星载激光雷达数据处理与应用(王成[等]著)思维导图
激光雷达遥感 2讲 机载激光雷达数据处理方法
h h估 h测 0.19米
三维离散点的拟合
三维离散点的拟合
三维离散点的拟合
三维离散点的拟合
三维离散点的拟合
离散点拟合二维直线
离散点拟合二维直线
离散点拟合二维直线
离散点拟合二维直线
离散点拟合二维直线
离散点拟合二维直线
离散点拟合二维直线
建筑物模型生成(建模)
建筑物模型生成的任务是提取矢量化的建筑物 模型。
建筑物模型生成的主要任务
屋顶面的提取: 屋顶面是建筑物模型提取的一个重要部分,几
乎所有的建筑物模型生成的研究都集中于屋顶模型 的生成。
基于LiDAR数据的建筑物提取方法:
基于点云不变矩的方法
基于三角网的方法
自适应迭代的DSM影像分割方法
有以下几种分割方法:
利用二维GIS信息,即利用已有的图形数据, 辅助建筑物的提取;但需要注意实际的屋顶面常 常比图形数据所显示的面积要大。
在数据密度足够大,地面起伏不大的情况下, 可采取局部极值检测方法,并以极值点为中心进 行局部直方图分析,得到合理的阈值,实现房屋 点的提取和房屋边界的检测。
从影像中识别和提取建筑物大致包括以下五个方 面的内容:
(1)建筑物的定位和检测(Building Detection)
从图像中将建筑物与其它地物类别分离,并确定其位置
(2)建筑物的表征和描述(Building Representation and Description)
采用某种表示方法表述检测出的建筑物,常用的方法包括 几何形状模型、高程模型等。
依据实际地形可以判断回波波形数据的低谷 为池塘反射的波形数据,而反射强度较高的 地方为屋顶水泥面。从波形图可以看出低谷 位于60ns处,高峰位于190ns
星载激光雷达的发展与应用

综述文章(Reviews)以保证在同温层内吸收线强度。
由于DIAL所测量到的这两种波长光信号的衰减差是待测对象的吸收所致.因此通过数据分析便可得到待测对象的浓度分布,从而达到测量的目的【唧。
1.1.2月球观测CIemenlIne系统中的星载LiDAR设备1994年1月25日,由美国国防部和美国NASA联合研制的月球探测器Clementine在Vandenbe职空军基地发射升空。
在C1ementine系统中,有紫外/可见光/近/eVleW冒墨曩蕾翟盔葛远红外相机以及激光测距仪(LiDAR)等多个探测器同时工作,以尽可能多地获取月球的有关信息(见图1)。
Clementine上的LiDAR设备测量所得的数据资料用于制作月球表面高程图,也可以用于研究岩石圈的应力应变特性;或结合重力信息研究月球外壳密度分布等。
Clementine系统中星载LiDAR设备运行的实际轨道高度为640km,覆盖了月球两极600之间的范围。
在轨测量时运行45min后可以稳定在1Hz的脉冲重复频率【8】。
图1ClemenlIne卫星及其上的L.DAR设备Fig.1CIementineandLiDARsystem1.1.3火星勘探者号搭载的MOLA一2系统火星全球勘探者号MGS宇宙飞船由美国NASAGoddard空间飞行中心组织研发.于1996年11月7日发射升天,星载LiDAR测高系统MOIA一2是其搭载的四大仪器之一。
MGS历时两年到达火星.并顺利进入400km圆轨道,对火星地形进行测量。
MOLA(MarsOrbiterLaserAltimeter)探测的主要目的就是确定火星球体的地貌,为星体地质科学和物理学研究提供更多的资料;另外一个目的是研究火星表面反射率特征、分析球体表面矿物学分布,以及反射率的季节变化,为大气循环方面研究提供必要支持。
