汽车定速巡航控制系统模拟设计说明
定速巡航小车设计与制作

定速巡航小车设计与制作
要设计和制作一个定速巡航小车,需要以下步骤:
1. 确定要使用的控制器和电机,这将影响小车的速度和控制方式。
可以选择Arduino控制器和直流电机。
2. 创建小车底盘,可以使用3D打印或机械加工方式制作。
底盘应该能够支撑控制器、电机和电池等组件,并提供安装轮子和传感器的空间。
3. 安装电机和电池,根据底盘的设计和电路图连接所有电气组件。
4. 为小车安装轮子,可以选择常规车轮或马达带轮。
5. 添加能够控制小车方向的舵机,也可以使用两个马达来控制左右轮子的运动。
6. 使用红外线传感器或超声波传感器来检测小车前方的障碍物,并编写程序控制小车的行驶。
7. 编写程序来实现小车的定速巡航功能,可以使用PID算法来控制小车的速度。
8. 测试小车的性能并进行调整,确保它可以在不同的地形和环境中正常运行。
通过以上步骤制作出一个定速巡航小车,可以用于自动化导航等应用场景。
车辆控制巡航系统设计方案

车辆控制巡航系统设计方案背景介绍随着汽车行业的快速发展和人们对安全驾驶的需求不断提高,车辆控制巡航系统已经成为汽车电子控制系统的一个重要组成部分。
这种系统可以自动控制车速,保持安全距离,并且在必要时对车辆进行制动或操纵以避免碰撞。
它可以极大地减少交通事故的发生和驾驶员的疲劳程度,提高驾驶安全性和舒适性。
系统概述本系统使用前视摄像头和激光雷达进行距离和速度测量,同时通过车辆CAN总线获取车辆的速度和方向。
通过控制发动机的油门和制动系统、转向系统以及自动变速器,实现车辆的自动巡航。
此外,本系统还可以与导航系统进行配合,提供更准确的路线和出行计划。
系统设计首先,需要进行硬件的设计。
本系统需要使用一台计算机来处理获取到的原始数据,并对车辆的控制指令进行处理。
可以选择使用嵌入式系统或者单片机等低成本的硬件平台,兼顾系统性能和经济效益。
此外,还需要选择适合的距离和速度测量传感器,前视摄像头和激光雷达是比较常用的传感器。
接下来,进行软件的设计。
本系统采用C/C++语言进行编程,其中包括传感器数据采集、数据处理、车辆控制算法以及通信协议设计等。
需要高精度地计算车和障碍物之间的距离、速度和方向等参数,并通过编写相关算法实现自动巡航功能。
可以使用一些成熟的控制算法,例如PID控制算法、模糊控制算法等。
为了兼容不同类型的车辆和传感器,还需要设计合适的通信协议来实现各个模块之间的数据通信和协作。
最后,进行系统测试和优化。
测试需要模拟各种场景下的驾驶情形进行测试,包括城市、高速、弯道、交叉口、隧道和夜间等情况。
在测试结束后,对系统进行优化,包括提升控制算法的精确度、提高数据采集和处理效率、优化系统稳定性等。
结论车辆控制巡航系统设计方案可以有效地提高驾驶安全性和舒适性,为驾驶员提供更加智能化、方便和舒适的驾驶方式。
在设计过程中,需要充分考虑硬件和软件的兼容性,设计出合适的传感器、控制算法和通信协议等。
通过测试和优化可以进一步完善系统设计,并提高系统的稳定性和可靠性。
电动汽车定速巡航控制系统设计
电动汽车定速巡航控制系统设计电动汽车定速巡航控制系统设计近年来,随着环境保护意识的增强和能源危机的出现,电动汽车作为一种清洁、高效的交通工具逐渐受到广大消费者的认可和选择。
然而,与传统燃油汽车相比,电动汽车在长途行驶中面临着续航里程有限的问题,这给用户的使用带来了一定的限制和不便。
为了解决这一问题,电动汽车定速巡航控制系统应运而生。
电动汽车定速巡航控制系统旨在实现电动汽车在高速公路等长距离行驶时的自动巡航功能,提供更舒适和便利的驾驶体验。
该系统通过自动调整车辆的速度和动力输出,使得汽车在设定的速度下稳定行驶,从而减少车辆驾驶员的操作,提高驾驶的安全性和稳定性。
电动汽车定速巡航控制系统设计主要包括四个方面的内容:速度检测模块、控制算法、执行机构和人机交互界面。
首先,速度检测模块是电动汽车定速巡航控制系统的基础,它可以通过传感器实时检测车辆的行驶速度,并将检测的数据传输给控制算法模块。
通过准确检测速度,控制系统可以根据设定的目标速度来调整动力输出,实现定速巡航功能。
其次,控制算法是电动汽车定速巡航控制系统的核心。
它根据速度检测模块提供的数据,计算出车辆与目标速度之间的差值,然后通过分析和判断,控制动力系统输出的电能,使得车辆能够稳定地按照设定的速度行驶。
控制算法还可以结合车辆的负载情况、道路条件等因素进行优化,提高行驶的效率和舒适度。
第三,执行机构是将控制算法产生的指令转化为实际动力输出的关键环节。
它根据控制指令,调整电动汽车的电机输出功率,使得车辆能够按照设定的速度行驶。
在电动汽车定速巡航控制系统中,电机控制器是执行机构的核心组成部分,它通过调节电机的转速和扭矩,实现定速巡航的功能。
最后,人机交互界面是电动汽车定速巡航控制系统与驾驶员进行信息交流和操作的界面。
它可以通过仪表盘上的显示屏提供目前行驶速度、设定巡航速度等信息,驾驶员可以通过操作按钮或转动控制杆来设定和调整巡航速度。
人机交互界面的设计应该简洁明了、易于操作,以提高驾驶员使用的便捷性和用户体验。
汽车自动巡航技术(定速巡航自动控制系统)讲解

汽车自动巡航技术(定速巡航自动控制系统)讲解汽车定速巡航自动控制系统(CCS)在高速长途行驶时,可采用常速巡行自动控制系统,恒速行驶装置将根据行车阻力自动调整节气门开度,驾驶员不必经常踏油门以调整车速。
若遇爬坡,车速有下降趋势,微机控制系统则自动加大节气门开度;在下坡时,又自动关小节气门开度,以调节发动机功率达到一定的转速。
当驾驶员换低速挡或制动时,这种控制系统则会自动断开。
汽车自动巡航技术(定速巡航自动控制系统)很多人都被迫天天面对着拥堵的用车环境,在他们眼中,定速巡航是非常鸡肋的一项功能,车买了好几年,但巡航功能一次没用过的大有人在。
那么,巡航功能真的就这般无用,甚至连试一试的必要都没有吗?答案当然是否定的。
北京被戏称为“首堵”,500万辆机动车的保有量,确实让原本宽阔的道路变得拥挤不堪。
