第1章 雷达标绘基础知识汇总
雷达标绘

精心整理幻灯片1雷达标绘●雷达标绘与作图的用途●通过雷达标绘与作图,可以充分发挥雷达在避碰中的作用,确保船舶在能见度不良时的安全航行。
在避碰中雷达标绘与作图有如下作用:●能获得碰撞危险的早期警报;●能准确获得两船的最近会遇距离和会遇时间;●可精确求得来船的航向和航速;●可求出本船有效的避让措施;可判断来船的行动及双方避让行动是否有效。
幻灯片2碰撞案例分析幻灯片3碰撞案例分析●碰撞危险判断:SHAPE\*MERGEFORMAT幻灯片8舰操绘算图●使用舰操绘算图作相对运动图,具有标绘迅速、方便等优点。
图上印有等距离圈、方位圈、比例尺及对数比例尺等,可以直接使用。
幻灯片9一、求来船的运动要素(航向与航速)●作出本船航向线。
●根据两次观测得来的来船的方位和距离,在舰操绘算图上标出第一次的A点和第二次的C点,连接AC并延长。
如果两次观测的时间间隔为t,则相对运动速度,相对运动方向为矢量。
●●根据我船的航向和航速,过A点作我船航向的反航向线,截取(V0为我船的航速),连接BC,则矢量即为来船的航向和航速。
BC的长度为来船在时间间隔t内的航程,来船航速为。
将矢量平移至原点O,在方位圈上读取的度数即为来船的航向。
幻灯片10一、求来船的运动要素(航向与航速)●例题1:设本船真航向010°,航速12节,雷达观测来船回波资料如下:●1030真方位050°,距离8.′0海里●1040真方位049°,距离6.′5海里●求来船的航向和航速。
●解:(参见图9—3)●作出本船航向线。
●在舰操图上分别标出A点(050°,8.′0)和C点(049°,6.′5),连接A点和C点得相对运动线AC。
●过A点作本船航向的反航向线AB,AB等于我船在时间t(t=1min)内的航程,即海里。
●●连接BC,量得BC=1.4海里,则来船航速节;将BC平移至原点O,得来船航向为321°。
幻灯片11一、求来船的运动要素(航向与航速)幻灯片12二、求最近会遇距离与会遇时间(DCPA和TCPA)●由图9—2可知,是相对运动线,即●它是判断会遇最近距离及到达会遇最近的时间的重要依据。
雷达原理与系统知识要点总结(必修)
雷达原理与系统(必修)知识要点整理第一章:1、雷达基本工作原理框图认知。
2、雷达面临的四大威胁3、距离和延时对应关系4、速度与多普勒关系(径向速度与线速度)5、距离分辨力,角分辨力6、基本雷达方程(物理过程,各参数意义,相互关系,基本推导)7、雷达的基本组成(几个主要部分),及各部分作用第二章雷达发射机1、单级振荡与主振放大式发射机区别2、基本任务和组成框图3、峰值功率、平均功率,工作比(占空比),脉宽、PRI(Tr),PRF(fr)的关系。
第三章接收机1、超外差技术和超外差接收机基本结构(关键在混频)2、灵敏度的定义,识别系数定义3、接收机动态范围的定义4、额定噪声功率N=KTB N、噪声系数计算及其物理意义5、级联电路的噪声系数计算6、习题7、AGC,AFC,STC的含意和作用第四章显示器1、雷达显示器类型及其坐标含义;2、A型、B型、P型、J型第五章作用距离1、雷达作用距离方程,多种形式,各参数意义,PX=?Rmax=?(灵敏度表示的、检测因子表示的等)2、增益G和雷达截面A的关系2、雷达目标截面积定义3、习题4、最小可检测信噪比、检测因子表示的距离方程5、奈曼皮尔逊准则的定义6、虚警概率、检测概率、信噪比三者关系,习题.(会看图查数)由概率分布函数、门限积分区间表示的各种概率形式;7、为什么要积累,相参积累与非相参积累对信噪比改善如何,相参M~M倍。
8、积累对作用距离的改善,(方程、结论、习题)9、大气折射原因、直视距离计算(注意单位Km还是m)10、二次雷达方程、习题。
11、分贝表示的雷达方程,计算、习题,普通雷达方程的计算。
第六章距离测量1、R,tr,距离分辨力、脉宽、带宽关系2、最短作用距离、最大不模糊距离与脉宽、重频关系3、双重频判距离模糊、习题。
4、调频连续波测距原理,(距离到频率的转换,简单推导),测速。
5、相位差与距离的关系6、习题第七章测角1、相位测角原理(路程差与相位差的相互补偿)2、三天线测角原理、习题。
自动雷达标绘仪(ARPA)
1
②组合式
设备少、 价格低
精度高、 画面清晰 直观方便
2
按 显 示 目 标 动 态 方 式 不同分
①矢量型
②图示型 目 标 动 态 用 ( PAD 型 ) PAD显示 ①径向园 扫描 ②电视光 栅光标
3
按 扫 描 方式分
复习思考题:
1、普通船用雷达用于船舶避碰时有哪些局限性?
2、如何利用人工标绘求相遇船的碰撞参数? 3、画出ARPA系统的简框并简要说明其工作概况。 4、ARPA有哪些输入输出信息?