并为将来火星探测者的着陆地点选择提供测地学和地形学上的评估。
图2给图2MOLA系统及其测量的火星表面高程图Fig.2MOLAsystemandMartianDME出了MOLA系统外形及其探测到的火星表面高程图p101。
星上遥感数据处理理论与方法
目录分析
这一部分详细介绍了星上遥感技术的基本概念、原理和分类。作者从遥感卫 星的组成、遥感数据的获取等方面入手,为后续的数据处理打下了坚实的基础。
目录分析
在这一章节中,作者深入讲解了星上遥感数据处理的基础知识,包括数据的 预处理、校正、增强等步骤。同时,还介绍了常用的数据处理方法和工具,使读 者能够快速掌握数据处理的基本技能。
星上遥感数据处理理论与方法
读书笔记
01 思维导图
03 精彩摘录 05 目录分析
目录
02 内容摘要 04 阅读感受 06 作者简介
思维导图
本书关键字分析思维导图
数据
校正
遥感
读者
辐射
方法
地球
方法
遥感
理论 应用
研究
理论
提供
介绍
领域
通过
图像
案例
内容摘要
内容摘要
《星上遥感数据处理理论与方法》一书,详细探讨了星上遥感数据处理的核心理论与实用方法。 本书旨在为读者提供一套全面、系统的星上遥感数据处理知识体系,帮助读者深入理解遥感数据 处理的基本原理、技术流程和应用领域。 本书首先介绍了星上遥感数据处理的基本概念、目的和重要性。随着遥感技术的不断发展,星上 遥感数据处理已经成为地球观测和空间科学研究的关键环节。通过对遥感数据的处理,我们可以 获取到地球表面和大气层的各种信息,为环境监测、资源调查、城市规划等领域提供有力支持。 本书深入阐述了星上遥感数据处理的基本理论,包括辐射传输理论、信号与图像处理理论等。辐 射传输理论是研究遥感数据获取的基础,它描述了电磁波在地球大气层中的传播和散射过程。信 号与图像处理理论则是遥感数据处理的核心,它涉及图像增强、图像分割、特征提取等多个方面。
机载激光雷达测量系统解析ppt课件
LIDAR:AeroScan
INSAR:Star-3i
主要技术 参数
飞行高度:8000英尺; 频率:1500HZ; 带宽:1.8km; 4m点间距;
飞行高度:20000英尺; 频率:15000HZ; 带宽:8km; 5m间距;
主要 优点
垂直方向精度±15cm; 小区域及走廊区域最为理想;
非常适合植被覆盖和裸露区的真 实DEM提取; 扫描角内提供大范围扫描;
高精度高空间分辨率的森林或山区真实数字地面 模型 ③ 基本不需要地面控制点,地形数据采集速度快 ④ 作业安全 ⑤ 作业周期快,易于更新 ⑥ 时效性强 ⑦ 将信息获取、信息处理及应用技术纳入同一系统 中,有利于提高自动化高速化程度
4 机载激光雷达与机载InSAR的比较
4 机载激光雷达与机载InSAR的比较
6 工作流程及内业数据处理
飞行计划
GPS数据质量检查
系统参数测定和检校
航迹计算 激光脚点位置计算
外业数据采集
激光点云生成 分割
野外初步质量分析和控制
否 是
数据内业后处理
自动分类 内部QA/QC
手工分类 最后QA/QC
小结
1. 机载激光雷达测量的系统组成、激光扫描测距的 原理、动态GNSS定位、INS姿态测量系统、 GPS确定姿态的基本原理和方法
机载激光雷达测量系统的组成单元
测距单元
控制、监测、记 录单元
差分GPS 惯性测量单元
扫描仪
激光脚点 扫描方向
扫描带宽
激光雷达测距系统
