第2章 自动雷达标绘仪(ARPA)综述
ARPA功能在沿岸水域航行中的应用
ARPA功能在沿岸水域航行中的应用[摘要]船用ARPA已成为船舶航行的重要助航设备,由于ARPA 在船舶避碰中有着可贵的优越性,因而在船舶避碰中获得广泛应用.ARPA的功能有自动检测、录取、跟踪、报警、安全判断、试操船等。
船舶驾驶员能够利用ARPA进行早期的判断与评估,避免盲目采取避让措施,最大限度的保证航行安全。
尤其是在沿岸水域航行的情况下,航线附近的危险物、障碍物较多,交通流密集,水文气象条件较为恶劣,ARPA的作用更显得尤为重要。
由于工作原理和设备性能等方的原因,ARPA 的功能还存在一定的局限性,船舶驾驶员如果完全信任和依赖ARPA进行避碰操作,就可能危及船舶的航行安全。
船舶驾驶员应了解ARPA 的局限性,正确使用其功能,才能保证航行安全。
课题研究的意义在于把搜集到的相关资料结合起来,通过分析ARPA的诸多功能在沿岸水域使用及其所存在的局限性,进一步的认识ARPA和了解ARPA,分析总结ARPA特点克服其局限性的措施,最大限度的发挥其功能,使ARPA能为航海安全发挥更大的作用。
[关键词] ARPA导航沿岸航行避碰局限性Abstract: The ARPA used on ship already become an important navigation equipment, it is used widely in avoiding collision due to its advantage. Its functions include: automatic detection, enrollment, tracking, alarm, safety judgment, try exercise ship and so on. Officer can judge and assess the navigation earlier by ARPA, and avoid useless measures to be taken, then make sure the safety navigation. Especially coastal sailing, there are many danger and obstruction around the voyage, so is busy traffic and bad hydrometeors, ARPA is the key of navigation. ARPA has limitation in the principle and instrument function, if the officer handles the ship to prevent the collision on the basis of trust and reliance on the ARPA, the navigation safety would be dangerous. The officer should know the limitation of the ARPA and use the ARPA correctly to ensure the navigation safety. The meaning of the article is the combination of the relevant resource, by analyzing the functions using in coast and its limitations. We can familiar with ARPA, understand ARPA, analyze ARPA, find out the countermeasures, so the ARPA can bring more safety to navigation.Key Words :ARPA navigation coastal sailing collision avoidance limitations目录目录 (3)引言 (4)第一章ARPA功能简介 (4)1.1ARPA的组成及工作原理 (4)1.2ARPA的主要功能 (5)1.3ARPA导航功能的简介 (5)1.3.1 导航线、导航标志的设置与显示 (5)1.3.2 港口视频地图 (6)1.3.3 电子海图的存贮与调用 (6)1.3.4 锚位监视 (6)第二章ARPA功能在沿岸水域航行的运用和分析 (7)2.1沿岸航行的特点 (7)2.2ARPA功能在避碰中的运用和分析 (7)2.2.1 ARP A用于判断相遇态势 (7)2.2.2 ARP A用于碰撞危险估计 (9)2.2.3 ARP A用于求取避让措施 (11)第三章分析ARPA的局限性及影响 (11)3.1ARPA外围设备所引起的局限性 (11)3.1.1雷达设备引起的局限性 (11)3.1.2各种传感器的误差所引起的局限性 (12)3.2计算机的性能引起的ARPA功能的局限性 (12)3.3ARPA自身的设计原理导致的功能局限性 (13)3.4ARPA在操作和使用上的局限性 (16)第四章使用ARPA应注意的问题 (17)结束语 (18)致谢词 (18)[参考文献] (19)引言按照ARPA的定义,它是“自动雷达标绘仪”的意思。