但不可否认的是,在非高峰时期或车流量相对小的地段,跑到80-90公里的最高限速并非不可能。
而对于外地朋友来说,或许在城市中难得有机会超过60公里/小时,但是每年总得跑些高速吧。
所以,配置有巡航功能的车肯定是有用的,关键在于了解使用巡航能带来什么好处,只有尝到了甜头的人们,才会不断去尝试。
巡航的最大优势:能减轻长时间驾驶的疲劳;提高车辆的经济节油表现。
如果你对这两点感兴趣,那不妨系统的了解巡航控制功能。
你知道巡航控制功能最早出现在什么时候吗?是1788年,只不过当时是运用在蒸汽机车上,用来在爬坡和下坡时保持匀速。
但是所谓的现代汽车巡航系统发源于美国,从1945年被发明,到1958年第一次装配在量产车上至今已是半个世纪了。
简单的说巡航控制系统就是通过监测车速传感器,并比对所设定的巡航数据,不断调整适合的油门(节气门)开度,以保持车辆匀速行驶。
但在目前的科技环境中,巡航控制绝不是如此简单的一套理论,它早已从最传统的拉线式控制演变为全电子式控制,并且,现在市面上的高端车(车联网)都开始配置自适应巡航系统(主动巡航),能自动保持设定的前车距离,必要时会紧急制动确保安全。
智能车辆自适应巡航控制系统设计

智能车辆自适应巡航控制系统设计随着科技的发展和人们生活水平的提高,汽车成为了大多数人出行的必需品。
但是,随着如此多人使用汽车,交通拥堵、事故和污染等问题也随之而来。
为了解决这些问题,智能车辆的概念应运而生。
智能车辆是指配备了先进的传感器、计算机、通讯系统和控制系统的汽车,可以自主运行、感知周围环境、做出决策并执行任务。
而智能车辆自适应巡航控制系统就是其中一个重要的应用,它可以让汽车根据路况和实时交通情况调整巡航速度和距离,从而提高行车安全性和燃油经济性。
本文将探讨智能车辆自适应巡航控制系统的设计和原理。
一、智能车辆自适应巡航控制系统的作用智能车辆自适应巡航控制系统的主要作用是根据车辆所处的环境条件和实时交通情况,自动控制车辆的速度和距离,从而减少驾驶员的工作量并提高行车安全性和燃油经济性。
该系统利用车载传感器和地面交通信号控制系统收集路况和交通信息,并通过车辆自身的计算机处理这些数据,操纵车辆的油门、制动和转向,以保持车辆的速度和距离。
二、智能车辆自适应巡航控制系统的原理智能车辆自适应巡航控制系统的工作原理主要包括两部分:车辆位置和状况的感知(即数据采集),以及基于感知数据的控制策略的制定与执行。
1、数据采集车辆位置和状况的感知主要通过车辆传感器来实现。
传感器通常分为激光雷达、摄像头、惯性测量单元、超声波传感器、雷达等多种类型。
这些传感器会不断地扫描车辆周围的环境,收集路况和交通信息,例如周围车辆的速度、距离、方向和加速度等。
2、控制策略的制定与执行感知数据的处理和控制策略的制定和执行是智能车辆自适应巡航控制系统的核心。
该系统需要根据车辆周围的路况和交通情况,制定相应的控制策略来调整车速和距离。
比如,在高速公路上,车辆应该保持一定的巡航速度,而在城市道路上则应该减速,以应对交通密集的情况。
控制策略的主要目标是优化车速、车距和舒适性。
具体来说,该系统首先通过传感器获取前方车辆的速度和距离,然后搭配自身车速和制动状态,根据巡航距离和巡航速度来计算出应达到的车距和速度,再以控制策略来操纵车辆的油门、制动和转向等部件,使车辆保持在合适的速度和距离上,保持车辆的行车安全和舒适性。
汽车巡航控制系统使用指南说明书

Cruise ControlMaintain a constant vehicle speed without having to keep your foot on the accelerator pedal. Use cruise control on freeways or open roads where you can travel at a constant speed with little acceleration or deceleration.n Activating and Setting the Vehicle Speed1.Press the CRUISE button. The CRUISEMAIN indicator appears.2.Accelerate to the desired speed (above 25mph/ 40 km/h). Take your foot off thepedal and press the RES/+/SET/- buttonto set the speed. The CRUISE CONTROLindicator appears.n Adjusting the Vehicle SpeedPress the RES/+ button to increase speed orthe -/SET button to decrease speed.Each time you press the switch up or down, the vehicle speed is increased or decreased by about 1 mph (1.6 km/h). If you keep the switch pressed up or down pressed, thevehicle speed increases or decreases untilyou release it.n Canceling Cruise ControlPress the CANCEL button, the MAIN buttonor the brake pedal. The CRUISE CONTROLindicator goes off.After cruise control has been canceled, you can still resume the prior set speed bypressing the RES/+/SET/– switch up whiledriving at a speed of at least 25 mph (40 km/h).Improper use of cruise control can lead to a crash.Use cruise control only when traveling on open highways in good weather.。