•定义
包括:激光脉冲测距系统、光电扫描仪 及控制处理系统 原YA理G 激:光脉器冲是测以钇时铝测石距榴和石晶激体光为相基位质差的一测种距固
体 激光器 。钇铝石榴石的化学式是Y3 Al5 O15 ,简
第五届全国激光雷达大会概要议程

激光雷达点云目标检测技术的现状与挑战 李军 教授 厦门大学 闭幕式,暨颁奖仪式
晚餐(套餐)
王程
王成
陈卫标 王金亮 隋立春 毛庆洲 张吴明 姚巍 程亮 刘正军 周国清 刘东 张立强 范红超 曹林 王红
杨必胜 吴云东 程晓 习晓环 刘春 王程 王瑞胜 程明 康志忠 应申 李必军 李军
欢迎晚宴:厦门大学勤业餐厅三楼
主题:UAV-激光雷达系统 主持人:杨必胜、吴云东
8:20-8:40 分会场主题报告:南海岛礁点云集成与综合感知
张邵华 闫冰男 叶龙杰 周米玉 游昌斌
程亮
同济大学 北京建筑大学 首都师范大学 首都师范大学 厦门大学
南京大学
5月26日 8:209:55
8:40-8:55 8:55-9:10 9:10-9:25 9:25-9:40
王和平
17:35-17:50 高光谱激光雷达提取盆栽花卉生化组分垂直分布
高帅
18:00-19:30
欢迎晚宴:厦门大学勤业餐厅三楼
主题:激光雷达点云数据分割与分类(2) 主持人:刘 春、王 程
08:20-08:40 分会场主题报告:复杂场景敏捷感知与复合点云智能处理
刘春
5月26日 8:209:55
08:40-08:55 大规模点云数据与物联网数据融合应用 08:55-09:10 基于几何结构层次关系的建筑物结构线提取(参评论文 161) 09:10-09:25 基于深度学习的室内建筑物三维激光点云自动语义分割(参评论文 164)
史硕
5月25日 16:1517:50
16:35-16:50 分会场主题报告: 全波形激光雷达系统及数据应用 16:50-17:05 顾及波形特征贡献与池化尺度的土地覆盖分类方法(参评论文 9) 17:05-17:20 沙氏大气激光雷达技术及其应用研究
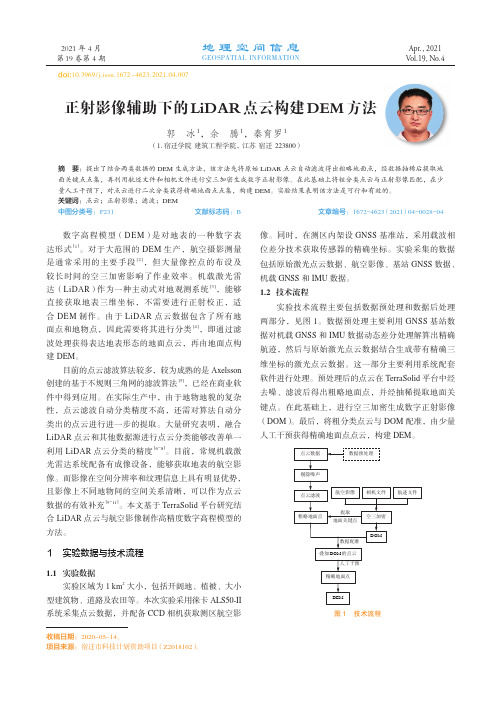
正射影像辅助下的LiDAR点云构建DEM方法
为保证地面点的准确性,首先控制 II 类误差,在此基 础上再尽可能降低 I 类误差。
可以看出,不规则三角网滤波算法能较好地维护
地形特征,减少地面损失,滤波精度较高。但该算法 对于低矮植被区域和小型建筑物密集区域的滤波效果
不是很好,需要不断调整滤波参数的设置。
2.2 DOM 生成
在 TerraPhoto 模块中,依据相机参数、POS 数据 和模型关键点数据进行空三加密获得影像外方位元素, 再通过逐片微分纠正生成 DOM。
目前的点云滤波算法较多,较为成熟的是 Axelsson 创建的基于不规则三角网的滤波算法 [5],已经在商业软 件中得到应用。在实际生产中,由于地物地貌的复杂 性,点云滤波自动分类精度不高,还需对算法自动分 类出的点云进行进一步的提取。大量研究表明,融合 LiDAR 点云和其他数据源进行点云分类能够改善单一 利用 LiDAR 点云分类的精度 [6-8]。目前,常规机载激 光雷达系统配备有成像设备,能够获取地表的航空影 像。而影像在空间分辨率和纹理信息上具有明显优势, 且影像上不同地物间的空间关系清晰,可以作为点云 数据的有效补充 [9-11]。本文基于 TerraSolid 平台研究结 合 LiDAR 点云与航空影像制作高精度数字高程模型的 方法。
低,在滤波过程中易被误分为地面点。区域 2 中水稻