中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法
中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法关于颁布《中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法》的通知港监字[1997]330号各省、自治区、直辖市港航监督,部属各港务监督(局):为了履行经1995年修正的《1978年海员培训、发证和值班标准国际公约》,提高船员雷达操作技能,现颁布《中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法》(见附件),请遵照执行。
为了实施《中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法》,现将有关事项通知如下:一、授权大连、天津、青岛、上海、广州、湛江港务监督开展雷达操作和模拟器专业培训的考试和发证工作,并负责培训的监督管理。
二、开展雷达操作和模拟器专业培训的考试和发证工作的港务监督应满足以下条件:1、在保证其他各项船员管理工作正常开展的前提下,负责雷达操作和模拟器专业培训的考试和发证专业管理人员不少于两人,管理人员应具有相应的专业知识和管理素2、配备相应的国际公约、国内法规等有关资料和出版物。
3、采用计算机管理手段,建立雷达操作和模拟器专业培训管理系统,配备我局制定的专用软件和打印设备。
三、在《中华人民共和国船员雷达操作与模拟器专业培训、考试和发证办法》颁布前,业经完成“雷达观测和模拟”和“自动雷达标绘仪”专业培训的船员,可向有关港务监督申请换发雷达操作和模拟器专业培训合格证。
四、在3000总吨及以上海船上任职的船长和驾驶员应在1998年8月1日前完成雷达操作与模拟器专业培训;在500一3000总吨海船上任职的船长和驾驶员在2002年2月1日前完成雷达操作与模拟器专业培训。
在500总吨以下海船上任职的船长和驾驶员暂不强制要求完成雷达操作与模拟器专业培训。
五、有关船员培训机构,可根据当地培训需求的实际情况积极筹备开展雷达操作与模拟器专业培训。
筹备前应按照《中华人民共和国船员培训管理办法》的程序和要求,向我局提出书面申请,经我局同意后方可开展筹备工作。
雷达与ARPA(幻灯片)(ARPA4)
2012-8-8
17
第三节 ARPA的局限性 如上所说,ARPA有很多优点,但必须看到,由于目前技术水平的限制,还存在 很多不足,应予警惕。其局限性主要表现在如下几方面: 一.传感器引入的局限性 1.雷达的探测能力、分辨力、精度以及受气象、环境条件的限制, 2.罗经、计程仪的误差等 二.自动检测的局限性 三.录取的局限性 四.跟踪的局限性 1.跟踪可靠性的限制 主要是存在误跟踪和目标丢失率高。 2.存在跟踪处理延时 一般,从录取到稳定跟踪约需3分钟;若有一方机动了,还须经约3分钟才能重 新稳定。 3.跟踪容量及显示目标矢量的数量受限制。 4.跟踪目标的距离及机动速度受限制。 如:最小距离(有的为0.1~0.15海里)、最大距离(有的为24,有的为36海里,甚至 更多)、最大相对速度(有的为80节,有的为150节)及最大相对回转速度( )等。
试操船含义当相遇船和本船出现碰撞危险报警时在不中断目标信息更新的情况下模拟本船机动对所有被跟踪目标的影响即利用arpa模拟计算显示人工输入的本船航向或和速度对被跟踪目标的碰撞形势的影响进而求出避让安全的航向和速度此时arpa不中断对被跟踪目标的跟踪计算及信息更新这就arpa的试操船功能
第五节
报警与测试
2012-8-8
12
四.注意事项 1)注意延时时间,应留有余地。 2)注意目标可能的机动,应监视目标的动向并注意可能出现的新 的危险,不可盲目信赖试操结果。 3)应用试操结果还应符合避碰规则。 4)要记住显示的状态是模拟的结果,应及时返回正常的显示。 5)试操船结果受雷达、罗经、计程仪及ARPA本身误差的影响,不 可盲目信赖,不可忽视了望。
2012-8-8
11
第二节 基本功能
三 :试操船功能的局限性:
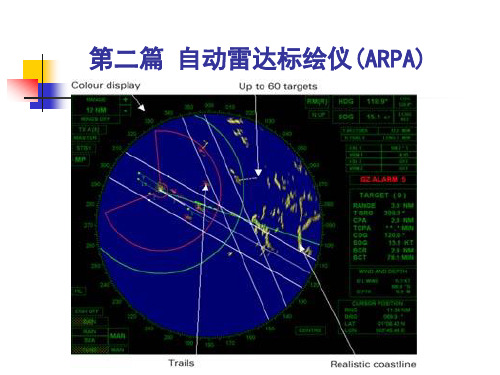
自动雷达标绘仪(ARPA)
1
②组合式
设备少、 价格低
精度高、 画面清晰 直观方便
2
按 显 示 目 标 动 态 方 式 不同分
①矢量型
②图示型 目 标 动 态 用 ( PAD 型 ) PAD显示 ①径向园 扫描 ②电视光 栅光标
3
按 扫 描 方式分
复习思考题:
1、普通船用雷达用于船舶避碰时有哪些局限性?
