-=,故1)(=A null . 定理3.2 设A 为n m ⨯矩阵,则n A null A rank =+)()(. 证明 因为齐次线性方程组0=Ax 的解空间的维数(基础解系包含的线性无关向量的个数)为)(A rank n -,故上式成立.下面给出怎样利用不变子空间的概念将线性变换的矩阵简化为简单的准对角矩阵或对角矩阵.假设{}k S ααα,,,21~=是T 的不变子空间W 的一个基,可以将~S 扩充为V 的一个基{}n k k S ααααα,,,,,,121 +=.T 是V 上的一个线性变换.对S 中的每个基向量()W T j j ∈αα,,可以表示成()()()()nnn k n k k kn n n nnk k k k k kk k k kkk k k kk a a a a T a a a a T a k a T a a T αααααααααααααααα+++++=+++++=++=++=+++++++++11111111111111111111线性变换T 在基S 下的矩阵是⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=++++++nn nk n k k k kn kk kkk n k k a a a a a a a a a a a a A1111111111110000, A 可以分块写成⎪⎪⎭⎫ ⎝⎛=221211A A A A . 定理 3.3 如果V V V =⊕21,并且1V ,2V 是T 的两个不变子空间,即()11V V T ⊆,()22V V T ⊆.则线性变换T 的矩阵为准对角形⎪⎪⎭⎫ ⎝⎛=22110A A A . 特别地,若所有i V 都是一维子空间时,则矩阵A 简化为对角矩阵()⎪⎪⎪⎪⎪⎭⎫⎝⎛==n n a a a a a a diag A 2121,,,. 定理 3.4 设T 是线性空间n V 的线性变换,n λλλ,,,21 是T 的全部不同的特征值,则T 在某一基下的矩阵为对角矩阵的充分必要条件是n V V V n =+++λλλdim dim dim 21 .可知,线性变换T 的矩阵简化为一个准对角矩阵(或对角矩阵)与线性空间n V 可分解为若干个不变子空间的直和是相当的.。
高等代数线性变换分解

则h(A) = f(A)+g(A), p(A) = f(A)g(A)。特别地, f(A)g(A)=g(A)f(A),
线性变换 (1) (2) (3) (4)
§1 线性变换的定义
例1 判断下列所定义的变换 A 是否为线性变换。 在线性空间V中,A x = x+a,a为V中一固定向量; 在线性空间V中,A x = a,a为V中一固定向量; 在P [x]中,A f (x) = f (x+1) ; 在P [x]中,A f (x) = f (x0),x0为P中一固定数;
线性变换
Байду номын сангаас
§2 线性变换的运算
四、线性变换的多项式
线性变换的幂 设 A∈L(V),由于线性变换的乘法满足结合律,
因此对任意取定的正整数n,n个A 的乘积AA…A是一个确定的
线性变换,记为: An。
-n -1 n 0
若A是可逆的,定义A = (A ) 。对任意的A∈L(V),定义A =E。
根据线性变换幂的定义,其指数运算规律为:
例2 在P 3中,下面定义的变换 A 是否为线性变换。 (1) A( x1 , x2 , x3 ) ( x1 x2 , x2 x3 , x3 x1 ) (2) A( x1 , x2 , x3 ) (1, x1 x2 x3 ,1) (3) A( x1 , x2 , x3 ) (0, x1 x2 x3 , 0)
2 ) (4) A( x1, x2 , x3 ) ( x12 , x2 x3 , x3
线性变换
§1 线性变换的定义
二、线性变换的性质
性质1 设 A 是V的线性变换,则 A (0) 0, A ( ) A ( )
性质2 线性变换保持线性组合与线性关系式不变。
第7章线性变换(第1讲)
第7章线性变换(第1讲)目标与要求理解线性变换的概念,了解几个特殊线性变换;掌握线性变换的加法、数量乘法、乘法、逆变换、多项式的定义及其运算性质,并会计算具体问题.重点难点重点:理解线性变换的概念,掌握线性变换的运算及其运算性质,并会计算具体问题.难点:理解线性变换的概念,掌握线性变换的运算.设计安排循序渐进逐一给出线性变换的定义、线性变换的线性运算、线性变换的乘法、逆变换及线性变换的多项式的概念与运算性质,以示例的讲解加深对概念的理解.教学进程见幻灯片部分.(3学时)黑板与多媒体讲授相结合.教学内容§1 线性变换的定义一、线性变换的定义线性空间V到自身的映射称为V的一个变换.α,和数定义1 线性空间V的一个变换A称为线性变换,如果对于V中任意的元素β域P中任意数k,都有α+)=A (α)+A (β);A (βk)=A k(α). (1)A(α一般用花体拉丁字母A,B,…表示V的线性变换,A(α)或Aα代表元素α在变换A下的像.定义中等式(1)所表示的性质,有时也说成线性变换保持向量的加法与数量乘法(或保持线性运算).例 1.平面上的向量构成实数域上的二维线性空间.把平面围绕坐标原点按反时钟方向旋转θ角,就是一个线性变换,用ℐθ表示.如果平面上一个向量α在直角坐标系下的坐标是),(y x ,那么像ℐθ(α)的坐标,即α旋转θ角之后的坐标),(y x ''是按照公式⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛''y x y x θθθθcos sin sin cos . 来计算的.同样空间中绕轴的旋转也是一个线性变换.例2 设α是几何空间中一固定非零向量,把每个向量ξ变到它在α上的内射影的变换也是一个线性变换,以α∏表示它.用公式表示就是αααξαξα),(),()(=∏. 这里),(),,(ααξα表示内积. 例3 线性空间V 中的恒等变换或称单位变换E ,即E )()(V ∈=ααα 以及零变换ℴ,即ℴ)(0)(V ∈=αα 都是线性变换.例4 设V 是数域P 上的线性空间,k 是P 中的某个数,定义V 的变换如下:K :V k ∈→ααα,.这是一个线性变换,称为由数k 决定的数乘变换,可用K 表示.显然当1=k 时,便得恒等变换,当0=k 时,便得零变换.例5 在线性空间][x P 或者n x P ][中,求微商是一个线性变换.这个变换通常用D 代表,即D ()(x f )=)(x f '.例6 定义在闭区间[]b a ,上的全体连续函数组成实数域上一线性空间,以),(b a C 代表.在这个空间中变换ℐ()(x f )=⎰x a dt t f )(是一线性变换.二、线性变换的简单性质1. 设A 是V 的线性变换,则A (0)=0, A (α-)=-A (α).2. 线性变换保持线性组合与线性关系式不变.换句话说,如果β是r ααα,,,21 的线性组合:r r k k k αααβ+++= 2211,那么经过线性变换A 之后,A (β)是A (1α),A (2α),…, A (r α)同样的线性组合:A (β)=1k A (1α)+2k A (2α)+…+ r k A (r α)又如果r ααα,,,21 之间有一线性关系式02211=+++r r k k k ααα那么它们的像之间也有同样的关系式1k A (1α)+2k A (2α)+…+ r k A (r α)=0.3. 线性变换把线性相关的向量组变成线性相关的向量组.§2 线性变换的运算一、线性变换的乘法设A,B 是线性空间V 的两个线性变换,定义它们的乘积为.(AB)(α)= A(B (α)) (V ∈α).则线性变换的乘积也是线性变换.线性变换的乘法适合结合律,即(AB)C=A(BC).但线性变换的乘法不适合交换律.例如,在实数域上的线性空间中,线性变换D ()(x f )=)(x f '.ℐ()(x f )=⎰x a dt t f )(的乘积D ℐ=ℰ,但一般ℐD ≠ℰ.对于任意线性变换A ,都有 A ℰ=ℰA = A.二、线性变换的加法设A,B 是线性空间V 的两个线性变换,定义它们的和A+B 为(A+B)(α)= A (α)+B (α) (V ∈α).则线性变换的和还是线性变换.线性变换的加法适合结合律与交换律,即A+(B+C)=(A+B)+C.A+B=B+A.对于加法,零变换ℴ与所有线性变换A 的和仍等于A :A+ℴ=A.对于每个线性变换A ,可以定义它的负变换(-A ):(-A)(α)=- A (α) (V ∈α).