汽车定速巡航控制装置的设计

4科技资讯 SC I ENC E & TE C HN O LO G Y I NF O R MA T IO N 高 新 技 术图1 巡航控制装置主程序流程图1 研究的背景及意义如今,电子技术的发展与应用赋予了汽车更多的功能,许多新兴的技术应运而生。
汽车定速巡航系统(缩写CCS)是一种减轻驾车者疲劳的装置。
当汽车在长距离的高速公路行驶时,启动速度控制系统就可以自动将汽车速度控制在特定的速度上,免除驾车者长时间脚踏油门踏板之苦。
另外还有节省燃料和减少排放的优点。
定速巡航系统自20世纪60年代在美国应用以来,已广泛使用在汽车上,欧洲和日本多数中高档轿车都装有速度控制系统。
目前国内尚无批量生产厂家,国内轿车配装的定速巡航器全部依赖进口,由于价格昂贵,只有少数高档轿车才配备有定速巡航系统。
而随着我国汽车行业已经进入快速发展时期,定速巡航系统定将会在中低端汽车上得到广泛应用,这是一个充满潜力和机会的大市场。
2 系统工作原理和控制技术分析汽车巡航控制系统原理。
它主要由控制器、节气门执行器、传感器和操纵开关等组成。
控制器有两个输入信号,一个是驾驶员按要求设定的指令车速,直接由驾驶员设定,另一个是实际车速的反馈信号,有车速传感器检测后反馈给控制器,控制器检测这两个输入信号之间的偏差后,经过一定的控制计算,产生一个送至节气门执行器的控制信号,节气门执行器根据所接收到的节气门控制信号调节发动机节气门开度,从而使车速保持稳定。
作为巡航控制系统的核心部件——控制器,它所采用的控制技术对控制结果的好坏是至关重要的。
随着现代控制理论的发展,汽车巡航控制技术也在不断发展,如何采用合理的控制技术,是汽车工作者需要研究和解决的问题。
目前用于汽车巡航控制的技术主要有PID控制、模糊控制、迭代学习控制、自适应控制等,它们都有各自的优缺点。
目前在工业控制中,PID控制算法是一种被广泛应用的控制方法,PID控制具有结构简单、稳定性好、可靠性高等优点,在许多场合下都能取得令人满意的控制效果。
汽车自适应巡航的电机控制系统设计

AUTOMOBILE DESIGN | 汽车设计1 上层加速度控制器的设计自适应巡航控制器分为上下两层,上层控制器主要包含了PID控制,模糊控制两个部分。
因上层控制器输出汽车期望加速度,而下层控制器利用得到的期望加速度输出转矩,针对上层而言,计算期望加速度的算法决定了输出期望加速度的效果。
期望加速度应该在稳定性上提出较高要求,兼顾准确性与快速性。
2 定速巡航模式中的PID算法设计速度控制算法使汽车在行驶过程中的车速接近设定的行驶速度。
本文目标行驶速度采用定速模式情景,目标行驶速度为驾驶员人为设定速度。
速度控制算法的实现过程如下:将车速传感器输入汽车当前行驶的车速,与驾驶员人为标定的速度的差值,输入到控制器中,输出为电机的转矩并将这一参数作为输入量输入到开关磁阻电机中,使汽车达到设定的目标行驶速度。
因PID控制本身难度较小,稳定性强,所以选用此种算法来实现对速度的控制。
在本次设计中对PID控制器的比例系数Kp选用15.331,微分系数Kd选用0.112,积分系数Ki选用0.012,在Simulink中建模,对P,I,D三个参数加以调整仿真发现:系统在短时间内输出稳定在1.812m/s2的加速度a-ses,稳定性良好,满足实际需求。
当加速度数值较高时会严重影响驾驶员与乘客的乘车舒适性。
根据Moon Seungwuk 等人分析驾驶员的主观评价与行车数据,发康惠铭monash university Malaysia摘 要:自适应巡航系统(ACC)利用汽车周围的雷达来检测该汽车周围的情况,对车前某一区域的车速与距离进行判定,自动对车辆速度与跟车距离进行调节。
本设计从MATLAB仿真软件出发,对汽车自适应巡航系统的上层控制器和驱动电机进行设计,在Simulink中得到了稳定性强,抗干扰性能高的电机模型;在MATLAB的模糊推理系统中得到了输入D r(两车距离),V r(两车速度)与输出加速度a-ses的三维数学模型,从MATLAB的三维模型中可知,该上层控制器曲面光滑程度较好,表明输出接近连续;曲面的起伏较为平缓,表明性能优良,符合设计应用需求。
汽车巡航控制系统设计

第1章绪论1.1 课题背景和发展概况随着汽车技术的发展以及各种高新技术在汽车上的广泛应用,使汽车已经由一个传统的机械装置逐渐演变成一个集机械、电子、计算机控制、通信等技术于一体的复杂系统。
本课题所要研究的巡航系统是这个复杂系统的一部分。
在当前全球气温变暖、污染程度骤增、石油资源锐减的背景下,因此巡航控制系统在汽车上应用也越来越多[1],一些厂家根据广阔市场的前景,逐步开发出性能优异的巡航系统。
从20世纪50年代,美国和日本相继研制出以模拟信号为主的巡航控制系统开启了该领域的大门,之后,德国的VDQ公司也研制出气动机械式巡航系统,1968年奔驰公司开发了晶体管控制的巡航系统,并在莫克利汽车上应用[2]。
70年代中后期,以数字信号为主的控制系统诞生,这时单片机技术和集成电路技术为优异的控制系统提供了强大的基础。
美国摩托罗拉公司研制的一种采用微处理器控制的巡航系统,标志着巡航系统进入一个新的技术领域。
进入21世纪,智能化为核心的汽车巡航系统和以定距离控制为主的自适应巡航控制系统诞生了,美国鲁卡斯公司研制出了自动恒速智能控制系统,该系统采用连续调频微波雷达,通过雷达探测前方车辆和本车的距离,计算出相对车速和距离,并将该信息提供给电控单元,通过执行器和制动器来控制车速[3]。
目前高级轿车已把巡航系统作为主要附加功能设备。
1.2 汽车巡航系统技术的概述汽车巡航控制系统,又称汽车速度控制系统,是指在一定得车速范围内,驾驶员不用控制加速踏板而能使汽车保持以设定的速度行驶的控制装置[4]。