2、如何利用人工标绘求相遇船的碰撞参数? 3、画出ARPA系统的简框并简要说明其工作概况。 4、ARPA有哪些输入输出信息?
《航海雷达与ARPA〉第二篇
Ch1 绪论
2-1 各种传感信号的预处理
一、预处理的内容、必要性
1、必要性
5种传感器信号——模拟 → 数字 雷达回波处理:杂波抑制、检测判断等。 原始视频雷达信号的杂波处理及方位、距离信号 的量化处理; 陀螺罗经航向信号和计程仪航速信号的量化处理。
2、内容
《航海雷达与ARPA〉第二篇
CPA C
DCPA
O (本船)
图2-1-1人工标绘图
SHM
VR
B 两船保速保向时预计的视运动
A(目标)
V0
D
VT
CPA C
DCPA
O (本船)
图2-1-1人工标绘图
人工标绘进行避碰的步骤
1、选择要进行标绘的相遇船回波(A)
2、监视该目标回波的移动
3、隔一定时间间隔(6min)标出B点
360 0
0.088 0 212
《航海雷达与ARPA〉第二篇
Ch2 ARPA基本原理
如采用专用同步机加A/D转换器
模拟信号输入
数字信号输出
ARPA组成原理

第一节 基本组成部分及作用
C.M/N准则(M out of N—MOON): 累积判定目标存在的依据。每个量化单元内,连续存储和 检测N次距离扫描的回波数据,有为1,无为0;若回波累 积出现“1”的次数大于或等于M时,则判定此单元内有目标。 M、N取值影响自动检测的性能,一般M=1.5N1/2(取整数)。 M/N:2/3;3/4;4/4;5/6;6/8等。 a. N大(M小) 目标不宜丢失,容易发生误检;虚警率增加。 b. N小(M大) 容易漏掉目标,目标易丢失;干扰抑制好。 D.种类: a.滑窗检测器(Moving Window Detector):N=L b.小滑窗检测:N L,大多数采用
第一节 基本组成部分及作用
B.数据显示器:发光二极管(LED)、CRT、PPI旁空白区 (A)基本显示内容: a.本船数据:航向、航速 b.目标数据:距离、方位、(Range、Bearing) 真航向、真速度、(True Course、T Speed) 最接近会遇距离、到达最接近点时间 (Distance to Closest Point of Approach──DCPA) (Time to CPA──TCPA) (B)附加显示内容: a.矢量时间; b.历史航迹时间; c.流速流向(Drift); d.故障指示; e.录取符号离本船的距离和方位; f.目标相对速度航向; g.目标过船头距离时间(BCR&BCT—Bow Cross Range & Time) h.安全判据:MIN CPA、MIN TCPA
自动雷达标绘仪 (ARPA)
自动雷达标绘仪(ARPA)
ARPA——Automatic Radar Plotting Aids
第一节 基本组成部分及作用
回波原始视频 触发脉冲 X/S 波段 雷达 陀螺 罗经 计程仪 本船航速 外存器 视频海图等 预处理 触发脉冲 天线角位置 及船首信号 本船航向 输 入 、 输 出 接 口 目标 检测 目标 录取 跟 踪 器 操 作 指 令 计 算 机 操 船 指 令 PPI 综合 显示器 数据 显示器
雷达(2)显示方式及ARPA

一、雷达的显示方式——相对运动显示
1、船首向上显示模式 无需输入罗经航向,用H UP表示。 特点: (1)船首方向在荧光屏方位圈上为 0°,由此读取的其他物标方位是相对方位(即 舷角)——“相对方位显示方式”。 (2)本船 转向时,船首线始终指向固定刻度圈0°不动, 而周围目标则向相反方向以本船为中心作圆周 运动,在目标后面留下一段弧形尾迹,影响观 测。 它是一种图像不稳定的模式。
雷达显示方式和ARPA雷达 简介
一、雷达的显示方式
(一)显示方式分类 (二)相对运动的显示方式 (三)真运动的显示方式
2010年10月28日
一、雷达的显示方式
(一)显示方式分类 从本船(扫描中心)在荧光屏上的运动形式划分:
相对运动显示方式RM (Relative Motion) 真运动显示方式TM (True Motion) 以荧光屏正上方的指向划分: 船首线向上 H UP (Head Up); 指北向上 N UP (North Up); 航向向上CRS UP (Course Up)。
图像稳定情况
– 相对运动:一种图像不稳定显示,另两种图 像稳定显示。
– 真运动:全都属于图像稳定显示。
2010年10月28日
一、雷达的显示方式
各显示模式的全称 相对运动
– 船首向上图像不稳定的相对运动显示模式 – 指北向上图像稳定的相对运动显示模式 – 航向向上图像稳定的相对运动显示模式
真运动
– 指北向上图像稳定的真运动显示模式 – 航向向上图像稳定的真运动显示模式
2010年10月28日
一、雷达的显示方式——相对运动显示 3、航向向上显示模式优缺点 优点: 结合了船首向上和指北向上的优点,克 服了两种显示模式的不足。 不足: 使用起来不方便,特别是在高 速运动和转向时,恢复时间受到了一定 的限制
福建船政职院《雷达操作与模拟器》教学大纲
《雷达操作与模拟器》教学大纲一、雷达观测与标绘和雷达模拟器教学纲要二、自动雷达标绘仪(ARPA)教学纲要三、课程参考文献1.徐德兴等主编.《雷达观测与标绘》.北京:人民交通出版杜.1990年2.吴兆麟等主编.《雷达观测与标绘》.北京:人民交通出版杜.1990年3.王世远,《航海雷达与ARPA》,大连:大连海事大学出版社,1998.84.谬德刚主编.《航海雷达》.大连:大连海运学院出版社.1990年5.陈贞斌主编.《航海仪器》.大连:大连海运学院出版社.1995年6.刘文勇主编.《航海仪器》.大连:大连海运学院出版杜.1993年7.王世远编.《雷达与ARPA》.交通部上海船员培训中心.1994年8.董小兵主编.《ARPA原理》.大连海事大学自编讲义.1994年9.张润泽编著.《船舶导航雷达》,第三册.北京:人民交通出版社.1990年10.施智标编.《自动雷达标绘仪》.新世纪出版杜,1993年11.贾玉涛编译.《无线电导航》.北京:国防工业出版杜.1983年12.Automaticl Radar Plotting Aids Manual A.G Bo1e K.D.Jone.198l13.徐德云编.《船用雷达设备》(下册).大连:大连海运学院出版社.1990年14.张润泽主编.《船用导航雷达》北京:人民交通出版杜.1987年15.史伯涛主编.《船用雷达设备》(上册).大连:大连海运学院出版杜.1991年16.Marine E1ectronic Navigation Sencond,enlarged edition.S.F.Appleyard R.andP.J.Yarwood.198817.蔡希尧编著.《雷达系统概论》.北京:科学出版社,1983年18.袁安平、王新华、编著《船舶避碰》大连海远学院出版社1995年19.甄德福、罗世民、编著《船舶操纵与避碰》下册,人民交通出版社1989年。
航海雷达介绍
ERM
Extended Range Measurement
测距
EXPAND
ECHO stretch
展宽
F-SET
Factory Set
出厂设置
GAIN
GAIN
增益
GPS
Global Positioning System
全球定位系统
GZ
Guard Zone
警戒区
HDG
Heading
船首
HL
Heading Line
安装时,应避免显示单元遭受剧烈的震动或撞击,同时显示单元后侧应留有足够的空间以便维修。为确保显示单元在船舶的持续晃动下不会松动,请在安装处加固。
显示单元工作时产生的静电有一定的吸尘效应,系统容易沾染灰尘。当灰尘附在集成电路表面时,会造成散热不畅,严重时会导致集成电路板短路。安装处要注意洁净。
雷达系统正常工作所需的电压为直流24伏(24V DC),稳定的电压对雷达系统的正常运行非常重要。不稳定的电压或者瞬间尖峰的电流对系统都会造成致命的伤害。在低电压的情况下,雷达系统无法正常工作。如船电不为直流24伏时,请加装电源变压器。
脉宽C
P/L C
12
红
+400伏电压
+400V