《航海雷达与ARPA〉第二篇
Ch1 绪论
2-1 各种传感信号的预处理
一、预处理的内容、必要性
1、必要性
5种传感器信号——模拟 → 数字 雷达回波处理:杂波抑制、检测判断等。 原始视频雷达信号的杂波处理及方位、距离信号 的量化处理; 陀螺罗经航向信号和计程仪航速信号的量化处理。
2、内容
《航海雷达与ARPA〉第二篇
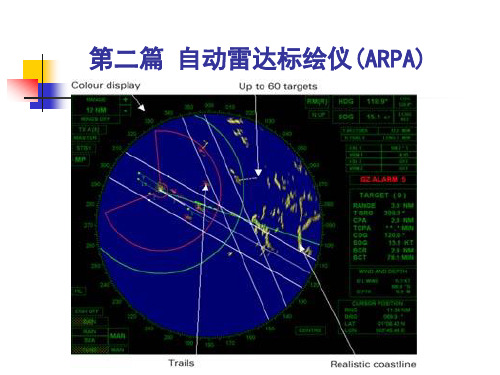
CPA C
DCPA
O (本船)
图2-1-1人工标绘图
SHM
VR
B 两船保速保向时预计的视运动
A(目标)
V0
D
VT
CPA C
DCPA
O (本船)
图2-1-1人工标绘图
人工标绘进行避碰的步骤
1、选择要进行标绘的相遇船回波(A)
2、监视该目标回波的移动
3、隔一定时间间隔(6min)标出B点
360 0
0.088 0 212
《航海雷达与ARPA〉第二篇
Ch2 ARPA基本原理
如采用专用同步机加A/D转换器
模拟信号输入
数字信号输出
第1章 雷达技术基础

G
4 Ar
2
32000 Bq Bj
– 目标雷达截面积 • 点目标、大目标、分别目标
• 目标(后向)散射功率 / 照射目标的功率密度
• 波长、视角、极化、目标特性的复杂函数
第1章 雷达技术基础
10
雷达方程与雷达系统设计
1.0 瑞利区 振荡区 光学区
r 2
球
0.1
0.01
0.001 0.1
– 目标:待测目标的电磁波反射或散射,如飞机、 云雨、天体、舰船、山川、森林、陆地、建筑 物、车辆、兵器、人员等 – 杂波:不需要的电磁波反射,如地面、海面、 植被、山区、建筑物等
– 干扰:有源干扰、无源干扰 – 噪声:环境噪声、系统热噪声
第1章 雷达技术基础
1.1 雷达的概念
• 雷达坐标系
– 极坐标系:斜距、方位角、俯仰角,常用
雷达方程与雷达系统设计
10-14 10-12 10-10 10-8 10-6 10-5 10-4 10-3
检测因子 Do / dB
10
5 10-2 0 10-1 -5
非起伏目标单 个脉冲线性检 波时检测概率 和所需信噪比 (检测因子)的 关系曲线
-10
-15 0.001
0.01
0.1
0.5 检测概率 Pd
– Merrill I. Skolnik,《Radar Handbook》 – 丁鹭飞、耿富录,《雷达原理(第三版)》, 西安电子科技大学出版社
– 中航雷达与电子设备研究院,《雷达系统》, 国防工业出版社
第1章 雷达技术基础
1.1 雷达的概念
• 雷达的定义?
– 雷达 Radar
• Radio Detection and Ranging • 原意:无线电探测与测距,无线电定位 – 利用电磁波的二次辐射、转发或目标固有辐射 来探测目标,获取目标空间坐标、速度、特征 等信息的一种无线电技术,相应的设备称为雷 达站或雷达机,简称雷达
最新雷达原理复习总结培训资料

雷达原理复习要点第一章(重点)1、雷达的基本概念雷达概念(Radar):radar的音译,Radio Detection and Ranging 的缩写。
无线电探测和测距,无线电定位。
雷达的任务:利用目标对电磁波的反射来发现目标并对目标进行定位,是一种电磁波的传感器、探测工具,能主动、实时、远距离、全天候、全天时获取目标信息。
从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息?斜距R : 雷达到目标的直线距离OP方位α: 目标斜距R在水平面上的投影OB与某一起始方向(正北、正南或其它参考方向)在水平面上的夹角。
仰角β:斜距R与它在水平面上的投影OB在铅垂面上的夹角,有时也称为倾角或高低角。
2、目标距离的测量测量原理式中,R为目标到雷达的单程距离,为电磁波往返于目标与雷达之间的时间间隔,c为电磁波的传播速率(=3×108米/秒)距离测量分辨率两个目标在距离方向上的最小可区分距离最大不模糊距离3、目标角度的测量方位分辨率取决于哪些因素4、雷达的基本组成雷达由哪几个主要部分,各部分的功能是什么同步设备:雷达整机工作的频率和时间标准。
发射机:产生大功率射频脉冲。
收发转换开关: 收发共用一副天线必需,完成天线与发射机和接收机连通之间的切换。
天线:将发射信号向空间定向辐射,并接收目标回波。
接收机:把回波信号放大,检波后用于目标检测、显示或其它雷达信号处理。
显示器:显示目标回波,指示目标位置。
天线控制(伺服)装置:控制天线波束在空间扫描。
电源第二章1、雷达发射机的任务为雷达提供一个载波受到调制的大功率射频信号,经馈线和收发开关由天线辐射出去2、雷达发射机的主要质量指标工作频率或波段、输出功率、总效率、信号形式、信号稳定度3、雷达发射机的分类单级振荡式、主振放大式4、单级振荡式和主振放大式发射机产生信号的原理,以及各自的优缺点单级振荡式:脉冲调制器:在触发脉冲信号激励下产生脉宽为τ的脉冲信号。
雷达知识点总结

雷达知识点总结一、雷达的基本原理雷达是利用无线电波进行探测的设备,其工作原理基于无线电波的发射和接收。
雷达基本原理包括以下几个关键环节:1. 无线电波的发射雷达发射机产生高频的无线电波,并将这些无线电波转化为一束射向待测目标的电磁波。
雷达发射机工作时,关键是通过天线把电能转换成电磁波,并辐射出去。
2. 无线电波的传播和反射发射出的无线电波在空间中传播,当遇到目标时部分被目标表面反射回来,这些反射回来的波被雷达的接收天线接收到。
3. 无线电波的接收和处理接收天线捕捉到反射回来的波,雷达接收机将这些波进行放大、滤波、解调处理,提取出有用的信息。
