雷达两证培+人工标绘1
会遇态势相关的雷达标绘评估模型研究

既 满 足 《 9 2年 国 际 海 上 避 碰 规 则 , n e to n 17 Co v n in o
t nt r to a e he I e na i n lR gul ton o e e i a i s f r Pr v ntng Coli l—
E m al a yc a l 8 @ h t i c r . — i:c mb h n 91 o mal o . n
2
中 国 航 海
2 2年 第 2期 01
薛 满 福 的评 估模 型运 用 了隶 属 度 函数 , 结合 操 船 避 碰进 行评 分 。张 飞成 [ 运 用基 于数 理 统计 的评 估 7
a s s m e . A n e oun e iua i re e a r plt i s e s e t m o li v l pe . Fo o ln s e s nt nc t r st ton o int d r da o tng a s s m n de s de e o d r m dei g, t n— he e c nt r r lto e we n ow n s p a d t r e hi r l s iid The w egh san r isbl r or ore l t d ou e ea in b t e hi n a g ts ps a e c a s fe . i t d pe m s i e e r s f vaua e p r m e e s a e de i d ac or ng o t m p tnc e h ar m e e nd t oti e ii a a s r — a a t r r fne c di t he i ora e of ac p a t r a he pl tng pr c son ofr d r ob e va to . T he plt i ins o tng ope a i s s o e t m a ia l a e n t e be s p de r e T h sas e s ntm od lh s r ton i c r d au o tc ly b s d o he m m r hi g e . i s s me e a b e pp id i a rsm ult nd a h e d go e u t . e n a le n r da i a ora c ive od r s ls Ke r : s i n va ngiee i y wo ds h p, a le n rng; r da i ult r;r d oti a r sm a o a arpl tng;o r ton a s s m e t m e b r hi un ton pe a i s e s n ; m e s p f ci
“雷达操作与模拟器”专业培训改革建议

力弱等特点 , 同时也是为 了强调增强在职船员的 实际动手能力 , 故而许多实操项 目的培训时间相 对过长。经过前几年的履约培训 , 在职船员的“ 雷 达操作与模拟器” 培训已全部完成 , 而现在的培训
器.培训却安排在 A P 的 R A操作之前。 13 . 培训 内容有重复 的部分。如 在“ 船员 雷
高, 船员的综合素质也有 了很大 的变化。为此 , 在 培训中逐渐 感觉到原来 的“ 办法 ” “ 和 纲要” 与现 代航海技术 的发展 同步 尚有一定 的距离 , 在培训
掌握的时间较短 , 因而使得培训时间不能很好 的 利用 。 12培训 内容的先后 安排不合理。根据 “ . 纲 要” 有关雷达模拟器的培训, , 是放在“ 船员雷达观
分 , 现行 的“ 法 ” “ 而 办 和 纲要 ” 中未 包 含 电子 海 图
根 据多 年来 的 教 学 经 验 总 结 , 保 留原 发 证 在
规则 不 变 的前 提 下 , 对教 学 培 训 内容 ( 训 纲 要 ) 培
和教学 培训组 织 安排进 行 凋整 。 2 1对培 训 纲要 进行 讽整 .
达观测与标绘和雷达模拟器专业培训纲要” 第二
部分的第三、 六、 四、 七节 , 用了 l O小时进行 实操
练习, 却又在“ 船员雷达观测与标绘和雷达模拟器 专业培训纲要” 第三部分的第二节 , 用了 8 小时进
对象已全是在校的学生 , 他们 的文化水平、 英语水
平和接受能力较之 以前有很大 的提高 , 在实操项