生长高度低,许多田坎上的激光点被误分为植被。个
别地方还出现了数据空洞,这是由于激光点打在水面 上造成了漫反射。区域 3 为一栋大型建筑物,建筑物
高度比周边地面要高出很多,滤波效果良好,但其附
属建筑结构复杂,高低不一,对于墙体立面和面积比
较小的建筑物如烟囱部分,滤波效果不好,有些地面
3 结 论
本文提出了在 TerraSolid 平台上结合 LiDAR 点云 和航空影像的 DEM 生成方法。该方法表明在点云自动 滤波的基础上,结合正射影像对点云数据进行再次分 类,通过少量的人工编辑,可以有效提高滤波分类的 正确率,进而获得精确的地面点点集,生成的 DEM 能 够满足精度要求。因此在实际工程中,采用此方法能 在一定程度上提高 DEM 生产的精度和效率。但在正射 影像辅助下,如何提高点云精确分类的自动化程度还 需要作进一步研究。
雷达图和星图讲解课件
THANKS
感谢观看
REPORTING
星图的制作方法
数据准备
首先需要准备要展示的数据,通常需要将数据整理成表格形式,包括 维度名称和对应的值。
选择合适的图表类型
根据数据的性质和需求,选择适合的星图类型,例如雷达图、气泡星 图等。
绘制星图
使用可视化工具(如Excel、Tableau等)绘制星图,将数据点按照维 度名称和值进行绘制,调整角度和半径等参数,生成星图。
PART 05
总结与展望
REPORTING
总结
雷达图和星图是两种常用的数据可视化 工具,它们能够清晰地展示多维数据,
便于比较和分析。
在雷达图中,数据点被表示为一个多边 形,其顶点数等于变量数。星图则通过 将数据点投影到二维平面上,并使用标
记和连线来表示数据点之间的关系。
雷达图和星图在数据可视化领域中具有 广泛的应用,例如在金融、市场营销、 医学等领域。它们可以帮助用户更好地 理解数据,发现数据中的模式和趋势,
星图的应用场景
01
ቤተ መጻሕፍቲ ባይዱ02
03
数据对比
星图可以用于比较不同数 据点之间的差异,例如在 市场调研中比较不同品牌 的市场份额。
数据探索
星图可以用于初步探索多 维数据,帮助用户了解数 据的分布和关系,发现数 据中的模式和趋势。
数据可视化报告
在报告中,星图可以用于 展示多维数据,帮助读者 更好地理解数据的意义和 价值。
雷达图通常用于展示多维数据的综合 表现,而星图则更注重展示数据的分 布和变化趋势。
激光雷达与应用
Company Logo
激光雷达的应用— 激光雷达的应用—交通
在交通、输油气建设与维护中,激光雷达 在交通、输油气建设与维护中, 技术可以为公路、 技术可以为公路、铁路设计糖果高精度的 地面高程模型, 地面高程模型,以方便线路设计和施工土 方量的精确计算。 方量的精确计算。另外激光雷达技术能够 在进行通信网络、油管、 在进行通信网络、油管、气管等线路设计 时提供很大的帮助。 时提供很大的帮助。
激光雷达
激光雷达原理
激光雷达的工作原理 与雷达非常相近, 与雷达非常相近,以 激光作为信号源, 激光作为信号源,由 激光器发射出的脉冲 激光, 激光,打到地面的树 木、道路、桥梁和建 道路、 筑物上,引起散射, 筑物上,引起散射, 一部分光波会反射到 激光雷达的接收器上, 激光雷达的接收器上,
Company Logo
Company Logo
激光雷达的应用— 激光雷达的应用—交通