4. 目标信息的测量和分析通过分析接收到的信号的时间延迟、频率变化等信息,雷达系统可以确定目标的距离、速度、方位角等参数。
5. 显示和报警最后,雷达系统将分析得到的目标信息显示在操作员的监视屏幕上,同时进行报警和跟踪。
以上就是雷达基本的工作原理,根据这些原理,雷达系统可以实现对目标的探测和识别。
二、雷达的工作方式雷达可以根据工作方式的不同分为主动雷达和被动雷达两种类型。
1. 主动雷达主动雷达是指雷达发射机和接收机分开的雷达系统,发射机发射的信号由发送天线发射出去,接收机则由接收天线接收目标反射回来的信号,该方式下,雷达系统不需要等待传感器的使用权就能发射信号和接收目标信息。
2. 被动雷达被动雷达是指发射机和接收机是同一部分,这种雷达系统利用目标本身辐射的电磁波进行探测,通常是利用目标自身的雷达反射特性进行探测。
雷达的工作方式直接影响着其使用场景、性能和应用对象。
三、雷达系统的组成雷达系统是由多个部分组成的,主要包括以下几个组成部分:1. 发射和接收天线:发射和接收天线是雷达系统的核心部件,用于发射和接收电磁波。
2. 雷达发射机:雷达发射机负责产生和放大载频的高频信号,并将其送到发射天线。
3. 雷达接收机:雷达接收机负责接收目标反射回来的信号,并进行放大、解调、滤波等处理。
雷达标绘

A1 × A2 × A3 ×
M
P
Y O
基本原理
• 注意事项:
– 为了保证在观测时间内的船舶运动是匀速直线 的,必须进行连续的观测,实际中通常等时间 间隔地观测若干个点(至少3个);
– 相对运动航程不仅表示他船相对位置及变化时 间历程,还可以表示相对运动矢量,二者是有 区别的。
基本原理
– 矢量三角形在作图平面的任意位置都是等价的
– 或用有向线段端点字母的粗斜体表示,如MA1 (通常用来表示我船的运动矢量)、MA3(通 常用来表示他船的运动矢量)、A1A3(通常用 来表示他船的相对运动矢量),此时端点字母 的顺序表示矢量的方向。
一般定义
• 绝对运动与相对运动
– 绝对运动是动点相对于定坐标系的运动; – 相对运动是动点相对于运动坐标系的运动; – 运动坐标系相对于定坐标系的运动称为牵连运
重要性
• 雷达标绘的意义不仅仅在于标绘本身,而 且在于它涉及船舶几何避碰原理的基础, 对于定量的研究和把握避碰问题具有重要 作用。
基础知识
• 雷达显示方式
– 首线
• 北向上 • 首向上 • 航向向上
– 中心运动
• 真运动 • 相对运动
一般定义
• 运动要素
– 航向(Course); – 航速(Speed); – 最近会遇距离(DCPA: Distance of Closest
2 3 5 6 10 20 30 40 60 100
12
9
6 Ti
me
3 in
Mi
0
2
4
6
8
10
12
14
16
18
0 20
nut s
Speed in Knots
雷达知识概括
第一章基本工作原课第一节测距测方位基本原理1.测距a)利用电磁波特性:1).直接传播(微波波段)2).匀速传播(同一媒质中)3).反射特性(在任何两种媒质的边界面)----图式(旧图式:变速运动怎样计算距离?匀速度怎样计算距离?匀速度计算距离需要怎样的物理性质保证?微波波段电磁波特性能够满足匀速度计算距离需要怎样的物理性质吗?b)计算公式:S = C( t2 - t1 ) / 2其中:S:目标和本船距离; t1 :发射时刻;t2 :接收时刻;C:电波速度;为300000公里/秒为准确测量( t2 - t1 ) ,发射信号包络为矩形脉冲。
----图式(旧图式:匀速度计算距离显然如上述。
2.测向天线为定向天线,只向一个方向发射,也只接收这个方向的目标回波,实现这个方向的测距。
随着天波的转动,实现不同方向的测距。
----图式(旧图式:尖锐辐射与很宽范围辐射是什么关系?同距离不同方向的目标不好识别。
雷达测量对象:从测距测方位原理我们可以得出下列二点结论:1、只能探测目标水面上部分的距离、方位及大致的形状。
----图式(旧图式:水下声波传播很远,电磁波和光波很快衰减2、只能显示物标当前的位置,不能显示物标的速度和加速度。
----图式(旧图式:按照雷达距离计算公式,我们不能知道多普勒频率不能测量速度。
再根据测向和雷达距离计算公式---》显示物标当前的位置显然。
电波反射特性-------只能知道大致的形状第二节基本组成及各部分作用----图式(旧图式:按照工作顺序讲,也就是----图式(旧图式1,----图式(旧图式2,----图式(旧图式3 ......下列为电路顺序1)触发电路:每隔一段时产生一个尖脉冲,同时送到发射机、接收机、显示器三部分,使它们同步工作。
(触发电路决定工作开始的时间)----图式(旧图式3.3:发射机什么时候产生大功率,微波?2)发射机:触发脉冲到来后,立刻产生一个大功率,微波波段,具有一定宽度的脉冲包络射频(雷达工作频率,微波波段)的信号。
《自动雷达标绘仪》复习题
《自动雷达标绘仪》复习题《arpa》复习题一.选择题1.第一章绪论1、在arpa中的一个主要参数tcpa用来表示:a、会遇距离b、会遇时间c、最小会遇距离d、最小会遇时间2、在arpa,本船与目标船之间碰撞危险的紧迫程度可用下列哪一种来表示。
a、cpab、tcpac、ppcd、pad3、arpa可提供的目标六个运动和避碰数据是:a、本船航向、航速、目标航向、航速、距离、方位b、本船航向、航速、目标航向、航速、cpa、tcpac、目标相对航向、航速、距离、方位、cpa、tcpad、目标真航向、真航速、距离、方位、cpa、tcpa4、习惯上,常将dcpa简称为cpa,它表示预测的目标到最接近本船的_______。