关 键词 : 雷达操 作 与模拟 器” “ 专业培训 中图分 类号 : 6 6 U 7 1 改革 的原 因 培训 纲要 培 训计 划 文献标 识码 : A
《 中华人民共和国船员雷达操作与模拟器专
雷达操作与应用课程标准

《雷达操作与应用》课程标准课程代码:13013101课程类型:理实一体课课程性质:(必修课、限选课、任选课)适用专业:航海技术总学时:20一、课程性质与作用《雷达操作与应用》课程是航海类专业的专项训练课程,是根据STCW 公约马尼拉修正案《中华人民共和国海船船员适任评估规范》关于“雷达操作与应用”而设立的。
本课程的主要任务是培养学生掌握雷达操作方面的基本知识、雷达在船舶航行与避碰中的应用,使学生能够正确的使用雷达,判断局面从而实现避碰,使学生达到STCW公约马尼拉修正案和中华人民共和国海事局所规定的要求,能够满足船舶保安工作的需要。
二、课程目标通过本课程的学习,使学生或学员达到能通过海事局组织的培训合格证考试,取得适任评估证书。
(一)知识目标掌握雷达操作与应用的相关知识和技能;(二)能力目标1、能够正确使用雷达;2、能够雷达基本操作和设置、雷达定位、雷达导航、雷达人工标绘、雷达自动标绘、AIS报告目标及试操项目的学习,有助于船舶航行的安全。
(三)素质目标1、培养学生的动手操作能力;2、培养学生具备分析、判断和应变的能力;3、培养学生的自主学习和沟通能力。
三、课程设计理念与思路根据STCW公约马尼拉修正案及中华人民共和国海事局海船船员适任考试评估的有关要求,进行雷达基本操作和设置、雷达定位、雷达导航、雷达人工标绘、雷达自动标绘、AIS报告目标及试操项目的学习,通过评估,使学生或学员掌握雷达操作与应用的相关知识和技能并能正确进行操作和应用的能力。
四、教学进程安排学习项目学习任务课时1 雷达基本操作和设置任务一保持清晰观测目标的雷达操作方法1 任务二准确测量目标位置的操作方法2 雷达定位任务一雷达目标识别与定位目标的选择3 任务二雷达定位方法的选择任务三雷达定位目标测量方法与保证雷达定位的操作3 雷达导航任务一雷达平行线导航操作1 任务二雷达距离避险线导航操作任务三雷达方位避险线导航操作4 雷达人工标绘任务一转向避让措施6 任务二变速避让措施5 雷达自动标绘任务一目标捕获6 任务二目标跟踪6 AIS报告目标任务一AIS目标信息1 任务二雷达跟踪目标与AIS报告目标关联试操船任务一启动试操船的准备2 任务二试操船操作任务三获得有效的避碰方案任务四利用试操船确定恢复原航向和/或航速的时机总计20五、教学内容与要求项目名称雷达基本操作和设置课时 1教学目标知识目标掌握雷达各控钮的作用及操作要领能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达的正确使用学习任务任务一保持清晰观测目标的雷达操作方法任务二准确测量目标位置的操作方法相关知识雷达的基本组成及各部分功能教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达定位课时3教学目标知识目标掌握雷达定位的原理、定位误差等能力目标应用所学知识,能学以致用素质目标掌握不同的雷达定位方法学习任务任务一雷达目标识别与定位目标的选择任务二雷达定位方法的选择任务三雷达定位目标测量方法与保证雷达定位的操作相关知识距离方位定位基础知识教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达导航课时 1教学目标知识目标掌握导航线的应用能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达导航的正确使用学习任务任务一雷达平行线导航操作任务二雷达距离避险线导航操作任务三雷达方位避险线导航操作相关知识方位、距离避险线的使用教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达人工标绘课时 6教学目标知识目标通过人工标绘获取他船基本信息,从而判断会遇态势能力目标应用所学知识,能学以致用素质目标掌握各种会遇态势下人工标绘的方法学习任务任务一转向避让措施任务二变速避让措施相关知识矢量三角形的原理及应用教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达自动标绘课时 