和常规的航空摄影测量相比, 和常规的航空摄影测量相比, 激光雷达技术在数据获取条 件方面具有独特的优势: 件方面具有独特的优势:不 会因阴影和太阳高度角而影 响高程数据精度, 响高程数据精度,不受航空 高度的限制;获得地面的信 高度的限制; 息更丰富;产品更加多样化。 息更丰富;产品更加多样化。 激光雷达技术为遥感领域开 辟了一种全新的数据获取手 段,随着激光雷达技术在交 通运输方面的广泛应用。 通运输方面的广泛应用。
由此可以看出直接探测型激光雷达的基本结构与激光测距机颇为相近companylogo激光雷达与摄影测量的区别激光雷达与摄影测量的区别植被穿透能力强可透过植被的狭小的空隙探测到被植被覆盖的地面真实地形数据丰富能采集到多种目标的信息生成丰富的用途广泛的产数据精度高激光具有极高的方向指向性不受航测高度的影响激光雷达具有数据密度高采集数据点距可达到015米甚至更小采集密度极大
《激光雷达数据处理》教学大纲
激光雷达数据处理一、课程说明课程编号:010536Z10课程名称:激光雷达数据处理/ The LIDAR Data Processing课程类别:专业教育课程学时/学分:32/2先修课程:遥感原理、计算机程序设计语言(C++)、图像处理、GIS图形算法基础或计算机图形学适用专业:地理信息系统、遥感科学与技术、测绘工程教材、教学参考书:1. 谢宏全等.地面三维激光扫描技术与工程应用,武汉大学出版社,2013.2. 张会霞等.三维激光扫描数据处理理论及应用,电子工业出版社,2012.3. 谢宏全等.基于激光点云数据的三维建模应用实践,武汉大学出版社,2014.4. 尤红建.激光三维遥感数据处理及建筑物重建,测绘出版社,2006.二、课程设置的目的意义该课程是遥感科学与技术、地理信息系统、测绘工程专业的选修课程。
目的是使学生掌握测绘高新技术,掌握激光雷达技术的基本概念、方法、原理及数据后续处理各种技巧,培养和增强学生创新意识和创新思维,提高实际动手能力和创新能力。
通过本课程的学习,增强学生在测绘、地质和逆向工程等领域发现问题、解决问题的能力。
三、课程的基本要求知识:掌握激光雷达数据处理的基本概念、原理及基本实现方法、具体步骤等知识;掌握典型点云的存储结构,学会应用软件工具实现点云数据的读取与显示,掌握点云数据误差及去除、点云数据精简、点云数据分割与分类、点云数据特征提取、目标识别和三维重建等内容的基本原理、方法及具体实现步骤,建立数据、处理及应用的基本思维方式,形成数据-特征-提取-识别与重建的基本知识结构。
能力:从应用的角度研究新的激光雷达数据处理方法和功能,将激光雷达数据处理的知识进行定量研究和解决地理实际问题;培养结合地理信息系统平台软件,运用数理分析方法和计算机技术进行定量研究和解决地理信息系统工程行业复杂问题能力;掌握最基本的激光雷达数据处理理念,针对具体问题提出有效的解决方案,提高解决实际问题的能力;在激光雷达数据处理与图像处理、信号处理等交叉知识的讨论中培养创新意识,提高分析、发现、研究和解决问题的能力。
第3讲LiDAR数据获取基本原理(2)1-系统关键技术
13
记时误差 如果所接收的激光幅值很低,电压值未调整到 与发射时相同电压值,所记录时间就会过长! 一般在记时器的前端安置一个放大器进行信号调 整 为避免因激光幅值变化造成记时错误 采用分数鉴别器,代替阈值鉴别器 按信号峰值的比例系数作为记时参照常量
14
最大量测距离: 采用激光器发射激光脉冲时要考虑,避免最远 目标所反射的激光束还未返回就发射下 束激光 目标所反射的激光束还未返回就发射下一束激光 需要考虑可能的最大量测距离 与最远的目标有关 地形起伏?