13
蓝
调谐
TUNE
14
白蓝
调谐指示
TUNIND
15
绿
电机+24伏
MOTOR+
16
黑
接地
MOTOR-(GND)
17
桔红
船首
HEADING
注意
安装时引脚名称必须和接线排上的名称准确一一对应。
接线排上有三个标有GND的接线孔,接线时,GND引脚与任意一个标有GND的接线孔连接均可。
航海雷达与ARPA

自 动 延 时 开 关
门 开 关
特高压 电源
去接收机
高压保险丝
中频电源
2.调制器及预调制器: 触发脉冲一到,预调制器输出具有一定宽度的 小功率正方波,控制预调制器产生的方波的起始时 刻,预调制器产生的方波控制调制器,使调制器产 生大功率负高压脉冲。有的雷达没有预调制器,预 调制器的功能由调制器完成。
雷 达 电 源 船电
触发电路输 出 发射机输出 接收机输入
接收机输出
显示器 扫描示意
天 线
方位同步系 统产生的方 位信号
收发开关
发射机
接收机
触发电路
显示器
天 线
触发电路输 出 发射机输出 接收机输入
方位同步系 统产生的方 位信号 收发开关
接收机输出
发射机
显示器 扫描示意
接收机
4)天 线: 把发射机送来的微波能量聚成 细束朝一个方向发射出去,同时只接 收从该方向反射的回波。 5)接 收 机: 将天线送来的回波信号,进行 混频、放大、检波处理。得到表示目标 大小的视频信号。 6)显 示 器: 在屏上产生一条径向亮线,叫扫描线,该 扫描线随天线同步转动,用径向亮线上的加亮 点,来显示目标的存在,中心点代表本船。 亮点到中心点的距离,方位可以在屏幕上直接 测量得到。
•《 1974年国际海上人命安全公约1981 年修正案》规定了不同吨位船舶安装雷 达和自动雷达标绘仪的台数和日期。 •国际海事组织也先后通过航海雷达和自 动雷达标绘仪的性能标准。
基本概念
雷达: ——Radar ——Radio detection and ranging —— 无线电探测和测距。 定义: 雷达是一种通过发射电磁波和接 收回波,对目标进行探测和测定目标 信息的设备。
雷达(幻灯片)(6)(ARPA)PPT课件

显然,N大,目标不易丢失。M大,不易发生误将干扰认为目 标的错误。故6/8比2/3的检测性能好。
二.局限性(P113) 1.由于采用低亮度显示,仅提供原始视频显示回波图像, 杂波处理简单,图像质量差,因而难以确保在杂波干扰背 景中可靠识别物标回波。 2.由于采用实时扫描,只能显示目标的当前位置,不能直 接显示目标的航向、速度,更不能预测未来及显示历史航 迹,因而不能看清现场运动态势,难以判断目标是否存在 碰撞危险。 3.由于不能直接给出碰撞参数,只能通过人工标绘求出, 费时、不直观、不准确,不适应多目标、快速逼近及机动 频繁的场合。 4.不能直接验算避碰效果。
用矢量前方的六边形表示预测危险 区PAD(Predicted Area of Danger) ,有真矢量和相对矢量可供选择。其 特点是避碰应用直观、简便。但多目 标时屏面混乱。目前仅SPERRY公司 采用。 三 按显示方式分类: 1 径向圆周扫描 2 TV光栅扫描
09.11.2020
9
第二章 ARPA基本工作原理(P119)
操船指令
09.11.2020
7
第三节 ARPA系统的分类及特点(P117) 一.按系统组合方式分类 1.分立式ARPA系统 2.组合式ARPA系统
ቤተ መጻሕፍቲ ባይዱ
09.11.2020
8
二.按显示目标动态的方式分 1.矢量型ARPA
用矢量表示本船和被跟踪船的动态 (包括当前位置、航向、速度、预测 位置等)。有真矢量和相对矢量可供 选择。其特点是综合画面清晰,为目 前多数ARPA所采用。 2.图示型ARPA
航海英语(23)
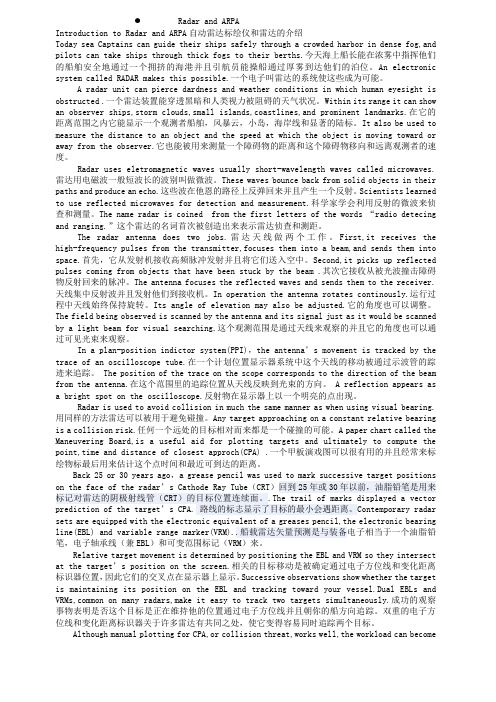