a、时间b、距离c、边线d、方向5、人工标绘的条件就是,在标绘期间:a、目标保速保向,本船保速b、目标保速保向,本船保向c、目标和本船都须要保速保向d、目标和本船都不须要保速保向6、若目标船的r.m.l通过本船的mincpa圈,则此目标为危险船,驾驶员应该_______。
a、立即下舵而令,展开施救b、马上展开先行操船,求出最佳施救方案,接着采取措施c、由于arpa存有误差,先行壮船又就是一种数学模拟所以不要坚信arpad、如果tcpa 大于mintcpa,则表明目标为非常危险船,应立即实行施救措施7、人工标绘中,设置cpa安全界限的依据是:a、当时的航行态势b、本船的吨位,速度机动性,装载等情况c、两船安全通过必须存有一定距离d、以上各项8、若人工绘不能满足一定条件,则原先作的图作废,这些条件是:a、本船保速保向b、目标保速保向c、同时满足用户上述a、b二条d、作图过程中上述a、b二条不必同时满足9、在转为频密的穴水道中航行,高文瑞用的表明模式就是:a、航向向上b、北向上c、船首向上d、随意10、采用雷达观测定位时最出色采用:a、对水真运动显示b、对地真运动显示c、船首向上相对运动显示d、北向上相对运动显示11、在使用雷达进行标绘时,应该选用:12.3.4.a、北向上相对运动显示方式b、船首向上相对运动显示方式c、航向向上相对运动显示方式d、对水真运动方式12、在下列几种arpa图像指向表明模式中,哪种观点不对?a、船首向上(headup)图像低落b、北向上(northup)图像平衡c、航向向上(courseup)图像平衡d、航向向上船首线始终指0度第二章arpa系统的组成及工作概况1、现在大多arpa都使用:a、实时显示b、非实时显示c、由操作者按须要挑选d、由用户在添置时选定2、arpa的ppi之所以能够同时实现高亮度表明是因为:a、加快径向扫描速率b、加快天线旋转速度c、采用非实时扫描方式d、提高了雷达的分辨力3、在arpa给出的下列绪数据中,操作者经常最关心的是:a、目标的距离、方位b、目标的航向、速度c、本船的航向、速度d、cpa、tcpa4、预置arpa输入的信号和数据应是:a、由操作者任意确定预置内容b、预置本船航向、航速及安全帕累托数据c、预置本船航向数据d、预置本船航速数据5、使用arpa功能前,操作者应做到:a、按正确步聚调整好雷达b、预置arpa所需的输出信号和数据c、选定arpa采用的量程d、上述各项都应当搞6、使用arpa功能时,对航速数据的要求是:a、因避碰应用领域就是主要的,故只要输出本船对水航速b、任何时候只需输出本船对地航速c、导航时输入对地航速,避碰时输入对水航速d、任意7、arpa对传感器完整信号展开预处理的目的就是:a、视频信号定量,遏制杂波b、罗经信号数字化c、计程仪信号数字化d、a+b+c8、用作arpa系统中输出USB的主要用途就是:a、压缩传感器信号的幅度b、使输入到arpa的各种传感器信号极性合适c、并使各传感器模拟信号变为计算机可以拒绝接受的数字信号d、并使各传感器模拟信号相匹配9、本船电罗经存有故障时,则:a、arpa不能启动b、radar不能使用2c、arpa和radar均可照常使用d、arpa的功能不执行10、本船计程仪有故障时,则:a、arpa照常可使用b、radar不能使用c、radar照常可使用,但arpa不能使用d、radar和arda都不能使用11、在arpa中,pad的含义就是在下列哪个条件下,两船可能将出现相撞的区域?a、目标船和本船均保向保速时b、目标船保向保速,本船保速时c、本船保向保速、目标船保速时d、目标船保向保速,本船保向时12、在arpa中,若海区有风流时输入对水速度,则其显示的真矢量代表:a、长度为对水真速度,方向为船首向b、长度为对地速度,方向为航迹向c、长度为对水真速度,方向为航迹向d、长度为对地真运动,方向为船首向13、雷达向arpa提供的基本信息是:a、脉冲完整视频信号,引爆脉冲、雷达天线角边线信号及船首线信号b、目标的边线信息,航向信息,速度信息c、目标的方位信息,目标距离信息,船首线信息d、引爆脉冲信息,天线边线信息,航程信息14、电罗经向arpa提供更多的基本信息就是:a、本船的航向信息b、目标的航向信息c、目标的相对方位信息d、目标的真方位信息15、计程仪向arpa提供的基本信息是:a、目标的航速信息b、本船的航速信息c、本船的相对航速信息d、目标的航程信息16、对输入arpa的原始视频信号预处理包括以下内容:a、遏制杂波和信号定量b、对完整信号展开压缩c、a+b对d、a+b错17、在arpa的ppi综合显示器上,每一被跟踪的目标将出现一根矢量,矢量的长度表示在设定的矢量时间内:a、目标的运动方向b、目标的运动距离c、目标的运动速度d、目标的运动数据18、被跟踪目标发生的矢量的终端则表示经过预设的x分钟后,目标将抵达的:a、方向b、距离c、时间d、边线19、当将模拟天线角位置信号变成数字信号时,若要求最低位代表0.088度,那么,需用多少位二进制数字:a、11十一位b、12十一位c、13十一位d、14十一位20、在狭水道中,本船和目标船机动频繁,这时:a、arpa不再表明ppc或padb、由于破坏了arpa对ppc、pad的计算准则,因而造成画面杂乱,报警频繁c、arpa 因ppc和pad失效而不能正常工作3d、arpa图像与在开阔海域时一样21、arpa的传感器包括:a、高质量船用雷达b、电罗径c、速度计程仪d、以上各项22、矢量型arpa与pad型arpa相比,有下列哪种特点:a、检测目标的精度较低b、表明画面较准确c、通过先行操船就可以求出安全航速和安全航向d、以上各项23、在arpa中,若海区存有风流时输出对地速度,则其表明的真矢量代表:a、长度为对水真速度方向为船首向b、长度为对地真速度,方向为航迹向c、长度为对水真速度,方向为航迹向d、长度为对地真速度,方向为船首向24、arpa用作导航系统时,本船适用于工作模式应属_______:a、真矢量b、相对矢量c、对水速度d、对地速度25、下列哪一种不是arpa所需的原始输入信号?a、视频脉冲b、罗经航向c、电子方位线d、天线角边线26、arpa在执行避碰功能时要输入________速度,导航功能输入____速度。