8
关键技术
激光测距技术 全球定位系统技术 球定位 统技术 惯性测量系统技术 高性能二维扫描技术
9
第一节 激光测距 基本原理 本
测量激光往返目标所需要时间,然后通过光速c ( 299792458m/s) 和大气折射系数 计算出距离
10
第一节 激光测距
1、信号形式 1)脉冲测距 )脉冲测距 发射脉冲波 测量脉冲信号往返时间差
41
关键技术
激光测距技术 全球定位系统技术 球定位 统技术 惯性测量系统技术 高性能二维扫描技术
42
全球定位系统技术
全球定位系统(GPS, Global Position System): 是一种利用人造地球卫星进行点位测量导航的 是 种利用人造地球卫星进行点位测量导航的 技术。
全称是NAVSTAR GPS( GPS(NAVigation NAVigation Satellite Timing And Ranging Global Positioning System) 。
PT p peak
E pulse t pulse
PTav t pulse f pulse
假定脉冲频率为150KHz,脉冲平均功率为 脉冲平均功率为10W, 脉冲宽度为10ns,则发射功率峰值为6670W。 可见 尽管平均功率不大 脉冲激光测距能够产 可见,尽管平均功率不大,脉冲激光测距能够产 生很高的峰值功率;
星载激光雷达CALIOP数据处理算法概述
别、 场景 分 类和 消光反 演 的算 法原理 和 流程 。 关键 词 :星载激 光 雷达 C A L I O P ; 数据 产 品 ; 层 次识 别 ; 场景 分 类 ; 消光 反 演
中 图分类 号 : T N 9 5 8 . 9 8 文 献标 志码 : A D OI :1 0 . 3 7 8 8 / I R L A2 0 1 7 4 6 . 1 2 0 2 0 0 1
r e t r i e v a l y e mp ha s i z e d .
Ke y wo r d s :s p a c e b o r ne l i d r a CALI OP; d a t a p r o d u c t s ; l a y e r d e t e c t i o n; s c e n e c l a s s i ic f a t i o n;
Da t a p r o c e s s i ng a l g o r i t h ms o f t he s p a c e — b o r n e l i d a r CALI oP:a r e v i e w
L i u Do n g , L i u Qu n ,Ba i J i a n , Z h a n g Yu p e n g
( S t a t e Ke y L a b o r a t o r y o f Mo d e m O p t i c a l I n s t r u me n t a t i o n ,C o l l e g e o f O p t i c a l S c i e n c e a n d E n g i n e e r i n g