简单的概述巡航技术,当驾驶员开启巡航系统,进入巡航状态并设定巡航车速后,微处理器通过车速传感器自动记忆设定的巡航车速。
当重新设定巡航车速时,微处理器可将原设定的车速消除并记住新设定的车速。
在巡航状态,微处理器不断将汽车行驶中各个时刻的车速进行检测,并和它记忆中的人为设定车速做比较运算,从而作为调节控制的基础。
当实际车速低于设定车速的时候,微处理器控制电动机驱动节气门向开度增大的方向转动,是车速升高;当实际高于设定的车速时候,微处理器控制电动机节气门向开度减小的方向转动,使车速降低。
车辆定速巡航控制系统的设计
车辆定速巡航控制系统的设计
车辆定速巡航控制系统是一种能够实现车辆在高速公路等直路
上保持一定车速,无需驾驶员踩油门踏板的自动驾驶系统,可以提
高驾驶的舒适性和安全性。
下面是该系统的设计步骤:
1. 传感器选择:选择合适的传感器来检测车速、距离、方向盘
转动角度以及车道偏移等参数,比如雷达、激光传感器、视觉传感
器等。
2. 控制器设计:设计控制器来实现巡航控制功能,包括转速控制、方向盘控制、刹车控制等。
3. 车速测量模块设计:根据车辆的实际情况和传感器测量数据,设计车速测量模块来实现车速的精确测量。
4. 巡航功能实现:根据驾驶员的选择,控制器将根据车速和距
离来自动调整车速和加速,保持车辆在预定速度和距离范围内。
5. 碰撞监测和刹车系统:设计碰撞监测和刹车系统来检测前方
障碍物并自动降低车速或刹车以避免碰撞。
6. 用户界面设计:设计一个直观的用户界面,使驾驶员可以轻
松地选择巡航控制、设置巡航速度、调整车速等。
需要注意的是,实现车辆定速巡航控制系统需要多方面的技术
和设备,涉及到控制、传感、检测和监控等领域,因此需要全面考
虑系统的可靠性和安全性。
基于单片机的汽车巡航控制系统的建模与仿真

基于单片机的汽车巡航控制系统的建模与仿真作者:秦世林黄宇飞刘江东张见广来源:《企业科技与发展》2021年第09期【关键词】单片机;定速巡航;PID控制;燃油经济性【中图分类号】U463.6 【文献标识码】A 【文章编号】1674-0688(2021)09-0037-050 前言汽车巡航控制系统是控制速度稳定的一种辅助驾驶员驾驶车辆的系统。
当驾驶员驾驶车辆时,车速一旦到达设定的巡航系统开启的最低速度后,只需打开巡航开关,再按下巡航速度设定键,汽车将按设定的行驶速度稳定行驶。
若要更改巡航速度,只需按下巡航控制系统的速度调节按钮即可。
此时,驾驶员不需要操控油门踏板,仅通过汽车电子控制单元ECU调控汽车行驶速度,从而减轻驾驶员的精神负担。
随着社会经济的发展,中国进入了小康社会,汽车随着经济的发展逐渐走进人们的生活,或为人们的日常代步工具。
伴随智能交通系统的不断推广,这种能有效减轻驾驶员驾驶汽车的疲劳程度,从而减少因驾驶员失误操作而造成的交通事故的产品在普通家庭轿车上的应用将急剧增长。
对驾驶员来说,该产品提高了汽车的驾驶安全性和燃油经济性;对社会来说,该产品改善了交通状况。
近年来,汽车巡航控制系统得到政府、企业及高级研究机构的广泛关注。
此外,随着我国对于基础建设的重视,以道路交通发展促进我国经济快速发展,我国高速公路四通八达,汽车巡航控制系统具有良好的应用前景。
1 汽车巡航控制系统原理及功能1.1 汽车巡航控制系统原理在实体的汽车巡航控制系统中,汽车电子控制单元ECU根据各传感器传来的信号,经过处理后判断路况条件的变化,然后经过计算得到节气门开度的变化量,汽车电子控制单元ECU再控制节气门执行器调节节气门开度,使车辆以恒定速度稳定行驶,汽车巡航控制系统的基本控制原理如图1所示。
1.2 汽车巡航控制系统功能目前,市面上绝大部分的汽车巡航控制系统,主要由电子控制单元ECU、巡航控制开关、车速传感器、节气门执行器等组成[1]。
汽车巡航系统PID控制器设计
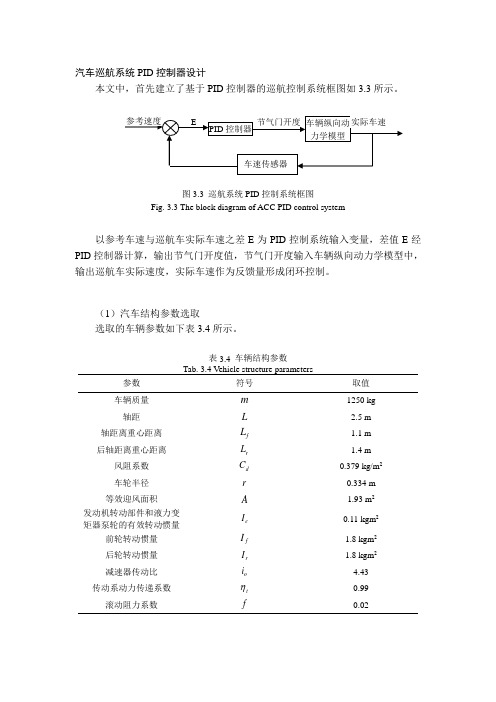
汽车巡航系统PID控制器设计本文中,首先建立了基于PID控制器的巡航控制系统框图如3.3所示。
图3.3 巡航系统PID控制系统框图Fig. 3.3 The block diagram of ACC PID control system以参考车速与巡航车实际车速之差E为PID控制系统输入变量,差值E经PID控制器计算,输出节气门开度值,节气门开度输入车辆纵向动力学模型中,输出巡航车实际速度,实际车速作为反馈量形成闭环控制。
(1)汽车结构参数选取选取的车辆参数如下表3.4所示。
表3.4 车辆结构参数Tab. 3.4 Vehicle structure parameters参数符号取值车辆质量m1250 kg轴距L 2.5 m 轴距离重心距离f L 1.1 mL 1.4 m 后轴距离重心距离rC0.379 kg/m2风阻系数d车轮半径r0.334 m等效迎风面积A 1.93 m2发动机转动部件和液力变I0.11 kgm2矩器泵轮的有效转动惯量e前轮转动惯量f I 1.8 kgm2I 1.8 kgm2后轮转动惯量r减速器传动比o i 4.43 传动系动力传递系数t 0.99滚动阻力系数f0.02(2)仿真工况设计论文设定仿真时间140s,设计了多种仿真工况,包括低速行驶状态下匀加速、匀速,高速行驶状态下匀加速、匀速及匀减速工况。
具体描述为初始时刻巡航车静止,前方目标车辆以12km/h起步并以0.8m/s2加速度加速至20km/h,然后以此速度匀速前进30s,在40s时再以1.5 m/s2加速至80km/h,保持80km/h速度匀速前进至120s,最终再以-0.5m/s2匀减速行驶。
汽车巡航系统PID控制仿真模块,它由纵向动力学模块及其控制器模块组成。
纵向动学模块包括发动机模块、液力变矩器模块、自动变速器模块以及车辆传动、行驶系及整车运动系统模块。
车辆纵向动力学模块仿真框图图中,FDJ——发动机子模块;YLBJQ——液力变矩器模快;CD——传递模块;CLDLX——车辆传动、行驶系及整车运动系统模块。
汽车巡航控制系统的软件设计与仿真