则负变换(-A )也是线性变换,且A+(-A )=ℴ.线性变换的乘法对加法有左右分配律,即A(B+C)=AB+AC ,(B+C)A=BA+CA.三、线性变换的数量乘法数域P 中的数与线性变换A 的数量乘法定义为k A =KA即k A(α)=K(A (α))=KA (α),当然A 还是线性变换.线性变换的数量乘法适合以下的规律:)(kl A=k (l A),)(l k +A=k A+l A,k (A+B)=k A+k B,1A=A.线性空间V 上全体线性变换,对于如上定义的加法与数量乘法,也构成数域P 上一个线性空间.V 的变换A 称为可逆的,如果有V 的变换B 存在,使 AB=BA=E.这时,变换B 称为A 的逆变换,记为A 1-.如果线性变换A 是可逆的,那么它的逆变换A 1-也是线性变换.既然线性变换的乘法满足结合律,当若干个线性变换A 重复相乘时,其最终结果是完全确定的,与乘法的结合方法无关.因此当n 个(n 是正整数)线性变换A 相乘时,就可以用个n A AA来表示,称为A 的n 次幂,简记为A n .作为定义,令 A 0= E.根据线性变换幂的定义,可以推出指数法则:A n m +=A m A n ,(A m )n =A mn )0,(≥n m 当线性变换A 可逆时,定义A 的负整数幂为A n -=(A 1-)n (n 是正整数).值得注意的是,线性变换乘积的指数法则不成立,即一般说来(AB)n ≠A n B n .设011)(a x a x a x f m m m m +++=-- 是][x P 中一多项式,A 是V 的一个线性变换,定义f (A)=m a A m +1-m a A 1-m +…+0a E显然f (A)是一线性变换,它称为线性变换A 的多项式.不难验证,如果在][x P 中,)()()(,)()()(x g x f x p x g x f x h =+=那么h (A)=f ( A)+g ( A), p (A)=f ( A)g ( A).特别地, f (A)g ( A)=g ( A)f ( A).即同一个线性变换的多项式的乘法是可交换的.例1 在三维几何空间中,对于某一向量α的内射影α∏是一个线性变换. α∏可以用下面的公式来表示: αααξαξα),(),()(=∏.其中),(),,(ααξα表示向量的内积.不难看出,ζ在以α为法向量的平面x 上的内射影)(ζx ∏可以用公式)()(ζζζα∏-=∏x表示.因此 =∏x ℰ-α∏.这里ℰ是恒等变换.ζ对于平面x 的反射ℛx 也是一个线性变换,它的像由公式ℛ)(2)(ζζζα∏-=x给出.因此 ℛx =ℰ-2α∏.设βα,是空间的两个向量.显然,α与β互相垂直的充要条件为=∏⋅∏βαℴ例2 在线性空间n P ][λ中,求微商是一个线性变换,用D 表示.显然有D =n ℴ.其次,变换的平移P a a f f ∈+→)()(λλ也是一个线性变换,用ℐa 表示.根据泰勒展开式)()!1()(!2)()()()1(12λλλλλ---++''+'+=+n n f n a f a f a f a f ,因之ℐa 实质上是D 的多项式:ℐa =ℰ+a D+!22a D 2+…+)!1(1--n a n D 1-n .备注通过补充例题达到使学生吸收消化重点内容的目的.思考:线性变换满足什么条件,才能将线性无关的向量组变为线性无关的向量组?(可逆变换)作业布置课后相应习题.第7章 线性变换(第2讲)目标与要求理解线性变换的矩阵定义;熟悉线性变换的运算与矩阵运算的关系;掌握线性变换在不同基下矩阵的关系及相似矩阵的概念和性质.重点难点重点:理解线性变换的矩阵的概念,掌握线性变换的运算与矩阵运算的关系及线性变换在不同基下矩阵的关系及相似矩阵的概念和性质.难点:理解线性变换的运算与矩阵运算的关系,掌握线性变换在不同基下矩阵的关系及相似矩阵的性质.设计安排首先给出线性空间中线性线性变换的矩阵的定义,其次讨论线性变换的运算与矩阵运算的关系最后指明线性变换在不同基下矩阵的关系及相似矩阵的概念和性质:若A ~B ,则(i) |A |= |B |;(ii) A m ~B m ;(iii) kA ~kB ;(iv) 对 f (x )ÎP[x],有f (A )~f ( B );(v) 若A 可逆,则A –1~ B –1;(vi) r (A )=r (B );(vii) B 1= X -1A 1X , B 2= X -1A 2X , 则B 1 +B 2 = X -1(A 1+ A 2)X , B 1B 2 = X -1A 1A 2X .教学进程见幻灯片部分.(3课时) 黑板与多媒体讲授相结合.教学内容§3 线性变换和矩阵一、线性变换关于基的矩阵设V 是数域P 上n 维线性空间.n εεε,,,21 V 的一组基,现在建立线性变换与矩阵关系.空间V 中任意一个向量ξ可以被基n εεε,,,21 线性表出,即有关系式n n x x x εεεξ+++= 2211 (1)其中系数是唯一确定的,它们就是ξ在这组基下的坐标.由于线性变换保持线性关系不变,因而在ξ的像A ξ与基的像A 1ε,A 2ε,…,A n ε之间也必然有相同的关系:A ξ=A (n n x x x εεε+++ 2211)=1x A(1ε)+2x A(2ε)+…+n x A (n ε) (2)上式表明,如果知道了基n εεε,,,21 的像,那么线性空间中任意一个向量ξ的像也就知道了,或者说1. 设n εεε,,,21 是线性空间V 的一组基,如果线性变换Å与ℬ在这组基上的作用相同,即A i ε=B i ε, ,,,2,1n i =那么A= B.结论1的意义就是,一个线性变换完全被它在一组基上的作用所决定.下面指出,基向量的像却完全可以是任意的,也就是2. 设n εεε,,,21 是线性空间V 的一组基,对于任意一组向量n ααα,,,21 一定有一个线性变换Å使 A i ε=i α .,,2,1n i =定理 1 设n εεε,,,21 是线性空间V 的一组基,n ααα,,,21 是V 中任意n 个向量.存在唯一的线性变换Å使 A i ε=i α .,,2,1n i =定义2 设n εεε,,,21 是数域P 上n 维线性空间V 的一组基,A 是V 中的一个线性变换.基向量的像可以被基线性表出:⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=.,,22112222112212211111n nn n n n n n n n a a a A a a a A a a a A εεεεεεεεεεεε 用矩阵表示就是A (n εεε,,,21 )=(A(1ε),A Å(2ε),…, A(n ε))=A n ),,,(21εεε (5) 其中⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=nn n n n n a a a a a a a a a A 212222111211 矩阵A 称为线性变换A 在基n εεε,,,21 下的矩阵.例1 设m εεε,,,21 是n )(m n >维线性空间V 的子空间W 的一组基,把它扩充为V 的一组基n εεε,,,21 .指定线性变换A 如下⎩⎨⎧+====.,,1,0,,,2,1,n m i A m i A ii i εεε 如此确定的线性变换A 称为子空间W 的一个投影.不难证明A 2=A投影A 在基n εεε,,,21 下的矩阵是⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00111 这样,在取定一组基之后,就建立了由数域P 上的n 维线性空间V 的线性变换到数域P 上的n n ⨯矩阵的一个映射.前面结论1说明这个映射是单射,结论2说明这个映射是满射.换句话说,在这二者之间建立了一个双射.这个对应的重要性表现在它保持运算,即有定理2 设n εεε,,,21 是数域P 上n 维线性空间V 的一组基,在这组基下,每个线性变换按公式(5)对应一个n n ⨯矩阵,这个对应具有以下性质:1)线性变换的和对应于矩阵的和;2)线性变换的乘积对应于矩阵的乘积;3)线性变换的数量乘积对应于矩阵的数量乘积;4)可逆的线性变换与可逆矩阵对应,且逆变换对应于逆矩阵.定理 2 说明数域P 上n 维线性空间V 的全体线性变换组成的集合)(V L 对于线性变换的加法与数量乘法构成P 上一个线性空间,与数域P 上n 级方阵构成的线性空间n n P ⨯同构.