e x t i n c t i o n r e t r i e v a 】
Lidar数据处理(文字原理)
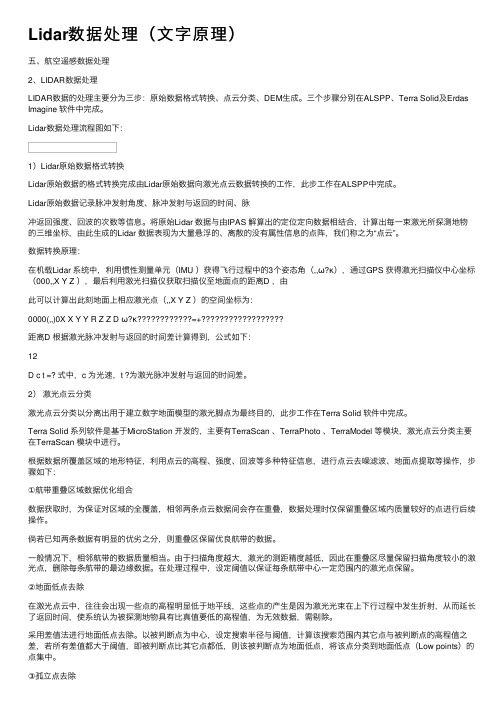
Lidar数据处理(⽂字原理)五、航空遥感数据处理2、LIDAR数据处理LIDAR数据的处理主要分为三步:原始数据格式转换、点云分类、DEM⽣成。
三个步骤分别在ALSPP、Terra Solid及Erdas Imagine 软件中完成。
Lidar数据处理流程图如下:1)Lidar原始数据格式转换Lidar原始数据的格式转换完成由Lidar原始数据向激光点云数据转换的⼯作,此步⼯作在ALSPP中完成。
Lidar原始数据记录脉冲发射⾓度、脉冲发射与返回的时间、脉冲返回强度、回波的次数等信息。
将原始Lidar 数据与由IPAS 解算出的定位定向数据相结合,计算出每⼀束激光所探测地物的三维坐标,由此⽣成的Lidar 数据表现为⼤量悬浮的、离散的没有属性信息的点阵,我们称之为“点云”。
数据转换原理:在机载Lidar 系统中,利⽤惯性测量单元(IMU )获得飞⾏过程中的3个姿态⾓(,,ω?κ),通过GPS 获得激光扫描仪中⼼坐标(000,,X Y Z ),最后利⽤激光扫描仪获取扫描仪⾄地⾯点的距离D ,由此可以计算出此刻地⾯上相应激光点(,,X Y Z )的空间坐标为:0000(,,)0X X Y Y R Z Z D ω?κ=+??????距离D 根据激光脉冲发射与返回的时间差计算得到,公式如下:12D c t =? 式中,c 为光速,t ?为激光脉冲发射与返回的时间差。
2)激光点云分类激光点云分类以分离出⽤于建⽴数字地⾯模型的激光脚点为最终⽬的,此步⼯作在Terra Solid 软件中完成。
Terra Solid 系列软件是基于MicroStation 开发的,主要有TerraScan 、TerraPhoto 、TerraModel 等模块,激光点云分类主要在TerraScan 模块中进⾏。
根据数据所覆盖区域的地形特征,利⽤点云的⾼程、强度、回波等多种特征信息,进⾏点云去噪滤波、地⾯点提取等操作,步骤如下:①航带重叠区域数据优化组合数据获取时,为保证对区域的全覆盖,相邻两条点云数据间会存在重叠,数据处理时仅保留重叠区域内质量较好的点进⾏后续操作。
激光雷达信号与数据处理(6).ppt
激光雷达技术(6)
信号处理(以激光测风雷达为例)
航天学院
信号处理的目的和要求
1. 激光雷达气象回波信号特点: – 夹杂在各种杂波中的强度很弱、脉动很强、语宽较宽的随机信号。这 种信号的特点决定了雷达信号处理是从各种杂波中提取微弱有用信号 ,并使有用信号具有统计平均意义的过程。 2. 提高微弱信号检测能力、减小脉动和进行质量控制。
sr (t ) a(t )ei (t )ei0t a(t )ei (t )
是针对散射体的积分结果,是载波的包络信号,包含 散射体的强度和速度信息
航天学院
该式可以改写成如下形式:
I (t ) a(t ) cos (t ) Q(t ) a(t ) sin (t ) sr (t ) I (t ) cos(0t ) Q(t ) sin(0t )