6教学目标知识目标能正确标绘物标并掌握各参数含义能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达自动标绘的正确使用学习任务任务一目标捕获任务二目标跟踪相关知识ARPA自动标绘相关知识教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称AIS报告目标课时1教学目标知识目标AIS基本信息的输入、获取等能力目标应用所学知识,能学以致用素质目标掌握各种型号AIS的正确使用学习任务任务一AIS目标信息任务二雷达跟踪目标与AIS报告目标关联相关知识AIS工作原理教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称试操船课时2教学目标知识目标试操船功能设置及避让措施能力目标应用所学知识,能学以致用素质目标掌握各种型号试操船的正确使用学习任务任务一启动试操船的准备任务二试操船操作任务三获得有效的避碰方案任务四利用试操船确定恢复原航向和/或航速的时机相关知识转向和(或)避让示意图教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问六、考核评价本课程的考核与海事局的考核直接接轨,实操考核满分100分,60分合格。
雷达操作与应用实训指导书
雷达操作与应用目录雷达操作与应用评估规范第一章雷达基本操作与设置第二章雷达观测、定位第三章雷达导航第四章雷达人工标绘第五章雷达自动标绘第六章 AIS报告目标第七章试操船雷达操作与应用评估规范(适用对象:9205、9206 500总吨及以上二/三副、9209未满500总吨二/三副)1.评估目的通过评估,在真实的雷达设备和/或雷达模拟器上,检验被评估者雷达观测、雷达导航和雷达避碰的设备操作和应用能力。
本评估满足STCW公约马尼拉修正案及中华人民共和国海事局海船船员适任考试评估的相关要求。
2.评估内容2.1 雷达基本操作与设置2.2 雷达观测2.3 雷达导航2.4 雷达人工标绘2.5 雷达自动标绘2.6 AIS报告目标2.7 试操船3.评估要素及标准(1)评估要素3.1 雷达基本操作与设置3.1.1 保持清晰观测目标的雷达操作方法①雷达开机前准备工作②雷达开机、核实传感器数据、并调整在最佳观测状态的操作③根据气象海况和航行环境保持清晰观测目标的操作④雷达关机操作3.1.2 准确测量目标位置的操作方法①准确测量目标距离的操作②准确测量目标方位的操作3.2 雷达定位①在评估要素3.1的基础上,雷达目标识别与定位目标的选择②雷达定位方法的选择③雷达定位目标测量方法与保证雷达定位精度的操作3.3 雷达导航①雷达平行线导航操作②雷达距离避险线导航操作③雷达方位避险线导航操作3.4 雷达人工标绘3.4.1转向避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定转向避让措施⑤根据转向不变线判断本船转向后来船的相对运动线的变化方向⑥通过标绘求出具体转向角并核查是否会导致另一紧迫局面⑦操纵船舶进行转向避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航向的时机并采取措施⑩分析产生误差的原因3.4.2变速避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定变速避让措施⑤判断本船变速后来船的相对运动线的变化方向⑥通过标绘求出变速幅度并核查是否会导致另一紧迫局面⑦操纵船舶进行变速避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.4.3停船避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定避让措施⑤判断本船停船后来船的相对运动线的变化方向⑥通过标绘求出停船时机(应考虑冲程的影响)并核查是否会导致另一紧迫局面⑦操纵船舶进行停船避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.5 雷达自动标绘3.5.1 目标捕获①CPA/TCPA设置准则②目标捕获的含义,建立初始跟踪的过程,目标运动趋势数据的获取③目标手动捕获和自动捕获在不同航行环境中使用的基本原则及其优势与局限性④自动捕获设置方法及抑制区的合理使用3.5.2 目标跟踪①目标稳定跟踪条件判断,目标预测运动数据的获取及其精度判断②在可能发生目标丢失和目标交换条件下的雷达观测与操作③判断目标危险的方法及其操作④本船机动和目标机动对雷达数据的影响3.6 