Radar and ARPAIntroduction to Radar and ARPA自动雷达标绘仪和雷达的介绍Today sea Captains can guide their ships safely through a crowded harbor in dense fog,and pilots can take ships through thick fogs to their berths.今天海上船长能在浓雾中指挥他们的船舶安全地通过一个拥挤的海港并且引航员能操船通过厚雾到达他们的泊位。
An electronic system called RADAR makes this possible.一个电子叫雷达的系统使这些成为可能。
A radar unit can pierce dardness and weather conditions in which human eyesight is obstructed .一个雷达装置能穿透黑暗和人类视力被阻碍的天气状况。
Within its range it can show an observer ships,storm clouds,small islands,coastlines,and prominent landmarks.在它的距离范围之内它能显示一个观测者船舶,风暴云,小岛,海岸线和显著的陆标。
It also be used to measure the distance to an object and the speed at which the object is moving toward or away from the observer.它也能被用来测量一个障碍物的距离和这个障碍物移向和远离观测者的速度。
Radar uses eletromagnetic waves usually short-wavelength waves called microwaves.雷达用电磁波一般短波长的波别叫做微波。
雷达与arpa实验报告

雷达与arpa实验报告1. 实验目的本实验旨在通过搭建雷达系统并了解其基本原理,亲自操作雷达设备,并尝试使用ARPA 技术进行目标跟踪和测量。
2. 实验器材和原理2.1 实验器材- 雷达设备(包括主机、天线、控制系统等)- 计算机- ARPA 软件2.2 实验原理雷达是一种利用无线电波进行探测和测量的设备。
它通过将无线电波发送出去,并接收到由目标物体反射回来的信号来探测目标的位置和速度。
雷达系统由三个主要部分构成:发射机、接收机和天线。
发射机产生并发送连续无线电波,天线将发射的信号辐射出去,当信号遇到目标物体时,会被反射回来并由接收机接收和处理。
ARPA(自动雷达目标追踪与测量)是一种将雷达技术与计算机技术相结合的技术。
利用计算机的处理能力,ARPA 可以实现对多个目标的同时跟踪和测量,提高雷达系统的应用效果。
3. 实验步骤3.1 搭建雷达系统首先,我们需要将雷达设备搭建起来。
根据实验指导书中的说明,完成相应的连接和调试工作,确保雷达设备能够正常工作。
3.2 验证雷达的基本功能在正式进行ARPA 实验之前,我们需要验证雷达设备的基本功能是否正常。
通过设置天线方向和范围等参数,观察和记录雷达设备发射的无线电波的覆盖范围,并根据接收到的信号判断是否存在目标物体。
3.3 进行ARPA 实验将计算机与雷达系统相连接,并在计算机上运行ARPA 软件。
通过ARPA 软件,可以实现对目标物体的跟踪和测量。
根据指导书中的步骤设置相应的参数,开始进行ARPA 实验。
在ARPA 实验中,我们可以观察到雷达的工作情况、目标物体的运动轨迹等信息。
根据ARPA 系统的分析,我们还可以获取目标物体的距离、速度等测量结果。
通过与实际情况的对比,评估ARPA 技术的准确性和可靠性。
4. 实验结果与分析4.1 雷达的基本功能验证结果在进行基本功能验证时,我们观察到雷达设备成功发射无线电波,并从一定范围内接收到回波信号。
根据接收到的信号,我们可以明显地看到目标物体的存在。
航海雷达与ARPA