定理3 设线性变换A 在基n εεε,,,21 下的矩阵是A ,向量ξ在基n εεε,,,21 下的坐标是),,,(21n x x x ,则A ξ在基n εεε,,,21 下的坐标),,,(21n y y y 可以按公式⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x A y y y 2121 计算.二、同一个线性变换在不同基下的矩阵的关系线性变换的矩阵是与空间中一组基联系在一起的.一般说来,随着基的改变,同一个线性变换就有不同的矩阵.为了利用矩阵来研究线性变换,有必要弄清楚线性变换的矩阵是如何随着基的改变而改变的.定理4 设线性空间V 中线性变换A 在两组基n εεε,,,21 , (6) n ηηη,,,21 (7) 下的矩阵分别为A 和B 从基(6)到(7)的过渡矩阵是X ,于是AX X B 1-=.定理4 告诉我们,同一个线性变换A 在不同基下的矩阵之间的关系.定义 3 设A ,B 为数域P 上两个n 级方阵,如果可以找到数域P 上的n 级可逆方阵X ,使得AX X B 1-=,就说A 相似于B ,记作B A ~.相似是矩阵之间的一种关系,这种关系具有下面三个性质:1. 反身性:A A ~2. 对称性:如果B A ~,那么A B ~.3. 传递性:如果B A ~,C B ~,那么C A ~.定理5 线性变换在不同基下所对应的矩阵是相似的;反过来,如果两个矩阵相似,那么它们可以看作同一个线性变换在两组基下所对应的矩阵.矩阵的相似对于运算有下面的性质.如果X A X B 111-=,X A X B 212-=,那么X A A X B B )(21121+=+-, X A A X B B )(21121-=由此可知,如果AX X B 1-=,且)(x f 是数域P 上一多项式,那么X A f X B f )()(1-=利用矩阵相似的这个性质可以简化矩阵的计算.例2 设V 是数域P 上一个二维线性空间,21,εε是一组基,线性变换A 在21,εε下的矩阵是⎪⎪⎭⎫ ⎝⎛-0112计算A 在V 的另一组基21,ηη下的矩阵,这里⎪⎪⎭⎫ ⎝⎛--=2111),(),(2121εεηη备注补充例题,加深对有关概念、结论的理解.归纳解题思路方法,给学生留出时间做练习.作业布置课后相应习题.第7章 线性变换(第3讲)目标与要求理解线性变换的特征值和特征向量的概念,熟练掌握特征值和特征向量的求法; 掌握特征值和特征向量的性质,并能利用性质进行相关计算;了解特征子空间的概念,理解哈密顿-凯莱定理,掌握其简单应用(计算A 的逆及A 的幂).重点难点重点:理解线性变换的特征值和特征向量的概念,熟练掌握特征值和特征向量的求法;掌握特征值和特征向量的性质,并能利用性质进行相关计算;理解哈密顿-凯莱定理并掌握其简单应用.难点:理解线性变换的特征值和特征向量的概念,掌握特征值和特征向量的性质,理解哈密顿-凯莱定理.设计安排首先给出理线性变换的特征值和特征向量的概念,通过分析得到特征值和特征向量的求法;以示例(见幻灯片例1~4)加深对概念的理解和方法的掌握;其次讨论特征值和特征向量的性质;最后介绍了哈密顿-凯莱定理并举例说明其简单应用(计算A 的逆及A 的幂),教学进程见幻灯片部分.(3课时)黑板与多媒体讲授相结合.教学内容§4 特征值与特征向量一、线性变换的特征值和特征向量的概念定义4 设A 是数域P 上线性空间V 的一个线性变换,如果对于数域P 中一数0λ,存在一个非零向量ξ,使得A ξ=0λξ. (1)那么0λ称为A 的一个特征值,而ξ叫做A 的属于特征值0λ的一个特征向量.从几何上来看,特征向量的方向经过线性变换后,保持在同一条直线上,这时或者方向不变)0(0>λ或者方向相反)0(0<λ,至于)0(0=λ时,特征向量就被线性变换变成0.如果ξ是线性变换A 的属于特征值0λ的特征向量,那么ξ的任何一个非零倍数ξk 也是A 的属于特征值0λ的特征向量.这说明特征向量不是被特征值所唯一决定的.相反,特征值却是被特征向量所唯一决定的,因为,一个特征向量只能属于一个特征值.二、特征值与特征向量的求法设V 是数域P 上n 维线性空间,n εεε,,,21 是它的一组基,线性变换A 在这组基下的矩阵是A .设0λ是特征值,它的一个特征向量ξ在n εεε,,,21 下的坐标是n x x x 00201,,, ,则A ξ的坐标是⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n x x x A 00201 . ξλ0的坐标是⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n x x x 002010 λ 因此(1)式相当于坐标之间的等式⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x x x x A 00201000201 λ (2) 或0)(002010=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-n x x x A E λ 这说明特征向量ξ的坐标),,,(00201n x x x 满足齐次方程组⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++,,,02211202222121101212111n n nn n n n n n n x x a x a x a x x a x a x a x x a x a x a λλλ 即⎪⎪⎩⎪⎪⎨⎧=-+---=---+-=----,0)(,0)(,0)(022112222012112121110n nn n n n n n n x a x a x a x a x a x a x a x a x a λλλ (3) 由于0≠ξ,所以它的坐标n x x x 00201,,, 不全为零,即齐次方程组有非零解.而齐次方程组有非零解的充要条件是它的系数行列式为零,即00212220211121100=---------=-nnn n n n a a a a a a a a a A E λλλλ. 定义5 设A 是数域P 上一个n 级矩阵,λ是一个数字.矩阵A E -λ的行列式.212222111211nnn n n na a a a a a a a a A E ---------=-λλλλ(4) 叫做矩阵A 的特征多项式,这是数域P 上的一个n 次多项式.上面的分析说明,如果0λ是线性变换A 的特征值,那么0λ一定是矩阵A 的特征多项式的一个根;反过来,如果0λ是矩阵A 的特征多项式在数域P 中的一个根,即00=-A E λ,那么齐次方程组(3)就有非零解.这时,如果),,,(00201n x x x 是方程组(3)的一个非零解,那么非零向量)0202101n n x x x εεεξ+++=满足(1),即0λ是线性变换A 的一个特征值,ξ就是属于特征值0λ的一个特征向量.因此确定一个线性变换A 的一个特征值与特征向量的方法可以分成以下几步:1.在线性空间V 中取一组基n εεε,,,21 ,写出A 在这组基下的矩阵A ;2.求出A 的特征多项式A E -0λ在数域P 中全部的根,它们也就是线性变换A 的全部特征值;3.把所求得的特征值逐个地代入方程组(3),对于每一个特征值,解方程组(3),求出一组基础解系,它们就是属于这个特征值的几个线性无关的特征向量在基n εεε,,,21 下的坐标,这样,也就求出了属于每个特征征的全部线性无关的特征向量.矩阵A 的特征多项式的根有时也称为A 的特征值,而相应的线性方程组(3)的解也就称为A 的属于这个特征值的特征向量.例1 在n 维线性空间中,数乘变换K 在任意一组基下的矩阵都是kE ,它的特征多项式是 n k kE E )(-=-λλ.因此,数乘变换K 的特征值只有k ,由定义可知,每个非零向量都是属于数乘变换K 的特征向量.例2 设线性变换A 在基321,,εεε下的矩阵是⎪⎪⎪⎭⎫ ⎝⎛=122212221A ,求A 的特征值与特征向量.例3 在空间n x P ][中,线性变换D )()(x f x f '=在基)!1(,,!2,,112--n x x x n 下的矩阵是 ⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=0000100001000010 D D 的特征多项式是n D E λλλλλ=---=- 0001000010001.因此,D 的特征值只有0.