AIS报告目标3.6.1 AIS目标信息①识别AIS休眠目标、激活目标、被选目标、危险目标、丢失目标和轮廓目标②获取AIS目标信息3.6.2 雷达跟踪目标与AIS报告目标融合①AIS辅助雷达避碰的操作②雷达跟踪目标与AIS报告目标融合条件的选择3.7 试操船①启动试操船的准备②雷达跟踪目标与AIS报告目标试操船方法及其操作③判断试操船结果的可行性④利用试操船确定恢复原航向和/或航速的时机(2)评估标准:①操作正确、熟练,回答问题完整准确:100%;②操作正确、比较熟练,回答问题基本准确:80%;③操作正确、熟练程度一般,回答问题尚准确:60%;④操作较差,回答问题错误较多:40%;⑤操作差,回答问题基本不正确:20%;⑥无法完成操作,不能回答出问题:0。
船舶驾驶员“雷达两证”培训中存在的问题与对策

作提供有力的保证 。
1 雷达 两证 培训 的基 本情 况 根据 S C 公 约 的要 求 , 事 局 制 定 了具 体 TW 海 的培 训 大纲 , 达 两 证 培训 的教 学 方 式 由理 论 教 雷
、 ● ●
好的船艺 , 确保航行安全。
雷达 观 测与 标 绘和 雷达模 拟器 教 学 时数 分配 序号 课 程名 称 理 论课 实操 课 理论 考 试 实操 考试 2 4
SC 89 T W7/ 5公 约 实施 几 年来 , 量 船 员 和 航 大
学 、 验 教学 和模 拟器 实 操 训 练组 成 , 中理 论 教 实 其 学时 数 4 8学 时 , 实践教 学 ( 实验 和模 拟器 教 学 ) 时 数6 6学 时 , 实 验教 学 和模 拟 器 教 学 中对 学员 进 在
2 合计
3 总计
1 2
3 6
2 4
8
8
收 稿 日期 :0 6— 3— 3 2 0 0 0
作者 简介 : 赵学军 (9 2一 ) 男. 17 . 讲师
・
1 ・ 0
维普资讯
20 年第 1 06 期
青 岛远 洋 船 员 学 院学 报
V L2 N . O .7 O 1
2 目前 雷达 两证 中存 在 的问题 2 1教材 内容滞 后 , . 理论 与 实践 脱节 教 材 内容 滞 后 , 雷 达 两 证 培 训 中 的一 个 非 是 常严 重 的 问题 。 目前在 雷 达 两 证 培训 中所 使 用 的 教材 , 内容 没 有 涉 及 现 在 船 上 所 使 用 的新 型 的现
也直接影响了雷达两证课的培训效果 。雷达作为
一
种 电子技术产品, 要掌握其工作原理 , 必须要有
海事局评估 二三副

• 成绩评定:
满分100分,60分及以上及格,但船舶操纵、避碰与驾驶台资 源管理三项各单项评估成绩均须达到及格分,否则视为不及格。
• 评估形式:以大型航海模拟器进行。 • 评估时间:不少于30分钟。
雷达操作与应用评估
项目
雷达基本操作与设臵 雷达定位
评估内容
保持清晰观测目标的雷达操作方法 准确测量目标位臵的操作方法
船舶操纵、避碰与驾驶台资源管理
• 评估标准:
①方法、操作或分析正确、熟练:100%; ②方法、操作或分析正确、比较熟练:80%; ③方法、操作或分析正确、熟练程度一般:60%; ④方法、操作或分析情况较差:40%; ⑤方法、操作或分析情况差:20%; ⑥无法完成0%,如果学员因操作不熟练不能及时完成任务或不 能安全完成任务,均视为实操失败。
航线设计
5
5
10
10
5 航次计划表 5 B. 沿海航区500 总吨及以上船舶二 /三副。
航行监控 (共25分) 基本监控 特殊情况应对 航行记录 航海日志 (共20分) 查看航行记录 输出航行记录
15 10 10 5 5 5
15 10 10 5 5 5
过分依赖电子海图的风险 过分依赖电子海图的风险
ECDIS评估内容
雷达自动标绘
AIS报告目标
AIS目标信息
60
雷达跟踪目标与AIS报告目标融合 C.试操船未满 500总吨船舶二/三副。
雷达操作与应用评估
1、试操船: 2 3 4 5 、雷达定位: 、雷达人工标绘: 、雷达自动标绘: 、 AIS目标:
• • • • • • • • • • • • • • • • • • • • • • CPA/TCPA设臵准则 观测并标绘目标船的相对运动线 在基本操作的基础上,雷达目标识别与定位目 识别 启动试操船的准备 AIS休眠目标、激活目标、被选目标、危 求取目标船的航向、航速、CPA及TCPA 目标捕获的含义,建立初始跟踪的过程,目标运动趋势数据的 获取 判断本船所处的局面 雷达跟踪目标与 AIS报告目标试操船方法及其 标的选择 险目标、丢失目标和轮廓目标 目标手动捕获和自动捕获在不同航行环境中使用的基本原则及 根据规则的规定拟定转向 /变速/停船的避让措施 操作 其优势与局限性 判断本船转向 /变速/停船后来船的相对运动线的变化方向 雷达定位方法的选择 获取 AIS目标信息 自动捕获设臵方法及抑制区的合理使用 判断试操船结果的可行性 通过标绘求出具体转向角/变速幅度并核查是否会导致另一紧 目标稳定跟踪条件判断,获取目标预测运动数据及其精度判断 迫局面 雷达定位目标测量方法与保证雷达定位精度的 AIS 辅助雷达避碰的操作 在可能发生目标丢失和目标交换条件下的雷达观测与操作 操纵船舶进行转向/变速/停船避让 利用试操船确定恢复原航向和 /或航速的时机 判断目标危险的方法及其操作 操作 核查转向避让效果并判断他船行动 雷达跟踪目标与AIS报告目标融合条件的选择 本船机动和目标机动对雷达数据的影响 求取恢复原航向/航速的时机并采取措施 • 分析产生误差的原因
中华人民共和国海事局关于海船船员培训考试和发证工作有关事项的通知
中华人民共和国海事局关于海船船员培训考试和发证工作有关事项的通知文章属性•【制定机关】中华人民共和国海事局•【公布日期】2013.04.26•【文号】海船员[2013]266号•【施行日期】2013.04.26•【效力等级】部门规范性文件•【时效性】现行有效•【主题分类】职业培训正文中华人民共和国海事局关于海船船员培训考试和发证工作有关事项的通知(海船员〔2013〕266号)各有关单位:为全面履行经修正的《1978年海员培训、发证和值班标准国际公约》(以下简称STCW公约马尼拉修正案),实现《中华人民共和国海船船员适任考试、评估和发证规则》(交通运输部2004年第6号令,以下简称“04规则”)向《中华人民共和国海船船员适任考试和发证规则》(交通运输部2011年第12号令,以下简称“11规则”)顺利过渡,以及“11规则”相关配套法规的有效实施,进一步做好海船船员培训、考试和发证管理工作,现将有关事项通知如下:一、“11规则”配套规定新增要求(一)为保证平稳过渡,在海船船员适任证书管理分工授权统一筹划调整之前,“04规则”中乙类船长和高级船员适任证书由具有无限航区证书签发权限的海事机构按规定进行管理。
乙类船长和高级船员适任证书管理机关发生变化,需要转移档案的,由直属海事机构双方本着高效便利的原则进行协商和移交。
(二)船员可在居住地、单位所在地、证书所在地参加过渡期适任培训和考核、合格证补差培训和考核。
航运公司、海员外派机构、船员服务机构可组织签订劳动合同或服务协议的船员在适当地点参加过渡期适任培训和考核、合格证补差培训和考核。
(三)船员在海船船员管理系统中的信息数据经过信息采集确认的,在申请船员业务时可免于提交系统中已有数据的相关材料。
(四)在2016年12月31日前年满65周岁的船员,免除过渡期适任培训和合格证补差培训要求。
(五)已按“11规则”完成职务晋升岗位适任培训的船员,无论职务晋升考试是否通过,均视为完成了过渡期适任培训并考核合格。
雷达操作与应用题卡
评估项目:雷达操作与应用适用对象:无限航区500总吨及以上二/三副编号:01~08评估时间:50分钟 评估方式: 实操+口述题 目:一、雷达基本操作和设置(真机,5min )(及格后方可进行后续评估)1、开机前准备;开机;核实数据并调整图像在最佳状态;关机。
2、测量目标的距离和方位二、雷达定位(15分)1、定位目标的选择和测量2、两物标距离定位,在海图上标出船位。
3、选择雷达定位物标的基本原则。
三、雷达导航(5分)雷达平行线导航操作四、雷达人工标绘(必过)(20分,15min )1、观测并标绘,求目标船的航向、航速、CPA 及TCPA 。
2、要求min CPA=2海里,求距目标船5海里时应采取的转向避让措施。
3、操纵船舶进行转向避让;核查避让效果,并求取恢复原航向的时机。
五、雷达自动标绘(45分)1、目标捕获(15分)数据的核实和输入;手动/2、目标跟踪(30分)1)跟踪数据的获取和解释;取消跟踪;目标丢失原因与确认2)矢量运用:(必过),相对矢量判断碰撞危险;真矢量判断会遇态势3)根据CPA/TCPA 判断危险;根据本船/目标数据判断会遇态势;PAD 的运用。