<航海雷达与ARPA>第一章基本工作原课第一节测距测方位基本原理1.测距a)利用电磁波特性:1).直接传播(微波波段)2).匀速传播(同一媒质中)3).反射特性(在任何两种媒质的边界面)b)计算公式:S=C(t2-t1)/2其中:S:目标和本船距离;t1:发射时刻;t2:接收时刻;C:电波速度;为300000公里/秒为准确测量(t2-t1),发射信号包络为矩形脉冲。
2.测向着天波的转动,实现不同方向的测距。
第二节基本组成及各部分作用1)触发电路:(触发电路决定工作开始的时间)2率,3电源,雷达电源有中频逆变器、中频变流机组二种。
1:触发脉冲产生器:相当于时钟电路,使雷达各部分同步工作。
2.调制器及预调制器:触发脉冲一到,预调制器输出具有一定宽度的小功率正方波,控制预调制器产生的方波的起始时刻,预调制器产生的方波控制调制器,使调制器产生大功率负高压脉冲。
有的雷达没有预调制器,预调制器的功能由调制器完成。
所以;调制器是产生高压的部件。
3:磁控营:在调制器输出的负高压作用下,磁控营产生矩形调制的微波振荡脉冲.实现能量转换,调制器相当于高压电源。
5.2):磁控营基本结构及工作原理磁控营是实现微波振荡的元件,其结构、工作原理,与实际使用中的调试、维护等等事宜有关。
下面我们扼要介绍之。
A:基本结构阴极和阳极之间的空间,称为空腔,空腔内为真空。
空腔内,有永久磁铁提供的恒定磁场,如图示。
阴极内含有灯丝,加调制器送来的负高压前,灯丝先通电3min,用于加热阴极,阴极表面有氧化物涂层,加热使其产生自由电子,能量转换是自由电子完成的,没有3min加热,磁控管不能正常工作。
B:工作原理调制器负高压脉冲一到,阴极和阳极之间激起微波振荡。
阴极附件的自由电子,在飞向阳极过程中,由调制器提供的高压,使电子获得能量。
又在恒定磁场的作用下,把自由电子获得的能量,传给微波振荡,使原本微弱的微波振荡强大起来。
载波频率采用下列二种:S波段—(2900~3100)MHZ—10cm(波长)X波段—(9300~9500)MHZ—3cm(波长)5.4):工作状态判断:●微波辐射会发亮。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
课程性质
《船载航行设备》课程由航海雷达与 ARPA 、 航海仪器两部分组成,是海事管理专业必修的一 门专业课。根据专业培养目标的要求,本课程侧 重于了解目前在船舶上使用的航行设备的种类、 用途以及操作方法,能够初步掌握这些设备的基 本原理、使用方法以及维护与保养。本课程还结 合航海技术的发展趋势,介绍了一些近期的新型 航海仪器。
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
相对运动显示人工标绘图
VT VS 0°
060°
VR
相对运动 方位线
P
VS
10
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
相对运动显示人工标绘图
7
《船载航行设备》
第一章 船用雷达
主要内容
2.1 绪论 2.2 ARPA的工作原理 2.3 ARPA的操作使用
8
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
2.1 绪论
2.1.1 普通船用雷达在船舶避碰中的应用
船舶避碰 预测:预测相遇船和本船在何时何处将同时占据 海面上同一点或存在碰撞危险; 避让:本船对危险船采取的避让机动,使二者不同 时占据同一点或摆脱两船碰撞危险的局面。 .1 相对运动雷达用于船舶避碰——人工标绘避碰法 CPA—Closed Point of Approach:最近会遇点 DCPA—Distance to CPA:本船到CPA的距离 TCPA—Time to CPA:本船到CPA的时间 9
( 2 )由于采用实时扫描,只能显示目标的瞬时 位置、描绘目标和本船的位置,而不能直接显示目 标的航向、航速数据,更无预测未来及历史航迹的 显示功能,因而不能看清现场的运动态势,难以判 断本船和相遇船是否存在碰撞危险; 16
权利船
保向保速 加强了望
改向
减速指令
改向指令
15