通过解相应的齐次线性方程组知道,属于特征值0的线性无关的特征向量组只能是任一非零常数.这表明微商为零的多项式只能是零或非零的常数.例4 平面上全体向量构成实数域上一个二维线性空间,§1例1中旋转ℱθ在直角坐标系下的矩阵为⎪⎪⎭⎫ ⎝⎛-θθθθcos sin sin cos 它的特征多项式为 1cos 2cos sin sin cos 2+-=---θλλθλθθθλ 当πθk ≠时,这个多项式没有实根.因之,当πθk ≠时,ℱθ没有特征值.从几何上看,这个结论是明显的.容易看出,对于线性变换A 的任一个特征值0λ,全部适合条件A αλα0=的向量α所成的集合,也就是A 的属于0λ的全部特征向量再添上零向量所成的集合,是V 的一个子空间,称为A 的一个特征子空间,记为0λV .显然,0λV 的维数就是属于0λ的线性无关的特征向量的最大个数.用集合记号可写为.{}V A V ∈==ααλααλ,|00在线性变换的研究中,矩阵的特征多项式是重要的.下面先来看一下它的系数.在.212222111211nnn n n na a a a a a a a a A E ---------=-λλλλ的展开式中,有一项是主对角线上元素的连乘积)())((2211nn a a a ---λλλ展开式中的其余项,至多包含2-n 个主对角线上的元素,它对λ的次数最多是2-n .因此特征多项式中含λ的n 次与1-n 次的项只能在主对角线上元素的连乘积中出现,它们是12211)(-+++-n nn n a a a λλ .在特征多项式中令0=λ,即得常数项A A n)1(-=-.因此,如果只写特征多项式的前两项与常数项,就有 A a a a A E n n nn n )1()(12211-+++++-=-- λλλ. (5)由根与系数的关系可知,A 的全体特征值的和为nn a a a +++ 2211(称为A 的迹).而的A 全体特征值的积为A .特征值自然是被线性变换所决定的.但是在有限维空间中,任取一组基后,特征值就是线性变换在这组基下矩阵的特征多项式的根.随着基的不同,线性变换的矩阵一般是不同的.但是这些矩阵是相似的,对于相似矩阵有定理6 相似矩阵有相同的特征多项式.定理6说明,线性变换的矩阵的特征多项式与基的选取无关,它直接被线性变换所决定的.因此,以后就可以说线性变换的特征多项式了.既然相似的矩阵有相同的特征多项式,当然特征多项式的各项系数对于相似的矩阵来说都是相同的.考虑特征多项式的常数项,得到相似矩阵有相同的行列式.因此,以后就可以说线性变换的行列式.应该指出,定理6的逆是不对的,特征多项式相同的矩阵不一定是相似的.例如⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=1011,1001B A 它们的特征多项式都是)1(-λ,但A 和B 不相似,因为和A 相似的矩阵只能是A 本身.哈密顿-凯莱(Hamilton-Caylay)定理 设A 是数域P 上一个n n ⨯矩阵,A E f -=λλ)(是A 的特征多项式,则0)1()()(12211=-+++++-=-E A A a a a A A f n n nn n推论 设A 是有限维空间V 的线性变换,)(λf 是A 的特征多项式,那么f (A)=ℴ.备注线性变换是否一定有特征值?(不一定,与数域有关)考虑作业布置课后相应习题.第7章 线性变换(第4讲)目标与要求掌握线性变换的矩阵为对角矩阵的充分必要条件;掌握线性变换的矩阵为对角矩阵的实施步骤(矩阵对角化方法)掌握可对角化矩阵的简单应用.重点难点重点:掌握线性变换的矩阵为对角矩阵的充分必要条件及矩阵对角化的方法;掌握可对角化矩阵的简单应用难点:掌握矩阵相似于对角阵的条件及对角化方法.01.10A -⎡⎤=⎢⎥⎣⎦设计安排首先介绍线性变换的矩阵为对角矩阵的充分必要条件及推论,进而给出线性变换的矩阵为对角矩阵的实施步骤并举例,最后研究可对角化矩阵的简单应用:(i) 由特征值和特征向量反求矩阵A: A=X Λ X –1;(ii) 求方阵的幂: A k =X Λk X –1补充例题显示应用情况.教学进程见幻灯片部分.(2时)习题课梳理、总结本章内容,通过典型例题加深、巩固所学内容,讲评思考题、作业问题,处理课后疑难问题.(2课时)教学内容§5 对角矩阵定理7 设A 是n 维线性空间V 的一个线性变换,A 的矩阵可以在某一基下为对角矩阵的充要条件是A 有n 个线性无关的特征向量.定理8 属于不同特征值的特征向量是线性无关的.推论1 如果在n 维线性空间V 中,线性变换A 的特征多项式在数域P 中有n 个不同的根,即Å有n 个不同的特征值,那么A 在某组基下的矩阵是对角形的.推论2 在复数上的线性空间中,如果线性变换A 的特征多项式没有重根,那么A 在某组基下的矩阵是对角形的.在一个线性变换没有个不同的特征值的情形,要判断这个线性变换的矩阵能不能成为对角形,问题就要复杂些.定理9 如果k λλ,,1 是线性变换A 的不同的特征值,而i ir i αα,,1 是属于特征值i λ的线性无关的特征向量,k i ,,2,1 =那么向量组k kr k ir αααα,,,,,,1111 也线性无关.根据这个定理,对于一个线性变换,求出属于每个特征值的线性无关的特征向量,把它们合在一起还是线性无关的.如果它们的个数等于空间的维数,那么这个线性变换在一组合适的基下的矩阵是对角矩阵;如果它们的个数少于空间的维数,那么这个线性变换在任何一组基下的矩阵都不能是对角形.换句话说,设A 全部不同的特征值是r λλ,,1 ,于是A 在某一组基下的矩阵成对角形的充要条件是A 的特征子空间r V V λλ,,1 的维数之和等于空间的维数.应该看到,当线性变换A 在一组基下的矩阵A 是对角形时:⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=n A λλλ 00000000021 A 的特征多项式就是)())((21n A E λλλλλλλ---=-因此,如果线性变换A 在一组基下的矩阵是对角形,那么主对角线上的元素除排列次序外是确定的,它们正好是A 的特征多项式全部的根(重根按重数计算).根据§3定理5,一个线性变换的矩阵能不能在某一组基下是对角形的问题就相当于一个矩阵是不是相似于一个对角矩阵的问题.例 在§4的例2中,已经算出线性变换A 的特征值是-1(二重)与5,而对应的特征向量是.,,3213322311εεεξεεξεεξ++=-=-= 由此可见,A 在基.,,321ξξξ下的矩阵为对角矩阵⎪⎪⎪⎭⎫ ⎝⎛--=500010001B而由321,,εεε到.,,321ξξξ的过渡矩阵是⎪⎪⎪⎭⎫ ⎝⎛--=111110101X于是,B AX X=-1.习题课 备注如何判定矩阵A 与对角矩阵相似?作业布置课后相应习题.。
大学数学高数微积分第七章线性变换第三节课件课堂讲解

主要内容
线性变换、基与基的像 线性变换的矩阵 向量像的计算公式 线性变换在不同基下矩阵的关系 相似矩阵
一、线性变换、基与基的像
设 V 是数域 P 上 n 维线性空间,1 , 2 , … , n 是 V 的一组基,这一节我们来建立线性变换与矩 阵的关系. 首先来讨论线性变换、基与基的像之间
义.
五、相似矩阵
1. 定义 定义 8 设 A,B 为数域 P 上两个 n 级矩阵,
如果可以找到数域 P 上的 n 级可逆矩阵 X,使得 B = X-1AX ,
就说 A 相似于 B,记作 A ~ B .
2. 性质
相似是矩阵之间的一种关系,这种关系具有下 面三个性质:
1) 反身性:A ~ A .
这是因为 A = E-1AE .
结 论 1 设 1 , 2 , … , n 是 线 性 空 间 V 的 一 组 基 .
如果线性变换 A 与 B 在这组基上的作用相同,
即
A i= B i ,
i = 1, 2, … , n ,
那么 A = B .
结 论 2 设 1 , 2 , … , n 是 线 性 空 间 V 的 一 组 基 . 对于任意一组向量 1, 2, … , n一定有一个线性 变换 A 使
利用线性变换的矩阵可以直接计算一个向量的
像.
三、向量像的计算公式
定理 3 设线性变换 A 在 基1 , 2 , … , n下
的矩阵是 A, 向量 在基 1 , 2 , … , n 下的坐标是
(x1 , x2 , … , xn ), 则 A 在基 1 , 2 , … , n 下的坐
标 (y1 , y2 , … , yn ) 可以按公式
矩阵 A 称为 A 在基 1 , 2 , … , n 下的矩阵.