HotZ-雷达系统(第一章)波形模糊函数 ppt课件

1.1 常见雷达波形 1.2 雷达信号模糊函数
1
背景
发射机 收发开关
天线
目标
终端 显示
信号 处理
接收机
R
雷达依赖天线向空间辐射电磁波,并接收由目标散 射的电磁波,以确定目标的存在。
雷达发射的电磁波具有一定的形式:连续波或脉冲 串,单频的或调频、调幅或相位编码的
2
雷达波形要求
要实现目标的有效检测,雷达信号波形必须同时满 足以下条件:
待测目标尺寸
调制类型
动目标检测
极化方式
多目标检测
波形、环境匹配 (模糊函数) 雷达成像
8
长度参数 距离像 目标识别
常见雷达波形介绍
连续波(Continuous Wave,CW) 频率调制连续波(Frequncey Modulated CW,FMCW) 脉冲(Pulsed)
9
常见雷达波形介绍
CW Radar
-可有效测量固定目标距离 单基系统存在收发隔离问题,双基系统较好
11
常见雷达波形介绍
Pulsed Radar
发射机由发射脉冲开、关 当发射机关闭时,接收机打开 在脉冲间的距离门上感知目标
-可有效测量目标距离 单基地系统的发射机与接收机隔离不是问题 可以测量距离变化率
12
常见雷达波形介绍
足够的能量(看得见) 足够的目标分辨率(看得准) 对需要的回波有很好的选择、屏蔽能力
(选择、对抗能力) 选择的雷达波形要与雷达用途、目标类型、目标环 境“匹配”
3
基本概念
波是一种可在媒介或空间中传播的,连续或突发的 周期性扰动,其到达均值的位移是时间,或空间, 或两者的函数。 电磁波直观解释是发射到空中的能量,这种能量部 分以电场的形式存在,部分的以磁场的形式存在。 电磁波的基本特性有:速度、方向、极化、强度、 波长、频率和相位。 波形是波的周期变化量的瞬时值沿时间表示的图形
雷达复习

第一章1. 简述单个球形粒子对雷达波散射的分类.2. 何谓Rayleigh 散射?简述其散射能流密度的特点.定义:当雷达波长一定后,散射粒子的散射取决于粒子直径与入射波长之比,d<<λ称为瑞利散射;特征:散射能流密度正比于1/λ4,即雷达波长越短,散射越强。
雷达波一定时,在满足瑞利散射时,粒子半径越大,散射越强。
3. 简述Mie 散射理论的应用范围.1用瑞利散射公式计算会产生误差,随着α增大,瑞利散射公式就不适用;2)米氏建立了包括“大”、“小”球形粒子在内的普遍的球形粒子散射理论,并导出了散射函数的表示式; 3) “大球”时,必须用米散射公式去处理才比较符合实际。
4. 简述雷达截面的意义及其在瑞利散射下的表达式. 5. 写出雷达反射率的定义及其表达式. 雷达反射率:瑞利散射条件下的雷达反射率:6. 写出瑞利散射条件下的雷达反射率因子及其表达的物理意义. 的绝大部分。
第二章1. 何谓衰减因子?简述其物理意义。
(1)假设没有考虑大气、云、降水等衰减时的平均回波率为1,则考虑大气、云、降水等衰减时的平均回波率的数值大小称为衰减因子K ,K<1;(2)物理意义:平均回波功率为1时的衰减后平均回波功率。
2. 何谓衰减系数?简述其物理意义并说明与衰减因子的关系。
物理意义:由于衰减作用,单位接收功率在大气中往返单位距离时所衰减掉的能量。
衰减系数的量纲:1/长度物理意义:要决定衰减因子K ,先要决定衰减系数k L 。
k L 是大气、云、降水等不同因子造成的总衰减系数。
3. 简述衰减因子的分贝表示法。
5. 简述云对雷达电磁波衰减的主要特点。
①由液滴组成的云的衰减随波长增加而迅速减小;②液态云的衰减还随温度减小而增加;③对于10cm 波长的雷达波,云的衰减很小,可忽略;④冰云的衰减要比液态云的衰减小2~3个量级。
*6. 简述雨对雷达电磁波衰减的主要特点。
1)单位降水强度的衰减系数K ’值除了与温度有关,还与波长有关;2)除波长λ=3.2cm 外,每一相同波长处不同谱型的K ’值很接近,没有因滴谱形式不同而出现很大差异;3)雨的衰减系数ktr 一般和降水强度I 近于成正比关系;4)λ=10cm 时,雨的衰减小到可以忽略,但K ’值随波长变小而很快增大,因此毫米波雷达一般不能用来测雨,而只用于测云;5)由于雨滴谱分布和降水强度经常是随空间变化的,故在雷达波束所经过的路径上每一段的衰减情况往往不相同。
(整理)经典雷达资料-第1章 雷 达 概 论
第1章雷达概论Merrill I. Skolnik1.1 雷达描述雷达的基本概念相对简单,但在许多场合下它的实现并不容易。
它以辐射电磁能量并检测反射体(目标)反射的回波的方式工作。
回波信号的特性提供有关目标的信息。
通过测量辐射能量传播到目标并返回的时间可得到目标的距离。
目标的方位通过方向性天线(具有窄波束的天线)测量回波信号的到达角来确定。