为鉴相),得到正交I,Q两路信号。
5. I.Q信号经过取样、滤波等处理后送至信号处理单元。 航天学院
距离库的划分
1. 为了获得距离(高度)信息,在 每次脉冲发射后的接收期间, 需要进行距离库的划分,距离 库也称为数据库或取样体积。 2. 距离库的划分是利用距离门电
路对连续的回波信号以脉冲宽
度?为时间间隔进行采样。 3. 信号处理针对距离库进行.对 每个距离库的多次取样进行处 理,从中提取表征取样体积散 射强度与运功速度等信息。
度以及速度谱宽。
–激光测风雷达通常采用快速博里叶变换(FFT)方法对相干积分后 得到的数据进行频率变换。
–样本数一般取2n个(n为整数)。
–用于FFT的数据个数称为谱变换点数(简称谱点数),记为NSP (number of spectral points)。
航天学院
−若以s(t)表示回波的电压信号,以F(f)表示s(t)的傅里叶变换,称
地理信息系统-操作指南-星载雷达极化数据处理与解译
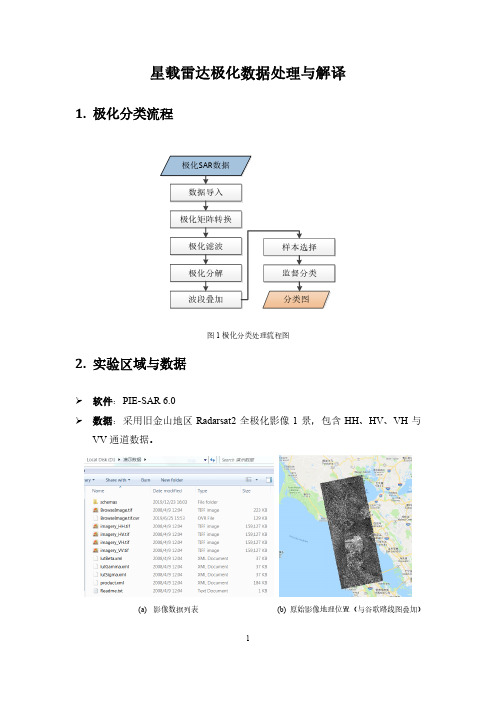
星载雷达极化数据处理与解译1.极化分类流程极化SAR数据数据导入分类图极化矩阵转换极化滤波极化分解波段叠加样本选择监督分类图1极化分类处理流程图2.实验区域与数据软件:PIE-SAR 6.0数据:采用旧金山地区Radarsat2全极化影像1景,包含HH、HV、VH与VV通道数据。
(a)影像数据列表(b) 原始影像地理位置(与谷歌路线图叠加)图2原始影像数据3.详细操作步骤3.1.Radarsat2全极化数据导入Radarsat-2数据导入功能主要用于将Radarsat-2数据导入成PIE-SAR软件标准数据格式。
选择菜单栏【数据导入】→【单景数据导入】→【RS-2】,打开“Radarsat2数据导入”对话框。
图3 Radarsat2数据导入菜单图4 Radarsat2数据导入对话框界面●【参数文件】:输入待处理Radarsat-2数据文件对应的参数文件(product.xml)。
●极化通道选择:包括HH、HV、VH、VV四类极化选项;当导入头文件后,软件会自动读取相应的极化通道数据,用户可根据需要处理的极化数据类型进行勾选;●【输出文件名前缀】:可以选择用成像日期作为文件名前缀,也可以选择自定义前缀;●辐射校正类型:选择输入待处理Radarsat-2数据文件对应的定标类型,包括Beta, Gamma, Sigma三种类型;●【输出文件数据类型】:目前软件支持输出ENVI img、ERDAS img、GeoTIFFFiles(*.tif、*.tiff)格式;●【输出目录】:设置输出结果的保存路径。
图5 Radarsat2数据导入结果3.2.极化矩阵转换3.2.1.极化矩阵转换极化散射矩阵([S])只能够描述所谓的相干或纯散射体,对于分布式散射体,通常采用二阶描述子进行描述,将极化散射矩阵([S])转换为极化协方差矩阵([C3]/[C4])或极化相干矩阵([T3]/[T4])。
极化协方差矩阵也称为复埃尔米特矩阵,同极化散射矩阵一样,包含了雷达测量得到的全部目标极化信息。