1-3-线性变换2013

1-3-线性变换2013§3 线性变换及其矩阵表示以上讨论了线性空间的代数结构,说明了F 上任一线性空间n V 都与向量空间n F 同构。
但尚未涉及两个向量空间之间的转换关系。
然而,在技术科学、社会科学和数学的一些分支中,不同向量空间之间的线性变换起着重要的作用。
因此,为了研究两个向量空间之间的关系,有必要考虑能够从一个向量空间到另一个向量空间的转换关系的函数。
事实上,在我们的日常生活中,也经常遇到这种转换。
当我们欲将一幅图像变换为另一幅图像时,通常会移动它的位置,或者旋转它。
例如,函数),(),(y x y x T βα=就能够将图像的x 坐标和y 坐标改变尺度。
根据α和β大于1还是小于1,图像就能够被放大或者缩小。
下面我们讨论线性空间之间一种最简单但又最重要的联系,即线性变换,特别是n V 到自身的线性变换(也称为线性算子)。
定义1 设n V 到m V 的变换T 称为线性的,如果对任意的数k 及n V 中任意向量βα, ,恒有.)( ,)(ααβαβαkT k T T T T =+=+记m V T ∈=αξ,则称ξ为α在T 下的像,α称为ξ的原像。
特别,当T 是n V 到自身的一个线性变换,则称T 是n V 的线性变换。
定义中的两个条件也可以合并写作βαβαT k T k k k T 2121)(+=+更一般地,若n p V ∈u u u ,,21,反复使用上面公式,可得p p p p T k T k T k k k k T u u u u u u +++=+++ 22112211)( 这一公式在工程和物理中被称为叠加原理(superposition principle)。
如果p u u u ,,21分别是某个系统或过程的输入信号向量,则p T T T u u u ,,21可分别视为该系统或过程的输出信号向量。
判断一个系统是否为线性系统的判据是:如果系统的输入为线性表达式p p k k k u u u y +++= 2211,则当系统的输出也满足相同的线性关系p p T k T k T k T u u u y +++= 2211时,该系统为线性系统。
线性变换

( 2 ) (0,1,0) (0,1,1)
( 3 ) (0,0,1) (0,0,0)
1 0 0 ( 1 , 2 , 3 ) ( 1 , 2 , 3 ) 0 1 0 1 1 0
第七章 线性变换
30
例2. 设 1 , 2 ,, m ( m n)为n维线性空间V的子空
第七章 线性变换
18
一、 线性变换的乘积
1.定义
设 , 为线性空间V的两个线性变换,定义它们 的乘积 为: , V 则 也是V的线性变换.
第七章 线性变换
19
例1. 线性空间 R[ x] 中,线性变换
D f x f x
6
第七章 线性变换
7
第七章 线性变换
8
一、 线性变换的定义
二、 线性变换的简单性质
9
一、 线性变换的定义
设V为数域P上的线性空间,若变换 : V V 满足: , V , k P
k k
1, 2 ,, n
(Ⅰ ) (Ⅱ )
1 ,2 ,,n
下的矩阵分别为A、B,且从基(Ⅰ) 到基(Ⅱ)的过渡 矩阵矩阵是X,则
B X 1 AX .
第七章 线性变换
35
证:由已知,有
1, 2 , , n 1 , 2 , , n A,
2.线性变换保持线性组合及关系式不变,即 若 k11 k2 2 kr r , 则 k1 1 k2 2 kr r . 3.线性变换把线性相关的向量组变成线性相关 的向量组.
第七章 线性变换
高等代数第七章线性变换

高等代数第七章线性变换一、定义:变换:线性空间V到自身的映射通常称为V的一个变换线性变换=线性映射+变换更准确地说线性变换的特点就是满足线性性以及定义域和陪域都是同一个线性空间*这里说的陪域是丘维生的高等代数里提出的一个概念,与值域的每一个自变量都有因变量相对应不同的是陪域包含自变量没有因变量相对应的情况这样解释是为了类比:同构映射=线性映射+双射也就是说同构映射的特点是满足线性性以及每一个自变量都有一个因变量相对应下面引出线性变换的准确定义线性变换:如果对于V中任意的元素 \alpha,\beta和数域P 中任意数k,都有\sigma(\alpha+\beta )=\sigma(\alpha)+\sigma(\beta) ,\sigma(k\alpha)=k\sigma(\alpha) 则称线性空间V的一个变换 \sigma 称为线性变换。
二、线性变换的矩阵所有线性变换的全体可以通过选取V的一组基与所有矩阵的全体建立一一对应的关系,将几何对象和代数对象建立转化。
只要取一组足够好的基,就可以得到足够好的矩阵。
某些特殊情况下,矩阵可以取成对角阵,就称线性变换可以对角化,不可对角的矩阵可以写成若尔当块的形式,则选取的基就为循环基,当做不到选取循环基时就只能上三角化或者下三角化。
三、矩阵的相似1.定义Ⅰ.①相似的定义: A,B\in P^{n\times n} ,若存在可逆矩阵 P ,使得 P^{-1}AP=B ,则称A与B是相似的②相似的标准型:若尔当标准型Ⅱ.类比合同(相抵):本质是初等变换①合同的定义: A,B\in P^{n\times n} 若存在可逆矩阵P ,使得 PAQ=B ,则称A与B是合同的②合同的标准型:PAQ=\left( \begin{array}{cc} E_{r}&0\\ 0&0 \end{array} \right),r=r(A),E(r)=\left( \begin{array}{cc} 1&&\\ &1 &\\ &...\\ &&1 \end{array} \right)_{r\times r}③性质:若 A\sim B ,则 \left| A \right|=\left| B \right| ,r(A)=r(B)若A\sim B ,则 A,B 的特征多项式相同,极小多项式相同若 A\sim B ,则 A'\sim B'*根据定义有 P^{-1}AP=B ,两边同时转置: P'A'(P')^{-1}=B' ,则 A'\sim B'若 A\sim B ,A可逆,则 A^{-1}\sim B^{-1}若 A\sim B ,则 A^{k}\sim B^{k}若 A\sim B , f(x)\in k[x] (f(x)是数域K上的多项式)则 f(A)\sim f(B) (A与B的多项式相似)*多项式的形式是 f(x)=x^{k}+x^{k-1}+...+x+m ,由A^{k}\sim B^{k} ,则 f(A)\sim f(B)若 A\sim B,则 A^{*}\sim B^{*} (A的伴随矩阵相似于B的伴随矩阵)四、矩阵的特征值和特征向量1.定义:对于矩阵A,若存在 x\ne0 (非零向量), x\inK^{n} ,s,t, Ax=\lambda x ,则称 \lambda 是 A 的一个特征值, x 是 \lambda 对应的特征向量2.求特征值、特征向量①求解特征多项式f(\lambda)=\left| \lambda E_{n} -A\right|=0\Rightarrow\lambda_{1},\lambda_{2},...,\lambda_{n} 为特征值②求 (\lambda_{i} E_{n} -A)x=0\Rightarrowx_{1},x_{2},...,x_{n} 为特征向量3.性质:若矩阵A的特征值为 \lambda_{1},...,\lambda_{n}① tr(A)=\lambda_{1}+...+\lambda_{n} ( tr(A) 为矩阵的迹:对角线元素之和为矩阵特征值之和)② \left| A\right|=\lambda_{1}\lambda_{2}...\lambda_{n}③哈密顿-凯莱定理:特征多项式一定是零化多项式f(\lambda)=\left| \lambda E_{n}-A \right|,f(A)=0*零化多项式: f(x)\in k[x] ( f(x) 是数域K上的多项式),若 f(A)=0 则称 f(x) 是 A 的零化多项式eg. f(x)=x^2-3x+1 则有 A^2-3A+E_{n}=0④若 f(A)=0\Rightarrow f(\lambda)=0eg. A^2-3A+E_{n}=0\Rightarrow\lambda^2-3\lambda+1=0则根据④若矩阵A的特征值为\lambda_{1},\lambda_{2},...,\lambda_{n}\Rightarrow A^{-1} 的特征值为\frac{1}{\lambda_{1}},\frac{1}{\lambda_{2}},...,\frac{ 1}{\lambda_{n}}\Rightarrow aA 的特征值为a\lambda_{1},a\lambda_{2},...,a\lambda_{n}\Rightarrow A^{k} 的特征值为\lambda_{1}^k,\lambda_{2}^k,...,\lambda_{n}^k五、矩阵A可对角化的判别办法① A_{n\times n} 可对角化 \Leftrightarrow n阶矩阵A有n个线性无关的特征向量设 \lambda_{1},\lambda_{2},...,\lambda_{s} 是两两不同的特征值②A可对角化 \LeftrightarrowdimV_{\lambda_{1}}+dimV_{\lambda_{2}}+...+dimV_{\lambd a_{s}}=n③(充分但不必要条件)A的特征多项式无重根 \Rightarrow A可对角化六、不变子空间定义:W是线性空间V的子空间,线性变换 \sigma:V\rightarrow V ,若 \sigma(W)\subseteq W ,则称W是\sigma 的不变子空间利用定义求不变子空间。