六、AIS 报告目标(10分)1)根据符号识别AIS 目标(休眠、激活、被选、危险、丢失);获取AIS 2)雷达跟踪目标与AIS 报告目标关联:设置;选择关联的优先权七、试操船(5分)试操船的操作;获取有效的避碰方案。
15min评估时间:50分钟 评估方式: 实操+口述题 目:一、雷达基本操作和设置(真机,5min ,及格后方可进行后续评估)1、开机前准备;开机;核实数据并调整图像在最佳状态;关机。
2、测量目标的距离和方位二、雷达定位(15分)1、定位目标的选择和测量2、单物标方位距离定位,在海图上标出船位。
3、选择雷达定位物标的基本原则。
三、雷达导航(5分)雷达距离避险线导航操作四、雷达人工标绘(必过)(20分,15min )1、观测并标绘,求目标船的航向、航速、CPA 及TCPA 。
雷达(幻灯片)(6)(ARPA)PPT课件

显然,N大,目标不易丢失。M大,不易发生误将干扰认为目 标的错误。故6/8比2/3的检测性能好。
二.局限性(P113) 1.由于采用低亮度显示,仅提供原始视频显示回波图像, 杂波处理简单,图像质量差,因而难以确保在杂波干扰背 景中可靠识别物标回波。 2.由于采用实时扫描,只能显示目标的当前位置,不能直 接显示目标的航向、速度,更不能预测未来及显示历史航 迹,因而不能看清现场运动态势,难以判断目标是否存在 碰撞危险。 3.由于不能直接给出碰撞参数,只能通过人工标绘求出, 费时、不直观、不准确,不适应多目标、快速逼近及机动 频繁的场合。 4.不能直接验算避碰效果。
用矢量前方的六边形表示预测危险 区PAD(Predicted Area of Danger) ,有真矢量和相对矢量可供选择。其 特点是避碰应用直观、简便。但多目 标时屏面混乱。目前仅SPERRY公司 采用。 三 按显示方式分类: 1 径向圆周扫描 2 TV光栅扫描
09.11.2020
9
第二章 ARPA基本工作原理(P119)
操船指令
09.11.2020
7
第三节 ARPA系统的分类及特点(P117) 一.按系统组合方式分类 1.分立式ARPA系统 2.组合式ARPA系统
ቤተ መጻሕፍቲ ባይዱ
09.11.2020
8
二.按显示目标动态的方式分 1.矢量型ARPA
用矢量表示本船和被跟踪船的动态 (包括当前位置、航向、速度、预测 位置等)。有真矢量和相对矢量可供 选择。其特点是综合画面清晰,为目 前多数ARPA所采用。 2.图示型ARPA
雷达操作与应用题卡(新)

评估项目:雷达操作与应用适用对象:9205、9206 500总吨及以上二/三副9209未满500总吨二/三副编号:JA1001~JA1010(编号印在正面,反面无编号)编码:JA1001评估时间:40分钟评估方式:口述+实操题目:一、雷达定位(总分:20分,时间:10分钟)1、雷达开机并调整图像在最佳状态。
(5分)2、雷达两物标距离定位,按《海图作业规范》在海图上标出船位。
(10分)3、简述选择雷达定位物标的基本原则。
(5分)二、雷达人工标绘(总分:20分,时间:15分钟)1、求目标船的航向、航速、CPA及TCPA。
(5分)2、要求CPA=2海里,根据规则的规定,求距目标船5海里时应采取的转向避让措施。
(5分)3、操纵船舶进行转向避让。
(5分)4、核查避让效果,并求取恢复原航向的时机。
(5分)三、雷达自动标绘、AIS报告目标及试操船(总分:60分,时间:15分钟)1、按CPA/TCPA设置准则设置CPA/TCPA(5分)2、手动捕获目标,简述容易发生目标丢失的各种情况。
(10分)3、读取指定目标的航向、航速、CPA及TCPA,简述本船机动以及目标船对数据的影响。
(10分)4、用跟踪目标矢量(PAD或DAC等)判断目标危险。
(10分)5、对雷达跟踪目标进行试操船求避让措施。
(15分)6、读取指定的AIS目标信息;指出指定的AIS目标的类型(休眠目标、激活目标、被选目标、危险目标、丢失目标和轮廓目标)。
(10分)编码:JA1002评估时间:40分钟评估方式:口述+实操题目:一、雷达定位(总分:20分,时间:10分钟)1、雷达开机并调整图像在最佳状态。
(5分)2、雷达单物标方位距离定位,按《海图作业规范》在海图上标出船位。
(10分)。
3、简述根据已知准确船位识别雷达回波的方法。
(5分)二、雷达人工标绘(总分:20分,时间:15分钟)1、求取目标船的航向、航速、CPA及TCPA 。
(5分)2、要求CPA=2海里,根据规则的规定,求距目标船6海里时应采取的变速避让措施。