如果是动目标,雷达能推导出目标的轨迹或航迹,并能预测它未来的位置。
动目标的多普勒效应使接收的回波信号产生频移,因而即使固定回波信号幅度比动目标回波信号幅度大多个数量级时,雷达也可根据频移将希望检测的动目标(如飞机)和不希望的固定目标(如地杂波和海杂波)区分开。
当雷达具有足够高的分辨力时,它能识别目标尺寸和形状的某些特性。
雷达可在距离上、角度上或这两方面都获得分辨力。
距离分辨力要求雷达具有大的带宽,角度分辨力要求大的电尺寸雷达天线。
在横向尺度上,雷达获得的分辨力通常不如其在距离上获得的分辨力高。
但是当目标的各个部分与雷达间存在相对运动时,可运用多普勒频率固有的分辨力来分辨目标的横向尺寸。
虽然人们通常认为SAR是通过在存储器中存储接收到的信号,从而产生大的“合成”天线,但是用于成像(如地形成像)的合成孔径雷达在横向尺度上获得的分辨力仍可解释为,是由于利用了多普勒频率分辨力的结果。
这两种观点(多普勒分辨力和合成天线)是等效的。
展望用于目标成像的ISAR所能得到的横向分辨力的途径,理所当然应该是多普勒频率分辨力。
雷达是一种有源装置,它有自己的发射机而不像大多数光学和红外传感器那样依赖于外界的辐射。
在任何气象条件下,雷达都能探测或远或近的小目标,并精确测量它们的距离,这是雷达和其他传感器相比具有的主要优势。
雷达原理已在几兆赫兹(高频或电磁频谱的高频端)到远在光谱区外(激光雷达)的频率范围内得到应用。
这范围内的频率比高达109:1。
在如此宽的频率范围内,为实现雷达功能而应用的具体技术差别巨大,但是基本原理是相同的。
雷达标绘

A2
A1
TB3
TC
D3
TB2 TB1
D2 D1 B
O
41
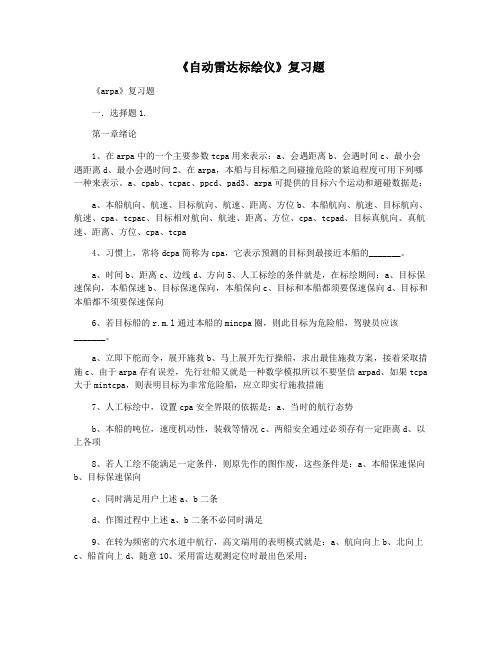
例题
2、某轮真航向040,航速10节,雷达测得来船 的真方位和距离如下:
时间 0800 0806 0812
真方位 050° 046° 040°
距离 8.0nm 6.5nm 5.0nm
求:1)来船的DCPA 、TCPA。 2)来船的航向、航速。 3)来船接近到3海里时的时间、方位。 4)来船过本船船首的时间、方位和距离。
2、北向上图象稳定相对运动模式
1) 应用
值班驾驶员在雷达观测和船舶定位时 经常使用。 (荧光屏上图象分布情况,同海图标识相 对应。)
12
雷达显示模式的选择
2) 特点 i)扫描中心在荧光屏上不动;船首线代表本船船 首方向;其他物标在荧光屏上对本船作相对运动。 ii)固定刻读圈的“0 °” 代表真北方向,固定刻 读圈读取的方位为真方位。 iii)本船转向时,船首线转动,物标回波保持稳定。
55
DCPA确定,求新航速
过船首位 置点
DCPA
H
P
O
A1
A2 A3 A4
A’1 B
航速降 为6kn
56
例题
7、某轮真航向010,航速12节,雷达测得来船 的真方位和距离如下:
时间 0800 0806 0812
真方位 050° 050° 050°
距离 10.0nm 8.5nm 7.0nm
如本船在0818时改变航速,使来船2.5海里通过。 求:1)来船的航向、航速。
13
雷达相对运动显示模式 3、航向向上图象稳定相对运动模式
1) 应用 值班驾驶员在避让、雷达观测和船舶定
(整理)经典雷达资料-第1章 雷 达 概 论
第1章雷达概论Merrill I. Skolnik1.1 雷达描述雷达的基本概念相对简单,但在许多场合下它的实现并不容易。
它以辐射电磁能量并检测反射体(目标)反射的回波的方式工作。
回波信号的特性提供有关目标的信息。
通过测量辐射能量传播到目标并返回的时间可得到目标的距离。
目标的方位通过方向性天线(具有窄波束的天线)测量回波信号的到达角来确定。
如果是动目标,雷达能推导出目标的轨迹或航迹,并能预测它未来的位置。
动目标的多普勒效应使接收的回波信号产生频移,因而即使固定回波信号幅度比动目标回波信号幅度大多个数量级时,雷达也可根据频移将希望检测的动目标(如飞机)和不希望的固定目标(如地杂波和海杂波)区分开。
当雷达具有足够高的分辨力时,它能识别目标尺寸和形状的某些特性。
雷达可在距离上、角度上或这两方面都获得分辨力。
距离分辨力要求雷达具有大的带宽,角度分辨力要求大的电尺寸雷达天线。
在横向尺度上,雷达获得的分辨力通常不如其在距离上获得的分辨力高。
但是当目标的各个部分与雷达间存在相对运动时,可运用多普勒频率固有的分辨力来分辨目标的横向尺寸。
虽然人们通常认为SAR是通过在存储器中存储接收到的信号,从而产生大的“合成”天线,但是用于成像(如地形成像)的合成孔径雷达在横向尺度上获得的分辨力仍可解释为,是由于利用了多普勒频率分辨力的结果。
这两种观点(多普勒分辨力和合成天线)是等效的。
展望用于目标成像的ISAR所能得到的横向分辨力的途径,理所当然应该是多普勒频率分辨力。
雷达是一种有源装置,它有自己的发射机而不像大多数光学和红外传感器那样依赖于外界的辐射。
在任何气象条件下,雷达都能探测或远或近的小目标,并精确测量它们的距离,这是雷达和其他传感器相比具有的主要优势。
雷达原理已在几兆赫兹(高频或电磁频谱的高频端)到远在光谱区外(激光雷达)的频率范围内得到应用。
这范围内的频率比高达109:1。
在如此宽的频率范围内,为实现雷达功能而应用的具体技术差别巨大,但是基本原理是相同的。
雷达标绘基础知识
常用术语及一般定义
4、反舷角 在他船观察到的本船的舷角, 在他船观察到的本船的舷角,同 样表示两船间的相对关系。 样表示两船间的相对关系。
船舶真运动与相对运动