8-二维直接线性变换DLT
2 2 2
可得: (h
2 2 1 − h7 x0 ) − (h2 − h8 x0 ) + (h4 − h7 y 0 ) − (h5 − h8 y 0 ) + h − h ( 7 8 ) =0 f2 2
获取f并已知x0,y0的情况下可分解外方位元素:
( a1 h1 − h7 x0 ) =− a3 fh7
ØDLT
武汉大学测绘学院·詹总谦·2013年09
DLT的特点及用法
n 三维DLT解法可提供1/5000(相对摄影距离)的测量精度; n 影响3D DLT的因素主要包括:像点坐标量测精度;控制点 的数量、质量和分布;像片数量及交会角; n 二维DLT广泛使用在基于平面控制场的测量领域:室内钣 金件等钣金件测量、相机标定; n DLT一般用于中低精度测量,通常情况下用于获取像片外 方位元素初值,最终使用空间后方交会或者光束法平差获取 严密解;
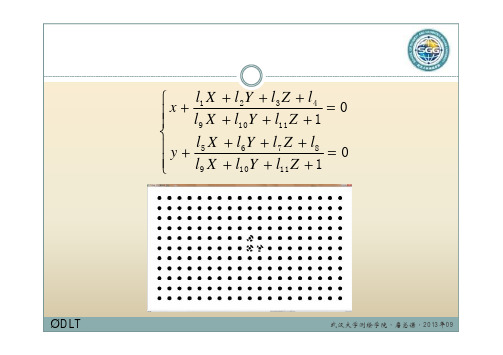
l3 Z + l 4 l1 X l 2Y + + l Z + 1 l11 Z + 1 l11 Z + 1 x + 11 =0 l X l Y 9 + 10 +1 l11 Z + 1 l11 Z + 1 l5 X l6Y l Z + l8 + + 7 l11 Z + 1 l11 Z + 1 l11 Z + 1 + =0 y l9 X l10Y + +1 l11 Z + 1 l11 Z + 1
3.5 直接线性变化的基本原理和解算方法

21立体摄影测量的基本原理0011 0010 1010 1101 0001 0100 10113.5 直接线性变化的基本原理和解算方法210011 0010 1010 1101 0001 0100 1011一、直接线性变化的关系式111333222333s s s i i i ()()()0()()()()()()0()()(),,,,s a b c i f s s s s s s s s s s s s a X X b Y Y c Z Z x f a X X b Y Y c Z Z a X X b Y Y c Z Z y f a X X b Y Y c Z Z X Y Z X Y Z -+-+-⎫+=⎪-+-+-⎪⎬-+-+-⎪+=⎪-+-+-⎭中心构像方程:其中:为物点的空间坐标 为光心的空间坐标 ,,(=1,2,3)旋转矩阵 所测x y 像片的主距,像点在摄影坐标系的坐标210011 0010 1010 1101 0001 0100 1011直接线性变化法•直接线性变换(DLT —Direct Linear Transformation )算法是直接建立像点坐标与物点空间坐标关系式的一种算法。
•该算法在机算中,不需要内、外方位元素。
而直接通过像点解算物点。
210011 0010 1010 1101 0001 0100 1011二、线性误差的修正1、线性误差:•底片均匀变形、不均匀变形•畸变差•x ,y 坐标轴不垂直2、线性修正ℓ系数假设主点坐标为(0,0)210011 0010 1010 1101 0001 0100 1011i i 12301231111s 1s 1s 1233333s 3s 3s 2222s 2s 2s 1233i x x y y a X+b Y+c Z (a X +b Y +c Z )f a X+b Y+c Z (a X +b Y +c Z )a X+b Y+c Z (a X +b Y +c Z )f a X x y y y x y x y x y αβαααβββαααβββ∴⎧+⎪⎨=-++⎪⎩+++0像片坐标系的坐标原点为主点设,(=1,2,3)为引入的线性修正系数=x-x ==+则==代入共线方程-++--+333s 3s 3s 1s 1s 1s 2s 2s 2s 33s 3s 3s +b Y+c Z (a X +b Y +c Z )r (a X +b Y +c Z )r (a X +b Y +c Z )r (a X +b Y +c Z )⎧⎪⎪⎨⎪⎪⎩⎧⎪⎨⎪⎩12-=-定义=-=-210011 0010 1010 1101 0001 0100 1011123491011567891011x y x 0101X Y Z X Y X X Y Z X Y X +++⎧=⎪+++⎪⎨+++⎪=⎪+++⎩其中上式为关于,的二元一次方程求解方程式:+y +系数为线性修正系数已知系数和物点坐标可以求解像点坐标210011 0010 1010 1101 0001 0100 1011三、内方位元素的解算11103332220333()()()0()()()()()()0()()()x y s s s x s s s s s s y s s s x y x x xy y y a X X b Y Y c Z Z x x f a X X b Y Y c Z Z a X X b Y Y c Z Z y y f a X X b Y Y c Z Z f f =-=--+-+-⎫-+=⎪-+-+-⎪⎬-+-+-⎪-+=⎪-+-+-⎭主点不在原点的共线方程为:其中,为像片在方向和方向的摄影主距210011 0010 1010 1101 0001 0100 101111110333311110333300a b c r 0a b c r a b c r 0a b c r x 0y 0x y X Y Z x x f X Y Z X Y Z y y f X Y Z x y ⎫-⎪⎪⎬⎪-⎪⎭⎫⎪⎪⎬⎪⎪⎭123491011567491011则上式可以简化为:++++=+++++++=+++合并,简化为下式:L X+L Y+L Z+L +=L X+L Y+L Z +1L X+L Y+L Z+L +=L X+L Y+L Z +1210011 0010 1010 1101 0001 0100 1011x x 33x x 33x x 33x x 333339333a f a xb f b x r rc f c x r f r x r r a f a x b f b x r r c f c x r f r x r r a b c r r r L L 130130121301303423023056230230781011求解系数:(-)(-)L = L =(-)(-)L = L =(-)(-)L = L =(-)(-)L = L == L = L =210011 0010 1010 1101 0001 0100 1011[]{[]}[][]x 31s 1s 1s x 3s 3s 3s 03s 1x 301x 301x 30s 3s s 1x 301x 301x 30s 3s r f r x r (a X +b Y +c Z )f (a X +b Y +c Z )x r a f a x b f b x c f c x r a f a x b f b x c f c x r X Y Z X Y Z ∴-⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦-⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦13048(-)L =1=---1 =---1同理:L =---210011 0010 1010 1101 0001 0100 1011x 0111s y 0222s 3333s f 0x a b c 1000f y a b c 010r 001a b c 001X Y Z ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦888888888888可建立L的系数矩阵L L L L L L L =L L L L L L --1=---210011 0010 1010 1101 0001 0100 1011391011333i i i 22233131313222222233323s 3s 3s 19210311222x 131313033232223323a b c a b c 1a a b b c c 01(a b c )r (a X +b Y +c Z )f a a b b c c x a b c r x a b c r x L L L L L L L L L L ∴⎧⎪⎨⎪⎩++=∴++⎡⎤⎣⎦00,,之间存在下列关系式:++=++=由矩阵有:++=又1 =(++)-(++) =-(++)=-()()910119101191011222222019210311222059610711x y L L L L L L L L L L L L L L L L L L L L L ++++++∴++++()=-=-210011 0010 1010 1101 0001 0100 1011()()()()()91011910112221231x 301x 301x 3023x 23222222x 123222222x 567x y 1a f a x b f b x c f c x r1f x r f x f x 1f f f L L L L L L L L L L L L L L L ⎡⎤++=⎣⎦⎧++++⎪⎨++++⎪⎩222220220220(-)+(-)+(-) =(+)同理求解:=-+=-+=+2四、直接线性变化的计算过程0011 0010 1010 1101 0001 0100 1011•矩阵L有12个未知系数21•需要已知6个空间待测点的坐标和6对立体像对,即12个像点坐标,才能求解L系数210011 0010 1010 1101 0001 0100 1011[][]xi yi 91011xi i 1i 2i 34i i 9i i 10i i 11i i yi i 5i 6i 78i i 9i i 10i i 11i i 6v v 11v x x x x 1v y y y y L A L X L Y L Z X L Y L Z L L X L Y L Z L A X L Y L Z L L X L Y L Z L A =++⎧++++++⎪⎪⎨⎪++++++⎪⎩第一步:解算系数设在大地坐标系上有个待测点,对应6对立体像对则共有12个关于L的方程,为像点坐标的修正系数令+误差方程:=-+=-+令修正矩阵为:i xiyixiyi xiyi v v v v v v T⎡⎤⎣⎦V =21 0011 0010 1010 1101 0001 0100 1011111111111111111111111111111111116666666666661666666666666666666610000x x x 00001y y y10000x x x 00001y y yBX A Y A Z A A X A Y A Z AX A Y A Z A A X A Y A Z AX A Y A Z A A X A Y A Z AX A Y A Z A A X A Y A Z A ------⎡⎢-----⎢⎢⎢⎢------------⎣=1112610611xyyxLLLLL⎤⎥⎥⎥⎥⎥⎢⎥⎢⎥⎢⎥⎦⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1166-A-AI=-A-A210011 0010 1010 1101 0001 0100 1011121121111112111121210111212111111112121TTTV B L I BVBB L BI =+⨯⨯⨯⨯=⨯⨯+=⨯⨯⨯⨯⨯210011 0010 1010 1101 0001 0100 1011i i x y x y x y x y 2x y x y v v v v v v v v L L V '''''⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥'⎢⎥⎢⎥⎣⎦⎢⎥'⎢⎥⎣⎦第二步:已知系数,由像点坐标解算物点坐标求解空间物点的坐标为:(X,Y,Z)像机1的L系数为L ,像机的系数为L 立体像对的像点坐标分别为(,)和(,)误差修正系数分别为,和,X 令 S=Y Z210011 0010 1010 1101 0001 0100 101119210311591107111921031159610711(x )(x )(x )(y )(y )(y )(x )(x )(x )(y )(y )(y )L L L L L L L L L L L L N L L L L L L L L L L L L N S ⎡⎤+++⎢⎥⎢⎥⎢⎥+++⎢⎥=⎢⎥''''''⎢⎥'''+++'''⎢⎥⎢⎥''''''''+++⎢⎥⎢⎥'''⎣⎦=+111---A A A111---A A A 111---A A A 111---A A A 矩阵方程为:V 41433141TTQ N NS N Q ⨯⨯⨯⨯+=210011 0010 1010 1101 0001 0100 1011五、关于A值的问题9101133103310333333s 3s 3s3333s 3s 3s 1a rb rc r a X+b Y+c 1a X +b Y +c a X+b Y+c 1a X +b Y +c 1A A L X L Y L Z L L ZA Z ZZ A =+++∴===∴≈ 9值的表达式为:L =-+在实际测量中在机算中210011 0010 1010 1101 0001 0100 1011七、外方位元素的解算()[][][]()[]()[][][]()()()()9101191011910119101191011333333391011122221231x 301x 301x 303312333303030111222222222x222221a b c r 1a b c 2a f a x b f b x c f c x r 1a b c a x b x c x f 3a b c L L L L L L L L L L L L L L L L L L L L L L L L ∴⇒++⎡⎤⎢⎥⇒⎢⎥⎢⎥++++++⎣⎦、外方位角元素的解算11==1又=---=+++同理可求[]()()()()()()()9101191011910115672303030111222222222y 222i i i 1a y b y c y f 123a b c i 123L L L L L L L L L L L L φωκ⎡⎤⎢⎥⎢⎥⎢⎥++++++⎣⎦⇒=+++由、、求方向余弦,,=,,求外方位角元素,如、、。
论文-第二章近景摄影测量的理论-2.3直接线性变换解法
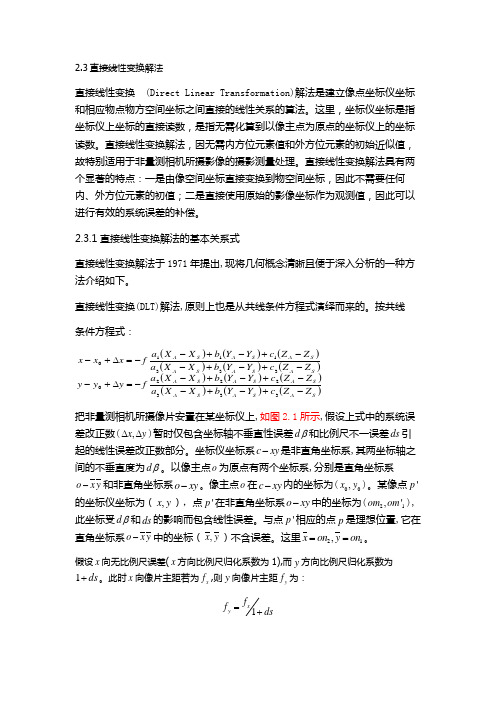
2.3直接线性变换解法直接线性变换 (Direct Linear Transformation)解法是建立像点坐标仪坐标和相应物点物方空间坐标之间直接的线性关系的算法。
这里,坐标仪坐标是指坐标仪上坐标的直接读数,是指无需化算到以像主点为原点的坐标仪上的坐标读数。
直接线性变换解法,因无需内方位元素值和外方位元素的初始近似值,故特别适用于非量测相机所摄影像的摄影测量处理。
直接线性变换解法具有两个显著的特点:一是由像空间坐标直接变换到物空间坐标,因此不需要任何内、外方位元素的初值;二是直接使用原始的影像坐标作为观测值,因此可以进行有效的系统误差的补偿。
2.3.1直接线性变换解法的基本关系式直接线性变换解法于1971年提出,现将几何概念清晰且便于深入分析的一种方法介绍如下。
直接线性变换(DLT)解法,原则上也是从共线条件方程式演绎而来的。
按共线 条件方程式:()()()()()()()()()()()()S A S A S A S A S A S A S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a f y y y Z Z c Y Y b X X a Z Z c Y Y b X X a fx x x -+-+--+-+--=∆+--+-+--+-+--=∆+-33322203331110 把非量测相机所摄像片安置在某坐标仪上,如图2.1所示,假设上式中的系统误差改正数(,x y ∆∆)暂时仅包含坐标轴不垂直性误差d β和比例尺不一误差ds 引起的线性误差改正数部分。
坐标仪坐标系c xy -是非直角坐标系,其两坐标轴之间的不垂直度为d β。
以像主点o 为原点有两个坐标系,分别是直角坐标系o xy -和非直角坐标系o xy -。
像主点o 在c xy -内的坐标为(00,x y )。
某像点'p 的坐标仪坐标为(,x y ),点'p 在非直角坐标系o xy -中的坐标为(21,'om om ),此坐标受d β和ds 的影响而包含线性误差。
高等代数第7章线性变换PPT课件

特征向量定义
对应于特征值m的非零向量x称为A的对应于特征值 m的特征向量。
设A是n阶方阵,如果存在数m和非零n维列向 量x,使得Ax=mx成立,则称m是A的一个特 征值。
求解方法
通过求解特征多项式f(λ)=|A-λE|的根得到特 征值,再代入原方程求解对应的特征向量。
特征多项式及其性质分析
特征多项式定义
量子力学
在量子力学中,特征值和特征向量用 于描述微观粒子的状态和能量级别。
图像处理
在图像处理中,特征值和特征向量可 以用于图像压缩和图像识别等任务。
经济学
在经济学中,特征值和特征向量可以 用于分析和预测经济系统的稳定性和 发展趋势。
04
线性变换对角化条
件及步骤
可对角化条件判断方法
判断矩阵是否可对角化
线性变换的性质与 矩阵性质对应
线性变换的性质如保持加法、 数乘等运算可以通过其对应的 矩阵性质来体现。例如,两个 线性变换的和对应两个矩阵的 和;线性变换的复合对应两个 矩阵的乘积等。
02
线性变换矩阵表示
法
标准基下矩阵表示法
定义
设V是n维线性空间,e1,e2,...,en 是V的一个基,T是V上的一个线 性变换,则T在基e1,e2,...,en下的 矩阵A称为T在基e1,e2,...,en下的 标准矩阵表示。
计算矩阵的高次幂
对于可对角化的矩阵A,可以利用对角化公式A=PDP^(-1)将A的高次幂转化为对角矩阵D的高次幂, 从而简化计算过程。
求解线性方程组
对于系数矩阵为可对角化矩阵的线性方程组,可以通过对角化将系数矩阵转化为对角矩阵,进而 简化方程组的求解过程。
计算行列式和逆矩阵
对于可对角化的矩阵A,其行列式值等于对角矩阵D的行列式值,逆矩阵可以通过对角化公式求得, 从而简化相关计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
是否有某种算法适合非量测摄影机的数 据处理?