福建船政职院雷达操作与模拟器课件02自动雷达标绘仪(ARPA)-1绪论

SHM
两船保速保向时预计的视运动
VR
B
VT
A(目标)
V0
D
CPA C
DCPA O (本船) 图2-1-1人工标绘图
SHM 两船保速保向时预计的视运动
VR
B
VT
A(目标)
V0
D
CPA C
DCPA O (本船) 图2-1-1人工标绘图
人工标绘进行避碰的步骤
1、选择要进行标绘的相遇船回波(A) 2、监视该目标回波的移动 3、隔一定时间间隔(6min)标出B点 4、作图并求碰撞及航行参数 ① 碰撞参数: DCPA:最接近会遇距离 TCPA:到达最接近点的时间
② 航行参数:
◆目标船相对速度(REL SPD)、相对航向( REL CRS)、真速度(TRUE SPD)和真航向(TRUE CRS) 5、CPA TCPA安全界限值( MINCPA 、 MINTCPA ) ① MINCPA(CPA安全界限值) 允许目标安全通过本船所需要求的最小会遇距 ② MINTCPA(TCPA的安全界限值) 允许目标到达CPA点的最小时间
第一章 绪 论
第一章 绪论
1-1 普通船用雷达用于船舶避碰的局限性 1-2 ARPA系统的组成及各部分作用 1-3 ARPA系统的分类
第一章 教学目的要求
1、掌握普通船用雷达用于船舶避碰的方法 2、充分认识普通船用雷达用于船舶避碰的
局限性 3、了解ARPA的发展概况和基本类型 4、掌握ARPA系统的组成及各部分作用 5、 知道ARPA有哪些输入输出信息
人工标绘的局限性
1)费时(3——7分钟)、麻烦 2)不直观、不准确 3)难以应付复杂局面 2、真运动雷达用于船舶避碰
二、普通船用雷达用于船舶避碰的局限性
雷达标绘课程介绍

雷达标绘判断碰撞危险、求取来船运动要素和安全避
ቤተ መጻሕፍቲ ባይዱ
让措施; 在开阔海域根据国际海上避碰规则进行避让练习; 受限水域航行; 紧迫局面情况下根据国际海上避碰规则进行紧急避让 练习。 人工标绘课重要性 雷达标绘的意义不仅仅在于标绘本身,而且在于它涉 及船舶几何避碰原理的基础,对于定量的研究和把握 避碰问题具有重要作用。
培训的基本内容
来船运动要素与本船避让后的避让效果分析
本船变向后来船相对运动线的变化规律; 本船变速后来船相对运动线的变化规律; 本船采取行动后来船DCPA和TCPA变化规律。
转向方向的选择和雷达转向避碰操纵示意图 多船避让中重点船的选择
转向不变线的概念及其应用
训练内容
熟悉本船雷达的性能及其操作;
参加海事局评估考试 参加上机评估 评估前完成作业
做在雷达运动图上,并标明题号。
课程要求
上机时候带好作图工具
雷达运动图每人4张; 铅笔; 橡皮; 三角板; 分规。
培训的基本内容
图解法判断是否存在碰撞危险:
标绘工具的使用; 相对运动矢量三角形; 求取来船的运动要素(重点是相对运动作图): 航向、航速、DCPA和TCPA; 求取安全避让措施(变向、变速或综合); 本船避让后回航的时机。
人工雷达标绘
船艺教研室
人工雷达标绘
概念理解——通过观察、测定目标回波点的距
离和方位,并在雷达作图器或专用标绘纸上进 行标绘、作图、计算以求得碰撞参数的过程。 标绘目的——求取目标船与本船之间的碰撞参 数(DCPA,TCPA),目标船航向、航速, 判断会遇态势,采取行动,最终避免碰撞。
课程要求
雷达操作与模拟器专业培训

(观测值小数点后保留一位)
作图注意事项 (1)用来标绘的回波资料至少应为3次以上的观测所获得 的资料; (2)若标绘所得三船位点不在一直线上,如果时间允许, 可再观测一次,以便核查误差所在或判断来船是否采取了 某种行动,若排除后者的可能性,可进行误差处理; (3)切线的选择。圆外一点向圆作切线有两条,主要是根 据本船所采取的避让行动是向左转向还是向右转向; (4)允许误差。角度:±5° 速度:±2kn 时间:±1min
T.M.L
B VT
V0
A
O (本船)
T VR
R.M.L
一、海上相对运动原理
以本船为参照系,则有速度矢量三角形关系:
VT VR Vo
TB TA AB
式中: VR:来船相对速度矢量 VT:来船真速度矢量 Vo:本船速度矢量
T.M.L
SHM
B VT
V0
A
O (本船)
的记录如下:
观测时间080°
距离
8'.0 6'.5
0112
试求:
077°
5'.0
(1)来船的航速、航速 (2)DCPA,TCPA。
作图方法