动强度 ,提高了行驶舒适性 】 .由于必须考虑外界环境和汽车本身状况这两个 因素 ,巡 航控制系统的设计非常复杂.从 2 0 世纪 6 0 年代开始 ,国外各著名汽车厂商相继对巡航 控 制系统 进 行研 制 ,历 经机械 式 、数 字式 、智 能化 自适 应式 等 阶段 的发展 ,该 系 统 已成 为 了 中高档 汽车 上 的热 门装置 ,但 进 口配 置成本 较 高 .相 比较而 言 ,国内汽 车工 业起 步
较 晚 ,所 研 制 的巡航 控 制系统 控 制精 度不 高 ,稳 定 性不 强口 1 . 在 维持 巡航 控制 系统 原有 成 本 的前 提 下 ,改进 其 软件设 计 方 案是 提 高系 统性 能 的有
效方式.例如 ,有研究将模糊控制技术或遗传算法引入数字式巡航控制系统的软件核心 控制策略一 比例积分微分 P I D ( P r o p o r t i o n a l I n t e g r a l D e r i v a t i v e ) 调节方式 中,使系统控制
了各 功能 模 块 的软 件设 计方 案 ,在 车速 调 整模 块 中 ,对 其 增 量 式 P I D算 法 加 以 条件 限 制 ,以增 强 系统 的响应 速度 和稳定 性 ,最后 给 出 了以 C语 言 实现 的部分 程序 示 例及仿 真
调试 结果 . 实验结 果表 明 ,改 进 的增量 式 P I D算法 是有 效 的 ,整 个 系统 的巡 航控 制效 果 良好 ,是 一种较 为 经济 实用 的巡航 控 制系统 方 案.
收 稿 日期 :2 0 1 4— 1 0—1 9
作者简介 :肖茵茵( 1 9 8 3 一 ) ,女 ,博士 ,讲师 .主要研究方 向:自动化仿真 、信息安全 、互联网技术等.
车速控制系统程序及仿真课程设计说明书
2024-01-25
• 课程设计背景与目的 • 车速控制系统原理及组成 • 程序设计思路与实现 • 仿真模型建立与验证 • 硬件在环测试方案设计与实施 • 课程设计总结与展望
01
课程设计背景与目的
背景介绍
交通安全问题日益严重
随着汽车数量的不断增加,交通事故频发,其中超速行驶是主要原 因之一。
05
硬件在环测试方案设计与实施
硬件在环测试原理介绍
硬件在环测试(HIL)是一种通过将 被测控制器与虚拟环境相连接,以实 现对控制器性能进行测试的方法。
在车速控制系统中,硬件在环测试通 过模拟车辆行驶过程中的各种工况, 对控制器的控制策略进行验证和评估 。
硬件在环测试系统由实时仿真模型、 接口电路、被测控制器和上位机等组 成,其中实时仿真模型用于模拟车辆 动态响应,接口电路用于实现信号转 换和传输,被测控制器为待测试的车 速控制器,上位机用于监控和记录测 试过程。
针对车速控制系统的各项功能 需求和性能指标,设计相应的 测试用例,包括正常情况下的 车速控制、异常情况下的车速 控制、车速控制的响应时间和 精度等。
按照测试用例和测试流程,对 被测控制器进行硬件在环测试 ,记录测试过程中的各项数据 。
测试结果分析
数据处理
对测试过程中记录的数据进行整理和分析,提取关键指标 和特征参数。
针对车速控制系统的特点,设计了合适的控 制算法,并通过仿真实验验证了算法的有效 性和优越性。
存在问题及改进方向
传感器精度问题
当前车速传感器存在一定的 测量误差,后续可以考虑采 用更高精度的传感器以提高
车速控制的准确性。
控制算法鲁棒性
当前控制算法在应对复杂路 况和突发情况时表现不够稳 定,未来可以研究更加鲁棒 的控制算法以提高系统的适
车辆自适应巡航控制系统(ACC)设计

车辆自适应巡航控制系统(ACC)设计与分析65090617付裕一、引言ACC系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。
在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。
当与前面的车之间的距离过小时(这可以在车内设定距离),ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。
本文将通过连续系统设计与分析的知识对ACC系统进行分析。
二、研究对象工作过程和要求描述1.控制原理:电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。
2.系统框图如下:三、被控对象的数学模型建立m ——汽车质量g ——重力加速度f ——滚动阻力系数C ——空气阻力系数A ——等效迎风面积r ——轮胎半径gi ——变速器速比di ——主减速器速比η——传动效率当获取了自适应巡航状态下的速度控制目标ad后,整车期望转矩四、控制系统的控制器模型设计经查询资料可知发动机工作模式下的传递函数如下综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,ACC系统的传递函数如下五、 MATLAB仿真结果单位阶跃响应:伯德图根轨迹图六、控制系统性能分析1、 稳态性能分析1) 稳态误差分析位置误差系数:2.143)(lim 0==→s G K s p 故稳态误差为:007.01==pss K e ,故此系统具有良好稳态性能。
2) 根轨迹分析 由开环传递函数可知被控对象极点为:150,10,10321-=-=-=P P P ,零点为无穷远处。
汽车定速巡航控制系统模拟设计讲解

《汽车电子》课程设计说明书设计题目:汽车定速巡航控制系统模拟设计学院名称:专业:姓名:学号:指导老师:2013年12月目录第1章课题分析 (2)第2章模拟方案设计 (4)第3章系统硬件设计 (4)3.1 系统总体电路图 (5)3.2主要元器件简介 (5)3.2.1 AT89C51芯片简介 (5)3.2.2 ADC0808芯片简介 (7)第4章系统软件设计 (9)4.1 主程序流图 (9)4.2汇编程序源代码 (10)第5章系统仿真结果 (12)参考文献 (15)课程设计小结 (16)第1章课题分析定速巡航系统(CRUISE CONTROL SYSTEM) 缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。