答案是肯定的。
一、定义
直接线性变换解法是建立像点的“坐标 仪坐标”和相应物点的物方空间坐标直接的 线性关系的解法.
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
[om 2,o1 m ] 以像主点为原点包含不正交 性dβ误差的像点p的坐标;
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
(x,y)o [2,n o1]n 以像主点为原点,不包含线 性误差的像点p的坐标;
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
即 与 之 1
ZZ: 间 的CC
u v
关 1
dx
0
0
系
0
1 dy 0
u
0
v0
1
f
0
0
0 f 0
0 0 1
0 t 1
Y Z
1
像空与物方
投影关系
像素与像平面
§7.2 直接线性变换解法的基本关系式
由另外一种方法来推演共线条件方程式…… 4、成像共线条件方程式
l9 X l10Y l11Z 1
§7.2 直接线性变换解法 的基本关系式
直接线性变换解法原则上也是由共线条 件方程式推演而来。
xy xy00 xyffaaaa3123((((X X X X X X X XSSSS)))) bbb b1 33 2((((Y YY Y Y YY YSSSS)))) cccc1332((((Z ZZ Z Z ZZ ZSSSS))))
§7.1 概述
0、背景
以往的航空摄影测量测图多半以内定向相对定向-绝对定向的方案处理立体像对。
此时的内定向需已知像片的参数:
内方位元素、框标的理论坐标
即,所用相机为量测摄影机。 地面摄影测量按此种方案处理时也需使用
量测摄影机。
目前存在的大量非量测摄影机,如 CCD 摄像机、普通数码相机、工业相机,能否应 用于近景摄影测量中是人们普遍关心的问题。
u
x dx
u0
v
y dy
v0
将此式写成矩阵形式
u (u0 , v0)
x
v
y
1
u
v
1
dx
0
0
0
1 dy 0
u0 v0 1
x y 1
x dx 0 u0dxu
或: y0 dy v0dyv
1 0 0 1 1
§7.2 直接线性变换解法的基本关系式
由另外一种方法来推演共线条件方程式……
2、像空间坐标系与物方坐标系之间的关系
XC X XS
YC
RY
YS
ZC Z ZS
XC
YC Z1C
R 0T
X X
1tYZ
LW
Y Z
1
1
式中:R 为旋转矩阵 t 为平移向量
§7.2 直接线性变换解法的基本关系式
由另外一种方法来推演共线条件方程式……
3、成像投影关系
xx0(1d)s sidn(yy0)fxa a 3 1((X X X X S S)) b b 1 3((Y Y Y Y S S)) c c1 3 ((Z Z Z Z S S))0
(2) (1d)s co d(syy0)fxa a 2 3((X X X X S S)) b b 3 2((Y Y Y Y S S)) c c3 2((Z Z Z Z S S))0
从图中可以 看出:
y o 1 o n m 1 o 1 c m d o o m s 1
( 1 d ) y s ( y 0 ) c d o ( y s y 0 )
[ 1 ( d ) c s d o 1 ] s y (y 0 )
(yy0)ds
(1) xy xy00 xy ffaa a a312 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSSS)))) 将δx, δy代入式(1) xx0 (1 d)s y (y0)sidn fxa a 3 1 ( (X X X X S S) ) b b 1 3( (Y Y Y Y S S) ) c c 1 3 ((Z Z Z Z S S))0 yy0 [1 ( d)s co d s1 ]y (y0)fxa a 2 3( (X X X X S S) ) b b 3 2( (Y Y Y Y S S) ) c c 3 2((Z Z Z Z S S))0
1
§7.2 直接线性变换解法的基本关系式
由另外一种方法来推演共线条件方程式…… 共线条件方程式
X
u l1 ZCv l5
l2 l6
l3 l7
l4 l8
Y Z
1
l9
l10
l11
l12
1
u l 1 X l 2 Y l 3 Z l 4 /Z C v l 5 X l 6 Y l 7 Z l 8 /Z C
Z C l9X l1Y 0 l1Z 1 l1 2
u v
l1X l2Y
l9X l10Y l5X l6Y
l3Z l4
l11Z l1 l7Z l8
2
l9X l10Y l11Z l12
u v
l1 X
l9 X l5 X
l2Y l3Z l4
l10Y l11Z 1 l6Y l7Z l8
以上假设认为x轴方向无比例尺误差的影 响。
设x轴方向比例系数为1, 则y轴方向比例 系数为 (1+ds) ;
设x轴方向主距为fx, 则y轴方向主距为
fy= fx/(1+ds) ;
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
(2)
xx0(1d)s sidn(yy0)fxa a 3 1((X X X X S S)) b b 1 3((Y Y Y Y S S)) c c1 3 ((Z Z Z Z S S))0
(2) (1d)s co d(syy0)fxa a 2 3((X X X X S S)) b b 3 2((Y Y Y Y S S)) c c3 2((Z Z Z Z S S))0 式(2)中含有11个独立参数: 6个外方位元素(XS,YS,ZS ,φ,ω,κ) 3个内方位元素(x0,y0, fx ) 比例尺不一系数ds x,y轴间的不正交系数dβ
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
从图中可以 看出:
x o 2 o n 2 m 2 p sd i n o 1 s m d in
( 1 d)y s ( y 0 )si d n
(yy0)sid n
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))
(x 1 x d 0 )s (c 1o d d)(s s y s id y0 n ) (y fx a a y 2 3 0 (()X X fx X X a a S S 3 1 ))(( X X b b 3 2((X X Y Y S S ))Y Y S S b b ))1 3 ((Y Y c c3 2 ((Z Y Y Z S S )) Z Z S c S c1 )3 )((Z Z 0 Z Z S S))0
二、直接线性变换解法的特点 1、不归心、不定向; 2、不需要内外方位元素的起始值;???
3、物方空间需布置一组控制点; 4 、特别适合于处理非量测相机所摄影像; 5、本质是一种空间后交-前交解法。
§7.2 直接线性变换解法的基本关系式
由另外一种方法来推演共线条件方程式……
1、像素坐标与像平面坐标系之间的关系
此式中: (x,y)---像点的坐标仪坐标; (x0,y0)---像主点的坐标仪坐标; (X,Y,Z)---像点对应的物方点的物方
空间坐标 (XS,YS,ZS)---摄影中心的物方空间坐标 (ai,bi,ci)---旋转矩阵中的方向余旋 (δx,δy)---线性误差改正数(包含ds,dβ)
xy xy00 xy ffa a a a3 12 3((((X X X X X X X XS SS S)))) b bb b1 33 2((((Y Y Y Y Y Y Y YS SS S)))) cccc133 2 ((((Z Z Z Z Z Z Z ZSSS S))))