绝对运动:动点相对于定坐标系的运动。 绝对运动:动点相对于定坐标系的运动。 相对运动:动点相对于运动坐标系的运动。 相对运动:动点相对于运动坐标系的运动。 绝对运动是客观存在的唯一的运动; 绝对运动是客观存在的唯一的运动; 相对运动是随选择坐标系的不同而不同。 相对运动是随选择坐标系的不同而不同。
船舶真运动与相对运动
V = Vr +V t 0
Vt
:他船的真运动矢量 Vr :他船相对本船的运动矢量 V0 :本船的真运动矢量
口诀: 口诀:自始返航向终连
雷达显示方式
按照雷达扫描中心在雷达荧光屏上的运动方式的不同, 按照雷达扫描中心在雷达荧光屏上的运动方式的不同, 可分为: 可分为: 一、相对运动显示方式 特点:扫描中心固定不动, 特点:扫描中心固定不动,回波按照其相对于本船的 相对运动显示。 相对运动显示。 二、真运动显示方式 特点:扫描中心在荧光屏上以本船真矢量运动。 特点:扫描中心在荧光屏上以本船真矢量运动。
雷达显示方式
一、相对运动显示方式 3、航向上相对运动显示方式 结合两者优点: 结合两者优点: 船首线指向上方,图像直观。 船首线指向上方,图像直观。 本船转向时物标回波稳定。 本船转向时物标回波稳定。
雷达显示方式
二、真运动显示方式 真运动也有船首向上、 真运动也有船首向上、北向上和航向向上三种 了解即可,不作本门课程重点! 了解即可,不作本门课程重点!
常用术语及一般定义
运动要素( 一 、运动要素(4个) 航向(Course) 航向(Course) 航速(Speed) 航速(Speed) 最近会遇距离(DCPA) 最近会遇距离(DCPA) 最近会遇时间(TCPA) 最近会遇时间(TCPA)
雷达原理复习总结资料讲解

4、自动距离跟踪
电移动指标自动地跟踪目标回波并连续地给出目 标距离数据。 整个自动测距系统应包括对目标的搜索, 捕获和自 动跟踪三个互相联系的部分。
为雷达提供一个载波受到调制的大功率射频信
为电磁波的传播速率(=3×108 米/秒)
距离测量分辨率
两个目标在距离方向上的最小可区分距离
号,经馈线和收发开关由天线辐射出去
2、雷达发射机的主要质量指标
工作频率或波段、输出功率、总效率、信号形
式、信号稳定度
收集于网络,如有侵权请联系管理员删除
3、雷达发射机的分类
高斯白噪声背景下,使输出信噪比达到最大化的 位两个坐标。采用平面上的亮点位置来表示目标
最优滤波器是匹配滤波器
4、自动增益控制方式
自动增益控制
跟踪雷达中获得归一化角误差信号。
的坐标,属于亮度调制显示器。
第五章(重点)
1、雷达方程 公式
瞬时自动增益控制
防止等幅波干扰、宽脉冲干扰和低频调幅波干扰
等引起的中频放大器过载。 近程增益控制 防止近程杂波干扰引起的中频放大器过载。
的中频信号再经中频放大器放大的,称为超外差 功率(Ni =kT0Bn); So 为输出额定信号功率; No 为
式。中频信号经检波后得到视频信号。
接收机主要组成部分
输出额定噪声功率。 噪声温度
收集于网络,如有侵权请联系管理员删除
NA=kTABn
3、匹配滤波
精品文档
平面显示器是二维显示器,显示目标的斜距和方
间不相干;
主振放大式:
高频部分
本振
接收机主要质量指标
灵敏度 Si min、接收机的工作频带宽度、动态范
雷达课件第1部分
C A’ B 岛屿 C’
本船
(a) 侧视图
A
外形轮廓
本船
(b ) 俯视图
岛屿
扫描 方向
扫描线 扫描原点 O (本船) 实际距离 探测距离 (c) 雷达图像 A
岛屿
C CRT边缘
• 2.径向扩展 • 发射脉冲宽度τ、接收机通频带宽度△f以
及荧光屏光点直径d会使物标回波在半径 方向上产生扩展。现以点物标为例进行 说明。 • 宽度为τ的发射脉冲打到点物标时,显然 ,回波的宽度也为τ。宽度为r的回波脉冲 通过接收机放大时,会使回波宽度失真 变形,增加约1/△f的宽度,这样,一 个点物标的回波宽度变成C(τ+1/△f)/2 。
两侧较暗。若扫描亮度、增益控钮稍些, 波的两侧边缘也会向中缩。 • 物标回波图像的横向缩小可提高雷达的 方位分辨率,但可能丢尖物标的真正边 缘.造成雷达测方位的误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船或目标对本船的相对运动。 ⅱ、动点(他船)对于动坐标(本船)的运动称为
相对运动。
第二节 船舶的真运动与相对运动
❖ 举例
①静止目标
ⅰ、运动方向 与本船航向相反。
ⅱ、速度
与本船船速相同。
②对驶的船舶
ⅰ、运动方向 与本船航向相反。
ⅱ、速度
第三节 运动模式的选择
② 特点 ⅰ、扫描中心在荧光屏上不动;船首线代表本船船
首方向;其他物标在荧光屏上对本船作相对运动。 ⅱ、固定刻读圈的“0 °” 代表真北方向,固定刻读
圈读取的方位为真方位。 ⅲ、本船转向时,船首线转动,物标回波保持稳定。
第三节 运动模式的选择
3、航向向上图象稳定相对运动模式 ①应用
首方向;其他物标在荧光屏上对本船作相对运动。 ⅱ、固定刻读圈的“0 °” 代表船首方向,读取的方
位为相对方位。 ⅲ、本船转向时,船首线指向固定刻度圈的“0 °” ,
周围物标以本船为中心向与本船转向的相反方向作 圆周运动。
第三节 运动模式的选择
2、北向上图象稳定相对运动模式 ①应用
值班驾驶员在雷达观测和船舶定位时经常使用。 (荧光屏上图象分布情况,同海图标识相对应。)
MANOEUVRES
SPEED ALTERATION
第四节 雷达标绘纸
二、雷达标绘纸使用与注意事项 要注意雷达观测的模式,是北向上还是航向向
上!