其作用是:按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。
采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
其中现在比较普遍的有两种控制方式,一种是最新电子式,一种是机械控制式。
较我们的课题而言,最新电子式的工作原理及其控制系统是我们需要研究的。
工作过程:最新电子油门定速巡航的工作过程更加智能化和精确化,是通过定速巡航系统控制电子油门传感器输出的信号,控制节气门开启大小的调整,来实现对车辆速度的控制。
定速巡航功能开启后,定速巡航模块会通过电子油门传感器输出的信号,精确计算为保持当前定速巡航速度,需要控制节气门开启的角度大小,从而使得气、油精确配合,来达到定速巡航所设定的行驶速度,完全摒弃了传统的机械部分控制,已达到控制更精准、安全的效果。
最新电子式定速巡航的各个功能的工作原理如下:(1)定速巡航功能:主要是通过巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,通过精准的电子计算发出指令,保证车辆在设定速度下的最精准供油量。
(2)电子节油功能:主要是通过智能优化控制节气门的开启角度与开启时间,有效屏蔽电子油门传感器由于颠簸路段及不良驾驶习惯形成的杂乱信号,经过精确计算喷油量,使燃油得到最充分燃烧,来实现节油。
毕设:汽车定速巡航系统设计(原创)
论文题目:汽车定速巡航系统设计指导教师:刘强⏹专业:测控技术与仪器⏹班级:测控0704⏹学生:王发科⏹学号:0703020401学位论文答辩背景:随着经济的高速发展,汽车工业和公路运输也得到了快速的发展,这使得车辆驾驶的自动化己成为汽车发展的主要趋势之一。
与此同时,人们需要更加舒适、简便和安全的交通工具,以适应快速的生活节奏,因此对汽车智能化的要求更加迫切。
在长途驾驶中,我们不仅要控制车辆的方向,车辆的油门踏板也需要在我们的实时控制之下,这种“变化”的控制,不仅影响发动机的动力性和驾驶的舒适性,更是增加了驾驶的强度,给我们的生产生活带来了很大的安全隐患。
因此我们就需要一种驾驶辅助系统,来改善这些不利因素。
学位论文答辩意义汽车定速巡航控制系统(CCS)就是可使汽车工作在发动机稳定且有利转速范围内,减轻了驾驶员的操纵强度,提高行驶舒适性和安全性,在很大程度上降低或避免了交通事故的发生。
它的安装能使汽车的动力性、操作稳定性、安全性、燃油经济性及尾气的排放量都得到了大幅改善。
能给我们的生产、生活带来极大的便利。
同时,随着我国高速公路网的迅速扩大和延伸,汽车巡航控制系统不仅能提高公路的利用率,而且它的其他优越性能也将更好的体现出来。
因此,这种汽车新技术在我国具备广泛的发展和应用前景,其研究的意义也是非常重大的。
研究现状汽车定速巡航控制系统是当汽车在高速公路上行驶时,驾驶员即使不踏油门踏板,汽车能根据驾驶员设定的目标车速自动调节油门开度,使车辆达到按目标车速自动行驶目的的装置。
国外研究巡航控制系统起步很早,其发展过程主要经历了三个阶段,分别是以模拟电路为基础的汽车巡航控制系统、以数字技术为基础的汽车巡航控制系统和以智能化为核心的汽车巡航控制系统。
由于国内汽车起步较晚,并且就目前我国公路状况和实际应用来说,对汽车巡航控制系统的研究应用主要是以单车定速控制为主。
目前,模拟汽车恒速控制器在我国已经投人生产和使用,主要是机电式巡航控制系统。
基于PID控制的汽车定速巡航系统设计与试验
基于PID控制的汽车定速巡航系统设计与试验汽车定速巡航系统是一种能够保持车辆在设定速度范围内自动保持稳定车速的系统。
PID(比例-积分-微分)控制是一种常用的控制算法,它可以根据当前系统的状态进行调整,并使系统保持稳定的状态。
本文将介绍基于PID控制的汽车定速巡航系统的设计和试验。
首先,我们需要实现测量和控制系统的硬件设计。
这包括车速传感器,用于测量当前车辆的速度,并将其作为反馈信号输入到控制系统中。
另外,还需要设计一个执行器,例如节气门执行器,控制汽车的加速和减速。
这些硬件组件需要与控制器进行连接,以便能够实现相应的控制操作。
其次,我们需要设计PID控制器。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分用于通过比例调整来纠正系统的误差,积分部分用于积累误差并适应系统的变化,微分部分用于预测系统未来的变化趋势。
PID控制器的设计需要根据实际系统的特性进行参数调整,以达到系统稳定控制的目标。
接下来,我们进行系统的试验。
首先,我们需要通过实验测量得到汽车的速度-时间曲线。
然后,将测得的速度作为反馈信号输入到PID控制器中,控制器将根据设定的目标车速和当前的反馈信号调整执行器的操作,以实现保持车速稳定的目标。
在试验中,我们可以通过车速表或者车载仪表板上的车速显示来观察系统的效果。
在试验过程中,我们还可以对PID控制器进行参数调整和优化。
通过调整PID控制器的比例、积分和微分参数,可以改变系统的响应速度和稳定性。
例如,增加比例参数可以提高系统的快速响应能力;增加积分参数可以降低系统对干扰的敏感性;增加微分参数可以改善系统的稳定性。
通过不断调整参数,我们可以找到最优的PID参数,以实现最佳的控制效果。
综上所述,基于PID控制的汽车定速巡航系统设计和试验包括了硬件设计、PID控制器设计和参数调整三个主要步骤。
通过合理设计和优化PID控制器,我们可以实现车辆稳定巡航的目标,提高驾驶的舒适性和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《汽车电子》课程设计说明书设计题目:汽车定速巡航控制系统模拟设计学院名称:专业:姓名:学号:指导老师:2013年12月目录第1章课题分析 (2)第2章模拟方案设计 (4)第3章系统硬件设计 (4)3.1 系统总体电路图 (5)3.2主要元器件简介 (5)3.2.1 AT89C51芯片简介 (5)3.2.2 ADC0808芯片简介 (7)第4章系统软件设计 (9)4.1 主程序流图 (9)4.2汇编程序源代码 (10)第5章系统仿真结果 (12)参考文献 (15)课程设计小结 (16)第1章课题分析定速巡航系统(CRUISE CONTROL SYSTEM) 缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。