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
普通船用雷达在船舶避碰中的应用
.2 普通雷达用于船舶避碰的局限性 ( 1 )由于采用低亮度显示,只提供原始视频显 示回波图像,杂波处理简单,图像质量差,因而难 以确保在杂波干扰背景中可靠识别相遇船回波;
《船载航行设备》
第一章 船用雷达
本船保向改速避让时的人工标绘
SHM
新航速
VR'
C2
R.M.L
C1
MIN CPA圆
13
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
相对运动雷达人工标绘避碰流程图
雷达 目标检测 人工标绘 计算目标的 C 、 V 、 R、θ、CPA、TCPA
武汉理工大学
4 6 2 6 4 6 6 4 4 6 4 52
6
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
第二章
自动雷达标绘仪(ARPA)
ARPA —— 船用雷达发展历史上的里程碑
武汉理工大学
Wuhan University of Technology
VT
SHM CPA 预测视运动
VR
P
-VS
DCPA
VS
速度三角形 要诀:至始反航向终连
o
武汉理工大学
Wuhan University of Technology
11
《船载航行设备》
第一章 船用雷达
本船保速改向避让时的人工标绘
SHM
向右转向
新航向
C2
R.M.L
C1
MIN CPA圆
12
武汉理工大学
Wuhan University of Technology
3
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
课程目标
本课程以课堂讲授为主并通过一定数量的实验 教学,使学生掌握航海雷达与ARPA、磁罗经、陀螺 罗经以及无线电导航、卫星导航系统的基本组成、 工作原理、性能(或功能)及操作使用方法;掌握 设备的维护保养及简单常见故障的判断方法,并能 正确地用于船舶定位、导航与避碰中。本课程的教 学目的是使得学生初步了解船舶重要导航设备的基 本原理和最新进展,并掌握部分设备操作的知识和 技能,锻炼学生综合运用知识的能力,培养学生的 实践能力。
5
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
教学环节 — 学时分配
教学环节 讲课 实验 0 0 0 0 2 0 0 0 0 0 2 4 小 4 6 2 6 6 6 6 4 4 6 6 56 计
课程内容
雷达基本工作原理及雷达设备 雷达使用性能及其影响因素 雷达定位与导航 ARPA的基本工作原理 雷达与ARPA的操作与使用 航海陀螺罗经的指北原理 航海陀螺罗经的结构、使用及维护 船用磁罗经分类、基本结构及使用 船用磁罗经自差矫正 无线电测向仪 卫星导航系统 合计
4
武汉理工大学
Wuhan University of Technology
《船载航行设备》
第一章 船用雷达
教学环节 — 教材
推荐教材: 《航海雷达与ARPA》 主 编:王世远 出版社:大连海事大学出版社 出版或修订时间:1998年 《航海仪器》 主 编:杨在金 出版社:大连海事大学出版社 出版或修订时间:1998年4月
人工设定MINCPA、MINTCPA
危险船?
YES NO
保向保速
TCPA有余?
武汉理工大学
NO
紧急操船
Wuhan University of Technology
14
《船载航行设备》
第一章 船用雷达
相对运动雷达人工标绘避碰流程图
YES
避碰规则、本船操纵性能、操船经验
权利船或 义务船 义务船 减速 改向或减速
《船载航行设备》
第一章 船用雷达
《船载航行设备》
航运学院航海技术系 2005.08.30
武汉理工大学
Wuhan University of Tec船用雷达
课程名称:《船载航行设备》
(Shipborne Navigational Equipments)
适用专业:海事管理 课程学时:50h 授课教师:刘成勇