他船与本船反向
•O
第二节 船舶的真运动与相对运动
❖ 相对运动模式,求取他船的航向和航速
①根据力学中的相对运动原理可有公式
Vr + V。= Vt
其中:
Vr :相对速度
A3
V0 :本船真速度
Vt :他船的真速度
A1
Vt
V。
M
Vr
第二节 船舶的真运动与相对运动
②上等式两边同时乘以相同的时间可得
其中:
Sr + S0 = St
第一章 雷达标绘基础知识
第一节 常用术语及一般定义
一、运动要素 ❖航向(Course),航速(Speed),船舶运动状 态参数 ❖最近会遇距离(DCPA):衡量两船是否会导致碰 撞的标准 ❖达到最近会遇距离的时间(TCPA):是判断两船 潜在碰撞危险的程度大小,紧迫程度
第一节 常用术语及一般定义
234567891 0
OWN COURSE SPEED
SHIP
TARGET NO。 TIME
BEARING RANGE源自180SPEED IN KNOTS
OWN SHIP
DATE
TARGET NO。 CPA
TCPA
COURS E
SPEED ASPECT
OWN TIME
SHIP'S
COURSE ALTERATION
第三节 运动模式的选择
❖ 航海雷达运动模式的种类 1.相对运动模式 2.真运动模式
第三节 运动模式的选择
一、相对运动模式(包括三种运动模式) 1、船首向上图象不稳定相对运动模式 ①应用
值班驾驶员在船舶避让操纵中经常使用。 (荧光屏上图象分布情况,同了望情况完全相同)
第三节 运动模式的选择
② 特点 ⅰ、扫描中心在荧光屏上不动;船首线代表本船船
第三节 运动模式的选择
二、真运动模式 ❖ 主要特点
包括本船在内所有回波都在荧光屏上作真运 动。 ❖ 真运动模式应将本船的航向和航速输入。 ❖ 真运动模式在雷达标绘中不直观,所以使用较少。
第四节 雷达标绘纸 一、雷达标绘纸的主要内容
0
270
TIME IN MINUTES
90
198765432 0
两船船速之和。
第二节 船舶的真运动与相对运动
③相对运动轨迹平行于本船航向
ⅰ、相对运动轨迹的方向与本船航向同向(一种情
况)
TC
A2
A1
两船同向;比本船船 速快
•O
第二节 船舶的真运动与相对运动
ⅱ、相对运动轨迹的方向与本船航向反向(三种情
况)
TC
A1
B1
C1
A2
B2
两船同向; 比本船慢
静止 目标
C2
前言
1、参加海事局的考试(笔试部分) 2、参加上机评估(评估部分) 3、评估前完成作业(共计10分) (1)内容(共五道题,详见复印材料) (2)要求:做在雷达标绘纸上,并标明题号,答案
标清楚。
前言
4、上机时应带好作图工具 (1)实验指导书
每人一本,平时练习、评估考试用 (2)雷达运动图
每人四张,可到教材科购买。 (3)铅笔 (4)橡皮 (5)三角板 (6)分规
值班驾驶员在避让、雷达观测和船舶定位时经常 使用。(综合前两种显示的优点)
第三节 运动模式的选择
② 特点 ⅰ、船首线指向荧光屏的上方。 ⅱ、可直接读取真方位(利用电子方位圈)和相对
方位(固定刻度圈)。 ⅲ、本船转向时,船首线转动,物标回波保持稳定。
转向结束后,按“新航向向上”按钮,船首线和图 象快速并同步转动,使船首线指向荧光屏的上方。
二、运动矢量:有方向,有大小,矢量相加减是几
何关系
A1
Vt(他船真运动矢量)
Vr(他船相对运动矢量)
V0(本船真运动矢量) A3
Vt V。
Vr + V。= Vt
M
Vr
第一节 常用术语及一般定义
三、船舶间相对关系 1.船速比(K)及其意义 本船与来船船速比 K=1:两船船速相等 K>1:本船船速比他船船速大 K<1:本船船速比他船船速小 K>1 本船船速快,本船避让效果好。
Sr :相对航程 S0 :本船航程 St :他船航程
第二节 船舶的真运动与相对运动 作图方法
St
S0
Sr
第二节 船舶的真运动与相对运动 ③求取他船的航向和航速
(在相对运动模式的雷达标绘中)
已知:Sr 和 S。
求 :St *口决:自始反航向终连
第二节 船舶的真运动与相对运动
•A1
Sr
S0
A2
St
第一节 常用术语及一般定义
2.相对航向线弦角q
来船相对运动轨迹,称为相对航向线,也称相对
运动线
HL
B1 B2 B3
A1 A2 A3
qA
qB
第一节 常用术语及一般定义
3.相对航向线变化角α 相对航向线弦角的变化量,用来衡量避让效果。
HL A1
A2 A3 A5 A4 α
第一节 常用术语及一般定义 4.反弦角(Aspect) 在他船观察到本船的弦角,同样表示两船的关系。
Aspect
第二节 船舶的真运动与相对运动
一、真运动 ❖ 定义 ⅰ、以地球为定坐标系,船舶相对于地球的运动称
为真运动。 ⅱ、动点(他船)对于定坐标(地球)的运动称为
真运动。 ⅲ、动坐标(本船)对于定坐标(地球)的运动称
为牵连运动。 ❖举例 在空中看见他船的航向和航速。
第二节 船舶的真运动与相对运动