其作用是:按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。
采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
其中现在比较普遍的有两种控制方式,一种是最新电子式,一种是机械控制式。
较我们的课题而言,最新电子式的工作原理及其控制系统是我们需要研究的。
工作过程:最新电子油门定速巡航的工作过程更加智能化和精确化,是通过定速巡航系统控制电子油门传感器输出的信号,控制节气门开启大小的调整,来实现对车辆速度的控制。
定速巡航功能开启后,定速巡航模块会通过电子油门传感器输出的信号,精确计算为保持当前定速巡航速度,需要控制节气门开启的角度大小,从而使得气、油精确配合,来达到定速巡航所设定的行驶速度,完全摒弃了传统的机械部分控制,已达到控制更精准、安全的效果。
最新电子式定速巡航的各个功能的工作原理如下:(1)定速巡航功能:主要是通过巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,通过精准的电子计算发出指令,保证车辆在设定速度下的最精准供油量。
(2)电子节油功能:主要是通过智能优化控制节气门的开启角度与开启时间,有效屏蔽电子油门传感器由于颠簸路段及不良驾驶习惯形成的杂乱信号,经过精确计算喷油量,使燃油得到最充分燃烧,来实现节油。
(3)油门加速功能:主要是通过提高节气门响应灵敏度实现的,当系统发现司机有加速意愿时,会驱动节气门尽可能快的打开,这样就使油门响应的敏感度得到了提高。
在油门踏板被踩下时,控制器会根据踩下幅度、时间计算油门信号的变化率,变化越快,说明加速要求越强烈,最终实现油门响应速度更快,整车的动力感会明显增加,能够让司机感觉到整车动力大大提升。
(4)限速设定功能:通过控制器,根据限定的速度值,设定输出油门信号最大值,当油门输出信号超不过设定的最大值,来实现限制速度的目的。
(5)刹车故障报警功能:通过采取刹车电路的信号,当刹车电路或刹车保险故障时,会通过告警的方式对司机进行提示。
在现在的中高档的轿车中都应用到定速巡航系统。
我们本次的课程设计所做的汽车定速巡航控制系统模拟设计将对其中的原理和控制有更加清楚的认识,对我们将来从事汽车电子方面的工作有着更大的帮助。
第2章模拟方案设计定速巡航主要应用在车速比较高的而且是长时间保持高速行驶状态下,因此在实际的汽车运行中,由于高速的危险性是巨大的,所以定速巡航控制系统要非常准确且精密,稍有疏忽,将会带来致命性的后果,因此使得定速巡航控制系统模拟设计比较复杂,在仿真实验中可以用proteus软件中的电位器模拟节气门开度,节气门的开度变化对应着电位器电压值的变化。
在本课程设计中可以将控制系统简化为电位器的电压随着节气门开度的变化,并通过点亮和熄灭不同的二极管以及启动和关闭蜂鸣器来显示车速的定速值。
节气门开度的大小决定了车速的变化,在实际车辆行驶中,定速巡航的判断依据是车速和启用定速巡航控制开关,当车正常行驶时,P1.4开关闭合,其中的LED灯亮;当按下其他开关时,由于其他的开关的优先级都高于P1.4,所以其他开关工作时,LED灯灭,此时显示屏显示按下开关对应的数值,汽车按开关设定的数值进行行驶。
第3章系统硬件设计2.1 系统总体电路图定速巡航控制系统模拟设计系统总体电路图中主要由AT89C51单片机、发光二极管,LED显示器等组成,其具体连接电路如图1所示:图1 定速巡航控制系统总体电路图2.2主要元器件简介1. AT89C51单片机 1个2. PCB 板 1 块3. 发光二极管 1 个4. 30P电容 3只5. 12MHZ晶振 1 个6. 导线若干7. 二极管 5个8. 10k电阻 8个9. 1k 电阻 5个9. 电容 1个10. 10U/25V电容 1只11. 220欧姆电阻 1只12. 4位LED显示器 1个2.2.1 AT89C51芯片简介AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmableand Erasable Read Only Memory)的低电压,高性能CMOS8位微处理器,俗称单片机。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
VCC:供电电压。
GND:接地。
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。
在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于部上拉的缘故。
在FLASH编程和校验时,P1口作为第八位地址接收。
P2口:P2口为一个部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL 门电流,当P2口被写“1”时,其管脚被部上拉电阻拉高,且作为输入。
并因此作为输入时,P2口的管脚被外部拉低,将输出电流。
这是由于部上拉的缘故。
P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。
在给出地址“1”时,它利用部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的容。
P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带部上拉电阻的双向I/O口,可接收输出4个TTL门电流。
当P3口写入“1”后,它们被部上拉为高电平,并用作输入。