(1)先在作图纸上确定本船的位置,记为O1; (2)在O1点上标绘本船航向线; (3)根据本船的航速,在本船航向线上标定本船在不同的 观测时间的船位点,并分别记为O2,O3 ; (4)根据本船在不同观测时间获得的本船的回波方位与距 离,分别以各观测船位点为基点标绘来船的船位,并分别记 为T1,T2 ,T3; (5)连接T1,T3点,矢量T1T3的方向为他船的真航向,长度 为他船在T1,T3两观测点时间间隔(12min)内的航程,并将 其转换成来船的航速。来船的航向TC= ,V= ;
雷达标绘训练与自动评估系统设计

第46卷第2期2017年4月船海工程SHIP & OCEAN ENGINEERINGVol.46 No.2Apr.2017DOI:10. 3963/j. issn. 1671-7953. 2017. 02. 042雷达标绘训练与自动评估系统设计李业\任鸿翔\王鹏志2(1.大连海事大学航海动态仿真和控制交通行业重点实验室,辽宁大连116026;2.青岛海洋地质研究所,山东青岛266000)摘要:针对现有雷达标绘评估不能完全做到无纸化、全自动化的问题,利用W PF开发框架及C#语言设 计一种新型雷达标绘训练与自动评估系统。
该系统主要包括设备仿真子系统、试题子系统、评估子系统。
设 备仿真子系统提出雷达标绘作业元素化技术,可实现对雷达设备和雷达标绘作业的仿真;试题子系统制定评 估试题,题型做到了对雷达标绘评估纲要全覆盖;评估子系统借助于标绘作业元素化技术提出了一种对雷达 标绘过程评估的自动评估算法。
测试表明,该系统完全满足雷达标绘的训练与自动评估需求,可实现雷达标 绘评估的全自动化、无纸化。
关键词:雷达标绘;仿真;自动评估中图分类号:U665.22;TP391.9 文献标志码:A 文章编号:1671-7953 (2017)02-0180-05雷达是船舶必不可少的重要导航设备之一,主要应用于船舶定位、避碰与导航。
随着导航仪 器的发展,雷达完成了由普通雷达到新一代雷达 自动标绘仪(ARPA)的转变,另外船舶自动识别 系统(AIS)的应用也为判断会遇局面和碰撞危险 以及船舶避碰的协调提供了极大的方便[1]。
但 这并不意味着雷达标绘的重要性降低了,相反为 了更好地了解ARPA和应对ARPA无法使用的局 面,熟练掌握雷达标绘仍然很有必要。
国际海事 组织(IM0)A.482(XII)及 A.483(XII)号决议建 议缔约国政府应保证在进行ARPA培训之前进行雷达观测与标绘的培训,并指出驾驶员经过适当 培训并胜任人工标绘的重要性,鼓励该项培训使 用模拟器[2]。
雷达操作与应用评估题卡2013-甲类丙类——人工标绘(1)
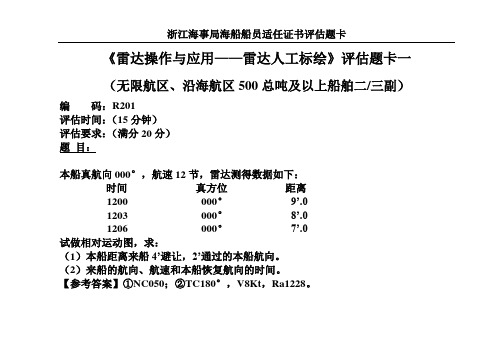
《雷达操作与应用——雷达人工标绘》评估题卡一(无限航区、沿海航区500总吨及以上船舶二/三副)编码:R201评估时间:(15分钟)评估要求:(满分20分)题目:本船真航向000°,航速12节,雷达测得数据如下:时间真方位距离1200 000°9’.01203 000°8’.01206 000°7’.0试做相对运动图,求:(1)本船距离来船4’避让,2’通过的本船航向。
(2)来船的航向、航速和本船恢复航向的时间。
【参考答案】①NC050;②TC180°,V8Kt,Ra1228。
《雷达操作与应用——雷达人工标绘》评估题卡二(无限航区、沿海航区500总吨及以上船舶二/三副)编码:R202评估时间:(15分钟)评估要求:(满分20分)题目:本船雾航,航向060°,航速8节,雷达测得数据如下:时间真方位距离1500 080°7’.01503 080°6’.51506 080°6’.0试做相对运动图,求:(1)来船的航向,航速,DCPA,TCPA。
(2)在1512计划使来船在我船左舷2’通过,我船应改驶何航向?【参考答案】①TC308°,V4Kt,DCPA0’.0,TCPA1542;②NC088。
《雷达操作与应用——雷达人工标绘》评估题卡三(无限航区、沿海航区500总吨及以上船舶二/三副)编码:R203评估时间:(15分钟)评估要求:(满分20分)题目:本船雾航,航向090°,航速12节,雷达测得回波数据如下:时间真方位距离0800 120°9’.00810 120°7’.00820 120°5’.0试做相对运动图,求:(1)来船的航向,航速,DCPA,TCPA。
(2)如果本船0820向右改向30°,需减几节才能使来船在3海里安全通过。
(3)本船变向变速后的TCPA。