作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
RST:复位输入信号输入端,高电平有效。
当振荡器工作时,在此引脚上出现两个机器周期以上的高电平,就可以使单片机复位。
ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的地位字节。
在FLASH编程期间,此引脚用于输入编程脉冲。
在平时,ALE端以不变的频率周期输出正脉冲信号,此频率为振荡器频率的1/6。
因此它可用作对外部输出的脉冲或用于定时目的。
然而要注意的是:每当用作外部数据存储器时,将跳过一个ALE脉冲。
如想禁止ALE的输出可在SFR8EH地址上置0。
此时, ALE只有在执行MOVX,MOVC指令是ALE才起作用。
另外,该引脚被略微拉高。
如果微处理器在外部执行状态ALE禁止,置位无效。
PSEN:外部程序存储器的选通信号。
在由外部程序存储器取指期间,每个机器周期两次/PSEN有效。
但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。
EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有部程序存储器。
注意加密方式1时,/EA将部锁定为RESET;当/EA端保持高电平时,此间部程序存储器。
在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
XTAL1:反向振荡放大器的输入及部时钟工作电路的输入。
XTAL2:来自反向振荡器的输出。
振荡器特性:XTAL1和XTAL2分别为反向放大器的输入和输出。
该反向放大器可以配置为片振荡器。
石晶振荡和瓷振荡均可采用。
如采用外部时钟源驱动器件,XTAL2应不接。
有余输入至部时钟信号要通过一个二分频触发器,因此对外部时钟信号的脉宽无任何要求,但必须保证脉冲的高低电平要求的宽度。
芯片擦除:整个PEROM阵列和三个锁定位的电擦除可通过正确的控制信号组合,并保持ALE管脚处于低电平10ms 来完成。
在芯片擦操作中,代码阵列全被写“1”且在任何非空存储字节被重复编程以前,该操作必须被执行。
此外,AT89C51设有稳态逻辑,可以在低到零频率的条件下静态逻辑,支持两种软件可选的掉电模式。
在闲置模式下,CPU停止工作。
但RAM,定时器,计数器,串口和中断系统仍在工作。
在掉电模式下,保存RAM的容并且冻结振荡器,禁止所用其他芯片功能,直到下一个硬件复位为止。
第4章系统软件设计4.1 主程序流程图定速巡航控制系统流程图如图2所示:图2 定速巡航控制系统流程图4.2汇编程序源代码ORG 00HSJMP LORG 0003HLJMP KORG 30HL:MOV P1, #00HMOV P0 , #00HSETB EASETB EX0SETB P3.0 SJMP LK:JB P1.0, X1 JB P1.1, X2 JB P1.2, X8 JB P1.3, X9 SJMP X5X5:LJMP X10 CX: RETIX1:SETB P3.0 MOV P0, #3FH SETB P2.1 SETB P2.2 CLR P2.3 LCALL DELAY MOV P0, #6FH SETB P2.3 CLR P2.2 LCALL DELAY SJMP CXX2:SETB P3.0 MOV P0,#3FH SETB P2.1 SETB P2.2 CLR P2.3 LCALL DELAY MOV P0, #3FH SETB P2.3 SETB P2.1 CLR P2.2 LCALL DELAY MOV P0, #06H SETB P2.3 SETB P2.2 CLR P2.1 LCALL DELAY SJMP CXX8: SETB P3.0 MOV P0, #3FH SETB P2.1 SETB P2.2 CLR P2.3 LCALL DELAYMOV P0, #06HSETB P2.3SETB P2.1CLR P2.2LCALL DELAYMOV P0, #06HSETB P2.3SETB P2.2CLR P2.1LCALL DELAYSJMP CXX9: SETB P3.0MOV P0, #3FHSETB P2.1SETB P2.2CLR P2.3LCALL DELAYMOV P0, #5BHSETB P2.3SETB P2.1CLR P2.2LCALL DELAYMOV P0, #06HSETB P2.3SETB P2.2CLR P2.1LCALL DELAYLJMP CXX10: CLR P3.0LCALL DELAYLJMP CXDELAY:MOV R6,#250DL1:MOV R7, #100DL2:DJNZ R7, DL2DL3:DJNZ R6, DL1RETEND第5章系统仿真结果定速巡航控制系统模拟设计结果如下图3-图7所示:图3 定速巡航速度正常行驶(LED亮)图4 定速巡航速度在设置90km/h的仿真结果(P1.0闭合)图5 定速巡航速度在1000km/h的仿真结果(P1.1闭合)图6 定速巡航速度为110km/h的仿真结果(P1.闭合)图7 定速巡航速度在120km/h的仿真结果(P1.3闭合)参考文献1.单片微型机原理、应用与实验[M] , 友德志亮涂时亮编复旦大学2.单片机实用教程[M] , 勋源编著新民主审航空航天大学3.单片微型计算机原理与应用[M], 胡乾斌光斌玲甘锡英华中理工大学庆阳等.4.单片微型实践及应用[M],清华大学 20015.蔡振江.单片机原理及应用.电子工业,2008.56.可编程控制器应用技术与设计实例[M],人民邮电7.周润景,袁伟亭,景晓松.PROTEUS 在MCS-51&ARM7系统中的应用百例.电子工业,2006.108.baike.baidu./link?url=llyOa9gIQqc_IEgGTvMJy4bs6qzSn6bBgXpT1G2FdLtJ33YBK_zAttcTGQ6cDf59课程设计小结课程设计是一项重要的实践环节,是我们在校期间必须接受的一项工程训练。